

Multivariable Model Predictive Control to Control Bio-H2 Production from Biomass


Department of Chemical Engineering, Faculty of Engineering, Universitas Indonesia, Depok 16424, Indonesia
*
Authors to whom correspondence should be addressed.
ChemEngineering 2023, 7(1), 7; https://doi.org/10.3390/chemengineering7010007
Submission received: 5 October 2022
/
Revised: 3 January 2023
/
Accepted: 5 January 2023
/
Published: 13 January 2023
Abstract
:Two significant units in biomass-based hydrogen plants are the compressor and steam reformer. The compressor works to achieve high pressure for further operations, while the steam reformer produces H2 gas. For the units to operate well against disturbances that may occur (regulatory control) or changes in the set point (servo control), as well as the interactions between the relevant process variables, a Multivariable Model Predictive Control (MMPC) is considered as a controller. The determination of MMPC parameters, including the sampling time (T), prediction horizon (P), and control horizon (M), is crucial for achieving such objectives. Therefore, in this study, MMPC parameter adjustment was performed. The Integral of Absolute Error (IAE) and Integral of Square Error (ISE) were used as control performance indicators. For comparison, we considered the IAE and ISE from the Single-Input Single-Output (SISO)-based Model Predictive Control (MPC) from previous research. As a result, the optimum MMPC parameters were found to be T = 1, P = 341, and M = 121 for the compressor unit, and T = 1, P = 45, and M = 21 for the steam reformer unit. The average increases in control performance (IAE and ISE), compared to the MPC (SISO) used in previous research, were 85.84% for compressor unit 1, 61.39% for compressor unit 2, 94.57% for compressor unit 3, and 73.35% for compressor unit 4. Meanwhile, in the steam reformer unit, the increases in control performance were 63.34% for the heater and 80.16% for the combustor.
1. Introduction
Hydrogen is a substance with many functions. In the chemical industry, hydrogen is used as a raw material for fertilizers, as a raw material for hydrogen peroxide, as a catalyst for hydrogenation reactions, and so on [1]. In addition, hydrogen can serve as an alternative fuel [2].
Indonesia is a country with massive potential for the development of renewable energy, including the use of power plant waste and biomass pellets as a national energy source [3]. Using biomass as raw material for hydrogen production provides promising opportunities. With renewable energy, Indonesia and other countries can move away from reliance on non-renewable raw materials, such as fossil fuels.
Biomass-based hydrogen plants contain raw material processing units, gasification units, char decomposer units, compression units, steam reforming units, char combustor units, cooler units, H2S removal units, and pressure swing absorber units (Budianta et al., 2011) [4]. The function of the compression unit is to increase the pressure of the gasification unit product. As a result, the pressure required for the H2S removal operating condition can be achieved. The steam reforming unit converts water in a liquid state into steam. The heat is obtained from the reaction products between methane and steam, which are stored.
Process control of both of these units aims to maintain the operating conditions of the plant, such that it operates in its optimal environment. In addition, this control functions to maintain the operational stability of the plant in the event of an external disturbance, ensuring safety and preventing damage to the equipment in the two units.
In 2012, Cortinovis et al. performed a study on controlling compressor air pressure in the oil and gas industry [5], where MPC was used as the controller. The inputs to this control are pressure, mass flow rate, temperature, and monitor drive (speed, torque, voltage, and compressor current). Then, the output includes valve opening and drive command. This system is called torque-assisted anti-surge control (TASC). They compared this system with a conventional one using a PI controller, instead of a variable speed drive (VSD). Other studies have also focused on controlling compressors, and showed that MPC can control compressors in gas compression systems [6,7].
Some research has considered the control of steam reformer units [8,9,10,11]. Wang et al. (2021) researched controlling steam methane reforming reactors using MPC [10]. The controlled variables were the temperature of the reactor wall and the composition of the output hydrogen, achieved by manipulating the mass flow rate. The control test was carried out by including a disturbance to the mass flow rate as much as 10% of the initial mass flow rate. A comparison of the performance of a PI controller with the MPC was also carried out, which showed that the MPC led to a lower overshoot than the PI controller.
Wahid and Taqwallah (2018) studied MPC compressor control and steam reforming, but the basis was MPC (SISO), which was less effective in capturing the interactions between existing operating variables and required a lot of MPC, leading to high capital expenditure (capex) costs [12]. Therefore, in this study, MMPC was used to overcome these issues, as has been considered for a quadcopter with four rotors, which produced control performance that is very close to the setpoint [13].
2. Methods
2.1. Research Flowchart
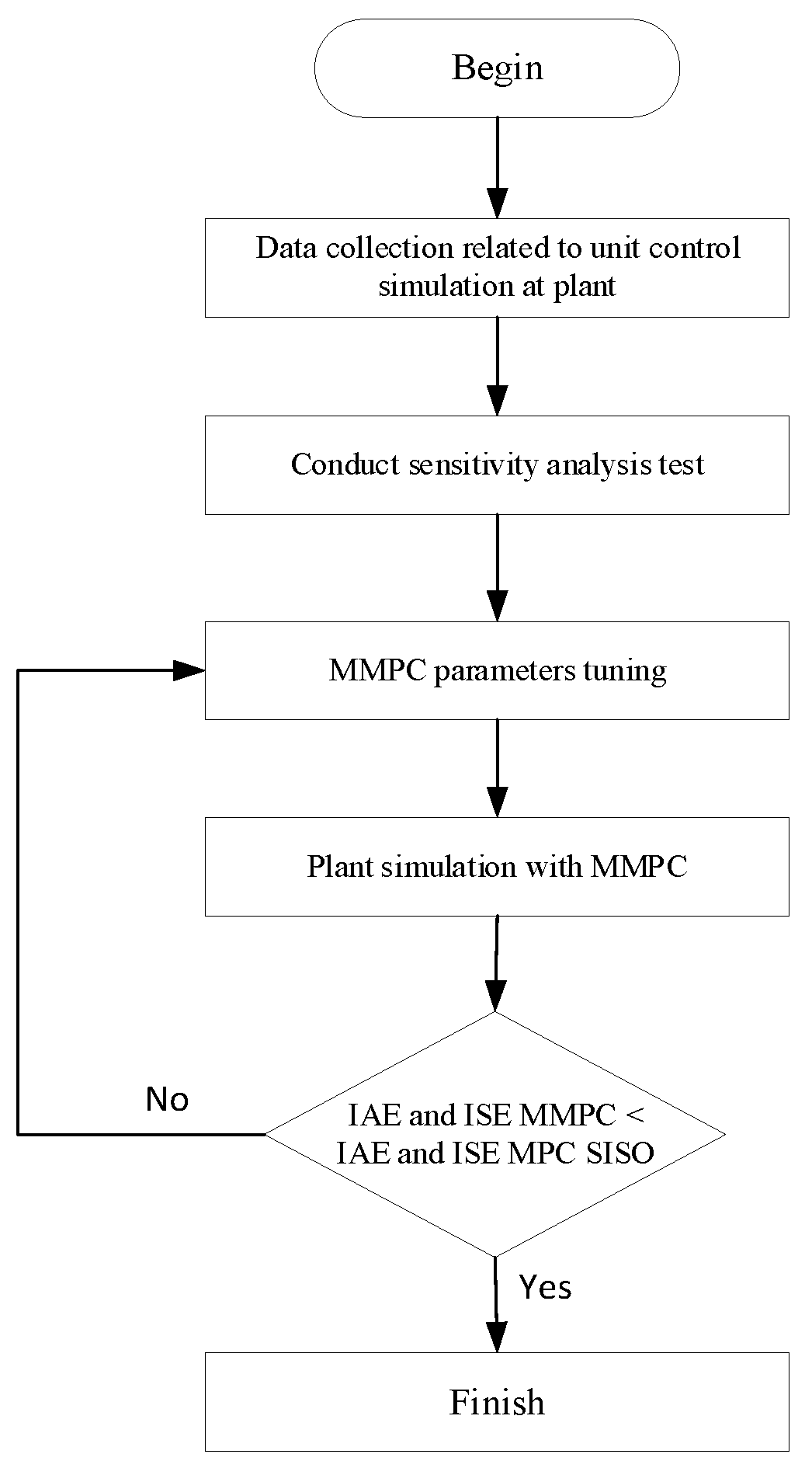
The research methodology consists of several steps. To carry out these steps, researchers may perform simulations using process simulation software. Figure 1 shows the research method flowchart.
2.2. Data Collection
For this study, we used the design of a hydrogen biomass plant by Budianta et al. (2011) [4], which includes a compressor unit and a steam reformer. Biogas reforming is the process of producing hydrogen from natural gas [14,15], with the main reaction being
This reaction is catalytic and takes place at 1000 °C. The heat from the reformed product functions to produce steam before further processing in a converter, where most of the carbon monoxide (CO) is converted into carbon dioxide CO2.
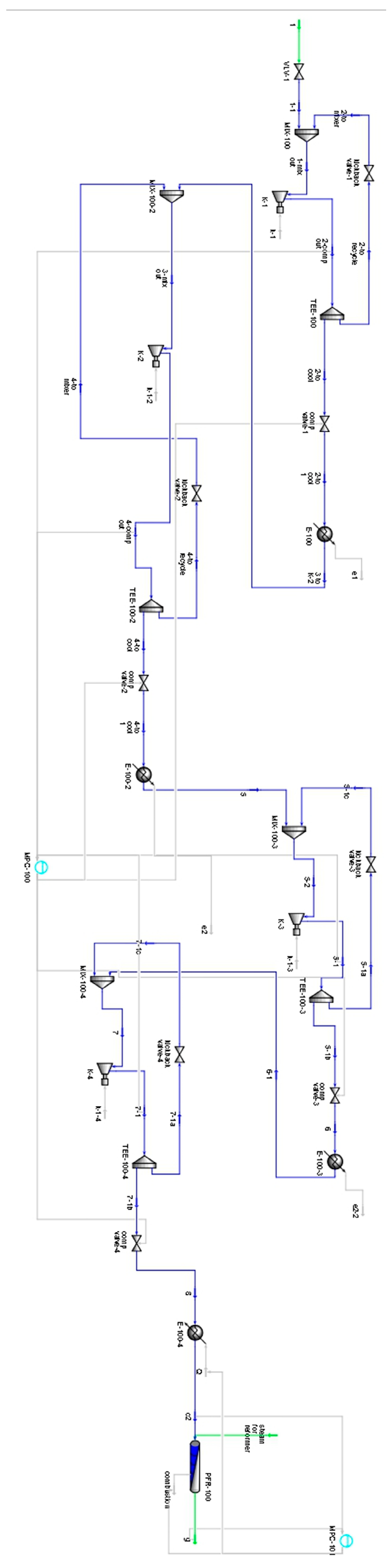
Figure 2 shows the process flow diagram of the compressor and steam reformer units in the biohydrogen plant. The compressor used was a multi-stage type with four stages, which increases the pressure from 155.25 kPa to 3172 kPa. The operating conditions for the inlet and outlet pressures of each compressor, with a pressure drop for each inter-cooler of 8–20 kPa, are shown in Table 1. Meanwhile, the outlet temperature of the heater and that inside the combustor were 650 °C and 982 °C, respectively.
