1. Introduction
The vibration of marine gears is transferred through the shaft, bearing, housing, and isolator to the ship foundation. According to roles in the vibration transfer process, the system is composed of tripartite: excitation source, transmission path, and receiver. The gear pair acts as the excitation source, the ship foundation serves as the receiving structure, and the shafts, bearings, housing, and isolators formed the transfer paths. These paths can further be divided in detail according to the location or direction of vibration transferring. To decrease the foundation’s vibration, on the one hand, technologies such as gear tooth modification can be adopted to reduce the excitation [
1]; on the other hand, the vibration transfer process can be controlled to reduce the transferring of vibration energy between each layer [
2]. The purpose of vibration transfer control is to minimize the vibration energy entered into the receiver and distribute the vibration energy in the receiving structure as reasonably as possible. For passive control or structural modification to achieve vibration reduction, it is very important to conduce the transfer path analysis (TPA) and identify the main paths.
To carry out the TPA, a complete system dynamic model is required. Currently, research on gear systems and vibration isolation systems (VIS) are independent of each other. The gear system dynamic analysis stars with a lumped parameter model of the transmission system [
3], assuming a rigid housing and constraining the bearings to rotate only, including the time-varying mesh stiffness (TVMS) and transmission error (TE) excitation, and calculate the bearing vibration. Then, a housing finite element (FE) model is adopted [
4,
5], in which the isolation system is treated as simplified springs to obtain the dynamic response of the housing foot. When analyzing the isolation system, the gearbox is regarded as rigid mass and the excitation is treated as simple harmonic. Then the transmissibility of the vibration isolation system is analyzed [
6]. Finally, the vibration acceleration transferred to the ship foundation is determined based on the dynamic response of the housing foot and the transmissibility of the vibration isolation system. Although some scholars coupled the transmission system with housing, the gearbox and VIS remain separated [
7,
8,
9,
10,
11].
Some papers presented research on the vibration transferring in a gear system that contains a geared transmission system and housing. The frequency response function characterizes the relationship between the steady-state output and input of the system in the frequency domain, which is of great help for vibration transfer analysis. Guo [
12] measured the frequency response function of a gear-bearing-housing system. In the gear system, the vibration of the gears is sequentially transferred to the housing through the shaft and bearings. Based on a simplified 8 degree of freedom (DOF) dynamic model, Xiao [
13] found that the major vibration reduction appears during the transfer process from the inner ring to the outer ring of bearings, and the least attenuation occurs during the transfer from the outer ring to the housing. In traditional gear system dynamics analysis, the transmission system and the housing are independent, and the bearings serve as a bridge connecting the transmission system and the housing, playing a significant role in vibration transferring. To investigate the contribution of bearing on the vibration transferring, Vanhollebeke [
14] treated each bearing as a separate vibration transfer path and identified the main one. Incorporating the flexibility of the housing into the transmission system can provide a more reasonable analysis of dynamic response and vibration transferring. Xu [
15] developed a coupled dynamic model of the gear and casing, and analyzed the danger resonance path. For planetary transmissions, the vibration transfer path is more complex. Nie [
16] built a multiple transfer path model from each mesh point to the ring gear sensor for the wind power gearbox.
There is a large amount of research on the TPA of a vibration isolation system. In a vibration isolation system, each isolator acts as a transfer path during the vibration transfer process. Liu [
