
A Comparative Review of Air Drones (UAVs) and Delivery Bots (SUGVs) for Automated Last Mile Home Delivery
Abstract
:1. Introduction
1.1. Research Questions
- What is the status quo of these two technologies’ applications in urban last mile delivery from a practice use perspective? (Section 2);
- What are the emerging delivery concepts of both technologies in the research literature? (Section 3);
- What are the key technical characteristics of both technologies? (Section 4);
- Which technology is more beneficial for commercial players? (Section 5);
- Which technology is more beneficial for the environment? (Section 6).
1.2. Methodological Approach
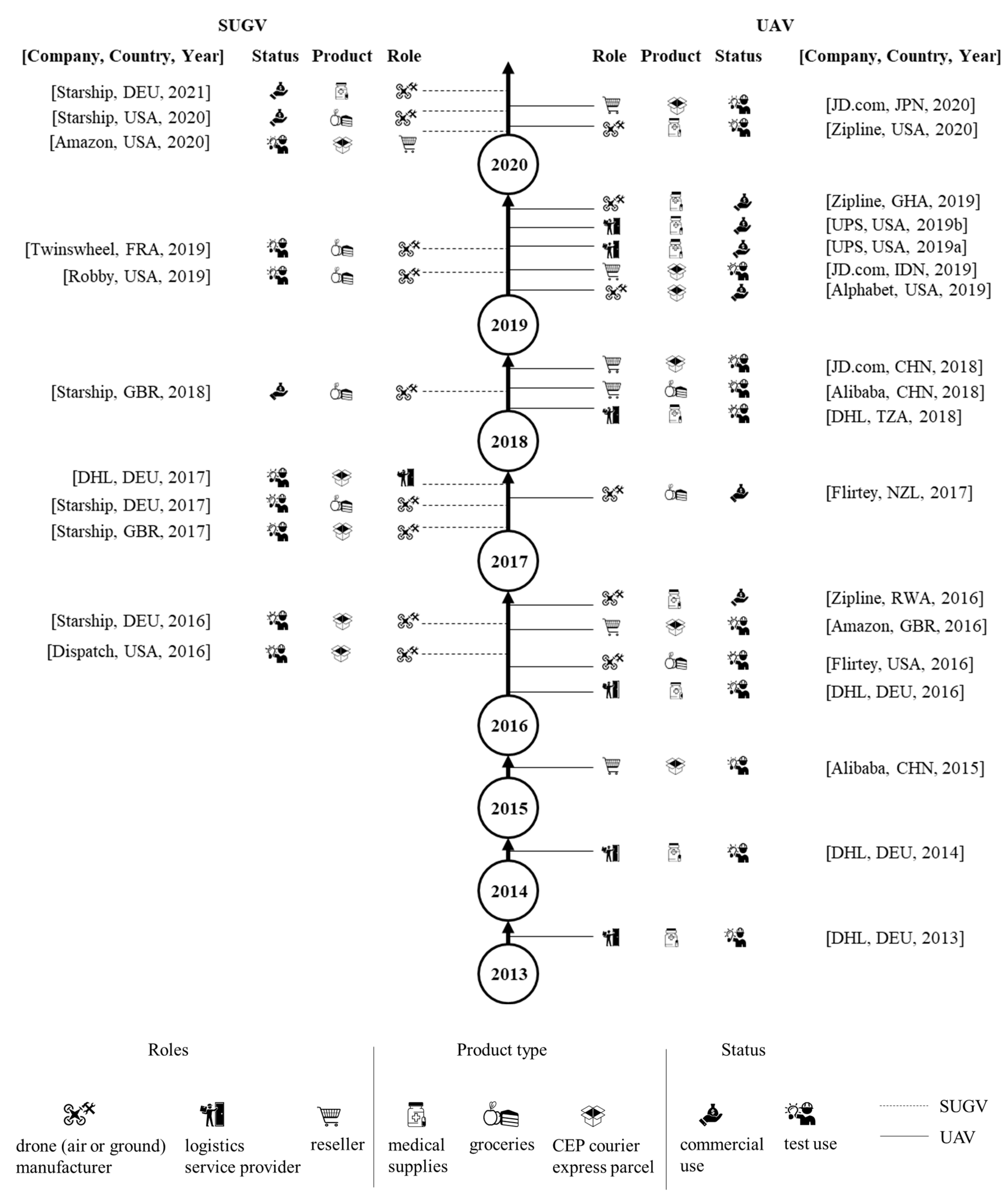
2. Intermediate Use Case Overview
2.1. UAV
2.2. SUGV
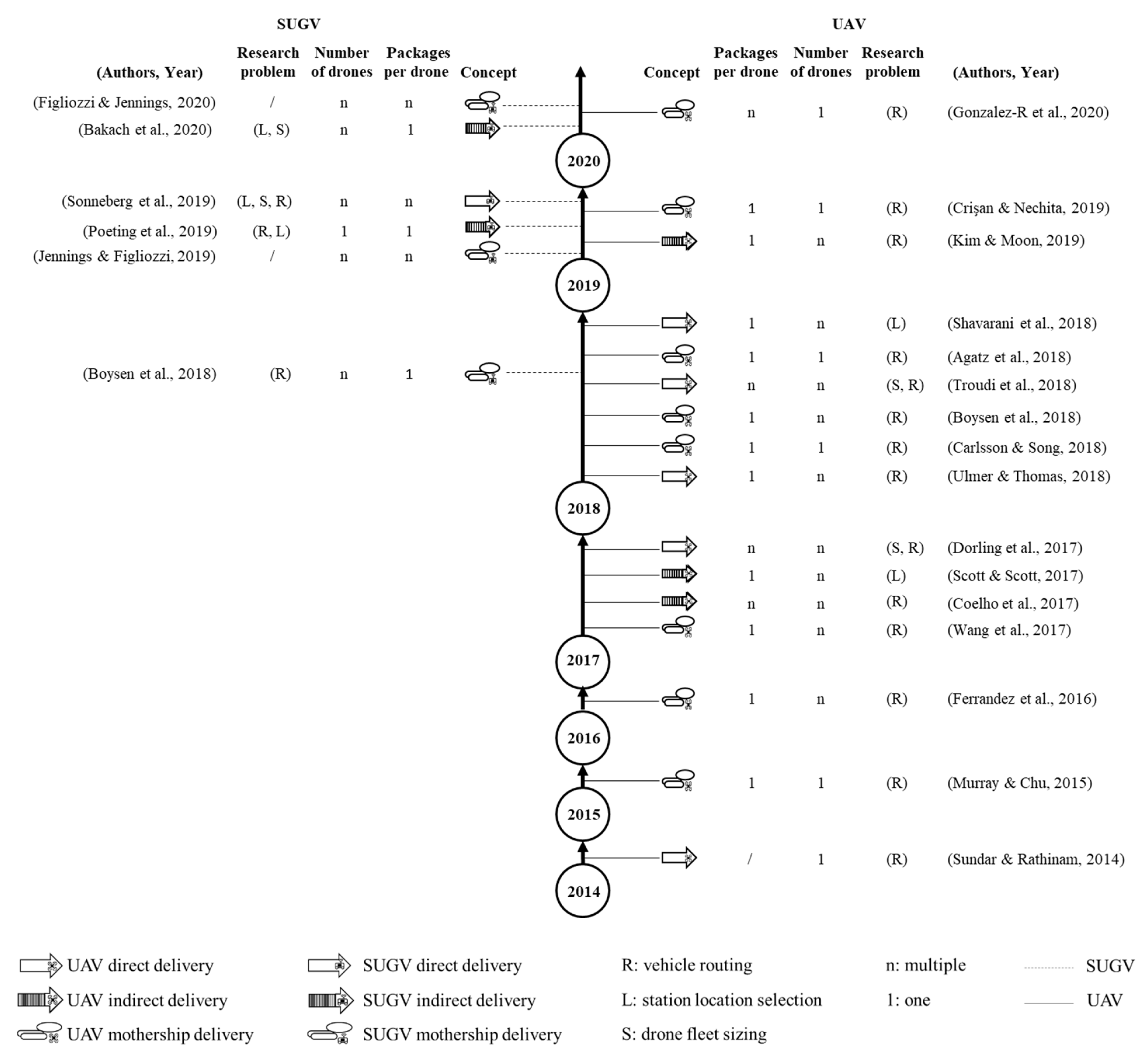
3. Drone Delivery Concept Overview
- direct delivery (drones deliver directly from depot to customer);
- indirect delivery (i.e., two-tier execution of last mile via local mini-hubs or cross-docking points);
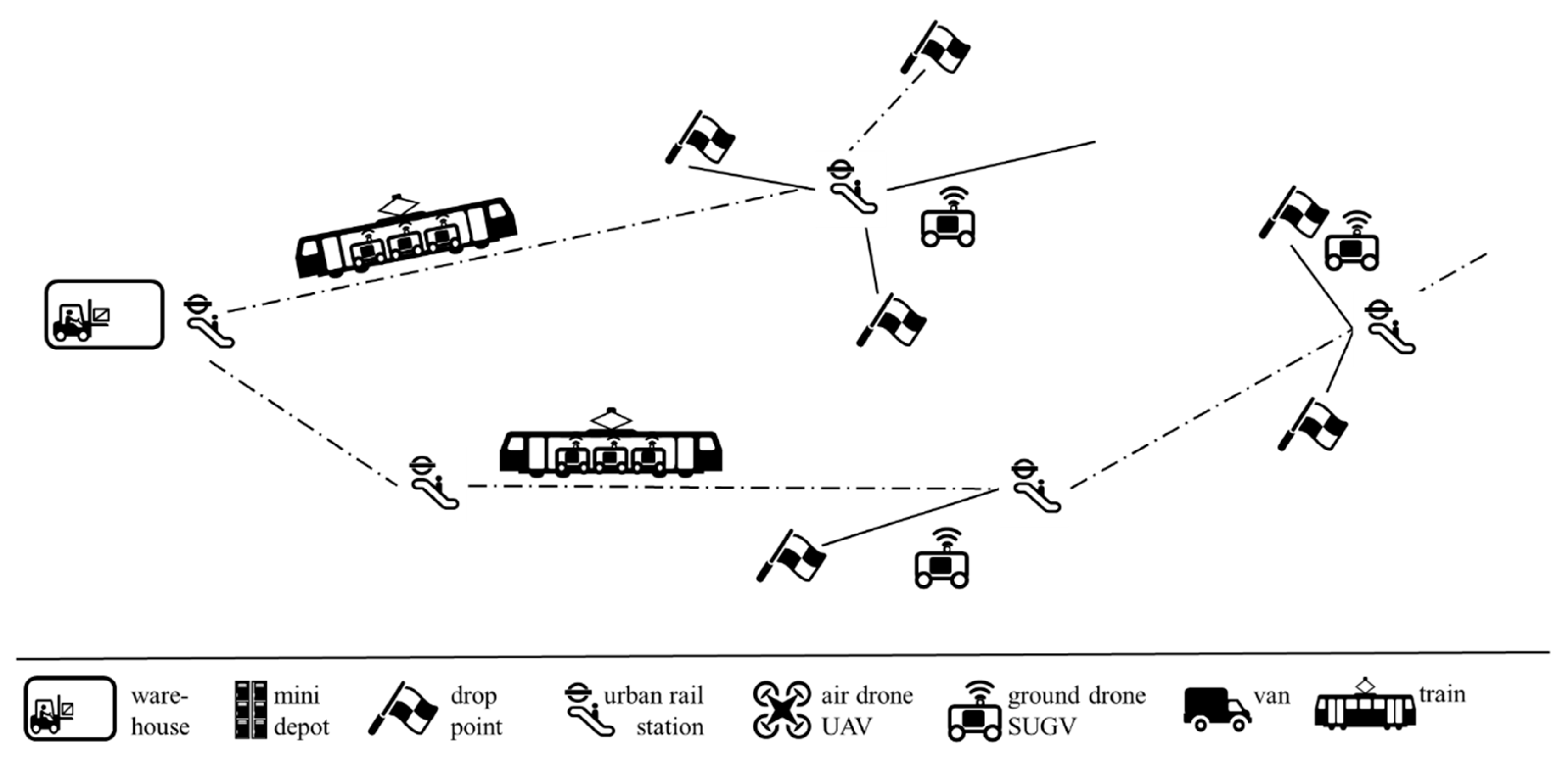
- mothership delivery (i.e., drones are partly carried by other means of transport toward their destination).
