
Optimization Design of the Inner Structure for a Bioinspired Heel Pad with Distinct Cushioning Property
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
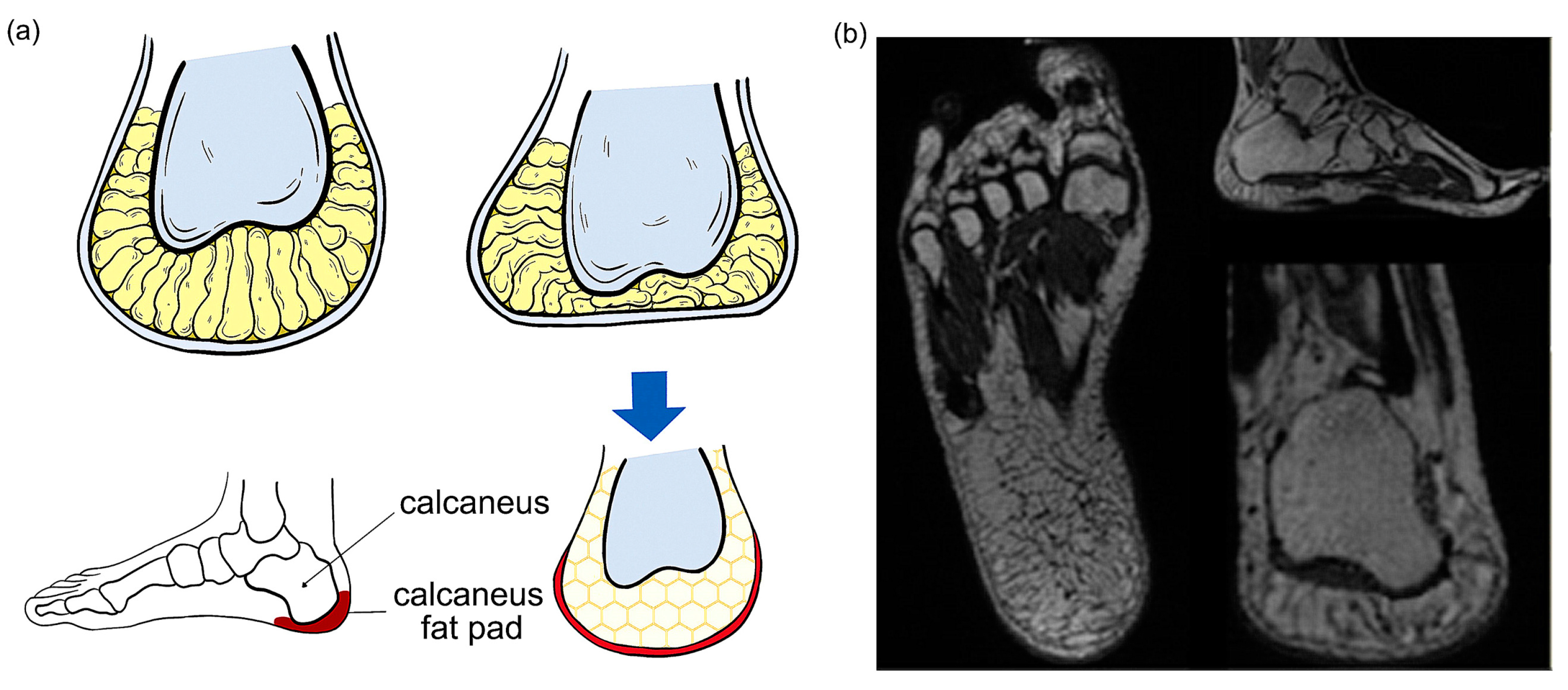
2.1. Medical Imaging of Human Heel Pad
2.2. Structure Design of Bionic Heel Pads
2.3. Finite Element (FE) Simulation
2.4. Material Selection and Prototype Manufacturing
2.5. Human Walking Tests
2.6. Statistical Analysis
3. Results
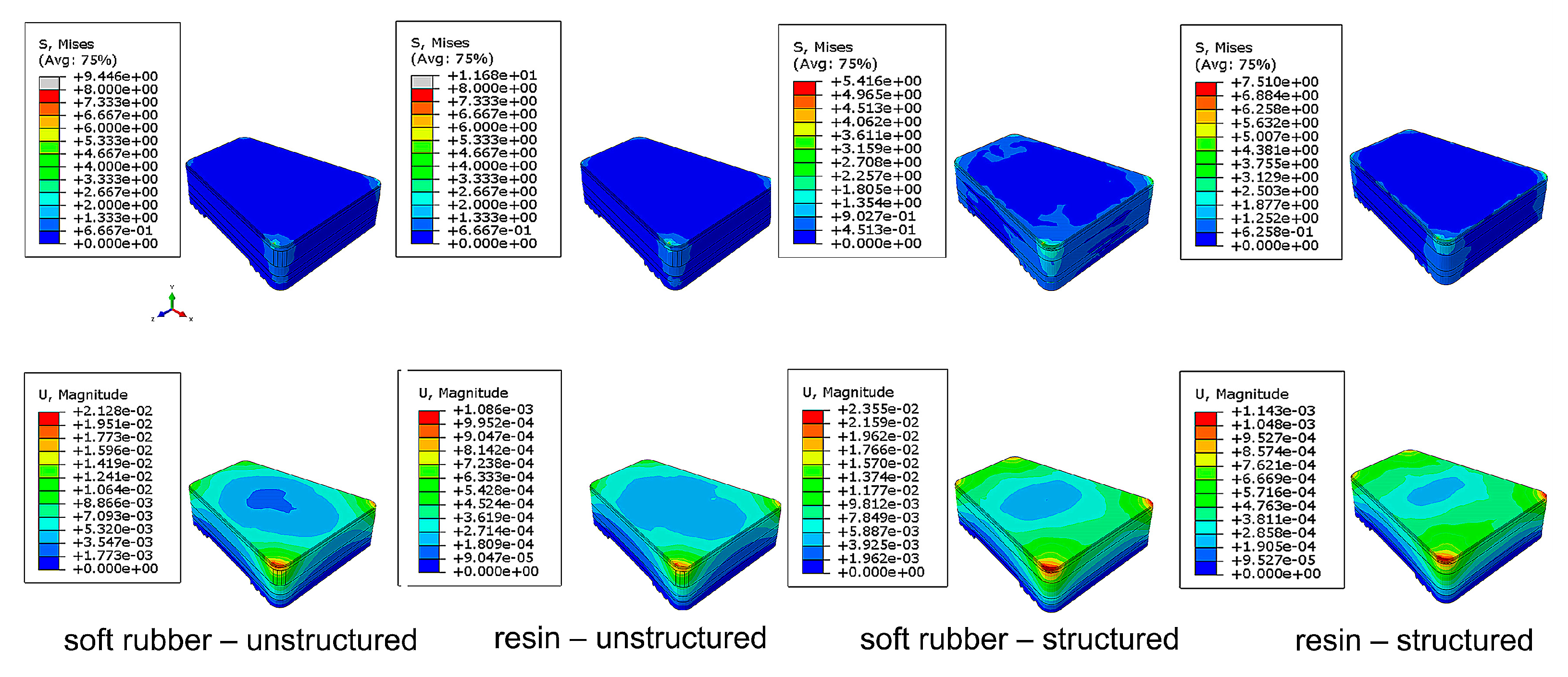
3.1. FE Static Analysis
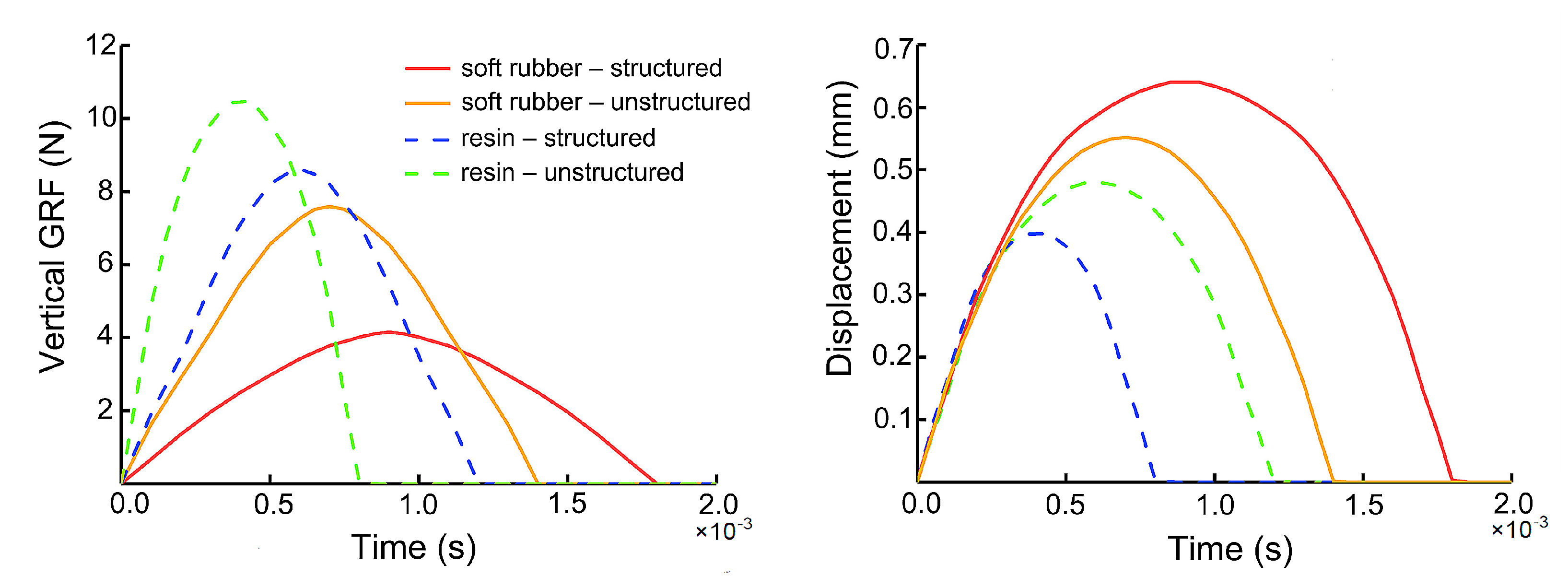
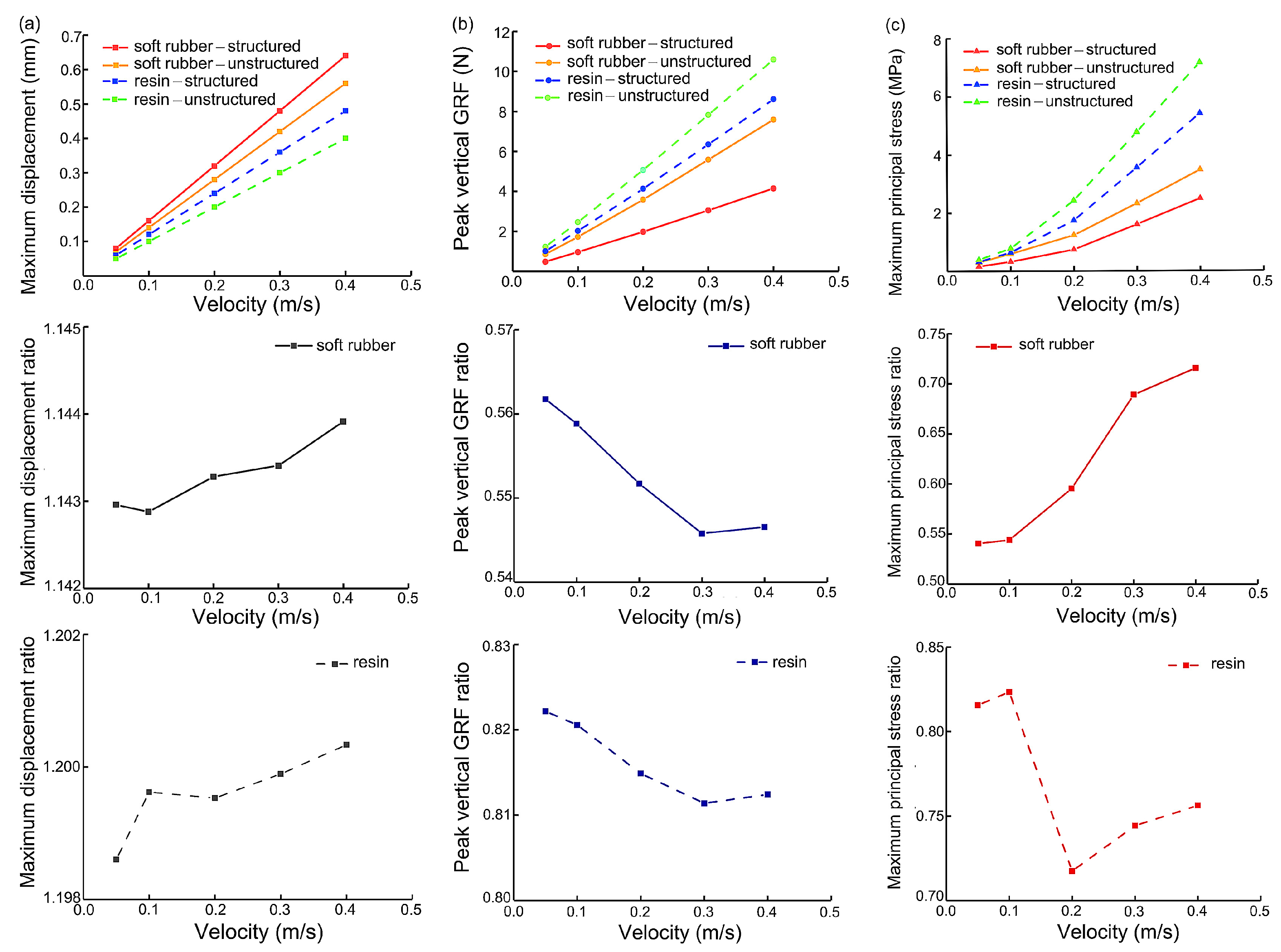
3.2. FE Impact Analysis with Different Speeds
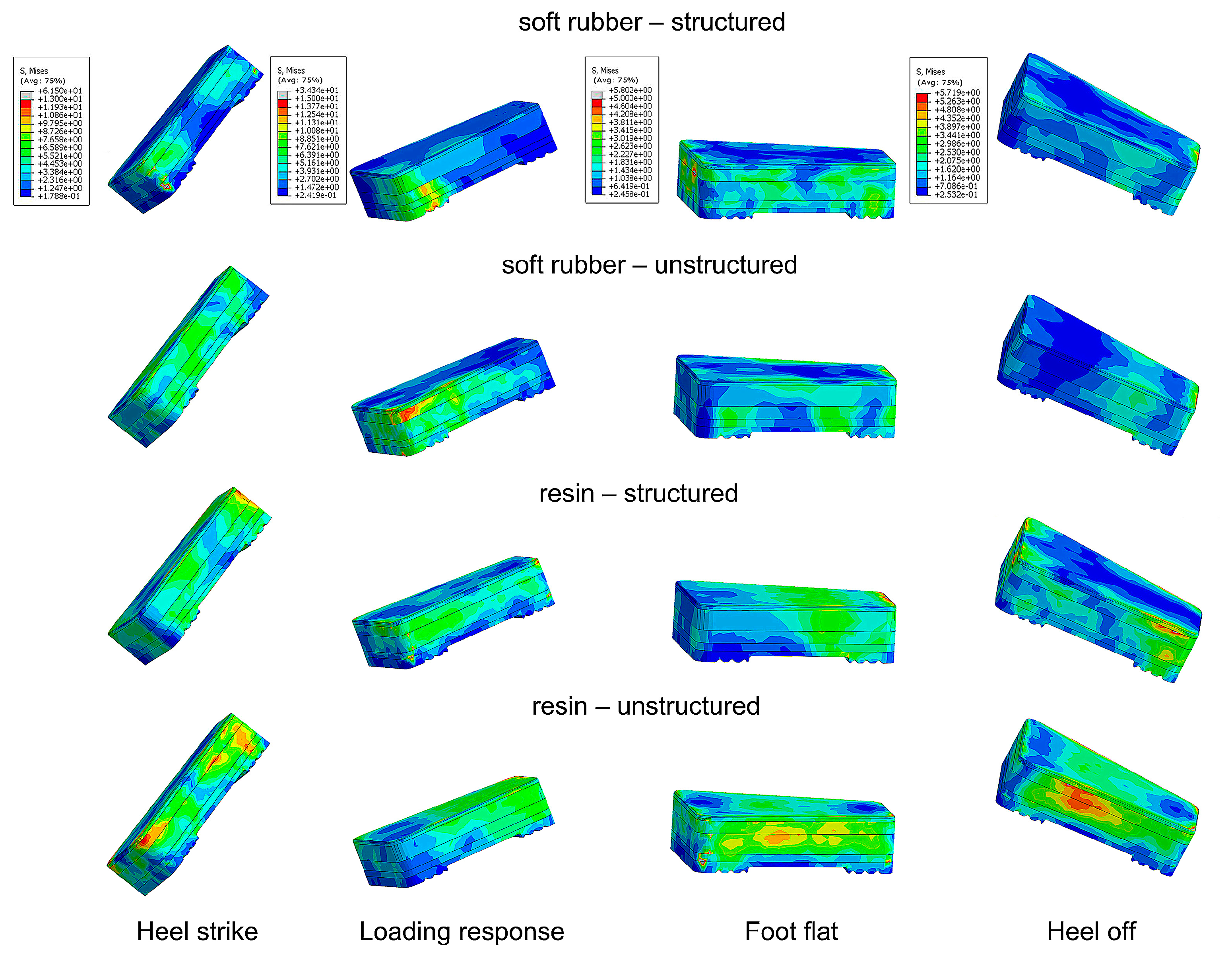
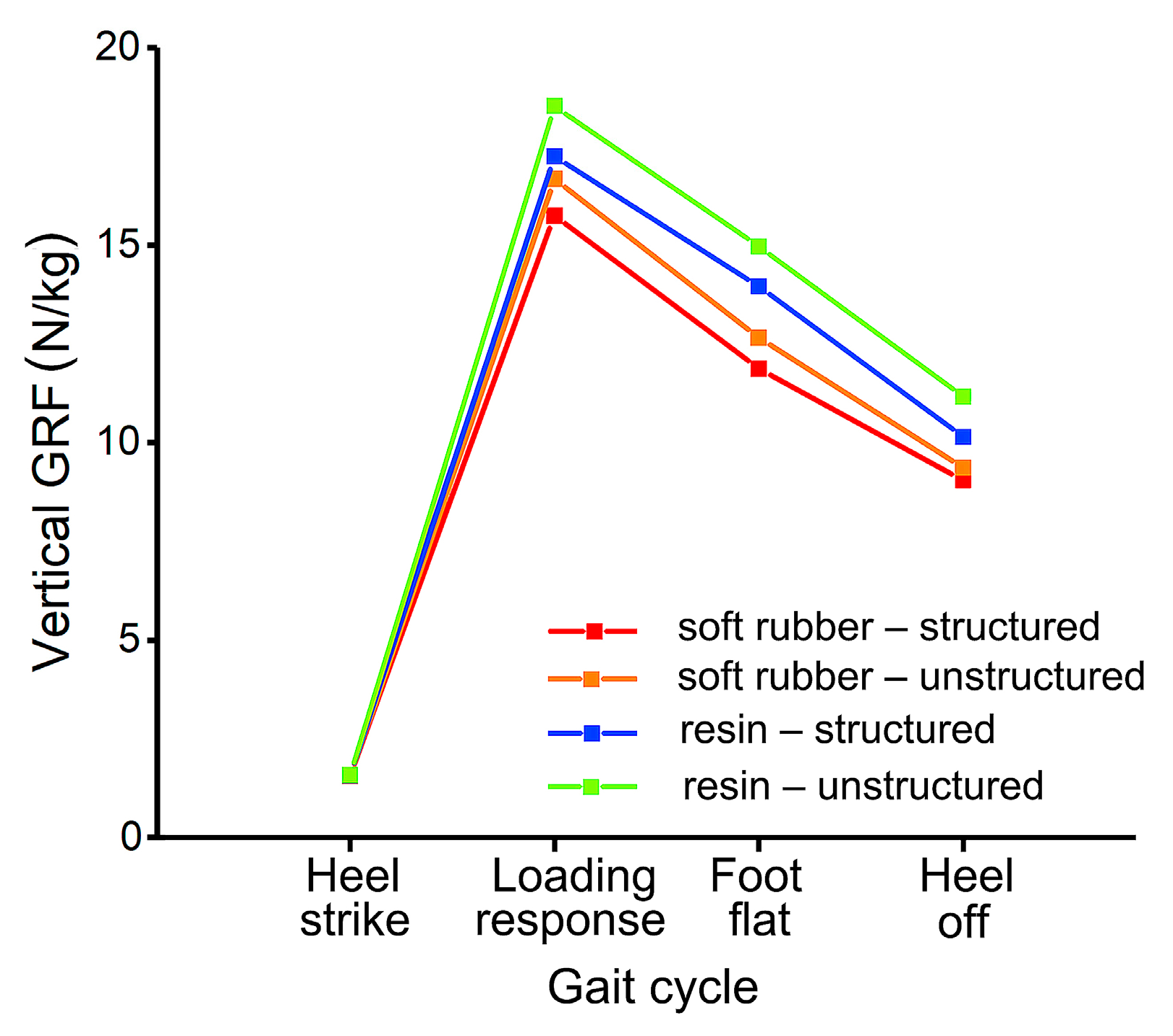
3.3. FE Walking Gait Analysis
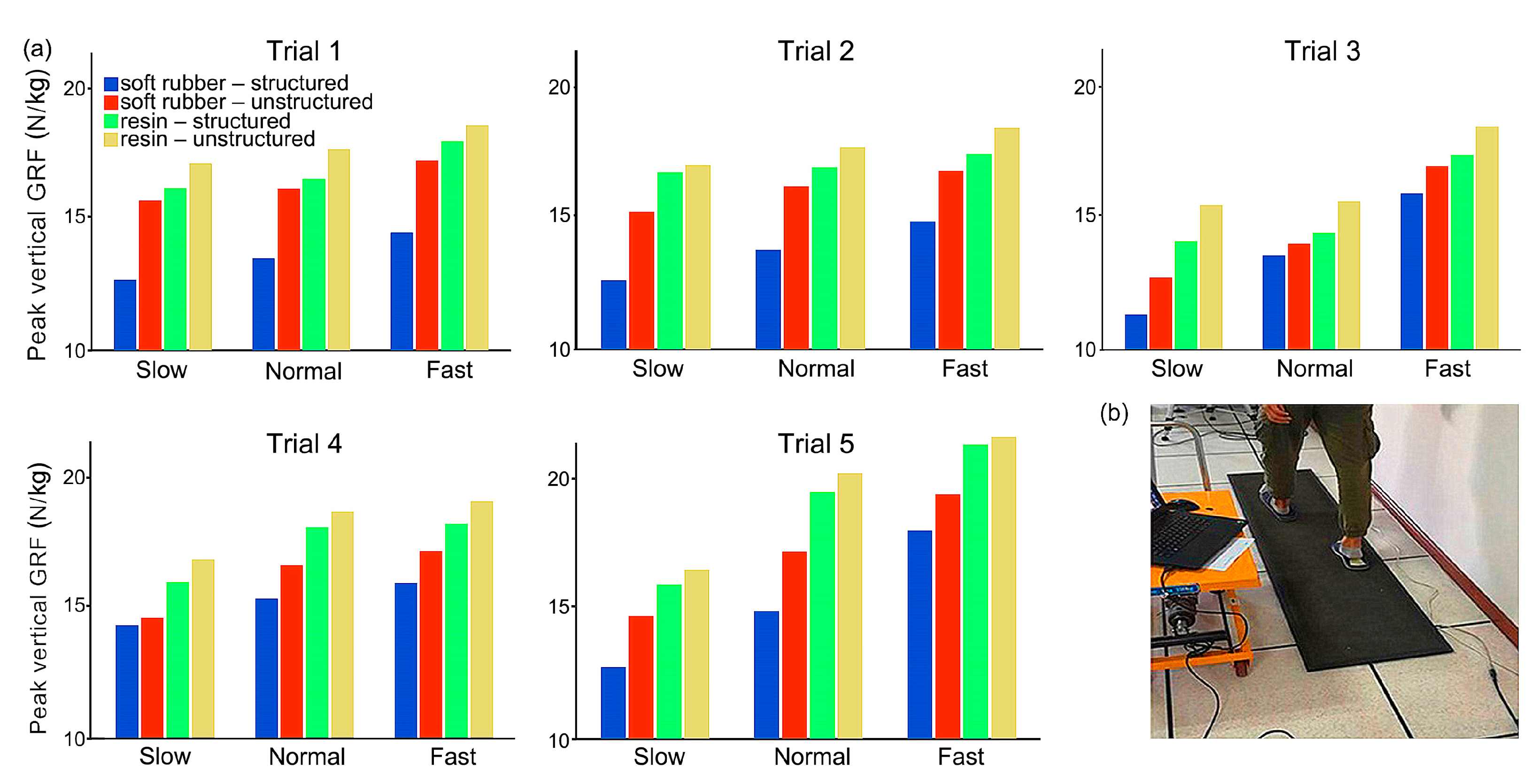
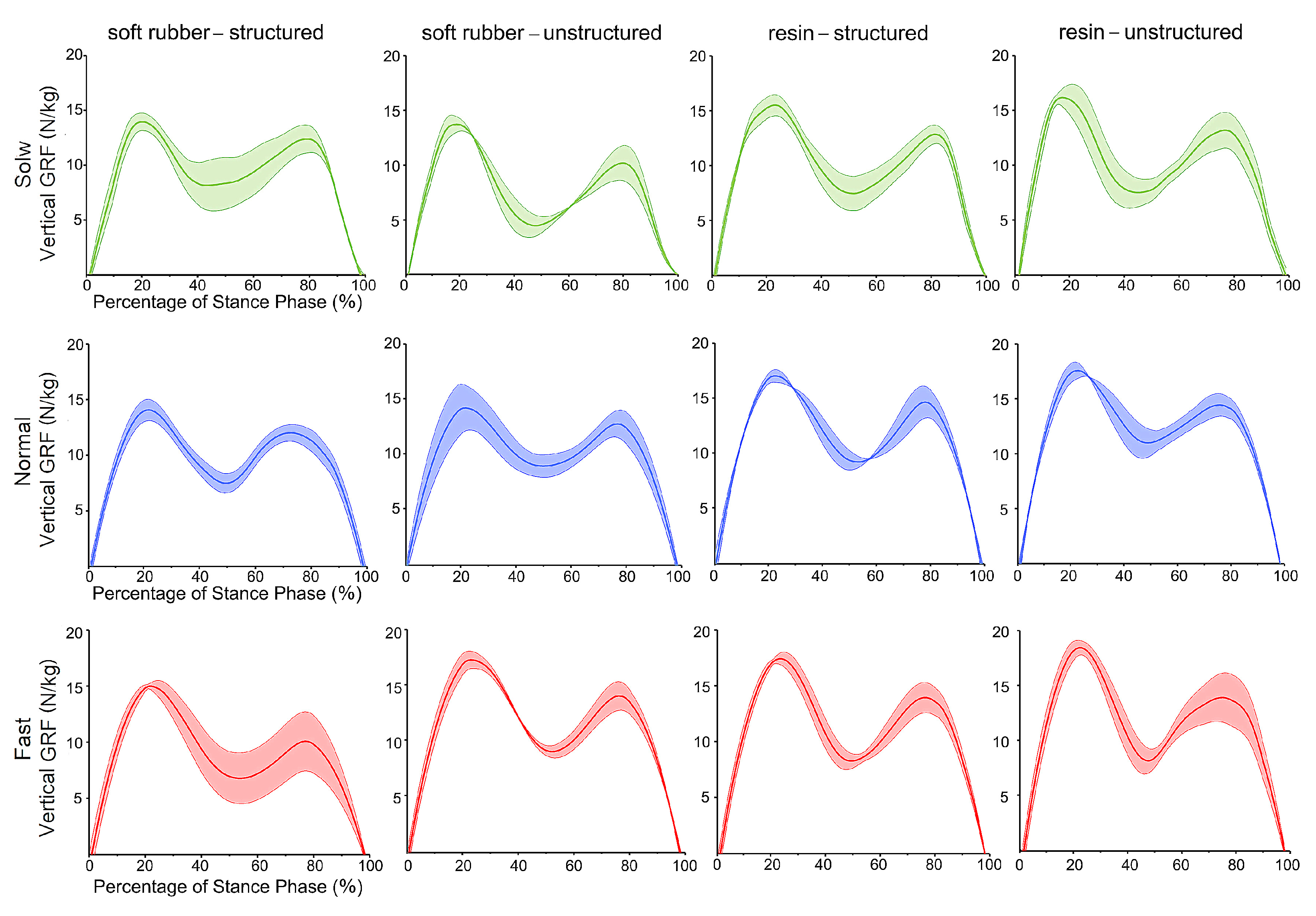
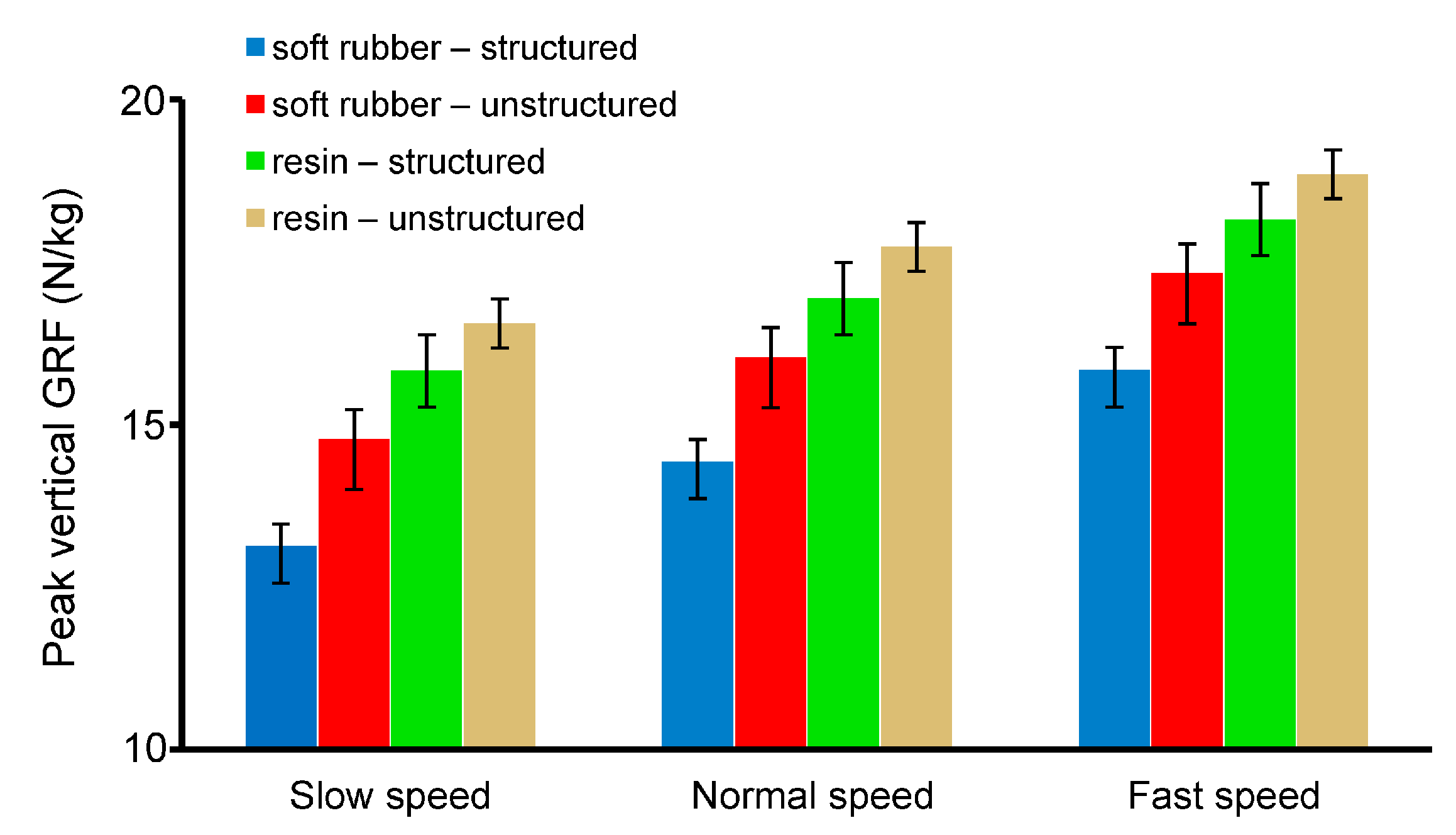
3.4. Physical Tests of Human Walking
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liddle, D.; Rome, K.; Howe, T. Vertical ground reaction forces in patients with unilateral plantar heel pain—A pilot study. Gait Posture 2000, 11, 62–66. [Google Scholar] [CrossRef]
- Rome, K.; Campbell, R.; Flint, A.; Haslock, I. Heel pad thickness—A contributing factor associated with plantar heel pain in young adults. Foot Ankle Int. 2002, 23, 142–147. [Google Scholar] [CrossRef] [PubMed]