17] explored how different suspension components contributed to the structure-borne noise transmission into a railroad vehicle due to wheel/rail forces that resulted from random surface roughness. The traction rods and lateral dampers are both significant structure-borne pathways, according to the results. In order to reduce the compliance and mobility transfer function of a single degree of freedom system under a harmonic ground acceleration excitation, Baduidana [
18] deduced the optimal values of inerter-based isolators. Li [
19] built a dynamic model for the double-layer marine reducer box with an elastic element connecting the exterior and interior cases, and performed transfer path contribution analysis for each excitation separately based on the force transmissibility index. Results show that the primary channel is the last elastic element that should be given priority during the vibration reduction design process. The VPF index can more properly represent the nature of vibration energy propagation than the traditional force transmissibility and motion transmissibility index, and thus yield wide usage in the dynamic analysis of a vibration isolation system [
20,
21,
22]. Similarly, transfer path analysis based on the VPF index is more reasonable than the traditional TPA. Yang [
23] ranked the vibration contribution provided by all paths to the target body and identified the critical path based on the VPF theory for an offshore vehicle power device. Lee [
24] recognized the main vibration transfer path of a test vehicle by measuring the VPF through the 18 isolators.
There is little research on the vibration characteristics and transferring assessments of gear isolation coupled system. Yang [
25] constructed a housing FE model in which vibration isolators are considered as spring-damper elements, then extracted the physical parameters of the housing, built a gear-housing-isolation coupled dynamic system based on mass, damping, and stiffness variables, and finally studied the influence of stiffness and the number of isolators on the system vibration response. Luan [
26] coupled the planetary gear transmission system with the double-layer box through MASTA software, and analyzed the vibration reduction effect of isolators between the dual box. Ren compared the VPF entered into the hull base between different vibration isolation types for a marine gearbox [
27] and compared the arrangement of elastic isolators on the dynamic response of the hull base [
28].
A detailed TPA based on an integrated gear-housing-isolation model and the VPF theory can provide effective guidance for low-noise design of marine transmission systems. In this paper, a flexible supported gear system is divided into different layers according to the vibration transferring process, that is, gear, shaft, bearing, housing, isolator, and foundation. According to the location and direction of vibration transferring, the VPF index is adopted to analyze the detailed transfer characteristics, and the main paths are identified in a broad speed range.
2. Dynamic Modeling
2.1. Model Description
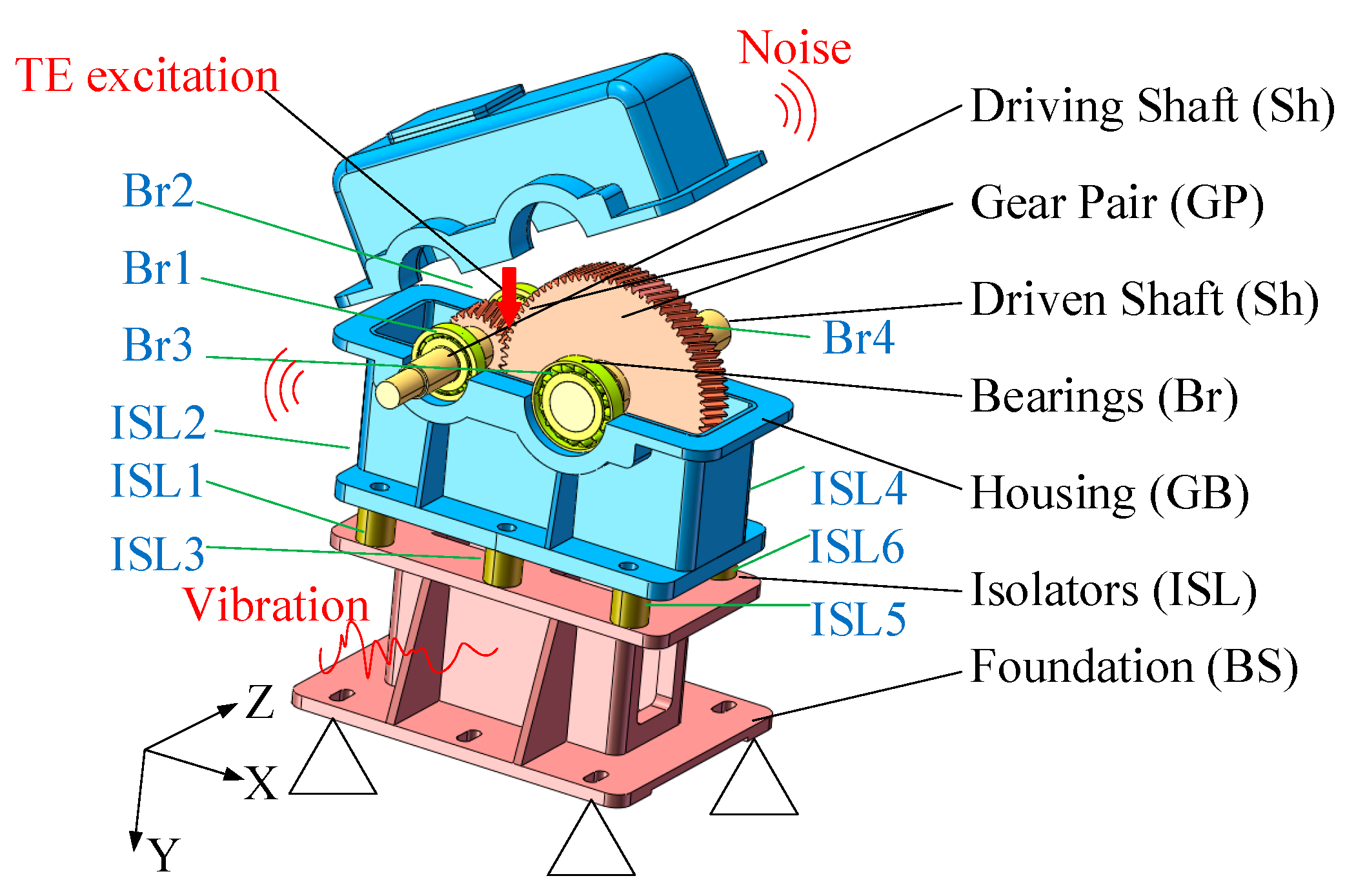
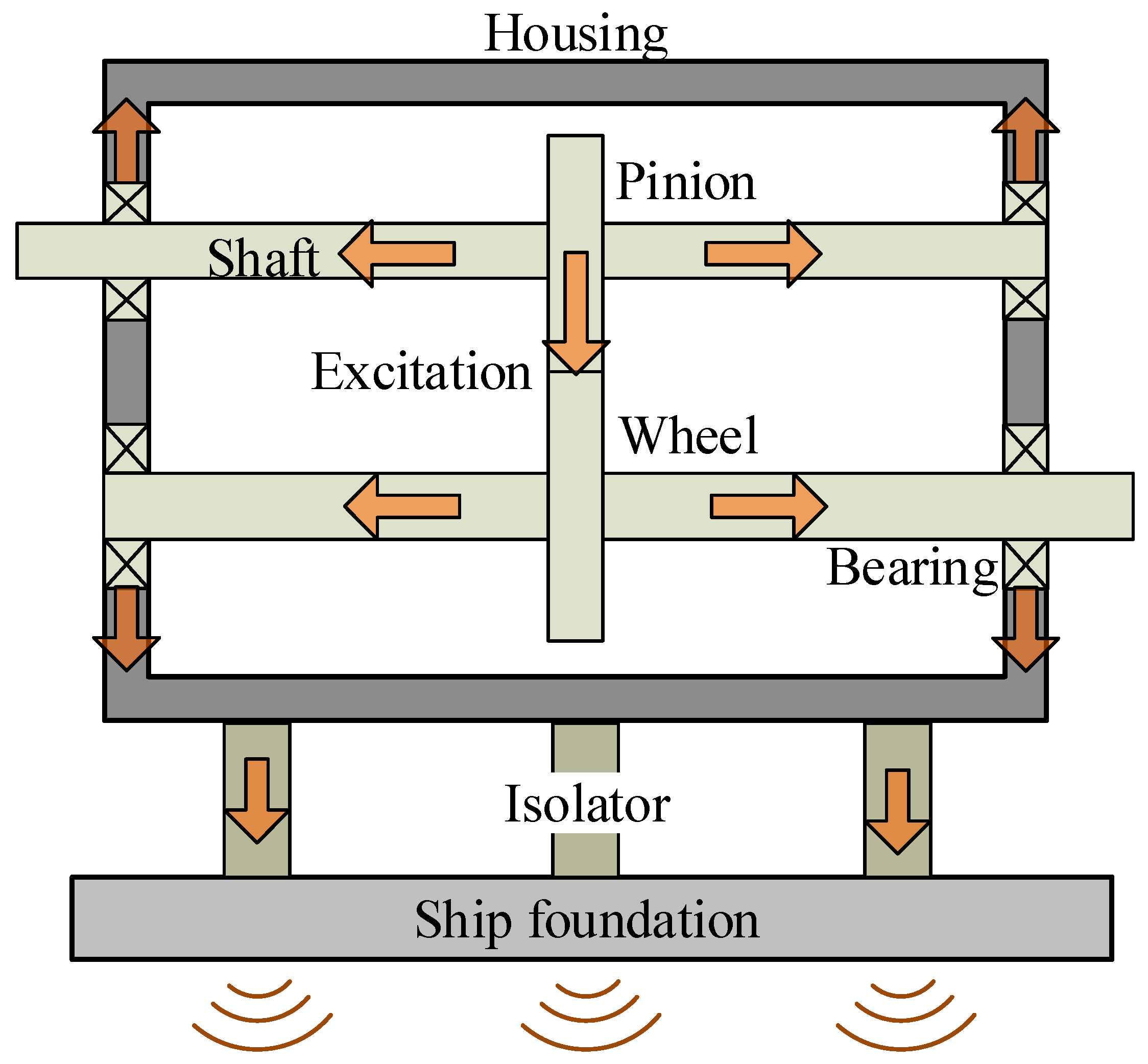
In order to decrease the gear vibration transferring to the ship foundation, gear devices are typically installed through elastic elements. The commonly used VIS is single-layer configuration.
Figure 1 shows the gear isolation system adopted in this study. Br1, Br2, Br3, and Br4 are the 1st, 2nd, 3rd, and 4th bearing, respectively. ISL1, ISL2, ISL3, ISL4, ISL5, and ISL6 are the 1st, 2nd, 3rd, 4th, 5th, and 6th isolators, respectively. The speed of the driving shaft ranges from 50 r/min to 15,000 r/min, and the torque applied on the driven shaft is 1200 N·m.
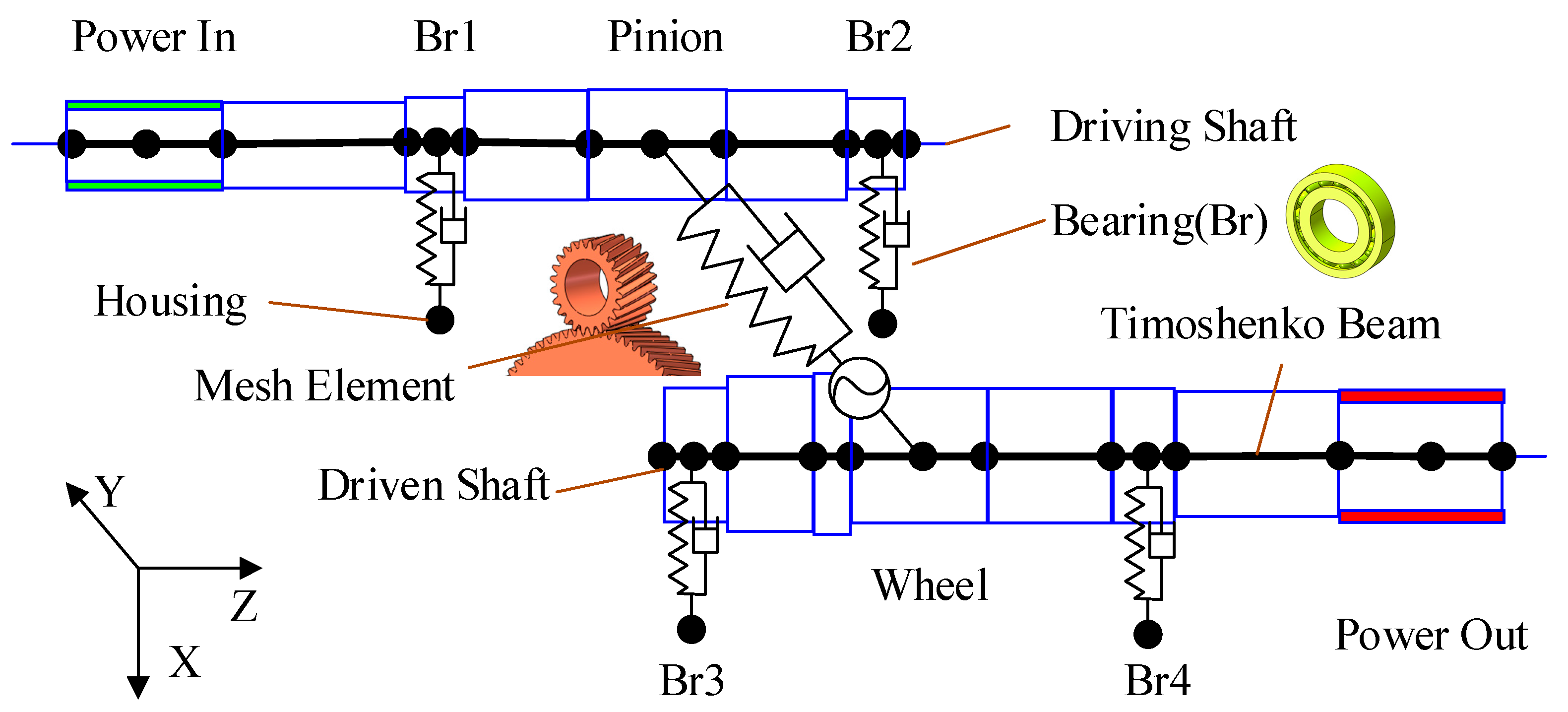
Continuous models have advantages over the lumped mass ones in describing the vibration transferring characteristics, because it can model the system dynamic properties in a more exact way. For this reason, with the exception of gears and bearings, which are modelled using lumped parameters, all subsystems are modelled as a continuum in this study. Each node has six-DOF, {ux, uy, uz, rotx, roty, rotz}, namely translational motion along the x-axis, y-axis, z-axis, and rotation around the x-axis, y-axis, and z-axis, respectively.
