
A Computationally Efficient Dynamic Grid Motion Approach for Arbitrary Lagrange–Euler Simulations

Abstract
:1. Introduction
2. Reminder of Navier–Stokes Equations in ALE Representation
2.1. ALE Kinematic Description
2.2. Standard Navier–Stokes Equations
2.3. Navier–Stokes Equation in ALE Form
2.4. Additional Mesh Equation
2.5. Discretization of Navier–Stokes Equations
2.6. Hyperbolic Equation for the Grid Motion
2.7. Weak Form of the Hyperbolic Grid Motion Problem
2.8. Space Discretization
2.9. Time Discretization
2.10. Stability Condition for the Explicit Time Integration
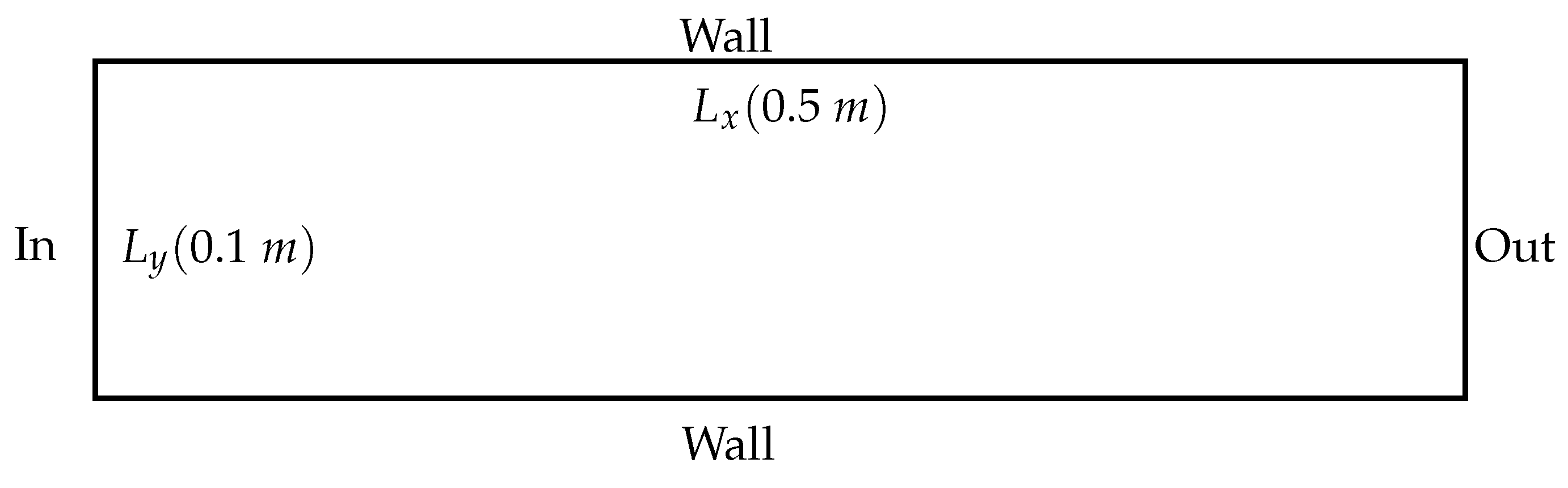
3. Basic Pseudo-1D Test to Characterize the Influence of Fictitious Material Coefficients
3.1. Test Setup
3.2. Analysis of the Influence of the Damping Coefficient
