
Chinese Digital Arm (CDA): A High-Precision Digital Arm for Electrical Stimulation Simulation

Abstract
:1. Introduction
2. Data Preprocessing
2.1. Data Foundation
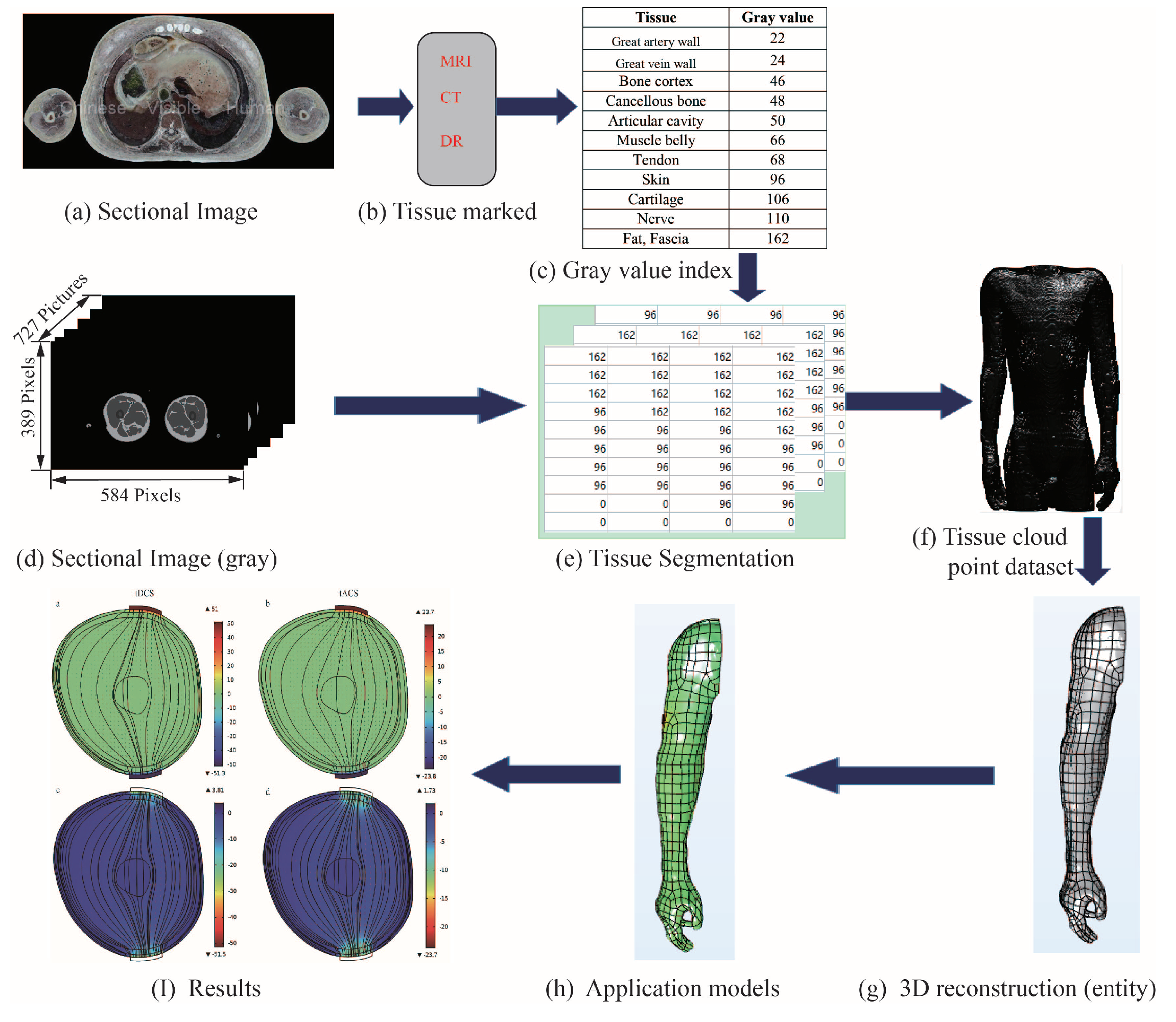
2.2. Tissue Segmentation
2.3. Reconstruction of the Geometric Entities
3. Modeling of a Finite Element Model
3.1. Electric Potential Governing Equation
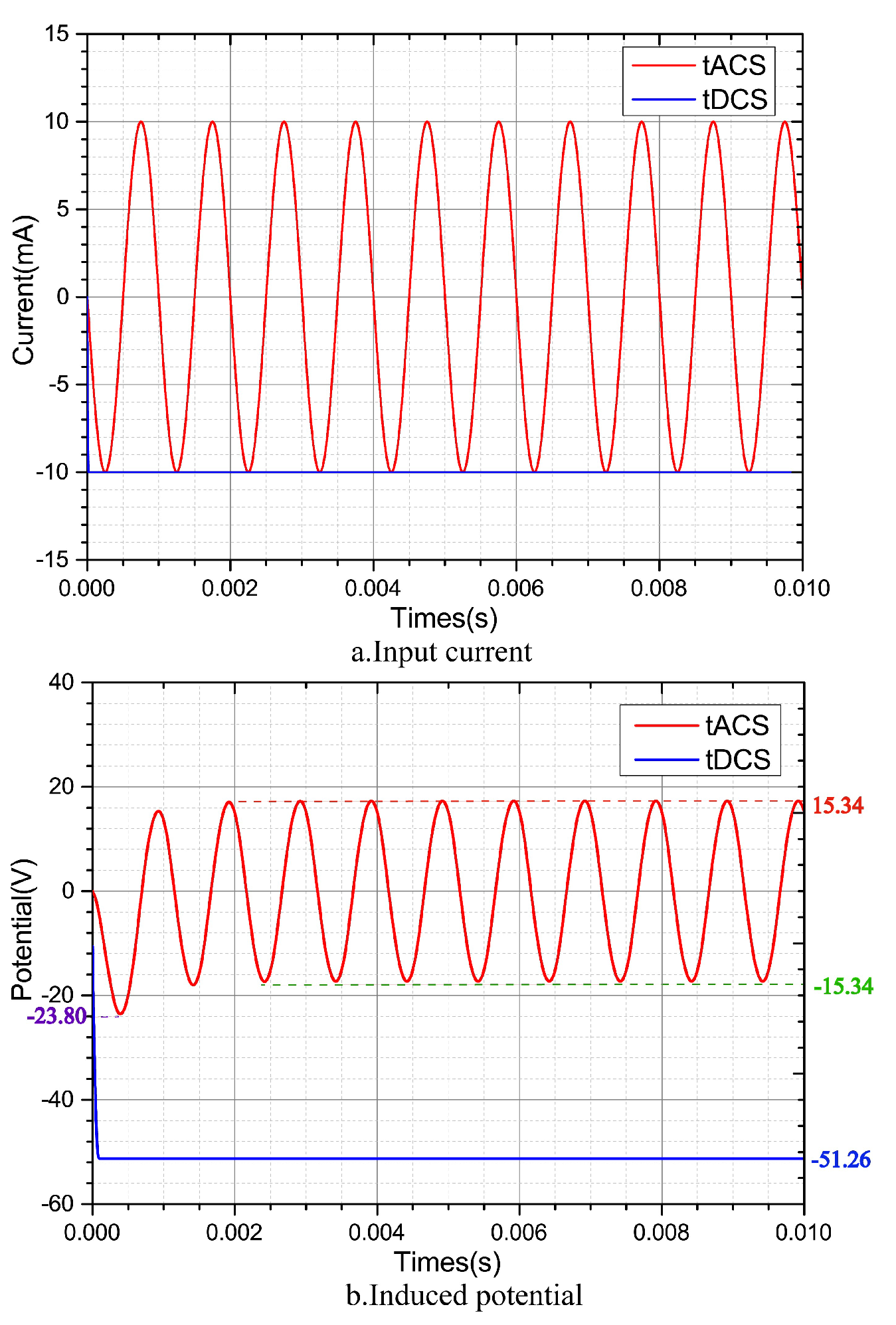
3.2. Injection Current Control
3.3. Boundary Assumption of the Surface Current
3.4. Mesh Generation
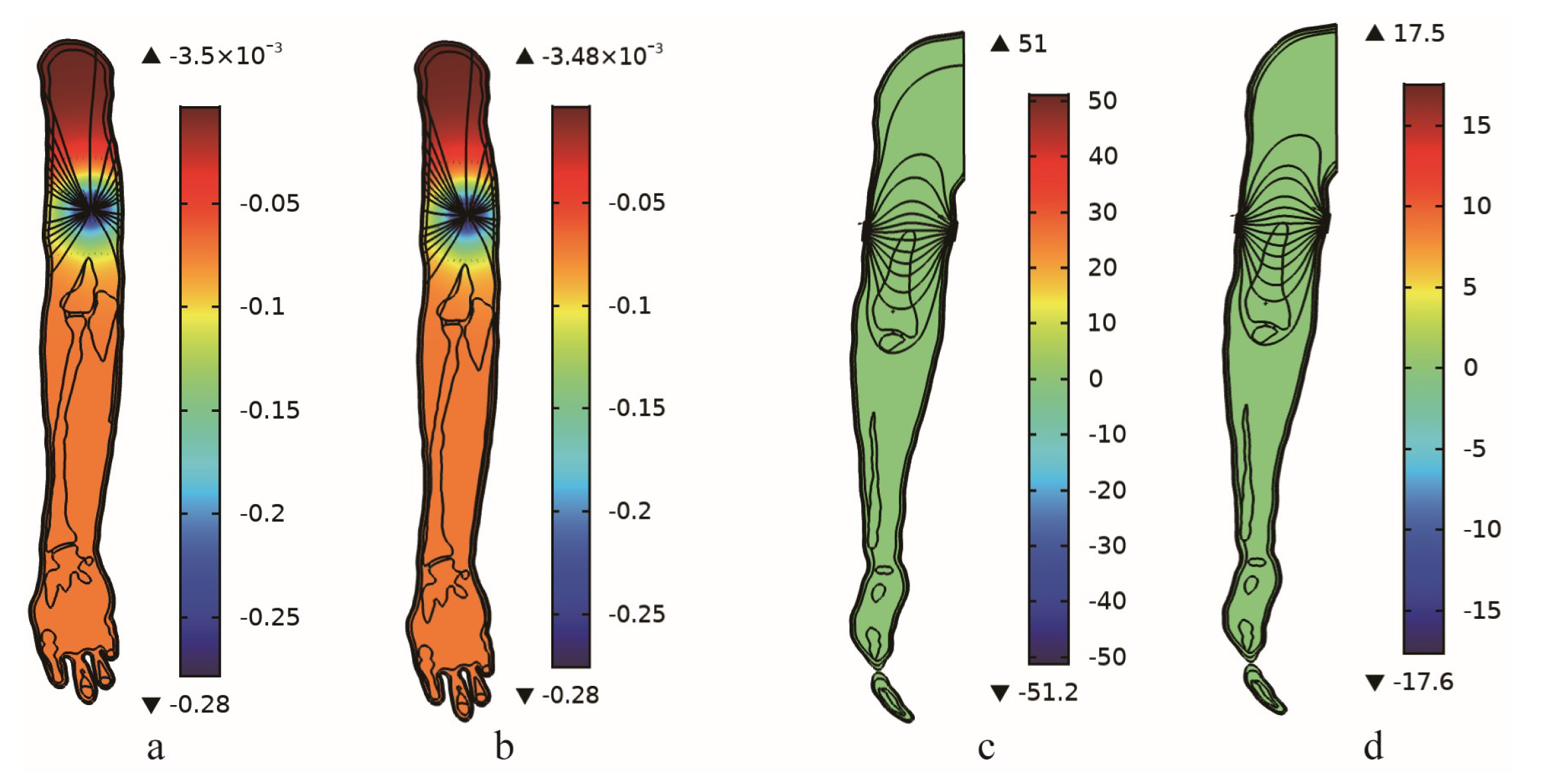
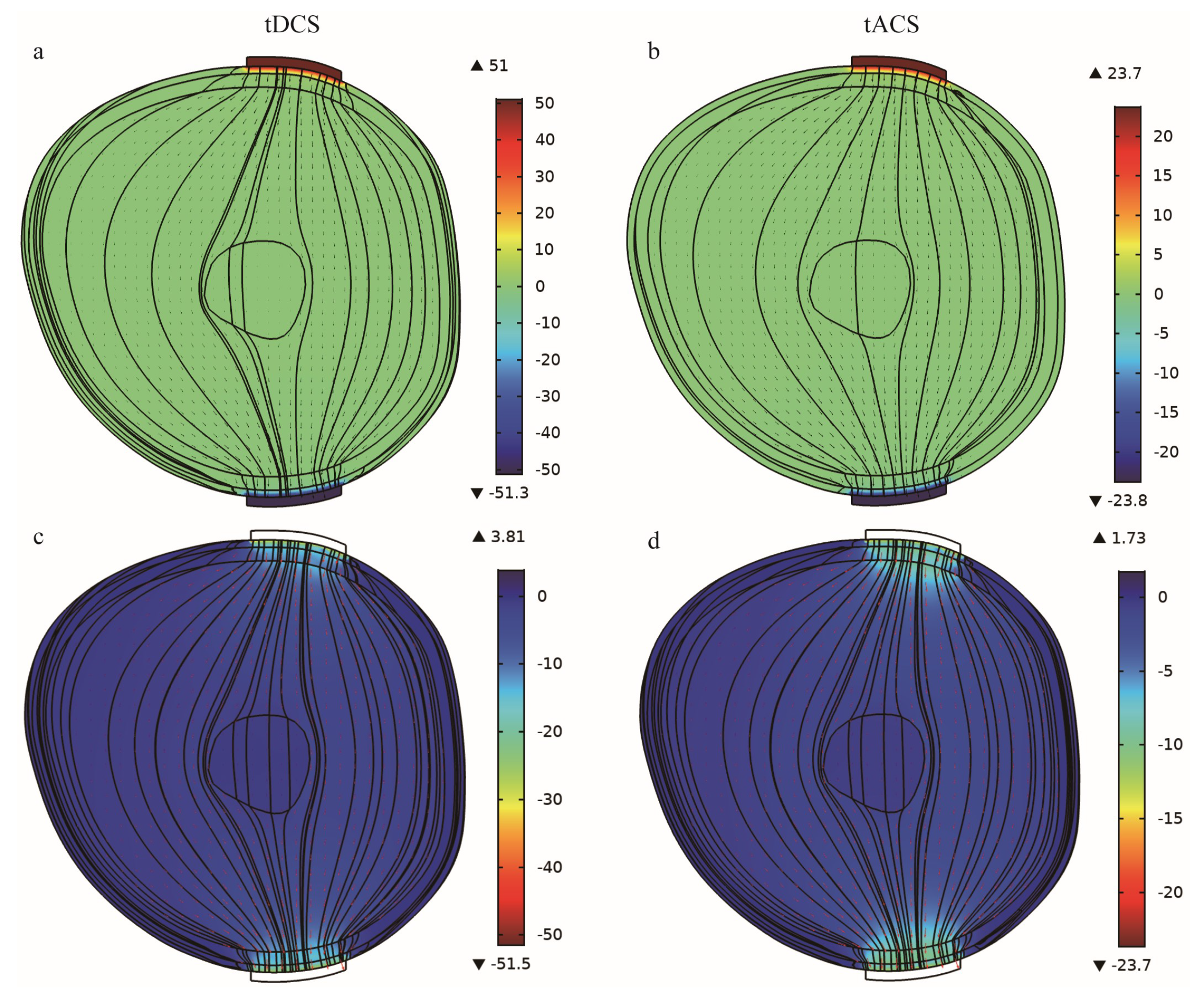
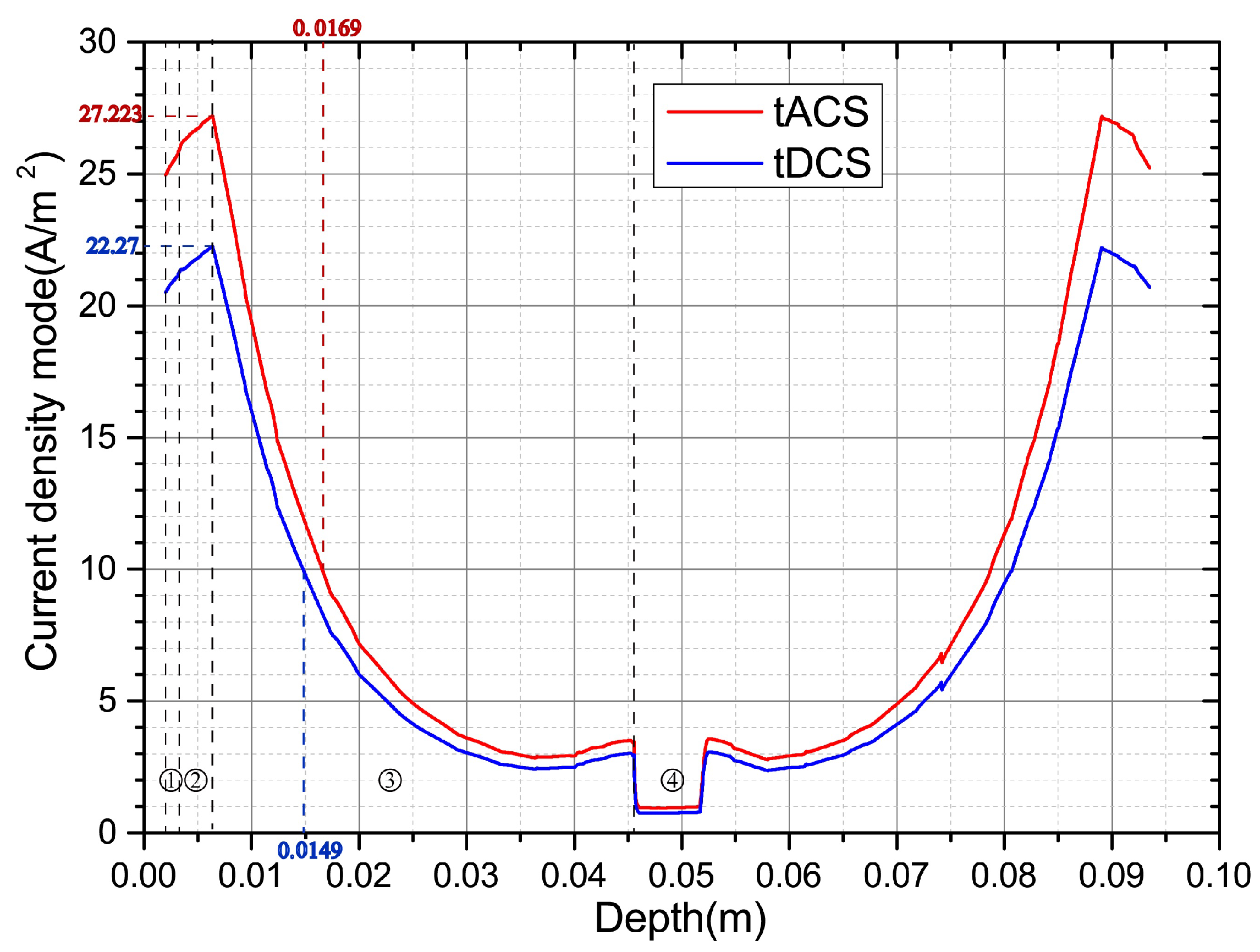
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CDA | Chinese Digital Arm |
| tDCS | transcranial Direct Current Stimulation |
| tACS | transcranial Alternating Current Stimulation |
| CVH | Chinese Visible Human |
Appendix A
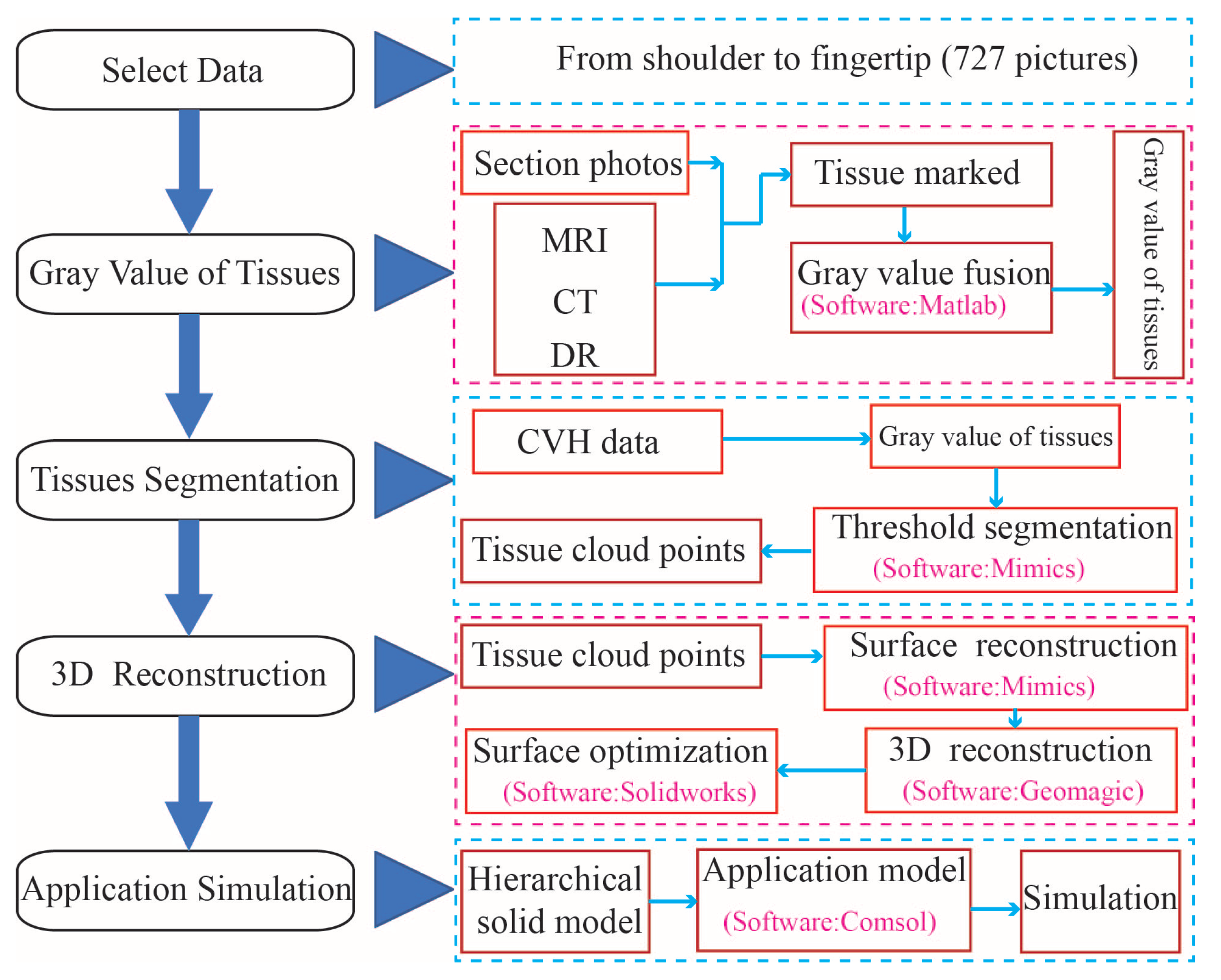
Appendix A.1. Chinese Digital Arm Production Flowchart

Appendix A.2. Image Gray Threshold

| Tissue | Gray Value | Tissue | Gray Value |
|---|---|---|---|
| Aorta wall | 22 | Muscle tendon | 68 |
| Vena cava | 24 | Skin | 96 |
| Bone cortex | 46 | Cartilage | 106 |
| Cancellous Bone | 48 | Nerve | 110 |
| Articular cavitye | 50 | Fat | 162 |
| Muscle belly | 66 |
Appendix A.3. Math Symbol Notes
| Math Symbols | Unit | Note |
|---|---|---|