In this study, only the TE excitation of gears is applied and other excitations are overlooked, since the TE excitation is the primary reason for the generation of vibration and noise [
1,
29]. This study also excludes the non-linear items, such as gear backlash from the calculation, due to the linear feature of the gear system and the difficulty for the impedance model to directly consider the non-linear terms.
2.2. Transmission System Modeling
A single-stage helical geared transmission system is used in this study, and the dynamic model is shown in
Figure 2.
The dynamic equation of a gear system is described [
9]:
where
is the displacement vector of nodes,
is the mass matrix of gears,
is the mesh damping matrix,
is the mesh damping,
is the mesh stiffness matrix,
is the normal mesh stiffness,
is the reaction load vector of shaft,
is the general mesh error vector, the superscript GP denotes the gear pair subsystem,
V is the project vector transferring displacement in the global coordinate to the line of action, and
VT is the transposition of
V [
9].
Let
equal
for approximation, then Equation (1) can be simplified to the following linear equation:
where
is the transmission error excitation,
is the mean mesh stiffness of gear pair, i.e., mean (
).
For linear gear systems, the time-varying parameters in Equation (2) are periodic. So after removing the mean term and performing Fourier transform, the frequency form of Equation (2) yields.
where
is the displacement vector in a frequency form,
is the reaction load in the frequency domain, and
is the TE load in the frequency domain.
Let
and
, then Equation (3) can be expressed as an impedance form:
where
is the impedance matrix of mesh element, and
is the frequency velocity vector.
Using a generic FE approach, the shaft is modeled. Depending on the diameters and the location of the power points and support points, it is divided into a number of shaft segments. Timoshenko beam elements with two nodes and six DOF per node are used to simulate each shaft segment. The equation of motion is given:
The governing motion equation can be obtained in the following manner after putting together sufficient matrices for each shaft section and taking into account the influence of external load:
where
,
, and
are the mass matrix, damping matrix and stiffness matrix of shaft subsystem, respectively,
is the node displacement vector,
is the external load, and the superscript Sh denotes the shaft subsystem.
The shaft subsystem’s impedance equation can be calculated in the form of:
where
is the impedance matrix,
is the velocity vector in the frequency domain,
is the frequency domain form of
, and
is the external load vector of shaft system.
The bearing is modeled by the Lim model [
30]. According to the load–displacement relationship derived by setting up contact between the bearing rollers and the inner and outer rings, and establishing the force balance equation, the one-node form complete stiffness matrix with 6 × 6 order is given by:
In this paper, the bearing is made up of two nodes. The first node is attached to the shaft, while the second one is attached to the housing. The matrix of two-node form stiffness results in:
After considering the damping characteristics, the bearing’s impedance matrix is obtained as follows:
where
is the damping of the bearing,
is the complex number, and the superscript Br denotes the bearing subsystem.
By applying the external load, the bearing subsystem’s impedance equation is written:
2.3. Housing Modeling
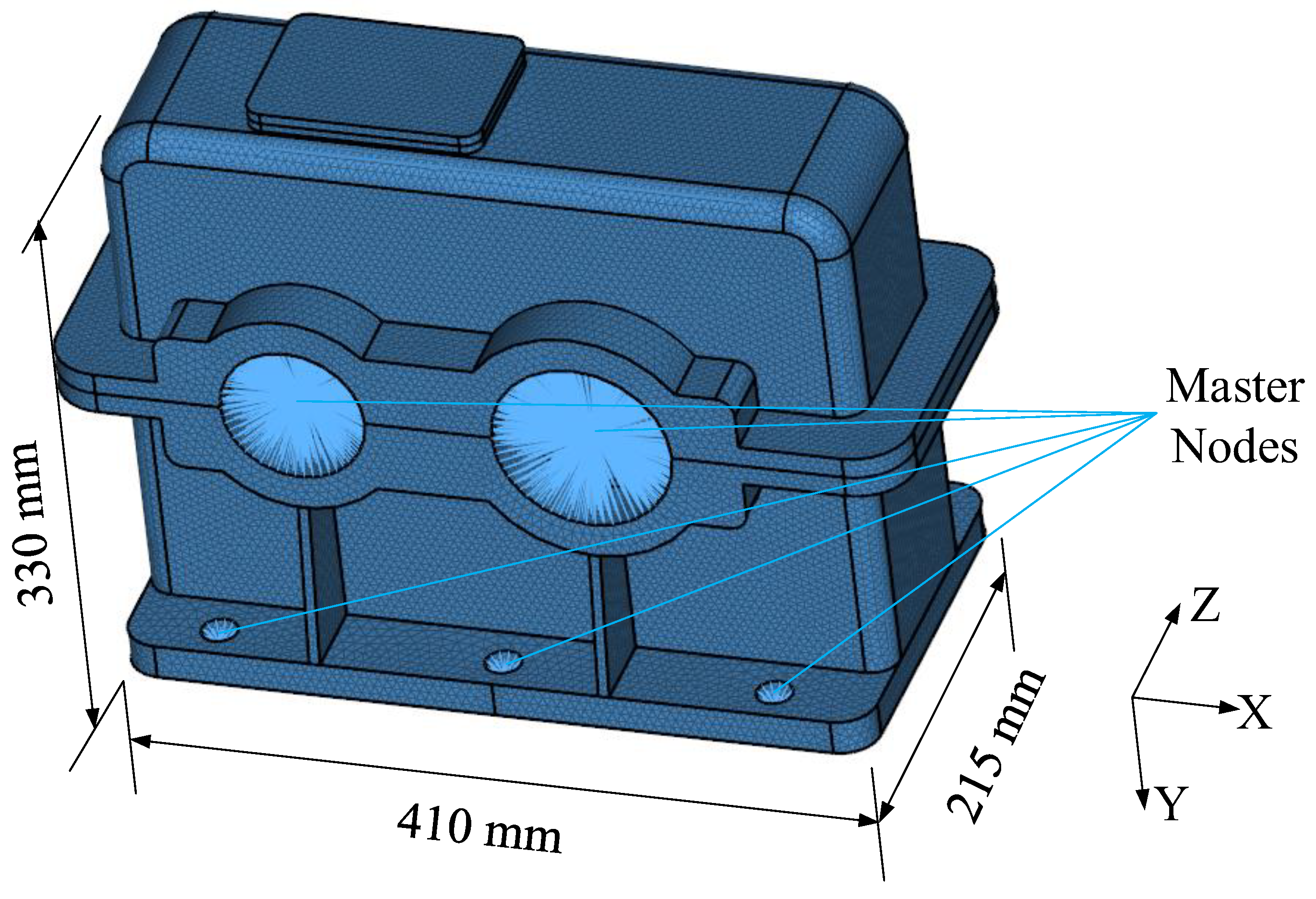
The housing in this research measures 410 mm in length, 215 mm in width, and 330 mm in height. The material is S355B (according to ISO 630-2), which has a density of 7850 kg/m3, a Young’s modulus of 2.07 × 1011 Pa, a Poisson’s ratio of 0.3, and a damping ratio of 2%.
The housing is meshed using a 4-node tetrahedron with a 5 mm element size, and 315,000 elements and 76,000 nodes make up the FE model. Ten master nodes, including four bearing nodes and six isolator nodes, is created and meshed with a six-DOFs mass element. These master nodes are coupled with the bearing holes or bolt holes, respectively.
Figure 3 illustrates the construction of the FE model. The first 500 modes are obtained from the modal analysis using the block Lanczos method [
31,
32].
The mobility matrix of the housing can be described as a 60 × 60 matrix as there are ten external nodes in the housing, and each node offers six-DOF.
Each mobility element
can be calculated through Equation (13):
where
,
, and
are the modal stiffness, modal mass, and modal damping, respectively,
u is the modal shape,
r is the modal order,
, and
p = ux, uy, uz, rotx, roty, rotz.
The inversion of the mobility matrix will produce the housing’s impedance matrix.
The housing’s impedance equation can be generated in the form of:
where the superscript denotes the housing subsystem.
2.4. Isolator and Foundation Modeling
This study utilizes the rubber isolator, which is frequently applied in the field of engineering. Poisson’s ratio is 0.49, density is 1000 kg/m3, the loss factor is 0.1, and the elastic modulus is 1 × 107 Pa. The shape of the isolator is a cylinder with 40 mm diameter and height. The isolator is modeled as a continuous Timoshenko beam element.
Considering the torsional, axial, and flexural vibration, the state vector relationship between the two ends of the isolator can be arranged as a transfer matrix form:
Dynamic stiffness matrix can be obtained by transformation:
After considering the damping characteristics, the impedance matrix of isolator yields:
where
is the damping loss factor,
is the complex number.
The impedance equation of the isolator subsystem can be determined by assembling the impedance matrices for each isolator and taking the external load into account. Assembling the impedance matrix of each isolator and considering the external force, the impedance equation of the isolator subsystem can be obtained.
where
is the impedance matrix of isolator subsystem,
is the velocity vector of the isolator, and
is the external excitation force vector.
