Drift Artifacts Correction for Laboratory Cone-Beam Nanoscale X-ray Computed Tomography by Fitting the Partial Trajectory of Projection Centroid
 ,
,  ,
,
Abstract
:1. Introduction
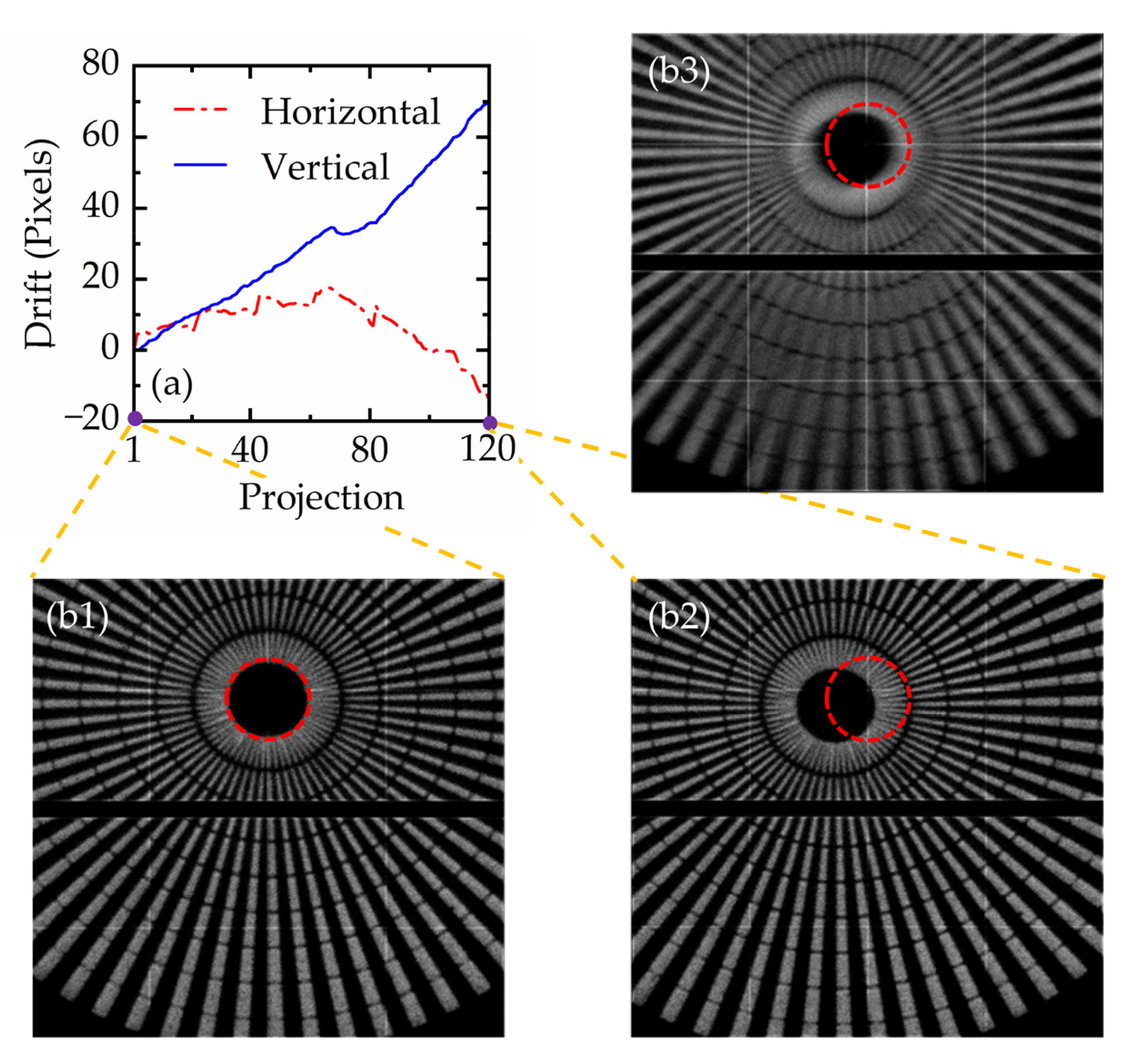
2. Necessity for Projection Drift Correction in Nano-CT
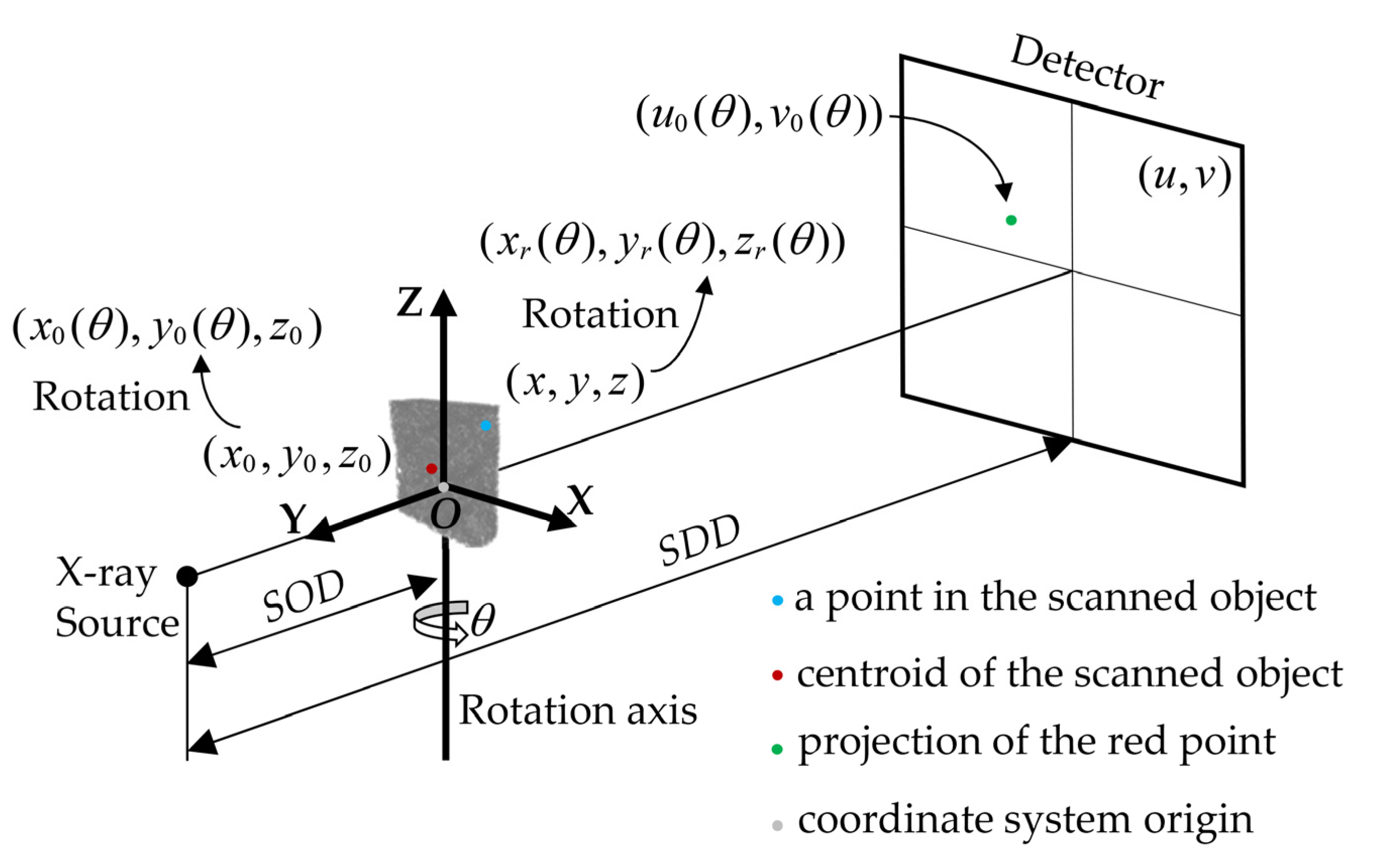
3. Theory
3.1. Measurement of PTOC
3.2. Measurement of TPC
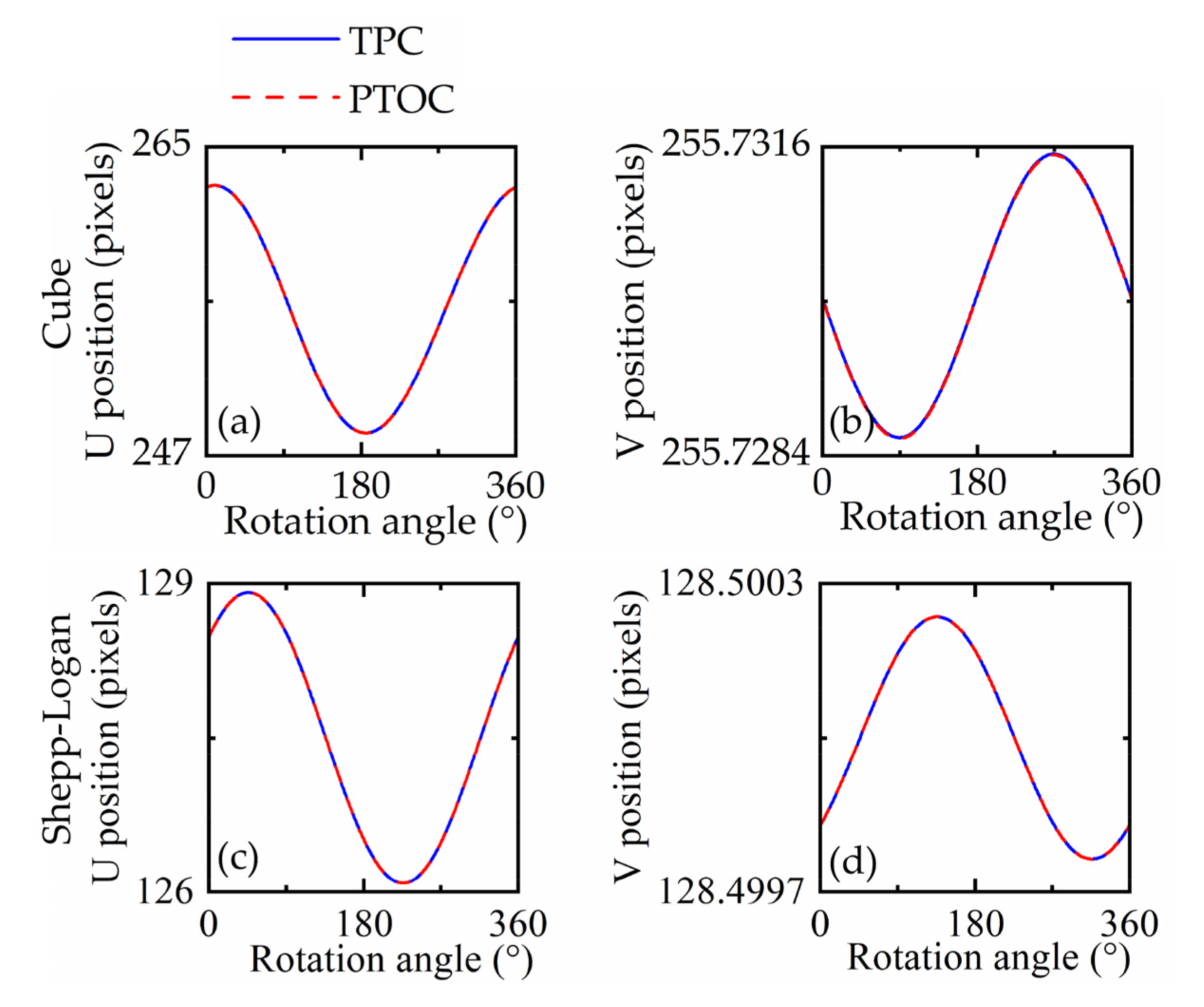
3.3. Consistency between TPC and PTOC
4. Method
4.1. Fitting the Complete TPC
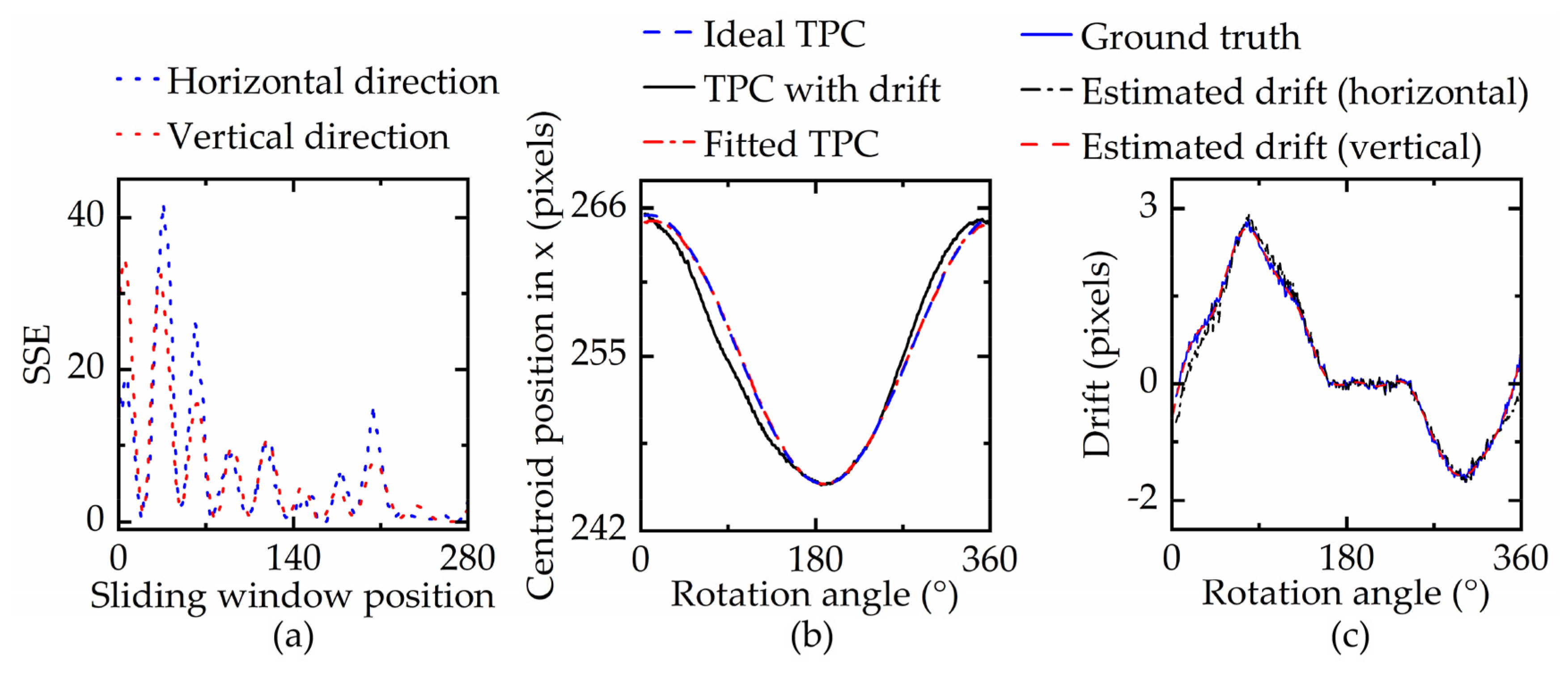
4.2. Interval Search Method for Estimating the Drift
5. Experiments
5.1. Simulation Study
5.2. Tomato Seed and Bamboo Stick Imaging
5.3. Comparative Approaches
6. Results and Discussion
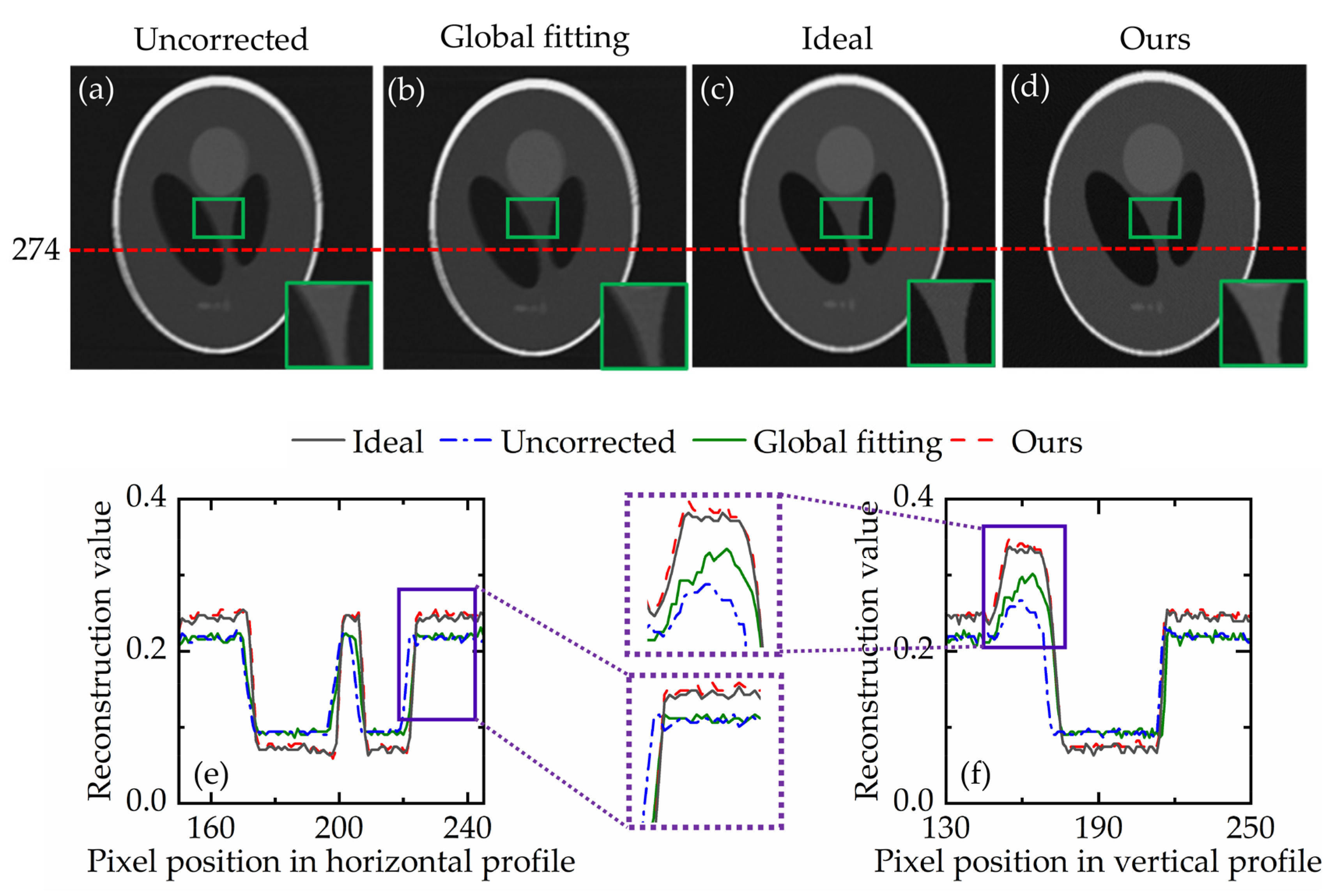
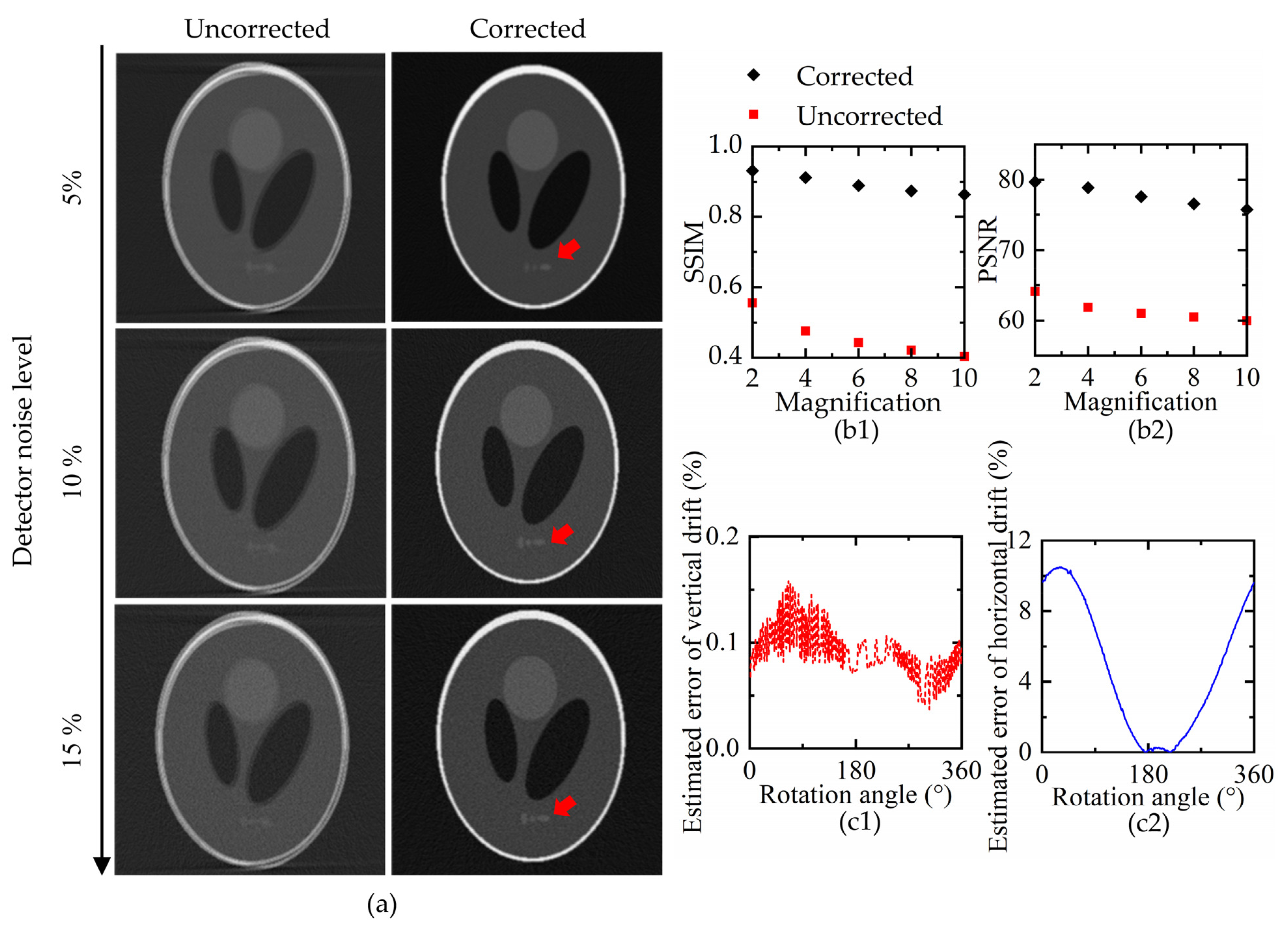
6.1. Simulation Result
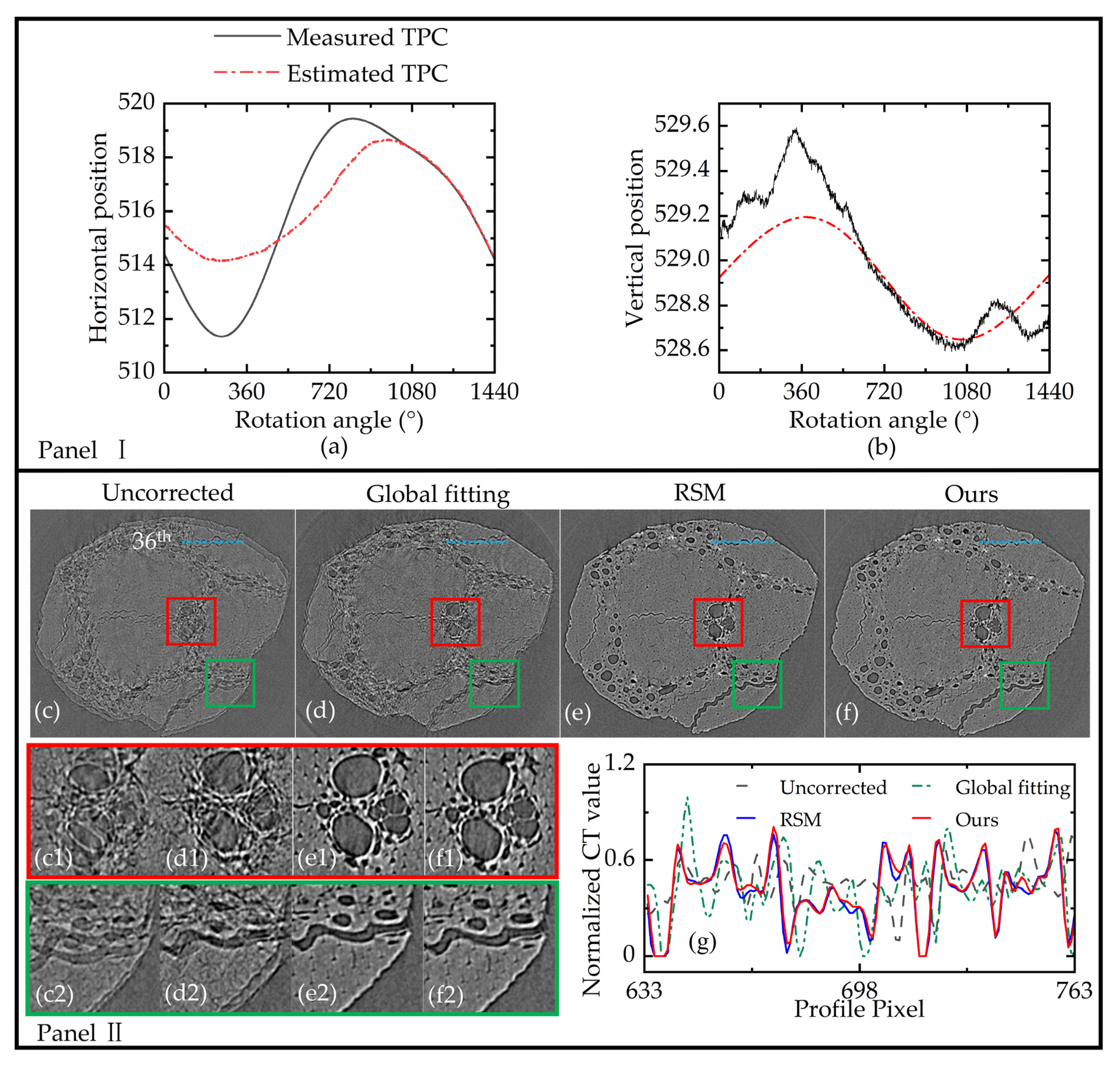
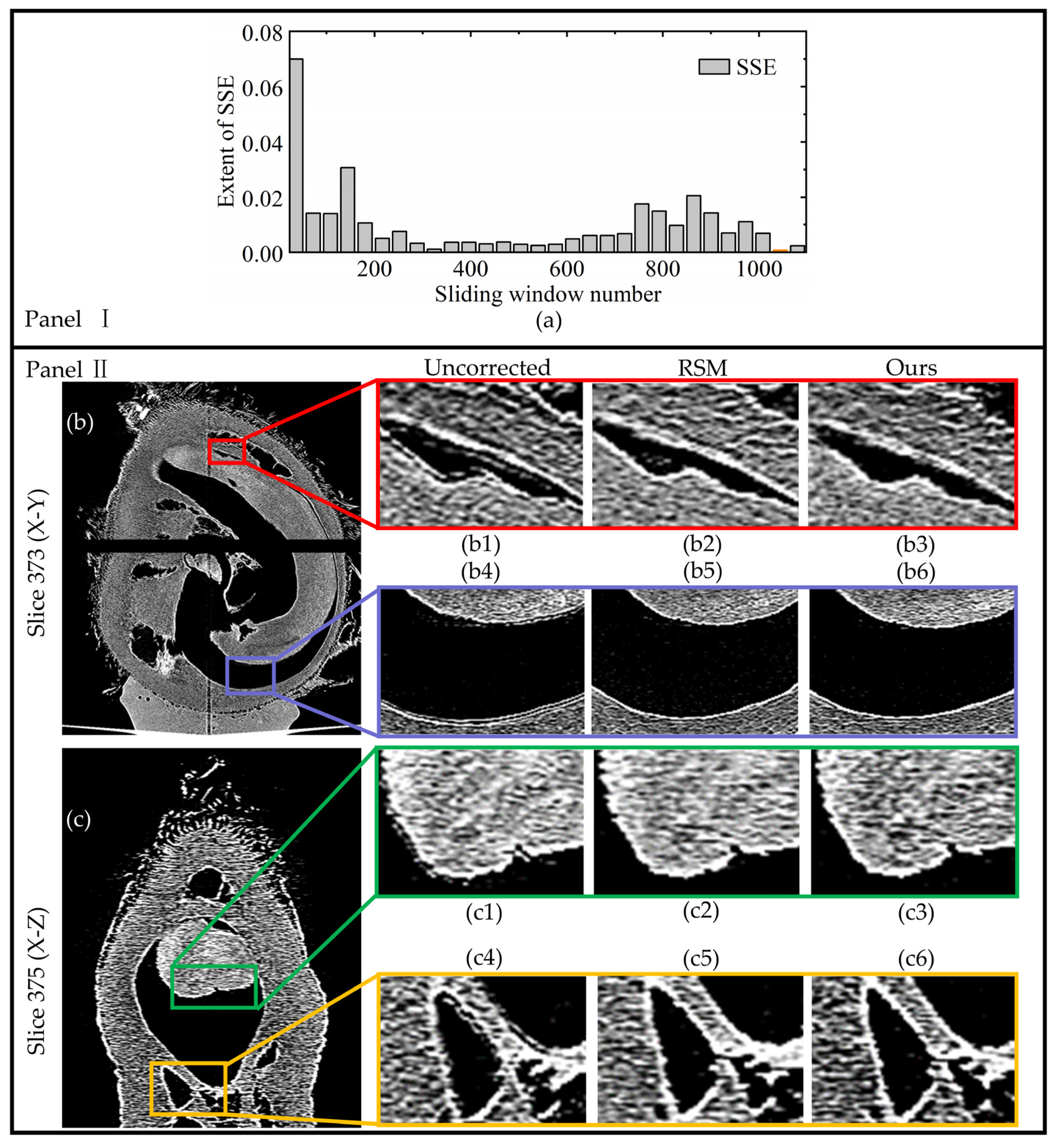
6.2. Practical Experiment
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guo, E.; Zeng, G.; Kazantsev, D.; Rockett, P.; Bent, J.; Kirkland, M.; Van Dalen, G.; Eastwood, D.S.; StJohn, D.; Lee, P.D. Synchrotron X-ray tomographic quantification of microstructural evolution in ice cream—A multi-phase soft solid. RSC Adv. 2017, 7, 15561–15573. [Google Scholar] [CrossRef] [Green Version]