- Nickel, E. Passive prosthetic ankle-foot mechanism for automatic adaptation to sloped surfaces. J. Rehabil. Res. Dev. 2014, 51, 803. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Choi, S.; Kim, S.; Roh, J.; Park, J.; Park, S.H.; Park, S.-J.; Yoon, J. Performance test for laminated-type prosthetic foot with composite plates. Int. J. Precis. Eng. Manuf. 2019, 20, 1777–1786. [Google Scholar] [CrossRef]
- Collins, S.H.; Kuo, A.D. Recycling energy to restore impaired ankle function during human walking. PLoS ONE 2010, 5, e9307. [Google Scholar] [CrossRef] [Green Version]
- Hafner, B.J.; Sanders, J.E.; Czerniecki, J.M.; Fergason, J. Transtibial energy-storage-and-return prosthetic devices: A review of energy concepts and a proposed nomenclature. J. Rehabil. Res. Dev. 2002, 39, 1–11. [Google Scholar]
- Cotchett, M.P.; Whittaker, G.; Erbas, B. Psychological variables associated with foot function and foot pain in patients with plantar heel pain. Clin. Rheumatol. 2015, 34, 957–964. [Google Scholar] [CrossRef]
- American Physical Therapy, A. Heel pain--plantar fasciitis: Clinical practice guildelines linked to the international classification of function, disability, and health from the orthopaedic section of the American Physical Therapy Association. J. Orthop. Sport. Phys. Ther. 2008, 38, A1–A18. [Google Scholar]
