

Robotics in Dentistry: A Narrative Review

Abstract
:1. Introduction
2. Materials and Methods
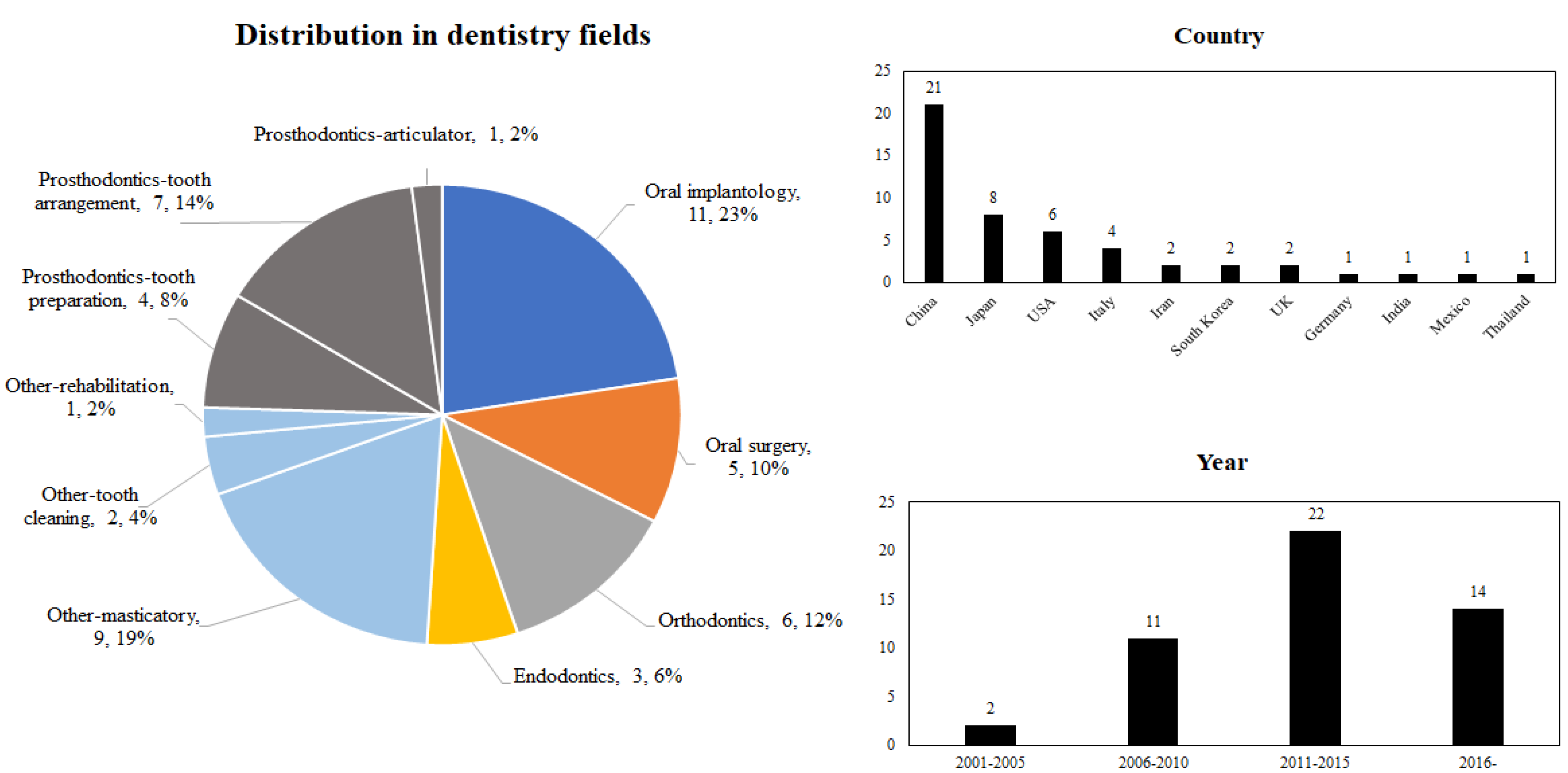
3. Results
3.1. Prosthodontics
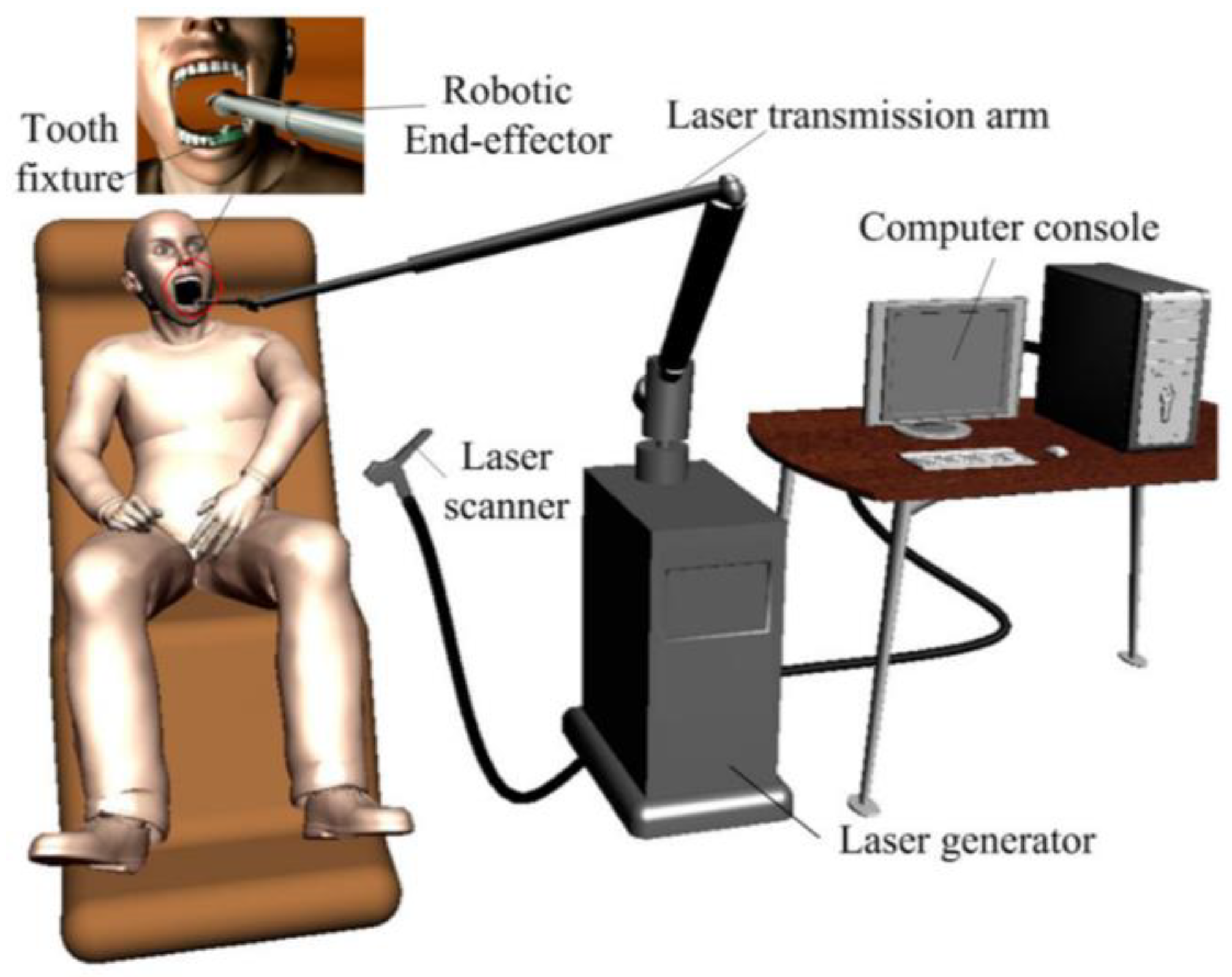
3.1.1. Tooth Preparation
3.1.2. Tooth Arrangement
3.1.3. Articulation
3.2. Oral Implantology
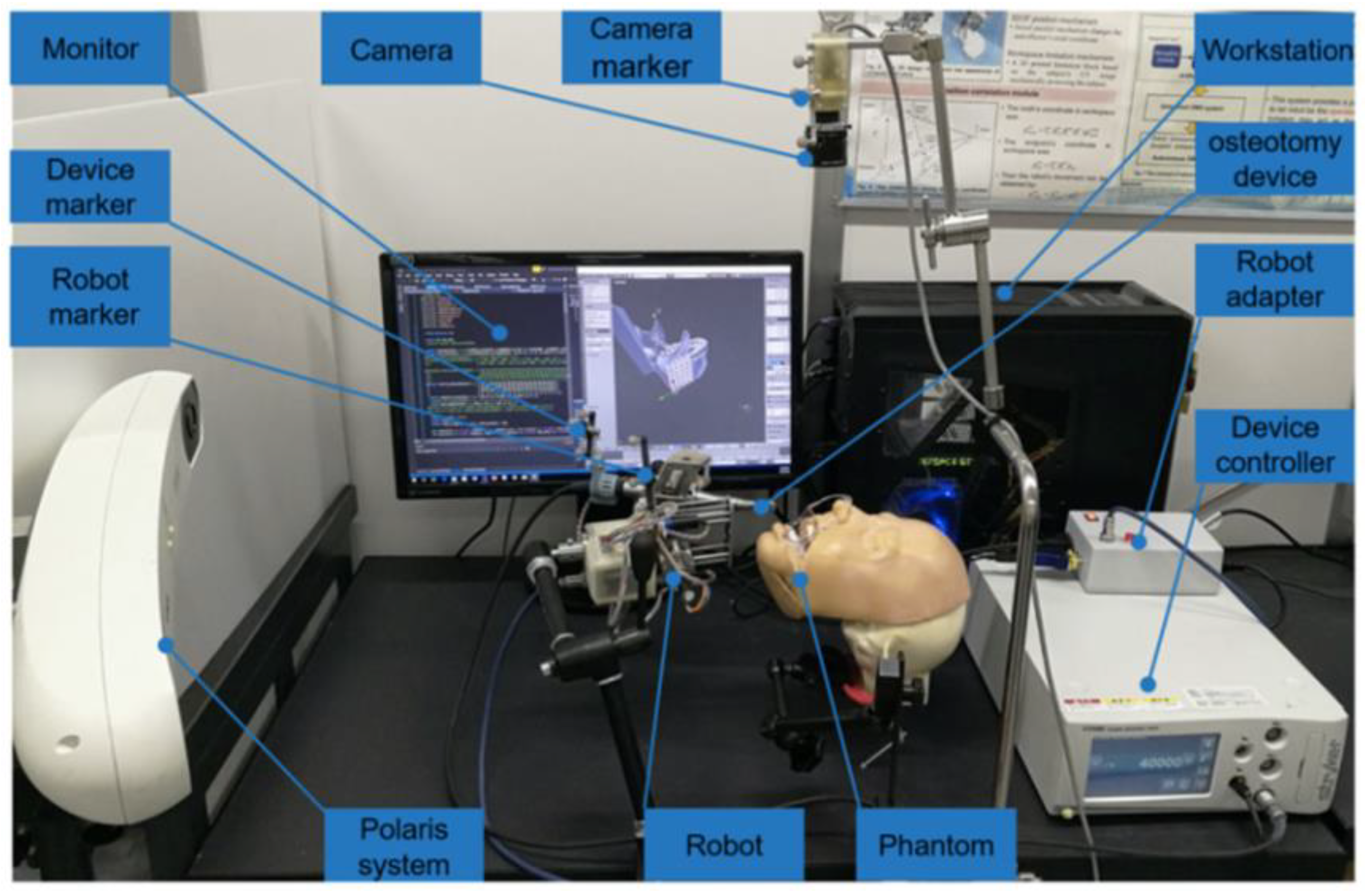
3.3. Oral Surgery
3.4. Orthodontics
3.5. Endodontics
3.6. Others
3.6.1. Mastication
3.6.2. Tooth Cleaning
3.6.3. Rehabilitation
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Almurib, H.A.; Al-Qrimli, H.F.; Kumar, N. A review of application industrial robotic design. In Proceedings of the 2011 Ninth International Conference on ICT and Knowledge Engineering, Bangkok, Thailand, 12–13 January 2012; pp. 105–112. [Google Scholar]
- Dario, P.; Guglielmelli, E.; Allotta, B.; Carrozza, M.C. Robotics for medical applications. IEEE Robot. Autom. Mag. 1996, 3, 44–56. [Google Scholar] [CrossRef]
- Nishigawa, K.; Satsuma, T.; Shigemoto, S.; Bando, E.; Nakano, M.; Ishida, O. Development of a novel articulator that reproduced jaw movement with six-degree-of-freedom. Med. Eng. Phys. 2007, 29, 615–619. [Google Scholar] [CrossRef] [PubMed]
- Zheng, G.; Gu, L.; Li, X.; Zhang, J. Computer-assisted preoperative planning and surgical navigation system in dental implantology. In Proceedings of the 2007 6th International Special Topic Conference on Information Technology Applications in Biomedicine, Tokyo, Japan, 8–11 November 2007; pp. 139–142. [Google Scholar]
- Ariji, Y.; Katsumata, A.; Ogi, N.; Izumi, M.; Sakuma, S.; Iida, Y.; Hiraiwa, Y.; Kurita, K.; Igarashi, C.; Kobayashi, K.; et al. An oral rehabilitation robot for massaging the masseter and temporal muscles: A preliminary report. Oral Radiol. 2009, 25, 53–55. [Google Scholar] [CrossRef]
- Kasahara, Y.; Kawana, H.; Usuda, S.; Ohnishi, K. Telerobotic-assisted bone-drilling system using bilateral control with feed operation scaling and cutting force scaling. Int. J. Med. Robot. Comput. Assist. Surg. 2012, 8, 221–229. [Google Scholar] [CrossRef] [Green Version]
- Jiang, J.G.; Zhang, Y.D. Motion planning and synchronized control of the dental arch generator of the tooth-arrangement robot. Int. J. Med. Robot. Comput. Assist. Surg. 2013, 9, 94–102. [Google Scholar] [CrossRef]
