
Numerical Aspects of a Continuum Sintering Model Formulated in the Standard Dissipative Framework

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sintering Model

3. Spatial and Temporal Discretization
3.1. Variationally Consistent Method

3.2. -Family

3.3. Modified -Family
 is solved. Based on the resulting predicted values, the corrector problem is
is solved. Based on the resulting predicted values, the corrector problem is
3.4. Numerical Solution Algorithm and Implementation
3.5. Normalization and Initial Conditions
4. Numerical Experiments
4.1. General Approach
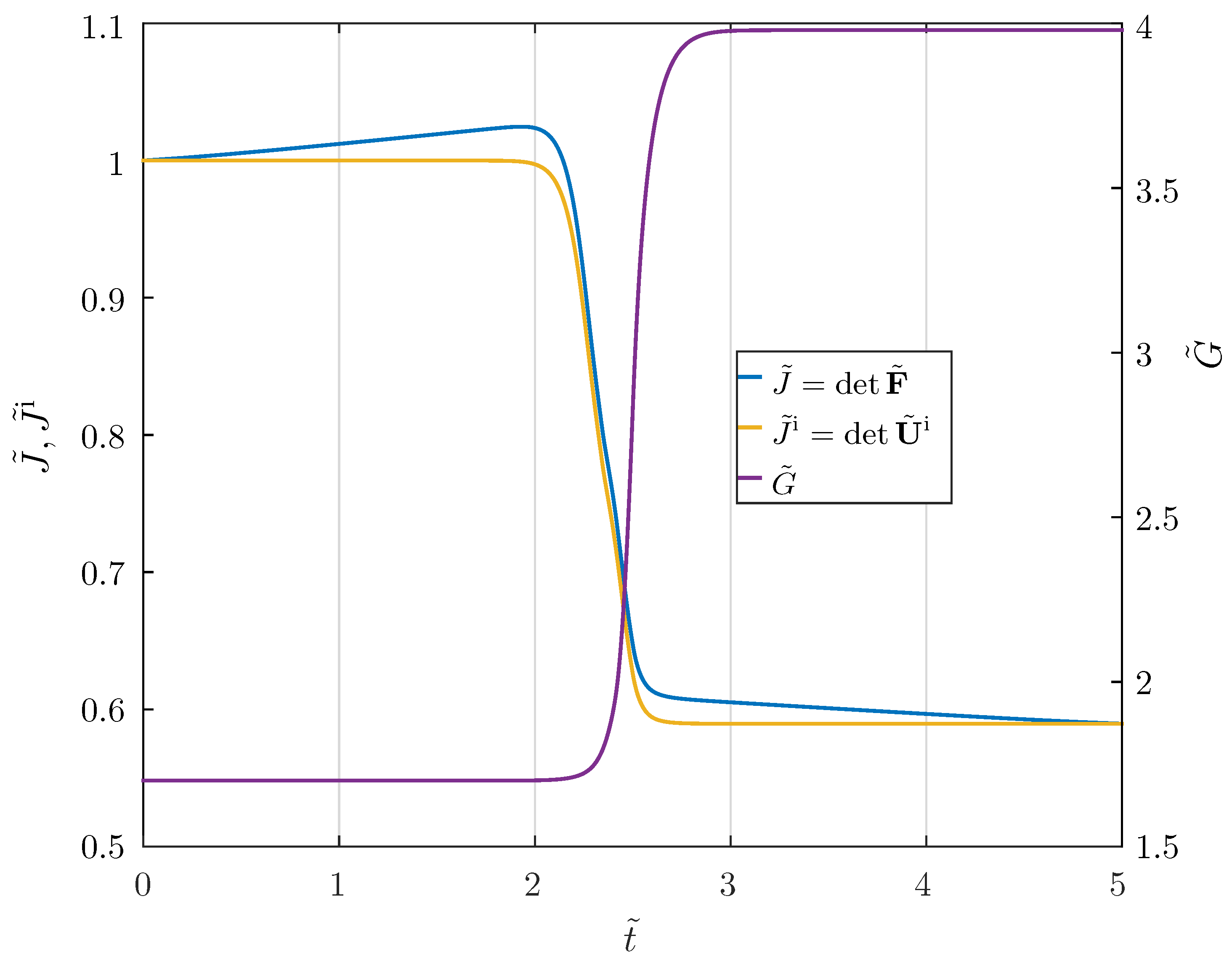
4.2. Numerical Experiment 1
Results
4.3. Numerical Experiment 2
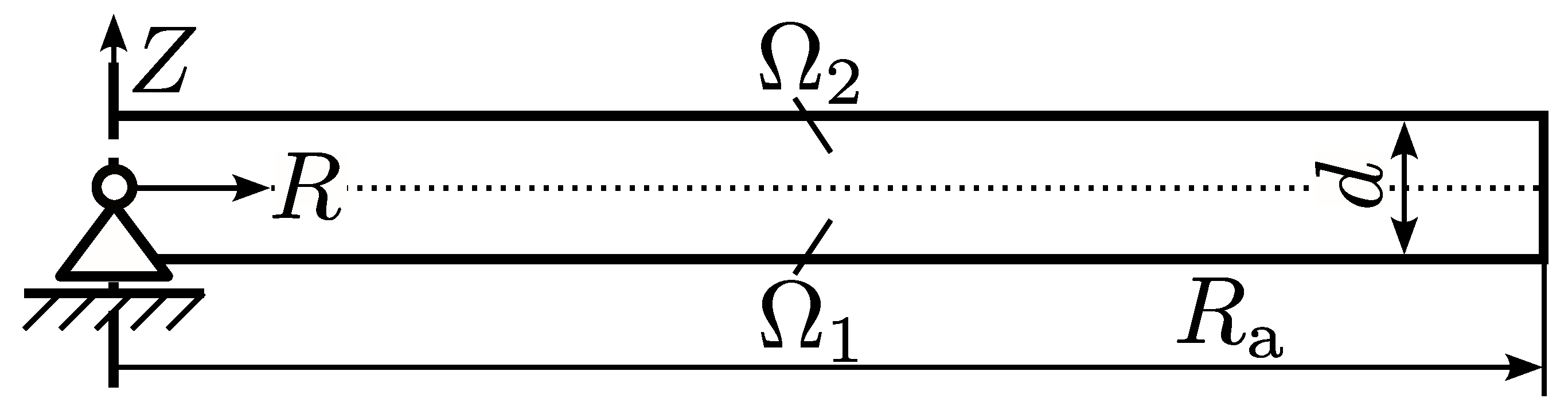
4.3.1. Finite Element Grid
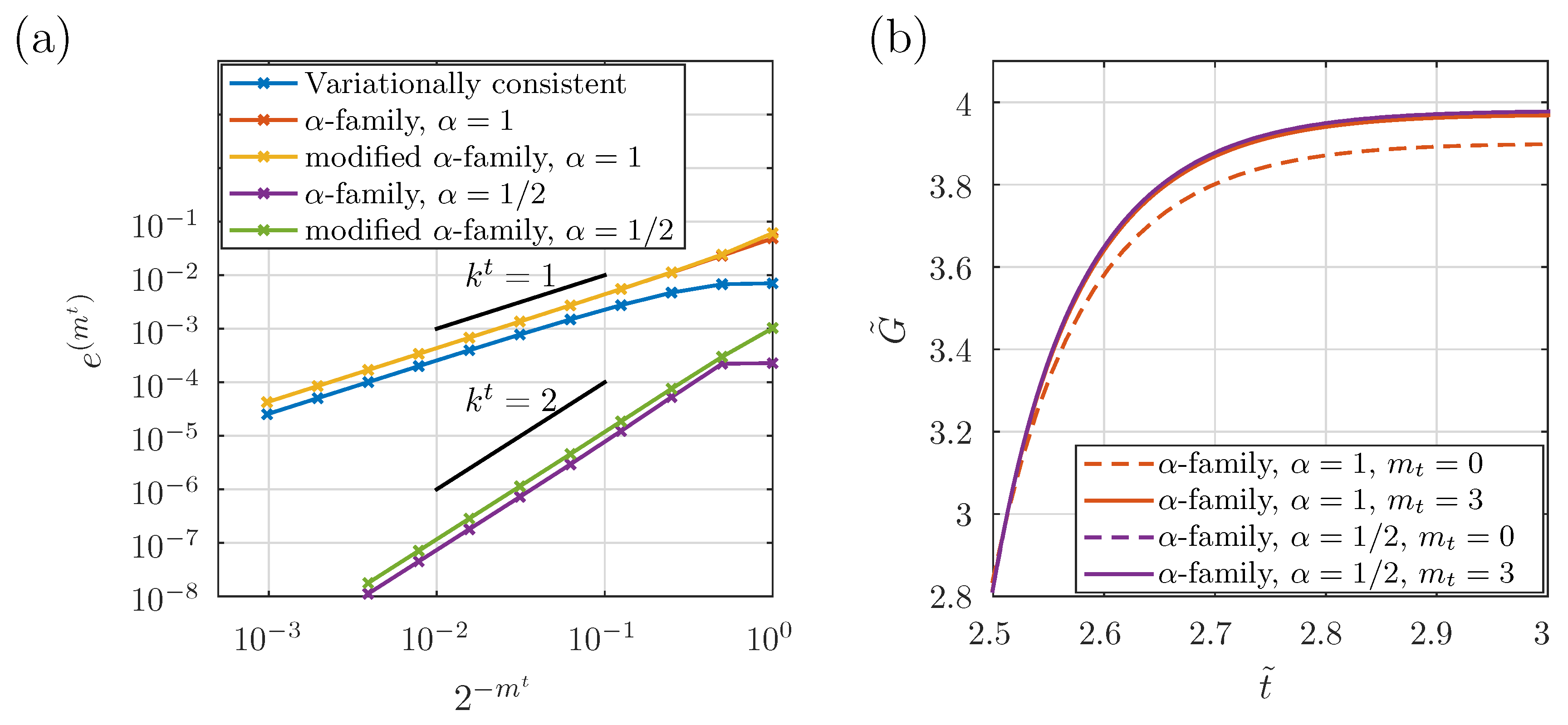
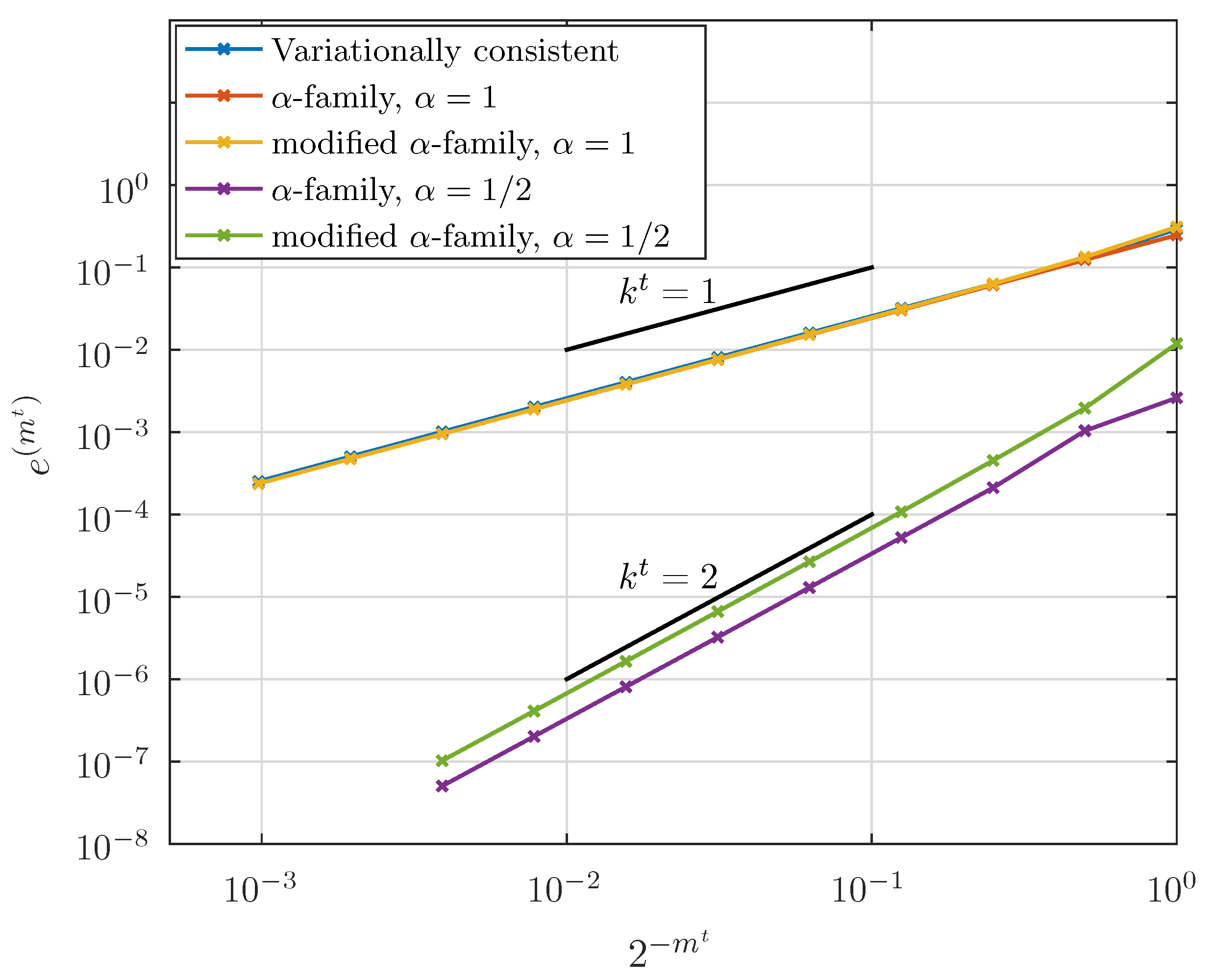
4.3.2. Results
5. Concluding Remarks
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Constitutive Equations of the Sintering Model
Appendix A.1. Helmholtz Free Energy Density ψ
Appendix A.2. Local Dissipation Function δ ˚
Appendix A.3. Local Form of the Constitutive Equations