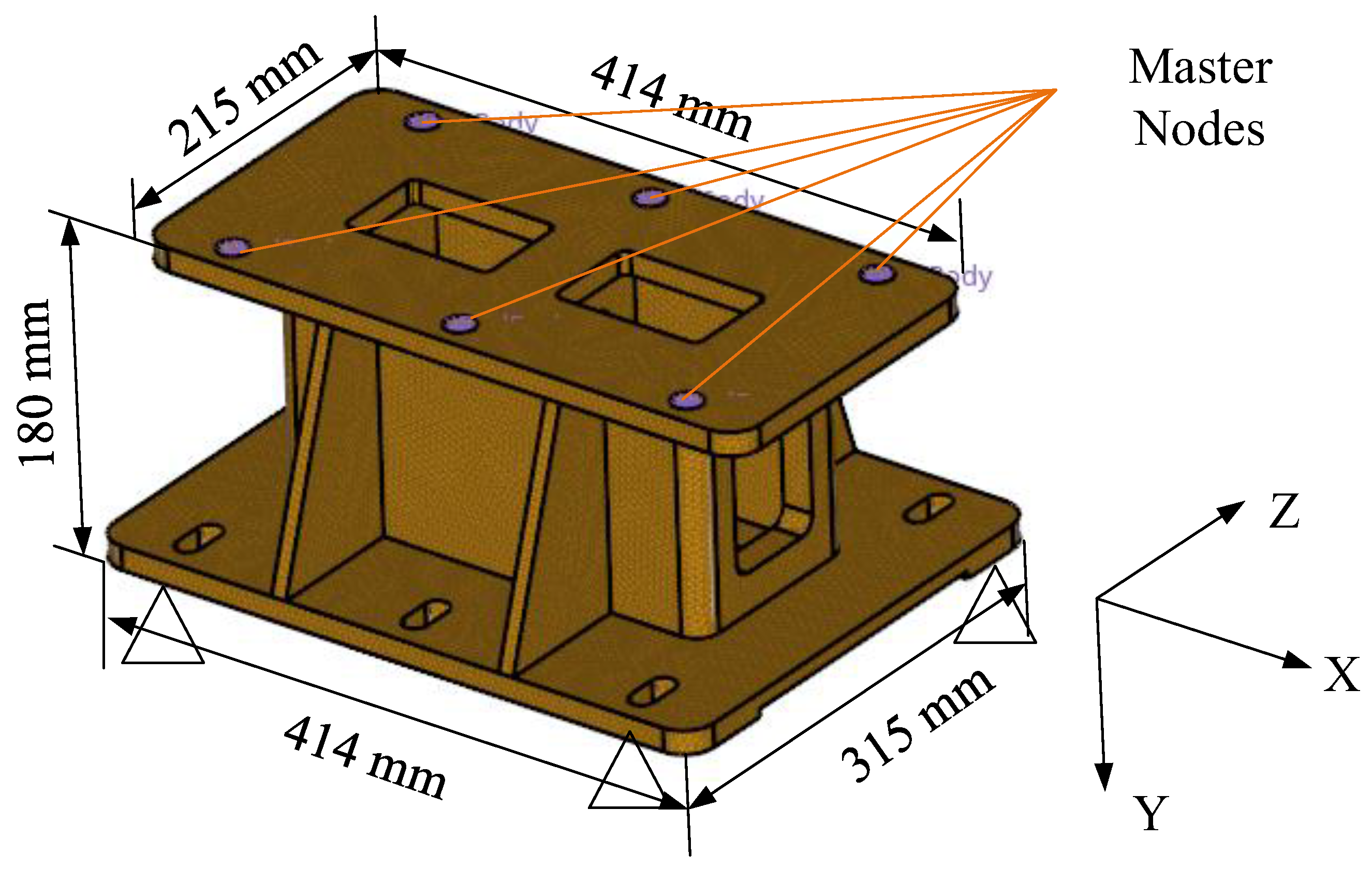
The foundation is 414 mm long, 180 mm high, 215 mm wide at the top, and 315 mm wide at the bottom. The material is AlMg1SiCu (ISO 209.1) with a density of 2700 kg/m
3, Young’s modulus of 7 × 10
10 Pa, Poisson’s ratio of 0.33, and a damping ratio of 2%.
Figure 4 depicts the construction of a foundation FE model using a 4-node tetrahedral element. The element is 5 mm in dimension. About 61,000 nodes and 265,000 elements make up the FE model. Six bolt holes on the top surface are coupled to each center node, which are defined as the master nodes and are meshed with mass elements. The bottom area is fixed, and the first 500 modes are acquired. The mobility matrix Y has a dimension of 3636 since the model comprises six master nodes, each of which provides six-DOF.
The foundation’s impedance equation can be written as follows, such as the way for housing:
where
is the velocity vector,
is the reaction force isolator to foundation.
2.5. Impedance Coupled Model
Impedance synthesis method [
9] is used to develop the impedance equation of the entire system after dynamic models of all subsystems were built. By putting together impedance matrix components according to the node number, the coupled system’s impedance equation may be immediately determined. Assume there is no external force present at the subsystem interfaces. The coupled system’s impedance equation can be expressed in the form of:
The following equation can be used to determine the velocity:
3. Layering Transfer Path Analyses
A vibration system can be generally split into three components: excitation source, transfer path, and receiver. Transfer path refers to all connection parts between the source and the receiving structure. By calculating the transmissibility and sorting the importance of each transfer path, the main path can be identified, which is very important for passive control and structural modification of vibration and noise reduction. With regard to a flexible supported gear system, the excitation source is the gear pair, and the receiver is the ship foundation.
The traditional TPA method takes force or velocity as variables to evaluate each transfer path. The VPF-based TPA can directly reflect the essence of vibration energy transferring. VPF is the average of instantaneous power over a period of time (for the minimum period of vibration for periodic vibration).
where
denotes the period,
denotes the external force, and
denotes the velocity.
Assuming that both forces and velocities are harmonic, the VPF can be expressed in frequency domain:
where
and
are force and velocity in the frequency, respectively.
is the real part of *, and *
H is the Hermitian transpose.
Since the force and velocity in Equation (24) are both complex, the VPF index can take into account both force and velocity, as well as their relative phases. The VPF index can be used to evaluate the vibration transferring process more effectively than force or velocity index. Moreover, the VPF as a scalar can consider the vibration of different directions synthetically.
The excitation power of the flexible supported gear system is generated by the dynamic TE of the gear. The excitation power of the gear can be expressed:
The vibratory power of the gears is entered into the foundation through the shaft, bearing, housing, and isolator, as is shown in
Figure 5. Therefore, the vibration transferring process can be divided into shaft, bearing, housing, isolator, and foundation layer. The vibratory power transmitted by each layer is:
where
denotes the shaft, bearing, housing, isolator, or foundation subsystem.