- Jiang, J.-G.; Zhang, Y.-D.; Jin, M.-L.; Wei, C.-G. Bending process analysis and structure design of orthodontic archwire bending robot. Int. J. Smart Home 2013, 7, 345–352. [Google Scholar] [CrossRef]
- Wang, D.; Wang, L.; Zhang, Y.; Lv, P.; Sun, Y.; Xiao, J. Preliminary study on a miniature laser manipulation robotic device for tooth crown preparation. Int. J. Med. Robot. Comput. Assist. Surg. 2014, 10, 482–494. [Google Scholar] [CrossRef]
- Sun, X.; Yoon, Y.; Li, J.; McKenzie, F.D. Automated image-guided surgery for common and complex dental implants. J. Med. Eng. Technol. 2014, 38, 251–259. [Google Scholar] [CrossRef]
- Toosi, A.; Arbabtafti, M.; Richardson, B. Virtual reality haptic simulation of root canal therapy. Applied Mechanics and Materials. Trans. Tech. Publ. 2014, 666, 388–392. [Google Scholar]
- Razavi, M.; Talebi, H.; Zareinejad, M.; Dehghan, M. A GPU-implemented physics-based haptic simulator of tooth drilling. Int. J. Med. Robot. Comput. Assist. Surg. 2015, 11, 476–485. [Google Scholar] [CrossRef]
- Usui, T.; Maki, K.; Toki, Y.; Shibasaki, Y.; Takanobu, H.; Takanishi, A.; Hatcher, D.; Miller, A. Measurement of mechanical strain on mandibular surface with mastication robot: Influence of muscle loading direction and magnitude. Orthod. Craniofacial Res. 2003, 6, 163–167. [Google Scholar] [CrossRef] [PubMed]
- Yuan, F.; Wang, Y.; Zhang, Y.; Sun, Y.; Wang, D.; Lyu, P. An automatic tooth preparation technique: A preliminary study. Sci. Rep. 2016, 6, 25281. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chao, A.H.; Weimer, K.; Raczkowsky, J.; Zhang, Y.; Kunze, M.; Cody, D.; Selber, J.C.; Hanasono, M.M.; Skoracki, R.J. Pre- programmed robotic osteotomies for fibula free flap mandible reconstruction: A preclinical investigation. Microsurgery 2016, 36, 246–249. [Google Scholar] [CrossRef] [PubMed]
- Zhu, J.H.; Deng, J.; Liu, X.J.; Wang, J.; Guo, Y.X.; Guo, C.B. Prospects of robot-assisted mandibular reconstruction with fibula flap: Comparison with a computer-assisted navigation system and freehand technique. J. Reconstr. Microsurg. 2016, 32, 661–669. [Google Scholar] [CrossRef] [Green Version]
- Sakaeda, G.; Matsubara, T.; Ishii, H.; Takanishi, A. Development of automatic teeth cleaning robot driven by cam mechanism. 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; pp. 536–540. [Google Scholar]
