
An Improved Hybrid Aquila Optimizer and Harris Hawks Algorithm for Solving Industrial Engineering Optimization Problems




Abstract
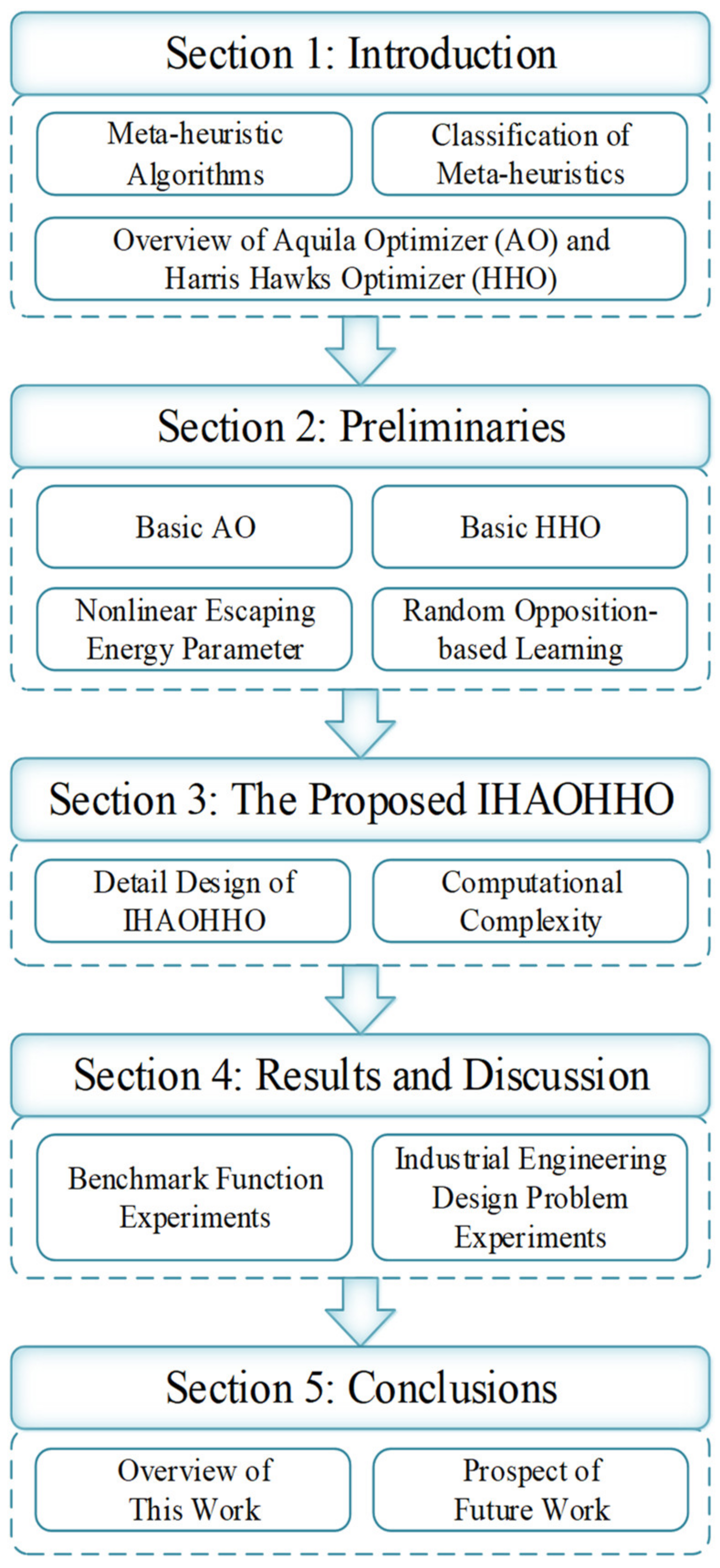
:1. Introduction
2. Preliminaries
2.1. Aquila Optimizer (AO)
- Step 1:
- Expanded exploration (X1): high soar with a vertical stoop
- Step 2:
- Narrowed exploration (X2): contour flight with short glide attack
- Step 3:
- Expanded exploitation (X3): low flight with a slow descent attack
- Step 4:
- Narrowed exploitation (X4): walking and grabbing prey
2.2. Harris’s Hawks Optimizer (HHO)
2.2.1. Exploration Phase
2.2.2. Transition from Exploration to Exploitation Phase
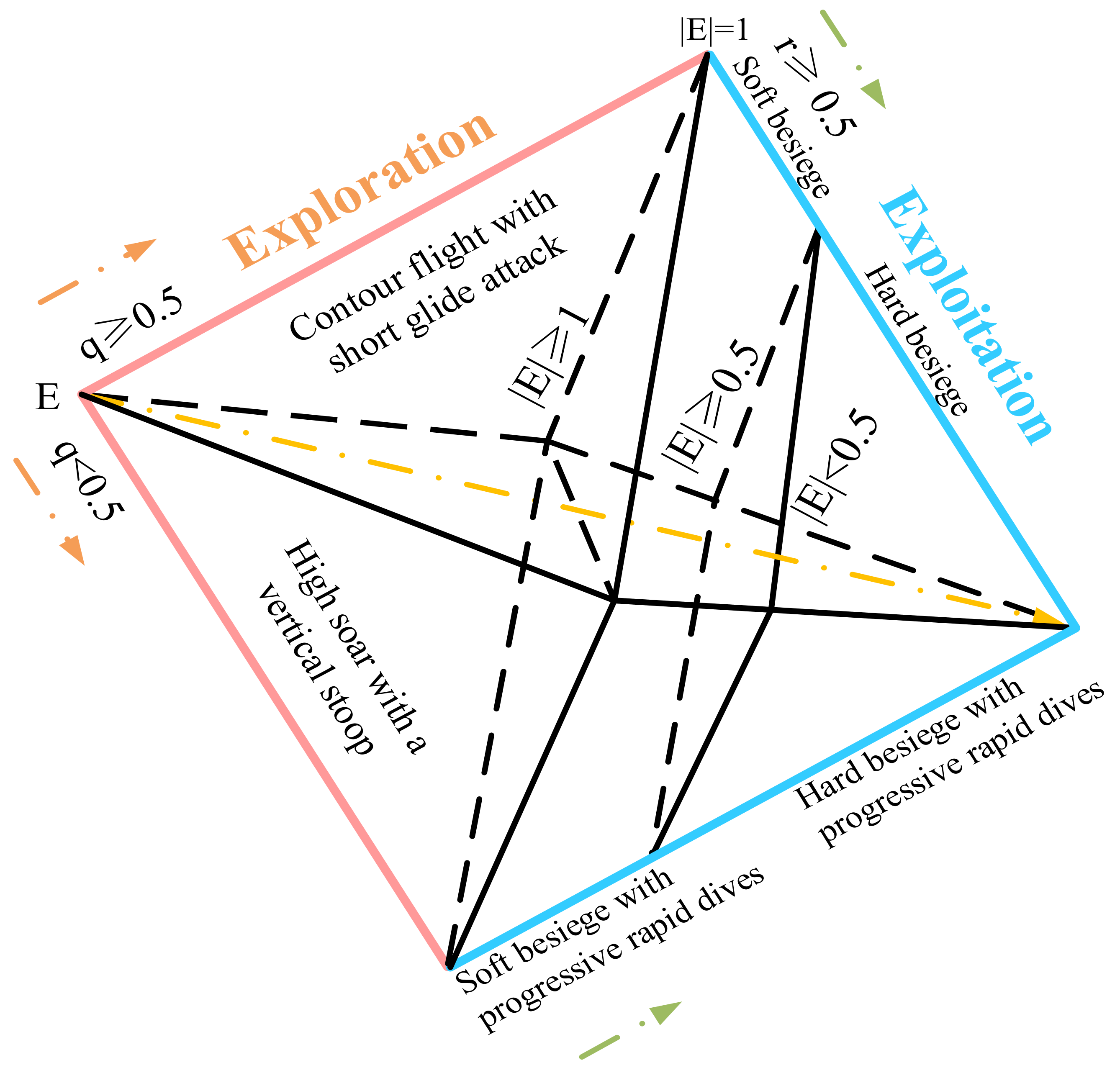
2.2.3. Exploitation Phase
- Soft besiege
- Hard besiege
- Soft besiege with progressive rapid dives
- Hard besiege with progressive rapid dives
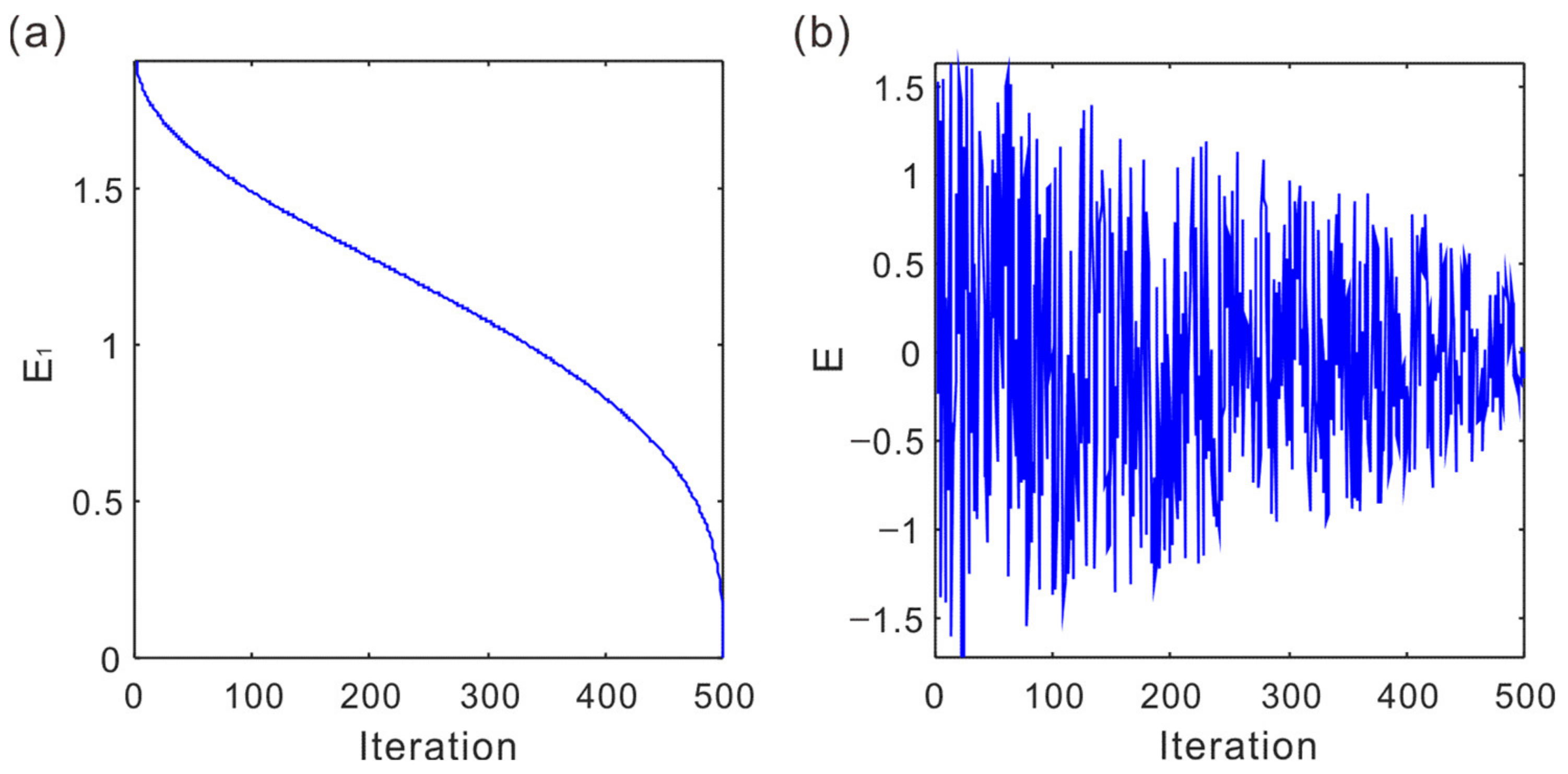
2.3. Nonlinear Escaping Energy Parameter
2.4. Random Opposition-Based Learning (ROBL)
3. The Proposed IHAOHHO Algorithm
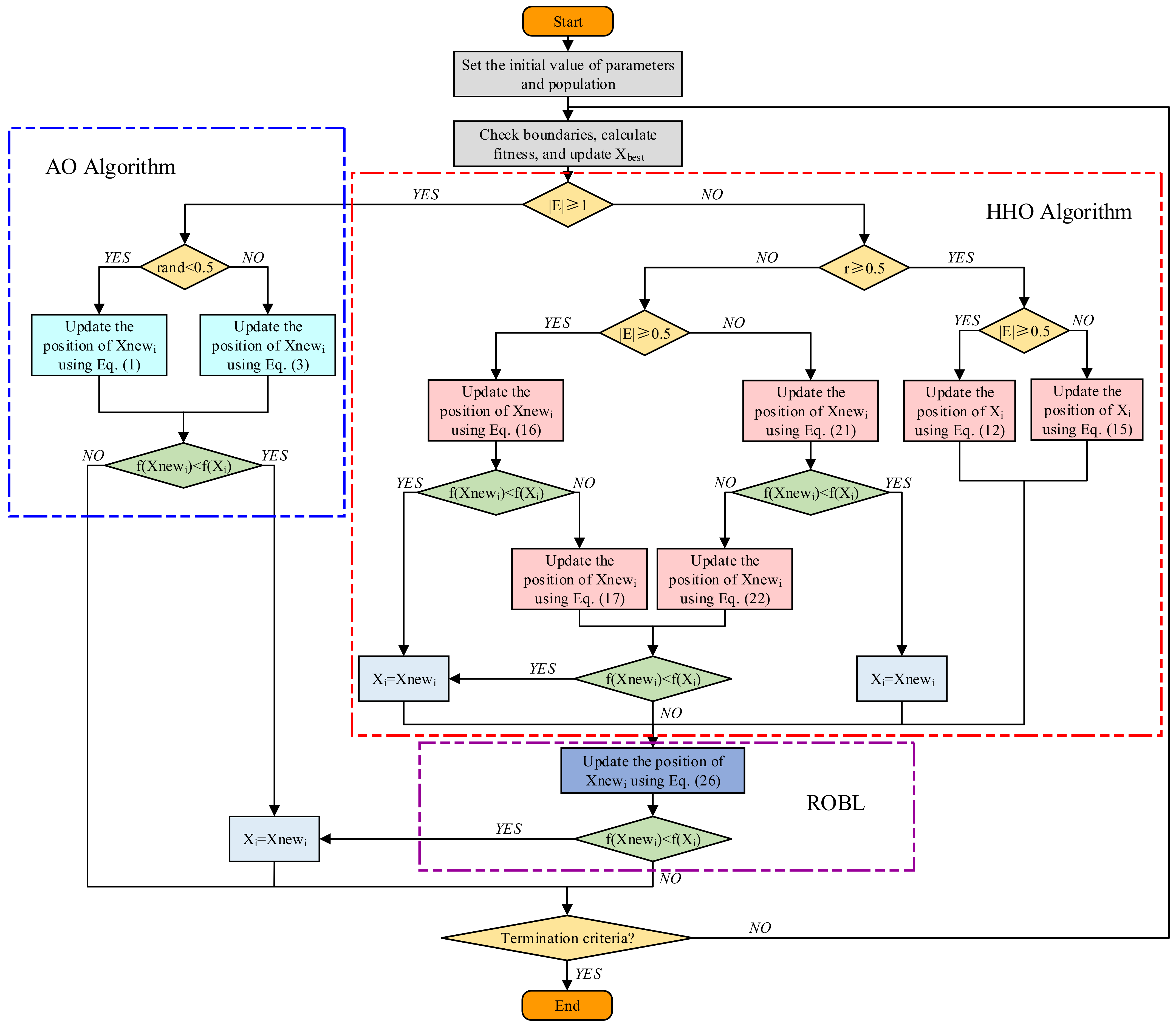
3.1. The Detail Design of IHAOHHO
| Algorithm 1 Pseudo-code of IHAOHHO. |
| 1: Set initial values of the population size N and the maximum number of iterations T 2: Initialize positions of the population X 3: While t < T 4: For i = 1 to N 5: Check if the position goes out of the search space boundary, and bring it back. 6: Calculate the fitness of Xi 7: Update Xbest 8: End for 9: Update x, y, QF, G1, G2, E1 10: For i = 1 to N 11: Update E using Equation (24) % Nonlinear escaping energy parameter 12: If |E| ≥ 1 % Exploration part of AO 13: If rand < 0.5 14: Update the position of Xnewi using Equation (1) 15: If f(Xnewi) < f(Xi) 16: Xi = Xnewi 17: End if 18: Else 19: Update the position of Xnewi using Equation (3) 20: If f(Xnewi) < f(Xi) 21: Xi = Xnewi 22: End if 23: End if 24: Else % Exploitation part of HHO 25: If r ≥ 0.5 and |E| ≥ 0.5 26: Update the position of Xi using Equation (12) 27: End if 28: If r ≥ 0.5 and |E| < 0.5 29: Update the position of Xi using Equation (15) 30: End if 31: If r < 0.5 and |E| ≥ 0.5 32: Update the position of Xnewi using Equation (16) 33: If f(Xnewi) < f(Xi) 34: Xi = Xnewi 35: Else 36: Update the position of Xnewi using Equation (17) 37: If f(Xnewi) < f(Xi) 38: Xi = Xnewi 39: End if 40: End if 41: End if 42: If r < 0.5 and |E| < 0.5 43: Update the position of Xnewi using Equation (21) 44: If f(Xnewi) < f(Xi) 45: Xi = Xnewi 46: Else 47: Update the position of Xnewi using Equation (22) 48: If f(Xnewi) < f(Xi) 49: Xi = Xnewi 50: End if 51: End if 52: End if 53: Update the position of Xnewi using Equation (26) % ROBL 54: If f(Xnewi) < f(Xi) 55: Xi = Xnewi 56: End if 57: End if 58: t = t + 1 59: End for 60: End while 61: Return Xbest |
