Image Degradation Model for Dynamic Star Maps in Multiple Scenarios

 and
and
Abstract
:1. Introduction
2. Motion Blur Degradation Model
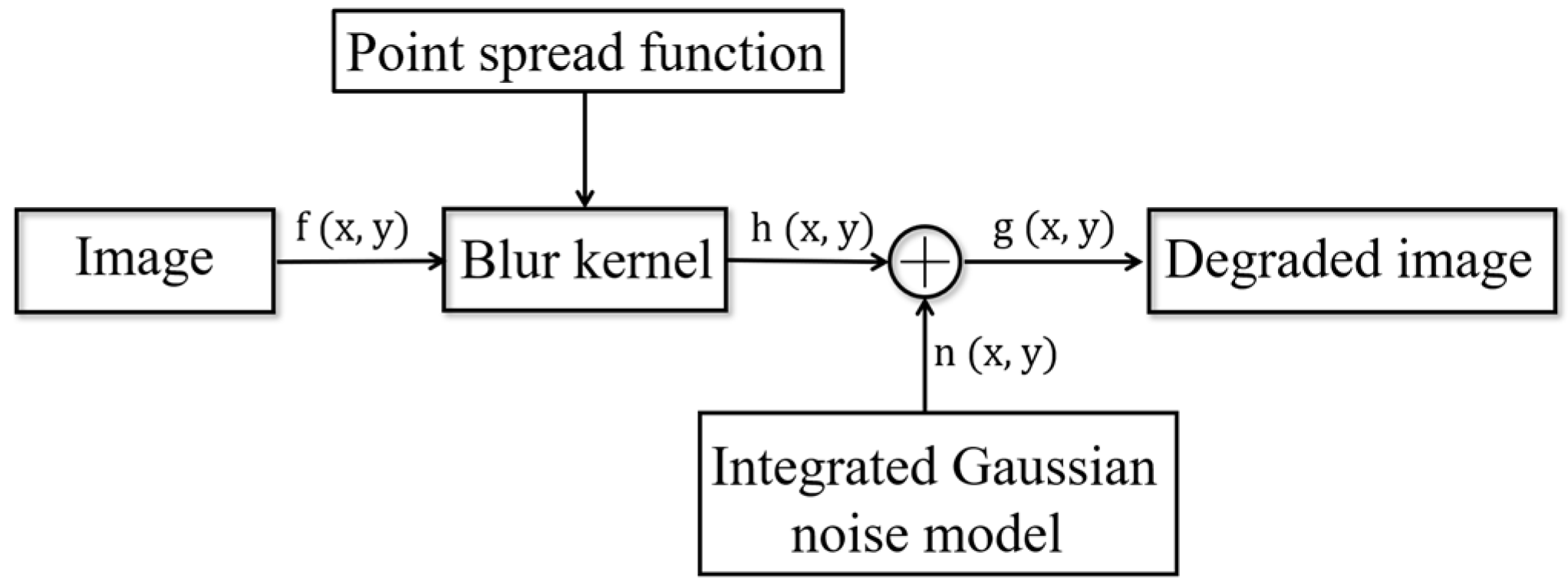
2.1. The Process of Image Degradation
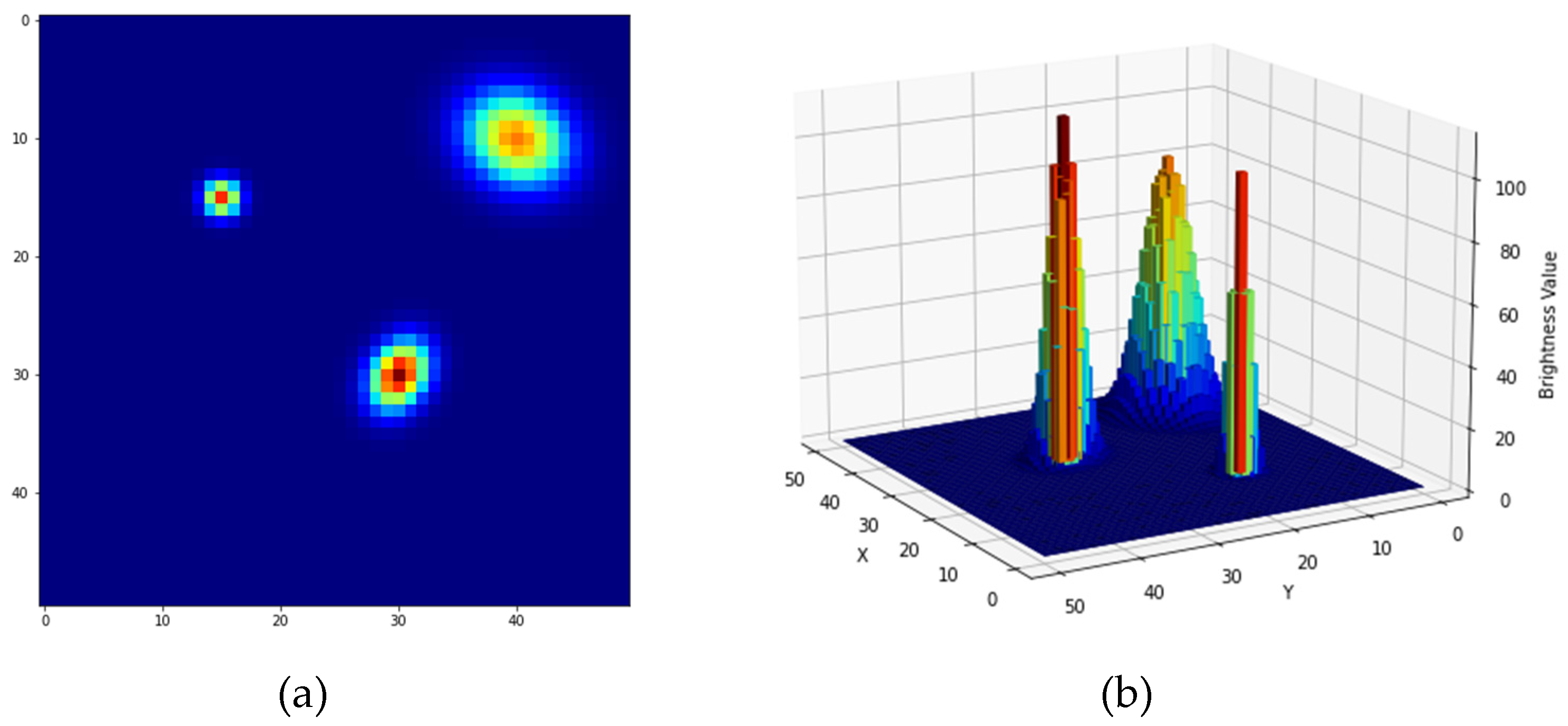
2.2. Simulations of Defocus Factor
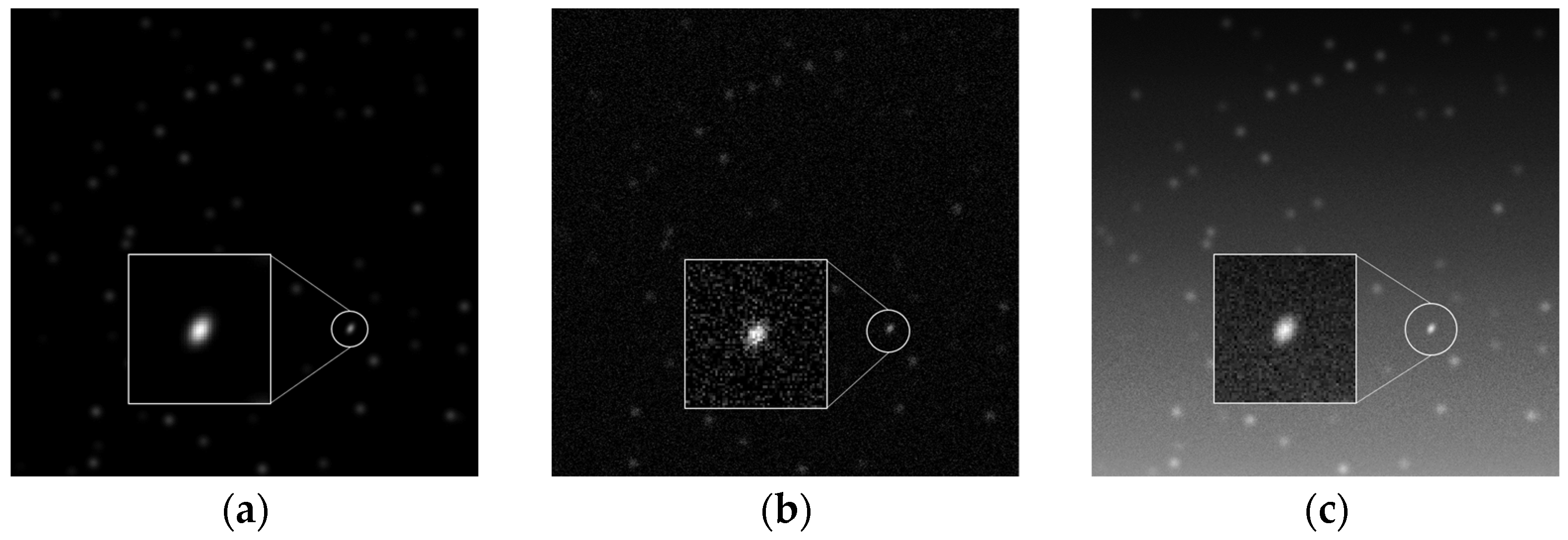
2.3. Integrated Gaussian Noise Model
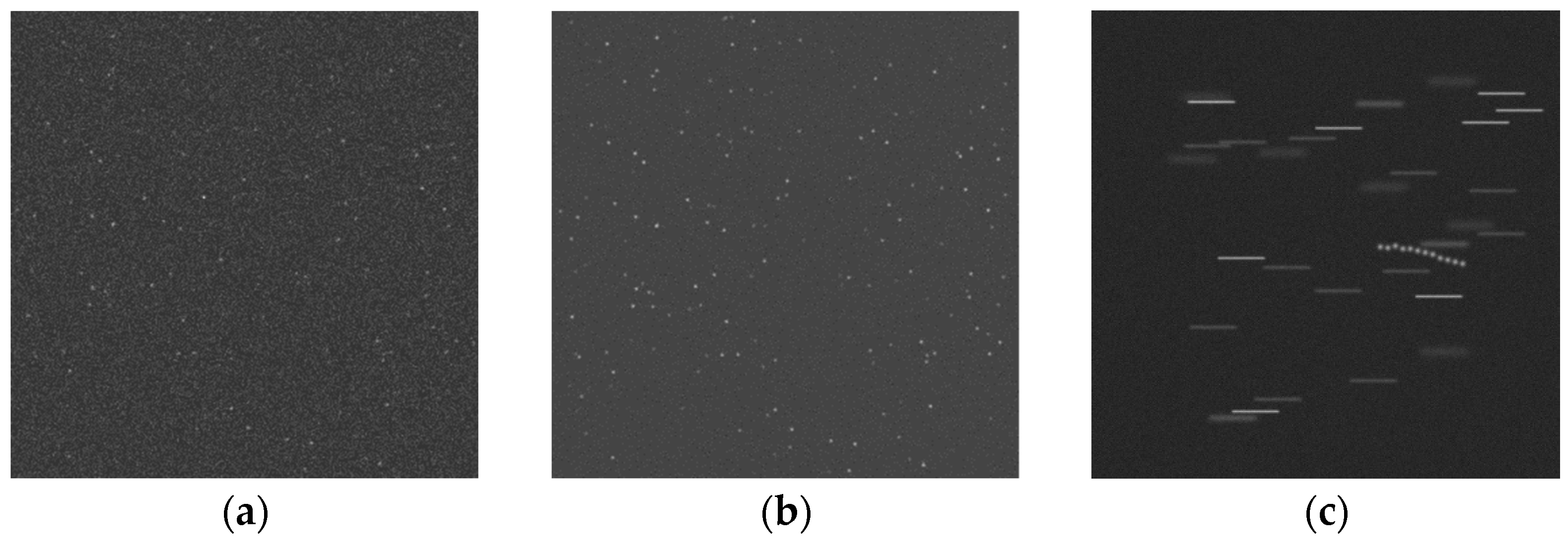
3. Simulations for Dynamic Sequence Star Maps
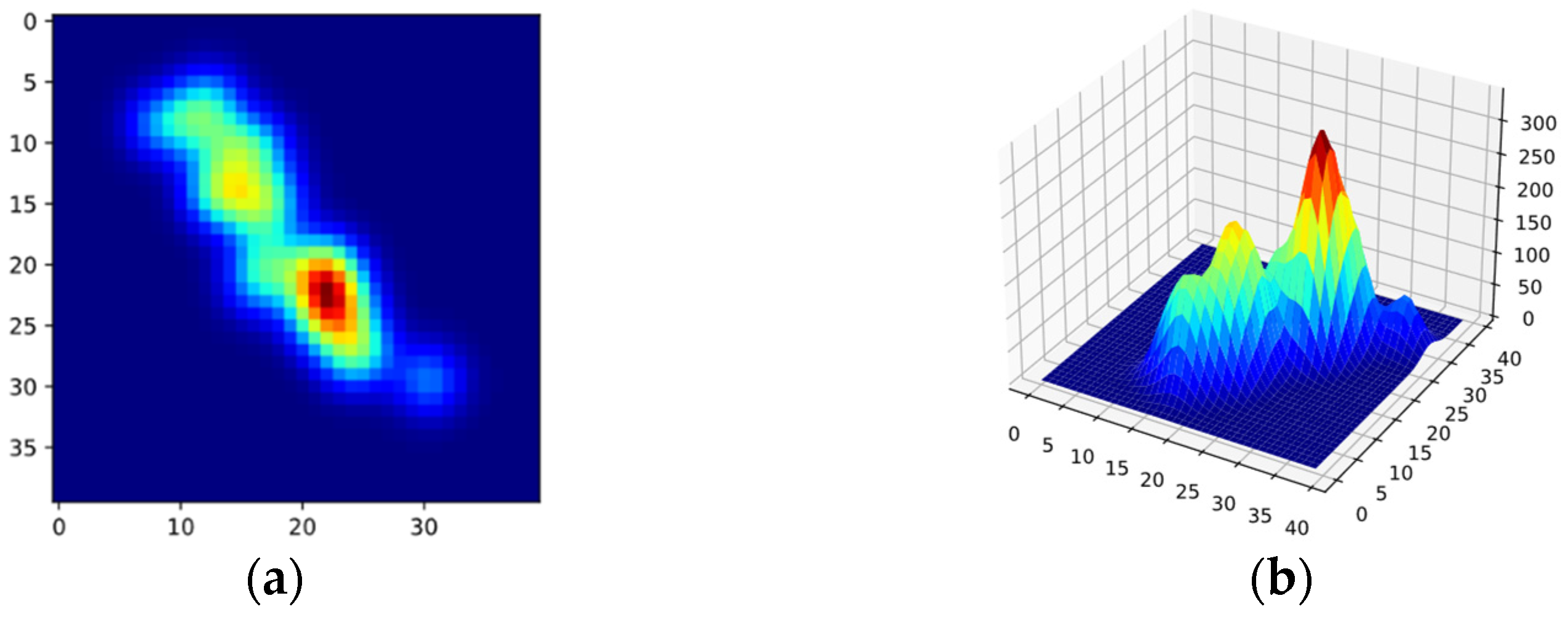
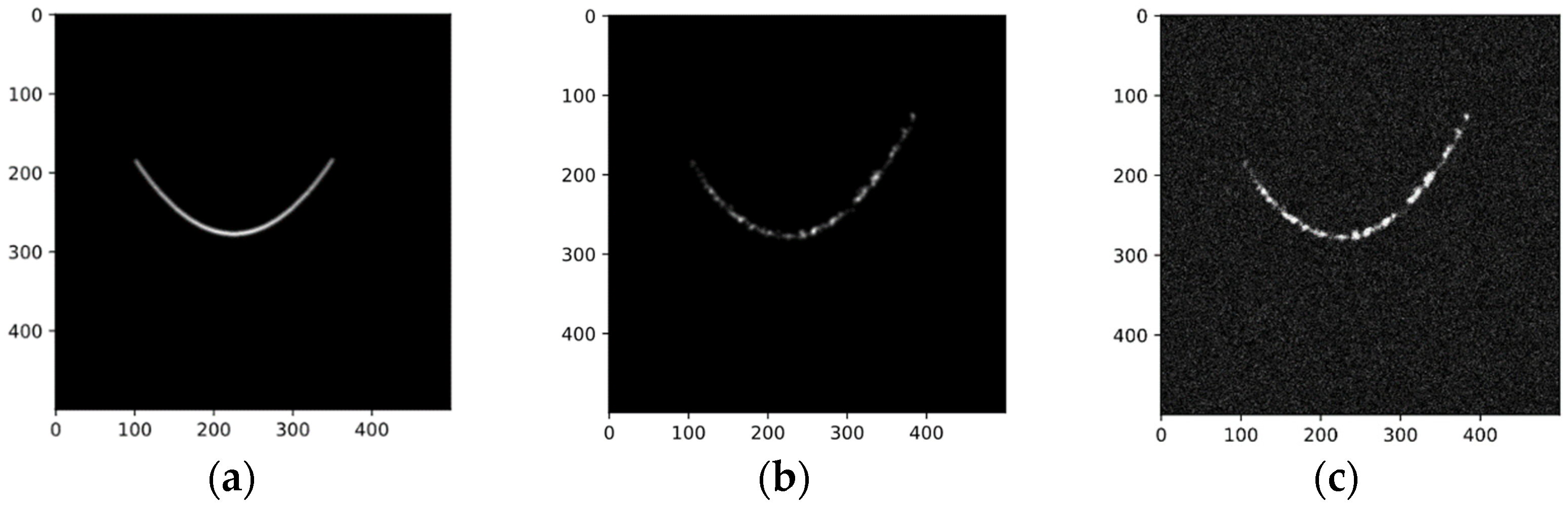
3.1. The Energy Distribution Model of Trajectory
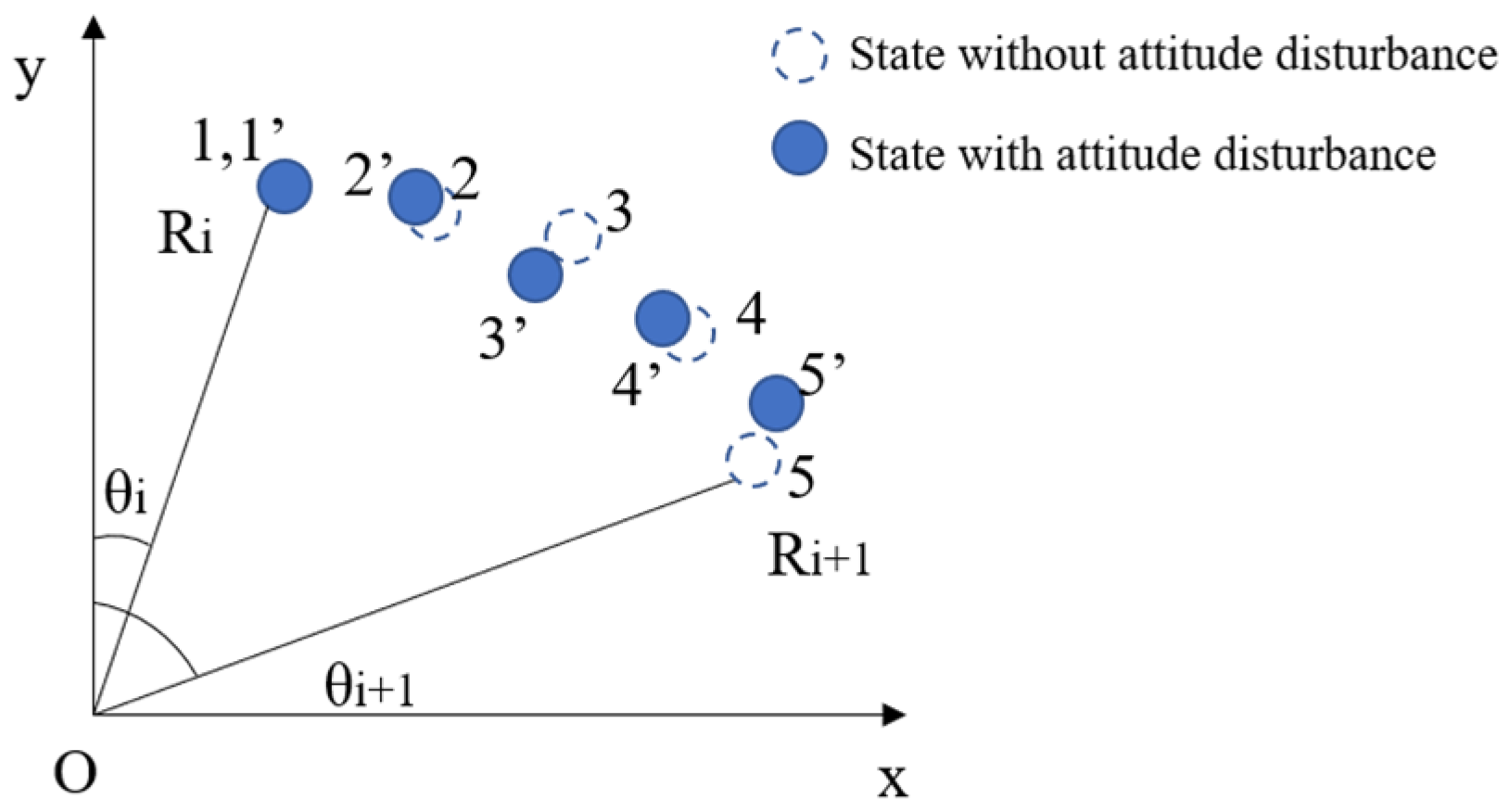
3.2. Attitude Disturbance Model
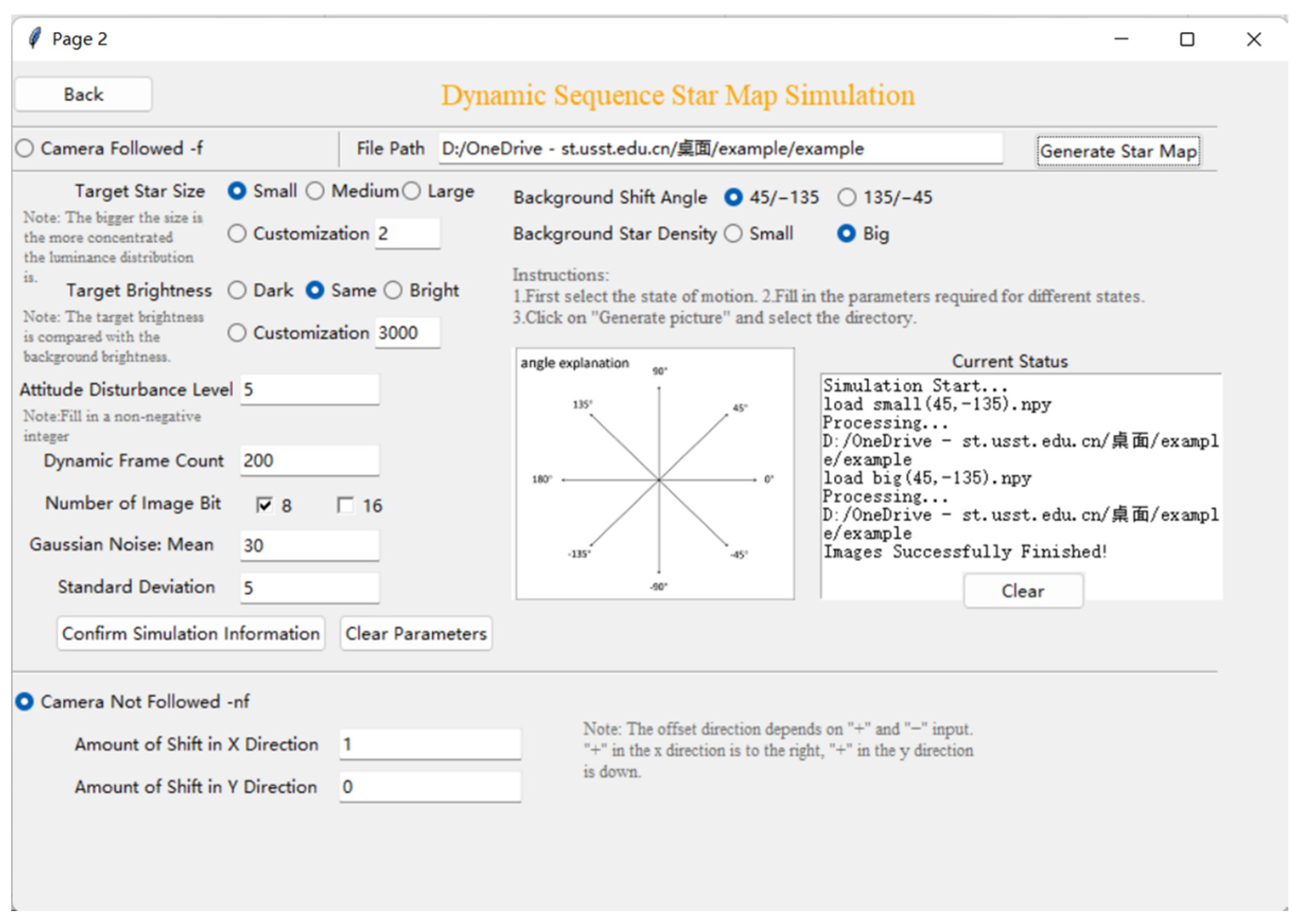
