1. Introduction
As one of the largest industries in the world, the construction industry contains a vast variety of activities in the fields ranging from architecture, engineering, manufacturing, fabrication, to project management, inspection, and facility management. Despite being considered a technology non-intensive industry, it has been increasingly adopting new techniques and methods to improve the productivity and safety during the last decade, including the transition from 2D Computer-Aided Design (CAD) to 3D Building Information Modeling (BIM) and from the traditional manual operations to robotic-aided and automated workflows. Unmanned Aerial Vehicles (UAVs) is one of these innovative technologies and their uses in construction has considerably increased during the last few years due to their unparalleled efficiency over conventional methods [
1]. For example, construction professionals have implemented UAVs for various tasks such as inspection, surveying, safety, monitoring, etc. Among these UAV uses in construction, different types of imaging and sensing technologies have been implemented to obtain the geographical and surveying data under specific project conditions, such as red, green, and blue (RGB) color images, monochrome Lidar point clouds, and thermal imagery [
1,
2].
To better understand such uses of UAVs in construction and their technologies within the last few years, this paper presents the findings of a comprehensive literature review during the timeframe 2016 to 2021 including a total of 95 papers collected from a list of 21 relevant journals and conference proceedings. This paper summarizes the current results of UAV research in construction management, reviews the methodology, benefits, and limitations of each study identified; and, thus, provides valuable knowledge on the future research development of UAV applications in the civil, infrastructure, and construction industries.
The rest of this paper is organized as follows. The Background section briefly introduces the UAV sensing technologies, the different types of structures commonly inspected by UAVs, and the specific research topics on UAV uses and construction uses. The Data Collection section documents the selecting and collecting process of the reviewed literature, as well as the metadate of literature including year of publication and author region. The Results section presents an overview of the research topics, sensing technologies, and target structure types, and then reports the methodology, benefits, and limitations of each exemplary literature in detail. Finally, the Conclusions section summarizes the findings of all reviewed literature and provides recommendations for future research work.
2. Background
As technology has been advancing rapidly in the last decade, it has brought significant improvements in the payload capacity, flight duration, and affordability of small UAVs, which has made their use increasingly popular in broader surveying areas, such as agriculture, civil infrastructure, and disaster management [
1]. To act as a reliable partner and be better equipped for daily job challenges, UAVs have been integrated with different types of sensing, navigation, and monitoring systems, and the collected sensor data is integrated and analyzed with computer software for various types of tasks [
2].
UAV navigation relies on an integrated inertial measurement unit to provide precise measurements of position, velocity, and orientation at a high update rate for the flight control system [
1]. UAV sensing technologies are usually aerial photogrammetry and Lidar systems, and the typical workflow includes data collection flights, photogrammetry or point cloud processing, error prediction and reduction, and final product output [
2].
Image-based sensing, such as image cameras and video cameras, is the most common technology for general monitoring and tracking purposes [
2]. To meet the requirements of specific civil and construction tasks, a Lidar system or other active ranging technologies is usually needed to provide better accuracy, such as jobsite monitoring, infrastructure assessment, surface measurements and volume estimation, etc. [
1]. In addition, other general construction activities can also take advantage of the accurate UAV measurements, including surveying, infrastructure inspection, monitoring activities, and safety-related training, which cover a wide range of structure types including sitework, highways and roads, bridges and overpasses, dams, and other infrastructure facilities.
3. Data Collection
3.1. Collecting Method
While thousands of UAV-related research studies have been performed, only those directly contributing to construction applications are considered and included in this paper. The reviewed literature was collected from a selection of academic journals and conferences in the field of civil engineering and construction management that are most familiar and reputable in the U.S., including the following sources:
The American Society of Civil Engineers online library.
The Transportation Research Record online library.
Selected journals in the Elsevier online library ScienceDirect, including Automation in Construction.
Selected journals in the MDPI online library, including Drones and Remote Sensing.
Other independent academic publisher, such as Journal of Information Technology in Construction.
Online proceedings of leading academic conferences, including ASCE Construction Research Congress, ASCE International Conference on Computing in Civil Engineering, and Associated Schools of Construction Annual International Conference.
Keywords used in the online library search included UAV, UAS, drone, unmanned, and aerial vehicle. A manual screening was further performed to exclude articles not relevant to construction. Since this review focuses on the findings of recent studies, a publication timeframe of 2016–2021 was chosen for the journal papers due to their longer review cycle, and a timeframe of 2018–2021 was used for the conference proceedings considering the timeliness of conference publications.
3.2. Metadata of Literature
The 95 reviewed literature included 82 journal papers and 13 conference papers, as listed in
Table 1, where journal papers from Automation in Construction accounted for about a quarter of reviewed papers.