- Perry, J. Anatomy and biomechanics of the hindfoot. Clin. Orthop. Relat. Res. 1983, 177, 9–15. [Google Scholar] [CrossRef]
- Rome, K. Mechanical properties of the heel pad: Current theory and review of the literature. Foot 1998, 8, 179–185. [Google Scholar] [CrossRef]
- Natali, A.N.; Fontanella, C.G.; Carniel, E.L. Constitutive formulation and analysis of heel pad tissues mechanics. Med. Eng. Phys. 2010, 32, 516–522. [Google Scholar] [CrossRef] [PubMed]
- Jørgensen, U. Achillodynia and loss of heel pad shock absorbency. Am. J. Sport. Med. 1985, 13, 128–132. [Google Scholar] [CrossRef] [PubMed]
- Jørgensen, U.; Larsen, E.; Varmarken, J.E. The HPC-device: A method to quantify the heel pad shock absorbency. Foot Ankle 1989, 10, 93–98. [Google Scholar] [CrossRef]
- Billah, M.M.; Ahmed, M.; Farhana, S. Walking hexapod robot in disaster recovery: Developing algorithm for terrain negotiation and navigation. Int. J. Mech. Mechatron. Eng. 2008, 2, 795–800. [Google Scholar]
- Zhang, L.; Liu, X.; Guo, X. Development of Hexapod Robot with one passive joint on foot. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics, Macao, China, 5–8 December 2017; pp. 1082–1087. [Google Scholar]
- Sun, W.; Su, S.-F.; Xia, J.; Nguyen, V.-T. Adaptive fuzzy tracking control of flexible-joint robots with full-state constraints. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 2201–2209. [Google Scholar] [CrossRef]