- Vogeler, F.; Verheecke, W.; Voet, A.; Kruth, J.P.; Dewulf, W. Positional stability of 2D X-ray images for computer tomography. In Proceedings of the International Symposium of Digital Industrial Radiology and Computed Temography, Berlin, Germany, 20–22 June 2011. [Google Scholar]
- Hiller, J.; Maisl, M.; Reindl, L. Physical characterization and performance evaluation of an x-ray micro-computed tomography system for dimensional metrology applications. Meas. Sci. Technol. 2012, 23, 085404. [Google Scholar] [CrossRef]
- Reisinger, S.; Schmitt, M.; Voland, V. Geometric adjustment methods to improve reconstruction quality on rotational cone-beam systems. In Proceedings of the 4th Conference on Industrial Computed Tomography (iCT), Wels, Austria, 19–21 September 2012. [Google Scholar]
- Flay, N.; Sun, W.; Brown, S.; Leach, R.; Blumensath, T. In Investigation of the Focal Spot Drift in Industrial Cone-beam X-ray Computed Tomography. In Proceedings of the Digital Industrial Radiology and Computed Tomography (DIR 2015), Ghent, Belgium, 22–25 June 2015. [Google Scholar]
- Cho, Y.; Siewerdsen, D.M.J.; Jaffray, D. Accurate technique for complete geometric calibration of cone-beam computed tomography systems. Med. Phys. 2005, 32, 968–983. [Google Scholar] [CrossRef] [PubMed]
