Remote Operation of an Open-Path, Laser-Based Instrument for Atmospheric CO2 and CH4 Monitoring


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
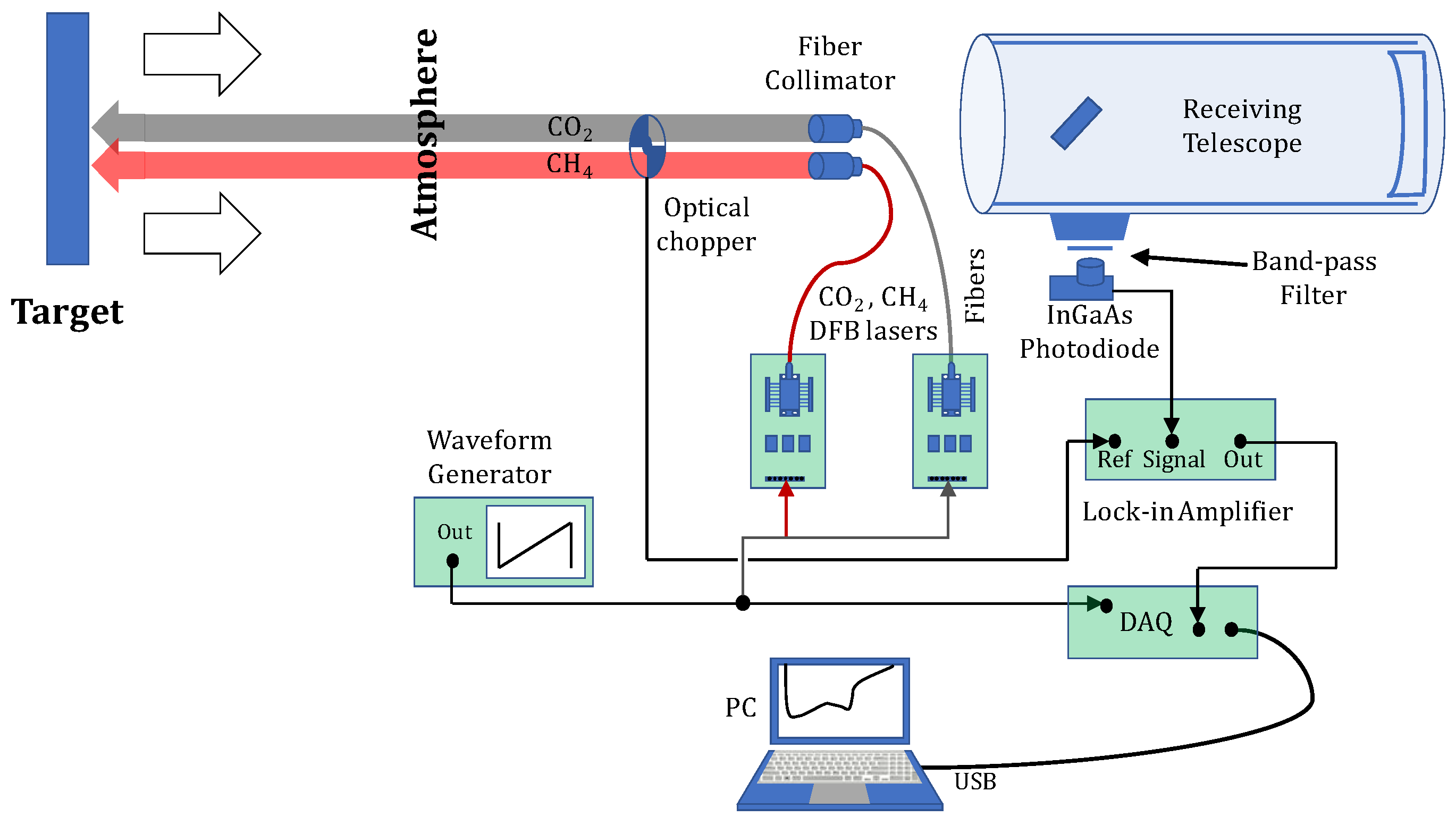
2.1. DIAL Methodology
2.2. Design and Manufacturing
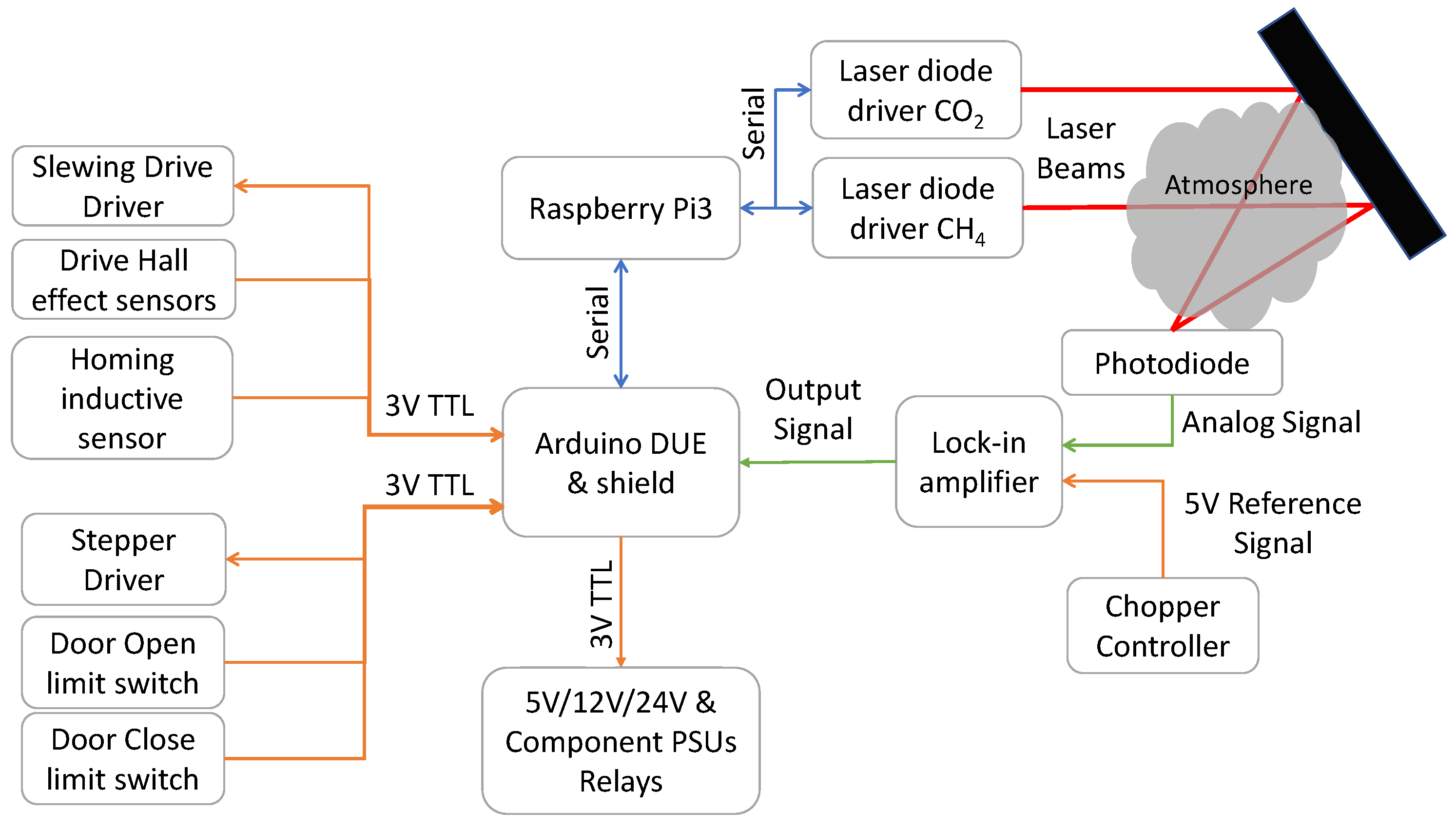
2.3. Hardware
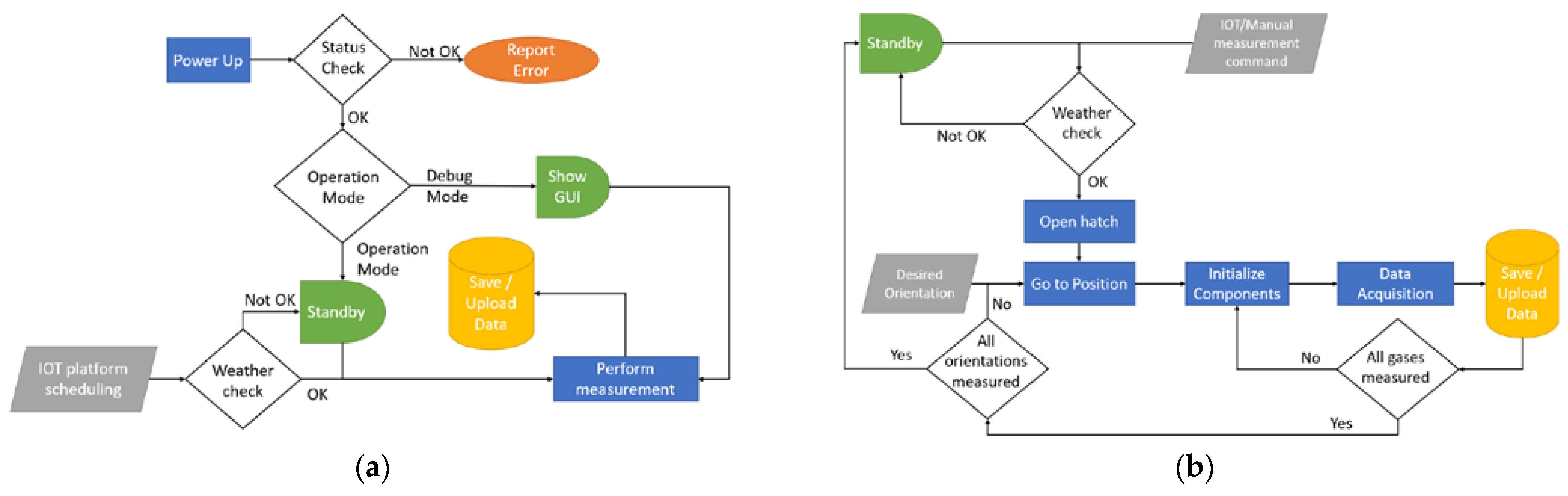
2.4. Software
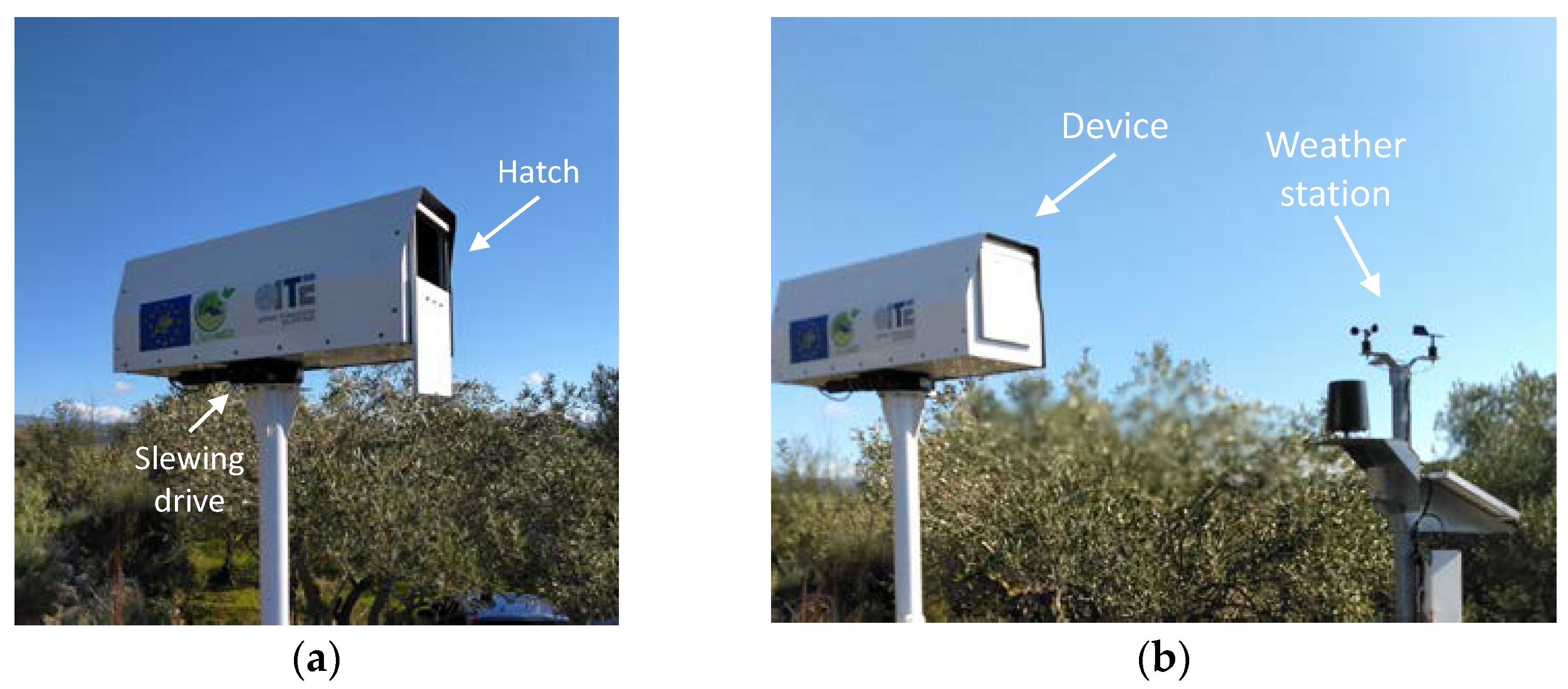
2.5. Installation and Testing Location
3. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Solazzo, E.; Crippa, M.; Guizzardi, D.; Muntean, M.; Choulga, M.; Janssens-Maenhout, G. Uncertainties in the Emissions Database for Global Atmospheric Research (EDGAR) Emission Inventory of Greenhouse Gases. Atmos. Chem. Phys. 2021, 21, 5655–5683. [Google Scholar] [CrossRef]
- European Commission; Joint Research Centre; Institute for Environment and Sustainability. Uncertainty Estimates and Guidance for Road Transport Emission Calculations; Publications Office of the European Union: Luxembourg, 2010; ISBN 978-92-79-15307-5. [Google Scholar]
- Marland, G. Uncertainties in Accounting for CO2 From Fossil Fuels. J. Ind. Ecol. 2008, 12, 136–139. [Google Scholar] [CrossRef]
- Lloyd, C.R.; Rebelo, L.-M.; Max Finlayson, C. Providing Low-Budget Estimations of Carbon Sequestration and Greenhouse Gas Emissions in Agricultural Wetlands. Environ. Res. Lett. 2013, 8, 015010. [Google Scholar] [CrossRef] [Green Version]
