
Process Model Inversion in the Data-Driven Engineering Context for Improved Parameter Sensitivities †

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
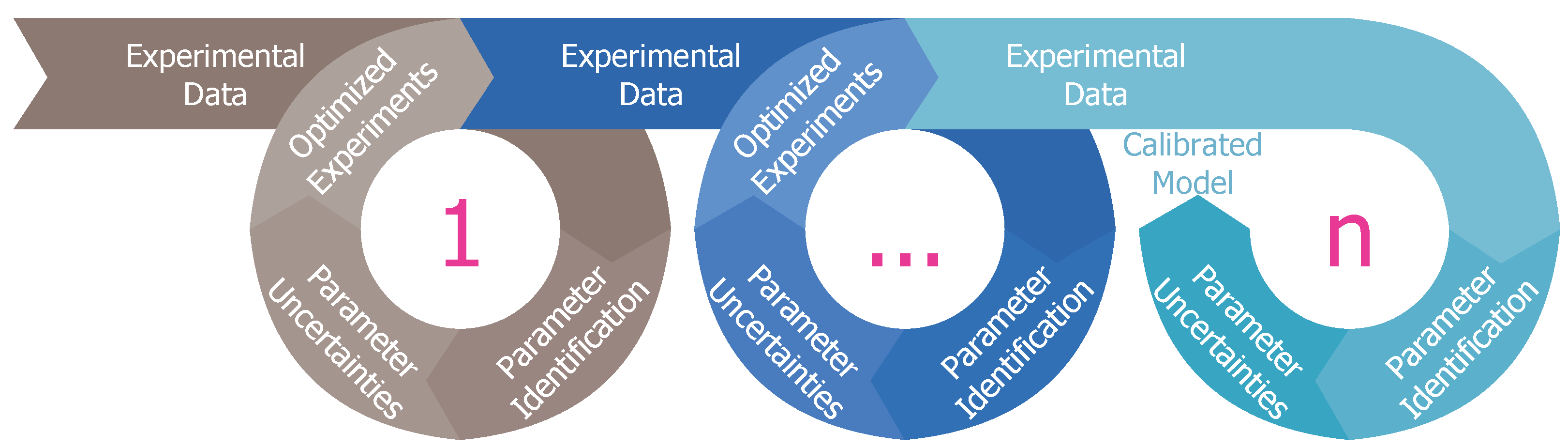
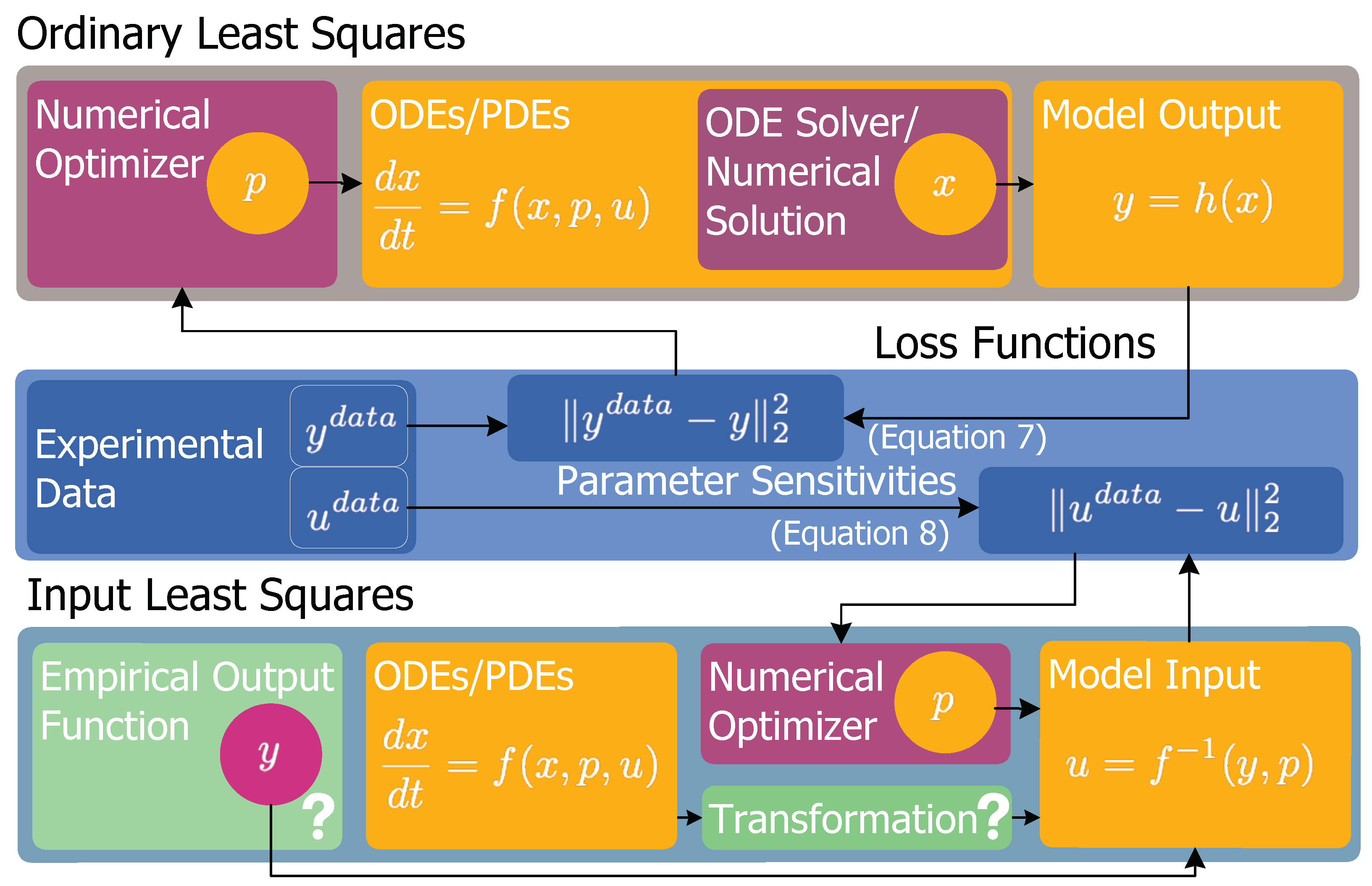
2.1. Parameter Identification Strategies
2.2. Transformation: Differential Flatness
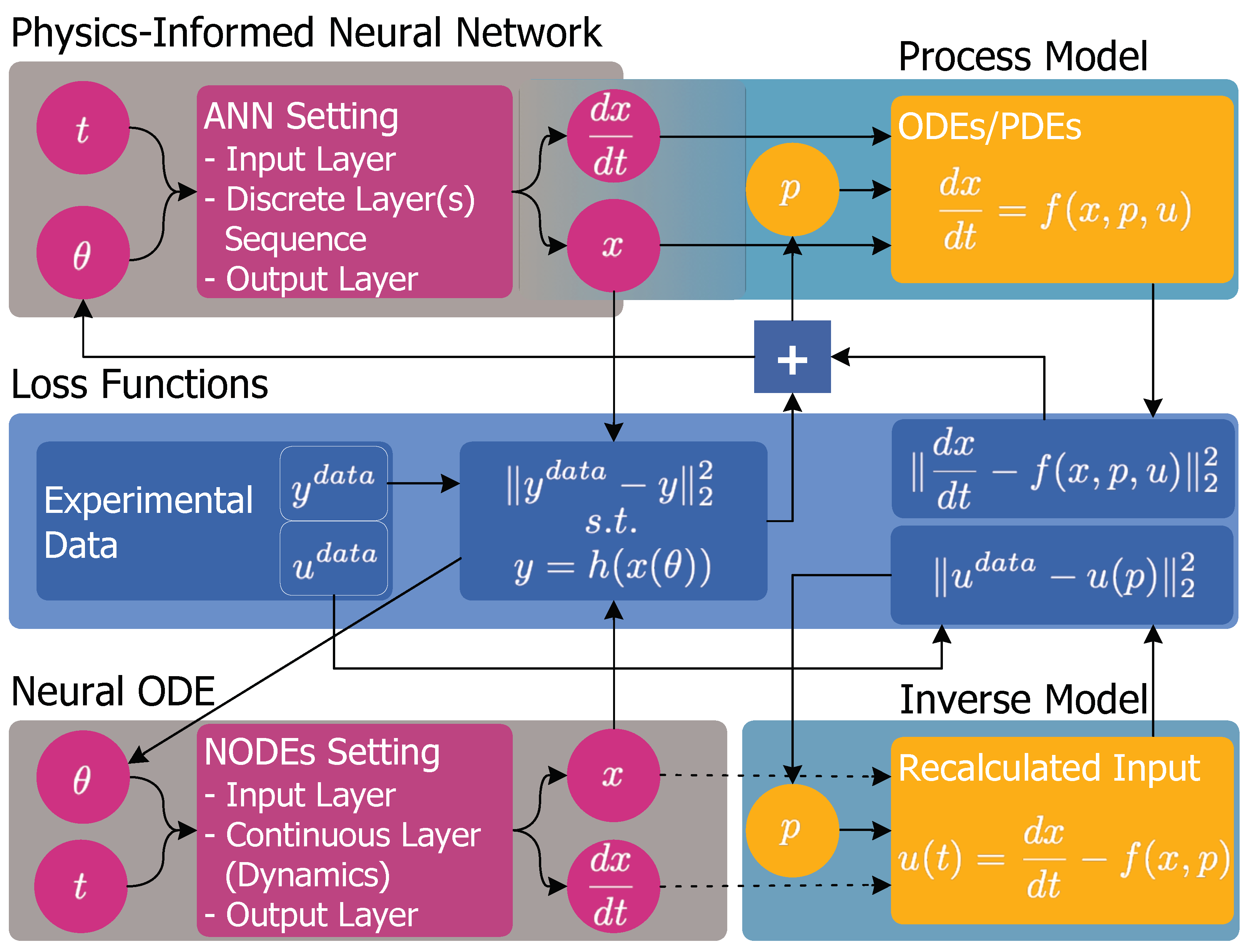
2.3. Empirical Output Function: Neural Ordinary Differential Equations
3. Case Study
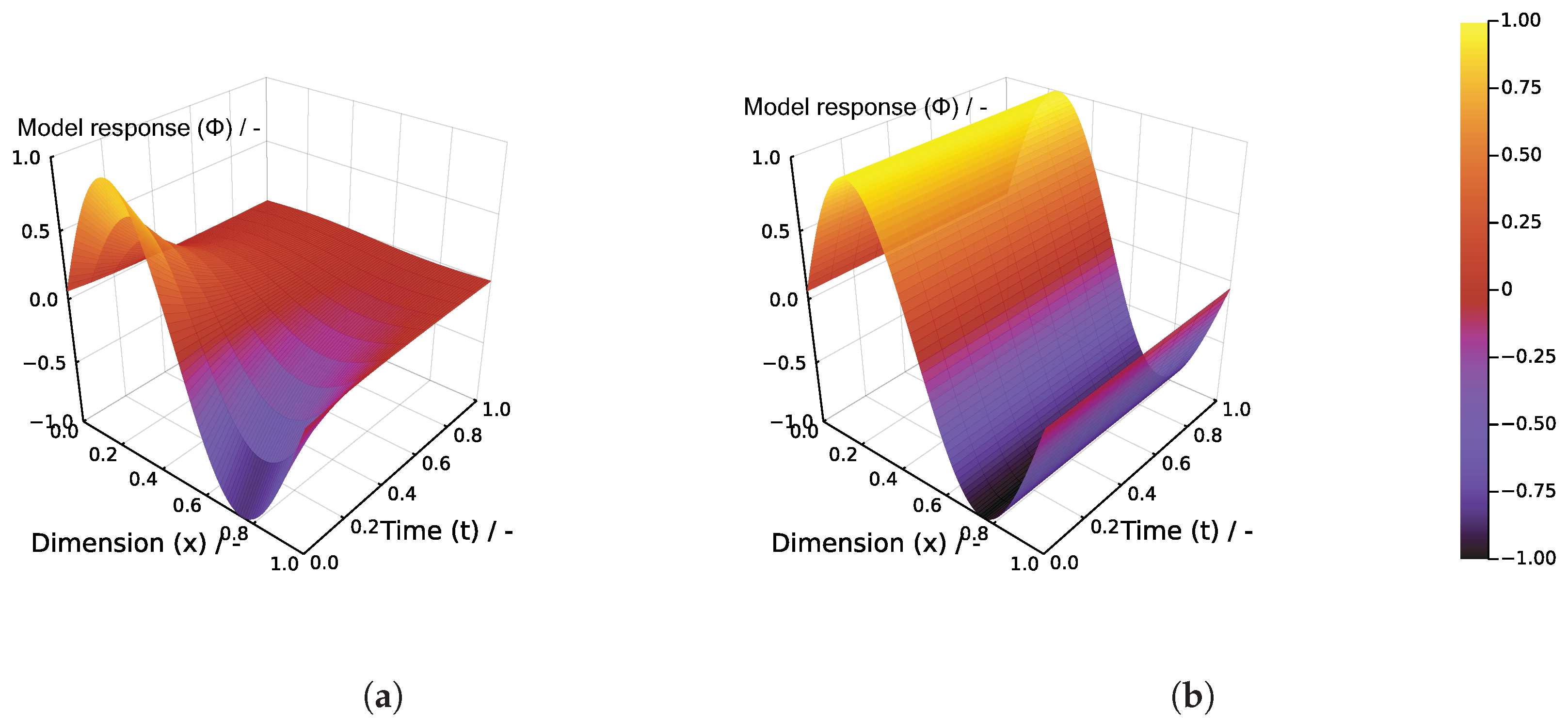
3.1. Scenario 1: Distributed Control Problem
3.2. Scenario 2: Boundary Control Problem
4. Results and Discussion
4.1. Model Inversion via Differential Flatness
4.1.1. Scenario 1: Distributed Control Problem
4.1.2. Scenario 2: Boundary Control Problem
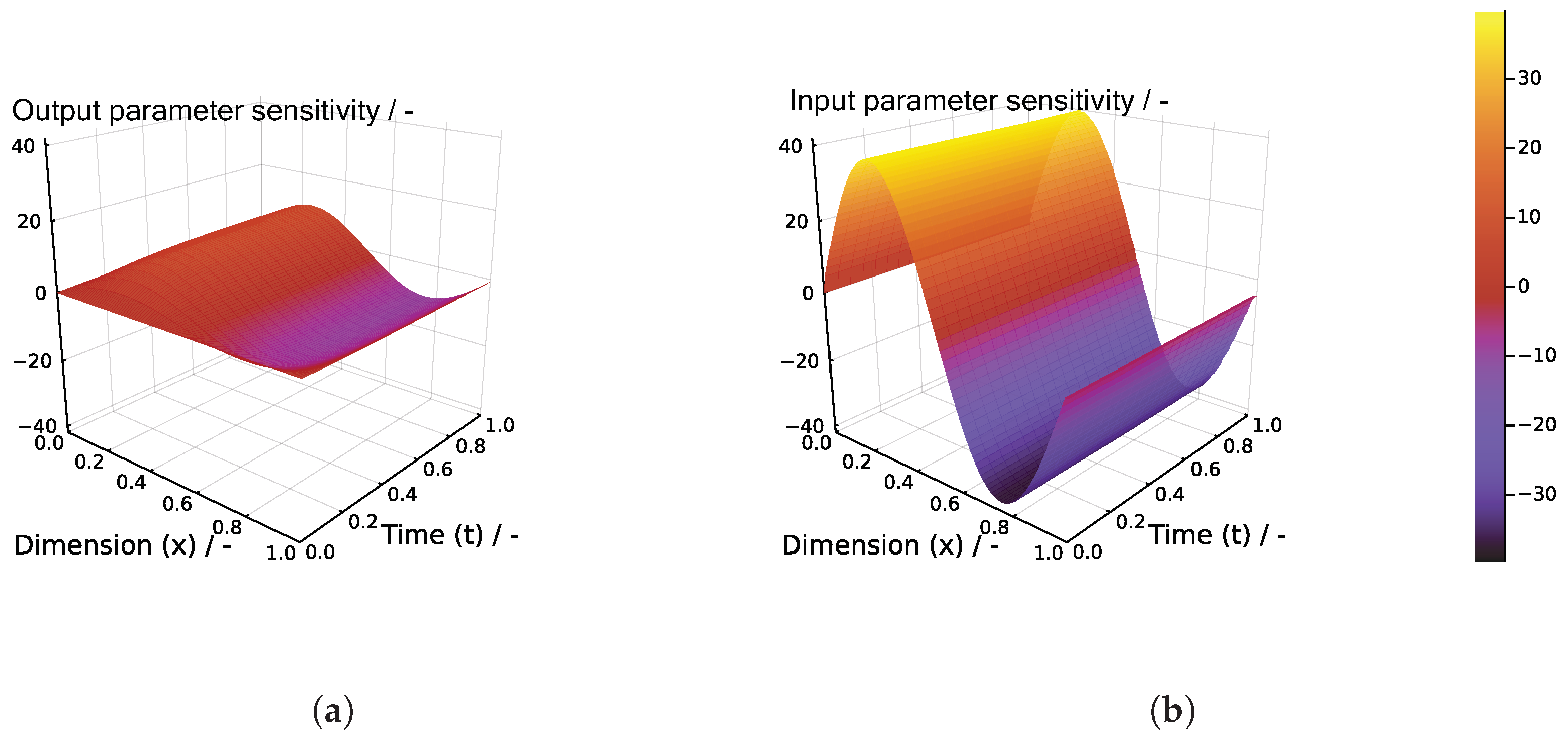
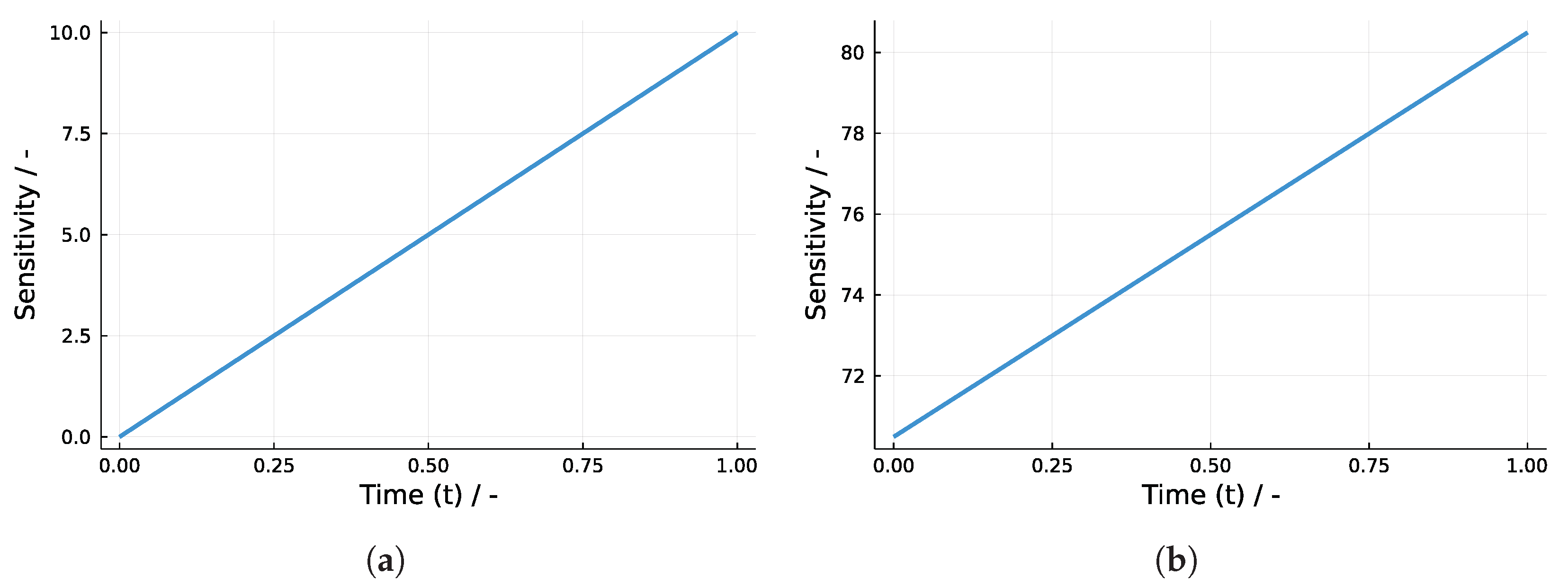
4.2. Sensitivity Analyses
4.2.1. Scenarion 1: Distributed Control Problem
4.2.2. Scenario 2: Boundary Control Problem