- Ling, S.; Wang, H.; Liu, P.X. Adaptive fuzzy tracking control of flexible-joint robots based on command filtering. IEEE Trans. Ind. Electron. 2019, 67, 4046–4055. [Google Scholar] [CrossRef]
- Hamill, S.; Peele, B.; Ferenz, P.; Westwater, M.; Shepherd, R.F.; Kress-Gazit, H. Gait synthesis for modular soft robots. In International Symposium on Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 669–678. [Google Scholar]
- Zhang, L.; Liu, X.; Ren, P.; Gao, Z.; Li, A. Design and Research of a Flexible Foot for a Multi-Foot Bionic Robot. Appl. Sci. 2019, 9, 3451. [Google Scholar] [CrossRef] [Green Version]
- Bennett, M.B.; Ker, R.F. The mechanical properties of the human subcalcaneal fat pad in compression. J. Anat. 1990, 171, 131. [Google Scholar]
- Dickinson, J.A.; Cook, S.D.; Leinhardt, T.M. The measurement of shock waves following heel strike while running. J. Biomech. 1985, 18, 415–422. [Google Scholar] [CrossRef]
- Ker, R.F.; Bennett, M.B.; Alexander, R.M.; Kester, R.C. Foot strike and the properties of the human heel pad. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 1989, 203, 191–196. [Google Scholar] [CrossRef]