- Wang, L.; Wang, D.; Zhang, Y.; Ma, L.; Sun, Y.; Lv, P. An automatic robotic system for three-dimensional tooth crown preparation using a picosecond laser. Lasers Surg. Med. 2014, 46, 573–581. [Google Scholar] [CrossRef]
- Otani, T.; Raigrodski, A.J.; Mancl, L.; Kanuma, I.; Rosen, J. In vitro evaluation of accuracy and precision of automated robotic tooth preparation system for porcelain laminate veneers. J. Prosthet. Dent. 2015, 114, 229–235. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Zhao, Z.; Song, R.; Lu, J.; Lu, P.; Wang, Y. Tooth arrangement for the manufacture of a complete denture using a robot. Ind. Robot Int. J. 2001, 28, 420–425. [Google Scholar] [CrossRef]
- Zhang, Y.; Ma, J.; Zhao, Y.; Peijun, L.; Wang, Y. Kinematic analysis of tooth-arrangement robot with serial-parallel joints. In Proceedings of the 2008 International Conference on Information and Automation, Changsha, China, 20–23 June 2008; pp. 624–628. [Google Scholar]
- Zhang, Y.-D.; Jiang, J.-G.; Liang, T.; Hu, W.-P. Kinematics modeling and experimentation of the multi-manipulator tooth-arrangement robot for full denture manufacturing. J. Med. Syst. 2011, 35, 1421–1429. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Jiang, J.G.; Lv, P.J.; Wang, Y. Coordinated control and experimentation of the dental arch generator of the tooth- arrangement robot. Int. J. Med. Robot. Comput. Assist. Surg. 2010, 6, 473–482. [Google Scholar] [CrossRef]
- Zhang, Y.-D.; Jiang, J.G.; Liang, T. Structural design of a cartesian coordinate tooth-arrangement robot. In Proceedings of the 2011 International Conference on Electronic & Mechanical Engineering and Information Technology, Harbin, China, 12–14 August 2011; Volume 2, pp. 1099–1102. [Google Scholar]
- Zhang, Y.-D.; Gu, J.-T.; Jiang, J.-G.; Sun, X.-L. Motion control point optimization of dental arch generator. Int. J. U-E-Serv. Sci. Technol. 2013, 6, 49–56. [Google Scholar] [CrossRef]
- Rawal, S.; Tillery, D.E., Jr.; Brewer, P. Robotic-Assisted Prosthetically Driven Planning and Immediate Placement of a Dental Implant. Compend. Contin. Educ. Dent. 2020, 41, 26–30. [Google Scholar] [PubMed]
- Cheng, K.J.; Kan, T.S.; Liu, Y.F.; Zhu, W.D.; Zhu, F.D.; Wang, W.B.; Jiang, X.F.; Dong, X.T. Accuracy of dental implant surgery with robotic position feedback and registration algorithm: An in-vitro study. Comput. Biol. Med. 2021, 129, 104153. [Google Scholar] [CrossRef] [PubMed]
