
Industry 4.0 and Industrial Robots: A Study from the Perspective of Manufacturing Company Employees




1
Faculty of Economics and Administrative Sciences, Gaziantep University, 27310 Gaziantep, Turkey
2
Sustainable Development Research Center, Khoja Akhmet Yassawi International Kazakh-Turkish University, Turkestan 161200, Kazakhstan
3
Department of Business Technologies and Entrepreneurship, Vilnius Gediminas Technical University, Sauletekio al. 11, 10223 Vilnius, Lithuania
4
Faculty of Economics and Administrative Sciences, Kastamonu University, 37150 Kastamonu, Turkey
*
Author to whom correspondence should be addressed.
Logistics 2023, 7(1), 17; https://doi.org/10.3390/logistics7010017
Submission received: 28 January 2023
/
Revised: 1 March 2023
/
Accepted: 6 March 2023
/
Published: 15 March 2023
(This article belongs to the Special Issue Lights-Out Logistics)
Abstract
:Background: Human–robot collaboration is essential for efficient manufacturing and logistics as robots are increasingly used. Using industrial robots as part of an automation system results in many competitive benefits, including improved quality, efficiency, productivity, and reduced waste and errors. When robots are used in production, human coworkers’ psychological factors can disrupt operations. This study aims to examine the effect of employees’ negative attitudes toward robots on their acceptance of robot technology in manufacturing workplaces. Methods: A survey was conducted with employees in manufacturing companies to collect data on their attitudes towards robots and their willingness to work with them. Data was collected from 499 factory workers in Istanbul using a convenience sampling method, which allowed for the measurement of variables and the analysis of their effects on each other. To analyze the data, structural equation modeling was used. Results: The results indicate that negative attitudes towards robots have a significant negative effect on the acceptance of robot technology in manufacturing workplaces. However, trust in robots was found to be a positive predictor of acceptance. Conclusions: These findings have important implications for manufacturing companies seeking to integrate robot technology into their operations. Addressing employees’ negative attitudes towards robots and building trust in robot technology can increase the acceptance of robots in manufacturing workplaces, leading to improved efficiency and productivity.
1. Introduction
We are witnessing a new industrial revolution that has the potential to transform industries worldwide. This revolution ushers in an era in which a bridge is built between the physical and digital worlds, and human–machine interaction is enhanced through intelligent machines, mainly as artificial intelligence advances [1]. This revolution, which altered all aspects of society, also altered business models. Many firms in the manufacturing and service industries are pursuing efficiency by optimizing their processes following digital technologies [2]. It is true that automation has been used in manufacturing for quite some time [3]. However, recent advances in robotics and artificial intelligence have also impacted the service sector [4]. This has opened up enormous job opportunities for people [5]. Artificial intelligence (AI) appears to be a crucial part of the revolution we referred to above because it enables machines to collect and process data without human intervention, allowing them to conduct tasks traditionally associated with human intelligence, such as making decisions and solving problems [1].
Even though robots have been used in industry for some time now, it appears that the current state of robotics technology and other social developments in the world (such as COVID-19) will lead to even greater adoption of robots in the workplace [3]. With the advent of Industry 4.0 and its accompanying technologies, such as the IoT, big data analytics, and cloud computing, all business procedures are rethought from the ground up. Robotics, automation, and AI have given businesses a leg up in the marketplace and helped them to stay in business [6].
Forward-thinking businesses frequently adopt new processes and technologies, often as proactive marketing of new products, quality improvements, capacity increases, and investment in innovative processes. For optimal performance, these businesses require a wide range of technological tools [7]. Companies gain a distinct competitive edge from robotic technology because of its increased productivity and adaptability in manufacturing and service [6]. Innovative businesses are quicker to adopt new technologies. This innovation economy relies heavily on robotics, AI, machine learning, and large amounts of data, particularly in manufacturing [7].
A new approach to using industrial robots has emerged that allows for completing previously reserved tasks while simultaneously increasing product quality and decreasing production costs [8]. Human operators in manual manufacturing systems can use their perception, planning, and movement abilities to handle various tasks, tools, materials, and unforeseen changes. However, as physical, and mental fatigue set in, human operator performance typically declines across the board [9]. To prevent accidents, robots in the conventional model of automation work in isolation within predetermined spaces [10]. When producing and assembling complex products in small batches, the traditional business model’s inflexibility and accompanying higher costs are major drawbacks [8]. In addition, when humans and robots work together, exhaustion is reduced. Industrial robots can continuously perform their programmed tasks with accuracy, speed, and repeatability that humans cannot achieve [11], allowing businesses to increase quality and efficiency without sacrificing speed or adaptability.
The conventional model of industrial robot application has shifted from one in which robots work independently in a closed cell, to one in which they collaborate with humans [10]. Robots can increasingly do jobs that were once thought possible only by humans, and they no longer must be big, inflexible, and mechanical-looking. This trend is expected to continue as technological developments in robotics make robots better suited to human-centered work environments, boost their ability to perform tasks that humans can, and familiarize the public with robots [12].
One of the most critical factors in the widespread adoption of robots for various uses and tasks in the workplace is their ability to mimic human behavior. Studies of how humans and robots can effectively communicate and work together are expanding rapidly [13]. People’s perspectives and actions in response to industrial robots can be understood through various innovation theories, such as the technology acceptance model, the innovation diffusion model, the reasoned action theory, the planned behavior theory, and the social-cognitive theory [14]. Even though robots have not entirely replaced humans, as was once predicted [13], there are still some serious concerns to be addressed, as robots are widely expected to become an integral part of the working world soon. These include people’s fears of robots [15], people’s views on robots’ usefulness and ease of use [16], and people’s plans for incorporating robotics into the workplace [6]. As new robot technology could drastically alter the current business climate, it is expected that blue-collar workers may be resistant to this change. The adoption of robotic technologies in blue-collar jobs is primarily driven by people’s fear of automation and subsequent resistance to change [17].
Using industrial robots in manufacturing has received much attention in recent years, and there has been much research on how humans respond to new technologies. The advantages of industrial robots, such as increased efficiency and reduced costs, have made them an attractive option for manufacturing operations. However, despite their benefits, the adoption of industrial robots is still limited due to negative attitudes toward robots, and far fewer studies have focused on how workers feel about robots in the workplace, especially considering recent advances in robotics. Negative attitudes can lead to resistance to change, which can hinder the adoption of industrial robots. To understand the abovementioned factors affecting the acceptance of industrial robots in manufacturing, we conducted an empirical study. This study aims to investigate the impact of negative attitudes on the acceptance of industrial robots. The following study questions were developed:
- Do the negative attitudes of employees towards robots affect the acceptance of robots in workplaces?
- How does employees’ trust in robot technology affect their intention to use robots?
Section 2 of this research comprises a literature review. Section 3 will go into detail about the materials and methods used. In Section 4, we present the data analysis results from the survey. Finally, Section 5 discusses the study’s findings, and Section 6 concludes the paper with the study’s implications and limitations, and provides some suggestions for further research.
2. Literature Review and Hypothesis Development
2.1. Theoretical Framework
Industrial Robots
Robots are electromechanical structures built to perform a specific set of tasks, or to conduct functions or behaviors per a predetermined set of rules specified by computer software [12]. Regarding strength and endurance, humans are no match for robots. Performance and quality are typically impacted negatively because of these constraints. To keep up with the times in terms of sustainability and, at the same time, optimize the production process [18] and the longevity of their products, some manufacturers have replaced human workers in the field with robots [5]. Robots can be set to work around the clock to help manufacturing companies increase output, efficiency, and profits. While automation has altered manufacturing, it has also opened up vast new revenue streams [19]. Robots have long been hailed for their ability to boost productivity, effectiveness, and quality in various settings. Technology has played a crucial role in production for at least three decades [20].
Robots in manufacturing have many benefits, including improved efficiency, lower risk of injury, and adaptability in terms of use and programming. To enhance manufacturing output, robots will need to perform several tasks, including keeping a close eye on their surroundings, safely interacting with humans, collecting new skills and tasks, and adjusting their behavior based on the circumstances. One of the essential uses for robots in the industry is performing assembly work independently or with a human operator’s assistance [21].