| A·m | Current density | |
| Complex conductivity | ||
| (S/m) | Conductivity | |
| Relative permittivity | ||
| V | Induced potential | |
| A·m | Injected Current density | |
| S | m | Overall surface area |
| s | m | Electrode area (20 × 20 mm) |
| I | A | Injected Current |
References
- Jin, M.Y.; D’Souza, R.S.; Abd-Elsayed, A.A. Efficacy of neuromodulation interventions for the treatment of sexual dysfunction: A systematic review. Neuromodulation, 2022; in press. [Google Scholar] [CrossRef]
- Ding, D.; Zhou, D.; Sander, J.W.; Wang, W.; Li, S.; Hong, Z. Epilepsy in China: Major progress in the past two decades. Lancet Neurol. 2021, 20, 316–326. [Google Scholar] [CrossRef]
- Berry, C.D.; Happs, E.L.; Sahrakar, K.; Stevens, D.A.; Hassid, E.I.; Pappagianis, D. A New Method for the Treatment of Chronic Fungal Meningitis: Continuous Infusion into the Cerebrospinal Fluid for Coccidioidal Meningitis. Am. J. Med. Sci. 2009, 338, 79–82. [Google Scholar] [CrossRef]
- Ludvig, N.; Medveczky, G.; Rizzolo, R.; Tang, H.M.; Baptiste, S.L.; Doyle, W.K.; Devinsky, O.; Carlson, C.; French, J.A.; Kral, J.G.; et al. An implantable triple-function device for local drug delivery, cerebrospinal fluid removal and EEG recording in the cranial subdural/subarachnoid space of primates. J. Neurosci. Methods 2012, 203, 275–283. [Google Scholar] [CrossRef] [PubMed]