- Rodgers, M.M. Dynamic foot biomechanics. J. Orthop. Sport. Phys. Ther. 1995, 21, 306–316. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jørgensen, U.; Ekstrand, J. Significance of heel pad confinement for the shock absorption at heel strike. Int. J. Sport. Med. 1988, 9, 468–473. [Google Scholar] [CrossRef] [PubMed]
- Jahss, M.H.; Kummer, F.; Michelson, J.D. Investigations into the fat pads of the sole of the foot: Heel pressure studies. Foot Ankle 1992, 13, 227–232. [Google Scholar] [CrossRef] [PubMed]
- Cavanagh, P.R.; Valiant, G.A.; Misevich, K.W. Biological aspects of modeling shoe/foot interaction during running. In Sports Shoes and Playing Surfaces; Fredericks, E.C., Ed.; Human Kinetics: Champaign, IL, USA, 1984; pp. 24–46. [Google Scholar]
- Cavanagh, P.R.; Lafortune, M.A. Ground reaction forces in distance running. J. Biomech. 1980, 13, 397–406. [Google Scholar] [CrossRef] [PubMed]
- Nakamura, S.; Crowninshield, R.D.; Cooper, R.R. An analysis of soft tissue loading in the foot—A preliminary report. Bull. Prosthet. Res. 1981, 10, 27–34. [Google Scholar]
- Chanda, A.; McClain, S. Mechanical modeling of healthy and diseased calcaneal fat pad surrogates. Biomimetics 2019, 4, 1. [Google Scholar] [CrossRef] [Green Version]
- Jahss, M.H.; Michelson, J.D.; Desai, P.; Kaye, R.; Kummer, F.; Buschman, W.; Watkins, F.; Reich, S. Investigations into the fat pads of the sole of the foot: Anatomy and histology. Foot Ankle 1992, 13, 233–242. [Google Scholar] [CrossRef]