Factories are gradually replacing human workers with more productive and efficient industrial robots to reduce production labor costs, which has led to the development of more effective systems. Energy efficiency, time efficiency, cost effectiveness, and regulatory compliance are all crucial parameters that must be programmed into a robot to achieve maximum productivity with minimal input [5].
Industry 4.0 is, without a doubt, a significant factor shifting the role of robots. Industry 4.0, first discussed at the German trade show Hannover in 2011, is now a worldwide topic of conversation that stimulates development across various industries by rethinking the interconnections between humans, machines, data, and decisions [22]. Robots will need to develop higher levels of intelligence to facilitate the advanced manufacturing environment proposed by the Industry 4.0 paradigm [21].
Research in business management and related fields has developed conceptual models that address the readiness for digitized work because of information systems powered by international programs such as Industry 4.0. As a result, Industry 4.0 has ushered in massive shifts in the workforce and brought humans and machines closer regarding their physical, cognitive, and sensory capabilities. Industry 4.0 readiness models that focus on the workforce highlight three main sets of factors: (1) social and collaboration competencies; (2) technical knowledge, skills, and attitudes; and (3) openness to new knowledge and flexibility in the workplace. A lesser emphasis should be placed on interpersonal and intercultural competence [22].
With the help of industrial automation, mass production can be performed with high quality and productivity. Automation and manual labor complement one another because both depend on the enhancement of labor productivity, which brings up the idea of human–robot collaboration [18]. One of the most popular types of automation robots is the collaborative robot. Collaborative robots can be more adaptable in manufacturing and complete novel tasks thanks to their maturing technology. As an alternative, new sensor designs and algorithms have been developed to make the first robots more amenable to high volumes and minimal variables, opening up many potential new applications. As a result, robots are becoming more commonplace in sufficient settings, including manufacturing [19]. The automotive and electronics industries are the primary incubators of this partnership. Most automobile-related applications involve assembly processes in which robots perform tasks that require high precision or that, if performed manually, would cause repetitive strain injuries to workers, such as lifting and carrying heavy objects. Physically demanding tasks are made more accessible by robots, such as the removal of doors and the loading of seats, as well as the loading and moving of heavy wheels in tire shops [10].
Robots in factories are typically separated using lasers, fences, and other optical barriers. The term “collaborative robots” (or “cobots”) describes robots designed to work side by side with humans in a workplace. This strategy reduces the potential for harm when humans and robots work together. Edges and corners have been rounded off to make the cobot safer and less prone to causing injuries. In the event of unintended contact or collision, a cobot’s built-in sensors can detect these forces and cause it to either cease or return to where it parks. Furthermore, the operator can simply indicate to the robot the desired motion, and the robot will faithfully replicate it. A new manufacturing era has begun thanks to the robot’s copy accuracy, agility, and capacity to produce repetitive work at human capabilities [23].
Collaborative robots, also known as cobots, are designed with user-friendly interfaces to lessen the strain on human workers performing physical production tasks such as safely handling hazardous materials or precisely executing repetitive actions. In addition, sensors and software have improved direct human–robot interaction by enabling robots to interact safely with humans, be manipulated intuitively, and engage in tasks without the risk of physical contact or collision. As collaborative robots become more commonplace in the manufacturing industry, the human–robot collaboration system presents itself as a promising method for companies to boost output and worker safety while relieving them of some of their workload [9].
Cobots appear in jobs that require close interaction between human workers and robots. Partnerships between humans and robots are part of this field; in these arrangements, humans oversee and direct robot operations and gain knowledge from their robotic partners. Cobots excel because they maintain temporal and semantic consistency in their service delivery. The safety zones change based on factors including how close people are to each other, how fast the robot moves, and where the barriers are placed. Rapid and reliable communication is required for the control system to take prompt action, such as ceasing the cobot’s movement [19].
Considering these factors, the literature on the examination of industrial robots in terms of the above-mentioned Industry 4.0 readiness models has just expanded. The Unified Theory of Acceptance and Use of Technology (UTAUT) model [24] is widely used to study the acceptance of technology in various contexts, including industrial robots. The UTAUT model posits that those four factors—performance expectancy, effort expectancy, social influence, and facilitating conditions—influence technology acceptance. Recent studies have extended the UTAUT model to include new moderators and determinants, such as emotional attachment, to better understand technology adoption, including the adoption of robots in Industry 4.0 [25].
2.2. Hypothesis Development
2.2.1. Negative Attitudes towards Robots
Given that robots will soon be commonplace in the workplace, whether workers are prepared to embrace this change has become an essential question. Technophobia, or a fear of technology, results from worries about introducing novel technologies such as robots [6]. Sufficient evidence confirms that social psychological processes including attitudes and trust are crucial factors in productive cooperation with robots and, ultimately, their acceptance in everyday life. Aside from these well-studied elements, robotization may also cause positive and negative emotional responses among workers [26]. People will not likely form an emotional connection with or trust a robot if they are always concerned about their safety around it. The inability to form a common identity and trust between two actors because of their mutual fear of a common threat is a common problem in interpersonal relationships [27]. When innovative technologies such as social robots are integrated into the same workplace as humans, it changes the dynamics between humans and their technological counterparts. Some workers may have a more challenging time than others adjusting to this change. It can cause one to feel bad, affecting one’s mental health [26].
Many blue-collar workers worry their jobs will be automated away. As a result, concerns about technological unemployment are a significant barrier to the widespread implementation of new technologies in the traditional labor sectors. People’s unwillingness to embrace new technologies is another roadblock to adoption [17]. Employees feel increasingly threatened by autonomous, mobile, and self-learning robots. Workers today are understandably worried about the rise of robots, as they worry their skills will be rendered obsolete and that they will be mistreated. Employees worry about robots in the workplace because of their lack of emotional intuition, imagination, and empathy and because of the need for retraining to comply with health and safety regulations and operate robots [6].
The general attitude toward technology is related to the attitude and behavior responses to a more specific situation involving that technology, which is consistent with previous research and theories on technology acceptance. Therefore, a favorable outlook on robots is significantly correlated with favorable reactions to interactions with robots in the workplace [3]. According to the authors, building trust and identification within a team can be aided by working with a robot towards a common goal [27].
Safety is of the utmost importance in robotics, as in all technology areas. Because of the interdisciplinary nature of robotics, many security issues arise, including those related to communication protocols, firmware, cryptography, data storage, mechanical designs, control systems, and more [5]. The potential for harm must be assessed in any working environment where humans and robots interact. Increasing automation, especially on assembly lines, brings robots closer to human workers and allows them to perform more complex tasks [28].
Research into human–robot interaction seeks to clarify fundamental questions about human–robot relationships and to inform the development, design, and assessment of human–robot systems [29]. According to studies and articles published in this area, trust is a significant factor in determining whether or not people will adopt and use autonomous technology [30]. Though automation systems have advanced, even the most advanced systems are useless if users refuse to engage with them out of misplaced distrust. As a result, researchers in the fields of automation and robot systems consider trust fundamental to comprehending how people view and interact with robotic technologies [31].
Humans react differently to humanoid robots than they do to machine-like robots, and those who can express human-like features are viewed as more trustworthy [30]. When people place their faith in a cooperating robot, they are saying they will trust or believe in the robot’s assistance. If a human does not trust the robot, they might not want to work with it. Institutional faith in robots may also harm humans [32]. The risk of handing over control of a process to a machine is inherent in using robots, which take over for humans in various settings and contexts [30]. However, while human–robot interaction can make some people’s lives easier, it can also threaten human beings. When being directed from one location to another, robots can easily cause catastrophic mishaps. As a result, sensors and data processing methods have been used to solve security-related issues for the past twenty years [33].