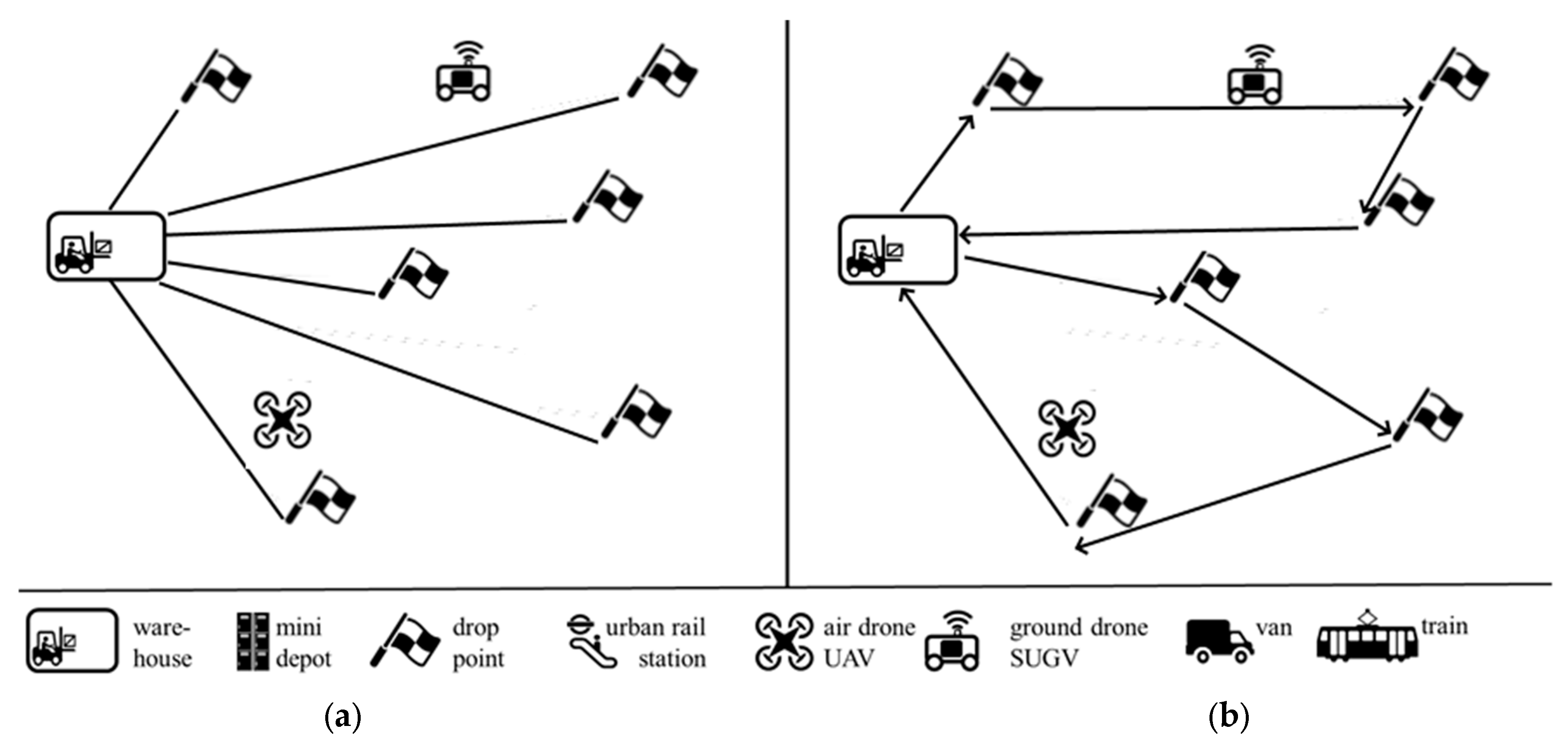
3.1. Direct Drone Delivery
3.1.1. UAV
3.1.2. SUGV
3.2. Indirect Drone Delivery (via Stationary Mini Hub)
3.2.1. UAV
3.2.2. SUGV
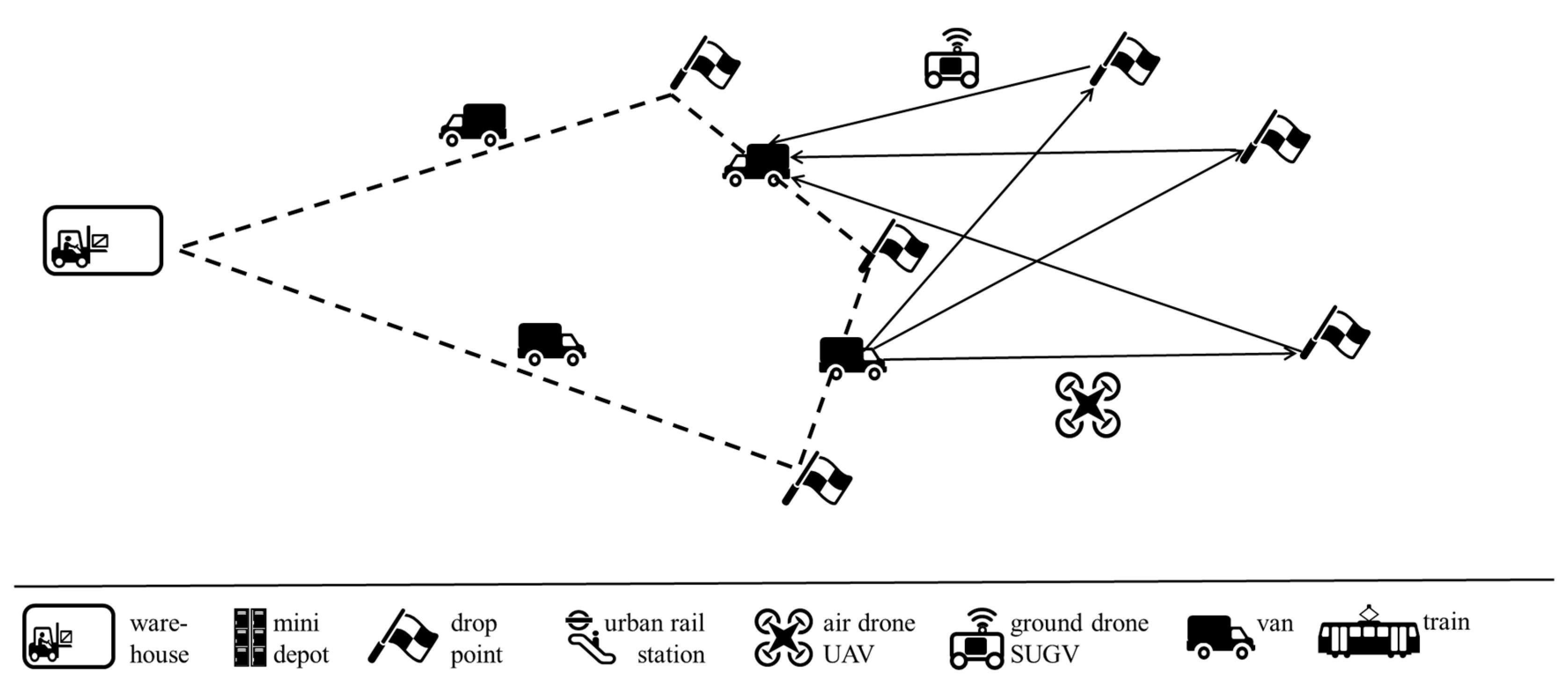
3.3. Mothership Drone Delivery (via Mobile Piggybag Carrier)
3.3.1. Drone Delivery via Drone Carrier Van
UAV
SUGV
3.3.2. SUGV Delivery via Public (Night) Transport
4. Technology Overview
4.1. UAV
4.2. SUGV
5. Commercial Assessment
5.1. Basic Assumptions
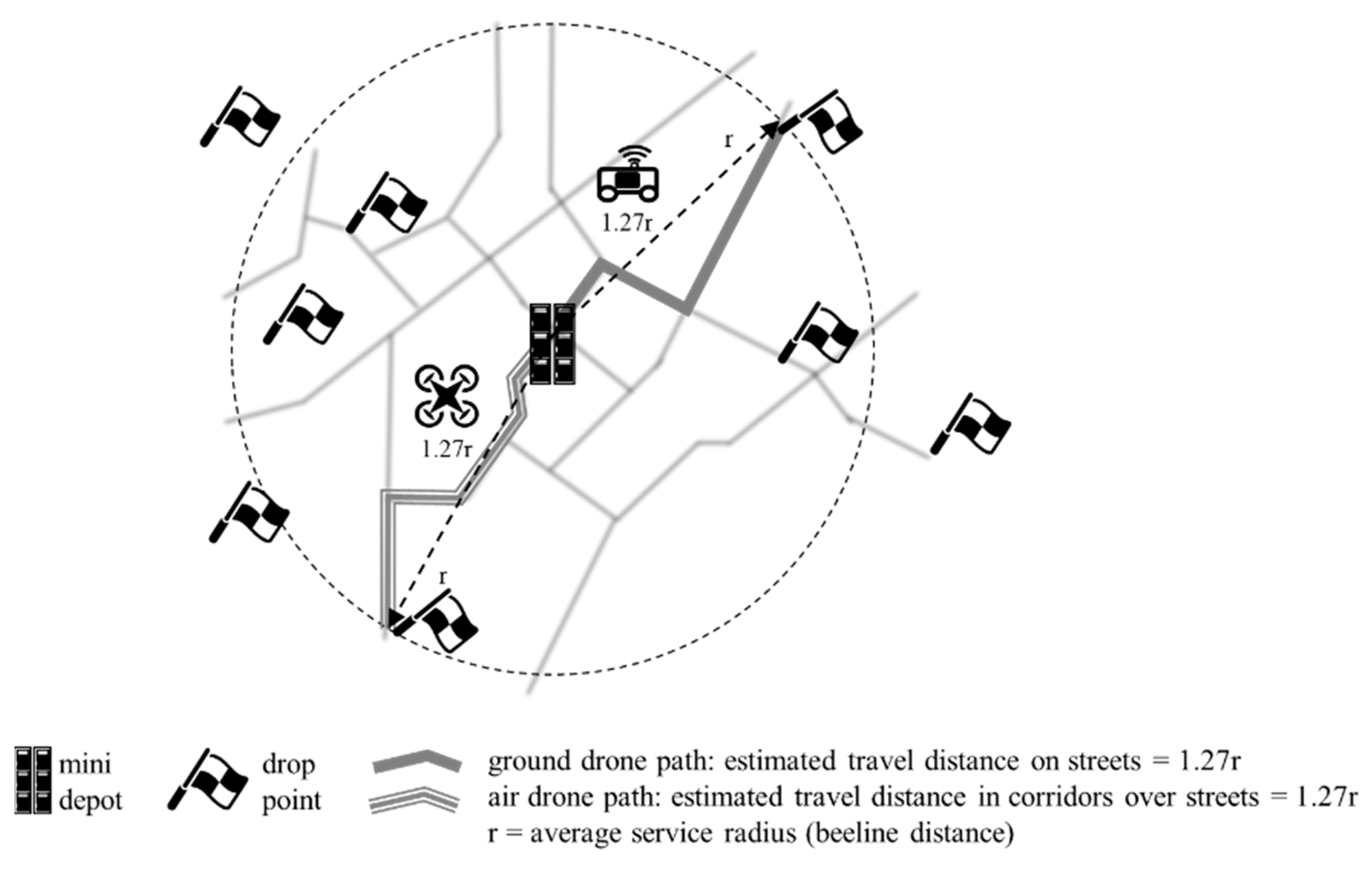
- Direct drone delivery between a mini-hub and customers (see Figure 3a);
- One package per shipment.
- Additionally, the following additional assumptions are made:
- One single drone as the basis for cost comparison (i.e., the number of needed drones, and the relevant investment volume are not considered in this cost calculus);
- Drones are used without interruptions except for battery replacement/recharging times (i.e., there are always enough shipments to be delivered, and no time windows of delivery are considered);
- Full battery for each delivery;
- Cargo handling costs at the mini-hub are neglected;
- Drones and batteries are linearly depreciated according to respective average lifetime mileages (i.e., we do not differentiate between fast and slow battery recharging schemes);
- Maintenance is conducted regularly to ensure high service quality; thus, maintenance costs are calculated per year;
- The average beeline distance between customers and the mini-hub is .
5.2. Cost Calculus Template
5.2.1. Parameter Definitions
5.2.2. Cost Calculus Template