- Sawall, S.; Knaup, M.; Kachelriess, M. A robust geometry estimation method for spiral, sequential and circular cone-beam micro-CT. Med. Phys. 2012, 39, 5384–5392. [Google Scholar] [CrossRef] [PubMed]
- Wang, S.-H.; Zhang, K.; Wang, Z.-L.; Gao, K.; Wu, Z.; Zhu, P.-P.; Wu, Z.-Y. A user-friendly nano-CT image alignment and 3D reconstruction platform based on LabVIEW. Chin. Phys. C 2015, 39, 018001. [Google Scholar] [CrossRef]
- Mlodzianoski, M.J.; Schreiner, J.M.; Callahan, S.P.; Smolková, K.; Dlasková, A.; Šantorová, J.; Ježek, P.; Bewersdorf, J. Sample drift correction in 3D fluorescence photoactivation localization microscopy. Opt. Express 2011, 19, 15009. [Google Scholar] [CrossRef]
- Tripathi, A.; McNulty, I.; Shpyrko, O.G. Ptychographic overlap constraint errors and the limits of their numerical recovery using conjugate gradient descent methods. Opt. Express 2014, 22, 1452–1466. [Google Scholar] [CrossRef]
- Gullberg, G.T.; Tsui, B.M.W.; Crawford, C.R.; Ballard, J.G.; Hagius, J.T. Estimation of geometrical parameters and collimator evaluation for cone beam tomography. Med. Phys. 1990, 17, 264–272. [Google Scholar] [CrossRef]
- Bronnikov, A.V. Virtual alignment of x-ray cone-beam tomography system using two calibration aperture measurements. Opt. Eng. 1999, 38, 381–386. [Google Scholar] [CrossRef]