According to theories of human behavior, prior attitudes and beliefs about a topic significantly impact how that topic is discussed and acted upon. The likelihood that an individual will engage in a particular behavior in the future is directly correlated with the degree to which they hold favorable attitudes or beliefs regarding that behavior. In particular, this holds when trying to foresee how people will engage with technology in the future. It is also argued that people are more likely to want to work with robots again if they feel safe doing so while performing a task with the robot [27]. Concern for one’s safety and comfort in the presence of a robot and apprehension about potential harm resulting from the robot’s own mistakes are all expressions of security in human–robot interaction. Accessibility, a field of view, posture, gaze direction, and distance from a robot are all factors that can impact this scenario [34]. Therefore, users will not want to use robots when perceiving the risk mentioned above [31]. The following hypothesis has been formulated in this context:
Hypothesis 1 (H1).
Negative attitudes towards robots significantly affect the intention to accept robots in workplaces.
2.2.2. Trust in Human–Robot Collaboration
In the traditional master–servant relationship, robots have been relegated to subservient roles. Recent advances in robotics, however, have allowed for the creation of socially interactive robots; as a result, robots are now permitted and even encouraged to serve as considerate, adaptable, and dependable helpers instead of slave-like ones [31].
One of the most crucial factors in determining how well a robotic system performs is the degree to which people have faith in its ability to perform its intended task. Trust plays a role in whether or not operators adopt new technologies; thus, it is essential to investigate the factors that inspire trust in emerging robotic systems [29].
Workplaces that involve humans and robots working together to accomplish a common goal are examples of human–robot collaboration. Thanks to progress in robotics, humans can now collaborate with robots. Together, humans can offload mundane tasks to robots [27]. To improve teamwork between humans and robots, researchers have focused on teaching both groups to develop a theory of mind based on social-cognitive mechanisms and the concept of common intention. While both agree that humans and robots should work together, the former also advocates for robots to be able to read human emotions from, for example, facial expressions and body language. Because of the rarity of the use of robots, however, it is essential to ensure the public’s acceptance of this practice, where trust plays a crucial role [35].
A successful human–robot collaboration production system must ensure the safety of human operators above all else. Any production system that involves human and robotic collaboration must guarantee a collision-free zone at all times. However, model-based control technologies are typically employed in developing industrial robot control systems. Traditional industrial robots do not account for humans or other moving objects when performing assembly tasks. Therefore, in a human–robot collaboration production system, a safe working environment free from collisions is not currently provided by industrial robot systems. Some researchers have proposed sensor-based safety systems to guarantee the security of human–robot collaboration production systems. Real-time distance monitoring between humans and robots is made possible by depth sensors. If a robot gets too close to a human while they are working together, it can be ceased or made to back away. On the flip side, the approach will reduce the effectiveness of collaborative assembly because of the constant starting and stopping of the robots [36].
Those who feel more socially present during human–robot interaction are more likely to view robots as credible social actors and disregard their artificial nature. Furthermore, people who experience a strong sense of social presence are more likely to have favorable impressions of the robot because they will see it as an embodied artificial social actor with human characteristics [31].
For robotics to have a future, it must work in tandem with humans [37]. When humans and robots work together, there is trust because everyone expects the robot to perform to a certain standard [35]. Safety regulations have long limited industrial human–robot interaction due to industrial robot size, weight, and potential danger [38]. Protecting people is the top priority in any setting where humans and robots coexist [37]. As a result, for a human–robot team to succeed, its human members must have faith that their robotic teammate will look out for the team’s best interests and safety [35]. While robots are highly adaptable, humans on the move may end up in their workspace [37]. Therefore, effective human–robot interaction relies on a well-calibrated level of trust on both sides. The results of a conversation change depending on whether or not trust is present [35]. Workers who rely on human assistance with robots will be more open to using robots. Therefore, the following hypothesis was formulated:
Hypothesis 2 (H2).
Trust in human–robot collaboration positively affects the intention to accept workplace robots.
Accordingly, the research model is shown in Figure 1.
3. Materials and Methods
3.1. Sample and Data Collection
Respondents were given a questionnaire adapted to measure the research variables. The data were obtained from the employees of the manufacturing companies located in Istanbul, which are included in the top 500 companies list published annually by the Istanbul Chamber of Industry. The research sample comprises 499 individuals from 27 businesses contacted through convenience sampling. During February and March 2022, data were gathered through online and in-person surveys.
3.2. Measurement Instrument
The participant questionnaire used for this investigation was subdivided into two separate components. In the first portion of the survey, participants are asked a series of questions designed to reveal their demographics. In the second part of the study, the researchers investigated the parameters of the research model by measuring 27 items (see Appendix A, Table A1). In the second part of the research project, the participants’ levels of agreement with each statement were evaluated using Likert scales, which have five levels of agreement.
The questionnaire was adopted from the studies listed below to measure three variables:
3.3. Analysis Method
The research comprised two distinct stages of data examination.
Validity and reliability of the construct were examined in the first stage. This conclusion is the product of exploratory and confirmatory factor analyses, both of which contributed to its formation. Validation of the observations for factor analysis was accomplished using the Kaiser–Meyer–Oklin (KMO) and Bartlett sphericity tests. When the KMO value falls between 0.5 and 0.7, it is deemed acceptable; between 0.7 and 0.8, it is deemed good; and when it exceeds 0.8, it is deemed excellent. The correlation matrix and the results of the Bartlett sphericity test both suggest that factor analysis can be performed with relative ease, showing that the sample size is sufficient [40]. To ensure that all the study’s variables could be evenly distributed across all the structures, the CFA method was used. Goodness-of-fit values of the scale and correlations between the variables were determined to assess construct validity and reliability. In order to determine the measurement instrument’s overall significance, we calculated the composite reliability of the factors and the average of variance (AVE) that could be attributed to them [41]. When the structure value is more significant than 0.70 [42] and the explained variance is greater than or equal to 0.40, it is considered to have an acceptable level of structural reliability [43]. In addition, skewness and kurtosis values were investigated to guarantee that the data followed a normal distribution.
In the second step of the process, the analysis was performed using the structural equation model developed in the first stage to check whether or not the H1 and H2 hypotheses were correct. Structural equation modeling is a type of general statistical analysis that seeks to do three things: (1) establish linear associations between independent and dependent variables; (2) estimate the effects of all variables on one another; and (3) investigate the connections between overt and covert factors [44]. One of the most significant advantages of SEM over other methods is that measurement errors are effectively taken into account in the analysis. Being a statistical technique, it allows for precise evaluation of the interdependent effects of various structural elements. Furthermore, structural equation modeling (SEM) employs a variety of quantitative statistical tests to investigate the convergent, discriminant, and internal consistency validity of a construct. [41]. Different goodness-of-fit indices and the statistical functions they provide are taken into account when deciding whether structural equation models are a good fit for the data. Most commonly employed indices include the Chi-square statistics, RMSEA (Root-mean-square error approximation), GFI (Goodness-of-fit index), CFI (Comparative Fit Index), NFI (The Normed Fit Index), and TLI (Tucker–Lewis Index) [45]. The Normed Fit Index and the Tucker–Lewis Index are two alternative indices that have been proposed. Models are considered to be a good fit for the data when their CFI, NFI, and TLI values are close to 1, which is a value that shows perfect fit. RMSEA values showing excellent fits are those equal to or less than 0.05, and values showing an acceptable fit fall between 0.08 and 0.10. Values showing a poor fit fall above 0.10 [46].
4. Results
Some demographic characteristics of the participants are given in Table 1.
Before putting the research model to the test, we ensured the scales we were using were reliable and valid. To what extent the latent structure of the variables contributes to the total variance is indicated by the Kaiser–Meyer–Olkin (KMO) value. For adequate sampling, it needs to be as high as possible (>0.70) [47]. Then, the research scales were examined for their construct validity and reliability. Exploratory and confirmatory factor analyses, as well as reliability analyses, were conducted for this purpose. Table 2 displays the results of the EFA performed on the scales.
Except for the second and tenth items of the Trust in Industrial Human–Robot Collaboration factor, all factor loads were above 0.50. Here, we excluded them. Above 0.70 was the KMO value. Results from the Barlett sphericity test were found to be statistically significant. Since the sample size is large enough, factor analysis can be performed. The results showed that the various scales could account for more than half of the variation. Kurtosis and skewness values were calculated to be from −2 to +2. The data are normally distributed, as showed by this result.