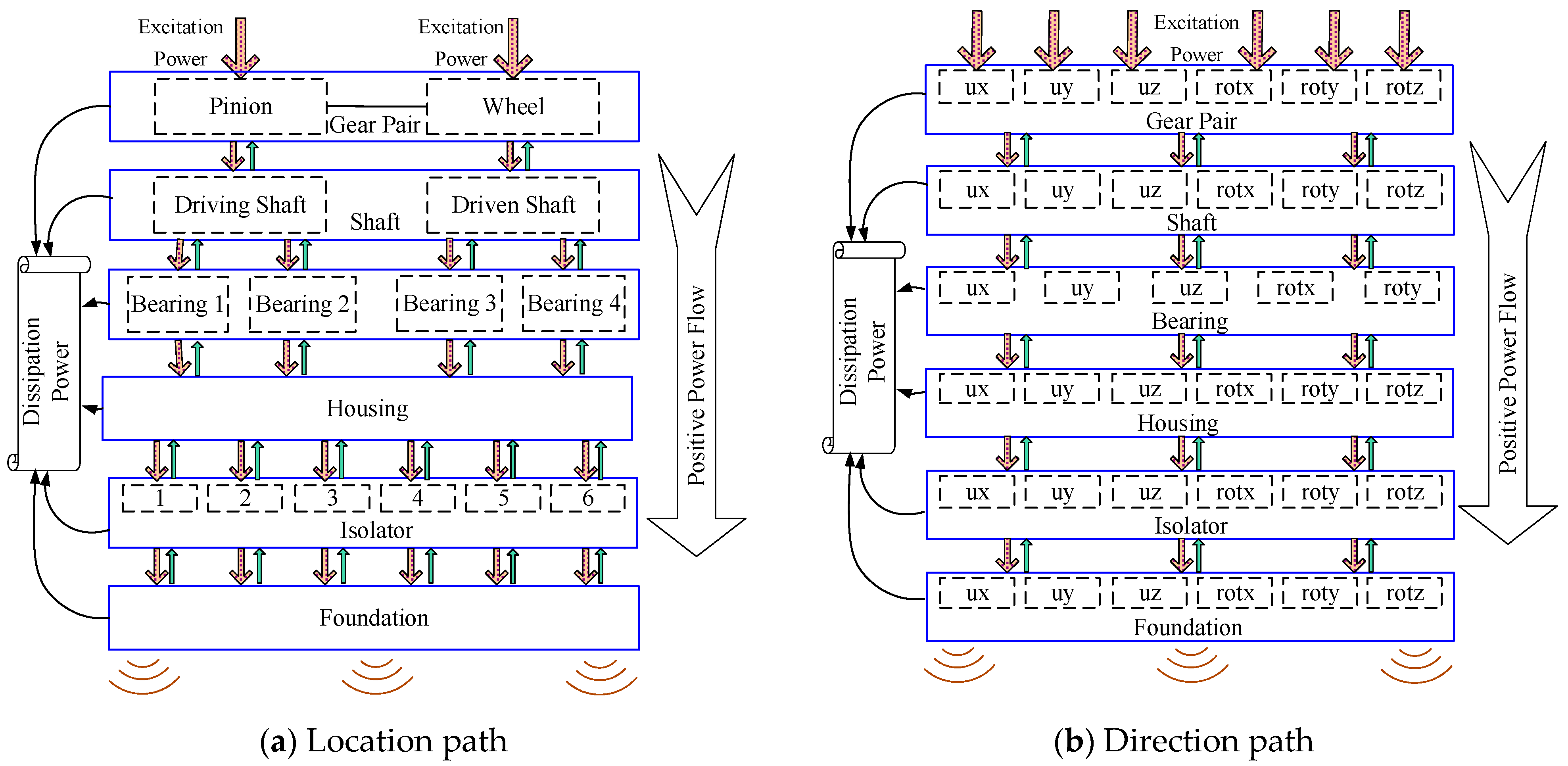
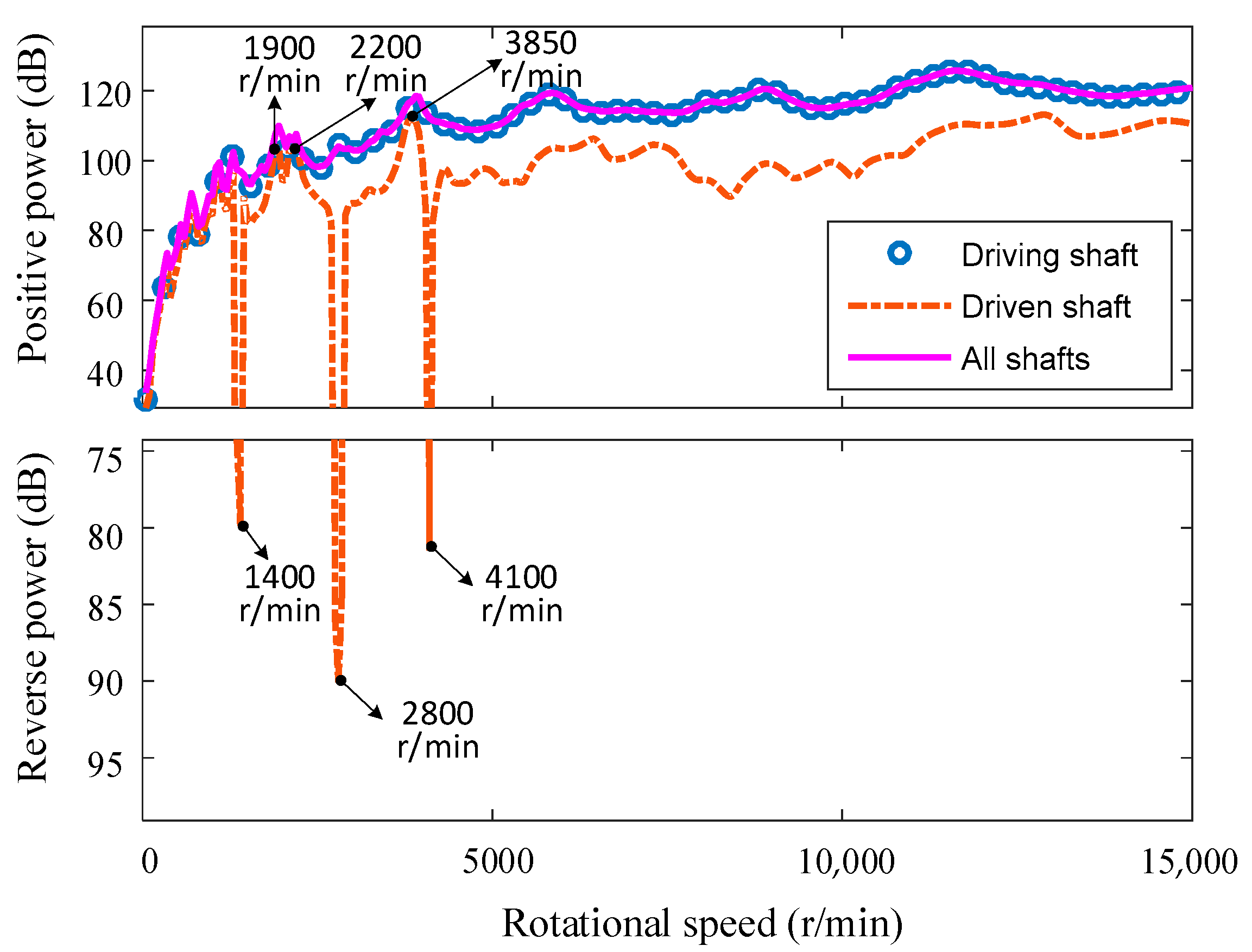
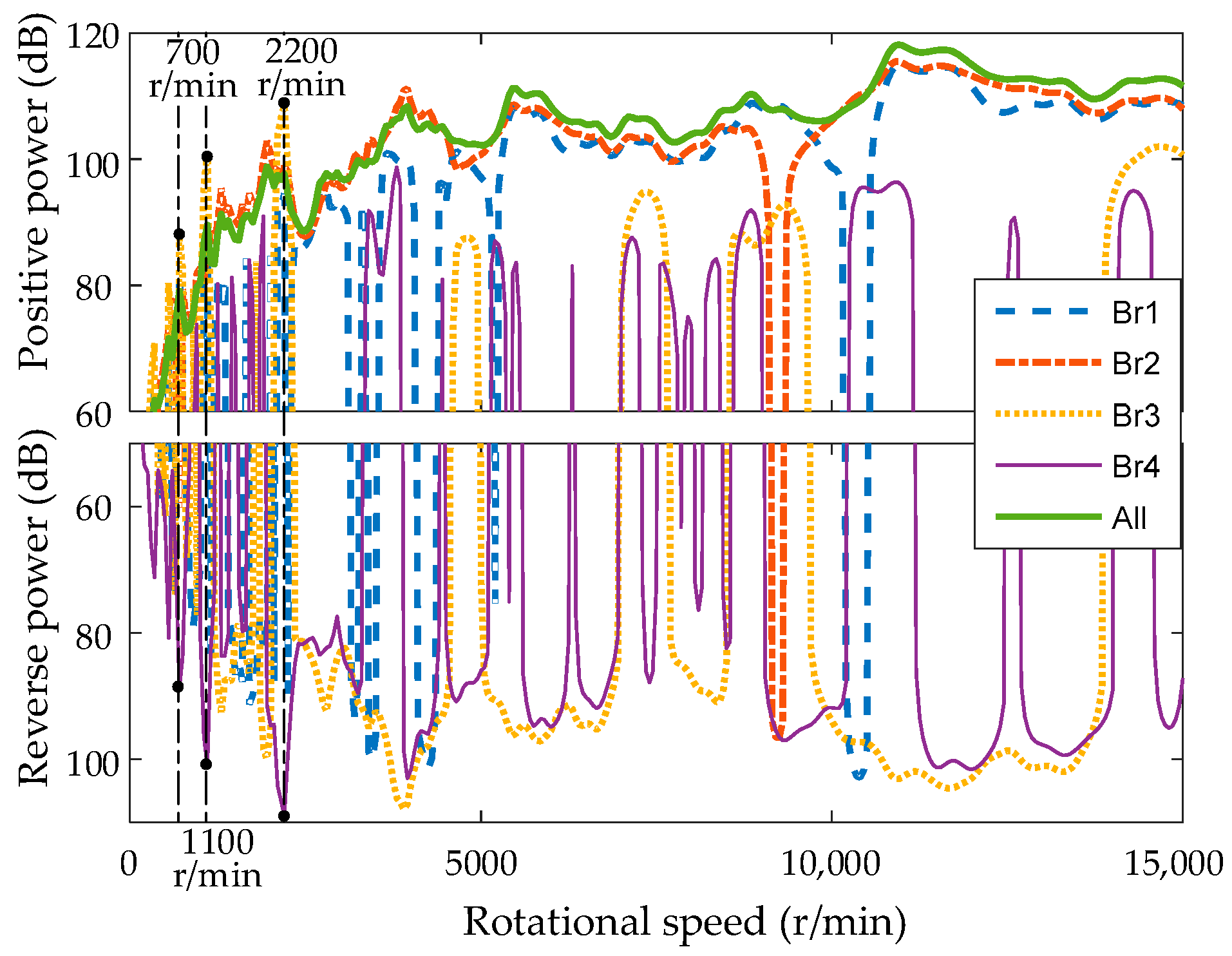
The transfer path of the gear system is the gear-shaft-bearing-housing-isolator-foundation in the whole. The transfer process of each layer can be divided into location transfer path and direction transfer path according to the location and direction of vibration transferring, as is described in
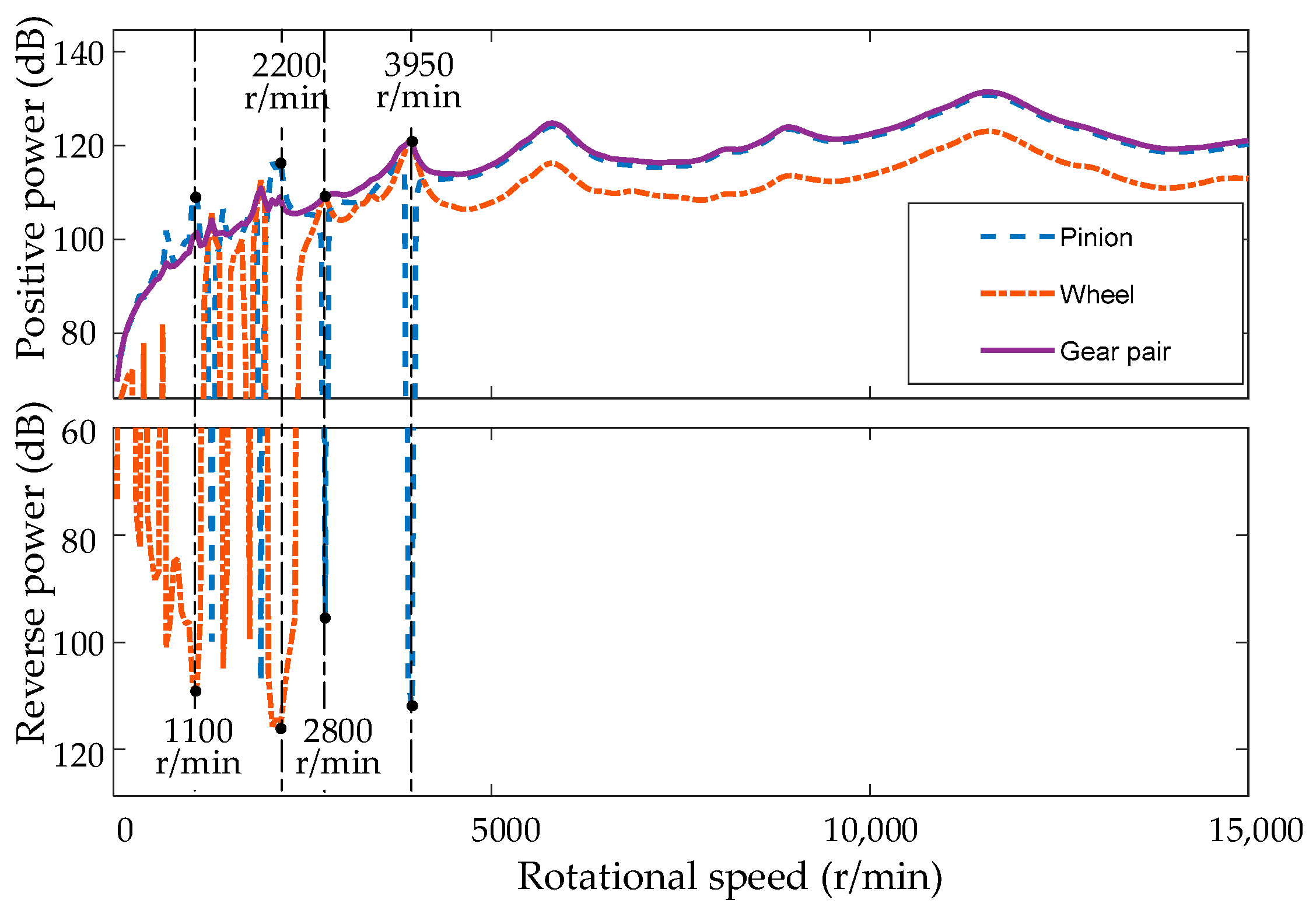