- Mahnama, A.; Nourbakhsh, A.; Ghorbaniasl, G. A survey on the applications of implantable micropump systems in drug delivery. Curr. Drug Deliv. 2014, 11, 123–131. [Google Scholar] [CrossRef] [PubMed]
- Kingwell, K. Epilepsy: Surgical therapy should not be considered a last resort for pharmacoresistant epilepsy. Nat. Rev. Neurol. 2012, 8, 238. [Google Scholar] [CrossRef] [PubMed]
- Abdlaty, R.; Abbass, M.A.; Awadallah, A.M. High Precision Monitoring of Radiofrequency Ablation for Liver Using Hyperspectral Imaging. Ann. Biomed. Eng. 2021, 49, 2671. [Google Scholar] [CrossRef] [PubMed]
- Jian, T.; Sun, F.; Wu, T.; Zhao, L.; Huang, X.; Wang, L.; He, Y.; Tang, D. Postoperative severe visual impairment: Surgical outcome of 165 patients with orbital tumours in the muscle cone. Eye 2020, 35, 2535–2542. [Google Scholar] [CrossRef] [PubMed]
- Kellaway, P. The part played by electric fish in the early history of bioelectricity and electrotherapy. Bull. Hist. Med. 1946, 20, 112–137. [Google Scholar]
- Beard, G.M.; Rockwell, A.D. Practical Treatise on the Medical and Surgical Uses of Electricity, 2nd ed.; Lewis: London, UK, 1875; pp. 214–318. [Google Scholar]
- Ure, A. An Account of Some Experiments Made on the Body of a Criminal Immediately after Execution, with Physiological and Practical obsercation. J. Sci. Arts 1819, 6, 283–294. [Google Scholar]