The weighing scales were subjected to CFA after the EFA had been completed. Table 3 displays the obtained goodness-of-fit values.
The results of the CFA indicated the scales had sufficient goodness of fit.
After completing EFA and CFA, the scales’ reliability was evaluated.
Table 4 displays the results of the reliability analysis and the component validity test, including the alpha coefficient value, average variance explained, and composite reliability.
Regarding reliability, the analysis yielded alpha values greater than 0.70. This result shows the validity of the scales. If the obtained AVE is greater than 0.50 and the CR is greater than 0.70, then the scales are valid and reliable.
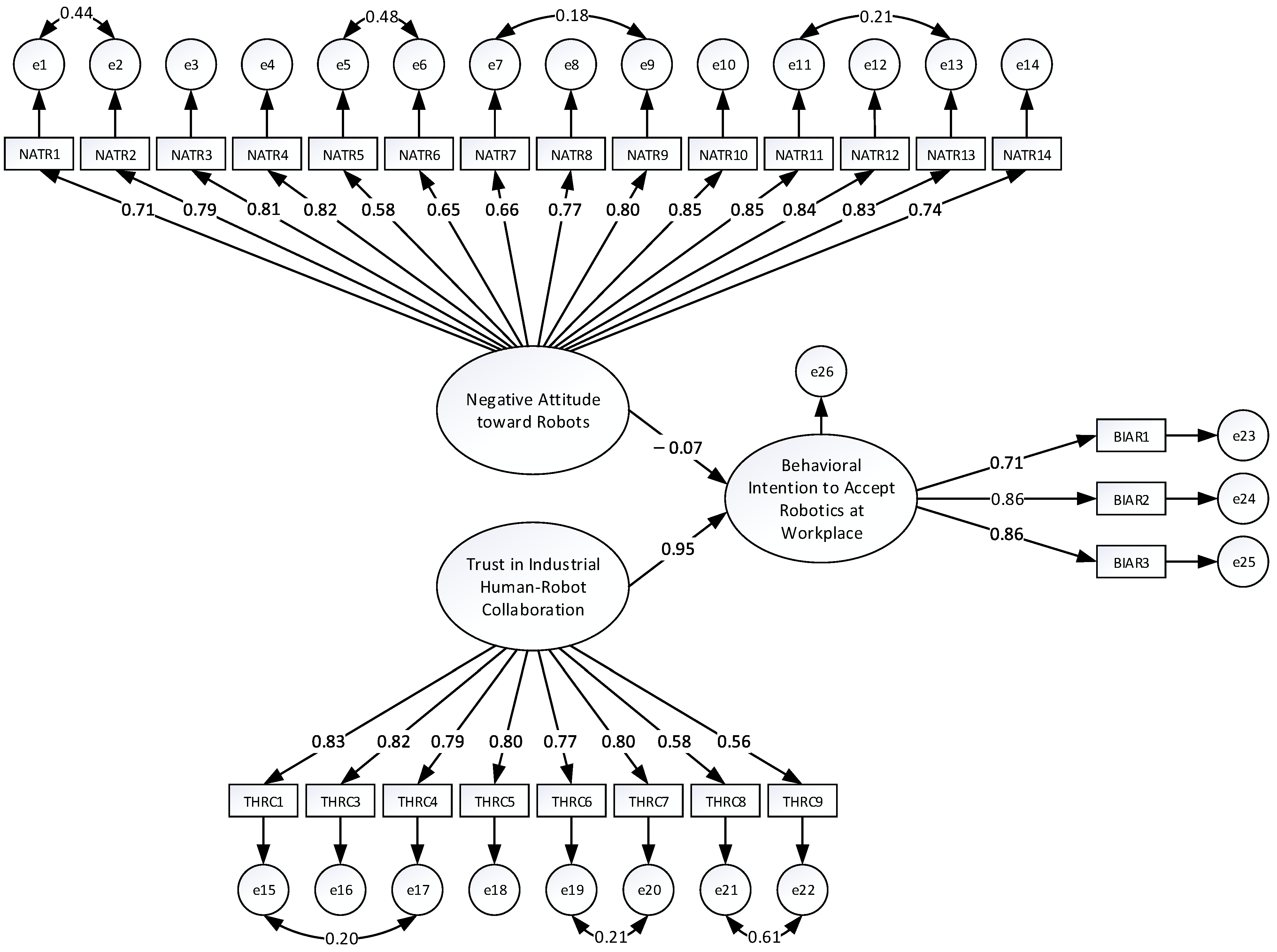
After completing the construct validity and reliability analyses, a structural equation model analysis was performed to test the hypotheses. The model under analysis is depicted in Figure 2.
Table 5 displays the model’s goodness-of-fit statistics.
The analysis revealed that the model satisfied the necessary goodness-of-fit conditions.
Table 6 displays the outcomes of the model’s analysis.
The findings showed that negative attitudes toward robots had a negative effect on workers’ willingness to integrate them into their daily routines. Furthermore, trust in human–robot cooperation positively impacted behavioral intention toward acceptance of robots in the workplace. The data analysis verified both H1 and H2.
5. Discussion
5.1. Theoretical Implications
In this study, we investigated employees’ intentions to use industrial robots in their workplaces. To begin, we used a research model to analyze how employees’ perceptions of robots and the reliability of their interpersonal interactions with robots affected their interest in using industrial robots. Competition in the market and among businesses has increased in recent years as a result of factors including rising consumer awareness [48], the growing trend of mass privatization of products [49], and epidemics, crises, and market fluctuations [50]. Companies are under pressure to differentiate themselves from the competition by providing customized products to customers in record time. This situation calls for a highly adaptable and productive manufacturing process. Human–robot collaboration has emerged as a new paradigm in manufacturing thanks to the combination of humans’ flexibility and robots’ efficiency. However, it is challenging for a robot to communicate with and work alongside humans. For working together as a group, humans have the option of using their voices, gestures, and actions to convey meaning. However, without context awareness, robots working alongside humans cannot communicate effectively [49].
More and more researchers are focusing on context-awareness in the human–robot collaboration system to boost robots’ cognitive abilities and bring them closer to their aim of autonomous learning and decision-making. In addition, there has been a rise in the number of studies investigating using brain signals to control robots. Human and robotic labor can be better distributed, and operational efficiency can be maximized with the help of digital twin technology applied to human–robot collaboration scenarios. However, technical hurdles still exist when mapping real and virtual space for engineering applications [51].
As we argued in the hypotheses, in this case, the trust employees have in robots will positively impact the use of robots in the workplace. Furthermore, the opposite will be confirmed if employees have negative attitudes toward robots. The reports [12,15,16,17,24] all provide evidence supporting this conclusion. There are numerous studies examining the psychological aspects of human–robot interaction [52,53,54,55,56,57,58,59,60,61]. Most of these studies are based on scenarios where people might avoid interacting (for example, studies involving the service industry where the human side is customers, patients, etc.). There are few studies involving scenarios in which humans must interact with robots (integration of robot workers in the manufacturing industry). We believe that our research findings contribute to the existing body of knowledge regarding this subject.
5.2. Managerial Implications
Some suggestions for the field accompany the theoretical findings of this study. Keeping up with the rapid pace of technological development is essential for the success of businesses today [17]. Industrial production is evolving under the umbrella of Industry 4.0, which uses systems such as big data and the IoT [62], which requires the adoption of smarter, more flexible systems such as multi-purpose robots that do not require task-specific programming [63]. Hedelind & Jackson [20] argue that companies with higher labor costs can be challenged by those who use more automated production systems.
Industrial robots are common in factories worldwide [64]. Digital transformation has introduced a new dimension to the traditional division of labor between humans and innovative technologies [17]. With the advancement of technology, the human–robot cooperation system is being highlighted in daily applications and especially in industrial scenes [65]. There is no need to keep humans and robots on separate teams in collaborative manufacturing, as both can work together in the same environment at the same time [66]. Smart factories, in particular, cannot get by without robots, but they also benefit from enhanced human–robot collaboration. Humans and machines must work side by side in today’s smart factories. Robots can augment human senses and capabilities to free up human beings for more nuanced and mental labor. In addition, robots should be built to provide the right amount of assistance to human workers as they perform a task, thereby maximizing efficiency [67].