- Vehicle cost per shipment (EUR): (the cost of the initial battery is deducted from the vehicle cost);
- Battery cost per shipment (EUR): ;
- Energy cost per shipment (EUR): (supposing the energy consumption rate is a comprehensive average of all flight phases including takeoff, cruising, hovering, and landing, including battery charging efficiency and engine efficiency as well);
- Operator cost per shipment (EUR): ;
- Maintenance cost per shipment (EUR): ;
- Insurance cost per shipment (EUR): .
5.3. Exemplary Cost Calculus and First Tentative Cost Comparison
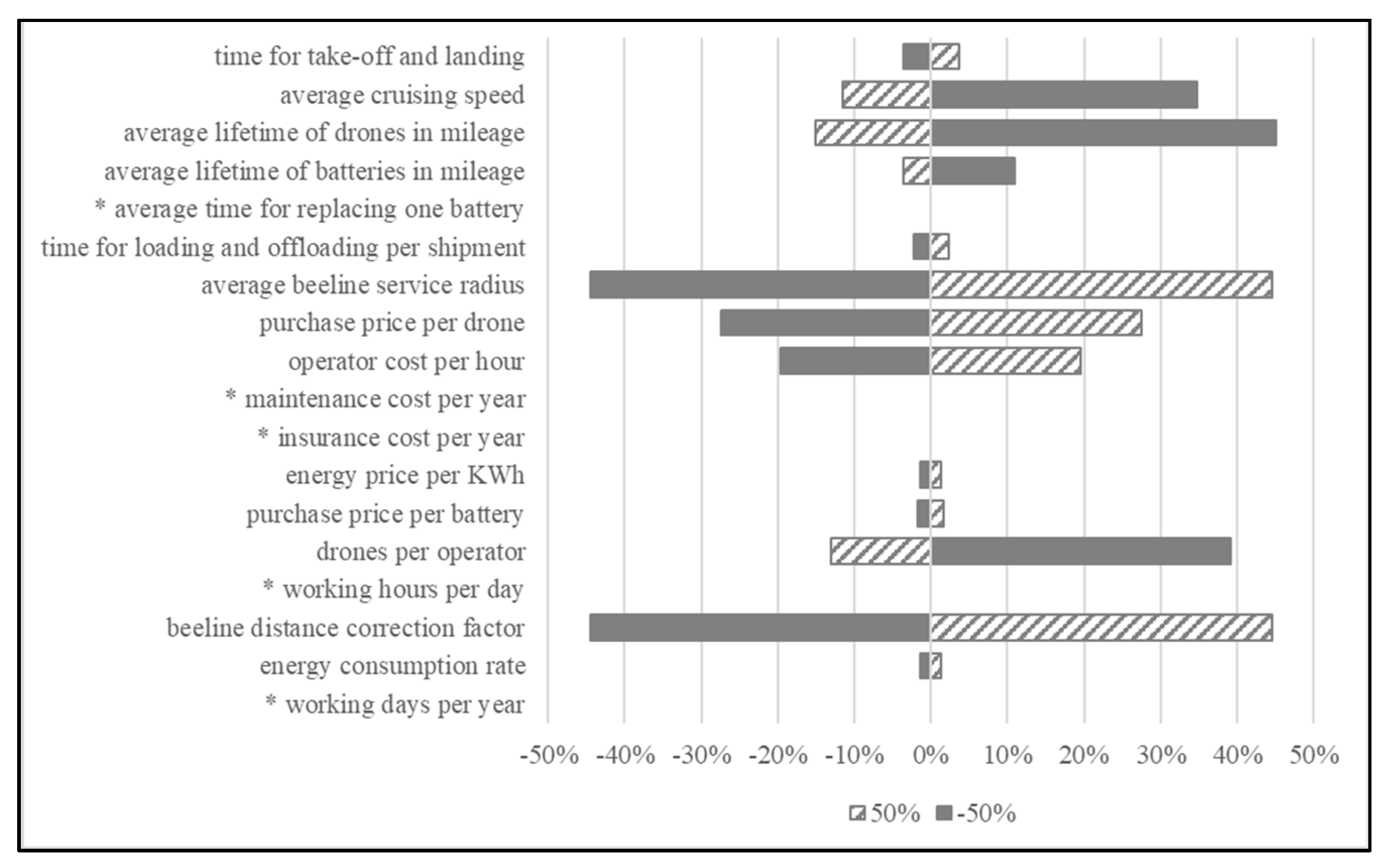
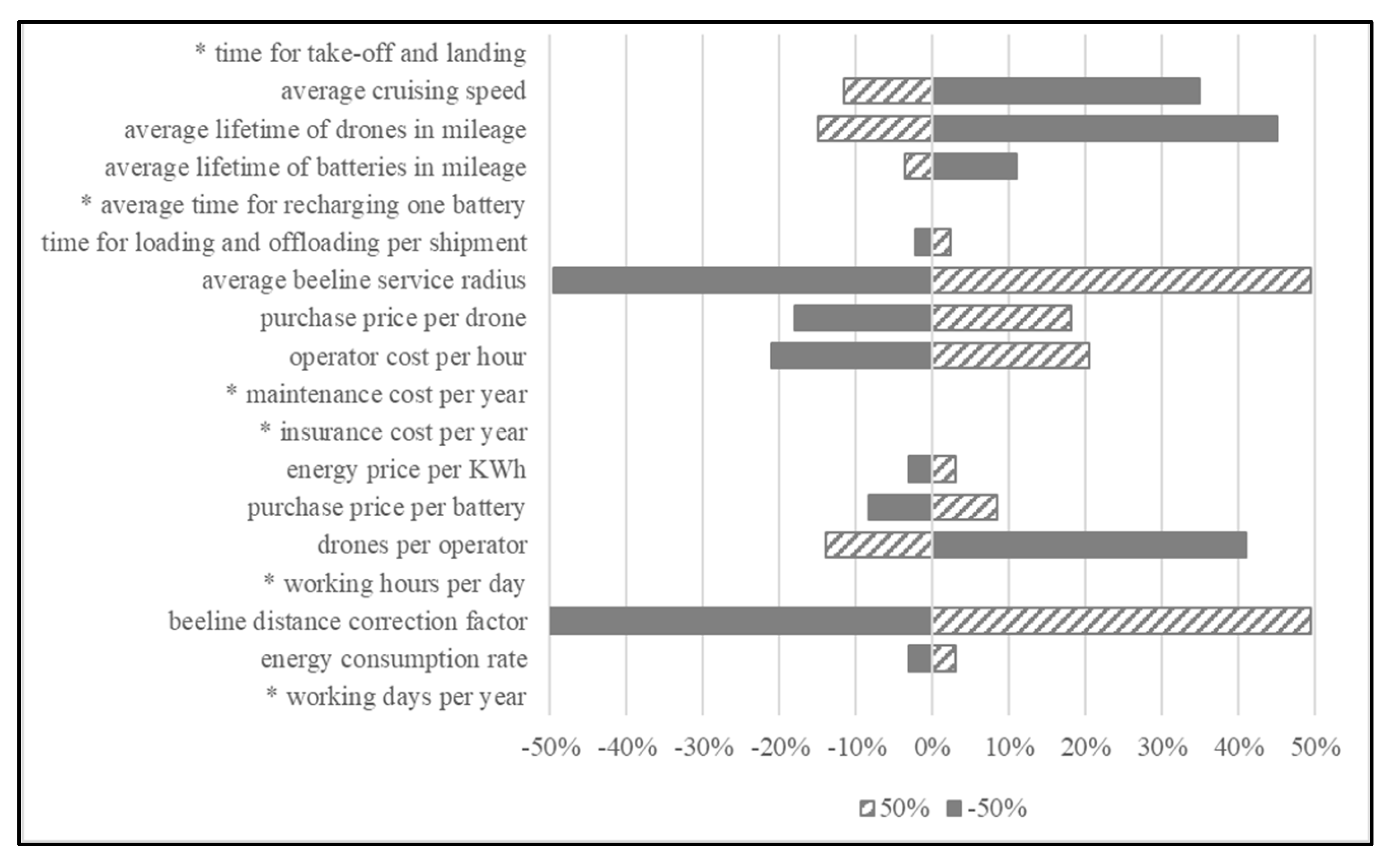
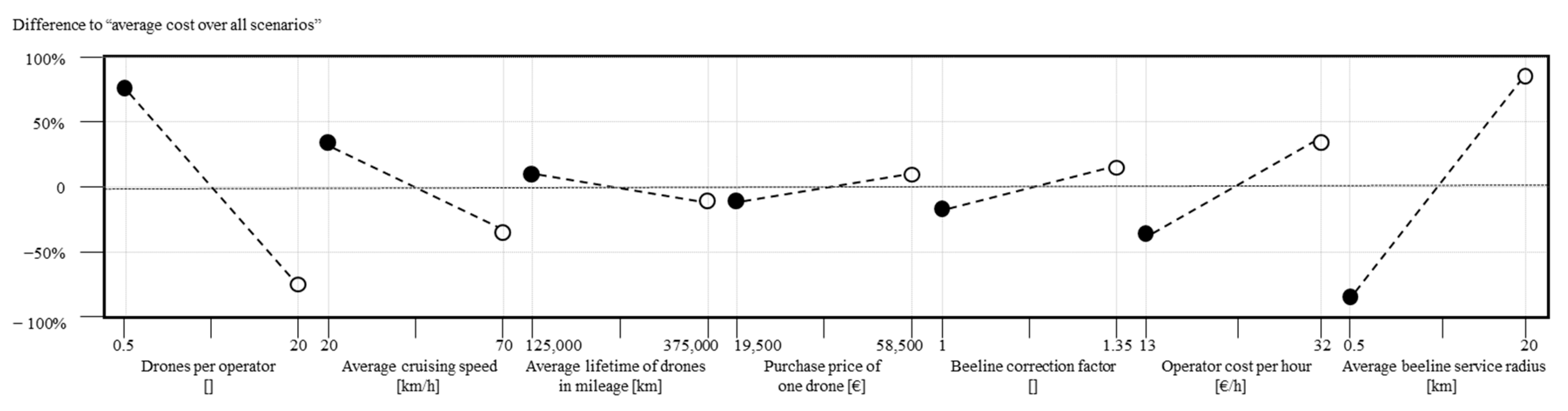
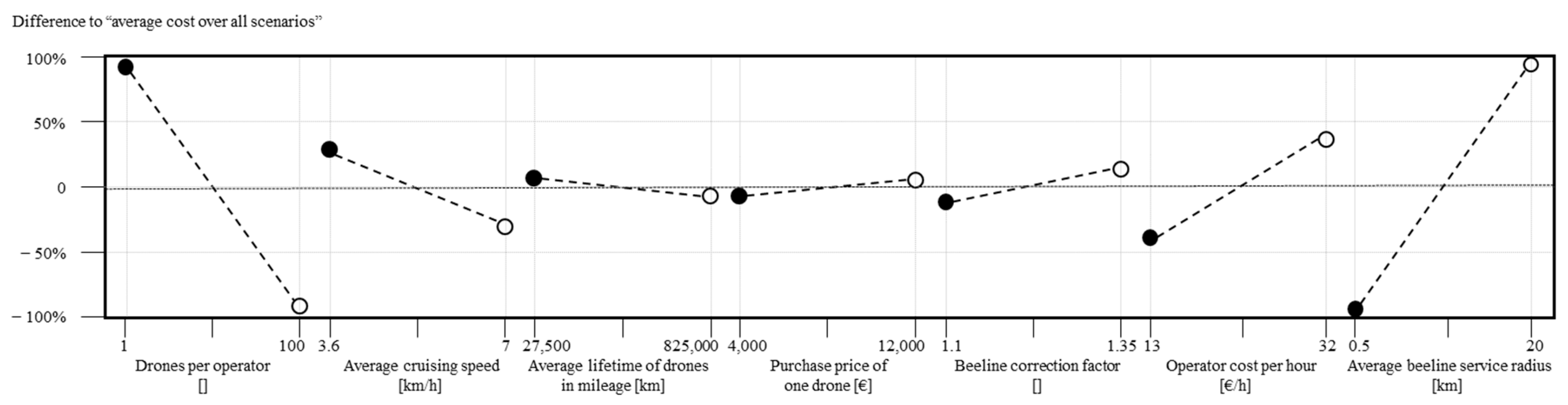
5.4. One-Way Sensitivity Analysis
5.5. Full Factorial Design Approach
5.6. Summary of Commercial Results
6. Environmental Assessment
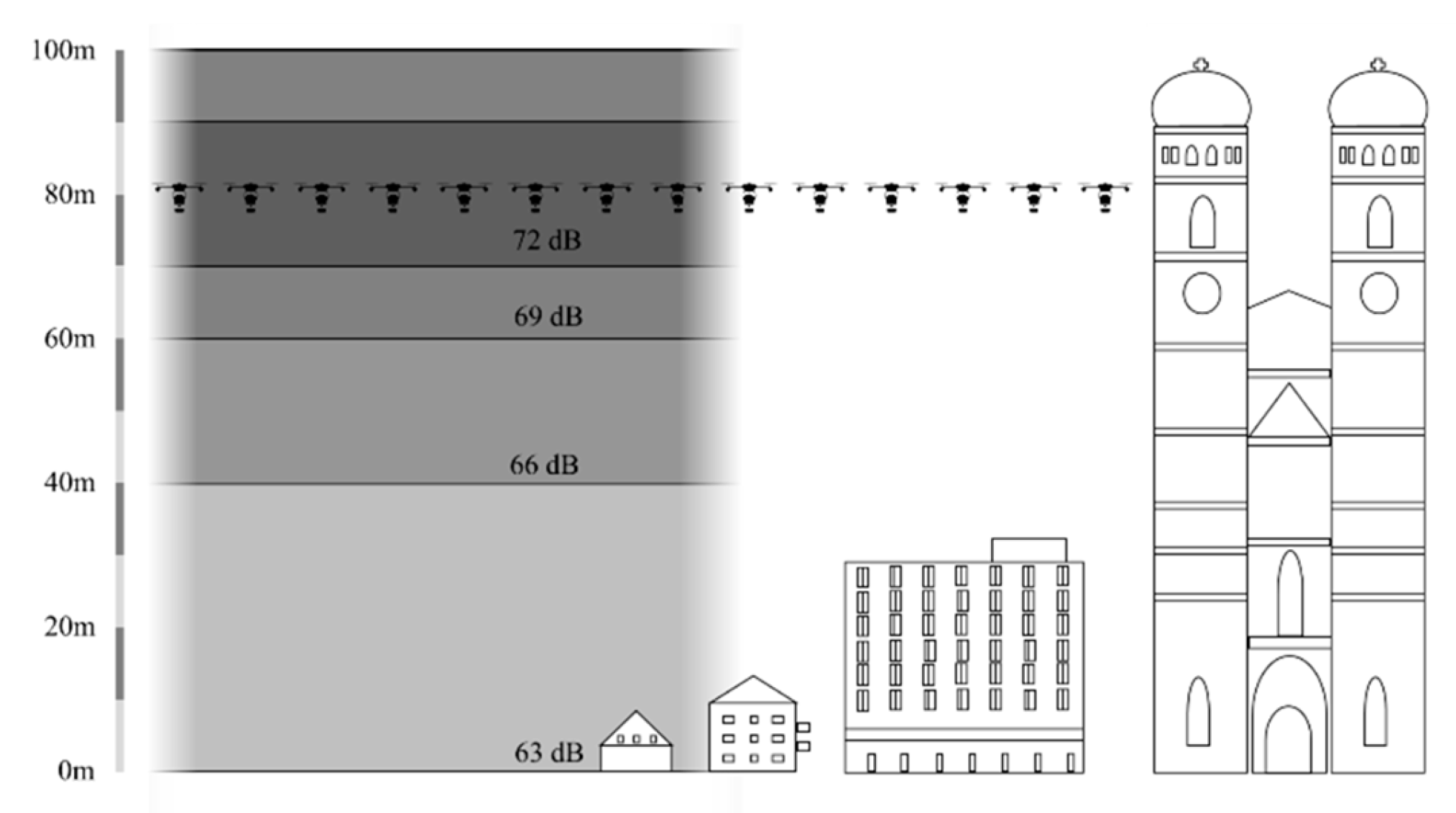
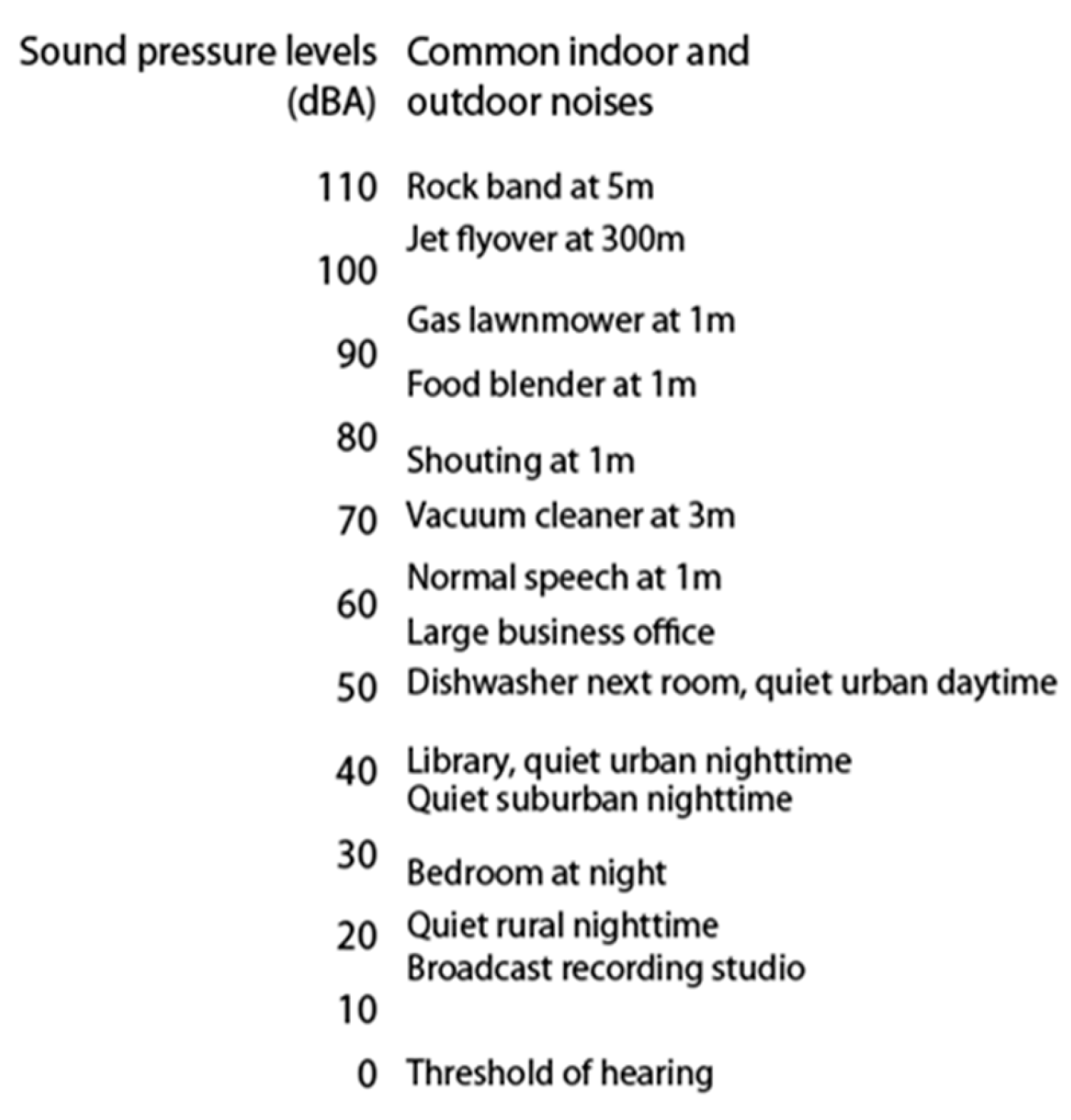
6.1. Noise
6.2. Energy Use
7. Conclusions
7.1. Discussion
7.1.1. Selected Economical Aspects
7.1.2. Selected Environmental Aspects
7.2. Other Needs for Further Research
- One aspect is customer convenience. Therefore, we see the need to elaborate further concepts to automatically hand over goods at delivery without the need for the recipient to be present. This would require, e.g., an infrastructure of parcel drop boxes with a standardized physical interface to drones for automated goods delivery;
- In addition, as with any other innovative technology, the societal implications of drone use need to be investigated, such as occurrences of societal change, ethical issues, privacy violations, and public acceptance [92];