References
- Zipse, H. Finite-element simulation of the die pressing and sintering of a ceramic component. J. Eur. Ceram. Soc. 1997, 17, 1707–1713. [Google Scholar] [CrossRef]
- Kraft, T.; Riedel, H. Numerical simulation of solid state sintering; model and application. J. Eur. Ceram. Soc. 2004, 24, 345–361. [Google Scholar] [CrossRef]
- Sarbandi, B.; Cartel, S.; Besson, J.; Ryckelynck, D. Truncated Integration for Simultaneous Simulation of Sintering Using a Separated Representation. Arch. Comput. Methods Eng. 2010, 17, 455–463. [Google Scholar] [CrossRef]
- Stark, S.; Neumeister, P. A continuum model for sintering processes incorporating elasticity effects. Mech. Mater. 2018, 122, 26–41. [Google Scholar] [CrossRef]
- Stark, S. On a certain class of one step temporal integration methods for standard dissipative continua. Comput. Mech. 2021, 67, 265–287. [Google Scholar] [CrossRef]
- Simo, J.C.; Pister, K.S. Remarks on rate constitutive equations for finite deformation problems: Computational implications. Comput. Methods Appl. Mech. Eng. 1984, 46, 201–215. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Gattu, M.; Vorel, J. Work conjugacy error in commercial finite-element codes: Its magnitude and how to compensate for it. Proc. R. Soc. A Math. Phys. Eng. Sci. 2012, 468, 3047–3058. [Google Scholar] [CrossRef]
- Halphen, B.; Nguyen, Q.S. Sur les matériaux standard généralisés. J. Mécanique 1975, 14, 39–63. [Google Scholar]
- Germain, P.; Nguyen, Q.S.; Suquet, P. Continuum Thermodynamics. J. Appl. Mech. 1983, 50, 1010–1020. [Google Scholar] [CrossRef]
- Miehe, C. A multi-field incremental variational framework for gradient-extended standard dissipative solids. J. Mech. Phys. Solids 2011, 59, 898–923. [Google Scholar] [CrossRef]
- McBride, A.T.; Reddy, B.D.; Steinmann, P. Dissipation-consistent modelling and classification of extended plasticity formulations. J. Mech. Phys. Solids 2018, 119, 118–139. [Google Scholar] [CrossRef]
- Alzetta, G.; Arndt, D.; Bangerth, W.; Boddu, V.; Brands, B.; Davydov, D.; Gassmoeller, R.; Heister, T.; Heltai, L.; Kormann, K.; et al. The deal.II Library, Version 9.0. J. Numer. Math. 2018, 26, 173–183. [Google Scholar] [CrossRef]
- Bangerth, W.; Hartmann, R.; Kanschat, G. deal.II—A General Purpose Object Oriented Finite Element Library. ACM Trans. Math. Softw. 2007, 33, 24/1–24/27. [Google Scholar] [CrossRef]
- Stark, S. A systematic approach to standard dissipative continua. Axioms 2023, 12, 267. [Google Scholar] [CrossRef]
- Kluge, T. Cubic Spline Interpolation Library. 2021. Available online: https://kluge.in-chemnitz.de/opensource/spline/ (accessed on 23 April 2023).





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stark, S. Numerical Aspects of a Continuum Sintering Model Formulated in the Standard Dissipative Framework. Math. Comput. Appl. 2023, 28, 69. https://doi.org/10.3390/mca28030069
Stark S. Numerical Aspects of a Continuum Sintering Model Formulated in the Standard Dissipative Framework. Mathematical and Computational Applications. 2023; 28(3):69. https://doi.org/10.3390/mca28030069
Chicago/Turabian StyleStark, Sebastian. 2023. "Numerical Aspects of a Continuum Sintering Model Formulated in the Standard Dissipative Framework" Mathematical and Computational Applications 28, no. 3: 69. https://doi.org/10.3390/mca28030069