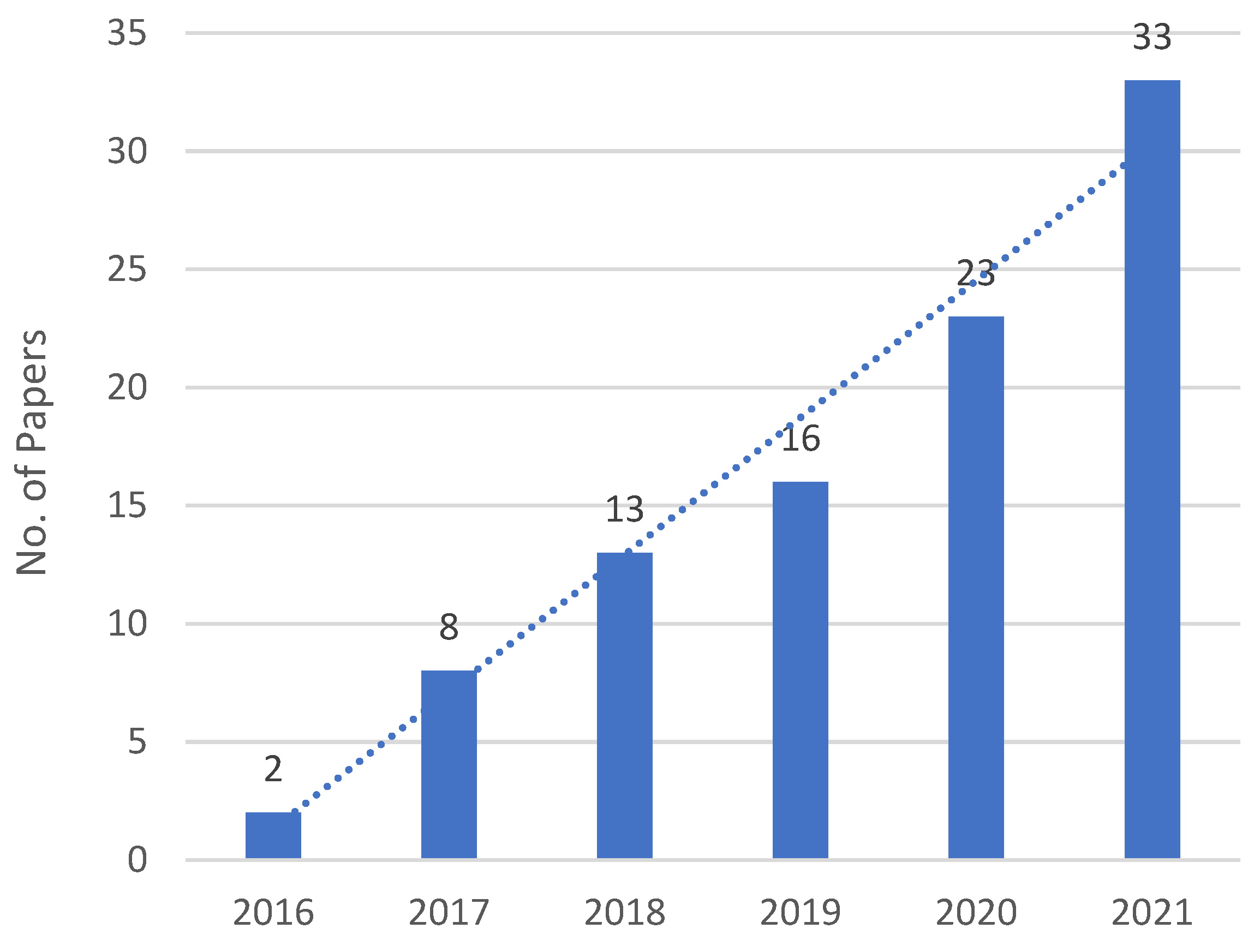
The year of publication and region of corresponding organization of reviewed literature were also analyzed. As demonstrated in
Figure 1, the number of paper publications had increased steadily since 2016, closely following a linear regression with an annual increment of roughly six.