3.2. Computational Complexity of IHAOHHO
4. Results and Discussion
4.1. Benchmark Function Experiments
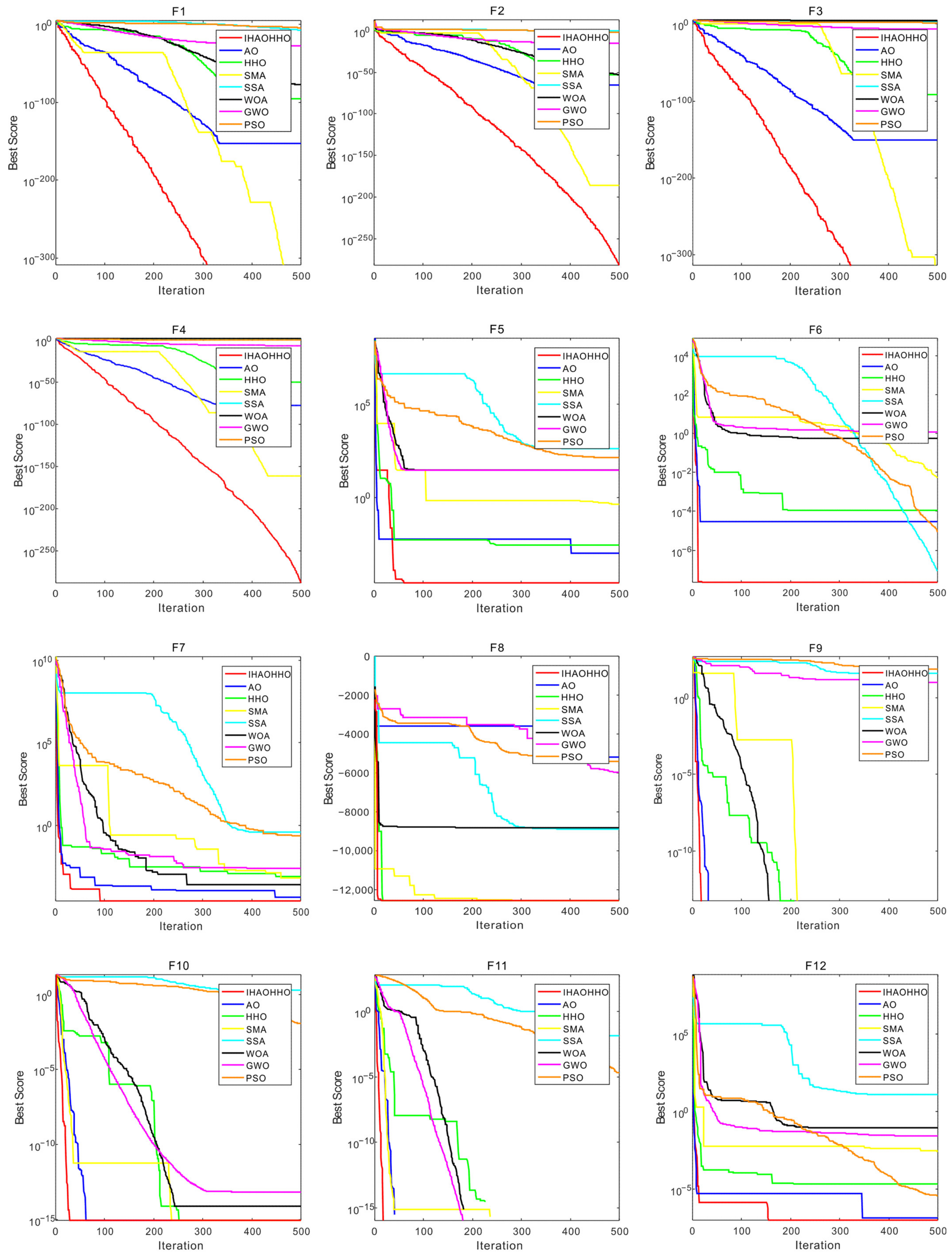
4.1.1. Evaluation of Exploitation Capability (Functions F1–F7)
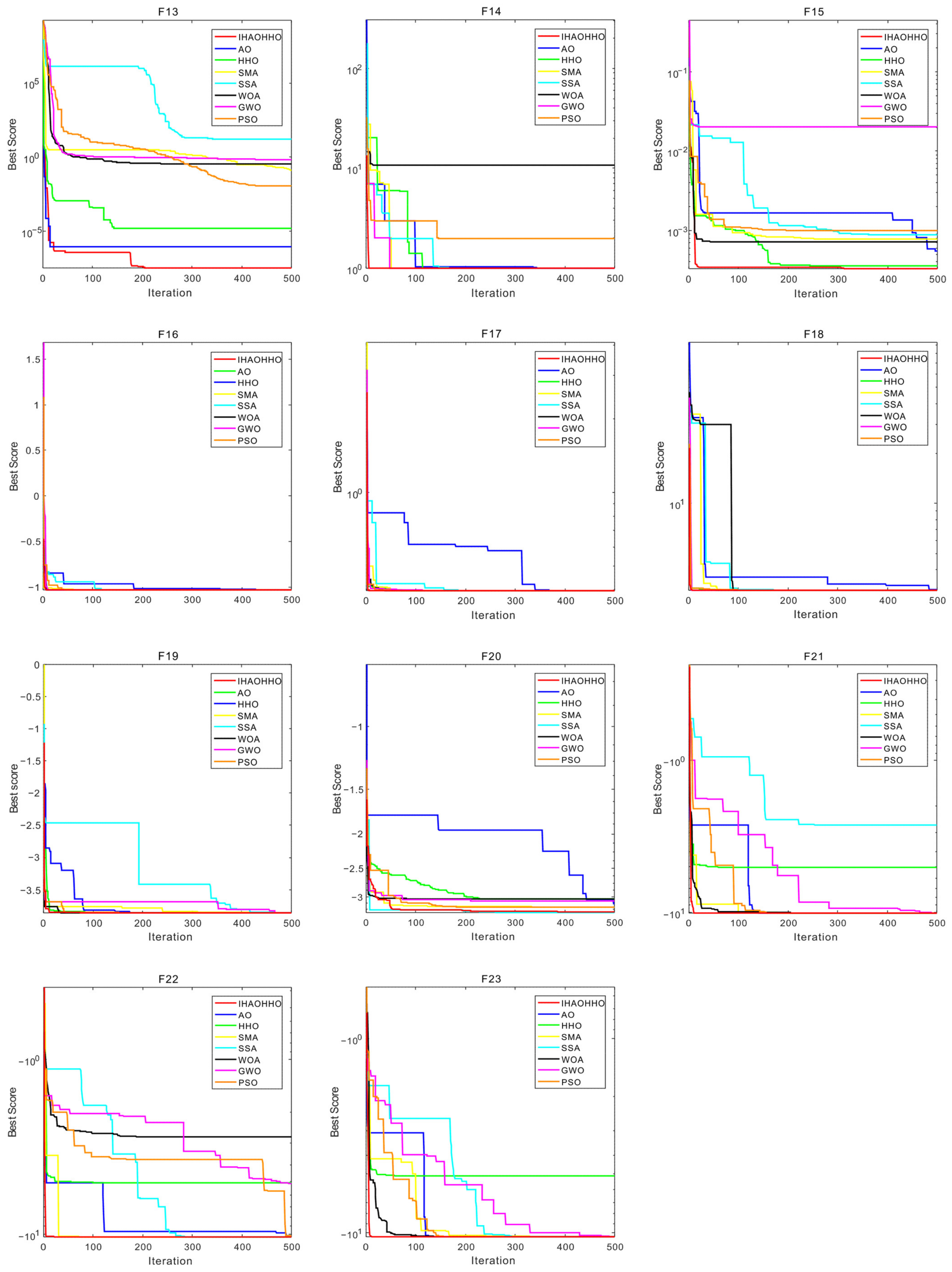
4.1.2. Evaluation of Exploration Capability (Functions F8–F23)
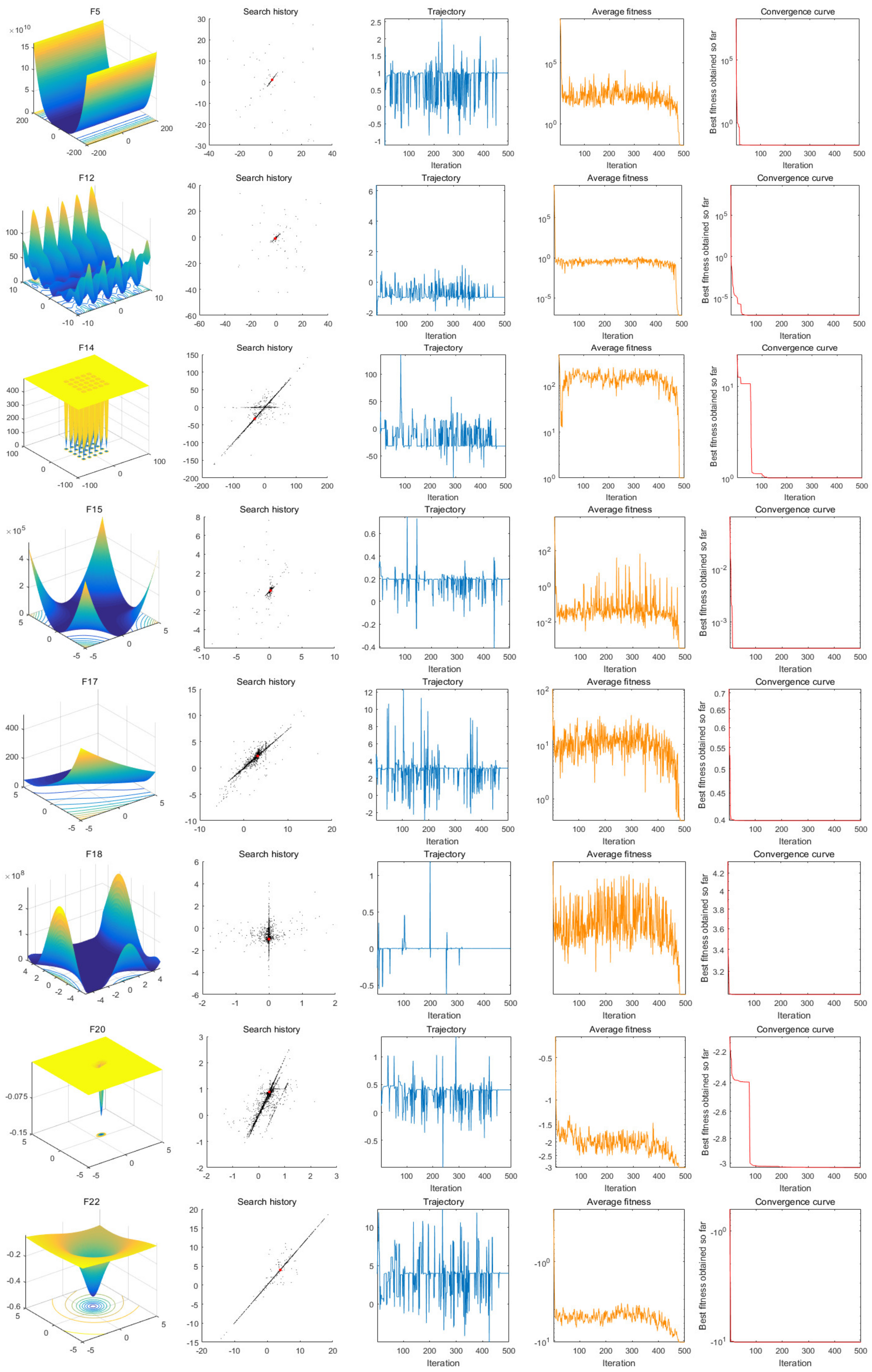
4.1.3. Analysis of Convergence Behavior
4.1.4. The Wilcoxon Test
4.1.5. Computation Time
4.2. Experiments on Industrial Engineering Design Problems
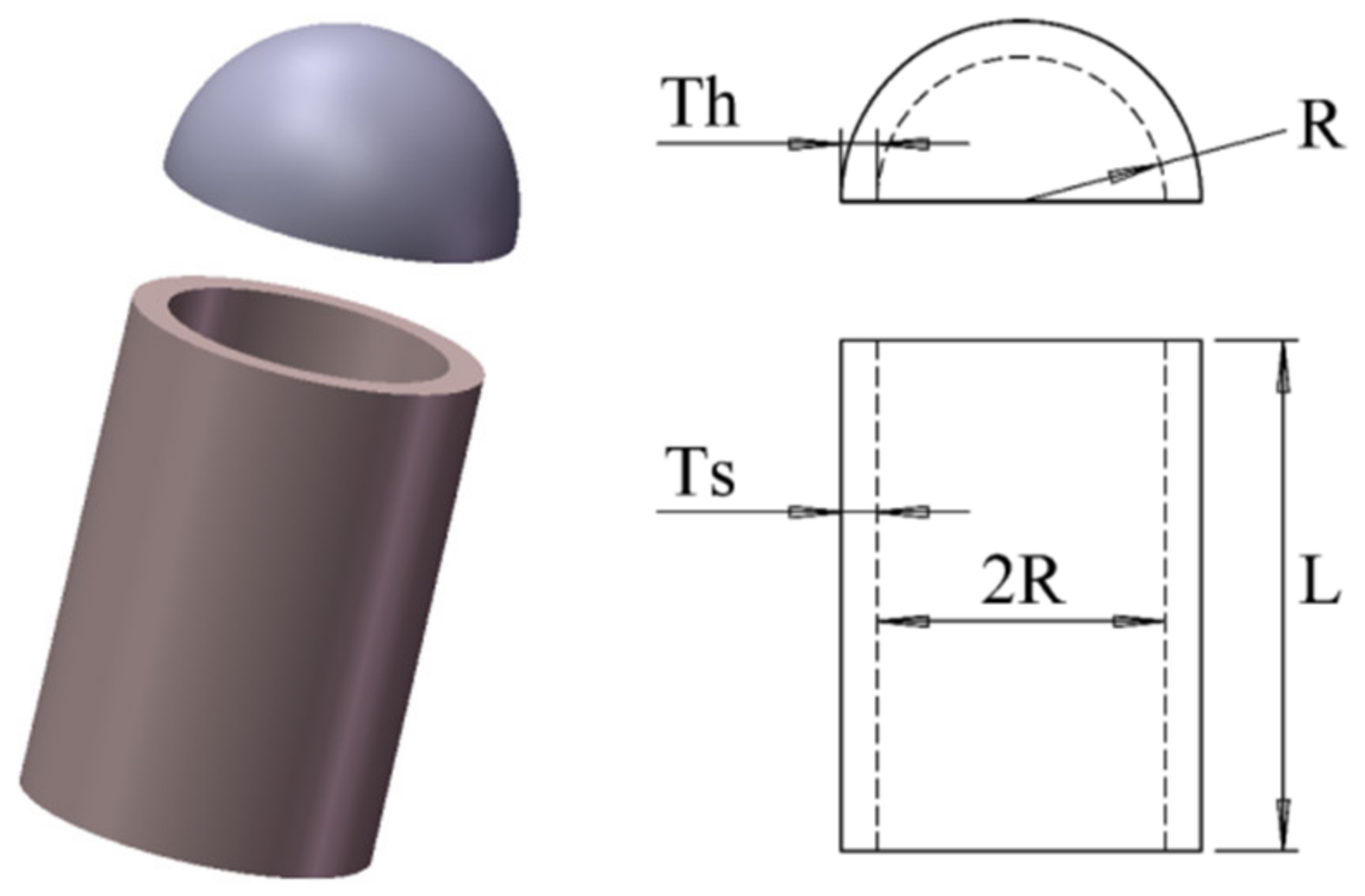
4.2.1. Pressure Vessel Design Problem
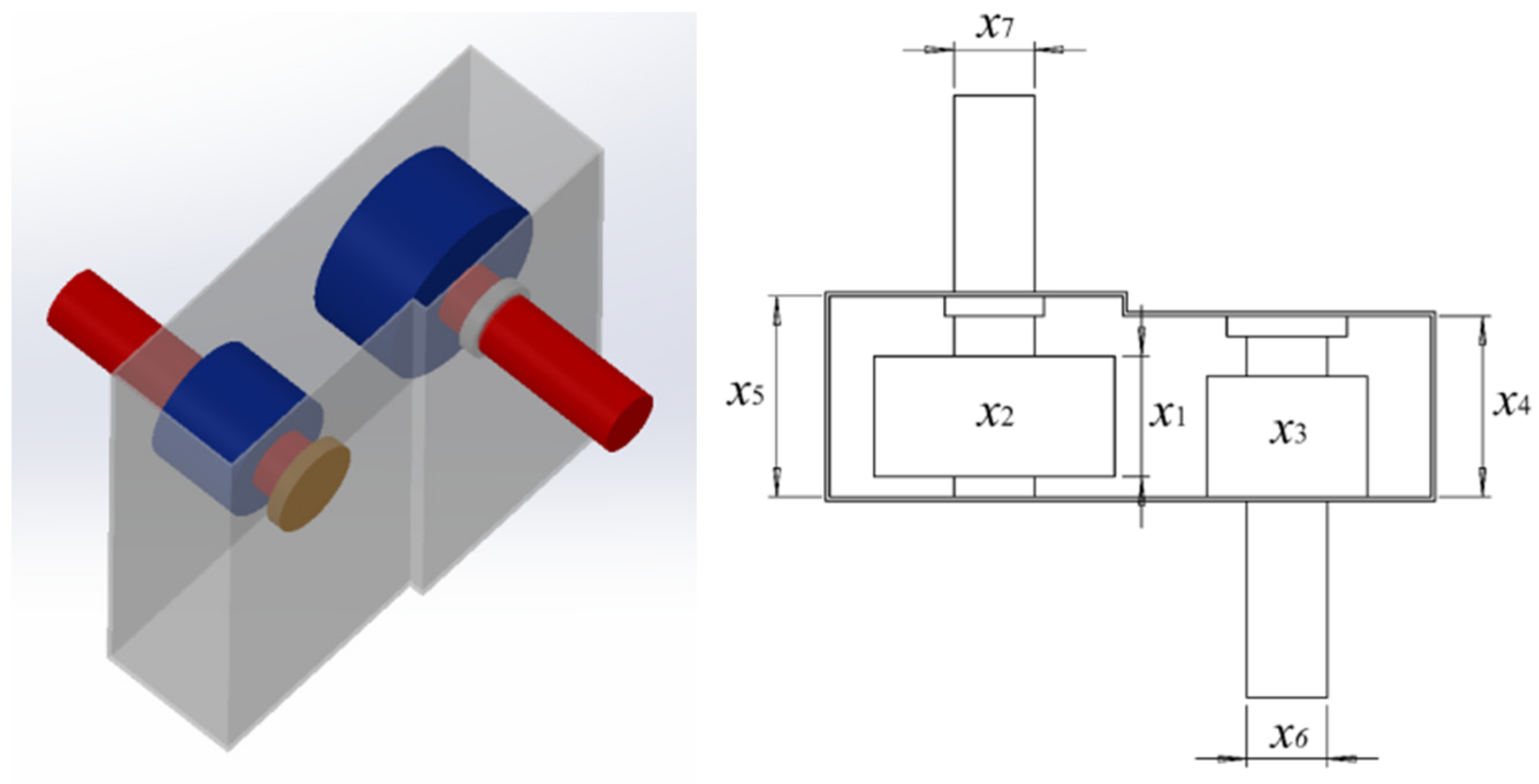
4.2.2. Speed Reducer Design Problem
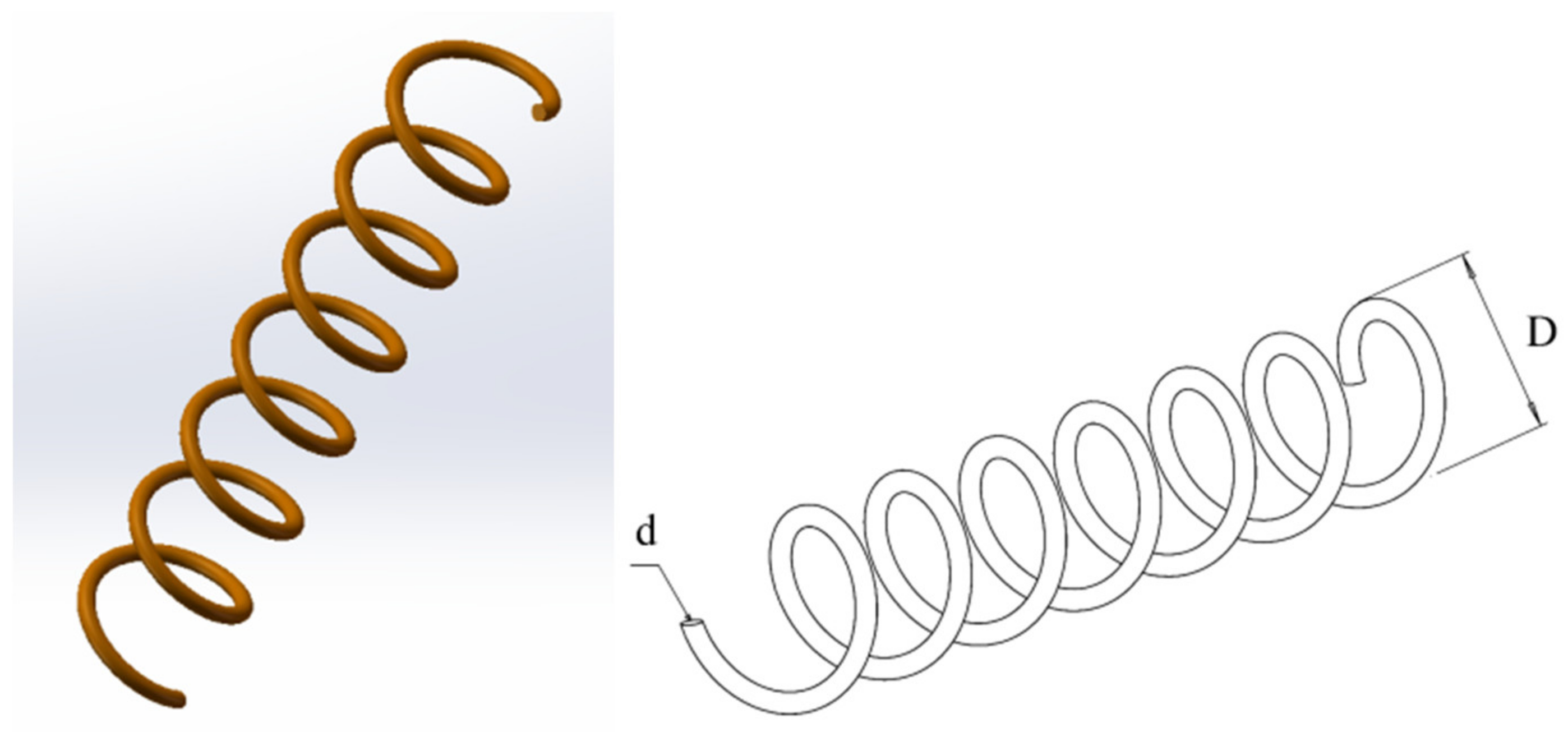
4.2.3. Tension/Compression Spring Design Problem
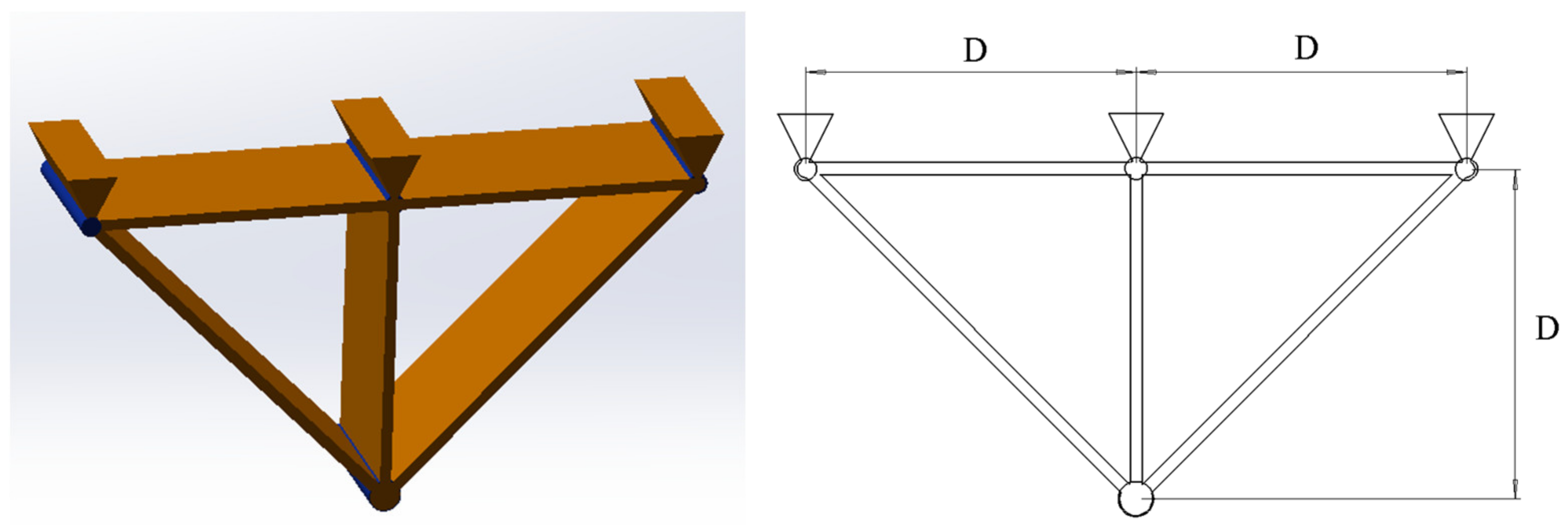
4.2.4. Three-Bar Truss Design Problem
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abualigah, L.; Diabat, A. Advances in sine cosine algorithm: A comprehensive survey. Artif. Intell. Rev. 2021, 54, 2567–2608. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A. A comprehensive survey of the Grasshopper optimization algorithm: Results, variants, and applications. Neural Comput. Appl. 2020, 32, 15533–15556. [Google Scholar] [CrossRef]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–72. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential evolution-a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Koza, J.R. Genetic Programming: On the Programming of Computers by Means of Natural Selection; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Rechenberg, I. Evolutionsstrategien. In Simulationsmethoden in der Medizin und Biologie; Springer: Berlin/Heidelberg, Germany, 1978; Volume 8, pp. 83–114. [Google Scholar]
- Simon, D. Biogeography-based optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Yao, X.; Liu, Y.; Lin, G. Evolutionary programming made faster. IEEE Trans. Evol. Comput. 1999, 3, 82–102. [Google Scholar] [CrossRef] [Green Version]
- Dasgupta, D.; Michalewicz, Z. Evolutionary Algorithms in Engineering Applications; DBLP: Trier, Germany, 1997. [Google Scholar]
- Kirkpatrick, S.; Gelatt, C.D.; Vecchi, M.P. Optimization by simmulated annealing. Science 1983, 220, 671–680. [Google Scholar] [CrossRef] [PubMed]
- Erol, O.K.; Eksin, I. A new optimization method: Big bang-big crunch. Adv. Eng. Softw. 2006, 37, 106–111. [Google Scholar] [CrossRef]
- Rashedi, E.; Nezamabadi-Pour, H.; Saryazdi, S. GSA: A Gravitational Search Algorithm. Inf. Sci. 2009, 179, 2232–2248. [Google Scholar] [CrossRef]