- Dalal, S.; Widgerow, A.D.; Evans, G.R.D. The plantar fat pad and the diabetic foot—A review. Int. Wound J. 2015, 12, 636–640. [Google Scholar] [CrossRef]
- Jones, F.W.; Peltier, L.F. Structure and function as seen in the foot. Clin. Orthop. Relat. Res. 2001, 391, 3–6. [Google Scholar] [CrossRef] [Green Version]
- Hsu, T.-C.; Lee, Y.-S.; Shau, Y.-W. Biomechanics of the heel pad for type 2 diabetic patients. Clin. Biomech. 2002, 17, 291–296. [Google Scholar] [CrossRef]
- Negishi, T.; Ito, K.; Kamono, A.; Lee, T.; Ogihara, N. Strain-rate dependence of viscous properties of the plantar soft tissue identified by a spherical indentation test. J. Mech. Behav. Biomed. Mater. 2020, 102, 103470. [Google Scholar] [CrossRef] [PubMed]
- Buschmann, W.R.; Jahss, M.H.; Kummer, F.; Desai, P.; Gee, R.O.; Ricci, J.L. Histology and histomorphometric analysis of the normal and atrophic heel fat pad. Foot Ankle Int. 1995, 16, 254–258. [Google Scholar] [CrossRef] [PubMed]
- Blechschmidt, E. The structure of the calcaneal padding. Foot Ankle 1982, 2, 260–283. [Google Scholar] [CrossRef]
- Hsu, C.-C.; Tsai, W.-C.; Wang, C.-L.; Pao, S.-H.; Shau, Y.-W.; Chuan, Y.-S. Microchambers and macrochambers in heel pads: Are they functionally different? J. Appl. Physiol. 2007, 102, 2227–2231. [Google Scholar] [CrossRef] [PubMed]