- Verifying Greenhouse Gas Emissions: Methods to Support International Climate Agreements; National Research Council (U.S.); National Research Council (U.S.); National Research Council (U.S.) (Eds.) National Academies Press: Washington, DC, USA, 2010; ISBN 978-0-309-15211-2. [Google Scholar]
- Wang, F.; Cheng, Y.; Xue, Q.; Wang, Q.; Liang, R.; Wu, J.; Sun, J.; Zhu, C.; Li, Q. Techniques to Enhance the Photoacoustic Signal for Trace Gas Sensing: A Review. Sens. Actuators A Phys. 2022, 345, 113807. [Google Scholar] [CrossRef]
- Picqué, N.; Hänsch, T.W. Frequency Comb Spectroscopy. Nat. Photon 2019, 13, 146–157. [Google Scholar] [CrossRef] [Green Version]
- Queißer, M.; Burton, M.; Fiorani, L. Differential Absorption Lidar for Volcanic CO2 Sensing Tested in an Unstable Atmosphere. Opt. Express 2015, 23, 6634. [Google Scholar] [CrossRef]
- Kern, C.; Trick, S.; Rippel, B.; Platt, U. Applicability of Light-Emitting Diodes as Light Sources for Active Differential Optical Absorption Spectroscopy Measurements. Appl. Opt. 2006, 45, 2077. [Google Scholar] [CrossRef]
- Ohyama, H.; Kawakami, S.; Tanaka, T.; Morino, I.; Uchino, O.; Inoue, M.; Sakai, T.; Nagai, T.; Yamazaki, A.; Uchiyama, A.; et al. Observations of XCO2 and XCH4 with Ground-Based High-Resolution FTS at Saga, Japan, and Comparisons with GOSAT Products. Atmos. Meas. Tech. 2015, 8, 5263–5276. [Google Scholar] [CrossRef] [Green Version]