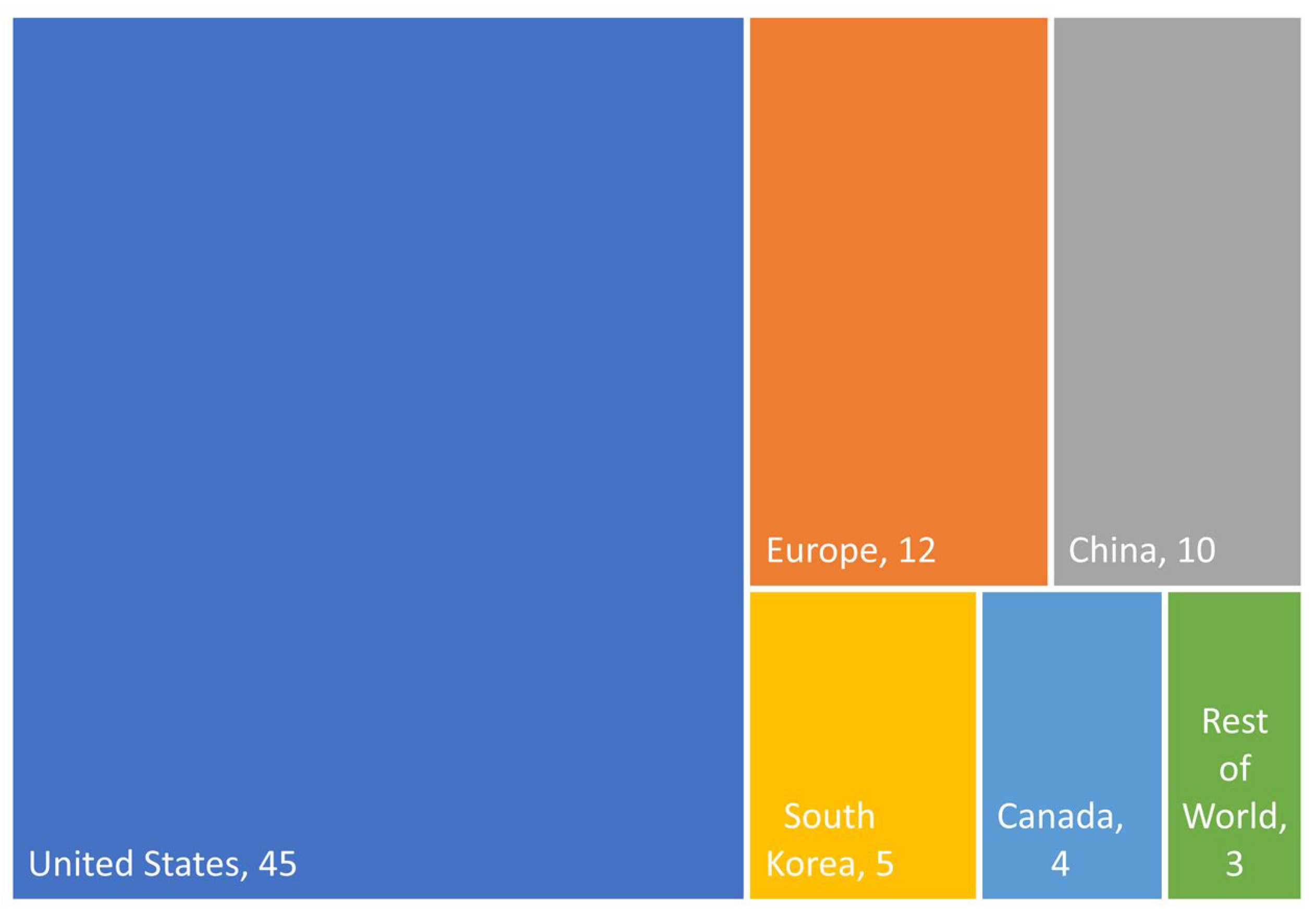
Figure 2 illustrates the distribution of regions of the reviewed literature. While about half of the studies were performed in the United States, around 12% and 10% were from Europe and China, respectively, and 5% were from Republic of Korea and Canada, respectively. The remaining studies were carried out in other countries including Australia, Saudi Arabia, and Singapore.
4. Results
4.1. Overview
All the reviewed papers were classified based on their main goals, which could be either for construction uses or UAV uses. Although the main topic of this paper is focused on direct construction uses, many of the reviewed studies investigated a particular aspect of UAV uses for construction activities, such as algorithms for aerial imaging processing, frameworks for carrying out construction tasks, the operations for performing construction tasks using a UAV, etc. As a result, literature of this type was classified into the category of UAV uses. In total, 65 papers on construction uses were identified and reviewed while 32 papers on UAV uses were reviewed. All the reviewed literature were then further categorized based on their sensing technology types and targeted structure types to illustrate the connection between the research topics, sensing technologies, and structure types. Since the scope of some studies were found to be very similar to each other among the 95 reviewed literature, the results of the exemplary 47 studies are summarized in this section.
4.1.1. Research Topics
The reviewed literature was grouped together based on their research topics in both the UAV and construction categories, as listed in
Table 2. In the category of UAV uses, about one third of the papers developed new algorithms for aerial imaging and point cloud processing, followed by a quarter of the papers on UAV applications and UAV operations for construction tasks, respectively. In the category of construction uses, over half of the literature focused on the topic of inspection while a third studied construction surveying with UAV. Research topics less focused on included UAV safety and training as well as construction monitoring and construction methods with UAV.