- Fritsch, G.; Hitzig, E. Ueber die elektrische Erregbarkeit des Grosshirns. Arch. Anat. Physiol. Wiss. Med. 1870, 37, 300–332. [Google Scholar]
- Bartholow, R. Experimental investigations into the functions of the human brain. Am. J. Med. Sci. 1874, 67, 305–313. [Google Scholar] [CrossRef] [Green Version]
- Sem-Jacobsen, C.W. Depth-Electrographic Observations in Psychotic Patients. Acta Psychiatr. Scand. 1959, 34, 412–416. [Google Scholar] [CrossRef]
- Moritz, C.T.; Perlmutter, S.I.; Fetz, E.E. Direct control of paralysed muscles by cortical neurons. Nature 2008, 456, 639–642. [Google Scholar] [CrossRef] [Green Version]
- Wagner, F.B.; Mignardot, J.-B.; Le Goff-Mignardot, C.G.; Demesmaeker, R.; Komi, S.; Capogrosso, M.; Rowald, A.; Seáñez, I.; Caban, M.; Pirondini, E.; et al. Targeted neurotechnology restores walking in humans with spinal cord injury. Nature 2018, 563, 65–71. [Google Scholar] [CrossRef]
- Formento, E.; Minassian, K.; Wagner, F.; Mignardot, J.B.; Le Goff-Mignardot, C.G.; Rowald, A.; Bloch, J.; Micera, S.; Capogrosso, M.; Courtine, G. Electrical spinal cord stimulation must preserve proprioception to enable locomotion in humans with spinal cord injury. Nat. Neurosci. 2018, 21, 1728–1741. [Google Scholar] [CrossRef]