- Griffith, D.W.T.; Pöhler, D.; Schmitt, S.; Hammer, S.; Vardag, S.N.; Platt, U. Long Open-Path Measurements of Greenhouse Gases in Air Using near-Infrared Fourier Transform Spectroscopy. Atmos. Meas. Tech. 2018, 11, 1549–1563. [Google Scholar] [CrossRef] [Green Version]
- Butz, A.; Guerlet, S.; Hasekamp, O.; Schepers, D.; Galli, A.; Aben, I.; Frankenberg, C.; Hartmann, J.-M.; Tran, H.; Kuze, A.; et al. Toward Accurate CO2 and CH4 Observations from GOSAT: GOSAT CO 2 AND CH 4 VALIDATION. Geophys. Res. Lett. 2011, 38, L14812. [Google Scholar] [CrossRef] [Green Version]
- Wunch, D.; Toon, G.C.; Blavier, J.-F.L.; Washenfelder, R.A.; Notholt, J.; Connor, B.J.; Griffith, D.W.T.; Sherlock, V.; Wennberg, P.O. The Total Carbon Column Observing Network. Phil. Trans. R. Soc. A 2011, 369, 2087–2112. [Google Scholar] [CrossRef] [Green Version]
- Frey, M.; Sha, M.K.; Hase, F.; Kiel, M.; Blumenstock, T.; Harig, R.; Surawicz, G.; Deutscher, N.M.; Shiomi, K.; Franklin, J.E.; et al. Building the COllaborative Carbon Column Observing Network (COCCON): Long-Term Stability and Ensemble Performance of the EM27/SUN Fourier Transform Spectrometer. Atmos. Meas. Tech. 2019, 12, 1513–1530. [Google Scholar] [CrossRef] [Green Version]