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Gernaey, K.V.; Cervera-Padrell, A.E.; Woodley, J.M. A perspective on PSE in pharmaceutical process development and innovation. Comput. Chem. Eng. 2012, 42, 15–29. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, O.; Sampat, C.; Bhalode, P.; Ramachandran, R.; Ierapetritou, M. Digital Twins in Pharmaceutical and Biopharmaceutical Manufacturing: A Literature Review. Processes 2020, 8, 1088. [Google Scholar] [CrossRef]
- Udugama, I.A.; Bayer, C.; Baroutian, S.; Gernaey, K.V.; Yu, W.; Young, B.R. Digitalisation in chemical engineering: Industrial needs, academic best practice, and curriculum limitations. Educ. Chem. Eng. 2022, 39, 94–107. [Google Scholar] [CrossRef]
- Batchu, S.P.; Hernandez, B.; Malhotra, A.; Fang, H.; Ierapetritou, M.; Vlachos, D.G. Accelerating manufacturing for biomass conversion via integrated process and bench digitalization: A perspective. React. Chem. Eng. 2022, 7, 813–832. [Google Scholar] [CrossRef]
- Bonvin, D.; Georgakis, C.; Pantelides, C.; Barolo, M.; Rodrigues, D.; Schneider, R.; Dochain, D.; Grover, M. Linking Models and Experiments. Ind. Eng. Chem. Res. 2016, 55. [Google Scholar] [CrossRef]