Businesses serious about integrating industrial robots into their operations must audit how their staff thinks and feels about robots, both in the complex and soft sciences. Physical factors show that the time-honored practice of isolating industrial robots from human workers for their protection has some practical applications. Let us say it turns out that recent advances in socially interactive robots can be combined with efforts to develop more collaborative robots. If that happens, human beings will have no choice but to collaborate even more closely with robots than they have in the past. However, responses to robots in the workplace can be influenced by social and psychological processes, including the fear of being replaced by robots. Thus, employees must adapt to new social and psychological challenges when interacting closely with robots [26]. This conclusion is supported by both our research and previous ones. In some types of hybrid manufacturing, the industrial robot’s workspace will not have a protective enclosure. Using industrial robots to aid human workers in a collaborative production environment is essential. Human–robot collaboration increases manufacturing flexibility and productivity by combining the adaptability of humans with the efficiency of industrial robots. However, industrial robots must perform assigned tasks to ensure operator safety during production operations. Therefore, for the sake of human–robot collaboration applications’ security, industrial robots need sensing and decision-making capabilities [64]. Having large datasets from a physics-based simulation or a real-world experiment is also necessary for teaching robots how to adapt. Collecting data in a simulation is typically more efficient and less expensive than in the real world [63].
Robotic systems can make up for what humans lack in strength and precision with their advantages in fatigue resistance, speed, repeatability, and productivity. There are numerous ways in which human beings and robots complement one another [65]. Robots have greater adaptability than humans because they can be programmed to function outside of typical human limitations. They are flexible workers capable of handling various responsibilities in different settings. Because of their superior performance in dangerous environments, robots can replace humans in many high-risk occupations. Because of how vital worker safety is to most businesses, this feature is useful. As a result, it will significantly cut down on the number of workplace accidents and the costs associated with them [12].
Regarding teamwork, human–robot communication is widely regarded as the missing link that unlocks latent human and robotic potential [65]. Robots can be more powerful and accurate, while human operators can bring problem-solving expertise to the table. Combining the efforts of humans and robots can boost manufacturing efficiency even further [66].
However, the trust humans have in robots is an issue that cannot be ignored once it impacts productivity. When people cannot foresee a robotic system’s actions, their confidence levels drop. Similarly, when people lose faith in the robot, they no longer believe it is trustworthy. Thus, human–robot teams can only function appropriately if members’ faith in the robots’ abilities is adequately calibrated [35]. Further, it is crucial to raise staff’s understanding of the relevant technology. There needs to be a more intensive training program for blue-collar workers in this area. Intuitive robot systems, for which they can learn to program and operate, are just one example. Feelings of insecurity can be exacerbated when digital technologies are introduced into previously human-only workplaces. Blue-collar workers are the ones who stand to lose their jobs first because of the rise of such technologies [17].
6. Conclusions
This study investigated the effects of employees’ negative attitudes towards industrial robots and their trust in human–robot cooperation on their intention to use industrial robots. As a result of the structural equation model analysis, it was determined that the negative attitudes toward robots significantly affected the intention to use them. It was found that trust in human–robot cooperation also significantly affects the intention to use them.
The results of the research show that the psychological state of employees in workplaces related to robot technology affects their level of use of this technology. This finding shows that different dynamics (employees’ attitudes and the confidence they feel), rarely mentioned in the literature, motivate and demotivate employees to use industrial robots. The findings of this study provide important insights for organizations seeking to adopt industrial robots in manufacturing. Negative attitudes towards robots can hinder their adoption, and organizations should take steps to address these attitudes. One way to address negative attitudes is to provide training and education to employees about the benefits of industrial robots. Trust in robots is also important for their acceptance, and organizations should focus on building trust among employees.
This study contributes essentially to the literature and differentiates it from existing studies. Companies that want to integrate robotic technologies into their processes should especially consider the psychological state of their employees. In order to ensure successful integration, training on industrial robots should be provided, and psychological support should be provided to the employees.
This research has several limitations. The most significant limitation of this study is the use of questionnaires to collect data, as the information obtained is limited to the questions asked. Getting the sample from a single country is another limitation of the study. This study is concentrated on the manufacturing sector. For future research, we propose reexamining the study variables and modeling samples from various developing countries and industries. In future studies, the effects of variables within the scope of technology acceptance models (such as performance expectancy, effort expectancy, social influence, perceived ease of use) on behavioral intention can be investigated. One of the limitations of this study is that the sample was determined from companies operating in the electronics and machinery manufacturing sector. In future studies, sectors such as the automotive sector, where the use of robots is quite intense, can be examined. When researchers with access to larger samples conduct cross-country comparisons, the cultural aspect of robot acceptance will become apparent. It is believed that country comparisons will make significant contributions to the literature. If we note another situation that can be considered as one of the limitations of the study, analyses related to demographic variables were excluded in order not to lose the focus of the study and because it could be the subject of another one. Future research could also investigate the impact of specific personalities on the acceptance of industrial robots in the context of human–robot collaboration. It would also be interesting to examine whether there are significant differences in robot acceptance between sexes and in connection with age and level of education. Finally, further research could focus on the emotional attachment of employees towards robots and how it affects their acceptance.
Author Contributions
Conceptualization, Ş.Ç. and I.M.-K.; methodology, B.Y.; software, Ş.Ç.; validation, I.M.-K. and B.Y.; formal analysis, B.Y.; investigation, I.M.-K.; resources, Ş.Ç.; data curation, B.Y.; writing—original draft preparation, Ş.Ç. and B.Y.; writing—review and editing, I.M.-K.; visualization, Ş.Ç.; super-vision I.M.-K. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The data of this study are available from the authors upon request.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A

{kind=link}
{kind=link}
Table A1.
Measurement Instrument.
| Negative Attitude toward Robots | |
|---|---|
| NATR1 | I would feel uneasy if robots really had emotions. |
| NATR2 | Something bad might happen if robots developed into living beings. |
| NATR3 | I would feel relaxed talking with robots. * |
| NATR4 | I would feel uneasy if I was given a job where I had to use robots. |
| NATR5 | If robots had emotions, I would be able to make friends with them. * |
| NATR6 | I feel comforted being with robots that have emotions. * |
| NATR7 | The word “robot” means nothing to me. |
| NATR8 | I would feel nervous operating a robot in front of other people. |
| NATR9 | I would hate the idea that robots or artificial intelligences were making judgments about things. |
| NATR10 | I would feel very nervous just standing in front of a robot. |
| NATR11 | I feel that if I depend on robots too much, something bad might happen. |
| NATR12 | I would feel paranoid talking with a robot. |
| NATR13 | I am concerned that robots would be a bad influence on children. |
| NATR14 | I feel that in the future society will be dominated by robots. |
| Trust in Industrial Human–Robot Collaboration | |
| THRC1 | The way the robot moved made me uncomfortable * |
| THRC2 | The speed at which the gripper picked up and released the components made me uneasy |
| THRC3 | I trusted that the robot was safe to cooperate with |
| THRC4 | I was comfortable the robot would not hurt me |
| THRC5 | The size of the robot did not intimidate me |
| THRC6 | I felt safe interacting with the robot |
| THRC7 | I knew the gripper would not drop the components |
| THRC8 | The robot gripper did not look reliable |
| THRC9 | The gripper seemed like it could be trusted |
| THRC10 | I felt I could rely on the robot to do what it was supposed to do |
| Behavioral Intention to accept robotics at workplace | |
| BIAR1 | I am likely to interact with robotics in my workplace. |
| BIAR2 | I will feel happy to interact with robotics in my workplace. |
| BIAR3 | I am willing to accept robotics in my workplace. |
* Reverse questions.