- Han, D.; Zhang, R.; Yu, G.; Jiang, L.; Li, D.; Li, J. Study on bio-inspired feet based on the cushioning and shock absorption characteristics of the ostrich foot. PloS ONE 2020, 15, e0236324. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.-Y.; Lin, C.-C.; Chou, Y.-C.; Chen, P.-Y.; Wang, C.-L. Heel pad stiffness in plantar heel pain by shear wave elastography. Ultrasound Med. Biol. 2015, 41, 2890–2898. [Google Scholar] [CrossRef]
- Li, L.; Yang, L.; Yu, F.; Shi, J.; Zhu, L.; Yang, X.; Teng, H.; Wang, X.; Jiang, Q. 3D printing individualized heel cup for improving the self-reported pain of plantar fasciitis. J. Transl. Med. 2018, 16, 167. [Google Scholar] [CrossRef]
- Miao, H.; Fu, J.; Qian, Z.; Ren, L.; Ren, L. How does the canine paw pad attenuate ground impacts? A multi-layer cushion system. Biol. Open 2017, 6, 1889–1896. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Soft Rubber-Structured | Resin-Structured | Soft Rubber-Unstructured | Resin-Unstructured |
|---|---|---|---|---|
| Mesh quantity | 92,653 | 92,653 | 32,048 | 32,048 |
| Young’s modulus (MPa) | 6 | 12 | 6 | 12 |
| Poisson’s ratio | 0.47 | 0.3 | 0.47 | 0.3 |
| Position | Name | Thickness (mm) | Shore Hardness (HA) |
|---|---|---|---|
| Top layer (Deepest) | Deep epidermal top cover | 2 | 30 |
| Second layer | Deep subcutaneous tissue | 5 | 30 |