Figure 6. The layering location transfer path is shown in
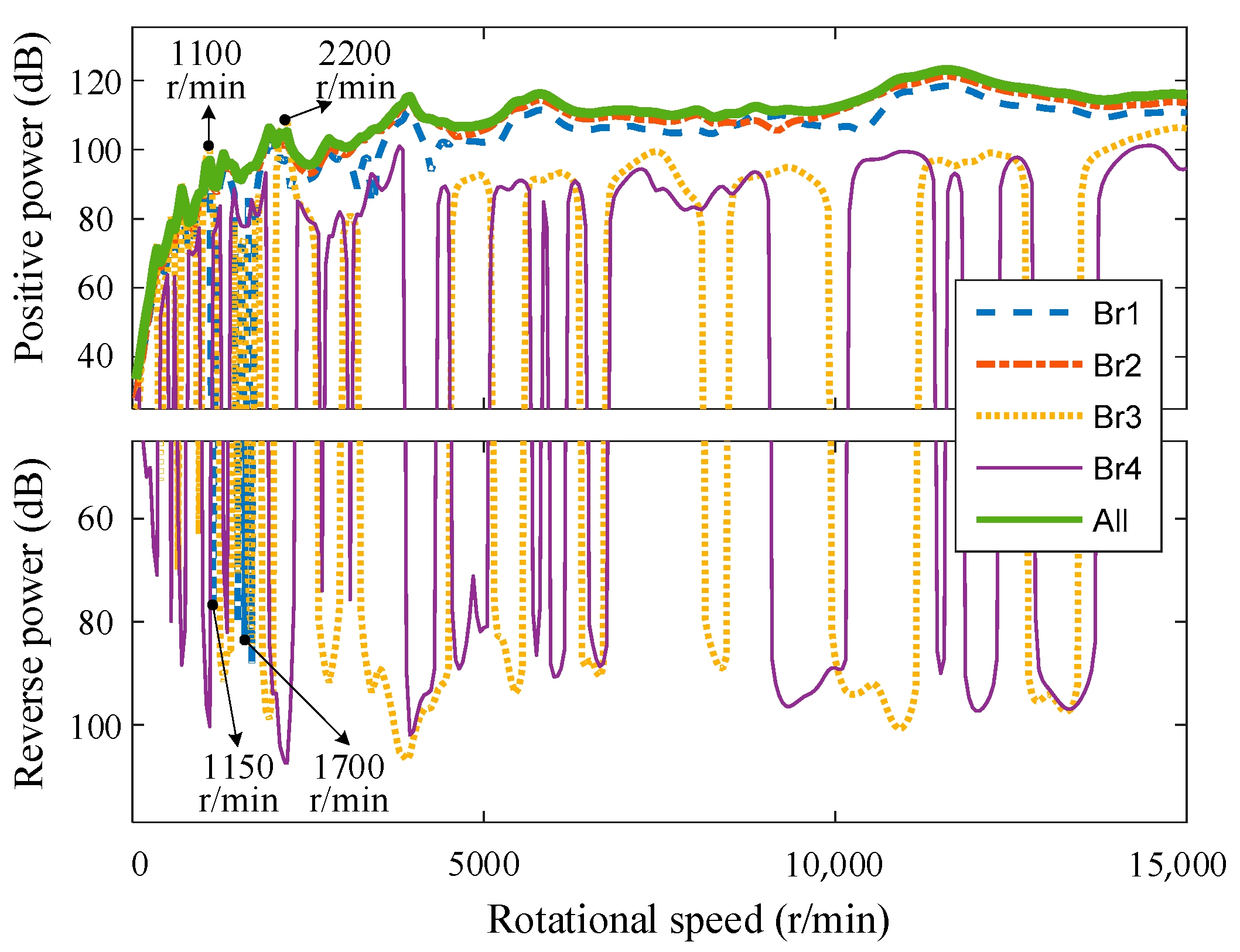
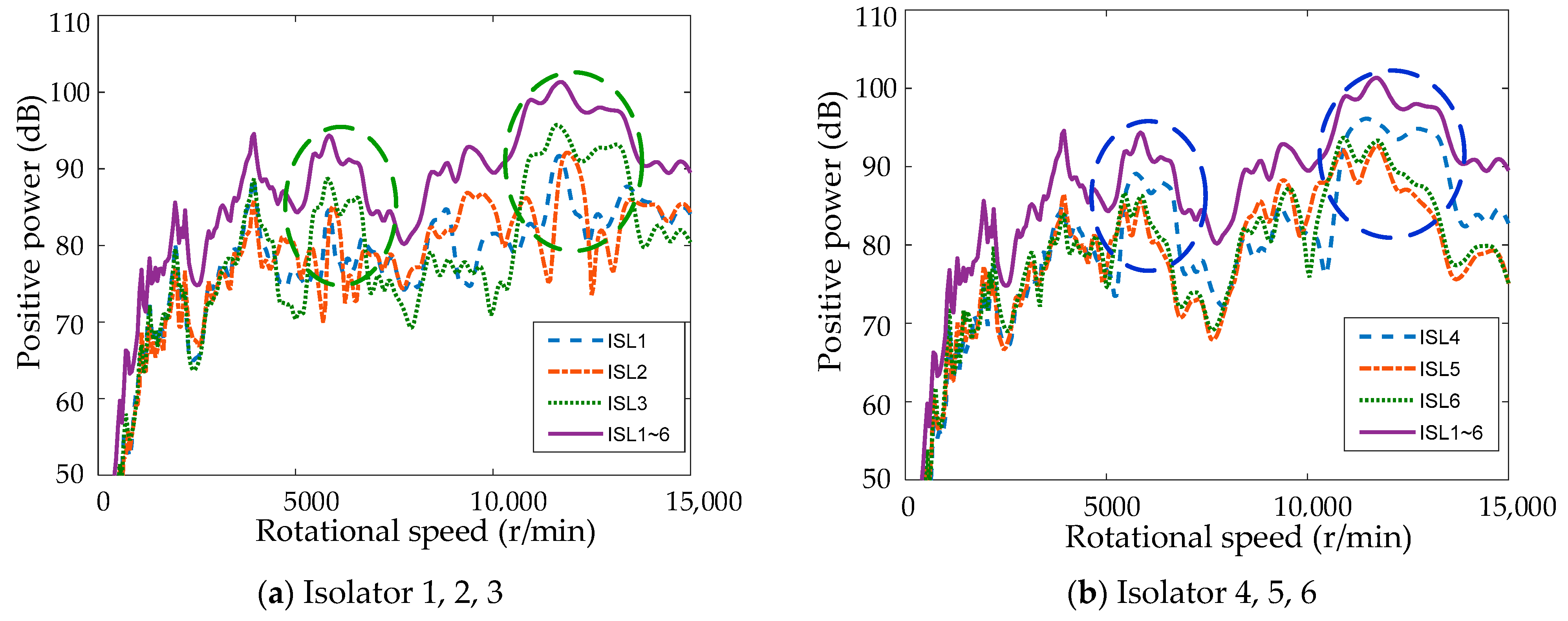
Figure 6a. The gear excitation power can be divided into pinion excitation power and wheel excitation power, which are transmitted to the driving shaft and the driven shaft, respectively, through the pinion and wheel; the driving shaft transfers the vibration to the bearings 1 and 2, and the driven shaft transfers to the bearings 3 and 4; each bearing transfers