- Kim, G.; Seo, H.; Im, S.; Kang, D.; Jeong, S. A study on simulator of human-robot cooperative manipulator for dental implant surgery. In Proceedings of the 2009 IEEE international symposium on industrial electronics, Seoul, Republic of Korea, 5–8 July 2009; pp. 2159–2164. [Google Scholar]
- Chen, X.; Wang, C.; Lin, Y. A computer-aided oral implantology system. In Proceedings of the 2005 IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 17–18 January 2006; pp. 3312–3315. [Google Scholar]
- Lorsakul, A.; Suthakorn, J.; Sinthanayothin, C.; Tharanon, W. Toward robot-assisted dental surgery: Path generation and navigation system using optical tracking approach. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 1212–1217. [Google Scholar]
- Sun, X.; McKenzie, F.D.; Bawab, S.; Li, J.; Yoon, Y.; Huang, J.K. Automated dental implantation using image-guided robotics: Registration results. Int. J. Comput. Assist. Radiol. Surg. 2011, 6, 627–634. [Google Scholar] [CrossRef] [PubMed]
- Yu, K.; Uozumi, S.; Ohnishi, K.; Usuda, S.; Kawana, H.; Nakagawa, T. Stereo vision based robot navigation system using modulated potential field for implant surgery. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 493–498. [Google Scholar]
- Yu, K.; Matsunaga, T.; Kawana, H.; Usuda, S.; Ohnishi, K. Frequency-based analysis of the relationship between cutting force and CT number for an implant-surgery-teaching robot. IEEJ J. Ind. Appl. 2017, 6, 66–72. [Google Scholar] [CrossRef] [Green Version]
- Sun, M.; Chai, Y.; Chai, G.; Zheng, X. Fully automatic robot-assisted surgery for mandibular angle split osteotomy. J. Craniofacial Surg. 2020, 31, 336–339. [Google Scholar] [CrossRef]
- Woo, S.Y.; Lee, S.J.; Yoo, J.Y.; Han, J.J.; Hwang, S.J.; Huh, K.H.; Lee, S.S.; Heo, M.S.; Choi, S.C.; Yi, W.J. Autonomous bone repositionaroundanatomicallandmarkforrobot-assistedorthognathicsurgery. J. Maxillofac. 2017, 45, 1980–1988. [Google Scholar]
- Ma, Q.; Kobayashi, E.; Wang, J.; Hara, K.; Suenaga, H.; Sakuma, I.; Masamune, K. Development and preliminary evaluation of an autonomous surgical system for oral and maxillofacial surgery. Int. J. Med. Robot. Comput. Assist. Surg. 2019, 15, e1997. [Google Scholar] [CrossRef]