2.3. System Identification
System identification was carried out to obtain a MIMO model that captures the interaction between the variables involved in the compressor and steam reformer units for hydrogen production in the biomass plant. Table 4 lists the CVs (controlled variables), MVs (manipulated variables), and disturbances in the compressor and steam reformer units. A test was carried out, using an open-loop system, by changing the value of the MVs by +10% in compressor units and +20% in the steam reformer. The results obtained provided process reaction curves (PRC) for all MVs and CVs involved. Using the Smith method, a First Order Plus Dead Time (FOPDT) model was generated for each PRC obtained [16].
2.4. Controller Tuning
The next step was to set the MMPC parameters (T, P, and M) using the Shridhar and Cooper (S&C) method [17], followed by fine tuning (FT).
The control performance test was done in two ways. The first test was carried out by changing the SP (servo control), while the second was carried out by changing the disturbance (regulatory control). The disturbance test was carried out by changing the feed pressure by 4% from the initial pressure. To analyze the control performance, we calculated the Integral Absolute Error (IAE) and Integral of Square Error (ISE).
3. Results and Discussion
3.1. FOPDT Models
The FOPDT models for compressor units 1 and 2 are shown in Equations (2) and (3), respectively. In both equations, P is the compressor pressure, while the numbers 1–4 indicate compressors 1–4, respectively. The difference between Models 1 and 2 lies in the FOPDT model on the diagonal of the two matrices. In Model 1, all the FOPDT models resulted from the new system identification, while Model 2 used the FOPDT model in the previous study on the matrix diagonal. With these two models, we aimed to test whether the SISO-based FOPDT model, which has been used before, is still appropriate for use in the MIMO model.
For MIMO model 1,
For MIMO model 2,
In the steam reformer unit, the control valve is located on the heater flow. This test was carried out on the heater and the combustor, in order to determine the effect of valve opening on the heater flow at the output temperature of the heater (THeater) and combustor (TCombustor) by increasing the valve opening by 20% from its initial opening. The resulting MIMO model is shown in Equation (4):
3.2. MMPC Tuning
MMPC adjustment was performed using the S&C method, as well as fine tuning in order to improve the control performance of the S&C method. Initial guesses for fine-tuning were made based on the tuning results of the S&C method. Trial and error parameters T, P, and M were determined to obtain better results. The tuning results for each unit are shown in Table 5 and Table 6.
3.3. Control Performance with Setpoint Change
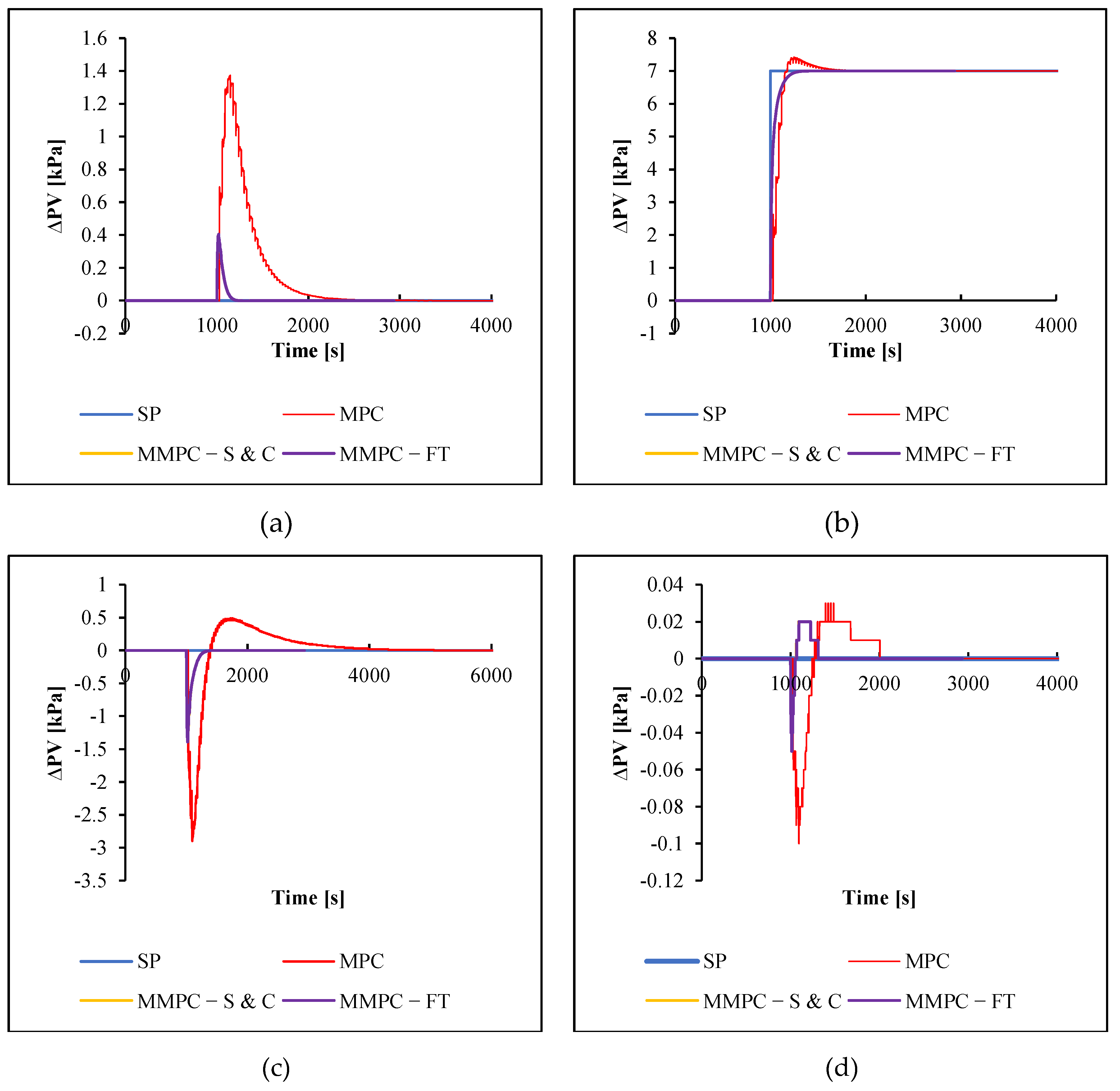
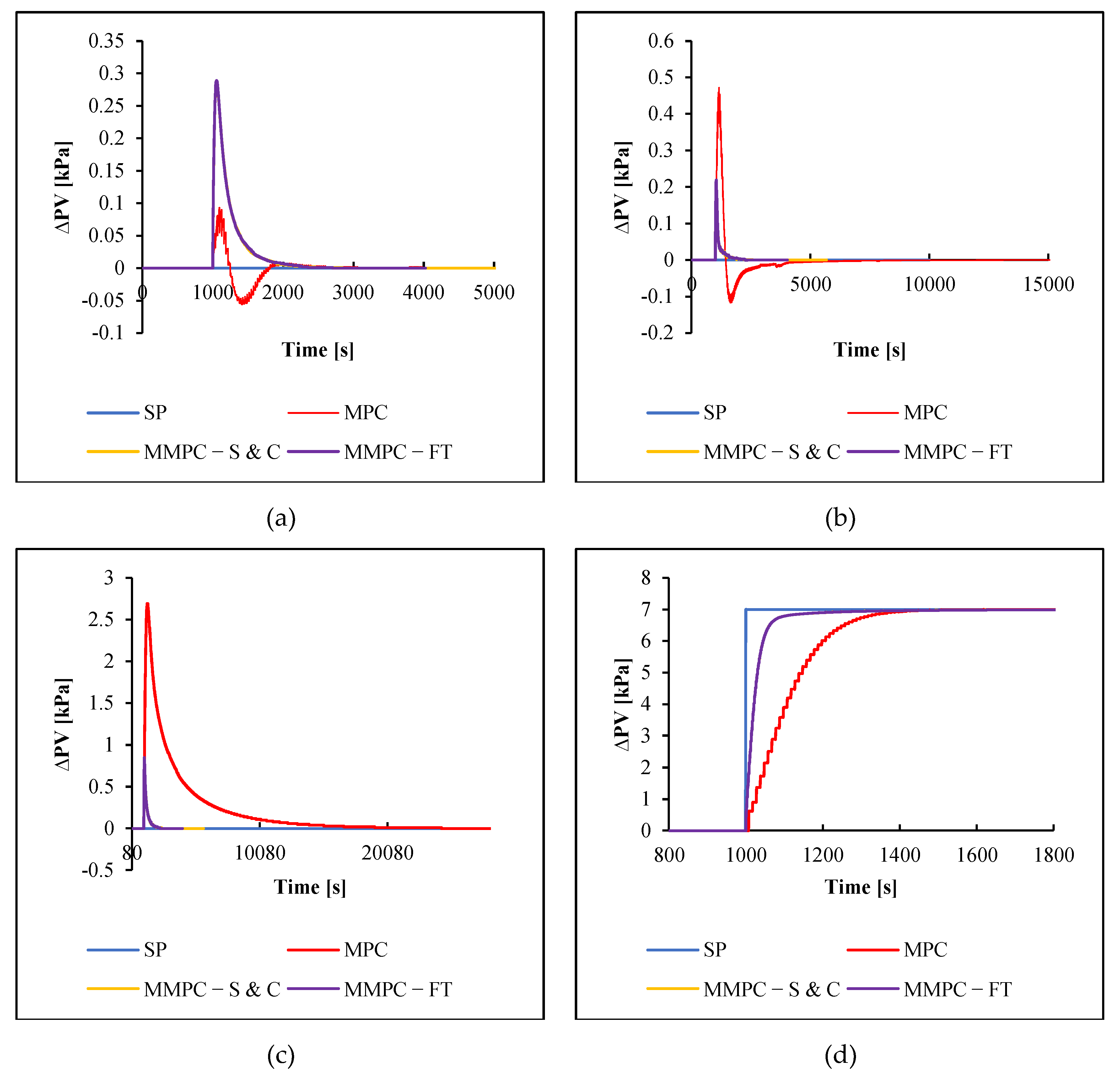
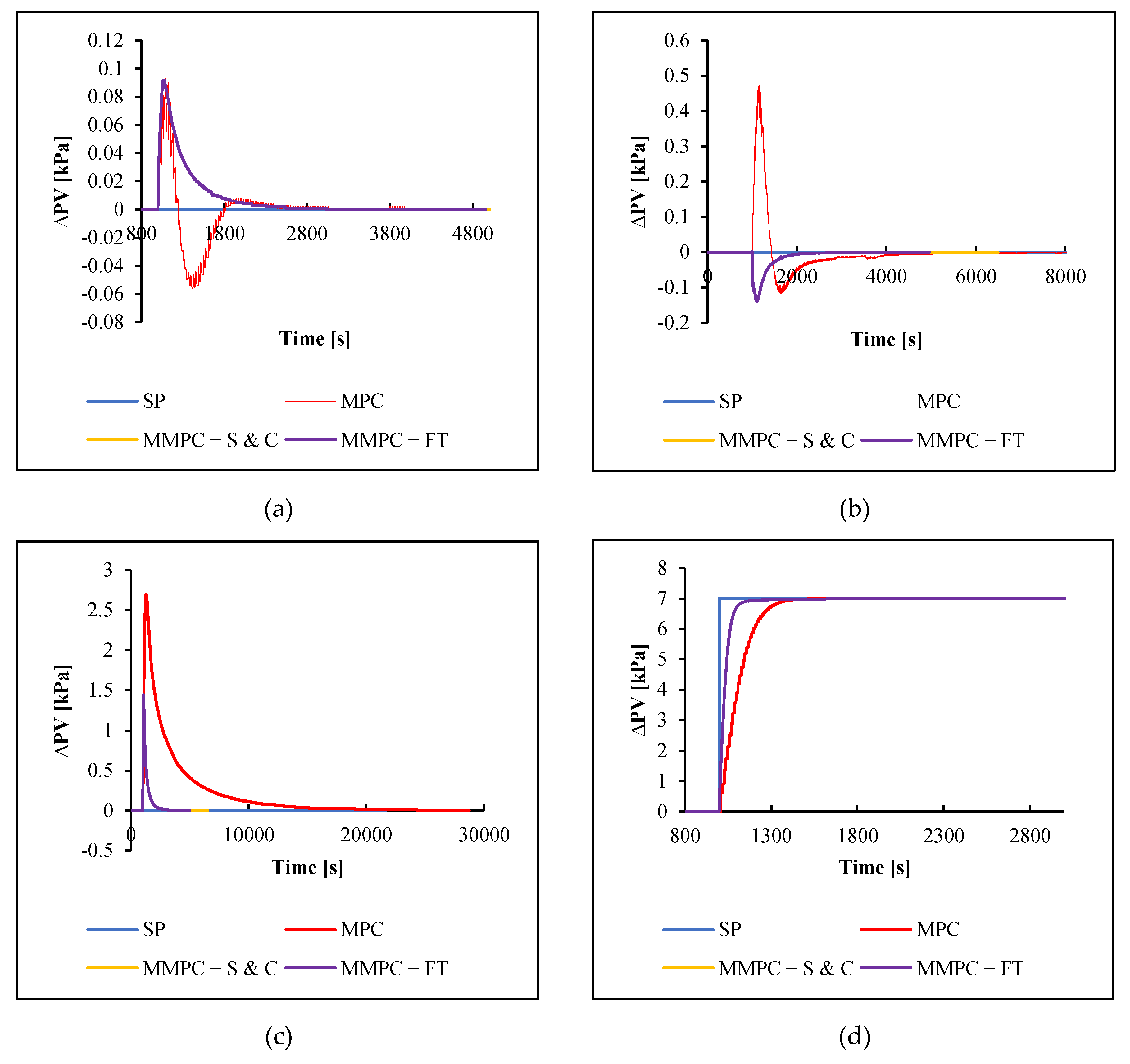
The performance control of MMPC on the compressor unit with the MIMO 1 model is shown in Figure 3, Figure 4, Figure 5 and Figure 6, with a change in SP of 7 kPa. MMPC provided better results than MPC. When the setpoint on compressor unit 1 was increased, the MMPC could respond more quickly to the change. Both MPC and MMPC on compressor 1 experienced an increase in pressure until they passed the SP (i.e., overshoot occurs), then decreased until reaching the SP. As a result of the change in SP of compressor 1, the pressure of the other compressor changed (interrupted). However, the MMPC managed to return to its SP better than MPC, as can be seen in Figure 3b–d. For compressor units 1–4, the IAE and ISE values of MMPC FT showed a significant difference from those of MPC. Meanwhile, the