| Third layer | Superficial subcutaneous tissue | 6 | 60 |
| Fourth layer | Reticular dermis | 3 | 50 |
| Bottom layer (Most superficial) | Posterior epidermis | 4 | 80 |
| Name | Soft Rubber-Structured | Resin-Structured | Soft Rubber-Unstructured | Resin-Unstructured |
|---|---|---|---|---|
| Max. stress (MPa) | 5.41 | 7.51 | 9.45 | 11.68 |
| Max. deformation (mm) | 2.35 × 10−2 | 1.14 × 10−2 | 2.12 × 10−2 | 1.09 × 10−3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, J.; Wang, K.; Ren, L.; Qian, Z.; Lu, X.; Liang, W.; Xu, X.; Zhao, S.; Zhao, D.; Wang, X.; et al. Optimization Design of the Inner Structure for a Bioinspired Heel Pad with Distinct Cushioning Property. Bioengineering 2023, 10, 49. https://doi.org/10.3390/bioengineering10010049
Jin J, Wang K, Ren L, Qian Z, Lu X, Liang W, Xu X, Zhao S, Zhao D, Wang X, et al. Optimization Design of the Inner Structure for a Bioinspired Heel Pad with Distinct Cushioning Property. Bioengineering. 2023; 10(1):49. https://doi.org/10.3390/bioengineering10010049
Chicago/Turabian StyleJin, Jianqiao, Kunyang Wang, Lei Ren, Zhihui Qian, Xuewei Lu, Wei Liang, Xiaohan Xu, Shun Zhao, Di Zhao, Xu Wang, and et al. 2023. "Optimization Design of the Inner Structure for a Bioinspired Heel Pad with Distinct Cushioning Property" Bioengineering 10, no. 1: 49. https://doi.org/10.3390/bioengineering10010049