- Zhang, Y.D.; Jiang, J.X. Analysis and experimentation of the robotic system for archwire bending. Applied Mechanics and Materials. Trans. Tech. Publ. 2012, 121, 3805–3809. [Google Scholar]
- Deng, H.; Xia, Z.; Weng, S.; Gan, Y.; Xiong, J.; Ou, Y.; Zhang, J. Motion planning and control of a robotic system for orthodontic archwire bending. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 3729–3734. [Google Scholar]
- Xia, Z.; Deng, H.; Weng, S.; Gan, Y.; Xiong, J.; Wang, H. Development of a robotic system for orthodontic archwire bending. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 730–735. [Google Scholar]
- Gilbert, A. An in-office wire-bending robot for lingual orthodontics. J. Clin. Orthod. 2011, 45, 230. [Google Scholar]
- Alford, T.J.; Roberts, W.E.; Hartsfield, J.K., Jr.; Eckert, G.J.; Snyder, R.J. Clinical outcomes for patients finished with the SureSmileTM method compared with conventional fixed orthodontic therapy. Angle Orthod. 2011, 81, 383–388. [Google Scholar] [CrossRef] [Green Version]
- Dong, J. Rule-Based Planning for Automated Endodontic Treatment: From Dental Radiography, Three-Dimensional Computer Modeling to Tool Selection and Path Control. Ph.D. Thesis, Columbia University, New York, NY, USA, 2003. [Google Scholar]
- Wang, G.; Cong, M.; Xu, W.; Wen, H.; Du, J. A biomimetic chewing robot of redundantly actuated parallel mechanism. Ind. Robot Int. J. 2015, 42, 103–109. [Google Scholar] [CrossRef]
- Tahir, A.M.; Jilich, M.; Trinh, D.C.; Cannata, G.; Barberis, F.; Zoppi, M. Architecture and design of a robotic mastication simulator for interactive load testing of dental implants and the mandible. J. Prosthet. Dent. 2019, 122, 389.e1–389.e8. [Google Scholar] [CrossRef]
- Conserva, E.; Menini, M.; Tealdo, T.; Bevilacqua, M.; Pera, F.; Ravera, G.; Pera, P. Robotic chewing simulator for dental materials testing on a sensor-equipped implant setup. Int. J. Prosthodont. 2008, 21, 501–508. [Google Scholar] [PubMed]
- Conserva, E.; Menini, M.; Tealdo, T.; Bevilacqua, M.; Ravera, G.; Pera, F.; Pera, P. The use of a masticatory robot to analyze the shock absorption capacity of different restorative materials for prosthetic implants: A preliminary report. Int. J. Prosthodont. 2009, 22, 53–55. [Google Scholar]