3.3. Analysis of the Influence of the Mass and Stiffness Coefficients
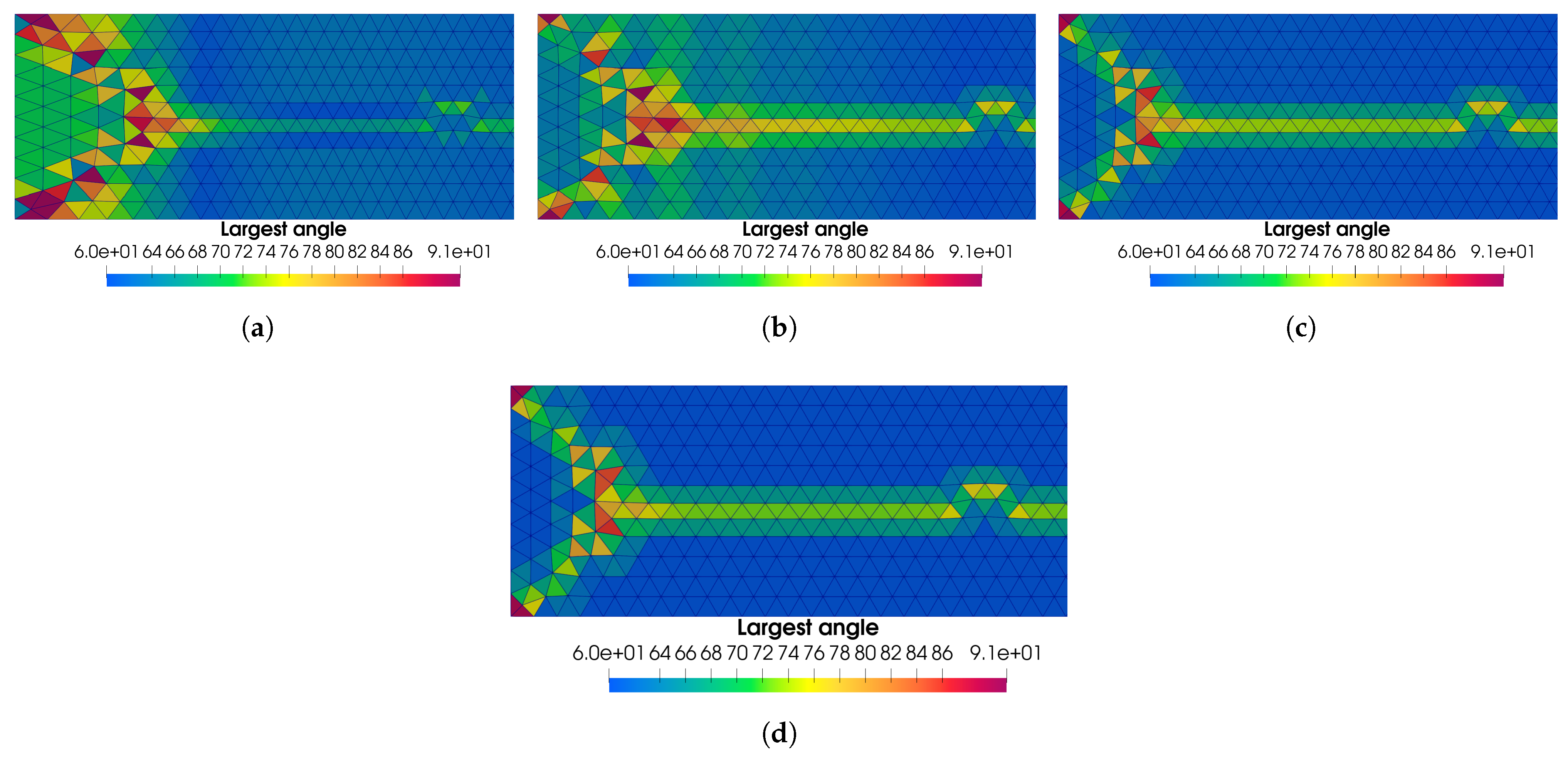
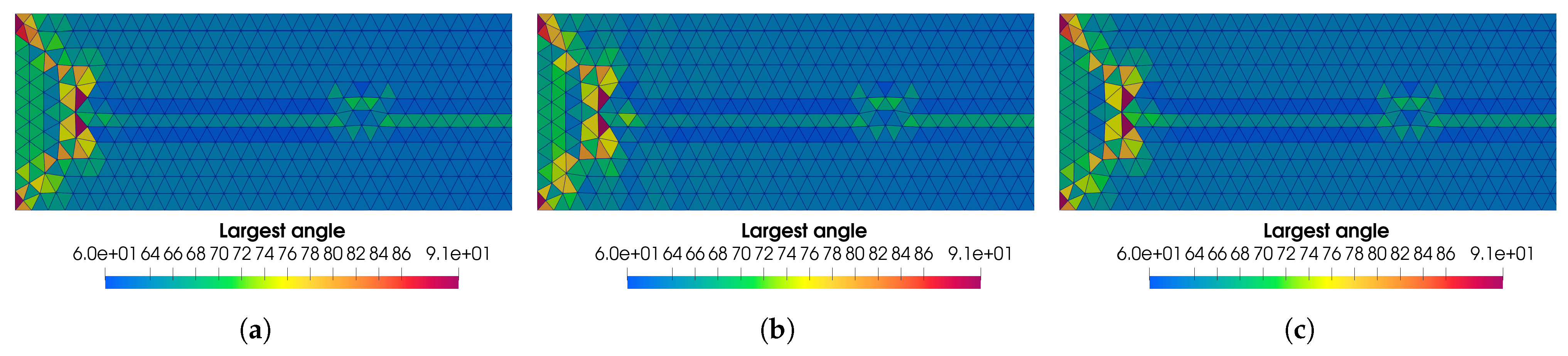
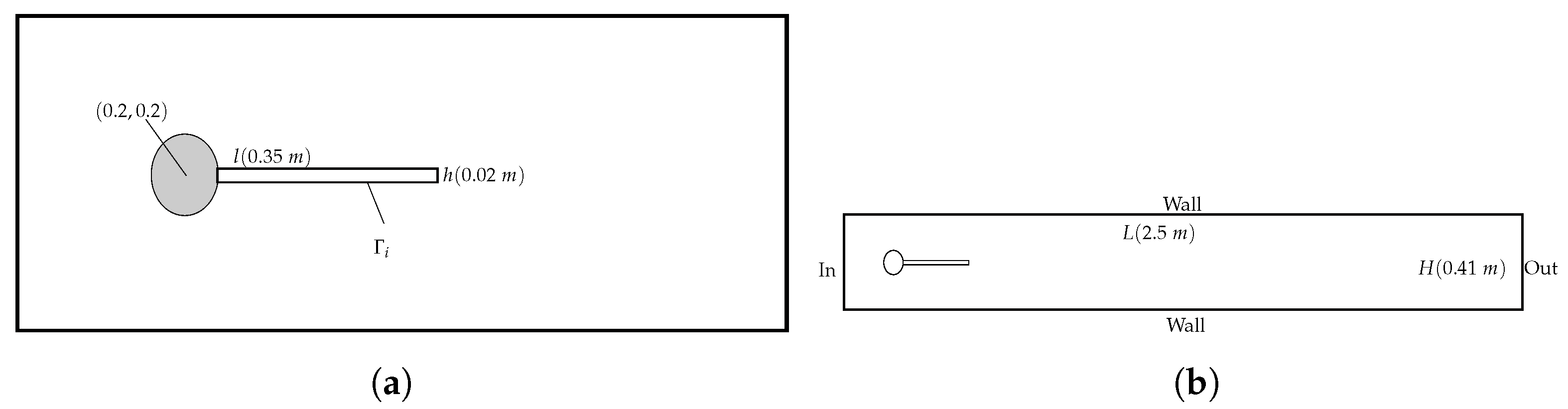
4. 2D Test Case Derived from Turek’s Benchmark with Imposed Motion
4.1. Presentation of the Turek Test Case
4.2. Boundary Conditions and Parameters
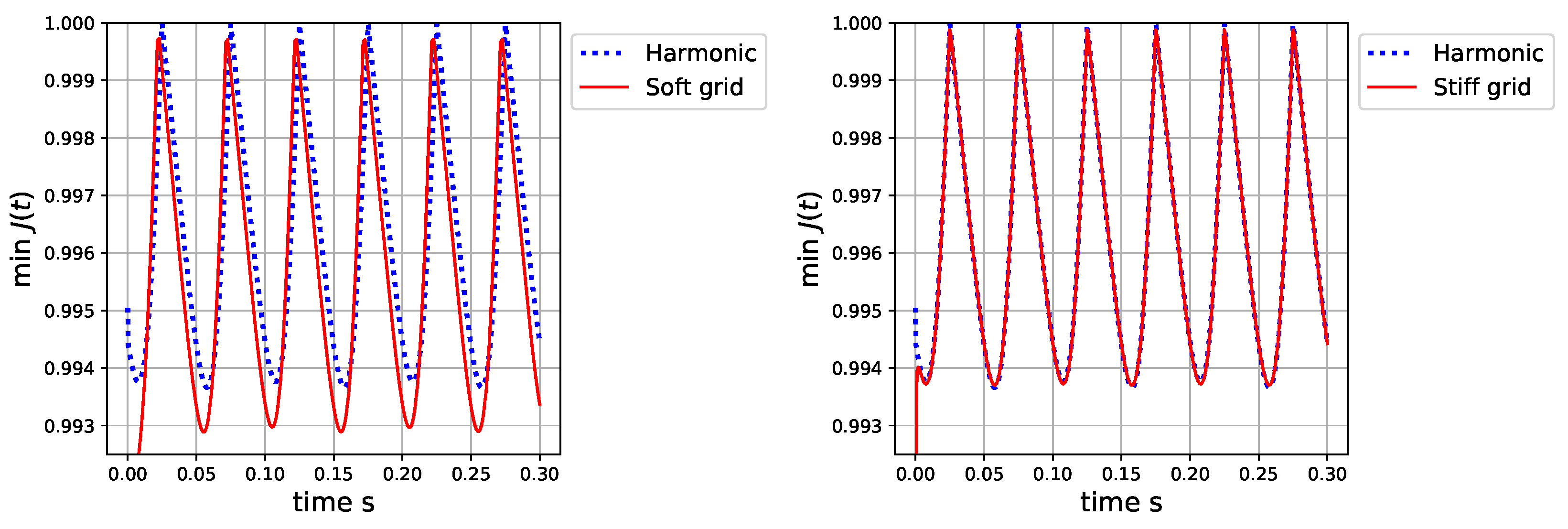