4.1.2. Sensing and Other Technologies
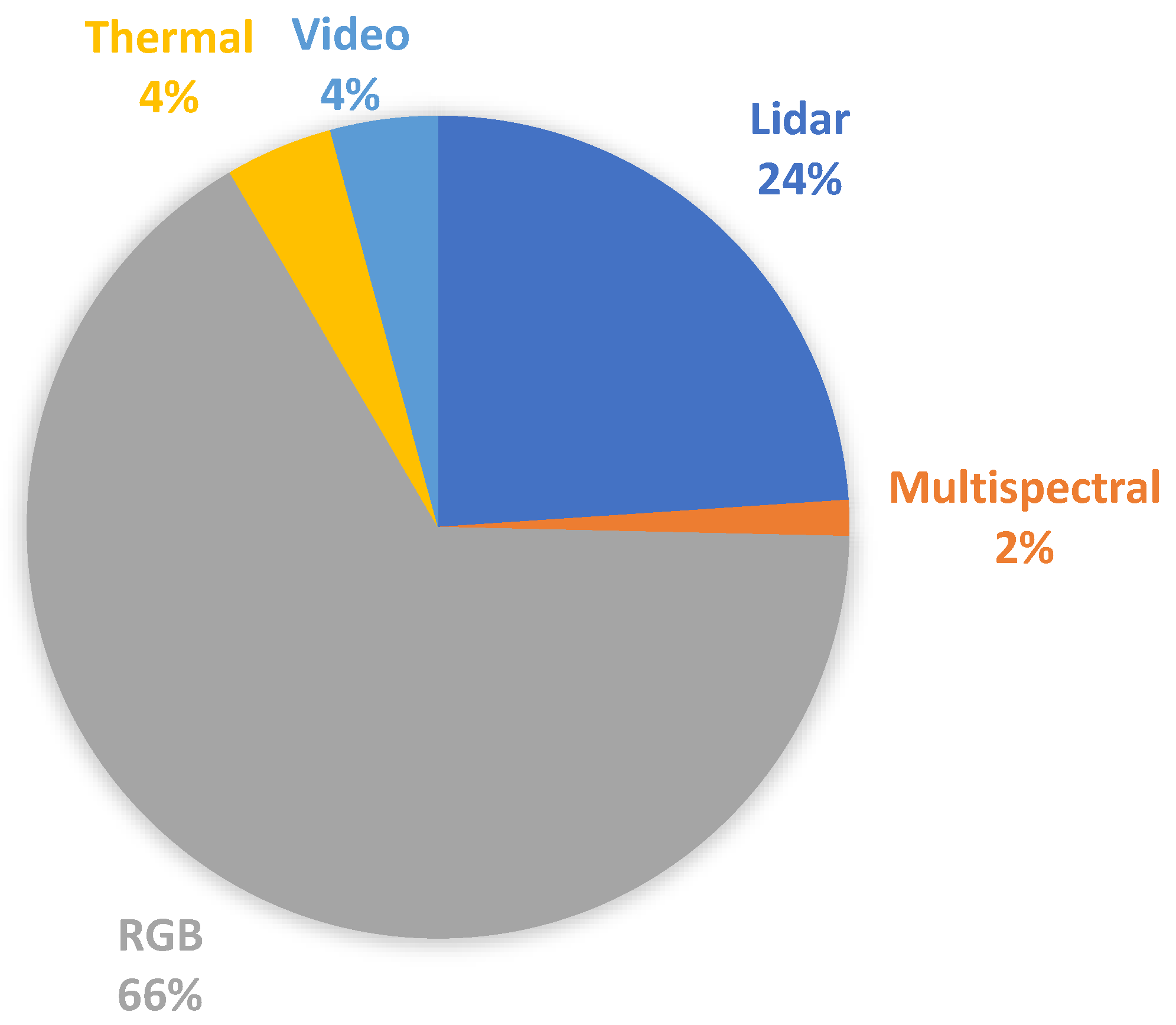
The reviewed was then categorized by the types of sensing technology applied, as illustrated in
Figure 3. Among the 71 publications which specified the sensor types, two-thirds applied RGB photogrammetry, indicating that color images were the dominant data type for UAVs. Around a quarter of the studies employed Lidar, suggesting that despite being more costly than imaging cameras, Lidar sensors were still a popular choice for research studies in the construction field. Other types of sensing technologies included thermal imaging, video footage, and multispectral images, accounting for one tenth combined. A few studies applied multiple types of sensors at the same time and were therefore included in each of the sensor categories.
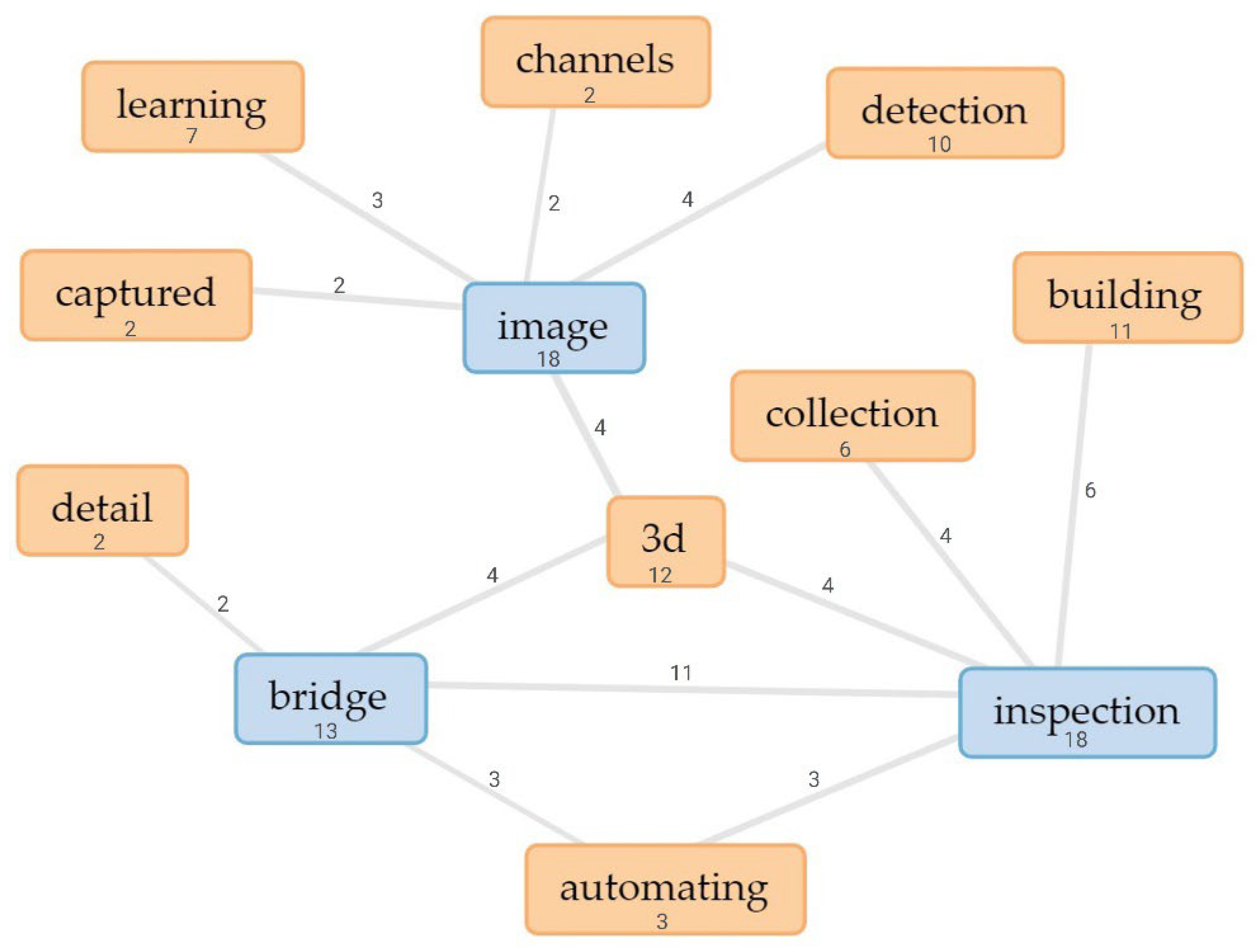
In addition to the sensing methods, other advanced technologies have also been applied together with UAVs, such as deep learning, neural network, Virtual Reality/Augmented Reality (VR/AR), and Unmanned Ground Vehicles (UGVs). The connections of these technologies in particular research topics suggested the optimal selection of research methods and equipment. By performing a text data mining of the title wording of the reviewed literature,
Figure 4 illustrates the typical connection links between the research topics, sensing methods, structure types, and other advanced technologies, along with the frequency of connection links. For example, images were frequently used for detection and deep learning, and inspection was typically an automated process for buildings. All of the most studied topics, including images, inspection, and bridges, were closely connected to 3D technologies.
4.1.3. Structure Types
In terms of targeted structure types studied by the reviewed literature, where 72 reviewed publications had specified, most of them had focused on site and buildings, accounting for 29% and 24%, respectively, followed by roads and bridges at 17% and 15%, respectively, as illustrated in
Figure 5. The remaining studied structure types included wetland, disaster, equipment, and dam, totaling a combined 15% of the reviewed literature.