- Raabe, D.; Alemzadeh, K.; Harrison, A.; Ireland, A. The chewing robot: A new biologically-inspired way to evaluate dental restorative materials. In Proceedings of the 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 6050–6053. [Google Scholar]
- Raabe, D.; Harrison, A.; Ireland, A.; Alemzadeh, K.; Sandy, J.; Dogramadzi, S.; Melhuish, C.; Burgess, S. Improved single-and multi-contact life-time testing of dental restorative materials using key characteristics of the human masticatory system and a force/position-controlled robotic dental wear simulator. Bioinspir. Biomim. 2011, 7, 016002. [Google Scholar] [CrossRef]
- Wen, H.; Cong, M.; Wang, G. Experimental verification of workspace and mouth-opening movement of a redundantly actuated humanoid chewing robot. Ind. Robot Int. J. 2015, 42, 406–415. [Google Scholar] [CrossRef]
- Carossa, M.; Cavagnetto, D.; Ceruti, P.; Mussano, F.; Carossa, S. Individual mandibular movement registration and reproduction using an optoeletronic jaw movement analyzer and a dedicated robot: A dental technique. BMC Oral Health 2020, 20, 271. [Google Scholar] [CrossRef]
- Lang, T.; Staufer, S.; Jennes, B.; Gaengler, P. Clinical validation of robot simulation of toothbrushing-comparative plaque removal efficacy. BMC Oral Health 2014, 14, 82. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Year | Country | Robot System | Dentistry Field | Outcome | Adventages | Reference |
|---|---|---|---|---|---|---|---|
| Nishigawa K, et al. | 2007 | Japan | A novel robotic articulator that reproduced a six-degree-of-freedom jaw movement | Prosthodontics-articulator | This articulator could perform a precise reproduction of the dynamic jaw motion during the functional jaw movement. | This system has potential to improve accuracy of the prosthetic teeth occlusion. | [3] |
| Zheng G, et al. | 2007 | China | A computer assisted system in dental implantology | Oral implantology | The preliminary experiment shows that the system is accepted in terms of both efficiency and the accuracy. | It is going to be test in clinical studies to improve accuracy and incorporatemore features that the dentists demandand. | [4] |
| Ariji Y, et al. | 2009 | Japan | A specially fabricated robot for masseter and temporal muscle massage | Other-Rehabilitation | The massage treatment was very effective for most patients. | The robot may constitute a useful tool for treating TMJ dysfunction associated with myofascial pain. | [5] |