- Another aspect is safety and security. Safety concepts to not harm bystanders (e.g., in case of drone failure, air drones crashing overhead, or delivery bots running into people or vehicles) and security concepts to avoid theft and sabotage by SUGVs and security attacks, e.g., information leakage by UAVs [93,94] will need to be developed and tested;
- The appearance of air drones and delivery bots will also require lawmakers to come up with additional legal regulations on traffic rules, safety, and security aspects as well as damage liability. For delivery bots, these additional regulations can be seen as a subset of the rules to come for automated driving;
- Finally, the scientific operations research (OR) community will have to come up with enhanced or new OR problem models and algorithms to optimize emerging new delivery concepts that (partly) employ UAVs and SUGVs for last mile home delivery. This OR-focused research is ongoing. Ref. [95], for instance, provided an overview of drone-related emerging OR problem models in their “Table 1. An overview of some relevant works from the literature on drone delivery systems”. We assume that the expansion of today’s OR modeling scope will continue, especially if the UAV perspective is generalized to also include SUGVs.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Glossary
| CPP | Cost Per kg Payload |
| CPS | Cost Per Shipment |
| CVS | Consumer Value Stores (a drugstore company) |
| dB | Decibel |
| DHL | a German postal company |
| Drone delivery | Delivery via UAVs or SUGVs |
| Drones | UAVs or SUGVs |
| DRU | Domino’s Robotic Unit (drone type) |
| FAA | Federal Aviation Administration |
| HW | Heavy Weight |
| KPI | Key Performance Indicator |
| LW | Light Weight |
| M2 | Matternet M2 (drone type) |
| OR | Operations Research |
| R2D | Robot to Depot |
| R2T | Robot to Truck |
| SUGVs | Sidewalk Unmanned Ground Vehicles |
| TSP-DS | Travelling Salesman Problem with Drone Stations |
| UAVs | Unmanned Aerial Vehicles |
| UPS | an American postal company |
References
- Boysen, N.; Fedtke, S.; Schwerdfeger, S. Last-mile delivery concepts: A survey from an operational research perspective. OR Spectr. 2021, 43, 1–58. [Google Scholar] [CrossRef]
- Kunze, O. Replicators, ground drones and crowd logistics: A vision of urban logistics in the year 2030. Transp. Res. Procedia 2016, 19, 286–299. [Google Scholar] [CrossRef]
- Mangiaracina, R.; Perego, A.; Seghezzi, A.; Tumino, A. Innovative solutions to increase last-mile delivery efficiency in B2C e-commerce: A literature review. Int. J. Phys. Distrib. Logist. Manag. 2019, 49, 901–920. [Google Scholar] [CrossRef] [Green Version]
- Amazon. Amazon Prime Air Prepares for Drone Deliveries. Available online: https://www.aboutamazon.com/news/transportation/amazon-prime-air-prepares-for-drone-deliveries (accessed on 11 March 2023).
- Domino’s. Domino’s Drone Delivery FAQs—Domino’s Pizza. Available online: https://www.dominos.co.nz/landing-pages/domino-s-drone-delivery-faqs (accessed on 11 March 2023).