Text data mining was performed again to provide a visual representation of the frequency of title wording of all reviewed literature. After removing the common words including UAV, aerial, unmanned, vehicle, drone, construction, and general words such as using, based, data, a cirrus of the most frequent 100 words in the titles of the reviewed literature is demonstrated in
Figure 6 to represent the popularity of the title wording. It can be observed that image, inspection, 3D, bridge, and building are the most frequently appearing words in the literature titles, followed by photogrammetry, monitoring, detection, automated, mapping, and deep learning. Other noticeable title wording also included assessment, framework, Lidar, point cloud, site, and road.
4.2. Research Topics on UAV Uses
A total of 32 papers were classified in the category of UAV uses for construction, including specific topics in the areas of algorithm, applications, operations, and framework. Very few papers were found on the topics of safety and training and therefore were discussed together later.
4.2.1. Algorithm
Research studies focusing on the topic of algorithm include various algorithm methods, data collection, and software. For example, Bang et al. [
3] proposed an approach to create a construction site panorama by applying an image stitching method of pre-processing. Additional studies are suggested to further this study to its full potentials. The mentioned limitations, such as information loss and misalignment, indicate a direction for future research studies. Kamari and Ham [
4] constructed a generative model using an unlabeled visual dataset and applied it to locate construction-relevant frames in a large visual dataset of jobsites. The contribution of this research was the ability to focus on selective visual data. Construction managers can reduce the time browsing large quantity of visual data; and, rather, focus on how to utilize the visual data to help decision-making in the constructed environments.
Ham and Kamari [
5] developed a new approach to automatically retrieve photo-worthy frames that contain construction-related contents, which were scattered in obtained video recordings or continuous images. The main contribution of this study was being able to automatically filter construction visual data and retrieve images valuable for as-built documentation of jobsites from video footage recorded via UAVs.