- Helmut, H.T.; Ureña, A.G.; Robert, J. Donovan Environmental and Other Analytical Applications. In Laser Chemistry: Spectroscopy, Dynamics and Applications; John Wiley & Sons: Chichester, UK; Hoboken, NJ, USA, 2007; pp. 395–408. ISBN 978-0-471-48570-4. [Google Scholar]
- Lackner, M. Tunable Diode Laser Absorption Spectroscopy (TDLAS) in the Process Industries—A Review. Rev. Chem. Eng. 2007, 23, 65. [Google Scholar] [CrossRef]
- Xin, F.; Li, J.; Guo, J.; Yang, D.; Wang, Y.; Tang, Q.; Liu, Z. Measurement of Atmospheric CO2 Column Concentrations Based on Open-Path TDLAS. Sensors 2021, 21, 1722. [Google Scholar] [CrossRef] [PubMed]
- Zimmerman, J.W.; Ii, R.A.L.; Blakley, C.S.; Frish, M.B.; Laderer, M.C.; Wainner, R.T. Tunable Diode Lase Absorption Spectrometers for CO2 Wellhead and Pipeline Leakage Monitoring: Experiences from Prototype Testing at the Illinois Basin—Decatur Project, USA. Energy Procedia 2014, 63, 4083–4094. [Google Scholar] [CrossRef] [Green Version]
- Bailey, D.M.; Adkins, E.M.; Miller, J.H. An Open-Path Tunable Diode Laser Absorption Spectrometer for Detection of Carbon Dioxide at the Bonanza Creek Long-Term Ecological Research Site near Fairbanks, Alaska. Appl. Phys. B 2017, 123, 245. [Google Scholar] [CrossRef]
- Xia, J.; Zhu, F.; Zhang, S.; Kolomenskii, A.; Dong, J.; Okada, K.; Strohaber, J.; Schuessler, H.A. Probing Greenhouse Gases in Turbulent Atmosphere by Long-Range Open-Path Wavelength Modulation Spectroscopy. Opt. Lasers Eng. 2019, 117, 21–28. [Google Scholar] [CrossRef]