- Healthcare MEA. Zipline Expands Medical Drone Deliveries in Ghana. HealthCare Middle East & Africa Magazine, 11 March 2023. Available online: https://www.healthcaremea.com/zipline-expands-medical-drone-deliveries-in-ghana/ (accessed on 11 March 2023).
- Starship. Robot Grocery & Food Delivery in Milton Keynes—Starship Technologies: Autonomous Robot Delivery. Available online: https://www.starship.xyz/robot-food-delivery-in-milton-keynes/ (accessed on 11 March 2023).
- Starship. Introducing the World’s Leading Robot Delivery Service for University College Campuses. Available online: https://starshipdeliveries.com/campus/#section1 (accessed on 11 March 2023).
- Kelion, L. Alibaba Begins Drone Delivery Trials in China. BBC, 2 April 2015. Available online: https://www.bbc.com/news/technology-31129804 (accessed on 11 May 2020).
- Lin, J.; Singer, P.W. Meet China’s Growing Fleet of Automated Delivery Drones. Popular Science, 4 July 2018. Available online: https://www.popsci.com/china-drone-deliveries/ (accessed on 10 November 2020).
- Porter, J. Alphabet’s Nascent Drone Delivery Service Is Booming. The Verge, 9 April 2020. Available online: https://www.theverge.com/2020/4/9/21214709/alphabet-wing-drone-delivery-coronavirus-covid-19-demand-increase-toilet-paper-baby-food (accessed on 23 November 2020).
- Dronethusiast. Amazon Given Go Ahead to Test Prime Air in the UK. Available online: https://www.dronethusiast.com/amazon-test-prime-air-uk/ (accessed on 24 November 2020).
- Federal Aviation Administration. Package Delivery by Drone (Part 135). Available online: https://www.faa.gov/uas/advanced_operations/package_delivery_drone/ (accessed on 24 November 2020).
- DHL. Successful Trial Integration of DHL Parcelcopter into Logistics Chain. Press Release, 5 September 2016. Available online: https://www.dpdhl.com/en/media-relations/press-releases/2016/successful-trial-integration-dhl-parcelcopter-logistics-chain.html (accessed on 24 November 2020).
- DHL. Rapid Response from the Air: Medicines Successfully Delivered Using a Parcel Drone in East Africa. Press Release, 10 April 2018. Available online: https://www.dhl.com/global-en/home/press/press-archive/2018/rapid-response-from-the-air-medicines-successfully-delivered-using-a-parcel-drone-in-east-africa.html (accessed on 24 November 2020).
- Pepitone, J. First FAA—Approved Drone Delivery Drops Medicine in Virginia. NBC News, 17 July 2015. Available online: https://www.nbcnews.com/tech/tech-news/first-faa-approved-drone-delivery-drops-medicine-virginia-n393986 (accessed on 24 November 2020).
- Flirtey. Flirtey and 7-Eleven Complete First Month of Routine Commercial Drone Deliveries, Deliver 77 Packages to Customer Homes in United States. PR Newswire, 20 December 2016. Available online: https://www.prnewswire.com/news-releases/flirtey-and-7-eleven-complete-first-month-of-routine-commercial-drone-deliveries-deliver-77-packages-to-customer-homes-in-united-states-300381798.html (accessed on 24 November 2020).
- Idealog. Flirtey Is Making Domino’s Pizza Delivery by Drone Available for Regular Folks. Idealog, 7 June 2017. Available online: https://idealog.co.nz/tech/2017/06/flirtey-making-dominos-pizza-delivery-drone-available-regular-folks (accessed on 24 November 2020).
- Xu, W. JD Secures China’s First Provincial Drone License for Logistics. Yicaiglobal, 16 November 2018. Available online: https://www.yicaiglobal.com/news/jd-secures-china-first-provincial-drone-license-for-logistics (accessed on 24 November 2020).
- Russell, J. China’s JD.com Tests Drone Delivery in INDONESIA in First Overseas Pilot. TechCrunch, 22 January 2019. Available online: https://techcrunch.com/2019/01/22/jd-drone-indonesia/ (accessed on 24 November 2020).
- Wang, Y. JD’s Drones Completed Trial Delivery in Japan’s Mountainous Region. JD’s Corporate Blog, 14 October 2020. Available online: https://jdcorporateblog.com/jds-drones-completed-trial-delivery-in-japans-mountainous-region/ (accessed on 23 November 2020).
- Burns, S. Drone Meets Delivery Truck. Press Release, 22 February 2017. Available online: https://www.ups.com/us/en/services/knowledge-center/article.page?kid=cd18bdc2 (accessed on 10 November 2020).
- UPS. The Sky is the Limit for Medical Drones. Press Release, 26 March 2019. Available online: https://www.ups.com/us/en/services/knowledge-center/article.page?kid=art169a5e96709 (accessed on 10 November 2020).
- UPS. UPS Flight Forward, CVS to Launch Residential Drone Delivery Service in Florida Retirement Community to Assist in Coronavirus Response. Press Release, 27 April 2020. Available online: https://about.ups.com/be/en/newsroom/press-releases/innovation-driven/ups-flight-forward-cvs-to-launch-residential-drone-delivery-service-in-florida-retirement-community-to-assist-in-coronavirus-response.html (accessed on 23 November 2020).
- Toor, A. Drones Begin Delivering Blood in Rwanda. The Verge, 14 October 2016. Available online: https://www.theverge.com/2016/10/13/13267868/zipline-drone-delivery-rwanda-blood-launch (accessed on 23 November 2020).
- Zipline. How it Works. Available online: https://flyzipline.com/how-it-works/ (accessed on 22 November 2020).
- Bright, J. Drone Delivery Startup Zipline Launches UAV Medical Program in Ghana. TechCrunch, 24 April 2019. Available online: https://techcrunch.com/2019/04/24/drone-delivery-startup-zipline-launches-uav-medical-program-in-ghana/ (accessed on 23 November 2020).
- Porter, J. Zipline’s Drones Are Delivering Medical Supplies and PPE in North Carolina. The Verge, 27 May 2020. Available online: https://www.theverge.com/2020/5/27/21270351/zipline-drones-novant-health-medical-center-hospital-supplies-ppe (accessed on 23 November 2020).
- Dormehl, L. Amazon’s Scout Delivery Bots Are Rolling Out in Two New Cities. Digital Trends, 21 July 2020. Available online: https://www.digitaltrends.com/news/amazon-scout-franklin-atlanta/ (accessed on 5 November 2020).
- Harttmann, C. City-Logistik: Der PostBOT Folgt auf Schritt und Tritt. Logistra, 12 November 2017. Available online: https://logistra.de/news/nfz-fuhrpark-lagerlogistik-intralogistik-city-logistik-der-postbot-folgt-auf-schritt-und-tritt-13728.html (accessed on 5 November 2020).
- Post & Parcel. Self-Driving Delivery Vehicle Maker Dispatch Picks Up $2 m in Seed Funding. Post & Parcel, 8 April 2016. Available online: https://postandparcel.info/72330/news/self-driving-delivery-vehicle-maker-dispatch-picks-up-2m-in-seed-funding/ (accessed on 25 November 2020).
- Menlo College. Carry the Robot Makes a Debut at Menlo College. Press Release, 13 April 2016. Available online: https://www.menlo.edu/news/carry-the-robot-makes-a-debut-at-menlo-college/ (accessed on 4 December 2020).
- Francis, S. PepsiCo Sends Robby’s Delivery Robot to College. Robotics & Automation News, 1 June 2019. Available online: https://roboticsandautomationnews.com/2019/01/23/pepsico-sends-robbys-delivery-robot-to-college/20665/ (accessed on 10 November 2020).
- Daimler. Mercedes-Benz Vans Invests in Starship Technologies, the World’s Leading Manufacturer of Delivery Robots. Press Release, 13 January 2017. Available online: https://media.daimler.com/marsMediaSite/en/instance/ko/Mercedes-Benz-Vans-invests-in-Starship-Technologies-the-worlds-leading-manufacturer-of-delivery-robots.xhtml?oid=15274799 (accessed on 29 October 2020).
- Bertram, I. Paketzustellung per Roboter: Hermes Startet Test mit Starship-Robotern in London. Press Release, 13 April 2017. Available online: https://newsroom.hermesworld.com/hermes-startet-test-mit-starship-robotern-in-london-12325/ (accessed on 5 November 2020).
- Domino’s. Starships Lieferroboter Rollen im Auftrag von Domino’s Durch Hamburgs Straßen. Press Release, 10 May 2017. Available online: https://www.dominos.de/%C3%BCber-domino-s/innovation/starship (accessed on 29 October 2020).
- Starship. A New Kind of Business. Available online: https://www.starship.xyz/business/ (accessed on 29 October 2020).
- MOPO. In Diesen Hamburger Stadtteilen Kommen Corona-Tests per Roboter. MOPO, 22 January 2021. Available online: https://www.mopo.de/hamburg/jetzt-in-hamburg--in-diesen-stadtteilen-kommen-corona-tests-per-roboter-37958166 (accessed on 26 January 2021).
- Hello Future. TwinswHeel, the Robot That Carries Your Shopping. Hello Future, 6 May 2019. Available online: https://hellofuture.orange.com/en/twinswheel-the-robot-that-carries-your-shopping/ (accessed on 25 November 2020).
- Robotics Business Review. TwinswHeel-Soben. Robotics Business Review, 23 September 2017. Available online: https://www.roboticsbusinessreview.com/robotic-company/directory/listings/twinswheel-soben/ (accessed on 25 November 2020).
