
Manual of GUI Program Governing ABAQUS Simulations of Bar Impact Test for Calibrating Bar Properties, Measured Strain, and Impact Velocity

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Summary
2. Data Description
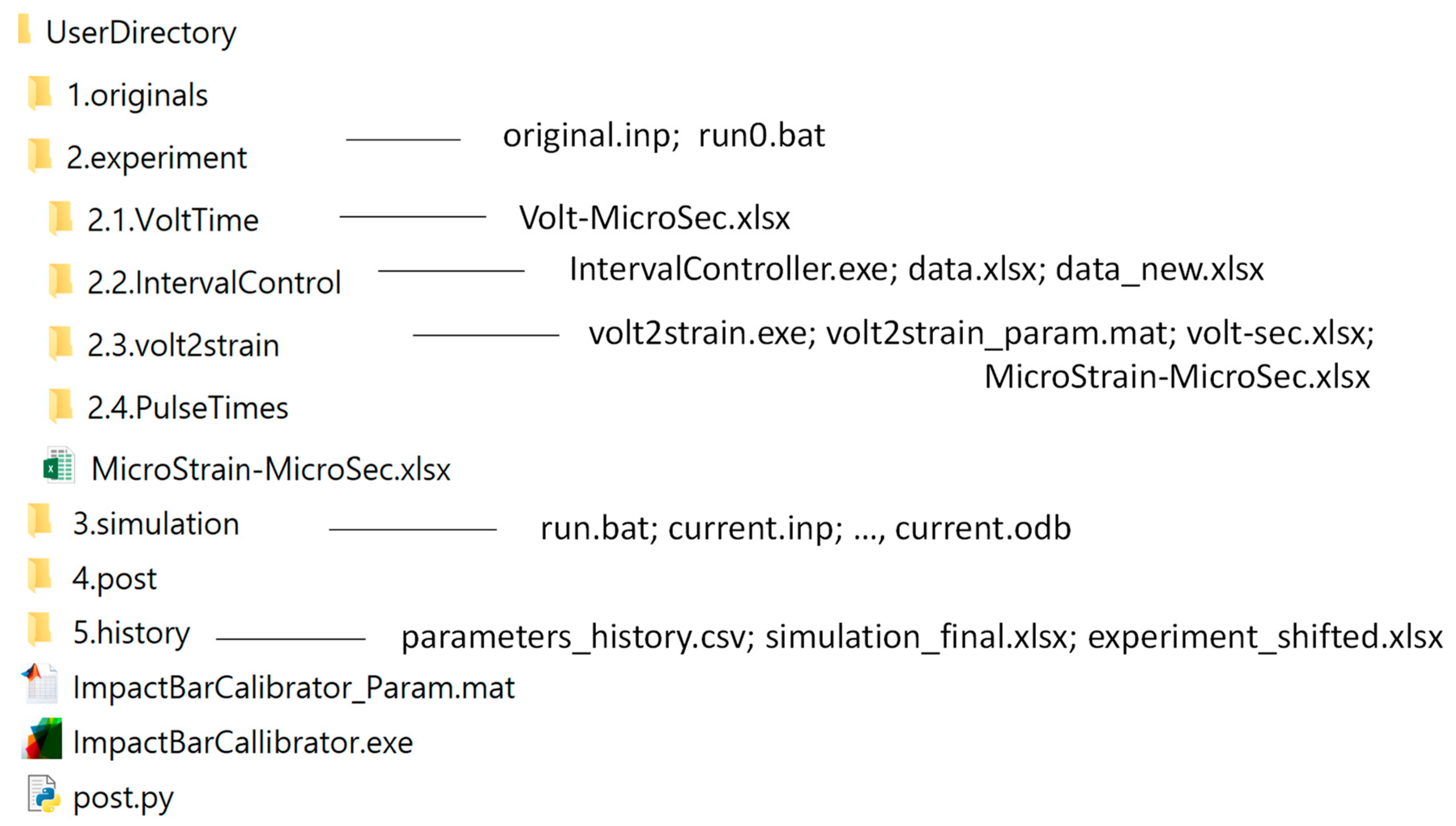
2.1. Data Structure (Directories and Files)
2.2. Roles and Relations of Files in Each Directory
2.2.1. Root Directory
2.2.2. Directory of “1.original”
2.2.3. Directory of “2.experiment”
2.2.4. Directory of “3.simulation”
2.2.5. Directory of “4.post”
2.2.6. Directory of “5.history”
2.3. Required Computer Environment for Using the Data (Reverse Engineering Tools)
3. Methods of Using the Data
3.1. Calibration Method of Bar Properties and Measured Strain
3.1.1. Overall Process
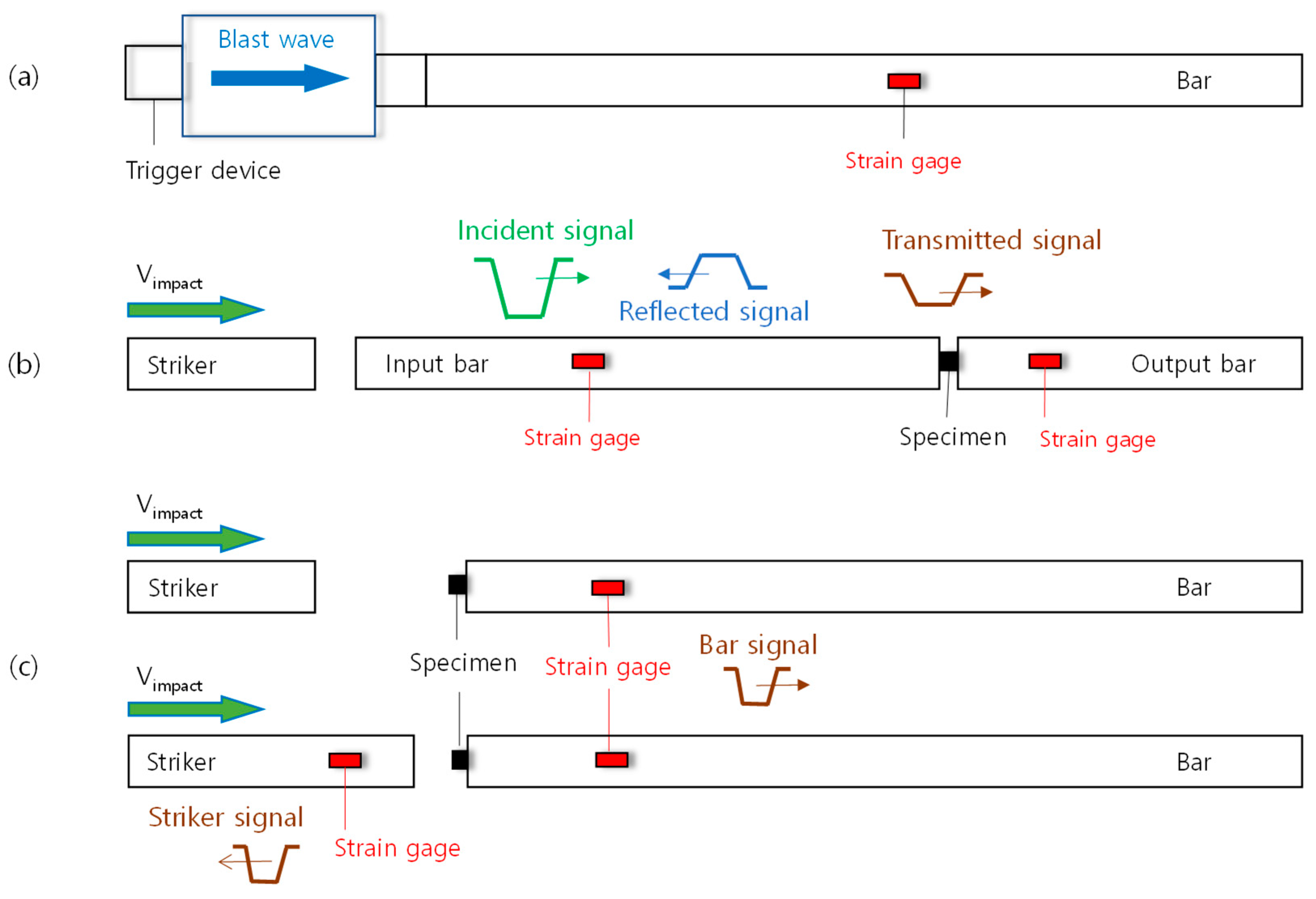
3.1.2. Bar-Alone Impact Test and Strain Measurement
3.1.3. Simulation
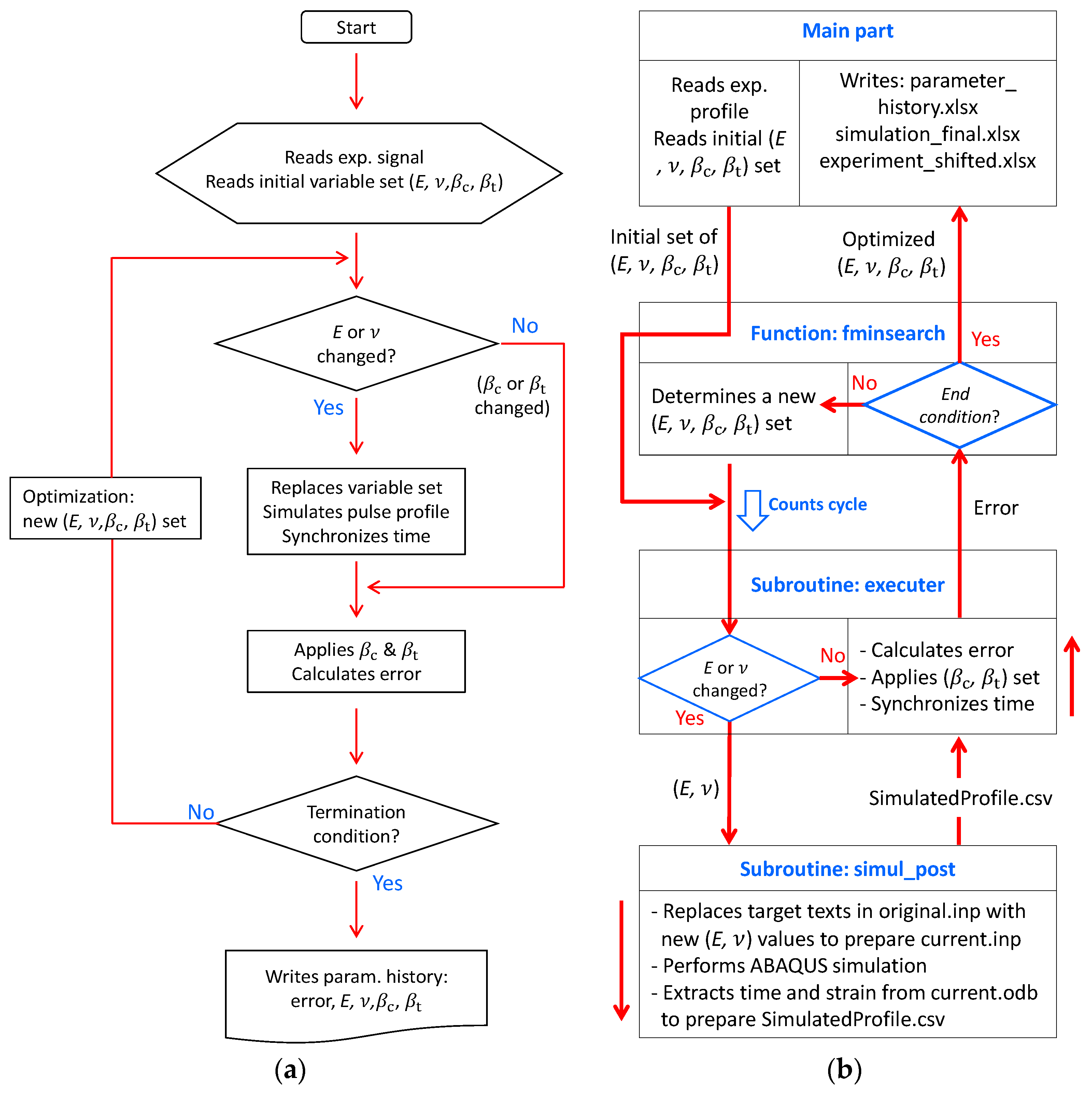
3.1.4. Reverse Engineering Algorithm
3.2. Calibration Method of Impact Velocity
3.3. Pre-Processing for Using Governing Program