- Fang, X.; Ding, H.; Liu, C.; Li, X.; Huang, Y. Optimum Design of Continuously Workable Transcranial Magnetic Stimulator. IEEE Trans. Appl. Supercond. 2020, 30, 4401306. [Google Scholar] [CrossRef]
- Fang, X.; Ding, H.; Huang, Y.; Zhou, J.; Wang, Q.; Zhao, Z. Improved Intracranial Induced Electrical Field in Transcranial Magnetic Stimulation with Semiellipse Coil Pair. IEEE Trans. Appl. Supercond. 2018, 28, 4901306. [Google Scholar] [CrossRef]
- Mosher, J.; Leahy, R.; Lewis, P. EEG and MEG: Forward solutions for inverse methods. IEEE Trans. Biomed. Eng. 1999, 46, 245–259. [Google Scholar] [CrossRef] [Green Version]
- Lalancette, M.; Quraan, M.; Cheyne, D. Evaluation of multiple-sphere head models for MEG source localization. Phys. Med. Biol. 2011, 56, 5621–5635. [Google Scholar] [CrossRef] [PubMed]
- Gosselin, M.-C.; Neufeld, E.; Moser, H.; Huber, E.; Farcito, S.; Gerber, L.; Jedensjö, M.; Hilber, I.; Di Gennaro, F.; Lloyd, B.; et al. Development of a new generation of high-resolution anatomical models for medical device evaluation: The Virtual Population 3.0. Phys. Med. Biol. 2014, 59, 5287–5303. [Google Scholar] [CrossRef] [Green Version]
- The Virtual Population. High-resolution anatomical models for computational life sciences. In Proceedings of the SPEAG AG, Flyer, EuCAP 2016, Davos, Switzerland, 10–16 April 2016; p. 2.