4. Interface Function Description
5. Results
5.1. Image Quality Assessment
5.2. Star Centroid Extraction
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Lu, R.; Wu, Y.P. An Approach of Star Image Simulation for Strapdown Star Sensor. Aerosp. Control. Appl. 2016, 42, 57–62. [Google Scholar] [CrossRef]
- Wang, H.Y.; Song, Z.F.; Li, J.J.; Xu, E.S.; Qin, T.M. Simulating method study on stray light noise out of sunlight baffle of star tracker. In SPIE 96750N, AOPC 2015: Image Processing and Analysis; SPIE: Bellingham, WA, USA, 2015; pp. 166–172. [Google Scholar] [CrossRef]
- Wei, X.G.; Zhang, G.J.; Fan, Q.Y.; Jiang, J. Ground function test method of star sensor using simulated sky image. Infrared Laser Eng. 2008, 37, 1087–1091. [Google Scholar]
- Xing, F.; Wu, Y.P.; Dong, Y.; You, Z. Research of laboratory test system for micro star tracker. Opt. Tech. 2004, 30, 703–705+709. [Google Scholar]
- Liu, H.B.; Su, D.Z.; Tan, J.; Yang, J.K.; Li, X.J. An approach to star image simulation for star sensor considering satellite orbit motion and effect of image shift. J. Astronaut. 2011, 32, 1190–1194. [Google Scholar] [CrossRef]
- Zheng, X.J.; Shen, J.; Wei, Z.; Wang, H.Y. Star map simulation and platform influence of airborne star sensor based on J-band data of 2MASS catalog. Infrared Phys. Technol. 2020, 111, 103541. [Google Scholar] [CrossRef]
