Effect of Lidar Receiver Field of View on UAV Detection

Abstract
:1. Introduction
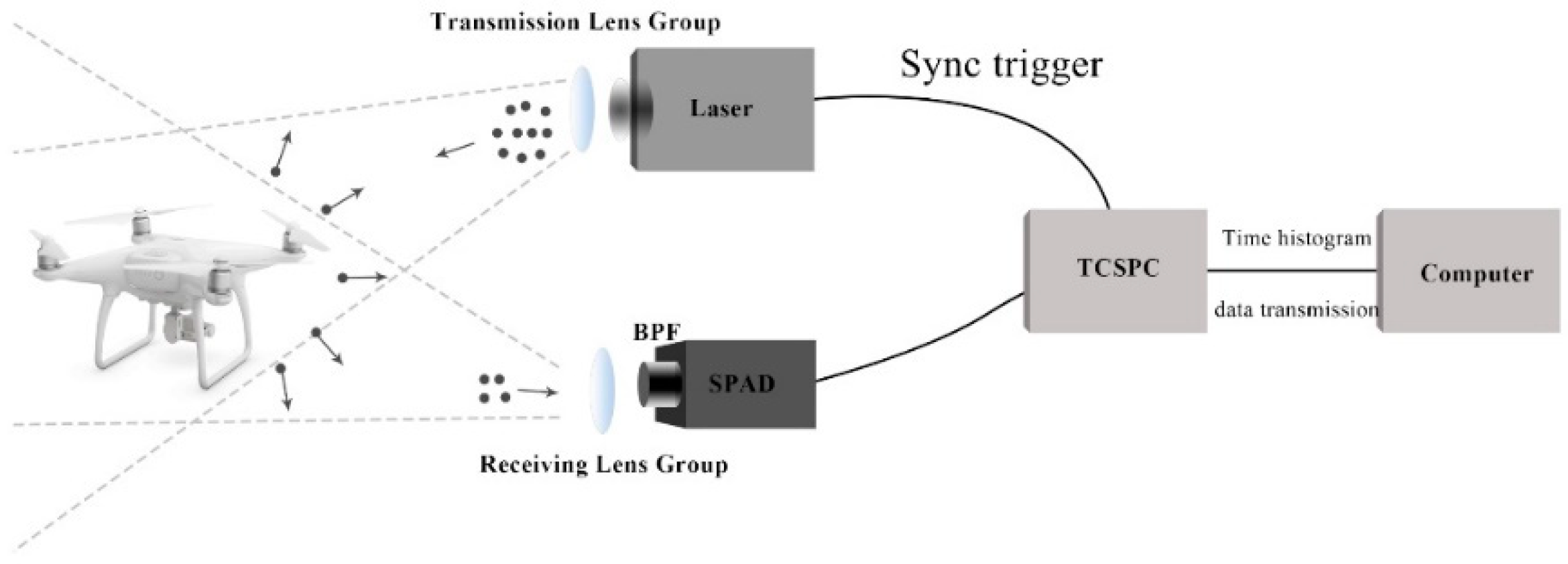
2. Single-Photon Lidar Process
3. Laser Searching Experiment at 1064 nm
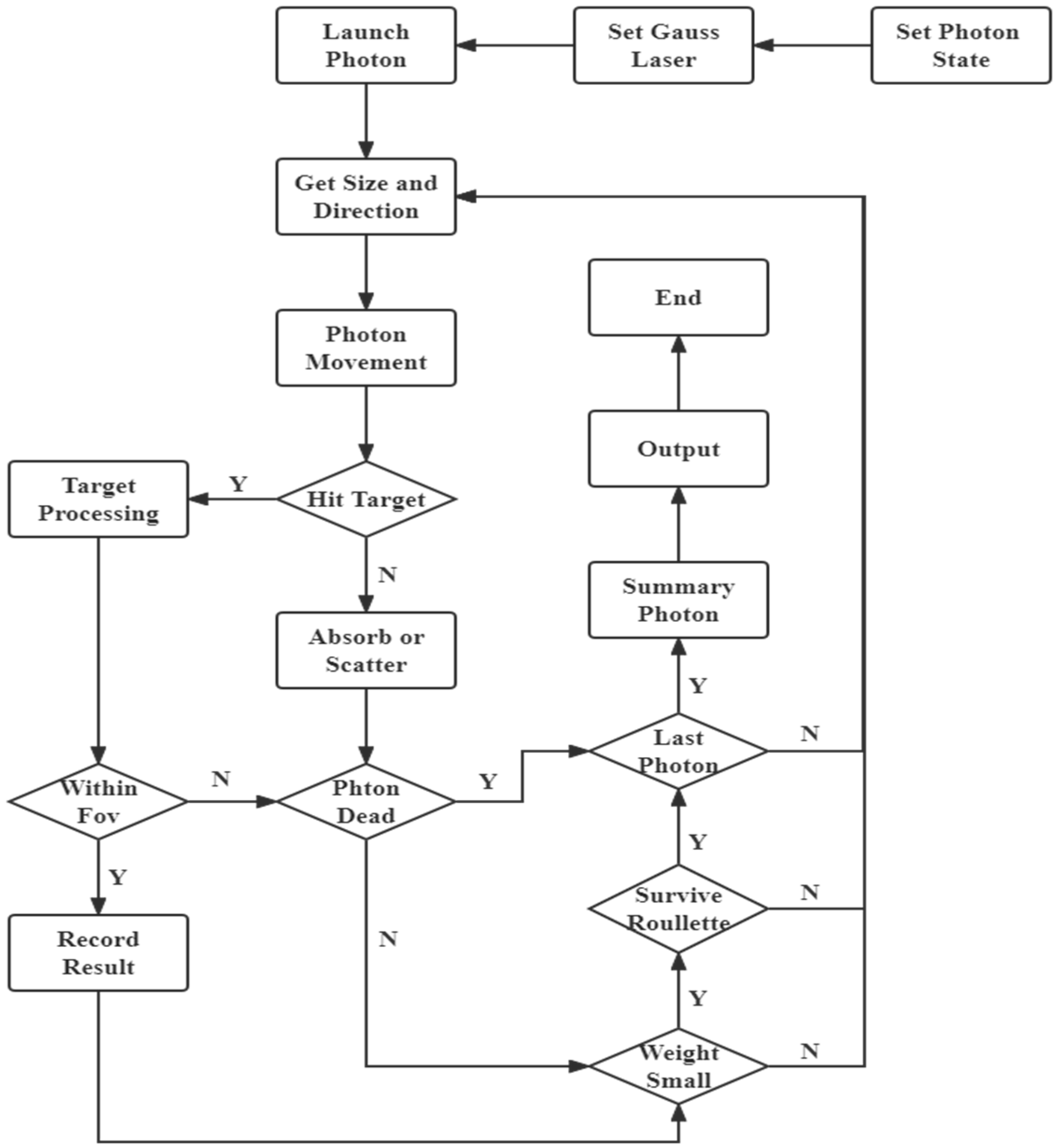
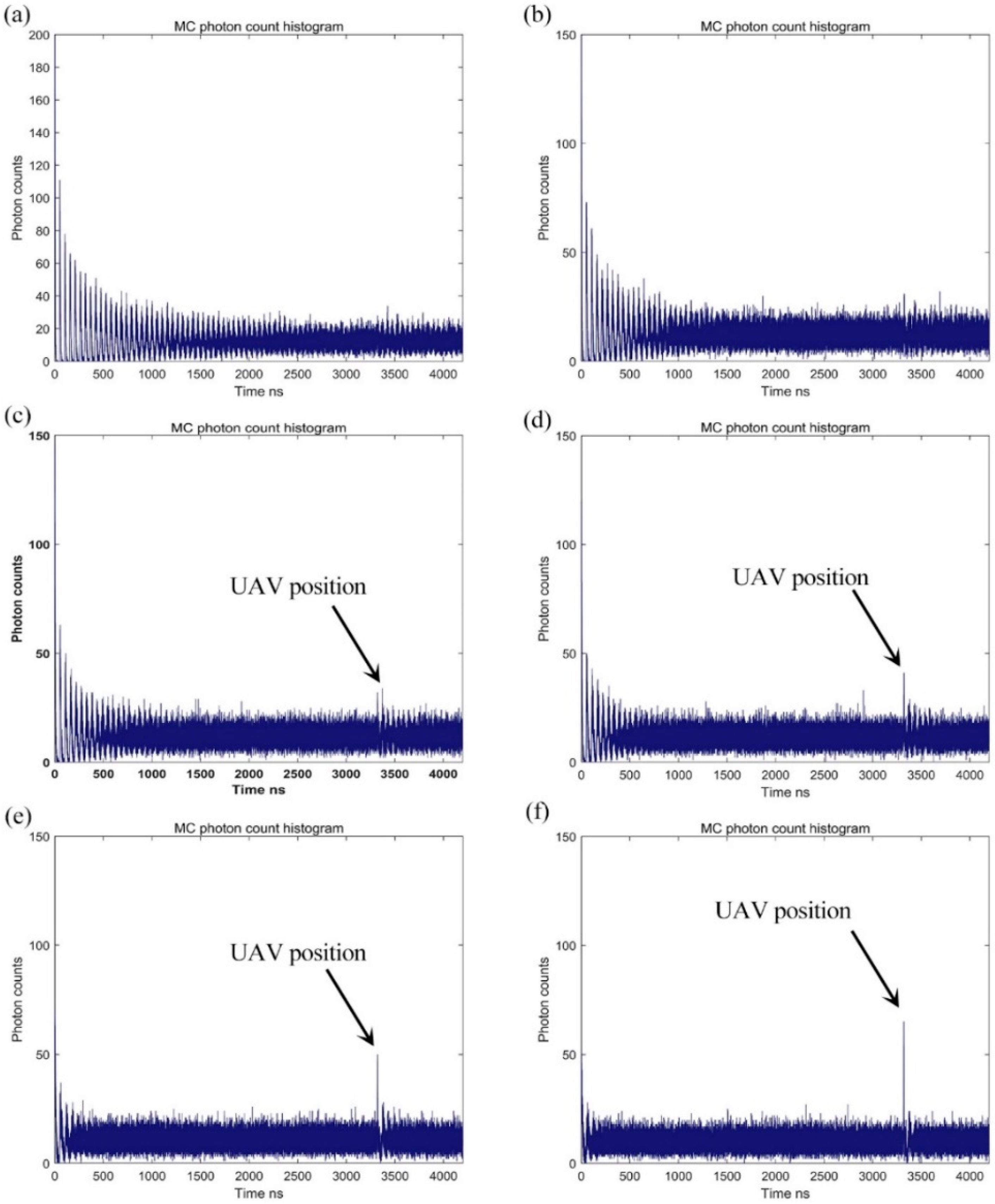