- Webster, B.; Bernhard, P.J. A local search optimization algorithm based on natural principles of gravitation. In Information & Knowledge Engineering, Proceedings of the 2003 International Conference on Information and Knowledge Engineering (IKE’03), Las Vegas, NV, USA, 23–26 June 2003; DBLP: Trier, Germany, 2003. [Google Scholar]
- Asef, F.; Majidnezhad, V.; Feizi-Derakhshi, M.R.; Parsa, S. Heat transfer relation-based optimization algorithm (HTOA). Soft Comput. 2021, 1–30. [Google Scholar] [CrossRef]
- Kaveh, A.; Talatahari, S. A novel heuristic optimization method: Charged system search. Acta Mech. 2010, 213, 267–289. [Google Scholar] [CrossRef]
- Alatas, B. ACROA: Artificial Chemical Reaction Optimization Algorithm for global optimization. Expert Syst. Appl. 2011, 38, 13170–13180. [Google Scholar] [CrossRef]
- Formato, R.A. Central force optimization: A new metaheuristic with applications in applied electromagnetics. Prog. Electromag. Res. 2007, 77, 425–491. [Google Scholar] [CrossRef] [Green Version]
- Kaveh, A.; Khayatazad, M. A new meta-heuristic method: Ray optimization. Comput. Struct. 2012, 112, 283–294. [Google Scholar] [CrossRef]
- Hatamlou, A. Black hole: A new heuristic optimization approach for data clustering. Inf. Sci. 2013, 222, 175–184. [Google Scholar] [CrossRef]
- Du, H.; Wu, X.; Zhuang, J. Small-world optimization algorithm for function optimization. In Advances in Natural Computation, Advances in Natural Computation, Second International Conference; ICNC: Xi’an, China, 2006. [Google Scholar]
- Shah-Hosseini, H. Principal components analysis by the galaxy-based search algorithm: A novel metaheuristic for continuous optimisation. Int. J. Comput. Sci. Eng. 2011, 6, 132–140. [Google Scholar] [CrossRef]
- Moghaddam, F.F.; Moghaddam, R.F.; Cheriet, M. Curved space optimization: A random search based on general relativity theory. arXiv 2012, arXiv:1208.2214. [Google Scholar]
- Mirjalili, S.; Mirjalili, S.M.; Hatamlou, A. Multi-Verse Optimizer: A nature-inspired algorithm for global optimization. Neural Comput. Appl. 2015, 27, 495–513. [Google Scholar] [CrossRef]
- Mirjalili, S. SCA: A Sine Cosine Algorithm for Solving Optimization Problems. Knowl.-Based Syst. 2016, 96. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Elaziz, M.A.; Gandomi, A.H. The Arithmetic Optimization Algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the 1995 IEEE International Conference on Neural Networks (ICNN ’93), Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995. [Google Scholar]
- Dorigo, M.; Birattari, M.; Stutzle, T. Ant colony optimization. IEEE Comput. Intell. 2006, 1, 28–39. [Google Scholar] [CrossRef]
- Mucherino, A.; Seref, O.; Seref, O.; Kundakcioglu, O.E.; Pardalos, P. Monkey search: A novel metaheuristic search for global optimization. Am. Inst. Phys. 2007, 953, 162–173. [Google Scholar] [CrossRef]