- Vavřík, D.; Jandejsek, I.; Pichotka, M. Correction of the X-ray tube spot movement as a tool for improvement of the micro-tomography quality. J. Instrum. 2016, 11, C01029. [Google Scholar] [CrossRef]
- Jian, F.; Chen, L.; Zhenzhong, L.; Roeder, R.K. Analysis and correction of dynamic geometric misalignment for nano-scale computed tomography at BSRF. PLoS ONE 2015, 10, e0141682. [Google Scholar]
- de Oliveira, F.B.; de Campos Porath, M.; Nardelli, V.C.; Arenhart, F.A.; Donatelli, G.D. Characterization and correction of geometric errors induced by thermal drift in CT measurements. Key Eng. Mater. 2014, 613, 327–334. [Google Scholar] [CrossRef]
- Stock, S.R.; Sasov, A.; Liu, X.; Salmon, P.L. Compensation of mechanical inaccuracies in micro-CT and nano-CT. In Developments in X-ray Tomography VI; SPIE: Washington, DC, USA, 2008. [Google Scholar]
- Ackermann, F. Digital image correlation: Performance and potential application in photogrammetry. Photogramm. Rec. 1984, 11, 429–439. [Google Scholar] [CrossRef]
- Huang, X.; Wild, S.M.; Di, Z.W. In calibrating sensing drift in tomographic inversion. In Proceedings of the 2019 IEEE International Conference on Image Processing (ICIP), Taipei, Taiwan, 22–25 September 2019. [Google Scholar]