References
- Pereira, V.; Hadjielias, E.; Christofi, M.; Vrontis, D. A systematic literature review on the impact of artificial intelligence on workplace outcomes: A multi-process perspective. Hum. Resour. Manag. Rev. 2021, 33, 100857. [Google Scholar] [CrossRef]
- Çiğdem, Ş. From EDI to Blockchain: A Bibliometric Analysis of Digitalization in Supply Chains. Gaziantep Univ. J. Soc. Sci. 2021, 20, 657–677. [Google Scholar] [CrossRef]
- Savela, N.; Oksanen, A.; Pellert, M.; Garcia, D. Emotional reactions to robot colleagues in a role-playing experiment. Int. J. Inf. Manag. 2021, 60, 102361. [Google Scholar] [CrossRef]
- Meidute-Kavaliauskiene, I.; Çiğdem, Ş.; Yıldız, B.; Davidavicius, S. The Effect of Perceptions on Service Robot Usage Intention: A Survey Study in the Service Sector. Sustainability 2021, 13, 9655. [Google Scholar] [CrossRef]
- Srinivas Aditya, U.S.P.; Singh, R.; Singh, P.K.; Kalla, A. A Survey on Blockchain in Robotics: Issues, Opportunities, Challenges and Future Directions. J. Netw. Comput. Appl. 2021, 196, 103245. [Google Scholar] [CrossRef]
- Sinha, N.; Singh, P.; Gupta, M.; Singh, P. Robotics at workplace: An integrated Twitter analytics—SEM based approach for behavioral intention to accept. Int. J. Inf. Manag. 2020, 55, 102210. [Google Scholar] [CrossRef]
- Ballestar, M.T.; Díaz-Chao, Á.; Sainz, J.; Torrent-Sellens, J. Impact of robotics on manufacturing: A longitudinal machine learning perspective. Technol. Forecast. Soc. Chang. 2021, 162, 120348. [Google Scholar] [CrossRef]
- Dianatfar, M.; Latokartano, J.; Lanz, M. Review on existing VR/AR solutions in human–robot collaboration. Procedia CIRP 2021, 97, 407–411. [Google Scholar] [CrossRef]
- Segura, P.; Lobato-Calleros, O.; Ramírez-Serrano, A.; Soria, I. Human-robot collaborative systems: Structural components for current manufacturing applications. Adv. Ind. Manuf. Eng. 2021, 3, 100060. [Google Scholar] [CrossRef]
- Landi, C.T.; Villani, V.; Ferraguti, F.; Sabattini, L.; Secchi, C.; Fantuzzi, C. Relieving operators’ workload: Towards affective robotics in industrial scenarios. Mechatronics 2018, 54, 144–154. [Google Scholar] [CrossRef]
- Villani, V.; Pini, F.; Leali, F.; Secchi, C. Survey on human–robot collaboration in industrial settings: Safety, intuitive interfaces and applications. Mechatronics 2018, 55, 248–266. [Google Scholar] [CrossRef]
- Bagdasarov, Z.; Martin, A.A.; Buckley, M.R. Working with robots: Organizational considerations. Organizational Dynamics. Organ. Dyn. 2018, 49, 100679. [Google Scholar] [CrossRef]
- Paliga, M.; Pollak, A. Development and validation of the fluency in human-robot interaction scale. A two-wave study on three perspectives of fluency. Int. J. Hum.-Comput. Stud. 2021, 155, 102698. [Google Scholar] [CrossRef]
- Taherdoost, H. A review of technology acceptance and adoption models and theories. Procedia Manuf. 2018, 22, 960–967. [Google Scholar] [CrossRef]
- Nomura, T.; Suzuki, T.; Kanda, T.; Kato, K. Altered attitudes of people toward robots: Investigation through the Negative Attitudes toward Robots Scale. In Proceedings of the AAAI-06 Workshop on Human Implications of Human-Robot Interaction, Boston, MA, USA, 16–17 July 2006; pp. 29–35. [Google Scholar]
- Park, E.; del Pobil, A.P. Users’ attitudes toward service robots in South Korea. Ind. Robot. Int. J. Robot Res. Appl. 2013, 40, 77–87. [Google Scholar] [CrossRef]
- Hampel, N.; Sassenberg, K. Needs-oriented communication results in positive attitudes towards robotic technologies among blue-collar workers perceiving low job demands. Comput. Hum. Behav. Rep. 2021, 3, 100086. [Google Scholar] [CrossRef]
- Bisen, A.S.; Payal, H. Collaborative robots for industrial tasks: A review. Mater. Today Proc. 2022, 52, 500–504. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Substantial capabilities of robotics in enhancing industry 4.0 implementation. Cogn. Robot. 2021, 1, 58–75. [Google Scholar] [CrossRef]
- Hedelind, M.; Jackson, M. How to improve the use of industrial robots in lean manufacturing systems. J. Manuf. Technol. Manag. 2011, 22, 891–905. [Google Scholar] [CrossRef]
- Roveda, L.; Magni, M.; Cantoni, M.; Piga, D.; Bucca, G. Human–robot collaboration in sensorless assembly task learning enhanced by uncertainties adaptation via Bayesian Optimization. Robot. Auton. Syst. 2021, 136, 103711. [Google Scholar] [CrossRef]
- Blayone, T.J.; Mykhailenko, O.; Usca, S.; Abuze, A.; Romanets, I.; Oleksiiv, M. Exploring technology attitudes and personal–cultural orientations as student readiness factors for digitalised work. High. Educ. Ski. Work. Learn. 2020, 11, 649–671. [Google Scholar] [CrossRef]
- Dobra, Z.; Dhir, K.S. Technology jump in the industry: Human–robot cooperation in production. Ind. Robot. Int. J. Robot Res. Appl. 2020, 47, 757–775. [Google Scholar] [CrossRef]
- Venkatesh, V.; Thong, J.; Xu, X. Unified Theory of Acceptance and Use of Technology: A Synthesis and the Road Ahead. J. Assoc. Inf. Syst. 2016, 17, 328–376. [Google Scholar] [CrossRef]
- Porubčinová, M.; Fidlerová, H. Determinants of Industry 4.0 Technology Adaption and Human—Robot Collaboration. Res. Pap. Fac. Mater. Sci. Technol. Slovak Univ. Technol. 2020, 28, 10–21. [Google Scholar] [CrossRef]
- Savela, N.; Kaakinen, M.; Ellonen, N.; Oksanen, A. Sharing a work team with robots: The negative effect of robot co-workers on in-group identification with the work team. Comput. Hum. Behav. 2021, 115, 106585. [Google Scholar] [CrossRef]
- You, S.; Kim, J.-H.; Lee, S.; Kamat, V.; Robert, L.P. Enhancing perceived safety in human–robot collaborative construction using immersive virtual environments. Autom. Constr. 2018, 96, 161–170. [Google Scholar] [CrossRef]
- Möller, R.; Furnari, A.; Battiato, S.; Härmä, A.; Farinella, G.M. A survey on human-aware robot navigation. Robot. Auton. Syst. 2021, 145, 103837. [Google Scholar] [CrossRef]
- Kim, W.; Kim, N.; Lyons, J.B.; Nam, C.S. Factors affecting trust in high-vulnerability human-robot interaction contexts: A structural equation modelling approach. Appl. Ergon. 2020, 85, 103056. [Google Scholar] [CrossRef] [PubMed]
- Tussyadiah, I.P.; Zach, F.J.; Wang, J. Do travelers trust intelligent service robots? Ann. Tour. Res. 2020, 81, 102886. [Google Scholar] [CrossRef]
- Kim, K.J.; Park, E.; Sundar, S.S. Caregiving role in human–robot interaction: A study of the mediating effects of perceived benefit and social presence. Comput. Hum. Behav. 2013, 29, 1799–1806. [Google Scholar] [CrossRef]
- Rahman, S.M.; Wang, Y. Mutual trust-based subtask allocation for human–robot collaboration in flexible lightweight assembly in manufacturing. Mechatronics 2018, 54, 94–109. [Google Scholar] [CrossRef]
- Bingol, M.C.; Aydogmus, O. Practical application of a safe human-robot interaction software. Ind. Robot. Int. J. Robot. Res. Appl. 2020, 47, 359–368. [Google Scholar] [CrossRef]
- Tung, V.W.S.; Au, N. Exploring customer experiences with robotics in hospitality. Int. J. Contemp. Hosp. Manag. 2018, 30, 2680–2697. [Google Scholar] [CrossRef]
- Simon, O.; Neuhofer, B.; Egger, R. Human-robot interaction: Conceptualising trust in frontline teams through LEGO® Serious Play®. Tour. Manag. Perspect. 2020, 35, 100692. [Google Scholar] [CrossRef]