- Yang, X.S. Firefly algorithm, stochastic test functions and design optimization. Int. J. Bio-Inspired Comput. 2010, 2, 78–84. [Google Scholar] [CrossRef]
- Yang, X.S. A new metaheuristic bat-inspired algorithm. In Nature Inspired Cooperative Strategies for Optimization (NICSO); Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Gandomi, A.H.; Alavi, A.H. Krill Herd: A new bio-inspired optimization algorithm. Commun. Nonlinear Sci. Numer. Simul. 2012, 17, 4831–4845. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Gandomi, A.H.; Yang, X.S.; Alavi, A.H. Cuckoo search algorithm: A metaheuristic approach to solve structural optimization problems. Eng. Comput. 2013, 29, 17–35. [Google Scholar] [CrossRef]
- Pan, W.T. A new fruit fly optimization algorithm: Taking the financial distress model as an example. Knowl.-Based Syst. 2012, 26, 69–74. [Google Scholar] [CrossRef]
- Yang, S.; Jiang, J.; Yan, G. A dolphin partner optimization. In Proceedings of the 2009 WRI Global Congress on Intelligent Systems (GCIS 2009), Xiamen, China, 19–21 May 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar]
- Mirjalili, S. The Ant Lion optimizer. Adv. Eng. Softw. 2015, 83, 80–98. [Google Scholar] [CrossRef]
- Jia, H.; Peng, X.; Lang, C. Remora optimization algorithm. Expert Syst. Appl. 2021, 185, 115665. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp swarm algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Alsattar, H.A.; Zaidan, A.A.; Zaidan, B.B. Novel meta-heuristic bald eagle search optimisation algorithm. Artif. Intell. Rev. 2020, 53, 2237–2264. [Google Scholar] [CrossRef]
- Li, S.M.; Chen, H.L.; Wang, M.J.; Heidari, A.A.; Mirjalili, S. Slime mould algorithm: A new method for stochastic optimization. Future Gener. Comput. Syst. 2020, 111, 300–323. [Google Scholar] [CrossRef]
- Heidari, A.A.; Mirjalili, S.; Faris, H.; Aljarah, I.; Mafarja, M.; Chen, H.L. Harris Hawks optimization: Algorithm and applications. Future Gener. Comput. Syst. 2019, 97, 849–872. [Google Scholar] [CrossRef]
- Yousri, D.; Fathy, A.; Thanikanti, S.B. Recent methodology based Harris Hawks optimizer for designing load frequency control incorporated in multi-interconnected renewable energy plants. Sustain. Energy Grids Netw. 2020, 22, 100352. [Google Scholar] [CrossRef]
- Bui, D.T.; Moayedi, H.; Kalantar, B.; Osouli, A.; Rashid, A. A Novel Swarm Intelligence Technique Harris Hawks Optimization for Spatial Assessment of Landslide Susceptibility. Sensors 2019, 19, 3590. [Google Scholar] [CrossRef] [Green Version]
- Golilarz, N.A.; Gao, H.; Demirel, H. Satellite image de-noising with Harris Hawks meta heuristic optimization algorithm and improved adaptive generalized gaussian distribution threshold function. IEEE Access 2019, 7, 57459–57468. [Google Scholar] [CrossRef]