- Gürsoy, D.; Hong, Y.P.; He, K.; Hujsak, K.; Yoo, S.; Chen, S.; Li, Y.; Ge, M.; Miller, L.M.; Chu, Y.S.; et al. Rapid alignment of nanotomography data using joint iterative reconstruction and reprojection. Sci. Rep. 2017, 7, 11818. [Google Scholar] [CrossRef] [Green Version]
- Austin, A.P.; Wendy, Z.; Leyffer, S.; Wild, S.M. Simultaneous sensing error recovery and tomographic inversion using an optimization-based approach. SIAM J. Sci. Comput. 2019, 41, B497–B521. [Google Scholar] [CrossRef]
- Dong, D.; Zhu, S.; Qin, C.; Kumar, V.; Stein, J.V.; Oehler, S.; Savakis, C.; Tian, J.; Ripoll, J. Automated recovery of the center of rotation in optical projection tomography in the presence of scattering. IEEE J. Biomed. Health Inform. 2013, 17, 198–204. [Google Scholar] [CrossRef]
- Ancora, D.; Battista, D.D.; Giasafaki, G.; Psycharakis, S.E.; Liapis, E.; Ripoll, J.; Zacharakis, G. Optical projection tomography via phase retrieval algorithms. Methods 2018, 136, 81–89. [Google Scholar] [CrossRef]
- Rieckher, M.; Psycharakis, S.E.; Ancora, D.; Liapis, E.; Zacharopoulos, A.; Ripoll, J.; Tavernarakis, N.; Zacharakis, G. Demonstrating improved multiple transport-mean-free-path imaging capabilities of light sheet microscopy in the quantification of fluorescence dynamics. Biotechnol. J. 2018, 13, 1700419. [Google Scholar] [CrossRef]