Chen et al. [
6] introduced a method assembling framework to segment a 3D photogrammetry point cloud into top-level terrain elements, such as vegetation, ground surface, and manmade objects. Pre-processing and post-processing methods were developed to overcome the challenges in data segmentation caused by photogrammetric issues in data quality. Liu et al. [
7] developed a deblurring model using a Generative Adversarial Network (GAN) network with deep learning. This approach was designed to achieve a deblurring of input crack images with zero kernels to enable the inspection of façade cracks. The model was developed with a discriminator sub-model connected to a generator sub-model.
Bang and Kim [
8] proposed a method to create time-spatial information as well as context-based visual information from UAV data. This method for creating context-based construction information built a database with considerations of time-spatial context and situational awareness, from UAV data with images and flight data at a construction site. Ham et al. [
9] utilized three state-of-the-art object detectors for vehicle detection, namely faster R-CNN, SSD, and R-FCN. The hyper-parameters of each detector were adjusted individually to achieve the optimal performance in vehicle detection. Random mixing of the images would not guarantee a high accuracy but instead indicated a reduction in overall performance when adding other environmental variables. Future research is recommended in more detailed contexts, such as night lighting conditions, complicated congestion crossings, and vehicle tracking.
Pi et al. [
10] contributed to the body of knowledge by demonstrating a fully annotated dataset with the different classes of objects, including people, vehicles, debris, boats, roads, vegetation, flooded areas, and damaged and undamaged building roofs. A convolutional neural networks (CNN) model was then developed to detect and segment critical objects within disaster sites from the aerial footage. Wang and Li [
11] proposed a blur detection method using datasets of crack images captured by UAV, and then classified the crack images based on visual information through metrics calculation and comparison with other EAWD values from the same dataset. The crack images were determined to be either blurred or not blurred.
Fu et al. [
12] optimized an object-based RF algorithm by using various iterations and then applied it for coarse classification. This new method was able to classify a karst vegetation community using UAV images, which provided technical support and theoretical reference for protecting and developing the Huixian karst wetland. Bianchi et al. [
13] presented a case study of a dataset model to detect critical structural details of a bridge, which provided context and vision to enhance the autonomous process of bridge inspection using UAVs. Four structural details were selected from the collected photos from this study, including bearings, gusset plates, cover plate terminations, and out-of-plane stiffeners.
4.2.2. Applications and Operations
Research studies focusing on UAV applications and operations are summarized here together in different aspects of on-site work, such as photography, monitoring, and site research. Irizarry and Costa [
14] showed a use case study to determine the possible applications of visual assets obtained from UAVs for construction management activities. The findings of his study were able to enhance the use of UAV-based visual assets for construction management activities and to determine potential opportunities to explore emerging technologies. Dupont et al. [
15] explored the capabilities of UAVs in connecting BIM to the real world to improve construction productivity. They identified challenges to achieve this goal, in two main areas, namely the robotic challenge and the software and civil engineering challenge.
Adjidjonu and Burgett [
16] developed an experiment to test the accuracy of the deployment of Phantom 4 Pro in a 1000-sf slightly-slope area. The use of one UAV was a limitation of the study since the different specifications of UAV cameras will produce different results. Albeaino et al. [
17] classified all Architecture, Engineering, and Construction (AEC) industry-related UAV applications in the past decade, which extended the understanding of the current status of UAV implementation in the AEC industries and previewed potential research trends in this domain. The methodology was focused on a structured review which summarized topic-specific research studies in an objective, and comprehensive replicable, manner.
Albeaino and Gheisari [
18] explored the current status of UAV implementation in the construction industry from the professionals’ point of view. Three activities were performed to achieve the objectives of this study, namely to develop a survey instrument, to distribute and collect data, and to screen and analyze data. Asadi and Han [
19] proposed a robotic system with a ground vehicle, two mobile robots, and an aerial micro blimp. The autonomous navigation system features the key aspects such as efficient path planning, ground and aerial robot localization, and surrounding environment mapping, etc.
Kim and Kim [
20] performed a tertiary study which consisted of three steps, which were selecting secondary review studies, quality assessment (QA) of the selected studies, and synthesize information based on tertiary review. This study contributed to the body of knowledge in terms of the applications UAVs and the current status of research on evidence-based tertiary reviews.
4.2.3. Framework
Various research studies have implemented different UAV frameworks. Zhou et al. [
21] explored a four-dimensional framework in lifecycle, managed objects, potential roles, and stakeholder engagement. The proposed framework offered a comprehensive schema from four dimensions that improve the understanding of UAV functions and the potential for construction management. This multidimensional framework was available to researchers and practitioners to further expand the dimensions and supplement the scenarios of UAV applications. Shojaei et al. [
22] explored the feasibility of using a low-cost small Unmanned Surface Vehicle (USV) as a stand-alone robotic agent and at the same time as a cooperative UAV agent. This study also provided a proof of concept for the development and applications of low-cost small USVs that were similar to the existing UAVs.