3.3.1. Preparing Voltage vs. Time Profile (in Directory “2.1.VoltTime”)
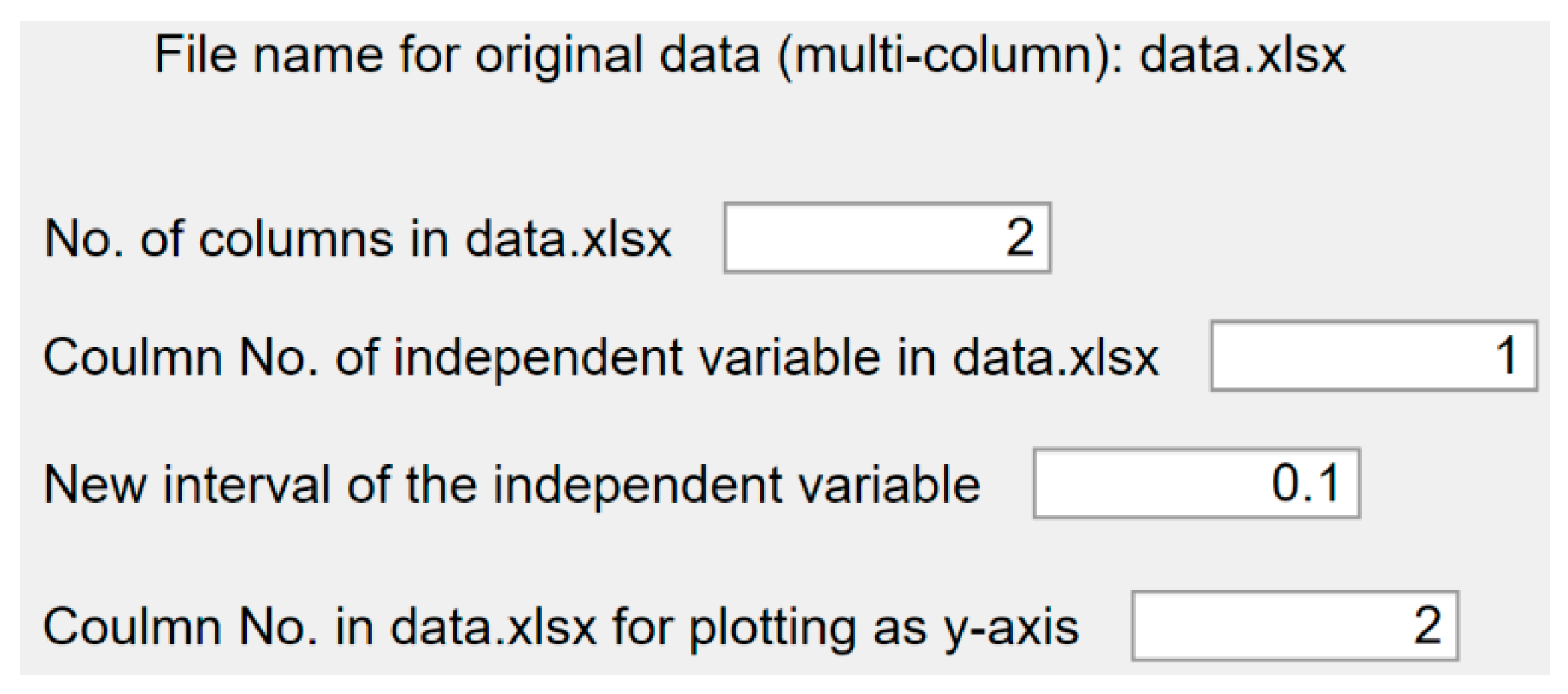
3.3.2. Interval Control of Voltage vs. Time Profile (in Directory “2.2.IntervalControl”)
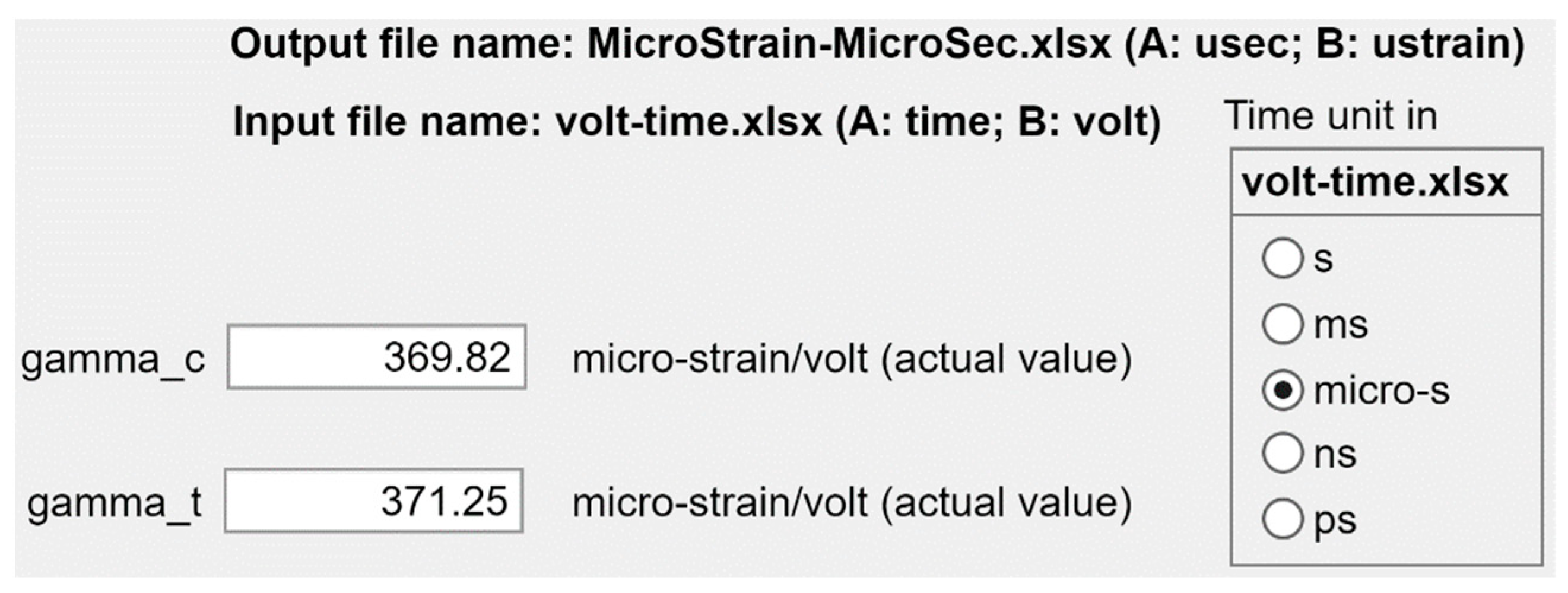
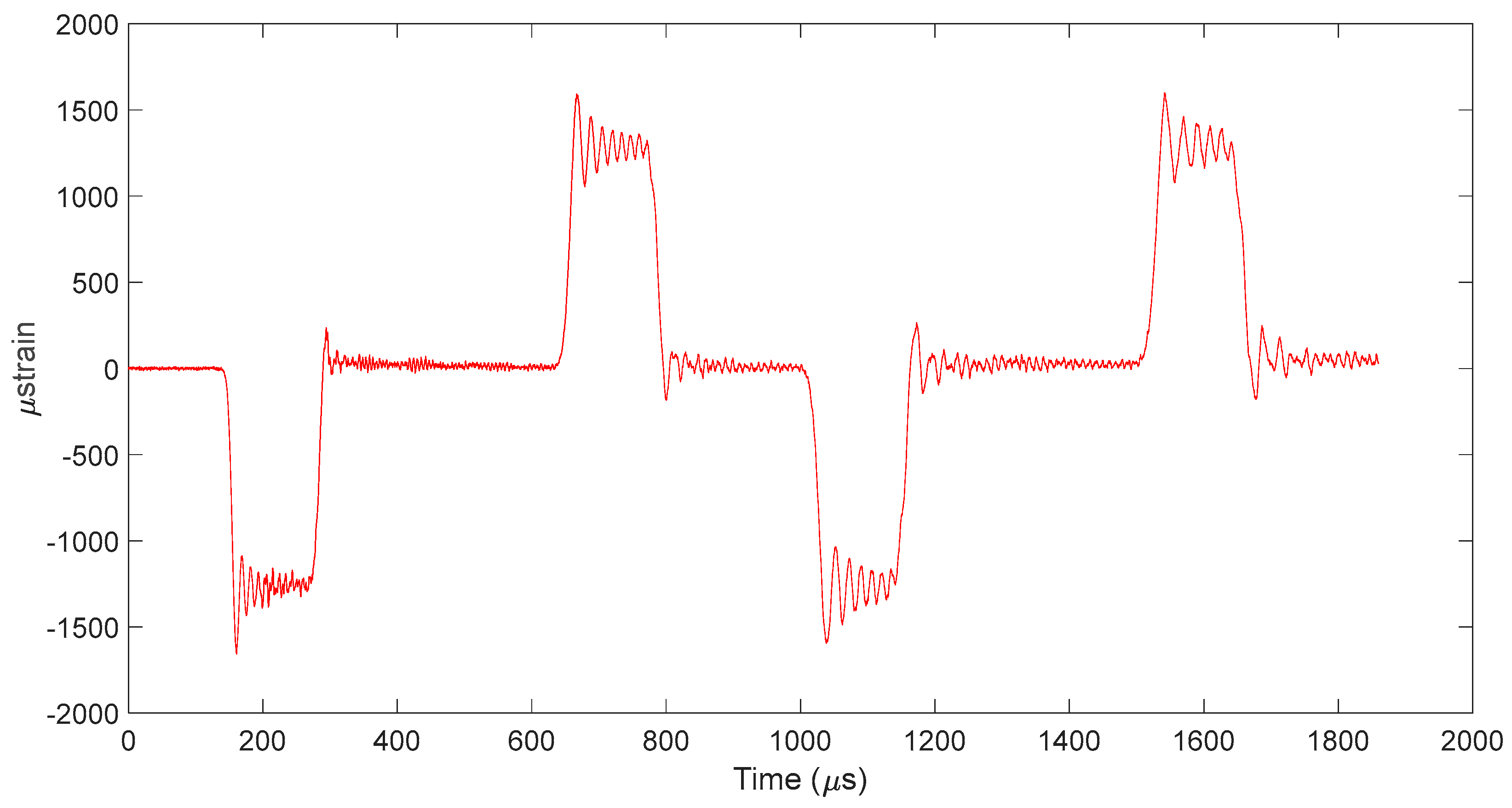
3.3.3. Preparing Strain vs. Time Profile (in Directory “2.3.volt2strain”)
3.3.4. Preparing “original.inp”
3.4. Tips for Using Governing Program
3.4.1. Load, Save, and Run
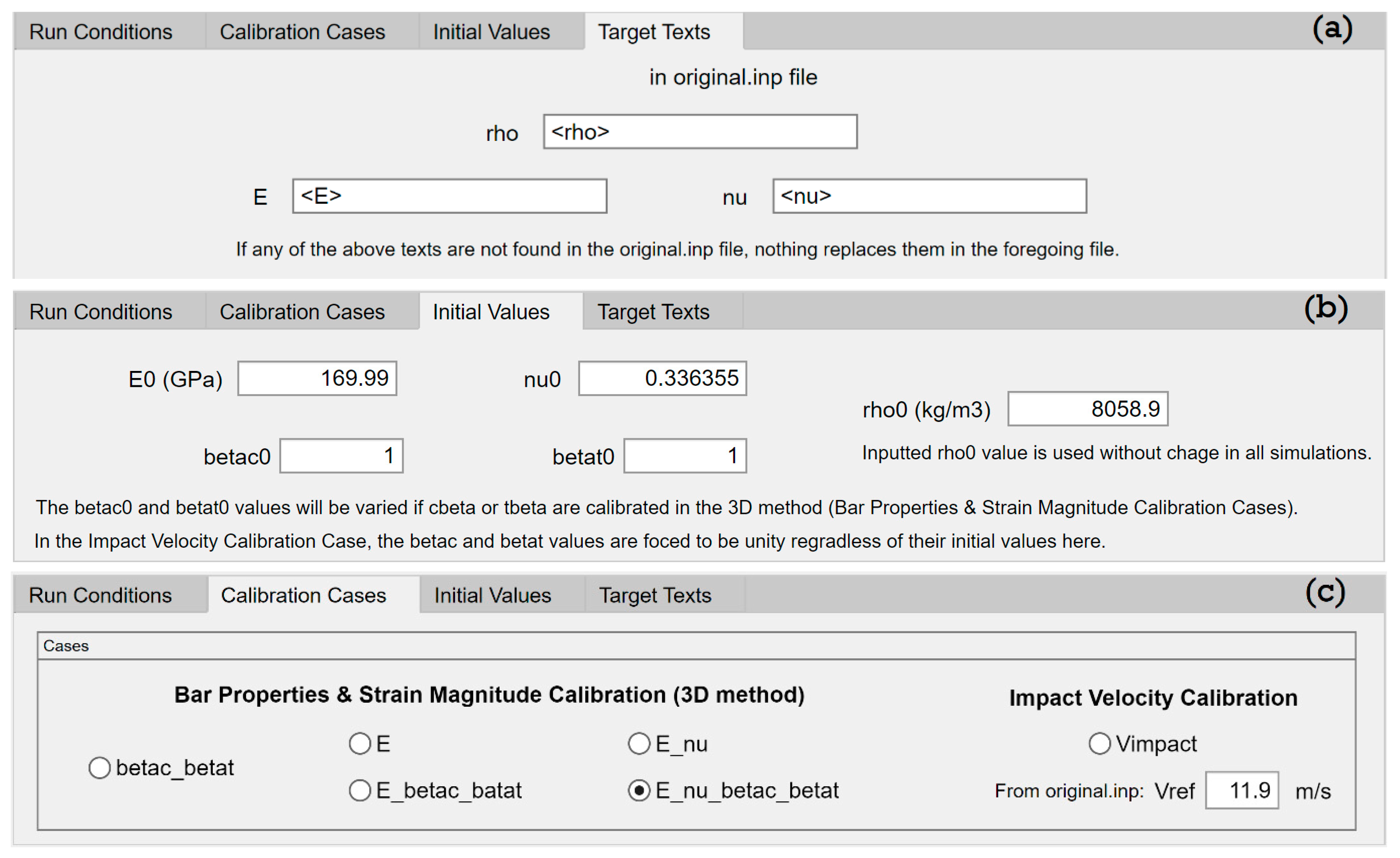
3.4.2. “Target Texts” Tab
3.4.3. “Initial Values” Tab
3.4.4. “Calibration Cases” Tab
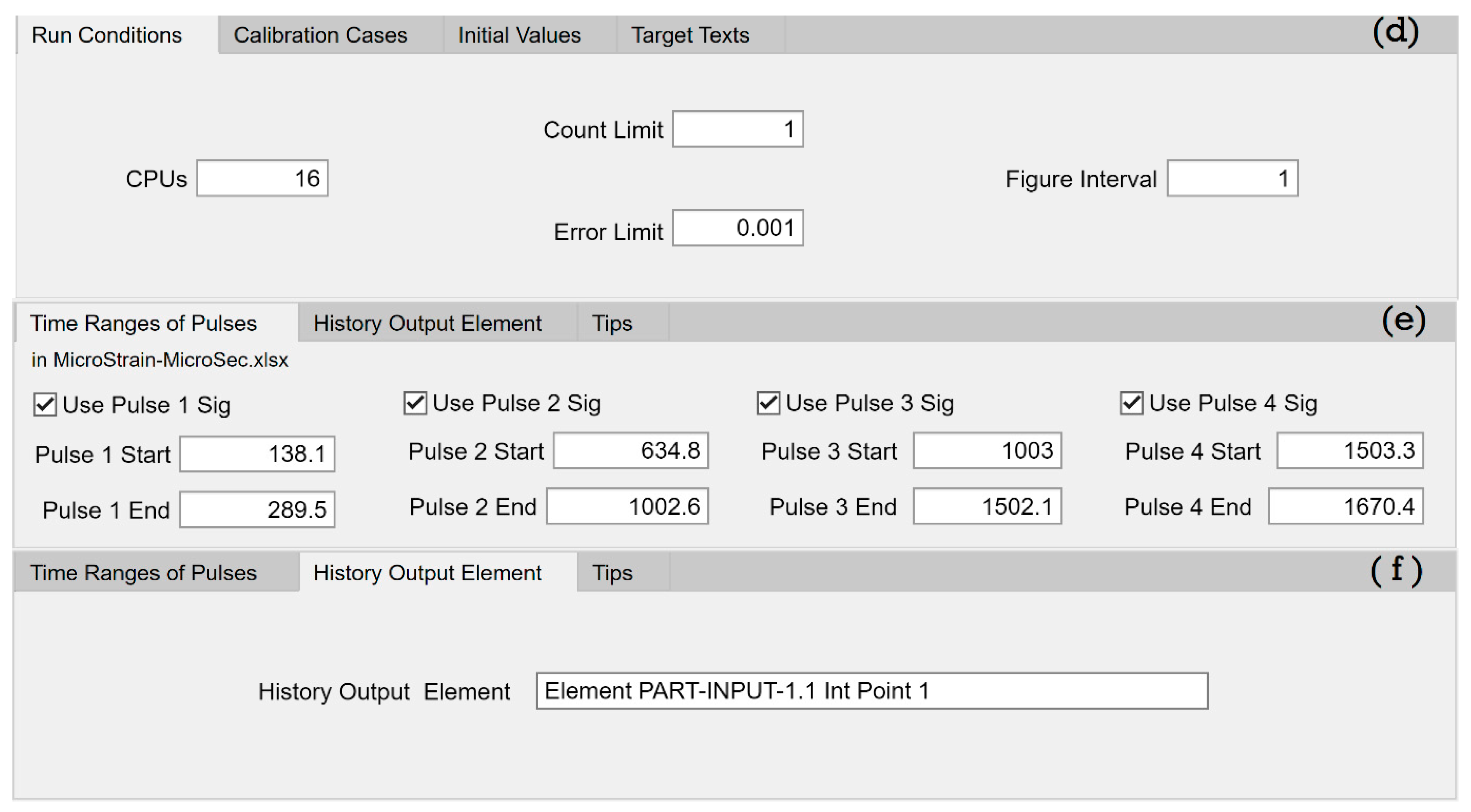
3.4.5. “Run Conditions” Tab
3.4.6. “Time Ranges of Pulses” Tab
3.4.7. “History Output Element” Tab
3.5. Calibration Result and Discussion
3.5.1. Bar Properties and Measured Strain (3D Method)
3.5.2. Impact Velocity
3.5.3. Further Discussion
4. User Notes
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| Strain magnitude correction factor (Unity). in compression and in tension | |