- Bonse, U.; Rivers, M.L.; Wang, Y. Recent developments in microtomography at GeoSoilEnviroCARS. In Developments in X-ray Tomography V; SPIE: Washington, DC, USA, 2006. [Google Scholar]
- Wang, S.; Liu, J.; Li, Y.; Chen, J.; Zhu, L. Jitter correction for transmission X-ray microscopy via measurement of geometric moments. J. Synchrotron Radiat. 2019, 26, 1808–1814. [Google Scholar] [CrossRef]
- Li, X.; Chen, Z.; Jiang, X.; Xing, Y. Self-calibration for a multi-segment straight-line trajectory CT using invariant moment. In Developments in X-ray Tomography VIII; SPIE: Washington, DC, USA, 2012. [Google Scholar]
- Manuel Guizar-Sicairos, S.T.T.; Fienup, J.R. Efficient subpixel image registration algorithms. Opt. Lett. 2008, 33, 156. [Google Scholar] [CrossRef] [Green Version]
- Feldkamp, L.A.; Davis, L.C.; Kress, J.W. Practical cone-beam algorithm. J. Opt. Soc. Am. A 1984, 1, 612–619. [Google Scholar] [CrossRef] [Green Version]
- Gargiulo, L.; Leonarduzzi, C.; Mele, G. Micro-CT imaging of tomato seeds: Predictive potential of 3D morphometry on germination. Biosyst. Eng. 2020, 200, 112–122. [Google Scholar] [CrossRef]
- Zhou, W.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar]