Park et al. [
23] proposed a framework for the automatic registration of point clouds by using 2D feature points from the images captured by UAVs and Unmanned Ground Vehicles (UGV). Field experiments conducted in this study applied various angles of the UAV camera to determine the optimal angle and capture sufficient points to match the UGV images. Kim et al. [
24] proposed a framework to inspect airfield runway design codes (RDCs) based on mosaic imagery. A fixed-wing UAV platform was developed to capture aerial images of an airport testbed. The results of validation indicated a high level of accuracy from the platform to measure pixel-based distances for RDC items, which were comparable to the results of manual inspections of the airfield.
4.3. Research Topics on Construction Uses
A total of 65 papers on construction uses were identified and reviewed, including topics on inspection and surveying. Very few papers were found on the topics of safety, monitoring, and methods and therefore were discussed together later.
4.3.1. Inspection
UAV uses in construction inspection have been the most implemented category in the reviewed literature. Zhou et al. [
25] grouped Hurricane Sandy photos to investigate image-based 3D reconstruction for post-hurricane damage assessment of residential buildings. One limitation of the research was that it was assumed that the images were grouped by individual buildings, which simplified the reconstruction process since buildings typically have similar local features. Omar and Nehdi [
26] investigated the potential applications of Infrared Thermography on UAV for detecting subsurface delamination of concrete bridge decks. This application did not require physical contact with the deck or bridge traffic interruption. The proposed approach also allowed post-processing of flight data.
Eschmann and Wundsam [
27] analyzed the interregional usage of UAVs for infrastructural inspection and structural health monitoring (SHM). A major issue of this study was the navigation of airborne sensors, which had accuracy issues due to factors such as the specifications of sensor hardware, varying atmospheric conditions, or infrastructure properties. Franke et al. [
28] presented the first documented use of small UAVs for reconnaissance tasks of seismic-induced soil liquefaction as well as lateral spread resulted from a major earthquake that happened in Chile in 2014. UAV remote sensing appeared to be able to provide a reasonable balance between the costs of acquisition and maintenance, portability, visibility, model resolution, and accuracy.
Seo et al. [
29] analyzed the effects of UAVs as a supplemental tool for bridge inspection. The photogrammetry software used in this study enabled a comprehensive and detailed view of the bridge damage. Using the UAV allowed the researchers to identify various types of bridge damage, such as corrosion, cracking, spalling, and moisture. Inzerillo et al. [
30] validated innovative and low-cost technologies for pavement analysis of roads and the assessment of their potential for enhancing the reliability and automatic detection of distress. The results from UAV-SfM are useful to illustrate the overall conditions of the status of a long road pavement stretch by identifying the key areas of the road surface, where it is required to perform more detailed analyses.
Duque et al. [
31] investigated the effects of UAV as a supplementary tool for the quantification of bridge damage. The UAV operations showed certain limitations caused mostly by adverse weather conditions, such as high speed of winds, limited lighting conditions, and image overexposure and underexposure. Dorafshan et al. [
32] studied the validity of using UAVs to detect fatigue cracks in bridges with fracture critical members (FCMs) by using visual inspection in both real time and post-flight. Two inspections of FCM structures with known fatigue cracks proved the capabilities of the UAVs in identifying fatigue cracks. Bashmal et al. [
33] developed a Siamese-GAN method to categorize cross-domains with aerial images. The main objective was to obtain data within two different domains, namely labeled source date and unlabeled target data.
Chen et al. [
34] proposed a systematic framework to detect and manage building anomalies based on aerial images. The framework defined a data structure, data flow, and related processing techniques, and the outcome proved the effectiveness of façade anomaly detection. Kim et al. [
35] developed a new framework to operate mobile robots that were equipped with a laser scanner with UAV aid in cluttered outdoor environments. Chen et al. [
36] presented an approach using an imagery-based point clouds for a procedure of bridge inspection, including the steps of data acquisition, 3D reconstruction, evaluation of data quality, and detection of subsequent damage.
Phillips and Narasimhan [
37] presented the challenges in automated data collection for visual bridge inspection, which were solved by using an autonomy framework with a ground-based robot. The inspection manager was developed to allow different sensors to be added to the inspection plans through the pair of action client/server. The navigation strategy can be applied to most UGVs, which will also meet the requirements of managing and executing the inspection plans. Elmekati et al. [
38] presented the use of aerial Lidar in evaluating the geotechnical conditions of the embankment that supports Chain O’Hills Road in Woodbridge, NJ. The framework allows the assessment of existing conditions and also predict the future system performance. Airborne Lidar technologies are proven to be effective in capturing data that record surface conditions for large-scale geotechnical systems.
Liu et al. [
39] proposed an augmented reality (AR) system by incorporating the workflow of UAV inspections with building information model (BIM). The approach was based on designing an algorithm workflow to connect BIM animations with UAV aerial videos.
4.3.2. Surveying
UAV uses in construction surveying has also been a popularly implemented category in the reviewed literature. Shang and Shen [
40] presented a pilot study using visual Simultaneous Localization and Mapping (SLAM) and UAVs for real-time 3D reconstruction of a construction site. The authors used the techniques in their methodology including earthwork measurement, construction progress management, and site asset tracking. Visual SLAM and UAVs were found to be more efficient tools for 3D reconstruction than photogrammetry on time-critical construction projects. Future studies should aim to overcome the limitations with sensor fusion techniques and reactive algorithms for UAV flight planning.