- Liang, W.; Wei, G.; He, A.; Shen, H. A Novel Wavelength Modulation Spectroscopy in TDLAS. Infrared Phys. Technol. 2021, 114, 103661. [Google Scholar] [CrossRef]
- Li, J.; Yang, X.; Li, L.; Wang, Z.; He, L.; Wu, Z.; Du, Z. Simultaneous Standoff Sensing for Methane and Hydrogen Sulfide Using Wavelength-Modulated Laser Absorption Spectroscopy with Non-Cooperative Target. Sens. Actuators B Chem. 2023, 374, 132825. [Google Scholar] [CrossRef]
- Ismail, S.; Browell, E.V. LIDAR|Differential Absorption Lidar. In Encyclopedia of Atmospheric Sciences; North, G.R., Pyle, J., Zhang, F., Eds.; Elsevier: Amsterdam, The Netherlands, 2015; pp. 277–288. ISBN 978-0-12-382225-3. [Google Scholar]
- Differential Absorption Lidar Technique (DIAL). In Elastic Lidar: Theory, Practice, and Analysis Methods; Kovalev, V.A.; Eichinger , W.E. (Eds.) John Wiley: Hoboken, NJ, USA, 2004; ISBN 978-0-471-20171-7. [Google Scholar]
- Gordon, I.E.; Rothman, L.S.; Hargreaves, R.J.; Hashemi, R.; Karlovets, E.V.; Skinner, F.M.; Conway, E.K.; Hill, C.; Kochanov, R.V.; Tan, Y.; et al. The HITRAN2020 Molecular Spectroscopic Database. J. Quant. Spectrosc. Radiat. Transf. 2022, 277, 107949. [Google Scholar] [CrossRef]
- HITRAN on the Web. Available online: https://hitran.iao.ru/home (accessed on 1 February 2023).