- Moshref-Javadi, M.; Winkenbach, M. Applications and Research avenues for drone-based models in logistics: A classification and review. Expert Syst. Appl. 2021, 177, 114854. [Google Scholar] [CrossRef]
- Sundar, K.; Rathinam, S. Algorithms for routing an unmanned aerial vehicle in the presence of refueling depots. IEEE Trans. Automat. Sci. Eng. 2014, 11, 287–294. [Google Scholar] [CrossRef] [Green Version]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef] [Green Version]
- Shavarani, S.M.; Nejad, M.G.; Rismanchian, F.; Izbirak, G. Application of hierarchical facility location problem for optimization of a drone delivery system: A case study of Amazon Prime Air in the city of San Francisco. Int. J. Adv. Manuf. Technol. 2018, 95, 3141–3153. [Google Scholar] [CrossRef]
- Troudi, A.; Addouche, S.-A.; Dellagi, S.; Mhamedi, A. Sizing of the drone delivery fleet considering energy autonomy. Sustainability 2018, 10, 3344. [Google Scholar] [CrossRef] [Green Version]
- Ulmer, M.W.; Thomas, B.W. Same-day delivery with heterogeneous fleets of drones and vehicles. Networks 2018, 72, 475–505. [Google Scholar] [CrossRef]
- Figliozzi, M.; Jennings, D. Autonomous delivery robots and their potential impacts on urban freight energy consumption and emissions. Transp. Res. Procedia 2020, 46, 21–28. [Google Scholar] [CrossRef]
- Sonneberg, M.-O.; Leyerer, M.; Kleinschmidt, A.; Knigge, F.; Breitner, M.H. Autonomous unmanned ground vehicles for urban logistics: Optimization of last mile delivery operation. In Proceedings of the 52nd Hawaii International Conference on System Sciences, Maui, HI, USA, 8–11 January 2019; pp. 1538–1547. [Google Scholar]
- Kim, S.; Moon, I. Traveling salesman problem with a drone station. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 42–52. [Google Scholar] [CrossRef]
- Scott, J.E.; Scott, C.H. Drone delivery models for healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Waikoloa Village, HI, USA, 4–7 January 2017; pp. 3297–3304. [Google Scholar]
- Coelho, B.N.; Coelho, V.N.; Coelho, I.M.; Ochi, L.S.; Haghnazar, K.R.; Zuidema, D.; Lima, M.S.F.; da Costa, A.R. A multi-objective green UAV routing problem. Comput. Oper. Res. 2017, 88, 306–315. [Google Scholar] [CrossRef]
- Dayarian, I.; Savelsbergh, M.; Clarke, J.-P. Same-day delivery with drone resupply. Transp. Sci. 2020, 54, 229–249. [Google Scholar] [CrossRef]
- Condliffe, J. Delivery Drones Are Using Vans as Roving Parcel Hubs in Switzerland. MIT Technology Review, 28 September 2017. Available online: https://www.technologyreview.com/2017/09/28/148914/delivery-drones-are-using-vans-as-roving-parcel-hubs-in-switzerland/ (accessed on 11 December 2020).
- Poeting, M.; Schaudt, S.; Clausen, U. Simulation of an optimized last-mile parcel delivery network involving delivery robots. In Proceedings of the Interdisciplinary Conference on Production, Logistics and Traffic, Dortmund, Germany, 27–28 March 2019; pp. 1–19. [Google Scholar]
- Bakach, I.; Campbell, A.M.; Ehmke, J.F. A two-tier urban delivery network with robot-based deliveries. Networks 2021, 78, 461–483. [Google Scholar] [CrossRef]
- Murray, C.C.; Chu, A.G. The flying sidekick traveling salesman problem: Optimization of drone-assisted parcel delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Ferrandez, S.M.; Harbison, T.; Weber, T.; Sturges, R.; Rich, R. Optimization of a truck-drone in tandem delivery network using k-means and genetic algorithm. J. Ind. Eng. Manag. 2016, 9, 374. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Poikonen, S.; Golden, B. The vehicle routing problem with drones: Several worst-case results. Optim. Lett. 2017, 11, 679–697. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization approaches for the traveling salesman problem with drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Carlsson, J.G.; Song, S. Coordinated logistics with a truck and a drone. Manag. Sci. 2018, 64, 4052–4069. [Google Scholar] [CrossRef] [Green Version]
- Boysen, N.; Briskorn, D.; Fedtke, S.; Schwerdfeger, S. Drone delivery from trucks: Drone scheduling for given truck routes. Networks 2018, 72, 506–527. [Google Scholar] [CrossRef]
- Crişan, G.C.; Nechita, E. On a cooperative truck-and-drone delivery system. Procedia Comput. Sci. 2019, 159, 38–47. [Google Scholar] [CrossRef]
- Gonzalez-R, P.L.; Canca, D.; Andrade-Pineda, J.L.; Calle, M.; Leon-Blanco, J.M. Truck-drone team logistics: A heuristic approach to multi-drop route planning. Transp. Res. Part C Emerg. Technol. 2020, 114, 657–680. [Google Scholar] [CrossRef]
- Jennings, D.; Figliozzi, M. Study of sidewalk autonomous delivery robots and their potential impacts on freight efficiency and travel. Transp. Res. Rec. 2019, 2673, 317–326. [Google Scholar] [CrossRef] [Green Version]
- Boysen, N.; Schwerdfeger, S.; Weidinger, F. Scheduling last-mile deliveries with truck-based autonomous robots. Eur. J. Oper. Res. 2018, 271, 1085–1099. [Google Scholar] [CrossRef]
- Riemann, H. Straßenbahn und Lastenfahrrad Verknüpft. Available online: http://www.logistiktram.de/index.html (accessed on 13 November 2020).
- ZMP. Video of “Delivery Robot DeliRo™ Takes the Elevator!” is Released. Press Release, 5 March 2020. Available online: https://www.zmp.co.jp/en/news/pressrelease_20200305 (accessed on 23 November 2020).
- Kreber, K. Europese Primeur: Bezorgrobot in Kantoordie Zelf de LIFT BEDIent. Persberichten, 24 April 2019. Available online: https://www.persberichten.com/persbericht/95203/Europese-primeur-bezorgrobot-in-kantoordie-zelf-de-lift-bedient (accessed on 23 November 2020).
- Thyssenkrupp. Thyssenkrupp Launches Elevator Interface to Allow Multi-Level Robot Movement Throughout Hotels, Hospitals and Other Buildings. Press Release, 17 October 2019. Available online: https://www.tkelevator.com/global-en/newsroom/press-releases/thyssenkrupp-launches-elevator-interface-to-allow-multi-level-robot-movement-throughout-hotels-hospitals-and-other-buildings-97536.html (accessed on 23 November 2020).
- Dronerules. EU Regulations Updates—Drone Rules. Available online: https://dronerules.eu/da/professional/eu_regulations_updates (accessed on 27 December 2020).
- Australian Government. Drone Delivery Operations. Available online: https://www.infrastructure.gov.au/aviation/environmental/aircraft-noise/act_drone_delivery_operations.aspx (accessed on 24 November 2020).
- Schnabel, W.; Lohse, D. Grundlagen der Straßenverkehrstechnik und der Verkehrsplanung: Band 2 Verkehrsplanung, 3rd ed.; Kirsch Baum: Bonn, Germany, 2011. [Google Scholar]
- SESAR. U-Space Blueprint; Luxembourg Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- Coenenberg, A.G.; Fischer, T.M.; Günther, T. Kostenrechnung und Kostenanalyse, 6th ed.; Schäffer-Poeschel: Stuttgart, Germany, 2016. [Google Scholar]
- Koiwanit, J. Analysis of environmental impacts of drone delivery on an online shopping system. Adv. Clim. Change Res. 2018, 9, 201–207. [Google Scholar] [CrossRef]
- Bundesnetzagentur. Bundesnetzagentur—Aktuelle Strommarktdaten. Available online: https://www.bundesnetzagentur.de/DE/Sachgebiete/ElektrizitaetundGas/Unternehmen_Institutionen/HandelundVertrieb/SMARD/Aktuelles/smardaktuelles_node.html (accessed on 9 April 2021).
- FAA. Airworthiness Criteria: Special Class Airworthiness Criteria for the Flirtey Inc. Flirtey F4.5. 24 November 2020. Available online: https://www.federalregister.gov/documents/2020/11/24/2020-25660/airworthiness-criteria-special-class-airworthiness-criteria-for-the-flirtey-inc-flirtey-f45 (accessed on 26 April 2021).
- Logistik Express. Starship Delivery Robots Set to Hit the Streets. Logistik Express, 10 August 2016. Available online: https://www.logistik-express.com/starship-delivery-robots-set-to-hit-the-streets/ (accessed on 26 April 2021).
- Statista. Publishing: Gross Annual Earnings in Germany 2020; Statista: Hamburg, Germany, 2021. [Google Scholar]
- Borgonovo, E. Sensitivity Analysis: An Introduction for the Management Scientist; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Siebertz, K.; van Bebber, D.; Hochkirchen, T. Statistische Versuchsplanung: Design of Experiments, 2nd ed.; Springer: Berlin, Germany, 2017. [Google Scholar]
- Statista. Beitragssätze zur Sozialversicherung in Deutschland bis 2020. 27 May 2021. Available online: https://de.statista.com/statistik/daten/studie/505975/umfrage/beitragssaetze-zur-sozialversicherung-in-deutschland/ (accessed on 11 June 2021).
- FAA. Fact Sheet—Small Unmanned Aircraft Systems Regulations (Part 107). 6 October 2020. Available online: https://www.faa.gov/news/fact_sheets/news_story.cfm?newsId=22615 (accessed on 27 April 2021).
- Deutscher Bussgeldkatalog. Per Schrittgeschwindigkeit mit dem Auto Vorankommen: Hier Ist Geduld Gefragt. Available online: https://www.bussgeldkataloge.de/schrittgeschwindigkeit/ (accessed on 27 April 2021).