- Chen, Y.; Yin, X.; Shi, L.; Shu, H.; Luo, L.; Coatrieux, J.L.; Toumoulin, C. Improving abdomen tumor low-dose CT images using a fast dictionary learning based processing. Phys. Med. Biol. 2013, 58, 5803–5820. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vollath, D. Automatic focusing by correlative methods. J. Microsc. 1987, 147, 279–288. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System Parameter | Value | |
|---|---|---|
| X-ray tube | Voltage | 60 kV |
| Current | 0.3 mA | |
| Detector | Pixel size | 75 μm |
| Detector size | 1030 × 1065 pixels | |
| Siemens star Scanning | Projection number | 120 |
| Exposure time | 30 s |
| Phantom | Object Size (mm) | Detector Size (mm) | SOD (mm) | SDD (mm) | Centroid Position (mm) | ||
|---|---|---|---|---|---|---|---|
| x | y | z | |||||
| Cube | 2.56 × 2.56 × 2.56 | 256 × 256 | 588.00 | 600.00 | 1.30 | 1.30 | 1.30 |
| Shepp–Logan | 64.00 × 64.00 × 64.00 | 512 × 512 | 300.00 | 600.00 | 33.90 | 32.33 | 32.18 |
| Direction | SSE | |
|---|---|---|
| Cube | Shepp–Logan | |
| Horizontal (U) | 2.0248 × 10−23 | 3.6488 × 10−8 |
| Vertical (V) | 3.4294 × 10−16 | 3.5077 × 10−8 |
| Reconstructed Slice | EOG | SSIM |
|---|---|---|
| Uncorrected | 0.641 | 0.708 |
| Global fitting | 0.794 | 0.852 |
| Ideal | 1.000 | 1.000 |
| Ours | 0.859 | 0.967 |
| Method | RSM | Ours | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sample | Bamboo Stick | Tomato Seed | Bamboo Stick | Tomato Seed | ||||||||