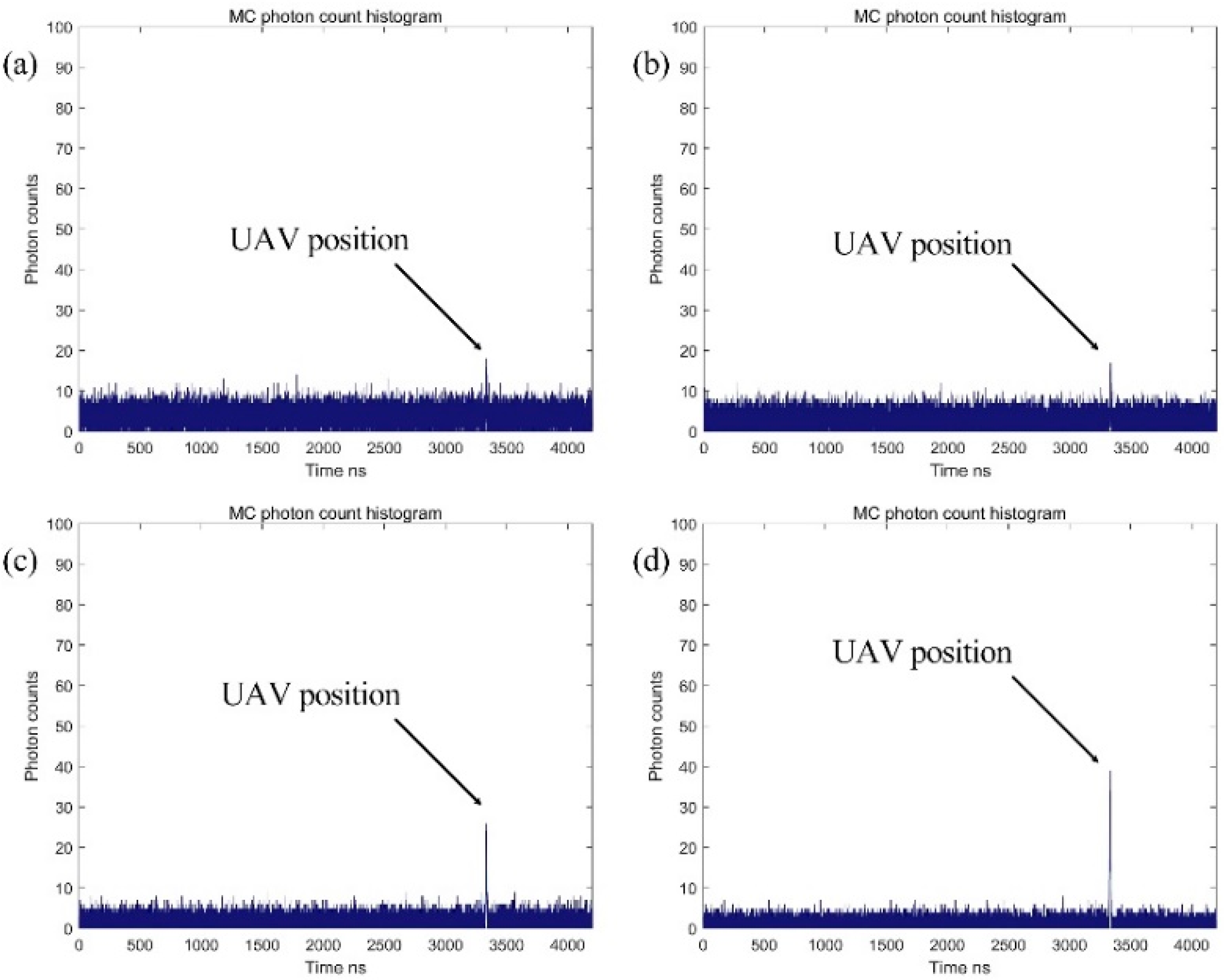
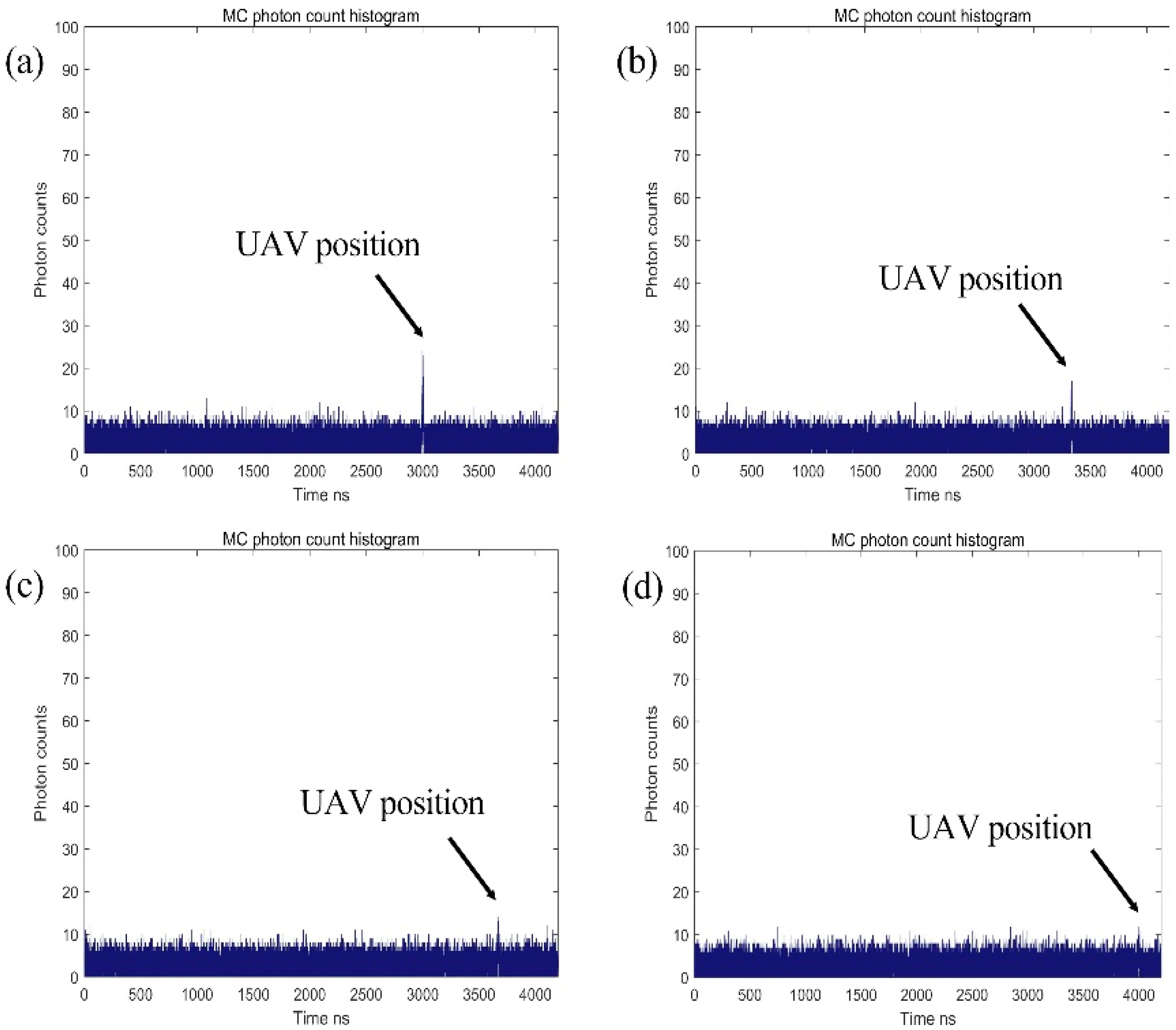
3.1. Simulation
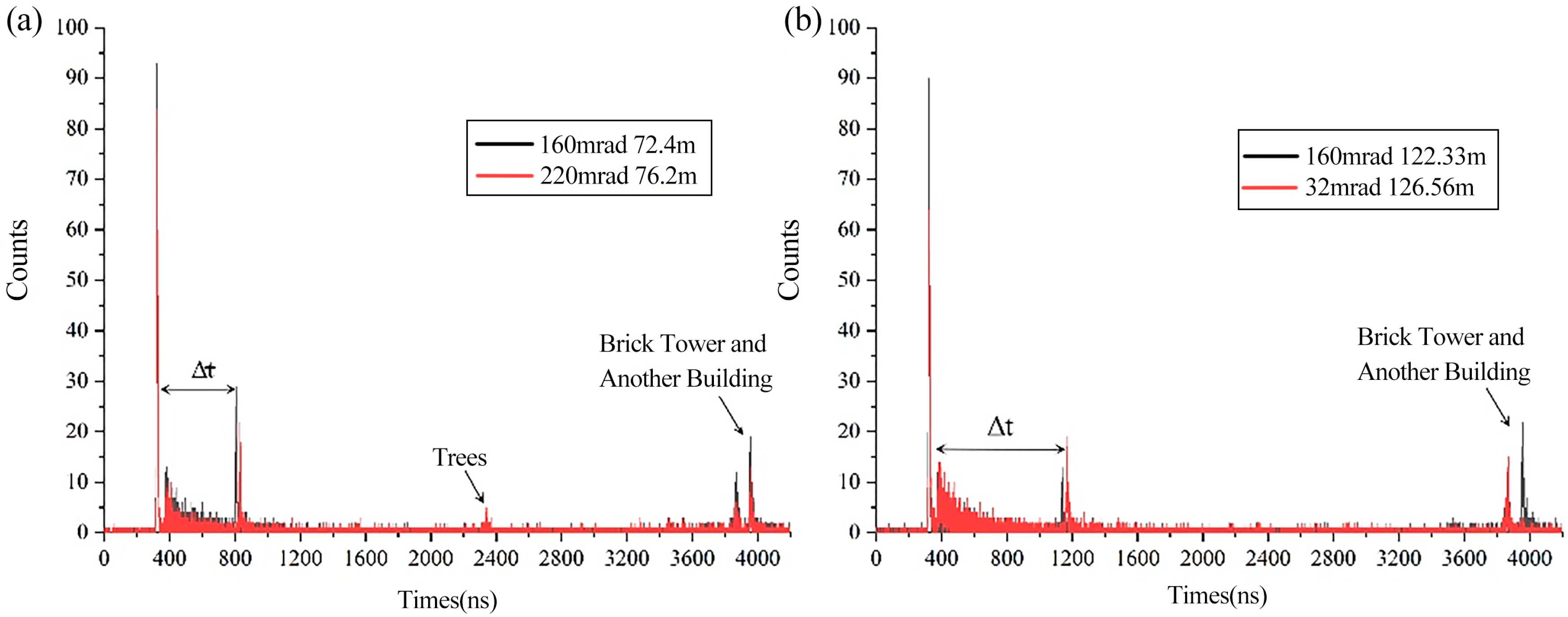
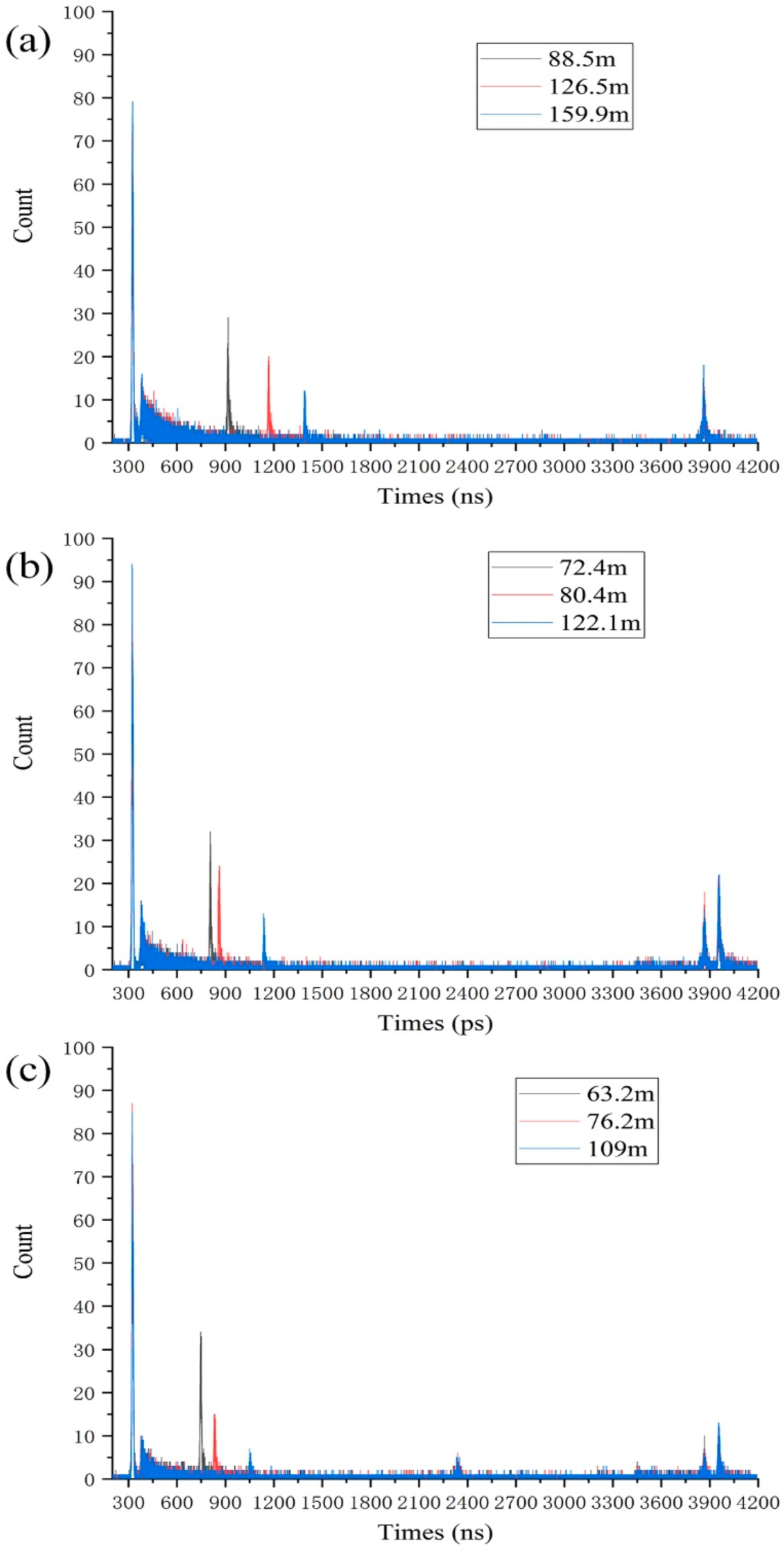
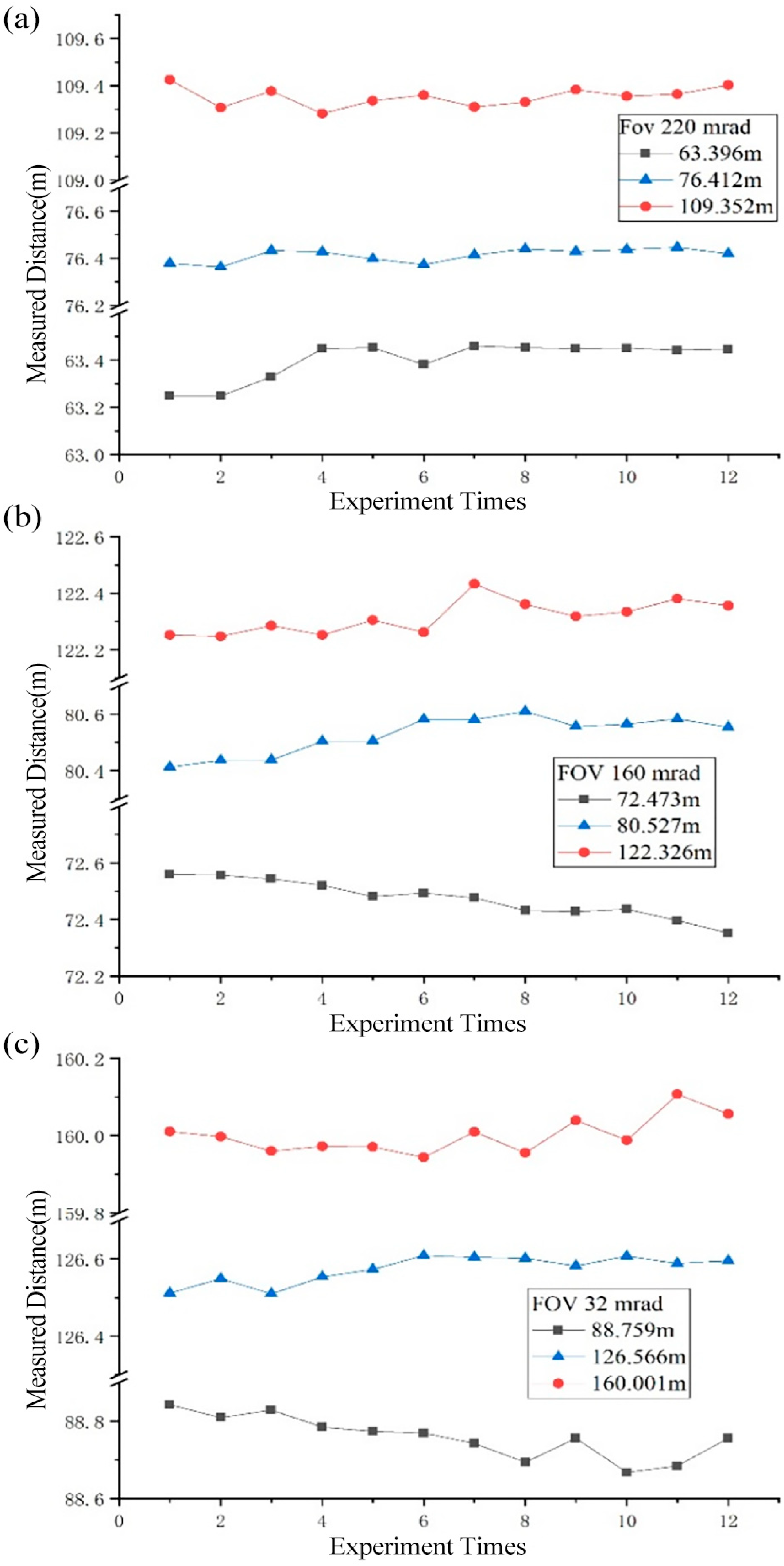
3.2. Experiment and Result
- Spectral response of filters: The absorptive BPF used in the experimental measurement does not entirely filter out the corresponding wavelength in the visible region, so the value of background attenuation outside this passband is different and ultimately results in a difference between the received photon and the simulation. It is also worth noting that we avoided the time of noon, so the background noise in the actual experiment was less than in the simulation.
- Dark count: Our experiments assumed that all photons generated by non-signaled processes are homogeneous “background” processes, but the decay of the incident flux only affects the background count of ambient light and has no effect on the dark count. Although the dark count rate of SPAD is usually low, it can still have an incredible impact on the echo’s signal-to-noise ratio.
- Target angle: Due to the influence of the weather environment, mainly the wind, the target aircraft cannot be stabilized at a specific position, so it may deviate from the optical axis, resulting in a decrease in the number of echo photons, and also a change in distance, which affects the ranging accuracy in repeated experiments.