- Liou, K.-N. An Introduction to Atmospheric Radiation, 2nd ed.; International Geophysics Series; Academic Press: Amsterdam, The Netherlands, 2002; ISBN 978-0-12-451451-5. [Google Scholar]
- Siozos, P.; Psyllakis, G.; Velegrakis, M. A Continuous-wave, Lidar Sensor Based on Water Vapour Absorption Lines at 1.52 Μm. Remote Sens. Lett. 2022, 13, 1164–1172. [Google Scholar] [CrossRef]
- Siozos, P.; Psyllakis, G.; Samartzis, P.C.; Velegrakis, M. Autonomous Differential Absorption Laser Device for Remote Sensing of Atmospheric Greenhouse Gases. Remote Sens. 2022, 14, 460. [Google Scholar] [CrossRef]
- Hellenic Land Registry. Available online: http://gis.ktimanet.gr/wms/ktbasemap/default.aspx (accessed on 2 February 2023).
- Lan, X.P.; Tans, K.W. Thoning Trends in Globally-Averaged CO2 Determined from NOAA Global Monitoring Laboratory Measurements. Version 2023-02. Available online: http://gml.noaa.gov/ccgg/trends/ (accessed on 4 March 2023).
- Lan, X.; Thoning, K.W.; Dlugokencky, E.J. Trends in Globally-Averaged CH4, N2O, and SF6 Determined from NOAA Global Monitoring Laboratory Measurements. Version 2023-01. Available online: https://doi.org/10.15138/P8XG-AA10 (accessed on 4 March 2023).
- Veefkind, J.P.; Aben, I.; McMullan, K.; Förster, H.; de Vries, J.; Otter, G.; Claas, J.; Eskes, H.J.; de Haan, J.F.; Kleipool, Q.; et al. TROPOMI on the ESA Sentinel-5 Precursor: A GMES Mission for Global Observations of the Atmospheric Composition for Climate, Air Quality and Ozone Layer Applications. Remote Sens. Environ. 2012, 120, 70–83. [Google Scholar] [CrossRef]
- Copernicus Data Space Ecosystem. Available online: https://dataspace.copernicus.eu/ (accessed on 1 February 2023).










Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siozos, P.; Psyllakis, G.; Velegrakis, M. Remote Operation of an Open-Path, Laser-Based Instrument for Atmospheric CO2 and CH4 Monitoring. Photonics 2023, 10, 386. https://doi.org/10.3390/photonics10040386
Siozos P, Psyllakis G, Velegrakis M. Remote Operation of an Open-Path, Laser-Based Instrument for Atmospheric CO2 and CH4 Monitoring. Photonics. 2023; 10(4):386. https://doi.org/10.3390/photonics10040386
Chicago/Turabian StyleSiozos, Panagiotis, Giannis Psyllakis, and Michalis Velegrakis. 2023. "Remote Operation of an Open-Path, Laser-Based Instrument for Atmospheric CO2 and CH4 Monitoring" Photonics 10, no. 4: 386. https://doi.org/10.3390/photonics10040386