IAE and ISE values between MMPC S&C and MMPC FT did not have a significant difference, as shown in Table 7. Similar results occurred in the SP change test on compressors 2–4, as shown in Table 8, Table 9 and Table 10. All the CVs demonstrated final stability at their SP (0). Some of the IAE and ISE of MMPC FT and S&C had the same result but different percentages of improvement. This is caused by the calculations in the spreadsheet being performed with decimals up to ten decimal digits. Meanwhile, the results provided in this research were decimal numbers with two decimal digits.
Figure 3 shows the results with the increased SP on compressor unit 1. The change in the SP of compressor unit 1 can be seen in Figure 3a. The simulation results showed that in each compressor unit, MPC responded and achieved stability more slowly than MMPC. In addition, MMPC S&C and FT provided almost the same results and showed barely any difference in the graphs. However, the difference in the performance of the two controllers can be seen in the IAE and ISE, which are listed in Table 7. When the SP on compressor unit 1 was increased, the pressure on the next compressor unit decreased. It is because when the flow pressure increases, the flow rate decreases. This pressure drop will be stabilized by the controller. In Figure 3a, the shapes of the MMPC and MPC graphs were the same, but the MMPC responded more slowly and had almost no noise. The performance of other compressor units is shown in Figure 3b–d, where the patterns of the three graphs are not much different. In the three graphs, generally, there was no pressure drop on the MMPC, while the MPC experienced a significant pressure drop. This is because when the pressure drops, the MMPC immediately responds to stabilize the flow according to its SP. However, before reaching stability, the flow controlled by MMPC experienced a pressure increase shortly. MMPC S&C and MMPC FT had almost the same results, but MMPC FT generally had a slightly better percentage increase in performance than MMPC S&C, except for compressor unit 2. In the compressor, both IAE was the same, and ISE MMPC S&C was slightly superior. Meanwhile, compressor unit 4 showed a better MMPC S&C.
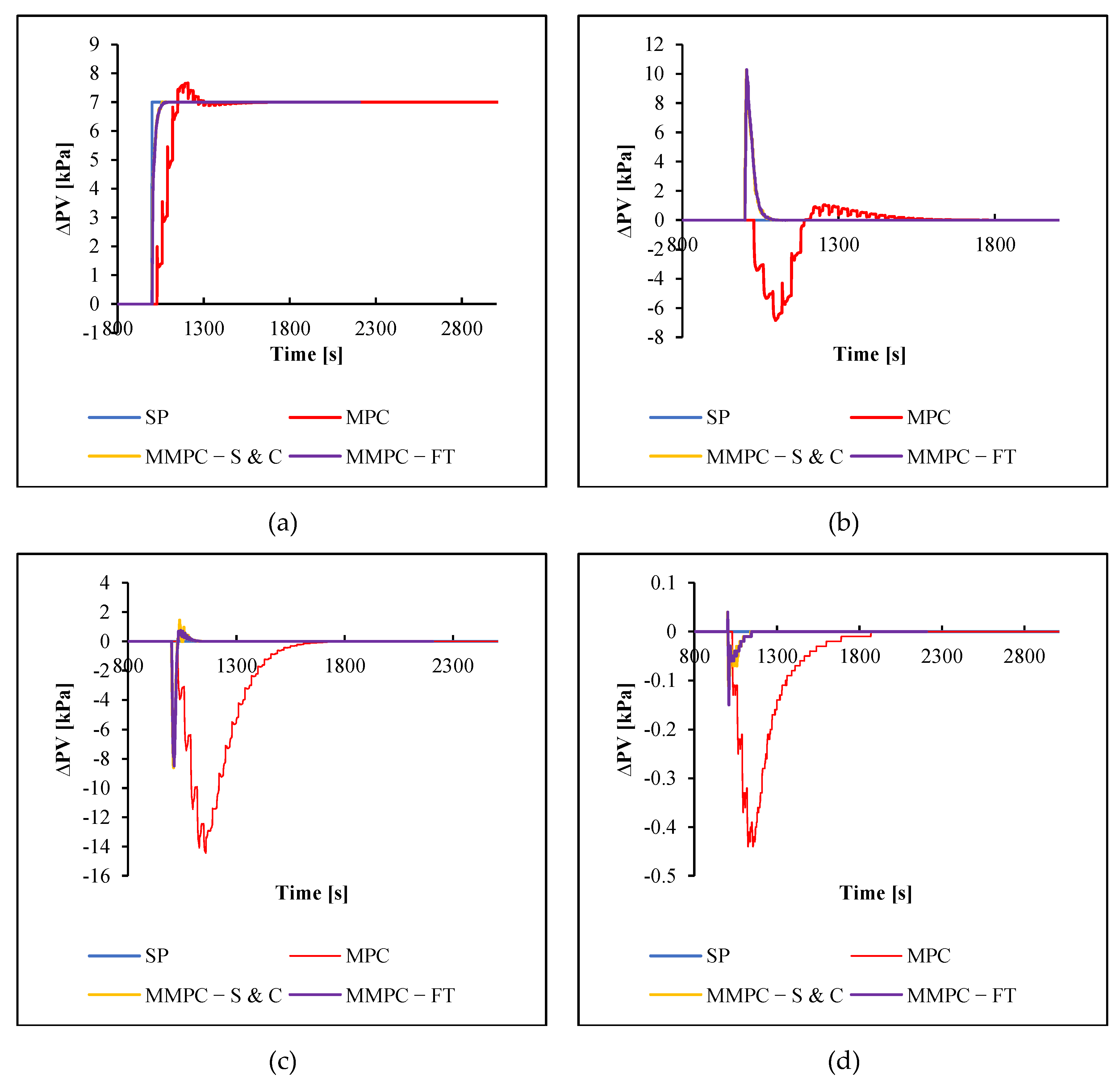
The performance of controlling the change in SP on compressor unit 2 is shown in Figure 4 and Table 8. The change in SP on compressor unit 2, as shown in Figure 4b, caused an increase in pressure in compressor unit 1 and a decrease in pressure in compressor unit after compressor unit 2. It can be concluded that changes in SP in a compressor unit will cause a pressure increase in the previous unit and a pressure decrease in the following unit. Figure 4b also shows that MMPC can immediately stabilize the pressure in the flow without having to exceed its SP, while the MPC has exceeded its SP. MMPC’s response to pressure increase in compressor unit 1 (Figure 4a) was faster and better than MPC. It is because the flow pressure at the MMPC only experiences a slight increase and can be stabilized more quickly. In addition, the control response to the pressure drop in compressor units 3 and 4 had a similar pattern (shown in Figure 4c,d) but with different line shapes. When the pressure decreases, the controller will respond to increase the pressure. In compressor unit 3 (Figure 4c), the MMPC can immediately stabilize the flow pressure according to the SP, while the MPC experienced an increase first. In Figure 4d, both MPC and MMPC experienced an increase in pressure before returning to their SP, but MMPC can restore the flow pressure according to its SP more quickly. Based on Table 8, MMPC FT generally had better control performance results than other controllers.