| Kasahara Y, et al. | 2012 | Japan | A telerobotic-assisted drilling system | Oral implantology | Cutting force transmits from a cutting material to a surgeon via the master–slave system. | It achieved precise manipulation of the drill feed and vivid feedback from the cutting force. | [6] |
| Jiang J G, et al. | 2013 | China | A dental arch generator with a hardware control scheme based on the industrial personal computer and control card PC6401 | Prosthodontics-tooth arrangement | The dental arch generator can automatically generate a dental arch to fit a patient according to the patient’s arch parameters. | The system can be used to fabricate full dentures and bend orthodontic wires. | [7] |
| Jin-gang J, et al. | 2013 | China | An archwire bending robot | Orthodontics | The overall structure, bend die and archwire supporting part of archwire bending robot for orthodontic treatment is designed. | This paper proposes to use robots to replace dentists for completing orthodontic wires bending. | [8] |
| Wang D, et al. | 2014 | China | LaserBot | Prosthodontics-tooth preparation | It can manipulate a femtosecond laser beam to drill/burr a decayed tooth to realize clinical tooth crown preparation | It achieved precise 3D motion control of a laser focal point and is small enough to be used in the narrow workspace of the oral cavity. | [9] |
| Sun X, et al. | 2014 | USA | A robotic system for automated site preparation for dental implants | Oral implantology | Phantom experiments proved that the complicated volumes of the natural-root-formed implants can be accomplished. | With this robotic system, controlled and accurate drilling was achieved, which made more advanced implant designs possible. | [10] |
| Toosi A, et al. | 2014 | Iran | A haptic virtual reality simulator for root canal treatment | Endodontics | The user can burr the enamel and dentin until reaching the pulp chamber and then clean the internal surface of a root canal using a simulated K-file. | It helps improving the training available in the field of endodontics. | [11] |
| Razavi M, et al. | 2015 | Iran | A haptics- based tooth drilling simulator | Endodontics | The proposed idea for force calculation leads to a uniform sensation of force | An important feature of the designed system is the capability to run in a real-time fashion. | [12] |