| One dimensional sound speed (m/s) | |
| E | Elastic modulus (Pa) |
| Measured bar strain profile (Unity) | |
| Simulated bar strain profile (Unity) | |
| Simulated bar strain profile at the reference impact velocity (m/s) | |
| Strain-per-volt ratio (strain/V). in compression and in tension | |
| Poisson’s ratio (Unity) | |
| Density (kg/m3) | |
| t | Time (s) |
| Impact velocity of striker (m/s) | |
| Reference impact velocity (m/s; its value is arbitrarily set by the user) |
References
- Hopkinson, B. A Method of measuring the pressure produced in the detonation of high explosives or by the impact of bullets. Philos. Trans. R. Soc. Lond. Ser. A 1914, 213, 437–456. [Google Scholar] [CrossRef]
- Davies, R.M. A critical study of the Hopkinson pressure bar. Philos. Trans. R. Soc. A 1948, 240, 375–457. [Google Scholar]
- Kolsky, H. An investigation of the mechanical properties of materials at very high rates of loading. Proc. Phys. Soc. Lond. Sect. B 1949, 62, 676–700. [Google Scholar] [CrossRef]
- Chen, W.; Song, B. Split Hopkinson (Kolsky) Bar—Design, Testing, and Applications; Springer Science+Business Media, LLC: New York, NY, USA, 2011. [Google Scholar]
- Othman, R. The Kolsky–Hopkinson Bar Machine; Springer International Publishing: Cham, Switzerland, 2018. [Google Scholar]
- Shin, H.; Kim, J.-B. Evolution of specimen strain rate in split Hopkinson bar test. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 4667–4687. [Google Scholar] [CrossRef] [Green Version]
- Shin, H.; Kim, D. One-dimensional analyses of striker impact on bar with different general impedance. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 589–608. [Google Scholar] [CrossRef]
- Shin, H.; Kim, S.; Kim, J.-B. Stress transfer mechanism of flange in split Hopkinson tension bar. Appl. Sci. 2020, 10, 7601. [Google Scholar] [CrossRef]
- Shin, H.; Lee, J.-H.; Kim, J.-B.; Sohn, S.-I. Design guidelines for the striker and transfer flange of a split Hopkinson tension bar and the origin of spurious waves. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2020, 234, 137–151. [Google Scholar] [CrossRef]