- Wang, H.Y.; Yan, Z.Q.; Mao, X.N.; Wang, B.W.; Liu, X.; Kang, W. A new high-precision star map simulation model and experimental verification. J. Mod. Opt. 2021, 68, 856–867. [Google Scholar] [CrossRef]
- Yang, J.; Liang, B.; Zhang, T.; Song, J.Y.; Song, L.L. Laboratory Test System Design for Star Sensor Performance Evaluation. J. Comput. 2012, 7, 1056–1063. [Google Scholar] [CrossRef]
- Liu, F.C.; Liu, Z.H.; Liu, W.; Liang, D.S.; Yuan, H. Space target sequence image simulation based on STK/matlab. Infrared Laser Eng. 2014, 43, 3157–3161. [Google Scholar]
- Yan, J.Y.; Liu, H.; Zhao, W.Q.; Jiang, J. Dynamic real-time star map simulation based on convolution surface. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 681–686. [Google Scholar] [CrossRef]
- Wang, Y.P.; Niu, Z.D.; Song, L. A Simulation Algorithm of The Space-based Optical Star Map with Any Length of Exposure Time. In Proceedings of the 2021 International Conference of Optical Imaging and Measurement (ICOIM), Xi’an, China, 2 September 2021; pp. 72–76. [Google Scholar] [CrossRef]
- Zhu, P.; Jiang, Z.; Zhang, J.L.; Zhang, Y.; Wu, P. Remote sensing image watermarking based on motion blur degeneration and restoration model. Optik 2021, 248, 168018. [Google Scholar] [CrossRef]
- Wang, H.Y.; Wang, T.F.; Zhu, H.Y.; Liu, T.; Ge, C.J. Method for Determining Optimal Radius Value of Defocused Image Spot of Star Sensor. Laser Optoelectron. Prog. 2019, 56, 101101. [Google Scholar] [CrossRef]