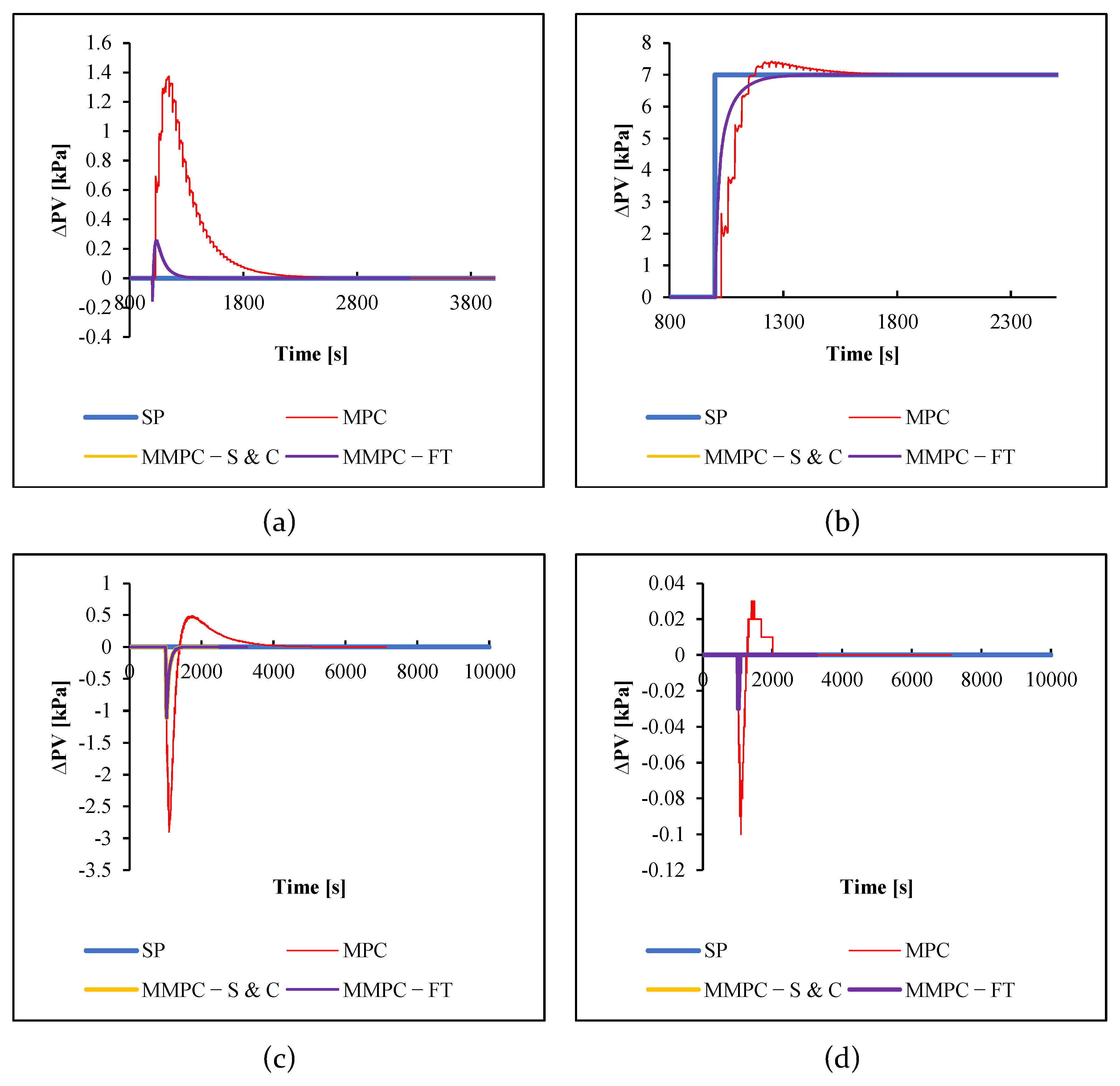
Figure 5 and Table 9 show the simulation results of process control with SP changes in compressor unit 3. A graph of SP changes is shown in Figure 5c, where MMPC can stabilize flow much faster than MPC. When the SP on compressor unit 3 changes, the MMPC-controlled flow pressure on compressor units 1 and 2 decreased instead of increasing (shown in Figure 5a,b). It is due to the response of the MMPC to excessive pressure increases, thus causing a decrease in pressure. Even so, MMPC still provided the best control performance results compared with MPC. Altogether, MMPC FT has the best results for compressor units 1, 2, and 3. However, for compressor unit 4, MPC provided the best control performance results because it has the fewest errors. The cause of this is the tuning factor in MPC, which is better than MMPC.
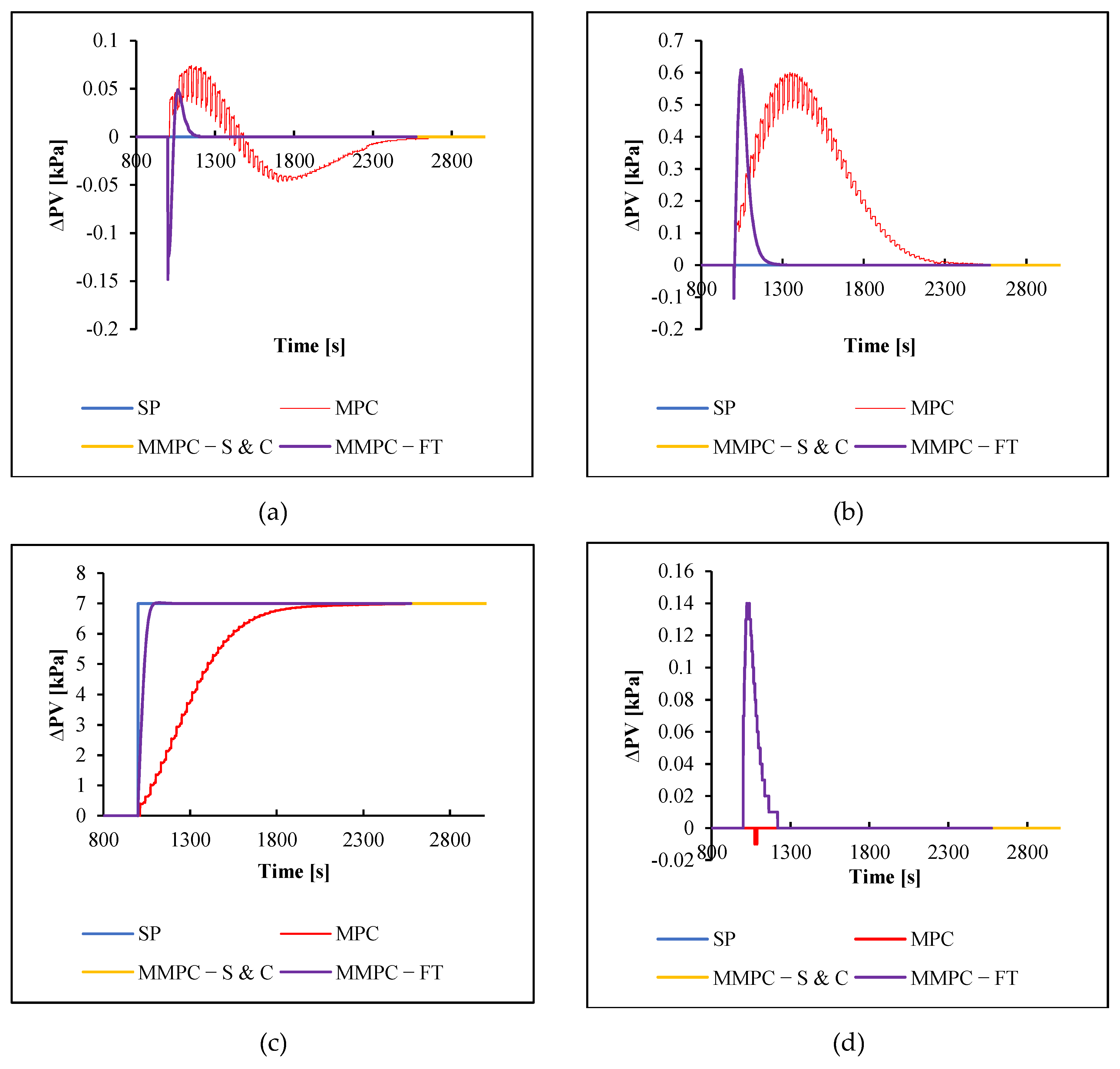
The simulation results for SP changes in compressor unit 4 are shown in Figure 6 and Table 10. SP changes in compressor unit 4 (shown in Figure 6d) caused the flow pressure in all compressor units to increase. In compressor units 1, 2, and 3 shown in Figure 6a–c, the MMPC controlled flow did not experience a pressure drop past its SP, but the pressure increase was directly lowered to its SP. The response from MMPC provided the best performance results for compressor units 1, 2, and 3, except for compressor unit 1. In compressor unit 1 (Figure 6a), the flow controlled by MMPC experienced a higher rise and a slower response than MPC. As previously explained, this can be caused by tuning factors. The results of this simulation differed from the changes in SP on the previous compressor units because the MMPC S&C generally has fewer errors.