- Shin, H.; Kim, J.-B. Understanding the anomalously long duration time of the transmitted pulse from a soft specimen in a Kolsky bar experiment. Int. J. Precis. Eng. Manufact. 2016, 17, 203–208. [Google Scholar] [CrossRef]
- Dharan, C.K.H.; Hauser, F.E. Determination of stress-strain characteristics at very high strain rates. Exp. Mech. 1970, 10, 370–376. [Google Scholar] [CrossRef]
- Couque, H. The use of the direct impact Hopkinson pressure bar technique to describe thermally activated and viscous regimes of metallic materials. Phil. Trans. R. Soc. A 2014, 372, 20130218. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Govender, R.A.; Curry, R.J. The ‘‘open’’ Hopkinson pressure bar: Towards addressing force equilibrium in specimens with non-uniform deformation. J. Dyn. Behav. Mater. 2016, 2, 43–49. [Google Scholar] [CrossRef] [Green Version]
- Shin, H.; Ju, Y.; Choi, M.-K.; Ha, D.H. Flow stress description characteristics of some constitutive models at wide strain rates and temperatures. Technologies 2022, 10, 52. [Google Scholar] [CrossRef]
- Shin, H.; Kim, J.-B. A Phenomenological constitutive equation to describe various flow stress behaviors of materials in wide strain rate and temperature regimes. J. Eng. Mater. Technol. 2010, 132, 021009. [Google Scholar] [CrossRef]
- Lee, W.; Lee, H.-J.; Shin, H. Ricochet of a tungsten heavy alloy long-rod projectile from deformable steel plates. J. Phys. D Appl. Phys. 2002, 35, 2676–2686. [Google Scholar] [CrossRef] [Green Version]
- Shin, H.; Lee, H.-J.; Yoo, Y.-H.; Lee, W. A determination procedure for element elimination criterion in finite element analysis of high-strain-rate impact/penetration phenomena. JSME Int. J. 2004, 47, 35–41. [Google Scholar] [CrossRef] [Green Version]
- Soares, G.C.; Hokka, M. Synchronized full-field strain and temperature measurements of commercially pure titanium under tension at elevated temperatures and high strain rates. Metals 2022, 12, 25. [Google Scholar] [CrossRef]