the vibration to the housing; and the housing transmits the vibration to the ship foundation through six vibration isolators. The layering direction transfer path is shown in
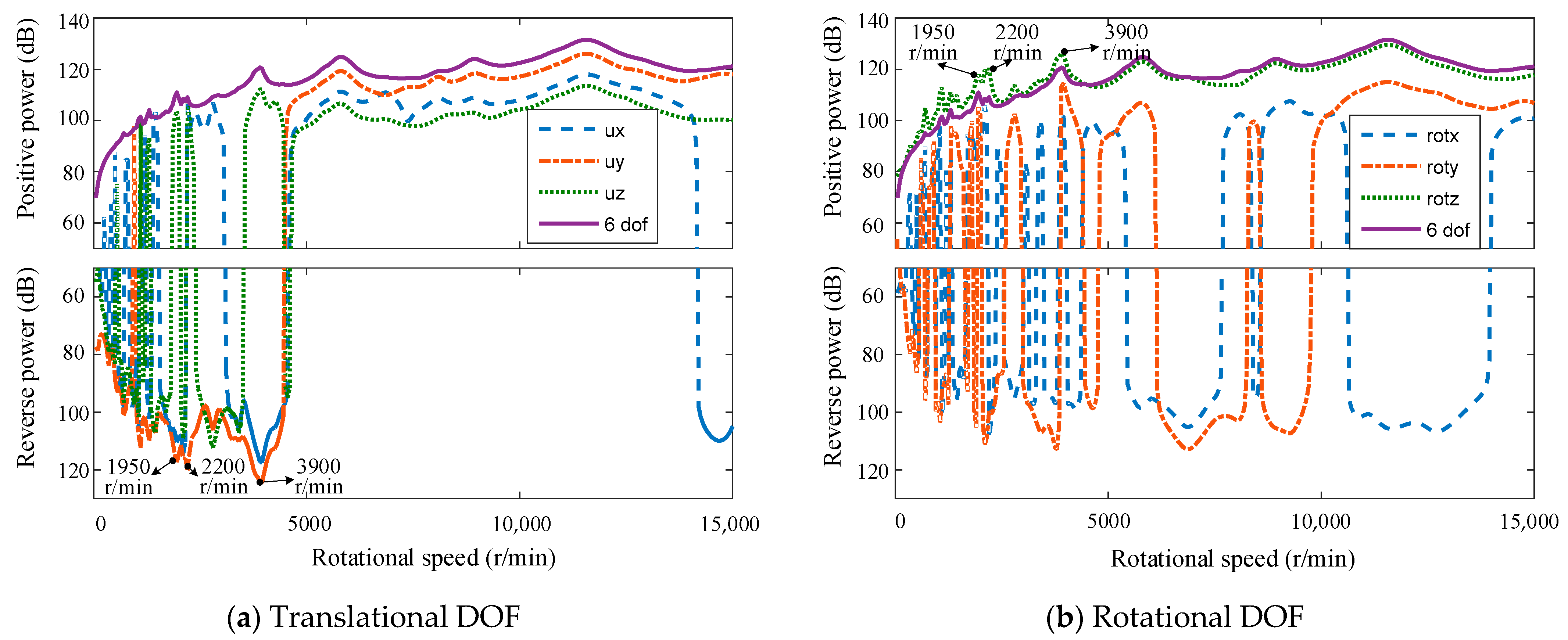
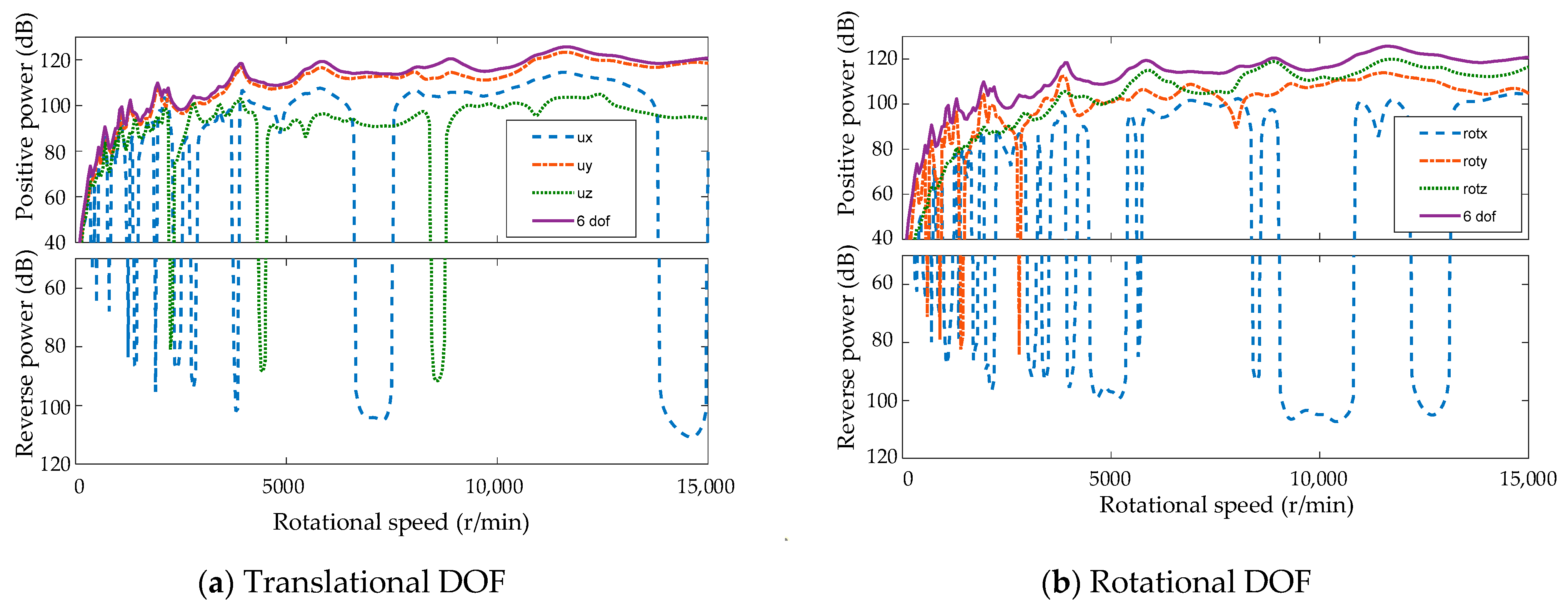
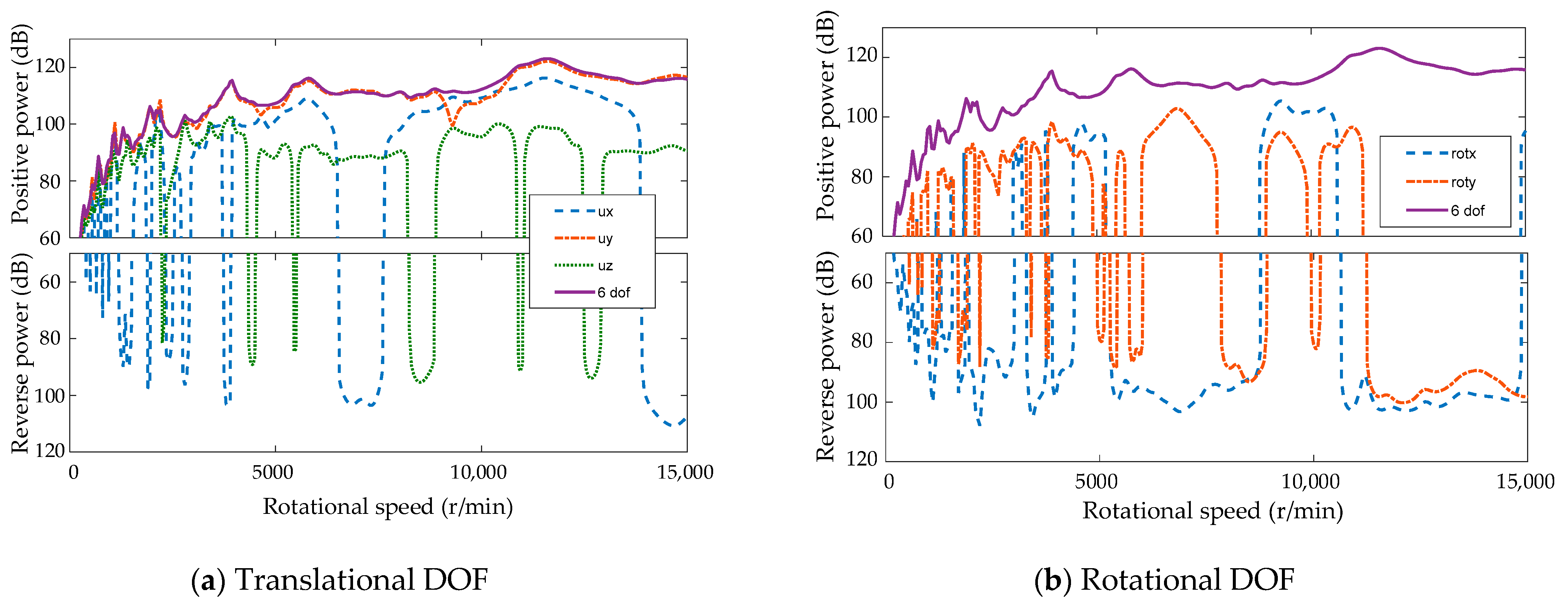
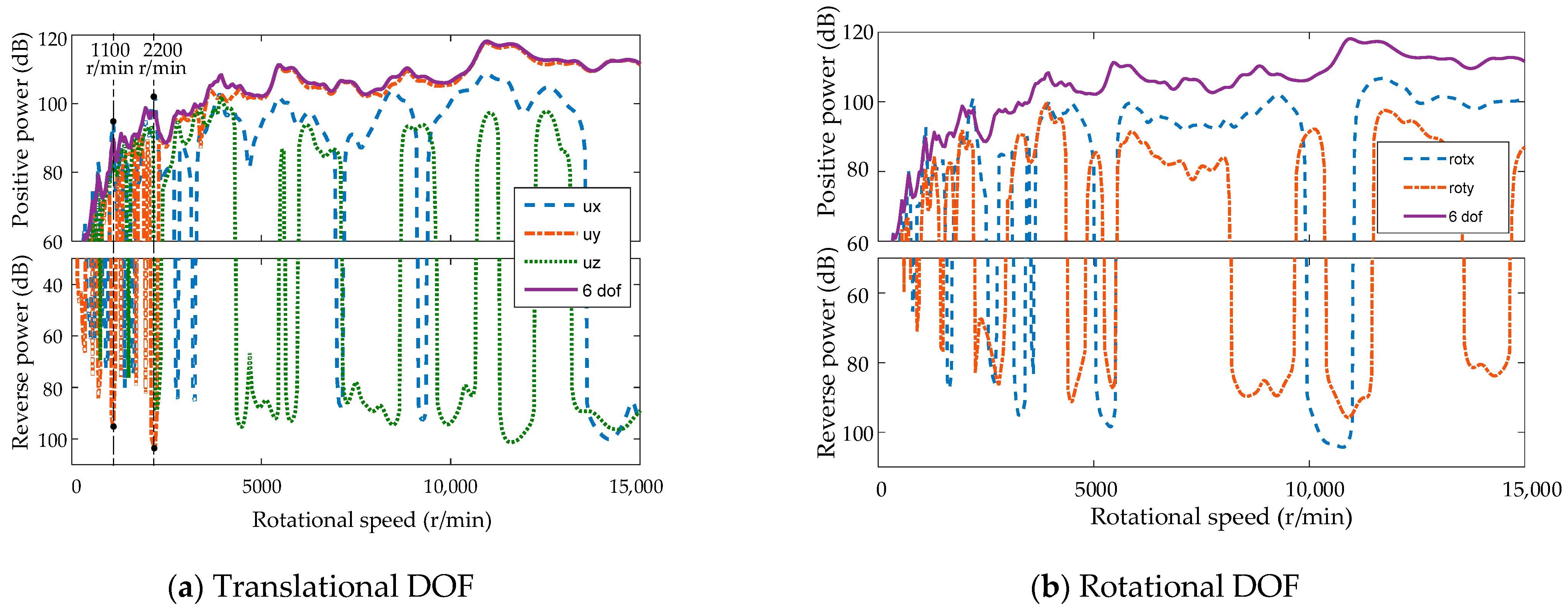
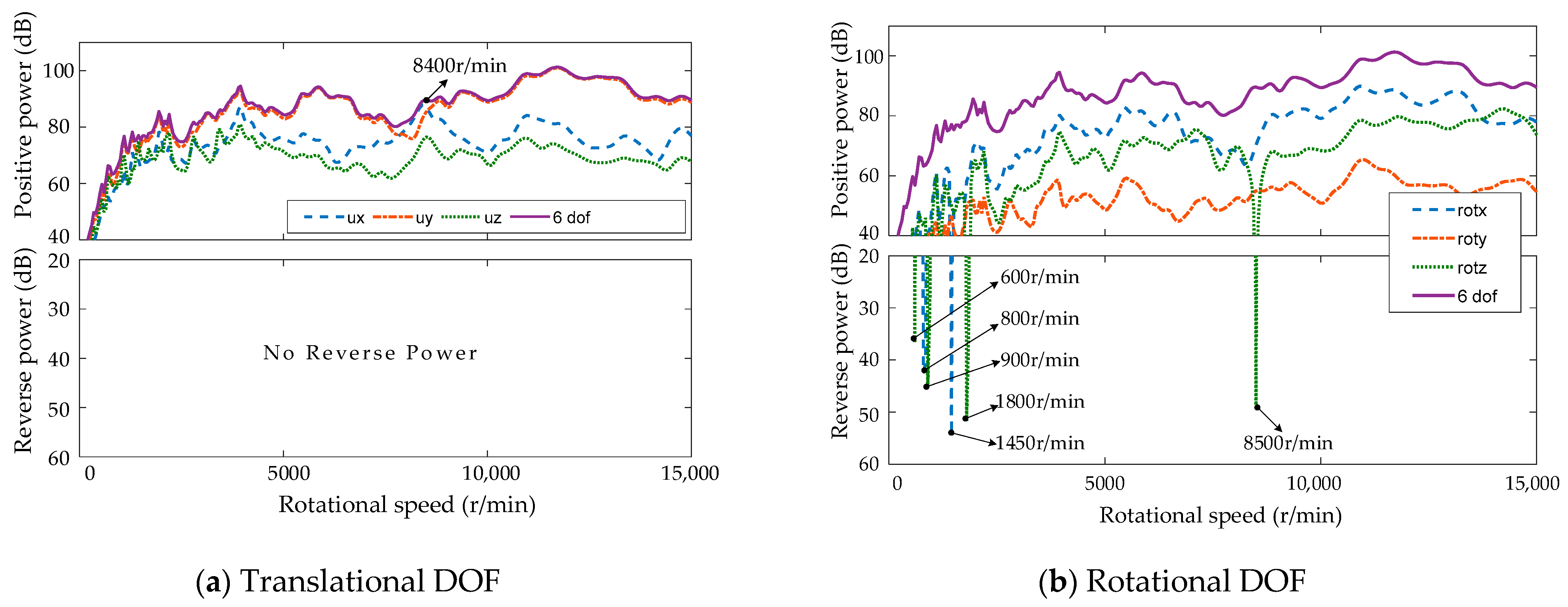
Figure 6b. Excitation power of gears includes six DOFs. The other subsystems include six DOFs, except bearing without torsional DOFs. The vibration energy transfer paths between subsystems can be regarded as virtual paths composed of six directions.
The vibratory power of each subsystem in location path is written as follows:
where
denotes the subsystems,
is the number of location paths in each layer, and
denotes the direction.
The vibration power of each subsystem in direction path can be yielded:


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}

