- Nagaoka, T.; Watanabe, S.; Sakurai, K.; Kunieda, E.; Watanabe, S.; Taki, M.; Yamanaka, Y. Development of realistic high-resolution whole-body voxel models of Japanese adult male and female of average height and weight, and application of models to radio-frequency electromagneticfield dosimetry. Phys. Med. Biol. 2004, 49, 1–15. [Google Scholar] [CrossRef]
- Lee, A.-K.; Choi, W.Y.; Chung, M.S.; Choi, H.-D.; Choi, J.-I. Development of Korean Male Body Model for Computational Dosimetry. ETRI J. 2006, 28, 107–110. [Google Scholar] [CrossRef]
- Kim, C.H.; Choi, S.H.; Jeong, J.H.; Lee, C.; Chung, M.S. HDRK-Man: A whole-body voxel model based on high-resolution color slice images of a Korean adult male cadaver. Phys. Med. Biol. 2008, 53, 4093–4106. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, A.K.; Byun, J.K.; Park, J.S.; Choi, H.D.; Yun, J. Development of 7-year-old Korean child model for computational dosimetry. ETRI J. 2009, 31, 237–239. [Google Scholar] [CrossRef]
- Yeom, Y.S.; Jeong, J.H.; Kim, C.H.; Han, M.C.; Ham, B.K.; Cho, K.W.; Hwang, S.B. HDRK-Woman: Whole-body voxel model based on high-resolution color slice images of Korean adult female cadaver. Phys. Med. Biol. 2014, 59, 3969–3984. [Google Scholar] [CrossRef]
- Dimbylow, P.J. Development of the female voxel phantom, NAOMI and its application to calculations of induced current densities and electric fields from applied low frequency magnetic and electric fields. Phys. Med. Biol. 2005, 50, 1047–1070. [Google Scholar] [CrossRef]
- Gao, J.; Munteanu, I.; Müller, W.; Weiland, T. Generation of postured voxel-based human models for the study of step voltage excited by lightning current. Adv. Radio Sci. 2011, 9, 99–105. [Google Scholar] [CrossRef]
- REMCOM, High-Fidelity Human Meshes, NMR Group at Hershey Medical Center, PennState, State College, PA, USA. Available online: http://www.remcom.com/xf7-biological-meshes/ (accessed on 12 October 2022).
- CST Studio Suite 2013, European User Conf. Available online: https://www.cst.com/content/events/downloads/euc2013/5-4-2-cst-euc.pdf (accessed on 14 July 2018).
- Massey, J.; Geyik, C.; Techachainiran, N.; Hsu, C.; Nguyen, R.; Latson, T.; Yilmaz, A.E. Austin Man and Austin woman: High fidelity, reproducible, and open-source electromagnetic voxel models. In Proceedings of the 34th Annual Meeting of the Bioelectromagnetics Society, Brisbane, Australia, 17–22 June 2012; pp. 259–261. [Google Scholar]
- Univ. Texas at Austin. Available online: http://web2.corral.tacc.utexas.edu/AustinManEMVoxels/ (accessed on 12 November 2022).
- Segars, W.P.; Sturgeon, G.; Mendonca, S.; Grimes, J.; Tsui, B.M.W. 4D XCAT phantom for multimodality imaging research. Med. Phys. 2010, 37, 4902–4915. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Segars, W.P.; Bond, J.; Frush, J.; Hon, S.; Eckersley, C.; Williams, C.H.; Feng, J.; Tward, D.J.; Ratnanather, J.T.; Miller, M.I.; et al. Population of anatomically variable 4D XCAT adult phantoms for imaging research and optimization. Med. Phys. 2013, 40, 043701. [Google Scholar] [CrossRef] [Green Version]
- Segars, W.P.; Norris, H.; Sturgeon, G.M.; Zhang, Y.; Bond, J.; Minhas, A.; Samei, E.; Tward, D.J.; Ratnanather, J.T.; Miller, M.I. The development of a population of 4D pediatric XCAT phantoms for imaging research and optimization. Med. Phys. 2015, 42, 4179–4226. [Google Scholar] [CrossRef] [Green Version]