- Yang, S.; Navarathna, P.; Ghosh, S.; Bequette, B.W. Hybrid Modeling in the Era of Smart Manufacturing. Comput. Chem. Eng. 2020, 140, 106874. [Google Scholar] [CrossRef]
- Nielsen, R.F.; Nazemzadeh, N.; Sillesen, L.W.; Andersson, M.P.; Gernaey, K.V.; Mansouri, S.S. Hybrid machine learning assisted modelling framework for particle processes. Comput. Chem. Eng. 2020, 140, 106916. [Google Scholar] [CrossRef]
- Chao, M.A.; Kulkarni, C.; Goebel, K.; Fink, O. Fusing physics-based and deep learning models for prognostics. Reliab. Eng. Syst. Saf. 2022, 217, 107961. [Google Scholar] [CrossRef]
- Azadi, P.; Winz, J.; Leo, E.; Klock, R.; Engell, S. A hybrid dynamic model for the prediction of molten iron and slag quality indices of a large-scale blast furnace. Comput. Chem. Eng. 2022, 156, 107573. [Google Scholar] [CrossRef]
- Sharma, N.; Liu, Y.A. A hybrid science-guided machine learning approach for modeling chemical processes: A review. AIChE J. 2022, 68, e17609. [Google Scholar] [CrossRef]
- Razavi, S.; Jakeman, A.; Saltelli, A.; Prieur, C.; Iooss, B.; Borgonovo, E.; Plischke, E.; Lo Piano, S.; Iwanaga, T.; Becker, W.; et al. The Future of Sensitivity Analysis: An Essential Discipline for Systems Modeling and Policy Support. Environ. Model. Softw. 2020, 137, 104954. [Google Scholar] [CrossRef]