Asadi et al. [
41] designed a UAV-UGV system that integrated two custom-built mobile robots, including one ground-based robot and one aerial blimp. A Lidar sensor and a stereo image camera were used on the UGV to enable autonomous navigation, environment mapping, and localization. The UGV navigated toward pre-selected locations while being followed by the UAV based on vision techniques. Jiang and Bai [
42] presented the results of using drone-based-orthoimages to estimate elevations. They found that the technique was effective in construction operations despite the possible distortion parameters and the contrast between the analyzed models. Jiang and Bai [
43] also evaluated the effectiveness of Convolutional Neural Network (CNN) in surveying jobsites and the effects of strengthened CNNs to work with large-scale images of construction sites. For further research, they suggested increasing the accuracy of the elevation estimation using image segmentation or image classification.
Jiang et al. [
44] proposed a method to obtain elevation from surfaces with ground vegetation which does not allow accurate orthoimages and CNNs. This study obtained accurate results identifying the obstacles regardless of the ground points with small elevation gaps on the joints. Jiang and Bai [
45] further proposed a method to determine construction site elevations using automatic and accurate low-high pairs of drone orthoimages. Despite issues with the reflected rays, the image numbers and 3D reconstruction coverage were efficiently safe.
Martinez et al. [
46] studied the effects of single and dual frequency of post-processed kinematic (PPK) technology of the global navigation satellite system (GNSS) and its advantages in building surveying. The outcomes allowed the creation of a matrix that shows the accurate results of the techniques used. Future studies are recommended to evaluate projects with larger site areas and conduct accuracy assessment of point cloud data analyses based on RMSE calculations. Hou et al. [
47] studied the workflow of utilizing high-definition RGB images for accurately detecting tie points, the impact of different flight configurations on data fusion of tie points, and the performance improvements of tie point data fusion. The proposed data-fusion framework of tie point thermal and RGB images allowed for district-level thermal mapping. Further studies should select an appropriate flight altitudes higher than the tallest building in the mapping area, and the camera angles should depend on survey requirements.
4.4. Other Uses
Since few research studies were identified to focus on safety, monitoring, and training, they are summarized together here. Martinez et al. [
48] explored how UAV technology and aerial visual contents captured by UAVs might influence the current approaches of performing safety planning and monitoring construction sites of high-rise buildings in Chile. The study included the details of the procedures required in a high-rise building construction project to incorporate UAVs and their derived visual data based on the current process for safety planning and monitoring. The new procedures were related to designing and conducting UAV flights as well as collecting and processing visual data contents.
Xiao et al. [
49] explored using a UAV to capture videos of an excavation project for monitoring the stability of slopes at different stages of excavation operation. Based on different terrain points, selected surfaces were extracted and parameters of the surface plane were calculated to estimate the stability of slopes for the evolving excavation. This study demonstrated the feasibility of the developed approach and proved that a texture-rich 3D excavation model can be generated from drone images, and subsequently applied for quantitatively evaluation of the stability and safety of slopes.
5. Conclusions
The technology advancements in the flight time, payload capacity, and sensing instrument of UAVs in recent years have led to an increasing adoption of its uses in the architecture, engineering, and construction industries. While a variety of research activities have been carried out to test, validate, and enhance the use of UAVs in construction projects, a comprehensive review is needed to summarize the findings of current research of these uses. To provide a better understanding of such knowledge, this paper presents the findings of a literature review that focuses on UAV research in construction management during the timeframe of 2016 to 2021. A total of 95 papers were identified and collected from a list of 21 relevant journals and conference proceedings.
Based on the summative analysis of the reviewed literature, the following statements can be concluded:
The number of publications on UAV for construction has been growing steadily from 2016 to 2021 in the selected journals and conferences.
The United States is currently making major contributions in the field of UAVs research in construction management.
The majority of UAVs research in construction management have focused on construction inspection, construction surveying, image processing algorithms, and UAV applications and operations for construction tasks.
Color imaging is the dominant UAV data type, followed by Lidar point clouds, which combined consisted of 90% of the data collected by UAVs.
Most UAVs studies have focused on construction sites and buildings, followed by roads and bridges, which combined made up 85% of the construction projects employing UAVs.
Typical connection links have been identified between the research topics, sensing methods, structure types, and other advanced technologies utilized for UAVs research in construction management.
In addition, the methodology, benefits, and limitations of over forty reviewed literature were summarized in detail based on the category of their research topics, including UAS algorithm, applications, operations, framework, and training as well as construction inspection, surveying, safety, and monitoring. This paper summarizes the current results of UAV research in construction management and provides valuable knowledge for the future trend of UAV applications in the civil, infrastructure, and construction industries.
While this paper presents a comprehensive review on the recent research of general applications of UAV in construction management, it does not include in-depth reviews of task-specific studies, such as UAV measurement accuracy analysis, the comparison between the use of different types of sensing technologies, the effectiveness of UAV applications between different structure types, etc. In addition, future research should also focus on the emerging trend of the integration between UAV technologies, construction robotics, and Artificial Intelligence.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}