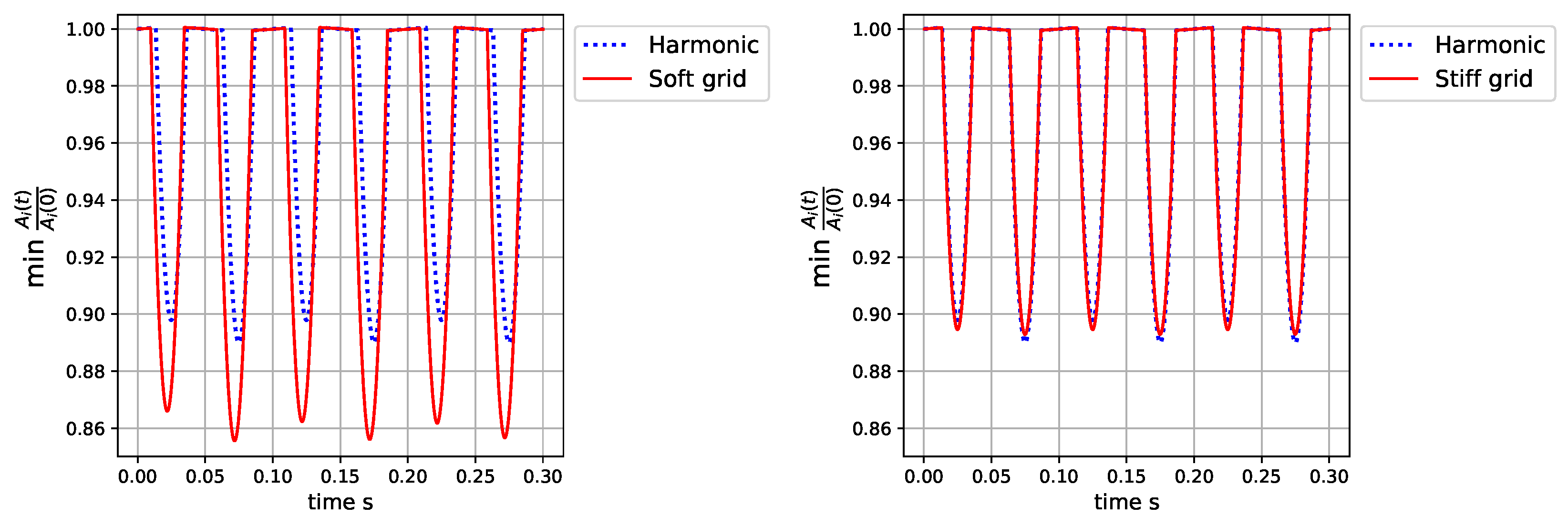
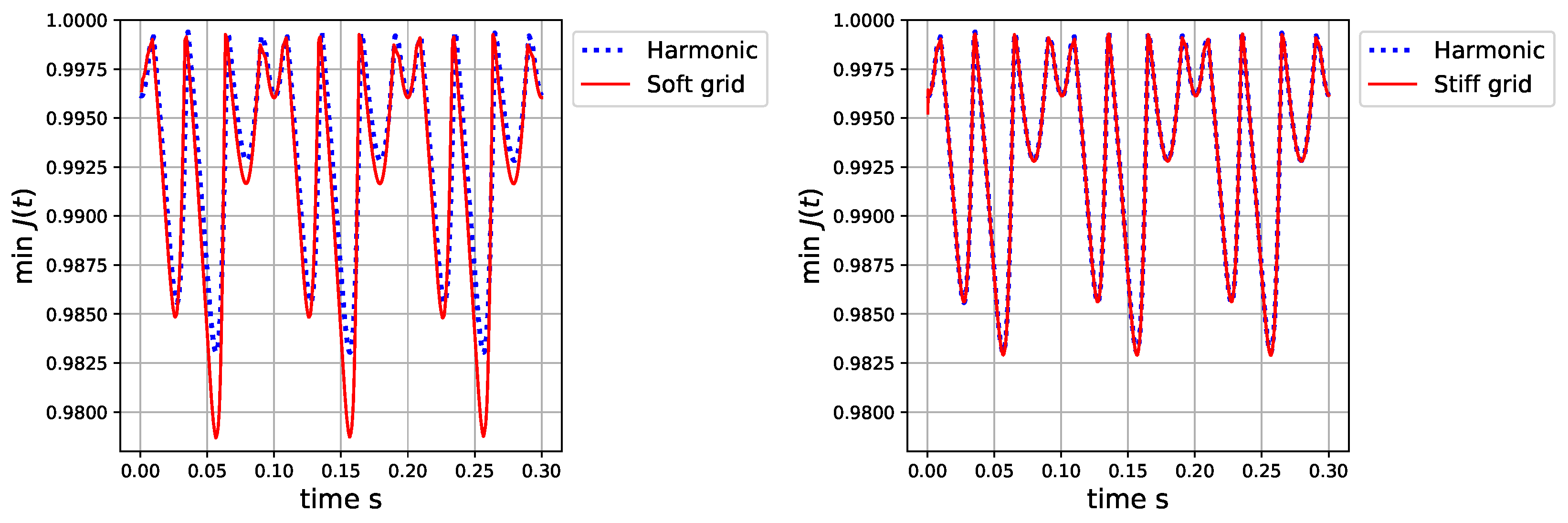
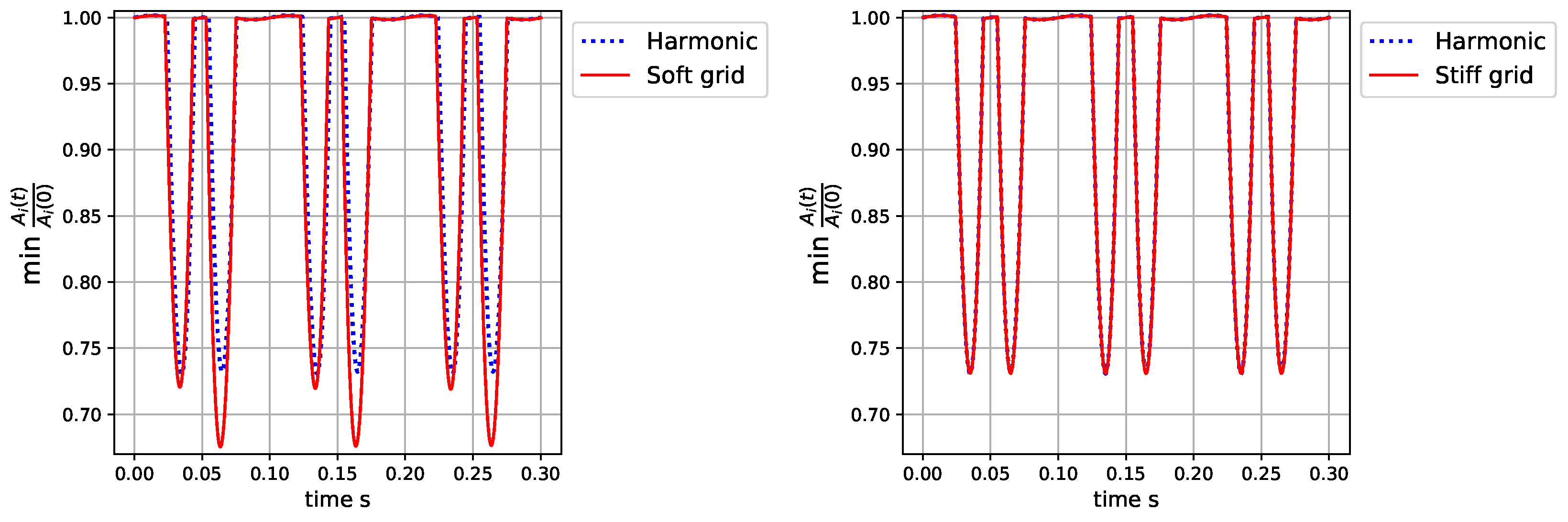
4.3. Analysis through a Comparison with the Harmonic Grid Motion
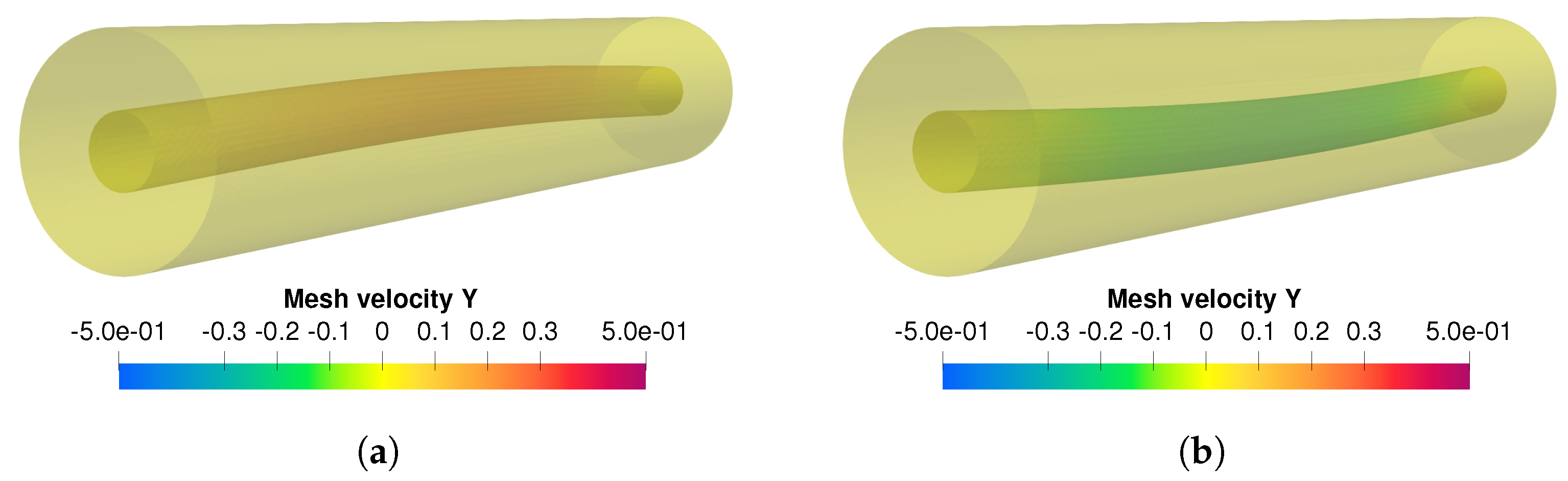
5. 3D Test Case for Computational Performance Analysis
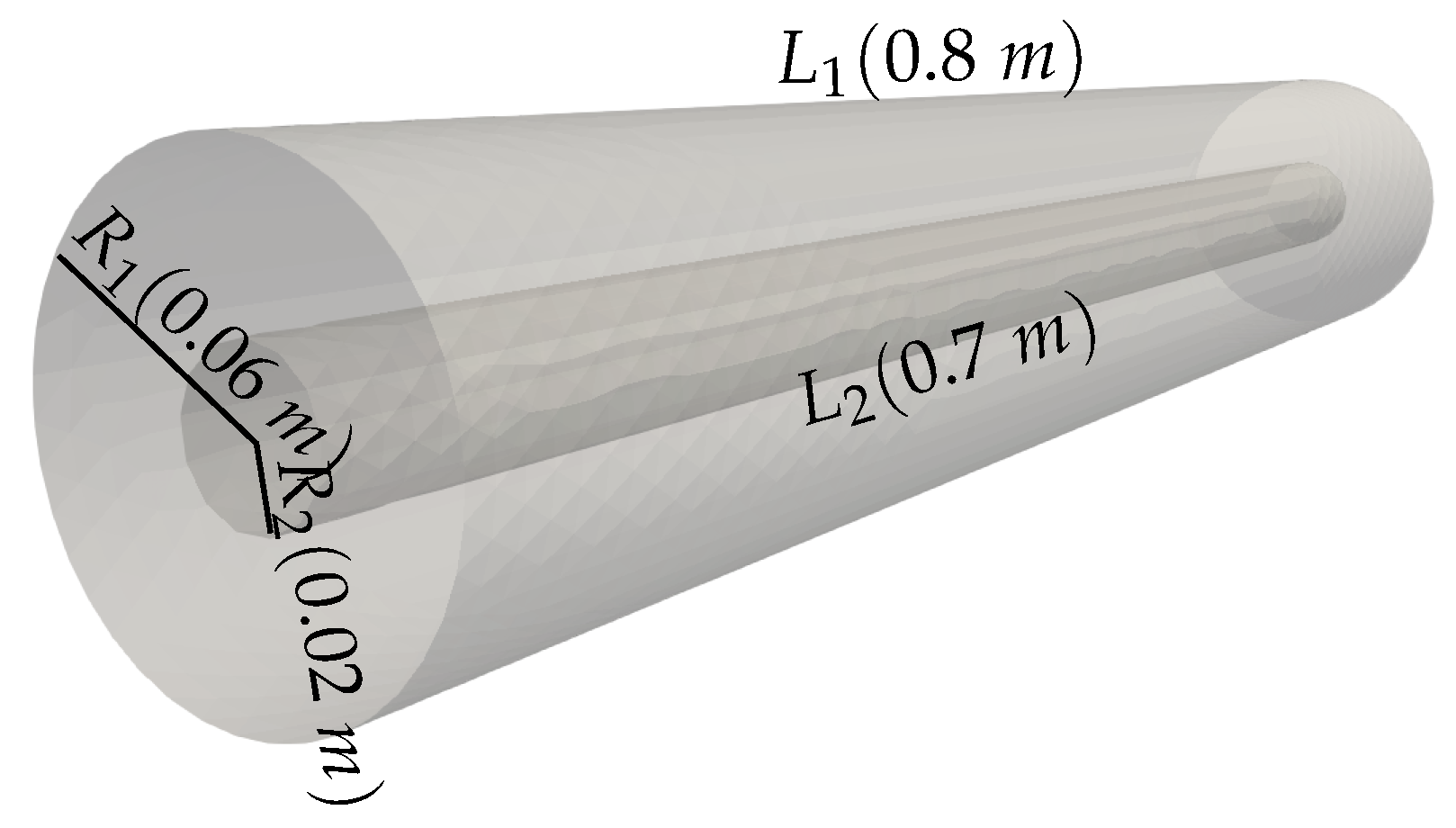
5.1. Description of the Test Case and Computational Parameters