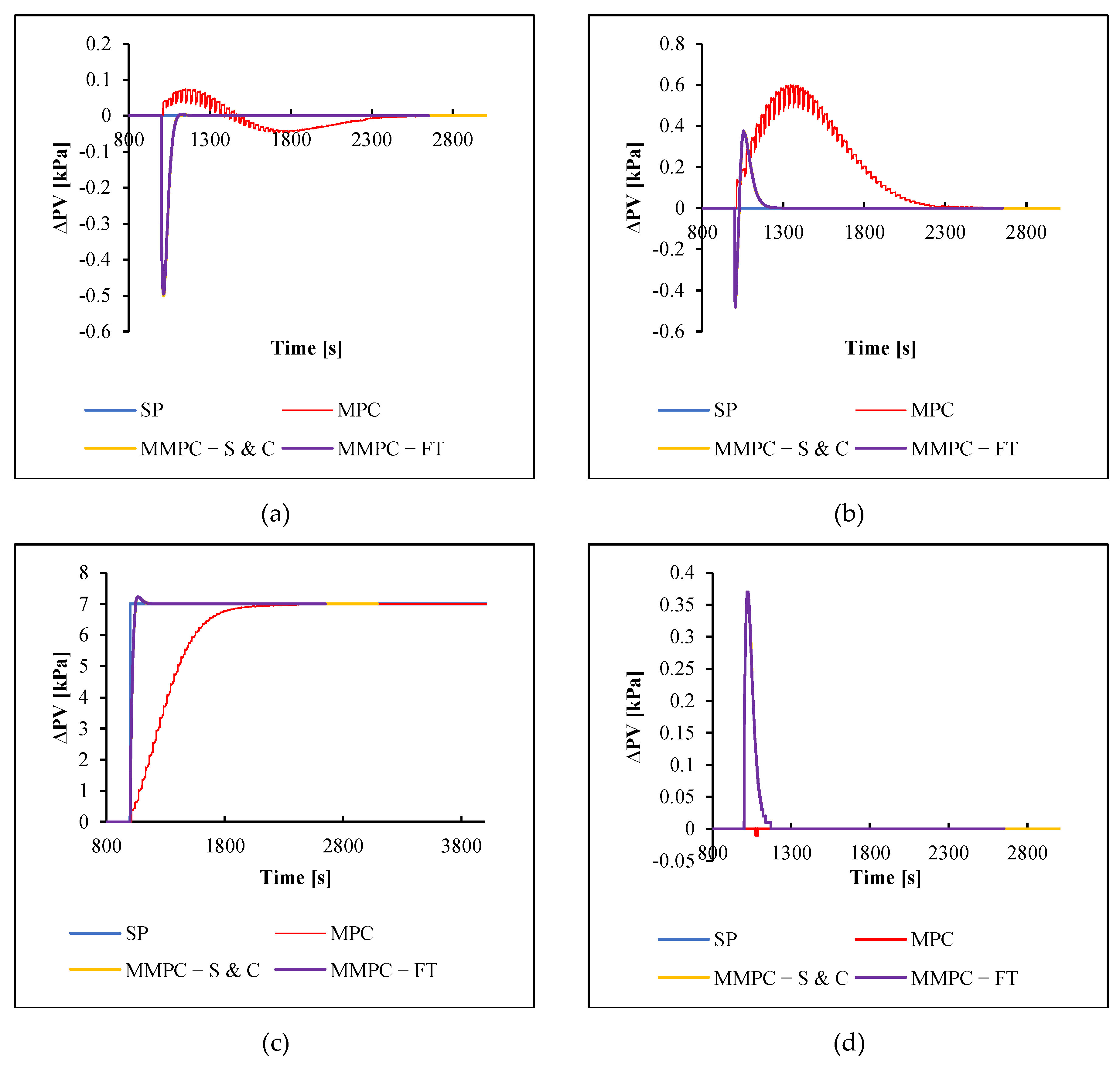
The MMPC performance control on the compressor units using the MIMO 2 model is shown, in Figure 7, Figure 8, Figure 9 and Figure 10, with a change in SP of 7 kPa (as before). The control performance was not much different from the MIMO 2 model, as shown in Table 11, Table 12, Table 13 and Table 14. The MMPC with MIMO 2 model did not produce a significant graph pattern difference compared to the MIMO 1 model, and neither did the analysis. It also becomes the reason why the MIMO 2 model and MIMO 1 model are not plotted in one graph. Both overlapped, so it would be hard to analyze them. Therefore, IAE was used to compare the performance between MPC and MMPC with the MIMO 2 and MIMO 1 models, as provided in Table 17.
MMPC S&C and FT with MIMO 2 model almost provided the same control performance results. Generally, MMPCs had better controller performance results, except on compressor unit 4 with SP changes on compressor unit 3 and compressor unit 1 with SP changes on compressor unit 4. The performance of MMPC S&C with SP changes on compressor unit 1, as shown in Figure 7 and Table 11, had better results than other controllers. MMPC FT had slightly better performance with SP changes on compressor unit 2, which are shown in Figure 8 and Table 12. Based on Figure 9 and Figure 10 and Table 13 and Table 14, MMPC S&C and MMPC FT had the same control performance due to the same amount of error.
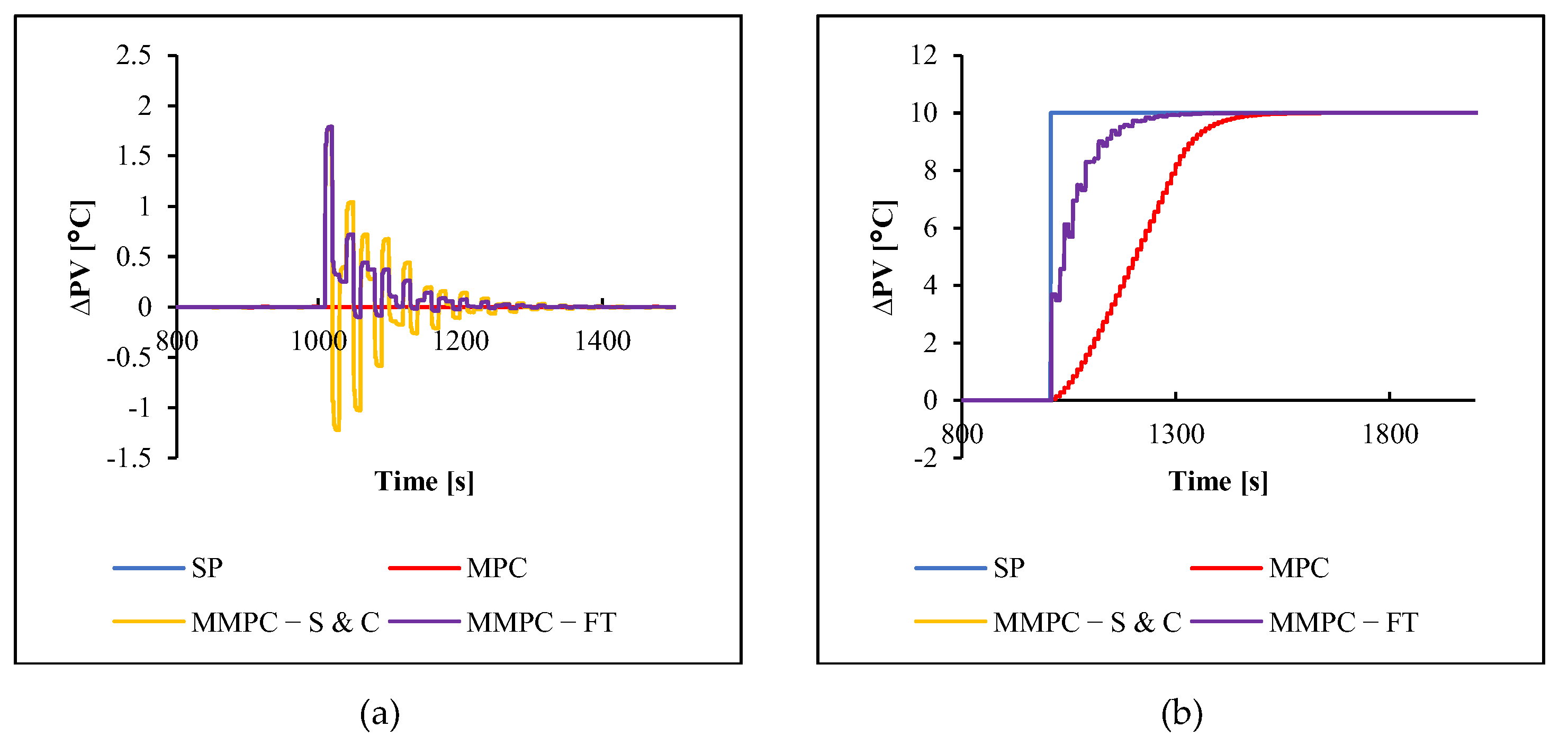
Control performance in the steam reformer and combustor units was carried out by changing the SP by +10 °C for both types of equipment (heater and combustor units). Figure 11 shows that, for the heater, MMPC FT was better than MPC and MMPC S&C, as detailed in Table 15. MPC produced an oscillating control behavior, leading to worse performance. The same thing happened when testing the SP change on the combustor unit, as shown by Figure 12 and Table 16.
Figure 11 and Table 15 show the results of controlling the steam reformer unit with changes in SP on the heater. Changes in SP on the heater caused temperature oscillations in the equipment, except for the flow controlled by the MMPC FT. This oscillation can be stabilized by any type of controller. The MMPC FT controlled flow has no oscillations and can be stabilized more quickly than other controllers. Considering Equation (3), the change in SP on the heater should not affect the combustion chamber. However, this is not the case. It may be caused by little changes in temperature, which are immediately responded to by the controller. When a sensitivity analysis was performed, the logger could not record these changes.
In Figure 12, the change in SP on the combustor did not produce oscillations in the tool but still occurred in the heater. Meanwhile, Table 16 shows that the MMPC FT could stabilize heater flow oscillations with the best control performance results. On the combustor, the resulting graph did not oscillate. MMPC S&C and FT had no difference in control performance.