- Rudin, C. Stop Explaining Black Box Machine Learning Models for High Stakes Decisions and Use Interpretable Models Instead. Nat. Mach. Intell. 2019, 1, 206–215. [Google Scholar] [CrossRef] [PubMed]
- Samek, W.; Müller, K.R. Towards Explainable Artificial Intelligence; Springer: Cham, Switzerland, 2019; pp. 5–22. [Google Scholar] [CrossRef]
- Bradley, W.; Kim, J.; Kilwein, Z.; Blakely, L.; Eydenberg, M.; Jalvin, J.; Laird, C.; Boukouvala, F. Perspectives on the Integration between First-Principles and Data-Driven Modeling. Comput. Chem. Eng. 2022, in press. [Google Scholar] [CrossRef]
- Bhonsale, S.; Stokbroekx, B.; Van Impe, J. Assessment of the parameter identifiability of population balance models for air jet mills. Comput. Chem. Eng. 2020, 143, 107056. [Google Scholar] [CrossRef]
- Villaverde, A.; Pathirana, D.; Froehlich, F.; Hasenauer, J.; Banga, J. A protocol for dynamic model calibration. Brief. Bioinform. 2021, 23, bbab387. [Google Scholar] [CrossRef]
- Wieland, F.G.; Hauber, A.; Rosenblatt, M.; Tönsing, C.; Timmer, J. On structural and practical identifiability. Curr. Opin. Syst. Biol. 2021, 25, 60–69. [Google Scholar] [CrossRef]
- Walter, E.; Norton, J.; Pronzato, L. Identification of Parametric Models: From Experimental Data; Communications and Control Engineering; Springer: Berlin/Heidelberg, Germany, 1997. [Google Scholar]
- Abt, V.; Barz, T.; Cruz, N.; Herwig, C.; Kroll, P.; Möller, J.; Pörtner, R.; Schenkendorf, R. Model-based tools for optimal experiments in bioprocess engineering. Curr. Opin. Chem. Eng. 2018, 22, 244–252. [Google Scholar] [CrossRef]
- Krausch, N.; Barz, T.; Kemmer, A.; Kamel, S.; Neubauer, P.; Cruz Bournazou, M. Monte Carlo Simulations for the Analysis of Non-linear Parameter Confidence Intervals in Optimal Experimental Design. Front. Bioeng. Biotechnol. 2019, 7, 122. [Google Scholar] [CrossRef]
- Nimmegeers, P.; Bhonsale, S.; Telen, D.; Van Impe, J. Optimal experiment design under parametric uncertainty: A comparison of a sensitivities based approach versus a polynomial chaos based stochastic approach. Chem. Eng. Sci. 2020, 221, 115651. [Google Scholar] [CrossRef]