- Zhang, G.J. Star Identification; Springer: Berlin/Heidelberg, Germany, 2017; pp. 53–55. [Google Scholar] [CrossRef]
- Wang, H.Y.; Zhou, W.R.; Lin, H.Y.; Wang, X.L. Parameter Estimation of Gaussian Gray Diffusion Model of Static Image Spot. Acta Opt. Sin. 2012, 32, 0323004. [Google Scholar] [CrossRef]
- Zhi, S.; Zhang, L.; Li, X.L. Realization of simulated star map with noise. Chin. J. Opt. Appl. Opt. 2014, 7, 581–587. [Google Scholar] [CrossRef]
- Gao, Y.; Lin, Z.P.; Li, J.; An, W.; Xu, H. Imaging Simulation Algorithm for Star Field Based on CCD PSF and Space Targets Striation Characteristic. Electron. Inf. Warf. Technol. 2008, 23, 58–62. [Google Scholar]
- He, Y.Y.; Wang, H.L.; Feng, L.; You, S.H.; Chen, Z.K. Star spot motion trajectory modeling and error evaluation under large angular velocity. J. Beijing Univ. Aeronaut. Astronaut. 2019, 45, 1653–1662. [Google Scholar] [CrossRef]
- Wang, C.Q.; Shen, X.L.; Li, L. Analysis on image similarity calculation algorithm. Mod. Electron. Tech. 2019, 42, 31–38. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | A | σx | σy |
|---|---|---|---|
| (15, 15) | 613 | 1.0 | 1.0 |
| (30, 30) | 2113 | 2.0 | 1.5 |
| (40, 10) | 4113 | 2.5 | 3.0 |
| Number | Bhattacharyya Coefficient in Gray Histogram | Cosine Similarity |
|---|---|---|
| Figure 12a vs. Figure 13a | 0.778 | 0.977 |
| Figure 12b vs. Figure 13b | 0.639 | 0.992 |
| Figure 12c vs. Figure 13c | 0.639 | 0.893 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Jin, Y.; Hu, Y.; Zhang, D.; Yu, Y.; Liu, J.; Li, J.; Jiang, X.; Yu, X. Image Degradation Model for Dynamic Star Maps in Multiple Scenarios. Photonics 2022, 9, 673. https://doi.org/10.3390/photonics9100673
Yang H, Jin Y, Hu Y, Zhang D, Yu Y, Liu J, Li J, Jiang X, Yu X. Image Degradation Model for Dynamic Star Maps in Multiple Scenarios. Photonics. 2022; 9(10):673. https://doi.org/10.3390/photonics9100673
Chicago/Turabian StyleYang, Haima, Yan Jin, Yinan Hu, Dawei Zhang, Yong Yu, Jin Liu, Jun Li, Xiaohui Jiang, and Xiaojun Yu. 2022. "Image Degradation Model for Dynamic Star Maps in Multiple Scenarios" Photonics 9, no. 10: 673. https://doi.org/10.3390/photonics9100673