Improved control performance on SP changes was achieved when using MMPC FT on compressor units with the MIMO 1 model, based on the IAE of 85.84% for compressor 1, 61.39% for compressor 2, 94.57% for compressor 3, and 73.35% for compressor 4 (or about 61– 95%); while, for the MIMO 2 model, it was 88.23% for compressor 1, 58.22% for compressor 2, 91.45% for compressor 3, and 66.71% for compressor 4 (or around 58–91%). Thus, the MIMO 1 model performed better than the MIMO 2 model, as detailed in Table 17. In the steam reformer unit, the increase in control performance using the MMPC FT based on IAE was 63.34% (heater) and 71.36% (combustor), as shown in Table 18.
3.4. Controller Performance with Disturbance
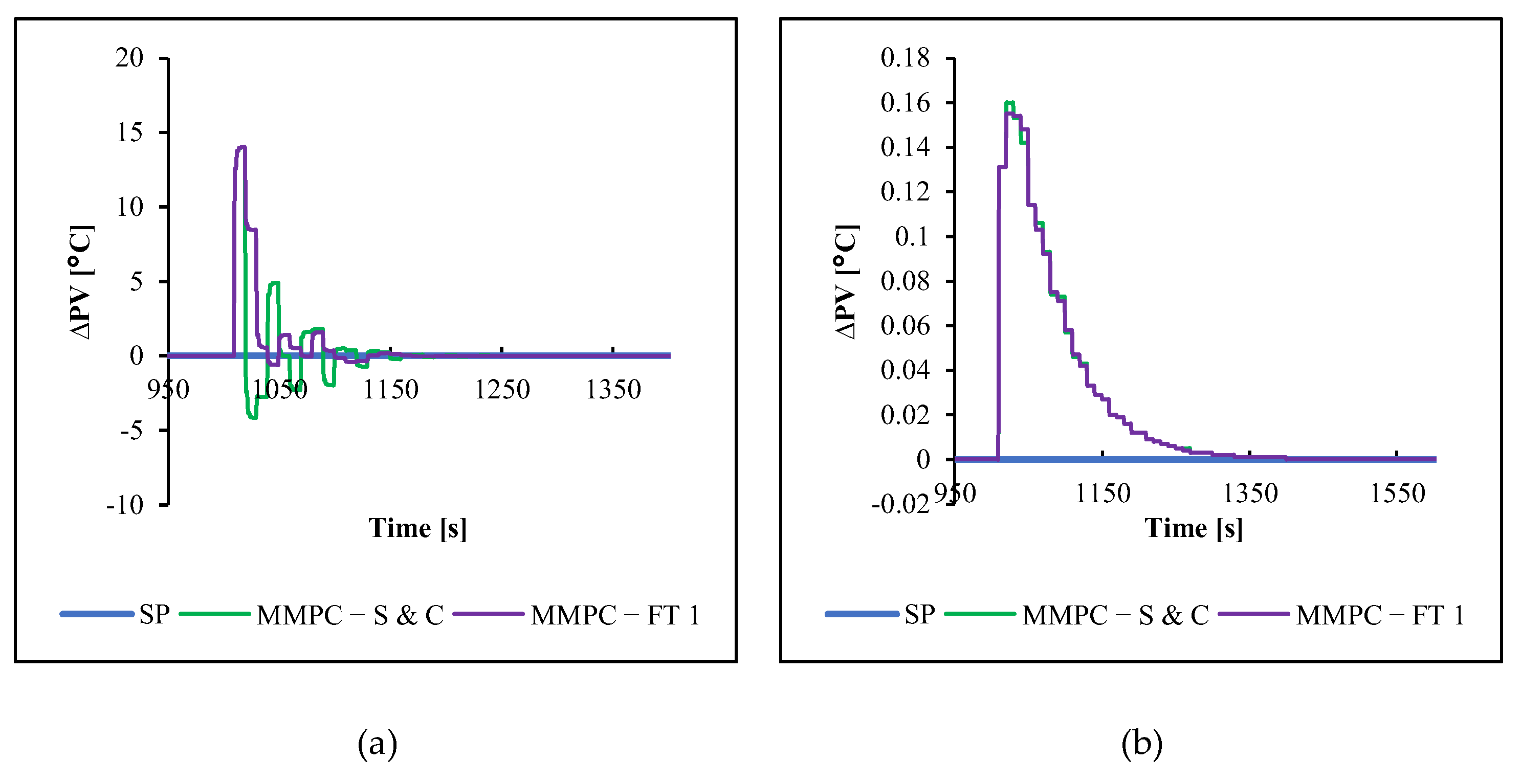
As previously mentioned, the disturbance test was carried out by changing the feed pressure by +4%. The MIMO model used in the compressor unit was MIMO 1, as MIMO 2 showed significantly poor performance. The results indicated that MMPC FT had better control performance for compressors 1–3 while, for compressor 4, MMPC S&C performed better (Figure 13 and Table 19). Meanwhile, the MMPC FT steam reformer unit showed better control performance (Figure 14 and Table 20).
4. Conclusions
MMPC FT with the MIMO 1 model presented T, P, and M values of 1, 341, and 121, for the compressor unit, respectively; and 1, 45, and 21 for the steam reformer unit, respectively. These results demonstrated its better performance over the MPC and MMPC S&C, as well as MMPC and MIMO 2 models. The improvement in control performance of the MMPC FT with the MIMO 1 model in the SP change test on compressor unit 1 was 85.84% for compressor 1, 61.39% for compressor 2, 94.57% for compressor 3, and 73.35% for compressor 4 (or about 61%–95%), whereas, for the steam reformer unit, the MMPC FT performance increases were 63.34% for the heater and 71.36% for the combustor. The same trend was observed in the disturbance change test. Therefore, MMPC produced better control performance.
Author Contributions
Conceptualization, A.W.; methodology, M.A.; validation, A.W.; formal analysis, M.A.; resources, A.W.; data curation, M.A.; writing—original draft preparation, M.A.; writing—review and editing, M.A.; visualization, M.A.; supervision, A.W.; project administration, M.A.; funding acquisition, A.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable. The study did not involve humans or animals.
Informed Consent Statement
Not applicable. The study did not involve humans or animals.
Data Availability Statement
Publicly available datasets were analyzed in this study. This data can be found here: https://drive.google.com/drive/folders/1BKFaw897C7QsDyIhveDHcs5MK41JeZOv?usp=sharing (accessed on 20 September 2022).
Acknowledgments
We express our gratitude to the Universitas Indonesia which has funded this research through the scheme of Hibah Publikasi Terindeks Internasional (PUTI) Q2 No. NKB-676/UN2.RST/HKP.05.00/2022.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Setyawan, H. Hidrogen Sebagai Sistem Energi Masa Depan. Available online: https://elkimkor.com/2020/08/09/hidrogen-sebagai-sistem-energi-masa-depan/ (accessed on 23 September 2022).
- U.S. Energy Information Administration. Production of Hydrogen. Available online: https://www.eia.gov/energyexplained/hydrogen/production-of-hydrogen.php (accessed on 23 September 2022).
- Hermiati, E. Pengembangan Teknologi Konversi Biomassa Menjadi Bioetanol dan Bioproduk Sebagai Substitusi Produk Berbahan Baku Fosil; LIPI Press: Jakarta, Indonesia, 2019; ISBN 978-602-496-101-5. [Google Scholar]
- Budianta, I.A.; Abqari, F.; Cicilia; Andri; Gerry. Pabrik Bio-Hidrogen dari Biomasa; Universitas Indonesia, Department of Chemical Engineering of Universitas: Jakarta, Indonesia, 2011. [Google Scholar]
- Cortinovis, A.; Pareschi, D.; Mercangoez, M.; Besselmann, T. Model Predictive Anti-Surge Control of Centrifugal Compressors with Variable-Speed Drives. IFAC Proc. Vol. 2012, 45, 251–256. [Google Scholar] [CrossRef] [Green Version]
- Giraldo, S.A.C.; Supelano, R.C.; d’Avila, T.C.; Capron, B.D.O.; Ribeiro, L.D.; Campos, M.M.; Secchi, A.R. Model Predictive Control with Dead-Time Compensation Applied to a Gas Compression System. J. Pet. Sci. Eng. 2021, 203, 108580. [Google Scholar] [CrossRef]
- Kurz, R.; Brun, K. Process Control for Compression Systems. J. Eng. Gas Turbines Power 2018, 140, 022401. [Google Scholar] [CrossRef]
- Zanoli, S.M.; Orlietti, L. Steam Reforming Plant Optimization with Model Predictive Control. In Proceedings of the 2013 IEEE 18th Conference on Emerging Technologies & Factory Automation (ETFA), Cagliari, Italy, 10–13 September 2013; pp. 1–8. [Google Scholar]
- Vernon, D.; Erickson, P.; Liao, C.; Hsu, J.; Tang, H. Implications of Sensor Location in Steam Reformer Temperature Control. Int. J. Hydrogen Energy 2009, 34, 877–887. [Google Scholar] [CrossRef]
- Wang, J.; Wei, S.; Wang, Q.; Sundén, B. Transient Numerical Modeling and Model Predictive Control of an Industrial-Scale Steam Methane Reforming Reactor. Int. J. Hydrogen Energy 2021, 46, 15241–15256. [Google Scholar] [CrossRef]
- Ipsakis, D.; Damartzis, T.; Papadopoulou, S.; Voutetakis, S. Dynamic Modeling and Control of a Coupled Reforming/Combustor System for the Production of H2 via Hydrocarbon-Based Fuels. Processes 2020, 8, 1243. [Google Scholar] [CrossRef]
- Wahid, A.; Taqwallah, H.M.H. Model Predictive Control Based on System Re-Identification (MPC-SRI) to Control Bio-H 2 Production from Biomass. IOP Conf. Ser. Mater. Sci. Eng. 2018, 316, 012061. [Google Scholar] [CrossRef]
- Ashraf, M.S.; Sajjad, M.U.; Haider, F.; Hannan, S.; Aslam, S.; Hamza, M. Model Predictive Control Implementation for MIMO System in Presence of Soft Constraints and Non-Linear Disturbance. In Proceedings of the 2020 International Conference on Electrical, Communication, and Computer Engineering (ICECCE), Istanbul, Turkey, 12–13 June 2020; pp. 1–6. [Google Scholar]
- Taipabu, M.I.; Viswanathan, K.; Wu, W.; Hattu, N.; Atabani, A.E. A Critical Review of the Hydrogen Production from Biomass-Based Feedstocks: Challenge, Solution, and Future Prospect. Process Saf. Environ. Prot. 2022, 164, 384–407. [Google Scholar] [CrossRef]
- Hydrogen Production: Natural Gas Reforming. Available online: https://www.energy.gov/eere/fuelcells/hydrogen-production-natural-gas-reforming (accessed on 10 November 2022).