- Jia, H.; Peng, X.; Kang, L.; Li, Y.; Sun, K. Pulse coupled neural network based on Harris Hawks optimization algorithm for image segmentation. Multimed Tools Appl. 2020, 79, 28369–28392. [Google Scholar] [CrossRef]
- Jia, H.; Lang, C.; Oliva, D.; Song, W.; Peng, X. Dynamic Harris Hawks Optimization with Mutation Mechanism for Satellite Image Segmentation. Remote Sens. 2019, 11, 1421. [Google Scholar] [CrossRef] [Green Version]
- Yousri, D.; Mirjalili, S.; Machado, J.A.T.; Thanikantie, S.B.; Elbaksawi, O.; Fathy, A. Efficient fractional-order modified Harris Hawks optimizer for proton exchange membrane fuel cell modeling. Eng. Appl. Artif. Intell. 2021, 100, 104193. [Google Scholar] [CrossRef]
- Gupta, S.; Deep, K.; Heidari, A.A.; Moayedi, H.; Wang, M. Opposition-based Learning Harris Hawks Optimization with Advanced Transition Rules: Principles and Analysis. Expert Syst. Appl. 2020, 158, 113510. [Google Scholar] [CrossRef]
- Hussien, A.G.; Amin, M. A self-adaptive Harris Hawks optimization algorithm with opposition-based learning and chaotic local search strategy for global optimization and feature selection. Int. J. Mach. Learn. Cyber. 2021, 1–28. [Google Scholar] [CrossRef]
- Sihwail, R.; Omar, K.; Ariffin, K.; Tubishat, M. Improved Harris Hawks Optimization Using Elite Opposition-Based Learning and Novel Search Mechanism for Feature Selection. IEEE Access 2020, 8, 121127–121145. [Google Scholar] [CrossRef]
- Bao, X.; Jia, H.; Lang, C. A Novel Hybrid Harris Hawks Optimization for Color Image Multilevel Thresholding Segmentation. IEEE Access 2019, 7, 76529–76546. [Google Scholar] [CrossRef]
- Houssein, E.H.; Hosney, M.E.; Elhoseny, M.; Oliva, D.; Hassaballah, M. Hybrid Harris Hawks Optimization with Cuckoo Search for Drug Design and Discovery in Chemoinformatics. Sci. Rep. 2020, 10, 14439. [Google Scholar] [CrossRef] [PubMed]
- Kaveh, A.; Rahmani, P.; Eslamlou, A.D. An efficient hybrid approach based on Harris Hawks optimization and imperialist competitive algorithm for structural optimization. Eng. Comput. 2021, 4598. [Google Scholar] [CrossRef]
- Abualigah, L.; Yousri, D.; Elaziz, M.A.; Ewees, A.A.; Al-qaness, M.A.A.; Gandomi, A.H. Aquila Optimizer: A novel meta-heuristic optimization algorithm. Comput. Ind. Eng. 2021, 157, 107250. [Google Scholar] [CrossRef]
- Tang, A.D.; Han, T.; Xu, D.W.; Xie, L. Chaotic Elite Harris Hawk Optimization Algorithm. J. Comput. Appl. 2021, 1–10. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=JSJY2021011300H&v=5lc3RO%25mmd2BEUUC%25mmd2FhVq8jnE%25mmd2BxfkAnjCOOEL7xcSF5jPQfItuqOALm2aHD2u1aGLhSpw1 (accessed on 15 January 2021).