- Schenkendorf, R.; Xie, X.; Rehbein, M.; Scholl, S.; Krewer, U. The Impact of Global Sensitivities and Design Measures in Model-Based Optimal Experimental Design. Processes 2018, 6, 27. [Google Scholar] [CrossRef]
- Francis-Xavier, F.; Kubannek, F.; Schenkendorf, R. Hybrid Process Models in Electrochemical Syntheses under Deep Uncertainty. Processes 2021, 9, 704. [Google Scholar] [CrossRef]
- Barz, T.; López, C.D.; Cruz Bournazou, M.; Körkel, S.; Walter, S. Real-time adaptive input design for the determination of competitive adsorption isotherms in liquid chromatography. Comput. Chem. Eng. 2016, 94, 104–116. [Google Scholar] [CrossRef]
- Bhatt, N.; Kerimoglu, N.; Amrhein, M.; Marquardt, W.; Bonvin, D. Incremental Identification of Reaction Systems—A Comparison between Rate-based and Extent-based Approaches. Chem. Eng. Sci. 2012, 83, 24–38. [Google Scholar] [CrossRef]
- Poyton, A.; Varziri, M.; McAuley, K.; Mclellan, P.; Ramsay, J. Parameter Estimation in Continuous-Time Dynamic Models Using Principal Differential Analysis. Comput. Chem. Eng. 2006, 30, 698–708. [Google Scholar] [CrossRef]