5.2. Analysis of the Computational Performance for the Grid Problem Solution
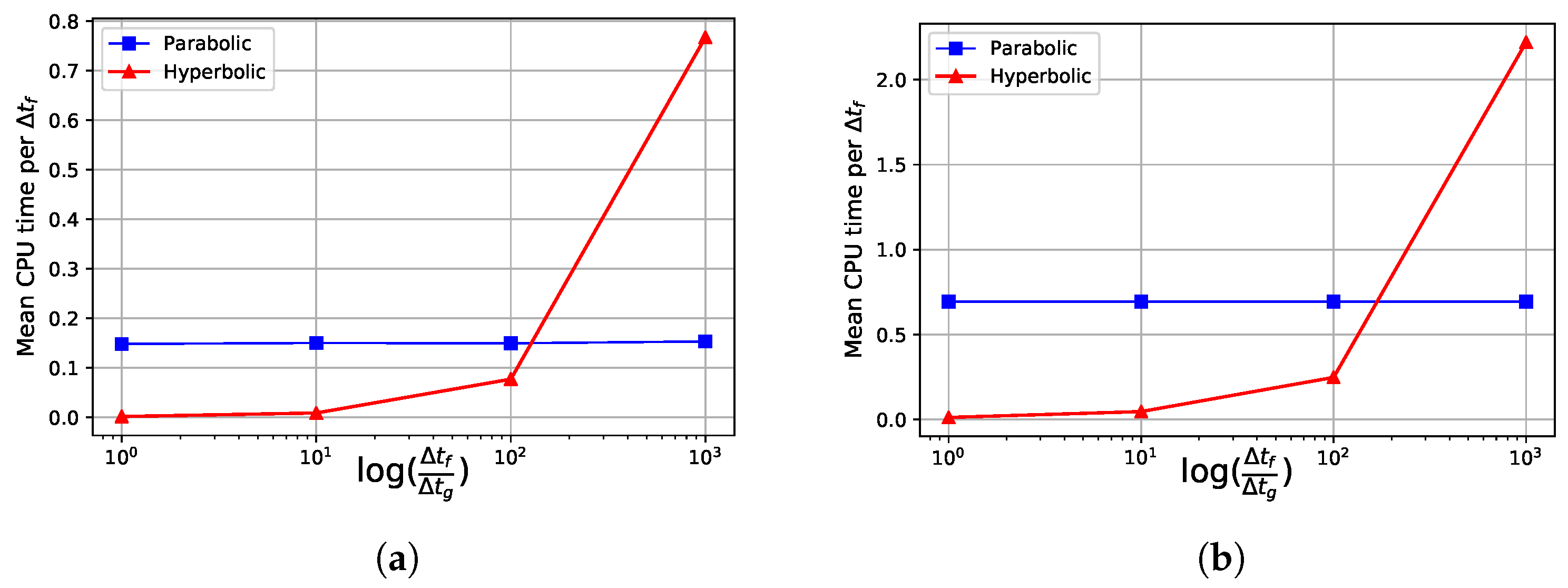
5.2.1. Study of the Critical Time Step Ratio Preserving the Performance of the Hyperbolic Grid Motion Solver
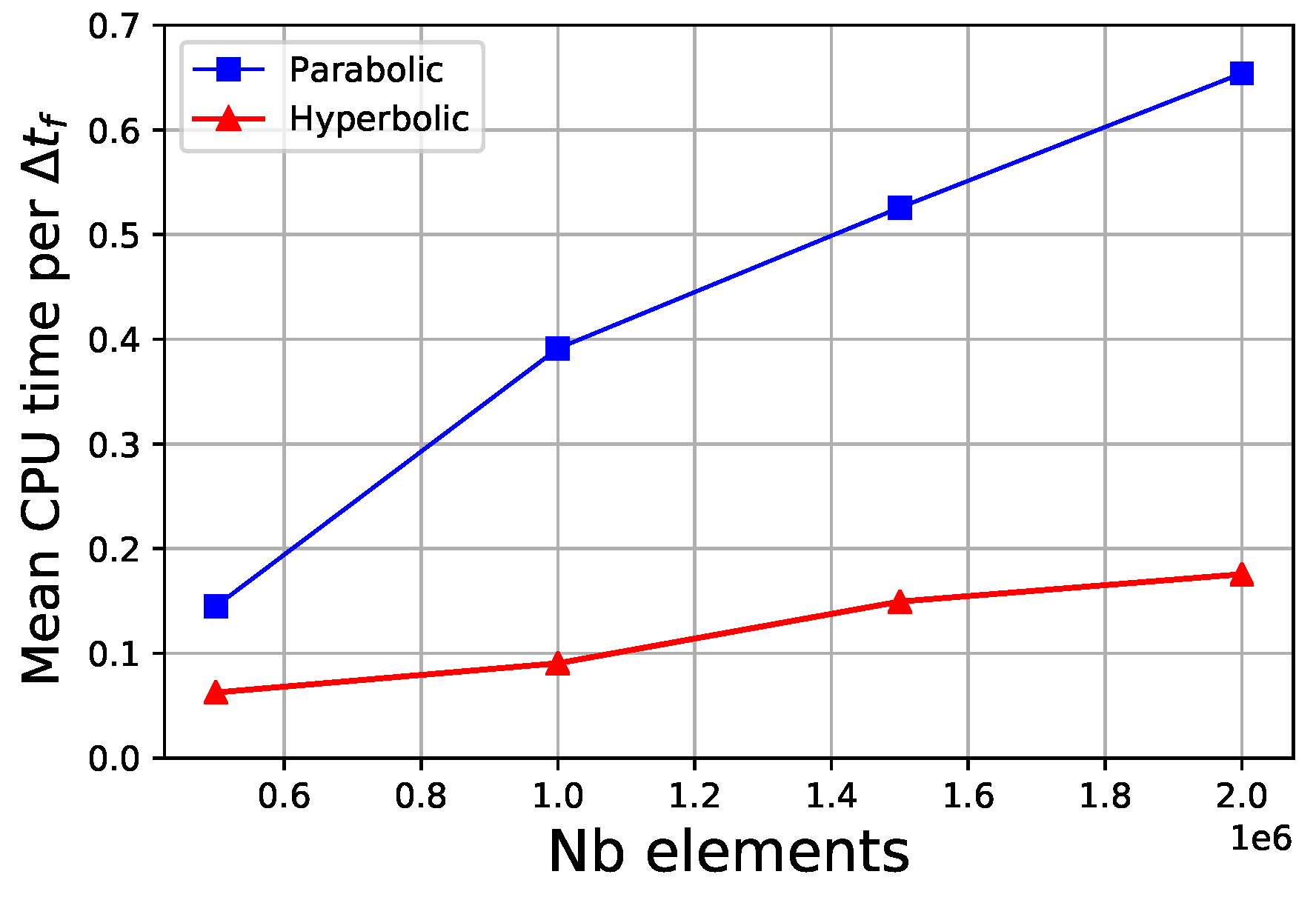
5.2.2. Evolution of the Computational Cost of the Grid Solver with the Mesh Size
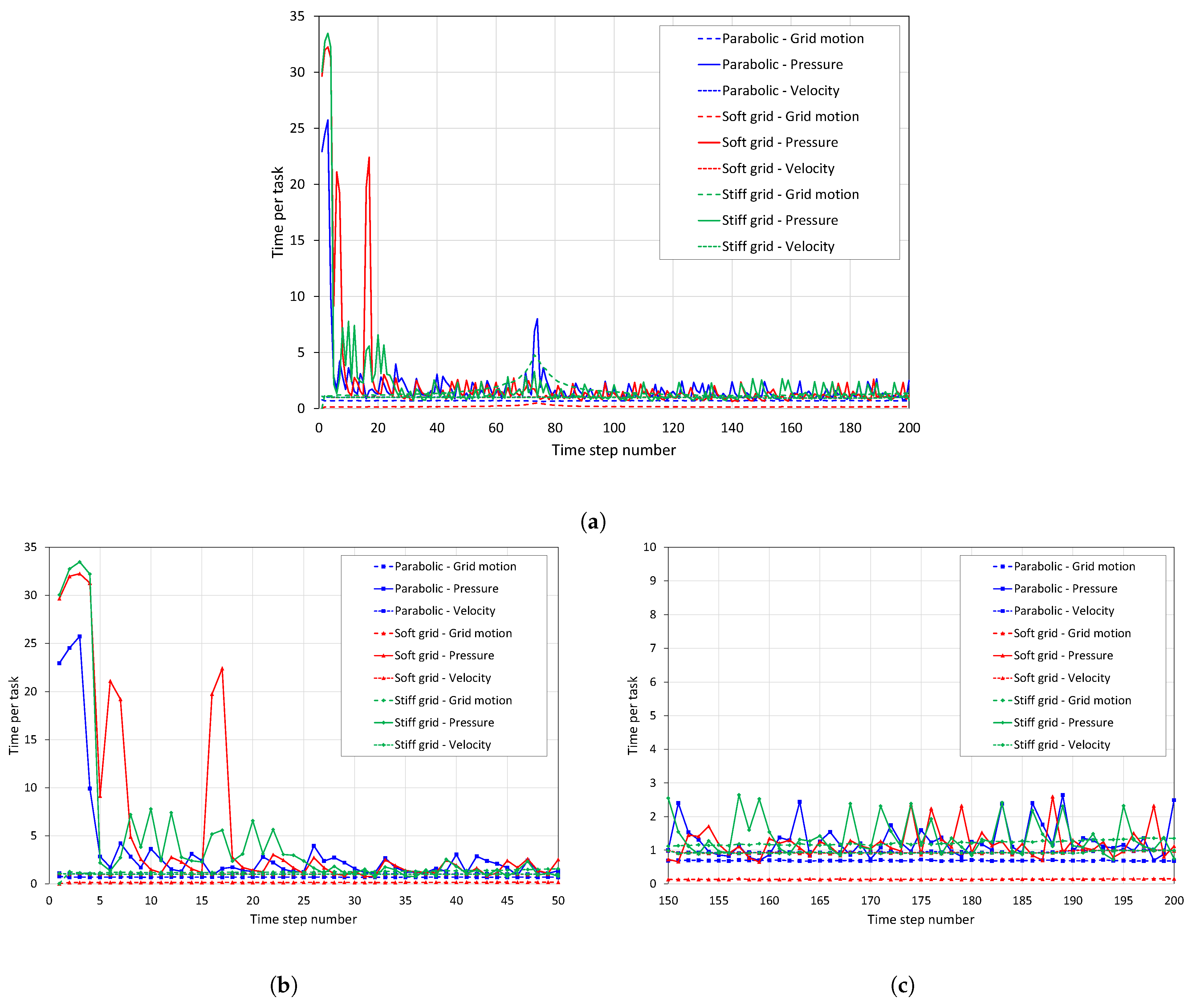
5.2.3. Study of Total Computation Time
- the costs for tasks Grid motion and Velocity are very stable,
- the most important cost is related to the Pressure task, and it exhibits some oscillations during the initial steps; this can be attributed to the velocity discontinuity at the initial step of the calculation,
- a stabilized regime is achieved after a certain number of steps (around 30).