- Tizhoosh, H. Opposition-based learning: A new scheme for machine intelligence. In Control and Automation, Proceedings of the International Conference on Computational Intelligence for Modeling, Vienna, Austria, 28–30 November 2005; IEEE: Piscataway, NJ, USA, 2005. [Google Scholar]
- Rahnamayan, S.; Tizhoosh, H.R.; Salama, M.M.A. Opposition-based differential evolution. IEEE Trans. Evol. Comput. 2014, 12, 64–79. [Google Scholar] [CrossRef] [Green Version]
- Jia, Z.; Li, L.; Hui, S. Artificial Bee Colony Using Opposition-Based Learning. Adv. Intell. Syst. Comput. 2015, 329, 3–10. [Google Scholar]
- Elaziz, M.A.; Oliva, D.; Xiong, S. An improved Opposition-Based Sine Cosine Algorithm for global optimization. Expert Syst. Appl. 2017, 90, 484–500. [Google Scholar] [CrossRef]
- Ewees, A.A.; Elaziz, M.A.; Houssein, E.H. Improved Grasshopper Optimization Algorithm using Opposition-based Learning. Expert Syst. Appl. 2018, 112, 156–172. [Google Scholar] [CrossRef]
- Fan, C.; Zheng, N.; Zheng, J.; Xiao, L.; Liu, Y. Kinetic-molecular theory optimization algorithm using opposition-based learning and varying accelerated motion. Soft Comput. 2020, 24, 12709–12730. [Google Scholar] [CrossRef]
- Long, W.; Jiao, J.; Liang, X.; Cai, S.; Xu, M. A Random Opposition-Based Learning Grey Wolf Optimizer. IEEE Access 2019, 7, 113810–113825. [Google Scholar] [CrossRef]
- Molga, M.; Smutnicki, C. Test Functions for Optimization Needs. 2005. Available online: http://www.robertmarks.org/Classes/ENGR5358/Papers/functions.pdf (accessed on 1 January 2005).
- He, Q.; Wang, L. An effective co-evolutionary particle swarm optimization for constrained engineering design problems. Eng. Appl. Artif. Intell. 2007, 20, 89–99. [Google Scholar] [CrossRef]
- Mirjalili, S. Moth-flame optimization algorithm: A novel nature-inspired heuristic paradigm. Knowl.-Based Syst. 2015, 89, 228–249. [Google Scholar] [CrossRef]
- Geem, Z.W.; Kim, J.H.; Loganathan, G.V. A new heuristic optimization algorithm: Harmony search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Baykasoğlu, A.; Ozsoydan, F.B. Adaptive firefly algorithm with chaos for mechanical design optimization problems. Appl. Soft Comput. 2015, 36, 152–164. [Google Scholar] [CrossRef]
- Lu, S.; Kim, H.M. A regularized inexact penalty decomposition algorithm for multidisciplinary design optimization problems with complementarity constraints. J. Mech. Des. 2010, 132, 041005. [Google Scholar] [CrossRef] [Green Version]
- Saremi, S.; Mirjalili, S.; Lewis, A. Grasshopper optimisation algorithm: Theory and application. Adv. Eng. Softw. 2017, 105, 30–47. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Dim | Range | Fmin |
|---|---|---|---|
| 30 | (−100, 100) | 0 | |
| 30 | (−10, 10) | 0 | |
| 30 | (−100, 100) | 0 | |
| 30 | (−100, 100) | 0 | |
| 30 | (−30,30) | 0 | |
| 30 | (−100, 100) | 0 | |
| 30 | (−1.28, 1.28) | 0 |
| Function | Dim | Range | Fmin |
|---|---|---|---|
| 30 | (−500, 500) | −418.9829 × 30 | |
| 30 | (−5.12, 5.12) | 0 | |
| 30 | (−32, 32) | 0 | |
| 30 | (−600, 600) | 0 | |
| 30 | (−50, 50) | 0 | |
| 30 | (−50, 50) | 0 |
| Function | Dim | Range | Fmin |
| 2 | (−65, 65) | 1 | |
| 4 | (−5, 5) | 0.00030 | |
| 2 | (−5, 5) | −1.0316 | |
| 2 | (−5, 5) | 0.398 | |
| 2 | (−2, 2) | 3 | |
| 3 | (−1, 2) | −3.86 | |
| 6 | (0, 1) | −3.32 | |
| 4 | (0, 10) | −10.1532 | |
| 4 | (0, 10) | −10.4028 | |
| 4 | (0, 10) | −10.5363 |
| Algorithm | Parameters |
|---|---|
| AO | U = 0.00565; r1 = 10; ω = 0.005; α = 0.1; δ = 0.1; G1 ∈ [−1, 1]; G2 = [2, 0] |
| HHO | q ∈ [0, 1]; r ∈ [0, 1]; E0 ∈ [−1, 1]; E1 = [2, 0]; E ∈ [−2, 2]; |
| SMA | z = 0.03 |
| SSA | c1 = [1, 0]; c2 ∈ [0, 1]; c3 ∈ [0, 1] |
| WOA | a1 = [2, 0]; a2 = [−1, −2]; b = 1 |
| GWO | a = [2, 0] |
| PSO | c1 = 2; c2 = 2; vmax = 6 |
| F | IHAOHHO | AO | HHO | SMA | SSA | WOA | GWO | PSO | |
|---|---|---|---|---|---|---|---|---|---|
| F1 | Avg | 0.0000 × 100 | 2.5120 × 10−128 | 1.7359 × 10−98 | 6.7559 × 10−287 | 2.0918 × 10−7 | 7.0172 × 10−75 | 2.7553 × 10−27 | 1.7920 × 10−4 |
| Std | 0.0000 × 100 | 1.3759 × 10−127 | 3.8748 × 10−98 | 0.0000 × 100 | 2.5521 × 10−7 | 2.0985 × 10−74 | 7.4745 × 10−27 | 2.1473 × 10−4 | |
| F2 | Avg | 3.1773 × 10−283 | 3.0714 × 10−51 | 3.6162 × 10−49 | 1.7722 × 10−136 | 2.1400 × 100 | 2.1103 × 10−49 | 7.2224 × 10−17 | 2.2676 × 10−1 |
| Std | 0.0000 × 100 | 1.6823 × 10−50 | 1.9747 × 10−48 | 9.7069 × 10−136 | 1.5737 × 100 | 1.1221 × 10−48 | 4.3158 × 10−17 | 2.0215 × 10−2 | |
| F3 | Avg | 0.0000 × 100 | 2.3884 × 10−101 | 7.9368 × 10−70 | 2.7958 × 10−305 | 1.5707 × 103 | 4.8346 × 104 | 1.9688 × 10−5 | 8.7992 × 101 |
| Std | 0.0000 × 100 | 9.262 × 10−101 | 4.3417 × 10−69 | 0.0000 × 100 | 1.0057 × 103 | 1.5295 × 104 | 8.5080 × 10−5 | 3.7192 × 101 | |
| F4 | Avg | 1.1105 × 10−281 | 1.0656 × 10−53 | 1.2768 × 10−49 | 1.0217 × 10−160 | 1.1623 × 101 | 5.4222 × 101 | 9.2533 × 10−7 | 1.0783 × 100 |
| Std | 0.0000 × 100 | 5.8309 × 10−53 | 4.4293 × 10−49 | 5.5961 × 10−160 | 3.3373 × 100 | 2.9852 × 101 | 9.1688 × 10−7 | 2.1854 × 10−1 | |
| F5 | Avg | 2.8203 × 10−3 | 6.4303 × 10−3 | 1.1390 × 10−2 | 9.4019 × 100 | 3.1709 × 102 | 2.7969 × 101 | 2.7412 × 101 | 1.0424 × 102 |
| Std | 4.4716 × 10−3 | 9.1289 × 10−3 | 1.2058 × 10−2 | 1.2466 × 101 | 8.0601 × 102 | 4.5551 × 10−1 | 8.8086 × 10−1 | 9.9130 × 101 | |
| F6 | Avg | 4.2411 × 10−6 | 1.1861 × 10−4 | 1.1430 × 10−4 | 5.2584 × 10−3 | 3.5188 × 10−7 | 3.6078 × 10−1 | 8.0826 × 10−1 | 1.1828 × 10−4 |
| Std | 6.2092 × 10−6 | 2.1625 × 10−4 | 1.4084 × 10−4 | 3.1160 × 10−3 | 7.3563 × 10−7 | 1.8848 × 10−1 | 3.3042 × 10−1 | 1.3013 × 10−4 | |
| F7 | Avg | 7.1381 × 10−5 | 9.2969 × 10−5 | 1.4408 × 10−4 | 2.2317 × 10−4 | 1.7310 × 10−1 | 2.6756 × 10−3 | 2.2547 × 10−3 | 1.8040 × 10−1 |
| Std | 7.6852 × 10−5 | 1.1466 × 10−4 | 1.5482 × 10−4 | 1.6750 × 10−4 | 7.8997 × 10−2 | 2.3949 × 10−3 | 1.1317 × 10−3 | 7.5627 × 10−2 | |
| F8 | Avg | −12,447.8654 | −7073.9882 | −12,568.7811 | −12,568.9426 | −7591.3246 | −10,430.3986 | −6049.3246 | −5317.3115 |
| Std | 4.5359 × 102 | 3.5511 × 103 | 1.3999 × 100 | 4.0261 × 10−1 | 6.9106 × 102 | 1.9097 × 103 | 8.0214 × 102 | 1.5005 × 103 | |
| F9 | Avg | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 5.5253 × 101 | 1.8948 × 10−15 | 4.8419 × 100 | 5.6659 × 101 |
| Std | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 1.9037 × 101 | 1.0378 × 10−14 | 6.2042 × 100 | 1.5111 × 101 | |
| F10 | Avg | 8.8818 × 10−16 | 8.8818 × 10−16 | 8.8818 × 10−16 | 8.8818 × 10−16 | 2.7561 × 100 | 3.9672 × 10−15 | 1.0356 × 10−13 | 2.0903 × 10−1 |
| Std | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 1.9773 × 100 | 2.4210 × 10−15 | 2.1323 × 10−14 | 4.4871 × 10−1 | |