| Number | 1 | 2 | 1 | 2 | 3 | 4 | 1 | 2 | 1 | 2 | 3 | 4 |
| Vollath | 1.000 | 0.940 | 0.991 | 0.971 | 1.000 | 1.000 | 0.927 | 1.000 | 1.000 | 1.000 | 0.935 | 0.920 |
| Entropy | 1.000 | 0.993 | 1.000 | 1.000 | 1.000 | 0.979 | 0.992 | 1.000 | 0.995 | 0.990 | 0.998 | 1.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, M.; Han, Y.; Xi, X.; Zhu, L.; Liu, C.; Tan, S.; Chen, J.; Li, L.; Yan, B. Drift Artifacts Correction for Laboratory Cone-Beam Nanoscale X-ray Computed Tomography by Fitting the Partial Trajectory of Projection Centroid. Photonics 2022, 9, 405. https://doi.org/10.3390/photonics9060405
Liu M, Han Y, Xi X, Zhu L, Liu C, Tan S, Chen J, Li L, Yan B. Drift Artifacts Correction for Laboratory Cone-Beam Nanoscale X-ray Computed Tomography by Fitting the Partial Trajectory of Projection Centroid. Photonics. 2022; 9(6):405. https://doi.org/10.3390/photonics9060405
Chicago/Turabian StyleLiu, Mengnan, Yu Han, Xiaoqi Xi, Linlin Zhu, Chang Liu, Siyu Tan, Jian Chen, Lei Li, and Bin Yan. 2022. "Drift Artifacts Correction for Laboratory Cone-Beam Nanoscale X-ray Computed Tomography by Fitting the Partial Trajectory of Projection Centroid" Photonics 9, no. 6: 405. https://doi.org/10.3390/photonics9060405