- Liu, H.; Wang, L. Collision-free human-robot collaboration based on context awareness. Robot. Comput. Manuf. 2021, 67, 101997. [Google Scholar] [CrossRef]
- Zhang, P.; Jin, P.; Du, G.; Liu, X. Ensuring safety in human-robot coexisting environment based on two-level protection. Ind. Robot. Int. J. Robot. Res. Appl. 2016, 43, 264–273. [Google Scholar] [CrossRef]
- Fratczak, P.; Goh, Y.M.; Kinnell, P.; Justham, L.; Soltoggio, A. Robot apology as a post-accident trust-recovery control strategy in industrial human-robot interaction. Int. J. Ind. Ergon. 2021, 82, 103078. [Google Scholar] [CrossRef]
- Charalambous, G.; Fletcher, S.; Webb, P. The Development of a Scale to Evaluate Trust in Industrial Human-robot Collaboration. Int. J. Soc. Robot. 2016, 8, 193–209. [Google Scholar] [CrossRef]
- Field, A. Discovering Statistics Using IBM SPSS Statistics, 5th ed.; Sage Publications: Thousand Oaks, CA, USA, 2017; ISBN 978-1-5264-1952-1. [Google Scholar]
- Fornell, C.; Larcker, D.F. Structural equation models with unobservable variables and measurement error: Algebra and statistics. Struct. Equ. MODELS 1981, 18, 382–388. [Google Scholar] [CrossRef]
- Hair, J.; Anderson, R.; Black, B.; Babin, B. Multivariate Data Analysis, 8th ed.; Cengage: Andover, Hampshire, UK, 2019; ISBN 978-1-4737-5654-0. [Google Scholar]
- Huang, C.-C.; Wang, Y.-M.; Wu, T.-W.; Wang, P.-A. An empirical analysis of the antecedents and performance consequences of using the moodle platform. Int. J. Inf. Educ. Technol. 2013, 3, 217–221. [Google Scholar] [CrossRef] [Green Version]
- MacCallum, R.C.; Austin, J.T. Applications of Structural Equation Modeling in Psychological Research. Annu. Rev. Psychol. 2000, 51, 201–226. [Google Scholar] [CrossRef] [PubMed]
- Jöreskog, K.G.; Sörbom, D. LISREL 8: User’s Reference Guide; Scientific Software International: Lincolnwood, IL, USA, 1996; ISBN 978-0-89498-040-4. [Google Scholar]
- Cheng, E.W. SEM being more effective than multiple regression in parsimonious model testing for management development research. J. Manag. Dev. 2001, 20, 650–667. [Google Scholar] [CrossRef]
- Lloret, S.; Ferreres, A.; Hernandez, A.; Tomás, I. El análisis factorial exploratorio de los ítems: Análisis guiado según los datos empíricos y el software. Ann. Psychol. 2017, 33, 417–432. [Google Scholar] [CrossRef] [Green Version]
- Meidute-Kavaliauskiene, I.; Yıldız, B.; Çiğdem, Ş.; Činčikaitė, R. Do People Prefer Cars That People Don’t Drive? A Survey Study on Autonomous Vehicles. Energies 2021, 14, 4795. [Google Scholar] [CrossRef]
- Wen, X.; Chen, H. 3D long-term recurrent convolutional networks for human sub-assembly recognition in human-robot collaboration. Assem. Autom. 2020, 40, 655–662. [Google Scholar] [CrossRef]
- Meidute-Kavaliauskiene, I.; Yıldız, B.; Çiğdem, Ş.; Činčikaitė, R. The Effect of COVID-19 on Airline Transportation Services: A Study on Service Robot Usage Intention. Sustainability 2021, 13, 12571. [Google Scholar] [CrossRef]
- Zhang, R.; Lv, Q.; Li, J.; Bao, J.; Liu, T.; Liu, S. A reinforcement learning method for human-robot collaboration in assembly tasks. Robot. Comput. Manuf. 2022, 73, 102227. [Google Scholar] [CrossRef]
- Abbass, H.A.; Scholz, J.; Reid, D.J. (Eds.) Foundations of Trusted Autonomy; Springer International Publishing: Cham, Switzerland, 2018; ISBN 978-3-319-64815-6. [Google Scholar]
- Aroyo, A.M.; Rea, F.; Sandini, G.; Sciutti, A. Trust and Social Engineering in Human Robot Interaction: Will a Robot Make You Disclose Sensitive Information, Conform to Its Recommendations or Gamble? IEEE Robot. Autom. Lett. 2018, 3, 3701–3708. [Google Scholar] [CrossRef]
- Belpaeme, T. Advice to New Human-Robot Interaction Researchers. In Human-Robot Interaction: Evaluation Methods and Their Standardization; Jost, C., Le Pévédic, B., Belpaeme, T., Bethel, C., Chrysostomou, D., Crook, N., Grandgeorge, M., Mirnig, N., Eds.; Springer series on bio- and neurosystems; Springer: Cham, Switzerland, 2020; ISBN 978-3-030-42306-3. [Google Scholar]
- Guo, Y.; Shi, C.; Yang, X.J. Reverse Psychology in Trust-Aware Human-Robot Interaction. IEEE Robot. Autom. Lett. 2021, 6, 4851–4858. [Google Scholar] [CrossRef]
- Irfan, B.; Kennedy, J.; Lemaignan, S.; Papadopoulos, F.; Senft, E.; Belpaeme, T. Social Psychology and Human-Robot Inter-action. In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, HRI’18: ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; Kanda, T., Ŝabanović, S., Hoffman, G., Tapus, A., Eds.; ACM: New York, NY, USA, 2018; pp. 13–20, ISBN 9781450356152. [Google Scholar]
- de Kervenoael, R.; Hasan, R.; Schwob, A.; Goh, E. Leveraging human-robot interaction in hospitality services: Incorporating the role of perceived value, empathy, and information sharing into visitors’ intentions to use social robots. Tour. Manag. 2020, 78, 104042. [Google Scholar] [CrossRef]
- Krutova, O.; Turja, T.; Koistinen, P.; Melin, H.; Särkikoski, T. Job insecurity and technology acceptance: An asymmetric dependence. J. Inf. Commun. Ethic Soc. 2021, 20, 110–133. [Google Scholar] [CrossRef]
- Lin, Y.; Luo, J.; Cai, S.; Ma, S.; Rong, K. Exploring the service quality in the e-commerce context: A triadic view. Ind. Manag. Data Syst. 2016, 116, 388–415. [Google Scholar] [CrossRef]
- Natarajan, M.; Gombolay, M. Effects of Anthropomorphism and Accountability on Trust in Human Robot Interaction. In Proceedings of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, HRI ‘20: ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; Belpaeme, T., Young, J., Gunes, H., Riek, L., Eds.; ACM: New York, NY, USA, 2020; pp. 33–42, ISBN 9781450367462. [Google Scholar]
- Ullrich, D.; Butz, A.; Diefenbach, S. The Development of Overtrust: An Empirical Simulation and Psychological Analysis in the Context of Human–Robot Interaction. Front. Robot. AI 2021, 8, 554578. [Google Scholar] [CrossRef] [PubMed]
- Kalsoom, T.; Ahmed, S.; Rafi-Ul-Shan, P.M.; Azmat, M.; Akhtar, P.; Pervez, Z.; Imran, M.A.; Ur-Rehman, M. Impact of IoT on Manufacturing Industry 4.0: A New Triangular Systematic Review. Sustainability 2021, 13, 12506. [Google Scholar] [CrossRef]
- Mukherjee, D.; Gupta, K.; Chang, L.H.; Najjaran, H. A Survey of Robot Learning Strategies for Human-Robot Collaboration in Industrial Settings. Robot. Comput. Manuf. 2022, 73, 102231. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, Z.; Xiong, B.; Xu, W.; Liu, Y. Deep reinforcement learning-based safe interaction for industrial human-robot collaboration using intrinsic reward function. Adv. Eng. Inform. 2021, 49, 101360. [Google Scholar] [CrossRef]
- Kuang, Y.; Cheng, H.; Zheng, Y.; Cui, F.; Huang, R. One-shot gesture recognition with attention-based DTW for human-robot collaboration. Assem. Autom. 2019, 40, 40–47. [Google Scholar] [CrossRef]
- Li, S.; Wang, R.; Zheng, P.; Wang, L. Towards proactive human–robot collaboration: A foreseeable cognitive manufacturing paradigm. J. Manuf. Syst. 2021, 60, 547–552. [Google Scholar] [CrossRef]
- Prati, E.; Peruzzini, M.; Pellicciari, M.; Raffaeli, R. How to include User eXperience in the design of Human-Robot Interaction. Robot. Comput. Manuf. 2021, 68, 102072. [Google Scholar] [CrossRef]
Figure 1.