6. Recommended Strategy for the Optimal Choice of Parameters Introduced by the Hyperbolic Grid Motion
- Section 3.3 and Section 5.2.3 show that the quality of the mass and stiffness parameters is related to the motion of the structural boundaries, including both amplitude and velocity,
- Figure 16 shows that the efficiency of the hyperbolic approach for the grid motion increases with mesh refinement.
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ALE | Arbitrary Lagrange–Euler |
| FSI | Fluid–Structure Interaction |
| CFL | Courant–Friedrich–Lewy |
| PCG | Preconditioned Conjugate Gradient |
References
- Gerbeau, J.F.; Vidrascu, M.; Frey, P. Fluid–structure interaction in blood flows on geometries based on medical imaging. Comput. Struct. 2005, 83, 155–165. [Google Scholar] [CrossRef]
- Formaggia, L.; Quarteroni, A.; Veneziani, A. (Eds.) Cardiovascular Mathematics: Modeling and Simulation of the Circulatory System; Number Volume 1 in Modeling, Simulation & Applications; Springer: Milan, Italy; Berlin/Heidelberg, Germany; New York, NY, USA, 2009. [Google Scholar]
- Piperno, S.; Farhat, C. Partitioned procedures for the transient solution of coupled aeroelastic problems- Part II. Comput. Methods Appl. Mech. Eng. 2001, 190, 3147–3170. [Google Scholar] [CrossRef]
- Lesoinne, M.; Farhat, C. Higher-Order Subiteration-Free Staggered Algorithm for Nonlinear Transient Aeroelastic Problems. AIAA J. 1998, 36, 1754–1757. [Google Scholar] [CrossRef]
- Ricciardi, G. Fluid-structure interaction modelling of a PWR fuel assembly subjected to axial flow. J. Fluids Struct. 2016, 62, 156–171. [Google Scholar] [CrossRef]
- Lagrange, R.; Piteau, P.; Delaune, X.; Antunes, J. Fluid-Elastic Coefficients in Single Phase Cross Flow: Dimensional Analysis, Direct and Indirect Experimental Methods. In Proceedings of the Volume 4: Fluid-Structure Interaction, San Antonio, TX, USA, 14–19 July 2019. [Google Scholar]
- Lu, D.; Liu, A.; Shang, C.; Dang, J.; Hong, Y.; Xie, Q. Experimental investigation on fluid–structure-coupled dynamic characteristics of the double fuel assemblies in a fast reactor. Nucl. Eng. Des. 2013, 255, 180–184. [Google Scholar] [CrossRef]
- Degroote, J. Partitioned simulation of fluid-structure interaction. Arch. Comput. Methods Eng. 2013, 20, 185–238. [Google Scholar] [CrossRef]
- Fernández, M.A. Coupling schemes for incompressible fluid-structure interaction: Implicit, semi-implicit and explicit. SeMA J. 2011, 55, 59–108. [Google Scholar] [CrossRef]
- Zhang, Q.; Hisada, T. Studies of the strong coupling and weak coupling methods in FSI analysis. Int. J. Numer. Methods Eng. 2004, 60, 2013–2029. [Google Scholar] [CrossRef]
- Puscas, M.A.; Monasse, L. A three-dimensional conservative coupling method between an inviscid compressible flow and a moving rigid solid. SIAM J. Sci. Comput. 2015, 37, B884–B909. [Google Scholar] [CrossRef]
- Monasse, L.; Daru, V.; Mariotti, C.; Piperno, S.; Tenaud, C. A conservative coupling algorithm between a compressible flow and a rigid body using an embedded boundary method. J. Comput. Phys. 2012, 231, 2977–2994. [Google Scholar] [CrossRef]
- Puscas, M.A.; Monasse, L.; Ern, A.; Tenaud, C.; Mariotti, C. A conservative Embedded Boundary method for an inviscid compressible flow coupled with a fragmenting structure. Int. J. Numer. Methods Eng. 2015, 103, 970–995. [Google Scholar] [CrossRef]
- Puscas, M.A.; Monasse, L.; Ern, A.; Tenaud, C.; Mariotti, C.; Daru, V. A time semi-implicit scheme for the energy-balanced coupling of a shocked fluid flow with a deformable structure. J. Comput. Phys. 2015, 296, 241–262. [Google Scholar] [CrossRef]
- Donea, J.; Huerta, A.; Ponthot, J.P.; Rodríguez-Ferran, A. Arbitrary Lagrangian-Eulerian Methods. In Encyclopedia of Computational Mechanics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004. [Google Scholar]
- Helenbrook, B.T. Mesh deformation using the biharmonic operator. Int. J. Numer. Methods Eng. 2003, 56, 1007–1021. [Google Scholar] [CrossRef]
- Dwight, R.P. Robust mesh deformation using the linear elasticity equations. In Computational Fluid Dynamics 2006; Springer: Berlin/Heidelberg, Germany, 2009; pp. 401–406. [Google Scholar]
- Faucher, V.; Bulik, M.; Galon, P. Updated VOFIRE algorithm for fast fluid–structure transient dynamics with multi-component stiffened gas flows implementing anti-dissipation on unstructured grids. J. Fluids Struct. 2017, 74, 64–89. [Google Scholar] [CrossRef]
- Wick, T. Fluid-structure interactions using different mesh motion techniques. Comput. Struct. 2011, 89, 1456–1467. [Google Scholar] [CrossRef]
- Stein, K.; Tezduyar, T.; Benney, R. Mesh Moving Techniques for Fluid-Structure Interactions With Large Displacements. J. Appl. Mech. 2003, 70, 58–63. [Google Scholar] [CrossRef]
- Yigit, S.; Schäfer, M.; Heck, M. Grid movement techniques and their influence on laminar fluid–structure interaction computations. J. Fluids Struct. 2008, 24, 819–832. [Google Scholar] [CrossRef]