- Konik, A.; Connolly, C.M.; Johnson, K.L.; Dasari, P.; Segars, P.W.; Pretorius, P.H.; King, M.A. Digital anthropomorphic phantoms of non-rigid human respiratory and voluntary body motion for investigating motion correction in emission imaging. Phys. Med. Biol. 2014, 59, 3669–3682. [Google Scholar] [CrossRef] [Green Version]
- Wu, T.; Tan, L.; Shao, Q.; Zhang, C.; Zhao, C.; Li, Y.; Conil, E.; Hadjem, A.; Wiart, J.; Lu, B.; et al. Chinese adult anatomical models and the application in evaluation of RF exposures. Phys. Med. Biol. 2011, 56, 2075–2089. [Google Scholar] [CrossRef]
- Li, A.; Liu, Q.; Zeng, S.; Tang, L.; Zhong, S.; Luo, Q. Construction and visualization of high-resolution 3D anatomical structure datasets for Chinese digital human. Chin. Sci. Bull. 2008, 53, 1848–1854. [Google Scholar]
- Yu, D.; Wang, M.; Liu, Q. Development of Chinese reference man deformable surface phantom and its application to the influence of physique on electromagnetic dosimetry. Phys. Med. Biol. 2015, 60, 6833–6846. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.-X.; Heng, P.A.; Liu, Z.-J.; Tan, L.-W.; Qiu, M.-G.; Li, Q.-Y.; Liao, R.-X.; Li, K.; Cui, G.-Y.; Guo, Y.-L.; et al. The Chinese Visible Human (CVH) datasets incorporate technical and imaging advances on earlier digital humans. J. Anat. 2004, 204, 165–173. [Google Scholar] [CrossRef] [PubMed]
- Zhang, S.-X.; Heng, P.-A.; Liu, Z.-J. Chinese visible human project. Clin. Anat. 2006, 19, 204–215. [Google Scholar] [CrossRef]
- Wegmueller, M.S. Intra-body communication for biomedical sensor networks. Ph.D. Thesis, Swiss Federal Institude of Technology Zurich (ETH), Zurich, Switzerland, 2007. [Google Scholar]
- Song, Y.; Zhang, K.; Hao, Q.; Hu, L.X.; Wang, J.W.; Shang, F.Z. A finite-element simulation of galvanic coupling intra-body communication based on the whole human body. Sensors 2012, 12, 13567–13582. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wei, Z.; Gao, Y.; Chen, Z.; Pun, S.H.; Vai, M.I.; Du, M. A Visible Human Data-Based Whole-Body Model for Investigating the Transmission Attenuation of Intrabody Communication. IEEE Trans. Microw. Theory Tech. 2022, 70, 1–11. [Google Scholar] [CrossRef]
- Hyeon, S.; Hyoung-Ihl, K.; Chan, J.S. The Effect of a Transcranial Channel as a Skull/Brain Interface in High-Definition Transcranial Direct Current Stimulation-A Computational Study. Sci. Rep. 2017, 7, 40612. [Google Scholar]
- Grossman, N.; Bono, D.; Dedic, N.; Kodandaramaiah, S.B.; Rudenko, A.; Suk, H.-J.; Cassara, A.M.; Neufeld, E.; Kuster, N.; Tsai, L.-H.; et al. Noninvasive Deep Brain Stimulation via Temporally Interfering Electric Fields. Cell 2017, 169, 1029–1041.e16. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Boateng, A.; Ahmad, K.; Myles, M.L. tACS motor system effects can be caused by transcutaneous stimulation of peripheral nerves. Nat. Commun. 2019, 10, 266. [Google Scholar]
- Gabriel, C.; Gabriel, S.; Corthout, E. The dielectric properties of biological tissues: I. Literature survey. Phys. Med. Biol. 1996, 41, 2231. [Google Scholar] [CrossRef] [Green Version]
- Gabriel, S.; Lau, R.W.; Gabriel, C. The dielectric properties of biological tissues: II. Measurements in the frequency range 10 Hz to 20 GHz. Phys. Med. Biol. 1996, 41, 2251. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Plonsey, R.; Heppner, E.B. Considerations of quasi-stationarity in electrophysiological systems. Bull. Math. Biophys. 1967, 29, 657–664. [Google Scholar] [CrossRef]