Research Model.

Figure 2.
Structural equation model.

Table 1.
Demographic Characteristics of Respondents.
| Frequency | Percent | |
|---|---|---|
| Female | 244 | 48.9 |
| Male | 255 | 51.1 |
| Total | 499 | 100.0 |
| 18–25 | 128 | 25.7 |
| 26–35 | 173 | 34.7 |
| 36–45 | 142 | 28.5 |
| 46–55 | 41 | 8.2 |
| 56 and above | 15 | 3.0 |
| Total | 499 | 100.0 |
| Primary education | 45 | 9.0 |
| High school | 227 | 45.5 |
| College | 61 | 12.2 |
| Faculty | 135 | 27.1 |
| Master/Doctorate | 31 | 6.2 |
| Total | 499 | 100.0 |
| Worker | 319 | 63.9 |
| Technician/Foreman | 121 | 24.2 |
| Engineer | 59 | 11.8 |
| Total | 499 | 100.0 |
Table 2.
Exploratory Factor Analysis.
| Negative Attitude toward Robots | Fac. Load. | Skew. | Kurt. | Mean | Std. Dev. |
|---|---|---|---|---|---|
| NATR1 | 0.748 | 0.418 | −1.026 | 2.62 | 1.265 |
| NATR2 | 0.816 | 0.284 | −1.105 | 2.69 | 1.283 |
| NATR3 | 0.824 | 0.381 | −0.904 | 2.60 | 1.197 |
| NATR4 | 0.832 | 0.654 | −0.679 | 2.31 | 1.245 |
| NATR5 | 0.646 | 0.404 | −0.778 | 2.64 | 1.183 |
| NATR6 | 0.704 | 0.417 | −1.001 | 2.48 | 1.273 |
| NATR7 | 0.686 | 0.716 | −0.188 | 2.36 | 1.107 |
| NATR8 | 0.782 | 0.618 | −0.508 | 2.40 | 1.179 |
| NATR9 | 0.817 | 0.455 | −0.633 | 2.52 | 1.162 |
| NATR10 | 0.849 | 0.707 | −0.534 | 2.39 | 1.215 |
| NATR11 | 0.862 | 0.524 | −0.767 | 2.45 | 1.202 |
| NATR12 | 0.840 | 0.698 | −0.433 | 2.39 | 1.169 |
| NATR13 | 0.841 | 0.516 | −0.712 | 2.49 | 1.188 |
| NATR14 | 0.764 | 0.400 | −0.942 | 2.54 | 1.250 |
| KMO: 0.956 Approx. Chi-Square: 5441.442 df:91 sig.: 0.000 Total Variance Explained: % 62.276 | |||||
| Trust in Industrial Human–Robot Collaboration | Fac. Load. | Skew. | Kurt. | Mean | Std. Dev. |
| THRC1 | 0.836 | −0.832 | −0.068 | 3.59 | 1.105 |
| THRC2 | |||||
| THRC3 | 0.813 | −0.774 | 0.127 | 3.55 | 1.047 |
| THRC4 | 0.805 | −0.667 | −0.214 | 3.50 | 1.095 |
| THRC5 | 0.820 | −0.678 | −0.517 | 3.51 | 1.238 |
| THRC6 | 0.807 | −0.554 | −0.503 | 3.57 | 1.157 |
| THRC7 | 0.846 | −0.534 | −0.404 | 3.59 | 1.124 |
| THRC8 | 0.703 | −0.354 | −0.823 | 3.35 | 1.195 |
| THRC9 | 0.691 | −0.333 | −0.858 | 3.34 | 1.198 |
| THRC10 | |||||
| KMO: 0.889 Approx. Chi-Square: 2621.444 df:28 sig.: 0.000 Total Variance Explained: % 62.764 | |||||
| Behavioral Intention to accept robotics in the workplace | Fac. Load. | Skew. | Kurt. | Mean | Std. Dev. |
| BIAR1 | 0.844 | −0.573 | −0.597 | 3.51 | 1.164 |
| BIAR2 | 0.901 | −0.692 | −0.347 | 3.53 | 1.146 |
| BIAR3 | 0.900 | −0.747 | −0.209 | 3.59 | 1.148 |
| KMO: 0.717 Approx. Chi-Square: 698.730 df:3 sig.: 0.000 Total Variance Explained: % 77.756 | |||||
Table 3.
CFA Goodness of Fit Values.
| Variable | χ2 | df | χ2/df | GFI | CFI | NFI | RMSEA |
|---|---|---|---|---|---|---|---|
| Criterion | ≤5 | ≥0.85 | ≥0.90 | ≥0.90 | ≤0.08 | ||
| Negative Attitude toward Robots | 310.352 | 75 | 4.138 | 0.916 | 0.957 | 0.944 | 0.079 |
| Trust in Industrial Human–Robot Collaboration | 65.147 | 16 | 4.072 | 0.97 | 0.981 | 0.975 | 0.079 |
| Behavioral Intention to Accept Robotics in the Workplace | 0 | 0 | - | 1 | 1 | 1 | 0 |
Table 4.
Validity and Reliability.
| Variable | AVE | CR | Cronbach’s Alpha |
|---|---|---|---|
| Negative Attitude toward Robots | 0.59 | 0.952 | 0.953 |
| Trust in Industrial Human–Robot Collaboration | 0.55 | 0.905 | 0.913 |
| Behavioral Intention to accept robotics in the workplace | 0.671 | 0.859 | 0.856 |
Table 5.
The Goodness of Fit Values of the Research Model.
| Variable | χ2 | df | χ2/df | GFI | CFI | NFI | RMSEA |
|---|---|---|---|---|---|---|---|
| Criterion | ≤5 | ≥0.85 | ≥0.90 | ≥0.90 | ≤0.08 | ||
| Modal | 667.153 | 266 | 2.508 | 0.9 | 0.958 | 0.933 | 0.056 |
Table 6.
SEM Regression Results.
| Est. | S.E. | C.R. | P | |||
|---|---|---|---|---|---|---|
| BIAR | <--- | NATR | −0.067 | 0.027 | −2.191 | 0.028 |
| BIAR | <--- | THRC | 0.953 | 0.101 | 11.544 | *** |
*** p < 0.001.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Çiğdem, Ş.; Meidute-Kavaliauskiene, I.; Yıldız, B. Industry 4.0 and Industrial Robots: A Study from the Perspective of Manufacturing Company Employees. Logistics 2023, 7, 17. https://doi.org/10.3390/logistics7010017
AMA Style
Çiğdem Ş, Meidute-Kavaliauskiene I, Yıldız B. Industry 4.0 and Industrial Robots: A Study from the Perspective of Manufacturing Company Employees. Logistics. 2023; 7(1):17. https://doi.org/10.3390/logistics7010017
Chicago/Turabian StyleÇiğdem, Şemsettin, Ieva Meidute-Kavaliauskiene, and Bülent Yıldız. 2023. "Industry 4.0 and Industrial Robots: A Study from the Perspective of Manufacturing Company Employees" Logistics 7, no. 1: 17. https://doi.org/10.3390/logistics7010017