| F11 | Avg | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 1.7030 × 10−2 | 5.9385 × 10−3 | 2.5384 × 10−3 | 4.9459 × 10−3 |
| Std | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 0.0000 × 100 | 1.9430 × 10−2 | 3.2527 × 10−2 | 8.7348 × 10−3 | 9.4682 × 10−3 | |
| F12 | Avg | 5.3164 × 10−7 | 4.6513 × 10−6 | 9.2636 × 10−6 | 5.0331 × 10−3 | 7.0564 × 100 | 2.5778 × 10−2 | 3.7730 × 10−2 | 6.9126 × 10−3 |
| Std | 9.6698 × 10−7 | 8.9371 × 10−6 | 1.2911 × 10−5 | 6.3463 × 10−3 | 3.0595 × 100 | 2.0942 × 10−2 | 1.8369 × 10−2 | 2.6301 × 10−2 | |
| F13 | Avg | 1.1694 × 10−5 | 3.3938 × 10−5 | 1.2604 × 10−4 | 7.3800 × 10−3 | 1.7887 × 101 | 5.8549 × 10−1 | 6.1135 × 10−1 | 4.4120 × 10−3 |
| Std | 1.7961 × 10−5 | 3.2363 × 10−5 | 1.5375 × 10−4 | 8.9329 × 10−3 | 1.5307 × 101 | 2.9719 × 10−1 | 1.7136 × 10−1 | 6.6275 × 10−3 | |
| F14 | Avg | 1.7919 × 100 | 1.5940 × 100 | 1.1635 × 100 | 9.9800 × 10−1 | 1.1637 × 100 | 5.0748 × 100 | 5.2681 × 100 | 3.5906 × 100 |
| Std | 9.1746 × 10−1 | 2.1763 × 100 | 4.5784 × 10−1 | 1.1156 × 10−12 | 3.7678 × 10−1 | 4.4603 × 100 | 4.6022 × 100 | 2.904 × 100 | |
| F15 | Avg | 3.5291 × 10−4 | 5.5590 × 10−4 | 4.0350 × 10−4 | 5.1576 × 10−4 | 2.8218 × 10−3 | 6.6118 × 10−4 | 6.3719 × 10−3 | 9.3864 × 10−4 |
| Std | 4.8766 × 10−5 | 1.1640 × 10−4 | 2.3353 × 10−4 | 3.0066 × 10−4 | 5.9580 × 10−3 | 7.1226 × 10−4 | 1.2424 × 10−2 | 2.6081 × 10−4 | |
| F16 | Avg | −1.0316 × 100 | −1.0311 × 100 | −1.0316 × 100 | −1.0316 × 100 | −1.0316 × 100 | −1.0316 × 100 | −1.0316 × 100 | −1.0316 × 100 |
| Std | 1.0379 × 10−10 | 3.7614 × 10−4 | 2.5745 × 10−9 | 4.3934 × 10−10 | 2.0489 × 10−14 | 6.1164 × 10−10 | 1.4772 × 10−8 | 6.4539 × 10−16 | |
| F17 | Avg | 3.9789 × 10−1 | 3.9812 × 10−1 | 3.9790 × 10−1 | 3.9789 × 10−1 | 3.9789 × 10−1 | 3.9789 × 10−1 | 3.9789 × 10−1 | 3.9789 × 10−1 |
| Std | 5.4022 × 10−7 | 2.2378 × 10−4 | 2.4237 × 10−5 | 2.4814 × 10−8 | 1.4663 × 10−14 | 8.5493 × 10−6 | 8.9987 × 10−7 | 0.0000 × 100 | |
| F18 | Avg | 3.0000 × 100 | 3.0439 × 100 | 3.0000 × 100 | 3.0000 × 100 | 3.0000 × 100 | 3.0000 × 100 | 3.0000 × 100 | 3.0000 × 100 |
| Std | 2.714 × 10−7 | 6.4693 × 10−2 | 1.6198 × 10−7 | 4.7705 × 10−10 | 9.5042 × 10−14 | 2.6269 × 10−4 | 4.7607 × 10−5 | 1.639 × 10−15 | |
| F19 | Avg | −3.8628 × 100 | −3.8539 × 100 | −3.8616 × 100 | −3.8628 × 100 | −3.8628 × 100 | −3.8597 × 100 | −3.8593 × 100 | −3.8628 × 100 |
| Std | 1.8351 × 10−4 | 6.0669 × 10−3 | 1.7013 × 10−3 | 3.0254 × 10−7 | 8.1972 × 10−13 | 3.1652 × 10−3 | 4.2427 × 10−3 | 2.6823 × 10−15 | |
| F20 | Avg | −3.1298 × 100 | −3.1572 × 100 | −3.0533 × 100 | −3.2425 × 100 | −3.2215 × 100 | −3.2391 × 100 | −3.2442 × 100 | −3.2665 × 100 |
| Std | 1.1264 × 10−1 | 1.0448 × 10−1 | 1.1671 × 10−1 | 5.7177 × 10−2 | 5.1720 × 10−2 | 1.3596 × 10−1 | 9.0427 × 10−2 | 6.0328 × 10−2 | |
| F21 | Avg | −1.0152 × 101 | −1.0142 × 101 | −5.5370 × 100 | −1.0152 × 101 | −7.3774 × 100 | −9.0891 × 100 | −9.1419 × 100 | −6.7868 × 100 |
| Std | 5.6352 × 10−4 | 1.8288 × 10−2 | 1.484 × 100 | 2.2592 × 10−3 | 2.9079 × 100 | 2.0545 × 100 | 2.3491 × 100 | 3.2622 × 100 | |
| F22 | Avg | −1.0402 × 101 | −1.0388 × 101 | −5.2528 × 100 | −1.0402 × 101 | −8.1232 × 100 | −7.5395 × 100 | −1.0401 × 101 | −8.1542 × 100 |
| Std | 6.3272 × 10−4 | 2.4782 × 10−2 | 9.3628 × 10−1 | 7.5981 × 10−4 | 3.3371 × 100 | 3.1570 × 100 | 8.9128 × 10−4 | 3.2898 × 100 | |
| F23 | Avg | −1.0535 × 101 | −1.0525 × 101 | −5.2858 × 100 | −1.0535 × 101 | −7.6861 × 100 | −6.6213 × 100 | −1.0535 × 101 | −1.0087 × 101 |
| Std | 9.8617 × 10−4 | 6.9516 × 10−3 | 8.8012 × 10−1 | 1.3006 × 10−3 | 3.6004 × 100 | 3.0127 × 100 | 9.0143 × 10−4 | 1.7472 × 100 |
| F | IHAOHHO vs. AO | IHAOHHO vs. HHO | IHAOHHO vs. SMA | IHAOHHO vs. SSA | IHAOHHO vs. WOA | IHAOHHO vs. GWO | IHAOHHO vs. PSO |
|---|---|---|---|---|---|---|---|
| F1 | 6.1035 × 10−5 | 6.1035 × 10−5 | N/A | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F2 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F3 | 6.1035 × 10−5 | 6.1035 × 10−5 | N/A | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F4 | 6.1035 × 10−5 | 6.1035 × 10−5 | 1.2207 × 10−4 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F5 | 6.7877 × 10−1 | 6.3867 × 10−1 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F6 | 1.5076 × 10−2 | 8.5449 × 10−4 | 6.1035 × 10−5 | 8.5449 × 10−4 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F7 | 8.0396 × 10−1 | 4.2725 × 10−3 | 3.0518 × 10−4 | 6.1035 × 10−5 | 1.2207 × 10−4 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F8 | 1.0699 × 10−3 | 5.5359 × 10−3 | 6.7139 × 10−3 | 8.5449 × 10−4 | 7.2998 × 10−2 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F9 | N/A | N/A | N/A | 6.1035 × 10−5 | N/A | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F10 | N/A | N/A | N/A | 6.1035 × 10−5 | 4.8828 × 10−4 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F11 | N/A | N/A | N/A | 6.1035 × 10−5 | N/A | 6.2500 × 10−2 | 6.1035 × 10−5 |
| F12 | 9.7797 × 10−1 | 2.7686 × 10−1 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 5.2448 × 10−1 |
| F13 | 8.9038 × 10−1 | 3.5339 × 10−2 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 6.1035 × 10−5 | 2.1545 × 10−2 |
| F14 | 3.5339 × 10−2 | 3.8940 × 10−2 | 1.2207 × 10−4 | 4.7913 × 10−2 | 6.1035 × 10−4 | 1.0699 × 10−1 | 2.1545 × 10−2 |
| F15 | 3.3569 × 10−3 | 7.1973 × 10−1 | 4.7913 × 10−2 | 6.1035 × 10−5 | 1.1597 × 10−3 | 2.1545 × 10−2 | 6.1035 × 10−5 |
| F16 | 6.1035 × 10−5 | 3.0151 × 10−2 | 8.5449 × 10−4 | 4.0283 × 10−3 | 4.2725 × 10−3 | 6.1035 × 10−5 | 1.2207 × 10−4 |
| F17 | 6.1035 × 10−5 | 3.0280 × 10−1 | 1.0254 × 10−2 | 6.1035 × 10−5 | 6.7139 × 10−3 | 2.5574 × 10−2 | 6.1035 × 10−5 |
| F18 | 6.1035 × 10−5 | 8.3618 × 10−3 | 8.3618 × 10−3 | 3.0518 × 10−4 | 1.2207 × 10−4 | 6.1035 × 10−5 | 6.1035 × 10−5 |
| F19 | N/A | N/A | N/A | N/A | N/A | N/A | 6.1035 × 10−5 |
| F20 | 7.2998 × 10−2 | 1.8762 × 10−1 | 7.2998 × 10−2 | 1.0699 × 10−2 | 2.7686 × 10−1 | 1.0254 × 10−2 | 3.3569 × 10−3 |
| F21 | 1.8762 × 10−1 | 6.1035 × 10−5 | 4.8871 × 10−1 | 4.2120 × 10−1 | 8.5449 × 10−4 | 5.9949 × 10−3 | 2.5574 × 10−2 |
| F22 | 4.7913 × 10−2 | 6.1035 × 10−5 | 1.8066 × 10−2 | 8.0396 × 10−1 | 1.2207 × 10−4 | 2.0776 × 10−1 | 8.3618 × 10−3 |
| F23 | 6.1035 × 10−5 | 6.1035 × 10−5 | 5.5359 × 10−2 | 8.3252 × 10−2 | 6.1035 × 10−5 | 8.3252 × 10−2 | 8.3252 × 10−2 |
| F | IHAOHHO | AO | HHO | SMA | SSA | WOA | GWO | PSO |
|---|---|---|---|---|---|---|---|---|
| F1 | 2.8539 × 10−1 | 2.3253 × 10−1 | 1.3713 × 10−1 | 8.8997 × 10−1 | 8.5420 × 10−2 | 7.5875 × 10−2 | 1.1491 × 10−1 | 6.5132 × 10−2 |
| F2 | 2.8946 × 10−1 | 2.5214 × 10−1 | 1.4672 × 10−1 | 9.1203 × 10−1 | 1.0346 × 10−1 | 1.1982 × 10−1 | 1.2761 × 10−1 | 7.3814 × 10−2 |