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hammer, M.; Borgmann, B.; Hebel, M.; Arens, M. UAV detection, tracking, and classification by sensor fusion of a 360° lidar system and an alignable classification sensor. In Proceedings of the SPIE 11005, Laser Radar Technology and Applications XXIV, 110050E, Baltimore, MD, USA, 2 May 2019. [Google Scholar]
- Klaer, P.; Huang, A.; Sévigny, P.; Rajan, S.; Pant, S.; Patnaik, P.; Balaji, B. An Investigation of Rotary Drone HERM Line Spectrum under Manoeuvering Conditions. Sensors 2020, 20, 5940. [Google Scholar] [CrossRef] [PubMed]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitizing airborne laser scanner. Isprs J. Photogramm. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, K.; Bai, Z.; Sun, Y.; Yao, M. Design Study of a Large-Angle Optical Scanning System for MEMS LIDAR. Appl. Sci. 2022, 12, 1283. [Google Scholar] [CrossRef]
- Wei, Y.S.; Yang, S.L. Analysis and simulation of monopluse radar scanning modes. Syst. Eng. Electron. 2011, 33, 468–472. [Google Scholar]
- Chenhao, M.; Yuegang, F.; Ping, G. A composite scanning method and experiment of laser radar. Infrared Laser Eng. 2015, 44, 3270–3272. [Google Scholar]
- Guozhu, F.; Huajun, Y.; Qi, Q. Analyzing from simulation of optimizing the spiral scan in the laser radar system. Infrared Laser Eng. 2006, 35, 166–168. [Google Scholar]
- Lee, X.; Wang, C.; Luo, Z.; Li, S. Optical design of a new folding scanning system in MEMS-based lidar. Optics Laser Technol. 2020, 125, 106013. [Google Scholar] [CrossRef]
- Hadfield, R.H. Single-photon detectors for optical quantum information applications. Nat. Photonics 2009, 3, 696–705. [Google Scholar] [CrossRef]
- Buller, G.; Wallace, A. Ranging and Three-Dimensional Imaging Using Time-Correlated Single-Photon Counting and Point-by-Point Acquisition. IEEE J. Sel. Top. Quantum Electron. 2007, 13, 1006–1015. [Google Scholar] [CrossRef] [Green Version]
- Ye, L.; Zhang, G.; You, Z. Large-Aperture kHz Operating Frequency Ti-alloy Based Optical Micro Scanning Mirror for LiDAR Application. Micromachines 2017, 8, 120. [Google Scholar] [CrossRef]
- Li, Z.-P.; Ye, J.-T.; Huang, X.; Jiang, P.-Y.; Cao, Y.; Hong, Y.; Yu, C.; Zhang, J.; Zhang, Q.; Peng, C.-Z.; et al. Single-photon imaging over 200 km. Optica 2021, 8, 344. [Google Scholar] [CrossRef]
- Pearlman, M.R.; Noll, C.E.; Pavlis, E.C.; Lemoine, F.G.; Combrink, L.; Degnan, J.J.; Kirchner, G.; Schreiber, U. The ILRS: Approaching 20 years and planning for the future. J. Geod. 2019, 93, 2161–2180. [Google Scholar] [CrossRef]
- Church, P.; Grebe, C.; Matheson, J.; Owens, B. Aerlial and surface security applications using LiDAR. In Proceedings of the SPIE 10636, Laser Radar Teclnology and Applications XXIII, Orlando, FL, USA, 10 May 2018; p. 1063604. [Google Scholar]
- Justice, J.; Azzazy, M. Multi-mode LIDAR system for Detecting, Tracking and Engaging Small Unmannedair Vehicles. U.S. Patent 0128922 A1, 10 May 2018. [Google Scholar]
- Li, Z.-P.; Huang, X.; Cao, Y.; Wang, B.; Li, Y.-H.; Jin, W.; Yu, C.; Zhang, J.; Zhang, Q.; Peng, C.-Z.; et al. Single-photon computational 3D imaging at 45 km. Photon. Res. 2020, 8, 1532. [Google Scholar] [CrossRef]
- Rapp, J.; Ma, Y.; Dawson, R.M.A.; Goyal, V.K. High-flux single-photon lidar. Optica 2021, 8, 30. [Google Scholar] [CrossRef]
- Shin, D.; Xu, F.; Venkatraman, D.; Lussana, R.; Villa, F.; Zappa, F.; Goyal, V.K.; Wong, F.N.C.; Shapiro, J.H. Photon-efficient imaging with a single-photon camera. Nat. Commun. 2016, 7, 12046. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lindell, D.B.; O’Toole, M.; Wetzstein, G. Single-photon 3D imaging with deep sensor fusion. Acm Trans. Graph. 2018, 37, 113:1–113:12. [Google Scholar] [CrossRef]
- Cuomo, V.; di Girolamo, P.; Gagliardi, R.V.; Pappalardo, G.; Spinelli, N.; Velotta, R.; Boselli, A.; Berardi, V.; Bartoli, B. Lidar measurements of atmospheric transmissivity. Il Nuovo Cim. C 1995, 18, 209–222. [Google Scholar] [CrossRef] [Green Version]
- Redington, R.W. Elements of infrared technology: Generation, transmission and detection. Solid State Electron. 1962, 5, 361–363. [Google Scholar] [CrossRef]