- Zhang, S.; Pun, S.H.; Mak, P.U.; Qin, Y.P.; Liu, Y.H.; Gao, Y.M.; Vai, M.I. Experimental Verifications of Low Frequency Path Gain Channel Modeling for Implantable Medical Device (IMD). IEEE Access 2019, 1, 11934–11945. [Google Scholar] [CrossRef]
- Zhang, S.; Liu, Y.H.; Qin, Y.P.; Kuang, J.M.; Yang, J.N.; Li, J.W.; Zou, X.M. Experimental Verification of Human-limb Channel Modeling for Muscular-Tissue Characteristics. IEEE Access 2019, 9, 122769–122783. [Google Scholar] [CrossRef]
- Pun, S.H.; Gao, Y.M.; Mak, P.U.; Vai, M.I.; Du, M. Quasi-static modeling of human limb for intra-body communications with experiments. IEEE Trans. Inf. Technol. Biomed. 2011, 15, 870–876. [Google Scholar]
- Choudhari, P.; Panse, M. Finite Element Modeling and Simulation of Arteries in the Human Arm to Study the Aortic Pulse Wave Propagation. Procedia Comput. Sci. 2016, 93, 721–727. [Google Scholar] [CrossRef] [Green Version]
- Pu, B.; Li, K.; Li, S.L.; Zhu, N.B. Automatic Fetal Ultrasound Standard Plane Recognition Based on Deep Learning and IIoT. IEEE Trans. Ind. Informatics 2021, 17, 7771–7780. [Google Scholar] [CrossRef]
- Lee, D.-H.; Li, Y.; Shin, B.-S. Generalization of intensity distribution of medical images using GANs. Hum.-Centric Comput. Inf. Sci. 2020, 10, 1–15. [Google Scholar] [CrossRef]
- Song, Y.; Zhang, D.; Tang, Q.; Tang, S.; Yang, K. Local and nonlocal constraints for compressed sensing video and multi-view image recovery. Neurocomputing 2020, 406, 34–48. [Google Scholar] [CrossRef]
- Long, M.; Peng, F.; Zhu, Y. Identifying natural images and computer generated graphics based on binary similarity measures of PRNU. Multimedia Tools Appl. 2017, 78, 489–506. [Google Scholar] [CrossRef]
- Wang, J.; Yang, Y.; Wang, T.; Sherratt, R.; Zhang, J. Big Data Service Architecture: A Survey. J. Internet Technol. 2020, 21, 393–405. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
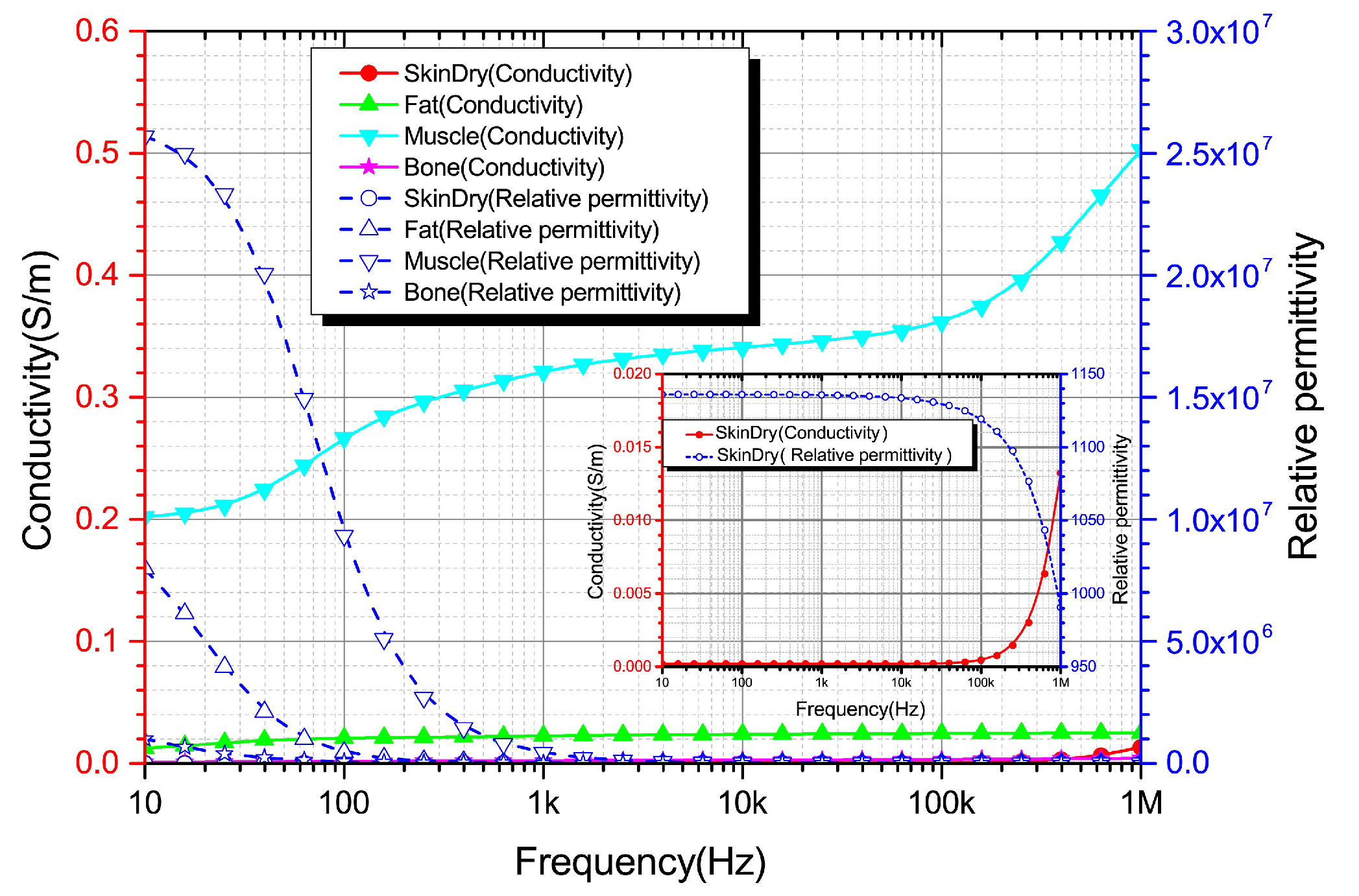
| Tissue | Frequency | Conductivity | Relative |
|---|---|---|---|
| (Hz) | (S/m) | Permittivity | |
| 1 k | 2.00 × | 1.14 × | |
| Skin | 10 k | 2.04 × | 1.13 × |
| 100 k | 4.51 × | 1.12 × | |
| 1 M | 1.32 × | 9.91 × | |
| 1 k | 2.24 × | 2.41 × | |
| Fat | 10 k | 2.38 × | 1.09 × |
| 100 k | 2.44 × | 9.29 × 10 | |
| 1 M | 2.51 × | 2.72 × 10 | |
| 1 k | 3.20 × | 4.30 × | |
| Muscle | 10 k | 3.40 × | 2.60 × |
| 100 k | 3.60 × | 8.10 × | |
| 1 M | 5.00 × | 1.80 × | |
| 1 k | 2.02 × | 2.70 × | |
| Skeleton | 10 k | 2.04 × | 5.22 × |
| 100 k | 2.08 × | 2.27 × | |
| 1 M | 2.44 × | 1.45 × |
| Parameter Type | Mesh Setting | Mesh Parameters | |||
|---|---|---|---|---|---|
| Sequence | Cell | Domain | Boundary | Edge | |
| Type | Size | Cell | Element | Cell | |
| Parameter | User control mesh | More refined | 893,031 | 213,151 | 36,774 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Wang, J.; Yu, Y.; Wu, L.; Zhang, T. Chinese Digital Arm (CDA): A High-Precision Digital Arm for Electrical Stimulation Simulation. Bioengineering 2023, 10, 374. https://doi.org/10.3390/bioengineering10030374
Zhang S, Wang J, Yu Y, Wu L, Zhang T. Chinese Digital Arm (CDA): A High-Precision Digital Arm for Electrical Stimulation Simulation. Bioengineering. 2023; 10(3):374. https://doi.org/10.3390/bioengineering10030374
Chicago/Turabian StyleZhang, Shuang, Jiujiang Wang, Yuanyu Yu, Lin Wu, and Tao Zhang. 2023. "Chinese Digital Arm (CDA): A High-Precision Digital Arm for Electrical Stimulation Simulation" Bioengineering 10, no. 3: 374. https://doi.org/10.3390/bioengineering10030374