- Bundesministerium der Justiz und für Verbraucherschutz. Verordnung über die Zulassung von Personen zum Straßenverkehr (Fahrerlaubnis Verordnung). 2020. Available online: https://www.gesetze-im-internet.de/fev_2010/BJNR198000010.html (accessed on 9 April 2021).
- Lärminfo. Ausbreitung von Lärm. Available online: https://www.laerminfo.at/ueberlaerm/grundlagen/ausbreitung.html (accessed on 23 March 2021).
- Minnesota Pollution Control Agency. Noise Pollution. Available online: https://www.pca.state.mn.us/air/noise-pollution (accessed on 9 April 2021).
- WHO. Environmental Noise Guidelines for the European Region; WHO Publications Regional Office for Europe: Copenhagen, Denmark, 2018.
- Li, F. An Experiment on Quantifying Noise Emission Dimensions of Delivery Bots; Working Paper, Nr. 49; University of Applied Science: Neu-Ulm, Germany, 2021. [Google Scholar]
- Figliozzi, M.A. Carbon emissions reductions in last mile and grocery deliveries utilizing air and ground autonomous vehicles. Transp. Res. D Transp. Environ. 2020, 85, 102443. [Google Scholar] [CrossRef]
- Independent. Lockdown Hasn’t Stopped Milton Keynes’ Delivery Robots. Independent, 3 June 2020. Available online: https://www.independent.co.uk/news/long_reads/delivery-robot-milton-keynes-coronavirus-a9537121.html (accessed on 10 August 2021).
- Kellermann, R.; Biehle, T.; Fischer, L. Drones for parcel and passenger transportation: A literature review. Transp. Res. Interdiscip. Perspect. 2020, 4, 100088. [Google Scholar] [CrossRef]
- Ko, Y.; Kim, J.; Duguma, D.G.; Astillo, P.V.; You, I.; Pau, G. Drone Secure Communication Protocol for Future Sensitive Applications in Military Zone. Available online: https://www.mdpi.com/1424-8220/21/6/2057 (accessed on 12 March 2023).
- Krichen, M.; Adoni, W.Y.H.; Mihoub, A.; Alzahrani, M.Y.; Nahhal, T. Security Challenges for Drone Communications: Possible Threats, Attacks and Countermeasures. Available online: https://ieeexplore.ieee.org/document/9842403 (accessed on 12 March 2023).
- Benarbia, T.; Kyamakya, K. A Literature Review of Drone-Based Package Delivery Logistics Systems and Their Implementation Feasibility. Sustainability 2022, 14, 360. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DHL * | Zipline | Matternet | Flirtey | Emqopter | |
|---|---|---|---|---|---|
| Type of vehicle | fixed-wing tiltrotor | fixed-wing multi-rotors | quadrocopter | quadrocopter | octocopter |
| Max. take-off weight | 12 kg | 20 kg | 13.2 kg | 10 kg | 11 kg |
| Payload | 4 kg | 1.75 kg | 2 kg | 2 kg | 1.5 kg |
| No. of compartments | 1 (inside) | 1 (inside) | 1 (outside) | 1 (inside) | 1 (outside) |
| Loading method | skyport | manual | manual | skyport | manual |
| Offloading method | skyport | parachute | manual | rope | manual |
| Cruising Speed | 130 km/h | 100 km/h | 57.6 km/h | 20 km/h | 20 km/h |
| Battery last | 65 km | 160 km | 20 km | 5 km | 5 km |
| Battery build type | unknown | unknown | unknown | unknown | swappable |
| Noise emission | unknown | unknown | unknown | unknown | 72.4 dB at 10 m |
| Starship | Dispatch | Robby | Domino’s | Twins Wheel | |
|---|---|---|---|---|---|
| Weight | 23 kg | unknown | 27 kg | unknown | 50 kg |
| Payload | 10 kg | 45 kg | unknown | 9.5 kg | 50 kg |
| No. of compartment | 1 | 4 | 1 | 4 * | 1 |
| Loading method | manual | manual | manual | manual | manual |
| Offloading method | manual | manual | manual | manual | manual |
| Cruising speed | Max. 6 km/h | 6 km/h | 6 km/h | 19 km/h | 3.6/7.2 km/h |
| Battery last | 6 km | 77 km | 32 km | 19 km | 15 km |
| Battery build type | swappable | unknown | unknown | unknown | built-in |
| Noise emission | unknown | unknown | unknown | unknown | unknown |
| Battery Types | |
|---|---|
| Built-in | 1 |
| Swappable | 2 |
| Parameters | Unit | UAV | SUGV | Comments |
|---|---|---|---|---|
| (d/a) | 312 | 312 | Assumption: 52 weeks per year × 6 days a week = 312 | |
| (KWh/km) | 0.025 | 0.045 | Fact: data provided by manufacturers | |
| - | 1.27 | 1.27 | Assumption: based on [72] | |
| (h/d) | 16 | 16 | Assumption: 6:00–22:00 | |
| (km) | 75,000 | 30,000 | Fact: no data provided by UAV manufacturer; data provided by SUGV manufacturer: batteries have a lifetime of about 3 years and drones of about 10 years Assumption: dividing drones’ lifetime mileage by 10 years and batteries have 3 years of mileage for both UAVs and SUGVs | |
| (km) | 250,000 | 100,000 | Fact: no data provided by UAV manufacturer; data provided by SUGV manufacturer: 100,000 km Assumption: 250,000 km for UAVs [75] | |
| - | 20 1 | 100 2 | Assumption: see table footer | |
| (kg) | 1.5 | 50 | Fact: data provided by manufacturers | |
| (EUR) | 1000 | 1600 | Fact: 50 EUR–1000 EUR depending on capacity (data provided by UAV manufacturer); approximately 20% of vehicle price (data provided by SUGV manufacturer) Assumption: conservative estimate 1000 EUR for UAV and 1600 EUR for SUGV | |
| (EUR/KWh) | 0.3 | 0.3 | Fact: the average day-ahead wholesale electricity price in 2020 [76] | |
| (EUR/a) | 0 * | 0 * | * Assumption: as maintenance and insurance rates for this use case are currently evolving and presumably yet not in a robust steady state, we assumed identical rates for both the UAV and SUGV and neglected these two factors in our total cost calculus. | |
| (EUR/a) | 0* | 0* | ||
| (EUR/h) | 32 3 | 32 3 | Assumption: see table footer | |
| (EUR) | 39,000 | 8000 | Fact: data provided by interviewed manufacturers | |
| (km) | 2 4 | 2 4 | Assumption: conservative estimate 2 km beeline radius for both the UAV and SUGV, details see table footer | |
| (h) | 0.033 | 0.033 | Assumption: 1 min for payloads’ loading and 1 min for offloading | |
| (h) | 0.017 | 0 | Assumption: 1 min for replacing the swappable battery; 0 min for the built-in battery | |
| (h) | 0.75 | 2.5 | Fact: data provided by manufacturers | |
| (h) | 0.033 | 0 | Fact: 1 min for take-off, 1 min for landing (data provided by UAV manufacturer); 0 min for SUGV delivery | |
| (km/h) | 20 | 3.6 | Fact: realistic cruising speed 20 km/h (oral information provided by UAV manufacturer); 3.6 km/h or 7.2 km/h (information provided by SUGV manufacturer) Assumption: conservative estimate 3.6 km/h for the SUGV |
| Impact Factors | Unit | UAV | SUGV | Comments | ||
|---|---|---|---|---|---|---|
| Low | High | Low | High | |||
| - | 1 * | 1.35 | 1.1 | 1.35 | The average range for city streets is 1.1–1.35 [72]. *:assumption: UAVs are allowed to fly straight | |
| (km) | 125,000 | 375,000 | 27,500 | 825,000 | data are difficult to acquire, no extensive research on other manufacturers; we ad hoc estimate a 50% decrease of the exemplary parameter for low values and a 50% increase of the exemplary parameter for high values | |
| (EUR) | 19,500 | 58,500 | 4000 | 12,000 | ||
| - | 0.5 | 20 | 1 | 100 | Low values: data provided by interviewed drone manufacturers High values: see table footers 1 and 2 of Table 4 | |
| (EUR/h) | 13 | 32 | 13 | 32 | Minimum monthly gross wage (1600 EUR) to average monthly gross wage (3994 EUR) of full-time employees in Germany 2019 [82];for the calculation, see table footer 3 of Table 4 | |
| (km) | 0.5 | 20 | 0.5 | 20 | Low values: we suppose a distance shorter than 0.5 km does not provide enough motivation for drone delivery. High values: most European cities have around 20 km radius, e.g., Berlin, Hamburg, London, and Paris (checked on Google Maps). | |
| (km/h) | 20 | 70 1 | 3.6 | 7 2 | Low values: data provided by interview drone manufacturers High values: see table footers | |
| Parameters | Unit | UAV ° | Light-Weight (LW) SUGV ** | Heavy-Weight (HW) SUGV ° |
|---|---|---|---|---|
| (Kwh/km) | 0.025 | 0.025 | 0.045 | |
| (Kwh) | 0.064 | 0.064 | 0.114 | |
| (Kwh/kg) | 0.043 | 0.006 | 0.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, F.; Kunze, O. A Comparative Review of Air Drones (UAVs) and Delivery Bots (SUGVs) for Automated Last Mile Home Delivery. Logistics 2023, 7, 21. https://doi.org/10.3390/logistics7020021
Li F, Kunze O. A Comparative Review of Air Drones (UAVs) and Delivery Bots (SUGVs) for Automated Last Mile Home Delivery. Logistics. 2023; 7(2):21. https://doi.org/10.3390/logistics7020021
Chicago/Turabian StyleLi, Fang, and Oliver Kunze. 2023. "A Comparative Review of Air Drones (UAVs) and Delivery Bots (SUGVs) for Automated Last Mile Home Delivery" Logistics 7, no. 2: 21. https://doi.org/10.3390/logistics7020021