- Angeli, P.E.; Bieder, U.; Fauchet, G. Overview of the TrioCFD code: Main features, V&V procedures and typical applications to nuclear engineering. In Proceedings of the 16th International Topical Meeting on Nuclear Reactor Thermal Hydraulics (NURETH-16), Chicago, IL, USA, 30 August–4 September 2015. [Google Scholar]
- Angeli, P.E.; Puscas, M.A.; Fauchet, G.; Cartalade, A. FVCA8 benchmark for the Stokes and Navier-Stokes equations with the TrioCFD code—Benchmark session. In Proceedings of the Finite Volumes for Complex Applications VIII—Methods and Theoretical Aspects, Lille, France, 12–16 June 2017; pp. 181–202. [Google Scholar]
- Bieder, U.; Rodio, M.G. Large Eddy Simulation of the injection of cold ECC water into the cold leg of a pressurized water reactor. Nucl. Eng. Des. 2019, 341, 186–197. [Google Scholar] [CrossRef]
- Panunzio, D.; Puscas, M.A.; Lagrange, R. Vibrations of immersed cylinders. Simulations with the engineering open-source code TrioCFD. Test cases and experimental comparisons. C. R. Mécanique 2022, 350, 451–476. [Google Scholar] [CrossRef]
- Nobile, F. Numerical Approximation of Fluid-Structure Interaction Problems with Application to Haemodynamics. Ph.D. Thesis, EPFL, Lausanne, Switzerland, 2001. [Google Scholar] [CrossRef]
- Piperno, S. Simulation Numérique de Phénomènes d’Interaction Fluide-Structure. Ph.D. Thesis, École National des Ponts et Chaussées, Champs-sur-Marne, France, 1995. [Google Scholar]
- Lohner, R.; Yang, C. Improved ALE mesh velocities for moving bodies. Commun. Numer. Methods Eng. 1996, 12, 599–608. [Google Scholar] [CrossRef]
- Fiorini, C.; Després, B.; Puscas, M.A. Sensitivity equation method for the Navier-Stokes equations applied to uncertainty propagation. Int. J. Numer. Methods Fluids 2021, 93, 71–92. [Google Scholar] [CrossRef]
- Guermond, J.L.; Minev, P.; Shen, J. An overview of projection methods for incompressible flows. Comput. Methods Appl. Mech. Eng. 2006, 195, 6011–6045. [Google Scholar] [CrossRef]
- Temam, R. Une méthode d’approximation de la solution des équations de Navier-Stokes. Bull. Société Mathématique Fr. 1968, 96, 115–152. [Google Scholar] [CrossRef]
- de Moura, C.A.; Kubrusly, C.S. The Courant–Friedrichs–Lewy (CFL) Condition. 80 Years after Its Discovery; Scientific Computation; Birkhäuser: Boston, MA, USA, 2013. [Google Scholar] [CrossRef]
- Turek, S.; Hron, J.; Razzaq, M.; Wobker, H.; Schäfer, M. Numerical Benchmarking of Fluid-Structure Interaction: A Comparison of Different Discretization and Solution Approaches. In Fluid Structure Interaction II; Springer: Berlin/Heidelberg, Germany, 2010; pp. 413–424. [Google Scholar]
- Razzaq, M.; Turek, S.; Hron, J.; Acker, J.; Weichert, F.; Grunwald, I.; Roth, C.; Wagner, M.; Romeike, B. Numerical simulation and benchmarking of fluid-structure interaction with application to hemodynamics. In Fundamental Trends in Fluid-Structure Interaction; World Scientific: Singapore, 2010; pp. 171–199. [Google Scholar]
- Sagaut, P. Large Eddy Simulation for Incompressible Flows; Scientific Computation; Springer: Berlin/Heiderberg, Germany, 2006. [Google Scholar] [CrossRef]
- Ogden, R.W. Large Deformation Isotropic Elasticity—On the Correlation of Theory and Experiment for Incompressible Rubberlike Solids. Proc. R. Soc. Lond. Ser. Math. Phys. Sci. 1972, 326, 565–584. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stiff grid | ∼ | |||
| Soft grid | ∼ |
| Mesh 1 | Mesh 2 | Mesh 3 | Mesh 4 | |
|---|---|---|---|---|
| Nb elements | ||||
| soft grid | ||||
| stiff grid | ||||
| 49 | 40 | 43 | 45 | |
| 486 | 395 | 431 | 446 |
| Problem features | Simple laminar problem, fluid initially at rest | Low velocity initial flow (around 1 or 2 m·s), laminar regime | Higher velocity initial flow (>5 m·s), turbulent regime | Extension to compressible fluid models |
| Characteristic time step ratio | 40 to 500 and more | 15 to 300 | 5 to 60 | Down to 1 or below |
| Competitiveness of hyperbolic equation | Critical (relevant for soft grid parameter, better with bigger meshes however) | Improved (for a wider range of grid parameters) | Strong | Crucial |
| Harmonic Grid | Soft Grid | Stiff Grid | ||||
|---|---|---|---|---|---|---|
| With initial transient | Stabilized regime only | With initial transient | Stabilized regime only | With initial transient | Stabilized regime only | |
| Grid Motion | ) | |||||
| Pressure | ||||||
| Velocity | ||||||
| Total | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leprevost, A.; Faucher, V.; Puscas, M.A. A Computationally Efficient Dynamic Grid Motion Approach for Arbitrary Lagrange–Euler Simulations. Fluids 2023, 8, 156. https://doi.org/10.3390/fluids8050156
Leprevost A, Faucher V, Puscas MA. A Computationally Efficient Dynamic Grid Motion Approach for Arbitrary Lagrange–Euler Simulations. Fluids. 2023; 8(5):156. https://doi.org/10.3390/fluids8050156
Chicago/Turabian StyleLeprevost, Antonin, Vincent Faucher, and Maria Adela Puscas. 2023. "A Computationally Efficient Dynamic Grid Motion Approach for Arbitrary Lagrange–Euler Simulations" Fluids 8, no. 5: 156. https://doi.org/10.3390/fluids8050156