| F3 | 1.6030 × 100 | 9.2890 × 10−1 | 9.3324 × 10−1 | 1.2673 × 100 | 4.6382 × 10−1 | 3.9400 × 10−1 | 4.2700 × 10−1 | 3.9204 × 10−1 |
| F4 | 2.8070 × 10−1 | 1.9787 × 10−1 | 1.5712 × 10−1 | 9.5399 × 10−1 | 8.2341 × 10−2 | 7.3767 × 10−2 | 1.1442 × 10−1 | 6.4915 × 10−2 |
| F5 | 3.3725 × 10−1 | 2.2214 × 10−1 | 2.2123 × 10−1 | 1.0204 × 100 | 9.8470 × 10−2 | 8.7778 × 10−2 | 1.2667 × 10−1 | 7.8503 × 10−2 |
| F6 | 2.7707 × 10−1 | 2.0399 × 10−1 | 1.7800 × 10−1 | 9.0977 × 10−1 | 8.2725 × 10−2 | 7.4251 × 10−2 | 1.1248 × 10−1 | 6.5708 × 10−2 |
| F7 | 5.0109 × 10−1 | 3.0078 × 10−1 | 2.8662 × 10−1 | 9.5443 × 10−1 | 1.3880 × 10−1 | 1.2862 × 10−1 | 1.6701 × 10−1 | 1.1976 × 10−1 |
| F8 | 3.9395 × 10−1 | 2.3581 × 10−1 | 2.3276 × 10−1 | 9.7695 × 10−1 | 1.0531 × 10−1 | 9.7443 × 10−2 | 1.3674 × 10−1 | 9.1720 × 10−2 |
| F9 | 3.2379 × 10−1 | 1.9907 × 10−1 | 1.9594 × 10−1 | 9.5132 × 10−1 | 9.5204 × 10−2 | 7.9254 × 10−2 | 1.1801 × 10−1 | 7.4441 × 10−2 |
| F10 | 3.5602 × 10−1 | 2.3037 × 10−1 | 2.3125 × 10−1 | 9.4870 × 10−1 | 1.0399 × 10−1 | 9.0064 × 10−2 | 1.2725 × 10−1 | 8.3986 × 10−2 |
| F11 | 4.0659 × 10−1 | 2.4303 × 10−1 | 2.4198 × 10−1 | 9.3026 × 10−1 | 1.1382 × 10−1 | 1.0089 × 10−1 | 1.3566 × 10−1 | 9.2499 × 10−2 |
| F12 | 1.0131 × 100 | 6.0006 × 10−1 | 6.9400 × 10−1 | 1.1939 × 100 | 2.6401 × 10−1 | 2.5229 × 10−1 | 3.4237 × 10−1 | 2.4517 × 10−1 |
| F13 | 1.0300 × 100 | 5.6112 × 10−1 | 6.1205 × 10−1 | 1.1549 × 100 | 2.7393 × 10−1 | 2.7208 × 10−1 | 3.3915 × 10−1 | 2.4746 × 10−1 |
| F14 | 2.3159 × 100 | 1.2173 × 100 | 1.5168 × 100 | 8.9676 × 10−1 | 5.9818 × 10−1 | 6.0722 × 10−1 | 5.9328 × 10−1 | 5.5450 × 10−1 |
| F15 | 2.6135 × 10−1 | 1.7086 × 10−1 | 1.7031 × 10−1 | 3.4136 × 10−1 | 9.9034 × 10−2 | 7.5482 × 10−2 | 6.4104 × 10−2 | 4.2546 × 10−2 |
| F16 | 2.0719 × 10−1 | 1.4146 × 10−1 | 1.3859 × 10−1 | 2.7170 × 10−1 | 5.9081 × 10−2 | 4.9666 × 10−2 | 6.0033 × 10−2 | 4.1193 × 10−2 |
| F17 | 1.8138 × 10−1 | 1.3529 × 10−1 | 1.5833 × 10−1 | 2.7311 × 10−1 | 5.2979 × 10−2 | 4.1321 × 10−2 | 4.1556 × 10−2 | 2.3066 × 10−2 |
| F18 | 1.8108 × 10−1 | 1.3183 × 10−1 | 1.2693 × 10−1 | 2.7041 × 10−1 | 5.4471 × 10−2 | 4.0487 × 10−2 | 4.1752 × 10−2 | 2.2830 × 10−2 |
| F19 | 3.5119 × 10−1 | 2.4635 × 10−1 | 2.4016 × 10−1 | 3.4125 × 10−1 | 9.8544 × 10−2 | 8.5903 × 10−2 | 9.2049 × 10−2 | 7.0253 × 10−2 |
| F20 | 3.7106 × 10−1 | 2.2549 × 10−1 | 2.4656 × 10−1 | 4.0519 × 10−1 | 1.0270 × 10−1 | 9.0294 × 10−2 | 9.8020 × 10−2 | 7.2095 × 10−2 |
| F21 | 5.8451 × 10−1 | 3.2169 × 10−1 | 3.6385 × 10−1 | 4.1713 × 10−1 | 1.4920 × 10−1 | 1.3664 × 10−1 | 1.3885 × 10−1 | 1.2170 × 10−1 |
| F22 | 7.2861 × 10−1 | 3.9414 × 10−1 | 4.3943 × 10−1 | 4.9071 × 10−1 | 1.8789 × 10−1 | 1.7154 × 10−1 | 1.7638 × 10−1 | 1.5215 × 10−1 |
| F23 | 9.4549 × 10−1 | 4.9412 × 10−1 | 5.7464 × 10−1 | 4.9527 × 10−1 | 2.3551 × 10−1 | 2.7717 × 10−1 | 2.2549 × 10−1 | 2.0513 × 10−1 |
| Algorithm | Optimum Variables | Optimum Cost | |||
|---|---|---|---|---|---|
| Ts | Th | R | L | ||
| IHAOHHO | 0.8363559 | 0.4127868 | 45.08462 | 142.9202 | 5932.3392 |
| AO [55] | 1.0540 | 0.182806 | 59.6219 | 38.8050 | 5949.2258 |
| HHO [42] | 0.81758383 | 0.4072927 | 42.09174576 | 176.7196352 | 6000.46259 |
| SMA [41] | 0.7931 | 0.3932 | 40.6711 | 196.2178 | 5994.1857 |
| WOA [38] | 0.8125 | 0.4375 | 42.0982699 | 176.638998 | 6059.7410 |
| GWO [32] | 0.8125 | 0.4345 | 42.0892 | 176.7587 | 6051.5639 |
| MVO [23] | 0.8125 | 0.4375 | 42.090738 | 176.73869 | 6060.8066 |
| GA [3] | 0.8125 | 0.4375 | 42.097398 | 176.65405 | 6059.94634 |
| ES [6] | 0.8125 | 0.4375 | 42.098087 | 176.640518 | 6059.74560 |
| CPSO [65] | 0.8125 | 0.4375 | 42.091266 | 176.7465 | 6061.0777 |
| Algorithm | Optimum Variables | Optimum Weight | ||||||
|---|---|---|---|---|---|---|---|---|
| x1 | x2 | x3 | x4 | x5 | x6 | x7 | ||
| IHAOHHO | 3.49924 | 0.7 | 17 | 7.3 | 7.8191 | 3.35006 | 5.28531 | 2996.0935 |
| AO [55] | 3.5021 | 0.7 | 17 | 7.3099 | 7.7476 | 3.3641 | 5.2994 | 3007.7328 |
| PSO [26] | 3.5001 | 0.7 | 17.0002 | 7.5177 | 7.7832 | 3.3508 | 5.2867 | 3145.922 |
| AOA [25] | 3.50384 | 0.7 | 17 | 7.3 | 7.72933 | 3.35649 | 5.2867 | 2997.9157 |
| MFO [66] | 3.49745 | 0.7 | 17 | 7.82775 | 7.71245 | 3.35178 | 5.28635 | 2998.9408 |
| GA [3] | 3.51025 | 0.7 | 17 | 8.35 | 7.8 | 3.36220 | 5.28772 | 3067.561 |
| SCA [24] | 3.50875 | 0.7 | 17 | 7.3 | 7.8 | 3.46102 | 5.28921 | 3030.563 |
| HS [67] | 3.52012 | 0.7 | 17 | 8.37 | 7.8 | 3.36697 | 5.28871 | 3029.002 |
| FA [68] | 3.50749 | 0.7001 | 17 | 7.71967 | 8.08085 | 3.35151 | 5.28705 | 3010.13749 |
| MDA [69] | 3.5 | 0.7 | 17 | 7.3 | 7.67039 | 3.54242 | 5.24581 | 3019.58336 |
| Algorithm | Optimum Variables | Optimum Weight | ||
|---|---|---|---|---|
| d | D | N | ||
| IHAOHHO | 0.055883 | 0.52784 | 4.7603 | 0.011144 |
| AO [55] | 0.0502439 | 0.35262 | 10.5425 | 0.011165 |
| HHO [42] | 0.051796393 | 0.359305355 | 11.138859 | 0.012665443 |
| SSA [39] | 0.051207 | 0.345215 | 12.004032 | 0.0126763 |
| WOA [38] | 0.051207 | 0.345215 | 12.004032 | 0.0126763 |
| GWO [32] | 0.05169 | 0.356737 | 11.28885 | 0.012666 |
| PSO [26] | 0.051728 | 0.357644 | 11.244543 | 0.0126747 |
| MVO [23] | 0.05251 | 0.37602 | 10.33513 | 0.012790 |
| GA [3] | 0.051480 | 0.351661 | 11.632201 | 0.01270478 |
| HS [67] | 0.051154 | 0.349871 | 12.076432 | 0.0126706 |
| Algorithm | Optimum Variables | Optimum Weight | |
|---|---|---|---|
| x1 | x2 | ||
| IHAOHHO | 0.79002 | 0.40324 | 263.8622 |
| AO [55] | 0.7926 | 0.3966 | 263.8684 |
| HHO [42] | 0.788662816 | 0.408283133832900 | 263.8958434 |
| SSA [39] | 0.78866541 | 0.408275784 | 263.89584 |
| AOA [25] | 0.79369 | 0.39426 | 263.9154 |
| MVO [23] | 0.78860276 | 0.408453070000000 | 263.8958499 |
| MFO [66] | 0.788244771 | 0.409466905784741 | 263.8959797 |
| GOA [70] | 0.788897555578973 | 0.407619570115153 | 263.895881496069 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.; Jia, H.; Abualigah, L.; Liu, Q.; Zheng, R. An Improved Hybrid Aquila Optimizer and Harris Hawks Algorithm for Solving Industrial Engineering Optimization Problems. Processes 2021, 9, 1551. https://doi.org/10.3390/pr9091551
Wang S, Jia H, Abualigah L, Liu Q, Zheng R. An Improved Hybrid Aquila Optimizer and Harris Hawks Algorithm for Solving Industrial Engineering Optimization Problems. Processes. 2021; 9(9):1551. https://doi.org/10.3390/pr9091551
Chicago/Turabian StyleWang, Shuang, Heming Jia, Laith Abualigah, Qingxin Liu, and Rong Zheng. 2021. "An Improved Hybrid Aquila Optimizer and Harris Hawks Algorithm for Solving Industrial Engineering Optimization Problems" Processes 9, no. 9: 1551. https://doi.org/10.3390/pr9091551