- Shin, H. Pochhammer–Chree equation solver for dispersion correction of elastic waves in a (split) Hopkinson bar. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 80–87. [Google Scholar] [CrossRef]
- Shin, H. Sound speed and Poisson’s ratio calibration of (split) Hopkinson bar via iterative dispersion correction of elastic wave. J. Appl. Mech. 2022, 89, 061007. [Google Scholar] [CrossRef]
- Shin, H. Manual for calibrating sound speed and Poisson’s ratio of (split) Hopkinson bar via dispersion correction using Excel and Matlab templates. Data 2022, 7, 55. [Google Scholar] [CrossRef]
- Shin, H. GUI Program Governing ABAQUS Simulations of Bar Impact Test for Calibrating Bar Properties, Measured Strain, and Impact Velocity (Version 20230218). Zenodo. Available online: https://doi.org/10.5281/zenodo.7652652 (accessed on 24 February 2023).
- MathWorks®. MATLAB Runtime. Available online: https://kr.mathworks.com/products/compiler/matlab-runtime.html (accessed on 18 February 2023).
- Simuleon, Technia Company. SIMULIA Abaqus, Non-Linear Finite Element Analysis. Available online: https://www.simuleon.com/simulia-abaqus/ (accessed on 24 February 2023).
- pythonTM. Version 3.10.6. Available online: https://www.python.org/downloads/ (accessed on 24 February 2023).











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, H. Manual of GUI Program Governing ABAQUS Simulations of Bar Impact Test for Calibrating Bar Properties, Measured Strain, and Impact Velocity. Data 2023, 8, 54. https://doi.org/10.3390/data8030054
Shin H. Manual of GUI Program Governing ABAQUS Simulations of Bar Impact Test for Calibrating Bar Properties, Measured Strain, and Impact Velocity. Data. 2023; 8(3):54. https://doi.org/10.3390/data8030054
Chicago/Turabian StyleShin, Hyunho. 2023. "Manual of GUI Program Governing ABAQUS Simulations of Bar Impact Test for Calibrating Bar Properties, Measured Strain, and Impact Velocity" Data 8, no. 3: 54. https://doi.org/10.3390/data8030054