- Marlin, T.E. Process Control: Designing Processes and Control Systems for Dynamic Performance; McGraw-Hill Chemical Engineering Series, 2nd ed.; McGraw-Hill: Singapore, 2000; ISBN 0-07-039362-1. [Google Scholar]
- Shridhar, R.; Cooper, D.J. A Novel Tuning Strategy for Multivariable Model Predictive Control. ISA Trans. 1997, 36, 273–280. [Google Scholar] [CrossRef]
Figure 1.
Research flowchart.

Figure 2.
Process Flow diagram of compressor and steam reformer units in a biohydrogen plant.

Figure 3.
Comparison of controller performance with SP changes on the compressor unit 1 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 3.
Comparison of controller performance with SP changes on the compressor unit 1 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 4.
Comparison of controller performance with SP changes on compressor unit 2 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 4.
Comparison of controller performance with SP changes on compressor unit 2 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 5.
Comparison of controller performance with SP changes on compressor unit 3 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 5.
Comparison of controller performance with SP changes on compressor unit 3 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 6.
Comparison of controller performance with SP changes on compressor unit 4 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 6.
Comparison of controller performance with SP changes on compressor unit 4 (MIMO Model 1) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 7.
Comparison of controller performance with SP changes on compressor unit 1 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 7.
Comparison of controller performance with SP changes on compressor unit 1 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 8.
Comparison of controller performance with SP changes on compressor unit 2 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 8.
Comparison of controller performance with SP changes on compressor unit 2 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 9.
Comparison of controller performance with SP changes on compressor unit 3 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 9.
Comparison of controller performance with SP changes on compressor unit 3 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 10.
Comparison of controller performance with SP changes on compressor unit 4 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.
Figure 10.
Comparison of controller performance with SP changes on compressor unit 4 (MIMO Model 2) on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4.

Figure 11.
Comparison of the controller performance with SP change on the heater on: (a) the heater; and (b) the combustor.
Figure 11.
Comparison of the controller performance with SP change on the heater on: (a) the heater; and (b) the combustor.

Figure 12.
Comparison of controller performance with SP change on the combustor on: (a) the heater and (b) the combustor with SP change.
Figure 12.
Comparison of controller performance with SP change on the combustor on: (a) the heater and (b) the combustor with SP change.

Figure 13.
Controller performance on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4 (Disturbance Test).
Figure 13.
Controller performance on: (a) compressor unit 1; (b) compressor unit 2; (c) compressor unit 3; and (d) compressor unit 4 (Disturbance Test).

Figure 14.
Controller performance on: (a) the heater and (b) the combustor (Disturbance Test).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Inlet and outlet pressure in the compressor units.
| Pressure (kPa) | Compressor Unit 1 | Compressor Unit 2 | Compressor Unit 3 | Compressor Unit 4 |
|---|---|---|---|---|
| Input | 155.25 | 339.17 | 719.6 | 1563 |
| Output | 356 | 740 | 1577 | 3172 |
Table 2.
FOPDT parameters from previous research.
| FOPDT Parameters | Compressor Unit 1 | Compressor Unit 2 | Compressor Unit 3 | Compressor Unit 4 | Heater | Combustor |
|---|---|---|---|---|---|---|
| Kp | −0.1477 | −0.1562 | −0.7006 | −0.6984 | 3.4018 | 0.3128 |
| τp (s) | 6.2583 | 6.9723 | 1.5563 | 1.002 | 0.51 | 2.0025 |
| θ (s) | 1.0863 | 1.2743 | 0.8168 | 1.1697 | 0.33 | 0.165 |
Table 3.
MPC control parameters from previous research.
| MMPC Specification | T (s) | P | M |
|---|---|---|---|
| Compressor Unit 1 | 30 | 20 | 3 |
| Compressor Unit 2 | 30 | 25 | 2 |
| Compressor Unit 3 | 30 | 41 | 10 |
| Compressor Unit 4 | 10 | 40 | 5 |
| Steam Reformer Unit (Heater) | 20 | 50 | 4 |
Table 4.
Variable Identification.
| Unit | Controlled | Manipulated | Disturbance |
|---|---|---|---|
| Compressor | Pressure (kPa) | Flow rate (kg/s) | Feed flow rate (kg/s) |
| Steam Reformer | Temperature (°C) | Heater energy flow (kJ/h) | Feed temperature (°C) |
Table 5.
MMPC parameters on the compression unit.
| MMPC Specification | MIMO Model 1 | MIMO Model 2 | ||||
|---|---|---|---|---|---|---|
| T (s) | P | M | T (s) | P | M | |
| Shridhar and Cooper | 1 | 181 | 61 | 1 | 322 | 108 |
| Fine tuning | 1 | 341 | 121 | 1 | 341 | 121 |
Table 6.
MMPC parameters on the steam reformer unit.
| MMPC Parameters | T (s) | P | M |
|---|---|---|---|
| Shridhar and Cooper | 1 | 61 | 21 |
| Fine tuning | 1 | 45 | 21 |
Table 7.
Comparison of IAE and ISE on compressor units with changes on compressor unit 1 (MIMO Model 1).
Table 7.
Comparison of IAE and ISE on compressor units with changes on compressor unit 1 (MIMO Model 1).
| CV | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 6.38 × 102 | 9.07 × 10¹ | 9.04 × 10¹ | 85.80 | 85.84 |
| ISE | 3.06 × 103 | 3.49 × 102 | 3.48 × 102 | 88.61 | 88.64 | |
| Compressor Unit 2 | IAE | 8.40 × 102 | 2.37 × 102 | 2.37 × 102 | 71.78 | 71.78 |
| ISE | 3.47 × 103 | 1.47 × 103 | 1.47 × 103 | 57.58 | 57.47 | |
| Compressor Unit 3 | IAE | 2.96 × 103 | 1.54 × 102 | 1.53 × 102 | 94.78 | 94.84 |
| ISE | 2.65 × 104 | 8.14 × 102 | 8.02 × 102 | 96.93 | 96.98 | |
| Compressor Unit 4 | IAE | 9.88 × 101 | 4.61 × 10⁰ | 4.64 × 10⁰ | 95.33 | 95.30 |
| ISE | 2.53 × 101 | 2.20 × 10⁻¹ | 2.29 × 10⁻¹ | 99.13 | 99.10 | |
Table 8.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 2 (MIMO Model 1).
Table 8.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 2 (MIMO Model 1).
| CV | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 4.45 × 102 | 2.63 × 10¹ | 2.65 × 10¹ | 94.09 | 94.05 |
| ISE | 3.73 × 102 | 6.59 × 100 | 6.70 × 100 | 98.23 | 98.20 | |
| Compressor Unit 2 | IAE | 6.18 × 102 | 2.39 × 102 | 2.39 × 102 | 61.37 | 61.39 |
| ISE | 2.53 × 103 | 6.00 × 102 | 6.00 × 102 | 76.31 | 76.31 | |
| Compressor Unit 3 | IAE | 1.04 × 103 | 1.18 × 102 | 1.17 × 102 | 88.72 | 88.76 |
| ISE | 1.21 × 103 | 8.98 × 10¹ | 8.91 × 10¹ | 92.58 | 92.64 | |
| Compressor Unit 4 | IAE | 2.30 × 10¹ | 5.27 × 100 | 5.23 × 100 | 77.12 | 77.29 |
| ISE | 9.62 × 10⁻¹ | 1.16 × 10⁻¹ | 1.15 × 10⁻¹ | 87.96 | 88.04 | |
Table 9.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 3 (MIMO Model 1).
Table 9.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 3 (MIMO Model 1).
| CV | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 4.38 × 10¹ | 2.26 × 10¹ | 2.24 × 10¹ | 48.52 | 48.82 |
| ISE | 1.77 × 100 | 8.14 × 100 | 7.99 × 100 | 359.36 | 351.20 | |
| Compressor Unit 2 | IAE | 3.54 × 102 | 3.46 × 10¹ | 3.45 × 10¹ | 90.21 | 90.27 |
| ISE | 1.48 × 102 | 9.50 × 100 | 9.43 × 100 | 93.56 | 93.61 | |
| Compressor Unit 3 | IAE | 2.22 × 103 | 1.21 × 102 | 1.21 × 102 | 94.54 | 94.57 |
| ISE | 9.44 × 103 | 4.23 × 102 | 4.21 × 102 | 95.51 | 95.54 | |
| Compressor Unit 4 | IAE | 3.00 × 10⁻2 | 2.33 × 10¹ | 2.32 × 10¹ | −7.74 × 104 | −7.73 × 104 |
| ISE | 3.00 × 10⁻⁴ | 5.96 × 100 | 5.95 × 100 | −1.99 × 106 | −1.98 × 106 | |
Table 10.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 4 (MIMO Model 1).
Table 10.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 4 (MIMO Model 1).
| CV | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 3.41 × 10¹ | 6.95 × 10¹ | 6.98 × 10¹ | −103.81 | −104.57 |
| ISE | 1.50 × 100 | 1.07 × 10¹ | 1.08 × 10¹ | −616.55 | −618.56 | |
| Compressor Unit 2 | IAE | 2.15 × 102 | 3.01 × 10¹ | 3.02 × 10¹ | 85.98 | 85.95 |
| ISE | 4.18 × 10¹ | 3.03 × 100 | 3.06 × 100 | 92.76 | 92.67 | |
| Compressor Unit 3 | IAE | 5.38 × 103 | 1.83 × 102 | 1.83 × 102 | 96.60 | 96.61 |
| ISE | 6.48 × 103 | 7.64 × 10¹ | 7.66 × 10¹ | 98.82 | 98.82 | |
| Compressor Unit 4 | IAE | 7.75 × 102 | 2.06 × 102 | 2.07 × 102 | 73.44 | 73.35 |
| ISE | 3.11 × 103 | 6.24 × 102 | 6.24 × 102 | 79.97 | 79.96 | |
Table 11.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 1 (MIMO Model 2).