- Kim, I.I.; Mcarthur, B.; Korevaar, E.J. Comparison of laser beam propagation at 785 nm and 1550 nm in fog and haze for optical wireless communications. Proc. Spie Int. Soc. Opt. Eng. 2001, 4214, 26–37. [Google Scholar]
- Al Naboulsi, M.C.; Sizun, H.; de Fornel, F. Fog attenuation prediction for optical and infrared waves. Opt. Eng. 2004, 43, 319. [Google Scholar] [CrossRef]
- Grabner, M.; Kvicera, V. The wavelength dependent model of extinction in fog and haze for free space optical communication. Opt. Express 2011, 19, 3379–3386. [Google Scholar] [CrossRef] [PubMed]
- Zhai, D.S.; Fu, H.L.; He, S.H. Study on the characteristic of laser ranging based on diffuse reflection. Astron. Res. Technol. 2009, 6, 13–19. [Google Scholar]
- Liu, Z.X.; Li, X.J.; Fan, X.J. Measurement technology study of laser target reflection characteristic. Electro-Opt. Technol. Appl. 2007, 22, 46–47. [Google Scholar]
- Liu, Z.; Hunt, W.; Vaughan, M.; Hostetler, C.; McGill, M.; Powell, K.; Winker, D.; Hu, Y. Estimating random errors due to shot noise in backscatter lidar observations. Appl. Opt. 2006, 45, 4437–4447. [Google Scholar] [CrossRef] [PubMed]
- Boutabba, N.; Grira, S.; Eleuch, H. Atomic population inversion and absorption dispersion-spectra driven by modified double-exponential quotient pulses in a three-level atom. Results Phys. 2021, 24, 104108. [Google Scholar] [CrossRef]
- Méjean, G.; Kasparian, J.; Yu, J.; Frey, S.; Salmon, E.; Wolf, J.P. Remote detection and identification of biological aerosols using a femtosecond terawatt lidar system. Appl. Phys. B 2004, 78, 535–537. [Google Scholar] [CrossRef]
- Cornette, W.M.; Shanks, J.G. Physically reasonable analytic expression for the single-scattering phase function. Appl. Opt. 1992, 31, 3152–3160. [Google Scholar] [CrossRef]
- Patanwala, S.M.; Gyongy, I.; Mai, H.; Aßmann, A.; Dutton, N.A.W.; Rae, B.R.; Henderson, R.K. A High-Throughput Photon Processing Technique for Range Extension of SPAD-Based LiDAR Receivers. IEEE Open J. Solid-State Circuits Soc. 2022, 2, 12–25. [Google Scholar] [CrossRef]
- Pasquinelli, K.; Lussana, R.; Tisa, S.; Villa, F.; Zappa, F. Single-photon detectors modelling and selection criteria for high-background LiDAR. IEEE Sens. J. 2020, 20, 7021–7032. [Google Scholar] [CrossRef]
- Starkov, A.V.; Noormohammadian, M.; Oppelug, U.G. A stoclastic model and a variance-reduction Monte-Carlo method for the calculation of light transport. Appl. Phys. B 1995, 60, 335–340. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Comment |
|---|---|
| Laser system | Onda 1064 nm, bright solution |
| Illumination wavelength | 1064 nm |
| Laser Repetition rate | 60 KHz |
| Average power | 2.59 W |
| Detectors | SPD500, Silicon Single Photon Avalanche Diode Detector |
| Histogram length | 65535 bin |
| Bin width | ~64 ps |
| FOV | Calibrated Distance | Measured Distance | Error | Variance |
|---|---|---|---|---|
| 88.5 m | 88.759 m | 0.259 m | 0.060 | |
| 32 mrad | 126.5 m | 126.566 m | 0.066 m | 0.001 |
| 159.9 m | 160.001 m | 0.101 m | 0.002 | |
| 72.4 m | 72.473 m | 0.073 m | 0.004 | |
| 160 mrad | 80.4 m | 80.527 m | 0.127 m | 0.090 |
| 122.1 m | 122.326 m | 0.226 m | 0.004 | |
| 63.2 m | 63.396 m | 0.196 m | 0.006 | |
| 220 mrad | 76.2 m | 76.412 m | 0.212 m | 0.001 |
| 109 m | 109.352 m | 0.352 m | 0.002 |
| FOV | Measured Distance | SNR | Detection Probability | False Alarm Rate |
|---|---|---|---|---|
| 88.759 m | 27 | 99.99% | 0.327% | |
| 32 mrad | 126.566 m | 20 | 99.99% | 0.301% |
| 160.001 m | 16 | 99.90% | 0.380% | |
| 72.473 m | 29 | 99.99% | 0.299% | |
| 160 mrad | 80.527 m | 25 | 99.99% | 0.309% |
| 122.326 m | 12 | 98.72% | 0.352% | |
| 63.396 m | 33 | 99.99% | 0.283% | |
| 220 mrad | 76.412 m | 18 | 99.97% | 0.301% |
| 109.352 m | 9 | 93.92% | 0.366% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Z.; Miao, Y.; Tang, D.; Yang, H.; Pan, W. Effect of Lidar Receiver Field of View on UAV Detection. Photonics 2022, 9, 972. https://doi.org/10.3390/photonics9120972
Chen Z, Miao Y, Tang D, Yang H, Pan W. Effect of Lidar Receiver Field of View on UAV Detection. Photonics. 2022; 9(12):972. https://doi.org/10.3390/photonics9120972
Chicago/Turabian StyleChen, Zijian, Yu Miao, Dan Tang, Hao Yang, and Wenwu Pan. 2022. "Effect of Lidar Receiver Field of View on UAV Detection" Photonics 9, no. 12: 972. https://doi.org/10.3390/photonics9120972