| Wang G, et al. | 2015 | China | A novel biomimetic chewing robot | Other-Masticatory | The chewing robot is able to simulate the motion of human mastication in a biologically faithful way. | Two higher kinematic pairs of point contact are proposed to simulate the two temporomandibular joints. | [13] |
| Yuan F, et al. | 2016 | China | An automatic tooth preparation robotic device with three-dimensional motion planning software | Prosthodontics-tooth preparation | The results validated the accuracy and feasibility of the automatic tooth preparation technique | The results illustrated the potential of the automatic tooth preparation technique for use in dental clinics. | [14] |
| Chao A H, et al. | 2016 | USA | KUKA, Augsburgs, Germany | Oral surgery | This preclinical study demonstrates the feasibility of pre-programmed robotic osteotomies for free fibula flap mandible reconstruction. | This method exhibits high degrees of linear and angular accuracy, and may be of utility in the development of techniques to further improve surgical accuracy. | [15] |
| Zhu J H, et al. | 2016 | China | An automatical custom three-arm robotic system | Oral surgery | The accuracy of the fibula implant orientation with the robotic system was comparable to that with navigation system and superior to that with the freehand technique. | The robotic system is feasible, efficient, and reliable for mandibular reconstruction. | [16] |
| Sakaeda G, et al. | 2017 | Japan | An automatic teeth cleaning mouthpiece robot | Other-tooth cleaning | The robot system was operated correctly during a demonstration test. | This robot was developed to support elderly and handicapped people who cannot brush their teeth without assistance from helpers. | [17] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Watanabe, M.; Ichikawa, T. Robotics in Dentistry: A Narrative Review. Dent. J. 2023, 11, 62. https://doi.org/10.3390/dj11030062
Liu L, Watanabe M, Ichikawa T. Robotics in Dentistry: A Narrative Review. Dentistry Journal. 2023; 11(3):62. https://doi.org/10.3390/dj11030062
Chicago/Turabian StyleLiu, Lipei, Megumi Watanabe, and Tetsuo Ichikawa. 2023. "Robotics in Dentistry: A Narrative Review" Dentistry Journal 11, no. 3: 62. https://doi.org/10.3390/dj11030062