Table 11.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 1 (MIMO Model 2).
| CV | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 6.38 × 102 | 7.51 × 10¹ | 8.20 × 10¹ | 88.23 | 87.15 |
| ISE | 3.06 × 103 | 2.24 × 102 | 2.72 × 102 | 92.69 | 91.11 | |
| Compressor Unit 2 | IAE | 8.40 × 102 | 2.37 × 102 | 2.37 × 102 | 71.78 | 71.78 |
| ISE | 3.47 × 103 | 1.47 × 103 | 1.47 × 103 | 57.58 | 57.47 | |
| Compressor Unit 3 | IAE | 2.96 × 103 | 1.54 × 102 | 1.53 × 102 | 94.78 | 94.84 |
| ISE | 2.65 × 10⁴ | 8.14 × 102 | 8.02 × 102 | 96.93 | 96.98 | |
| Compressor Unit 4 | IAE | 9.88 × 10¹ | 4.61 × 10⁰ | 4.64 × 10⁰ | 95.33 | 95.30 |
| ISE | 2.53 × 10¹ | 2.20 × 10⁻¹ | 2.29 × 10⁻¹ | 99.13 | 99.10 | |
Table 12.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 2 (MIMO Model 2).
Table 12.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 2 (MIMO Model 2).
| CV | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 4.45 × 102 | 2.60 × 101 | 2.60 × 101 | 94.15 | 94.15 |
| ISE | 3.73 × 102 | 4.01 × 100 | 4.01 × 100 | 98.92 | 98.92 | |
| Compressor Unit 2 | IAE | 6.18 × 102 | 2.58 × 102 | 2.58 × 102 | 58.22 | 58.22 |
| ISE | 2.53 × 103 | 6.89 × 102 | 6.89 × 102 | 72.81 | 72.81 | |
| Compressor Unit 3 | IAE | 1.04 × 103 | 1.03 × 102 | 1.03 × 102 | 90.16 | 90.17 |
| ISE | 1.21 × 103 | 6.32 × 101 | 6.31 × 101 | 94.78 | 94.79 | |
| Compressor Unit 4 | IAE | 2.30 × 101 | 1.31 × 100 | 1.31 × 100 | 94.31 | 94.31 |
| ISE | 9.62 × 10−1 | 2.99 × 10−2 | 2.99 × 10−2 | 96.89 | 96.89 | |
Table 13.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 3 (MIMO Model 2).
Table 13.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 3 (MIMO Model 2).
| CV | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | ||||
|---|---|---|---|---|---|---|
| Error | MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | |
| Compressor Unit 1 | IAE | 4.38 × 101 | 5.91 × 100 | 5.91 × 100 | 86.51 | 86.51 |
| ISE | 1.77 × 100 | 3.94 × 10−1 | 3.94 × 10−1 | 77.78 | 77.78 | |
| Compressor Unit 2 | IAE | 3.54 × 102 | 4.70 × 101 | 4.70 × 101 | 86.73 | 86.73 |
| ISE | 1.48 × 102 | 1.92 × 101 | 1.91 × 101 | 87.02 | 87.02 | |
| Compressor Unit 3 | IAE | 2.22 × 103 | 1.90 × 102 | 1.90 × 102 | 91.45 | 91.45 |
| ISE | 9.44 × 103 | 7.58 × 102 | 7.58 × 102 | 91.97 | 91.97 | |
| Compressor Unit 4 | IAE | 3.00 × 102 | 1.27 × 101 | 1.27 × 101 | −4.21 × 104 | −4.21 × 104 |
| ISE | 3.00 × 10−4 | 1.20 × 100 | 1.20 × 100 | −3.99 × 105 | −3.99 × 105 | |
Table 14.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 4 (MIMO Model 2).
Table 14.
Comparison of IAE and ISE on the compressor unit with changes on compressor unit 4 (MIMO Model 2).
| CV | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 3.41 × 101 | 3.06 × 101 | 3.06 × 101 | 10.33 | 10.33 |
| ISE | 1.50 × 100 | 1.45 × 100 | 1.45 × 100 | 3.14 | 3.14 | |
| Compressor Unit 2 | IAE | 2.15 × 102 | 4.75 × 101 | 4.75 × 101 | 77.89 | 77.89 |
| ISE | 4.18 × 101 | 3.72 × 100 | 3.72 × 100 | 91.10 | 91.10 | |
| Compressor Unit 3 | IAE | 5.38 × 103 | 4.37 × 102 | 4.37 × 102 | 91.89 | 91.89 |
| ISE | 6.48 × 103 | 3.16 × 102 | 3.16 × 102 | 95.13 | 95.13 | |
| Compressor Unit 4 | IAE | 7.75 × 102 | 2.58 × 102 | 2.58 × 102 | 66.71 | 66.71 |
| ISE | 3.11 × 103 | 8.75 × 102 | 8.75 × 102 | 71.90 | 71.90 | |
Table 15.
Comparison of IAE and ISE on the heater and combustor units due to changes in SP on the heater unit.
Table 15.
Comparison of IAE and ISE on the heater and combustor units due to changes in SP on the heater unit.
| CV | Error | IAE (°C∙s) and ISE ([°C]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Heater | IAE | 4.06 × 102 | 3.06 × 102 | 1.49 × 102 | 24.73 | 63.34 |
| ISE | 2.60 × 103 | 2.20 × 103 | 1.05 × 103 | 15.48 | 59.57 | |
| Combustor | IAE | 2.49 × 10⁰ | 2.50 × 10⁻¹ | 1.20 × 10⁻¹ | 89.96 | 95.18 |
| ISE | 6.52 × 10⁻2 | 8.00 × 10⁻⁴ | 2.00 × 10⁻⁴ | 98.77 | 99.69 | |
Table 16.
Comparison of IAE and ISE on the heater and combustor units due to changes in SP on the combustor unit.
Table 16.
Comparison of IAE and ISE on the heater and combustor units due to changes in SP on the combustor unit.
| CV | Error | IAE (°C∙s) and ISE ([°C]2∙s) | Improvement (%) | |||
|---|---|---|---|---|---|---|
| MPC | MMPC S&C | MMPC FT | MMPC S&C | MMPC FT | ||
| Heater | IAE | 2.49 × 10⁰ | 2.50 × 10⁻¹ | 1.20 × 10⁻¹ | 89.96 | 95.18 |
| ISE | 6.52 × 10⁻2 | 8.00 × 10⁻⁴ | 2.00 × 10⁻⁴ | 98.77 | 99.69 | |
| Combustor | IAE | 2.01 × 103 | 5.75 × 102 | 5.75 × 102 | 71.36 | 71.36 |
| ISE | 1.42 × 10⁴ | 2.81 × 103 | 2.81 × 103 | 80.16 | 80.16 | |
Table 17.
MMPC performance (IAE) and performance improvement in the compressor unit.
| MMPC Specification | IAE MPC (kPa∙s) | MMPC S&C MIMO Model 1 | MMPC FT MIMO Model 1 | MMPC S&C MIMO Model 2 | MMPC FT MIMO Model 2 | ||||
|---|---|---|---|---|---|---|---|---|---|
| IAE (kPa∙s) | Improvement (%) | IAE (kPa∙s) | Improvement (%) | IAE (kPa∙s) | Improvement (%) | IAE (kPa∙s) | Improvement (%) | ||
| Compressor unit 1 | 6.38 × 102 | 9.00 × 10¹ | 85.80 | 9.00 × 10¹ | 85.84 | 7.50 × 10¹ | 88.23 | 8.20 × 10¹ | 87.15 |
| Compressor unit 2 | 6.18 × 102 | 2.38 × 102 | 61.37 | 2.39 × 102 | 61.39 | 2.58 × 102 | 58.22 | 2.58 × 102 | 58.22 |
| Compressor unit 3 | 2.22 × 103 | 1.21 × 102 | 94.54 | 1.21 × 102 | 94.57 | 1.90 × 102 | 91.45 | 1.90 × 102 | 91.45 |
| Compressor unit 4 | 7.75 × 102 | 2.05 × 102 | 73.44 | 2.07 × 102 | 73.35 | 2.58 × 102 | 66.71 | 2.58 × 102 | 66.71 |
Table 18.
MMPC performance (IAE) and performance improvement in the steam reformer unit.
| MMPC Specification | IAE MPC (°C∙s) | MMPC S&C | MMPC FT | ||
|---|---|---|---|---|---|
| IAE (°C∙s) | Improvement (%) | IAE (°C∙s) | Improvement (%) | ||
| Heater | 4.06 × 102 | 3.05 × 102 | 24.73 | 1.48 × 102 | 63.34 |
| Combustor | 2.01 × 103 | 5.75 × 102 | 71.36 | 5.75 × 102 | 71.36 |
Table 19.
Comparison of controller performance on the compressor unit (Disturbance Test).
| Controlled Variable | Error | IAE (kPa∙s) and ISE ([kPa]2∙s) | |
|---|---|---|---|
| MMPC S&C | MMPC FT | ||
| Compressor Unit 1 | IAE | 3.09 × 102 | 1.92 × 102 |
| ISE | 1.81 × 103 | 9.46 × 102 | |
| Compressor Unit 2 | IAE | 6.25 × 102 | 3.77 × 102 |
| ISE | 6.83 × 103 | 2.52 × 103 | |
| Compressor Unit 3 | IAE | 5.81 × 102 | 5.83 × 102 |
| ISE | 6.04 × 103 | 6.07 × 103 | |
| Compressor Unit 4 | IAE | 2.94 × 10¹ | 2.02 × 10¹ |
| ISE | 1.74 × 10¹ | 7.71 × 10⁰ | |
Table 20.
Comparison of controller performance on the steam reformer unit (Disturbance Test).
| Controlled Variable | Error | IAE (°C∙s) and ISE ([°C]2∙s) | |
|---|---|---|---|
| MMPC S&C | MMPC FT | ||
| Combustor | IAE | 3.50 × 102 | 2.88 × 102 |
| ISE | 2.46 × 103 | 2.66 × 103 | |
| Heater | IAE | 1.42 × 10¹ | 1.42 × 10¹ |
| ISE | 1.42 × 10⁰ | 1.41 × 10⁰ | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Adjisetya, M.; Wahid, A. Multivariable Model Predictive Control to Control Bio-H2 Production from Biomass. ChemEngineering 2023, 7, 7. https://doi.org/10.3390/chemengineering7010007
AMA Style
Adjisetya M, Wahid A. Multivariable Model Predictive Control to Control Bio-H2 Production from Biomass. ChemEngineering. 2023; 7(1):7. https://doi.org/10.3390/chemengineering7010007
Chicago/Turabian StyleAdjisetya, Muhammad, and Abdul Wahid. 2023. "Multivariable Model Predictive Control to Control Bio-H2 Production from Biomass" ChemEngineering 7, no. 1: 7. https://doi.org/10.3390/chemengineering7010007