- Varziri, M.; Poyton, A.; McAuley, K.; McLellan, P.; Ramsay, J. Selecting optimal weighting factors in iPDA for parameter estimation in continuous-time dynamic models. Comput. Chem. Eng. 2008, 32, 3011–3022. [Google Scholar] [CrossRef]
- Schenkendorf, R.; Mangold, M. Parameter Identification for Ordinary and Delay Differential Equations by Using Flat Inputs. Theor. Found. Chem. Eng. 2014, 48, 594–607. [Google Scholar] [CrossRef]
- Liu, J.; Mendoza, S.; Li, G.; Fathy, H. Efficient Total Least Squares State and Parameter Estimation for Differentially Flat Systems. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 5419–5424. [Google Scholar] [CrossRef]
- Fliess, M.; Lévine, J.; Martin, P.; Rouchon, P. Flatness and defect of non-linear systems: Introductory theory and examples. Int. J. Control 1995, 61, 13–27. [Google Scholar] [CrossRef]
- Rigatos, G.G. Nonlinear Control and Filtering Using Differential Flatness Approaches; Springer: Cham, Switzerland, 2015. [Google Scholar]
- Liu, J.; Li, G.; Fathy, H. A Computationally Efficient Approach for Optimizing Lithium-Ion Battery Charging. J. Dyn. Syst. Meas. Control. 2015, 138, 021009. [Google Scholar] [CrossRef]
- Blechschmidt, J.; Ernst, O.G. Three ways to solve partial differential equations with neural networks—A review. GAMM-Mitteilungen 2021, 44, e202100006. [Google Scholar] [CrossRef]
- Markidis, S. The Old and the New: Can Physics-Informed Deep-Learning Replace Traditional Linear Solvers? arXiv 2021, arXiv:2103.09655. [Google Scholar] [CrossRef]
- Raissi, M.; Perdikaris, P.; Karniadakis, G. Physics-Informed Neural Networks: A Deep Learning Framework for Solving Forward and Inverse Problems Involving Nonlinear Partial Differential Equations. J. Comput. Phys. 2018, 378, 686–707. [Google Scholar] [CrossRef]
- Yazdani, A.; Lu, L.; Raissi, M.; Karniadakis, G.E. Systems biology informed deep learning for inferring parameters and hidden dynamics. PLoS Comput. Biol. 2020, 16, e1007575. [Google Scholar] [CrossRef]
- Yang, L.; Meng, X.; Karniadakis, G.E. B-PINNs: Bayesian physics-informed neural networks for forward and inverse PDE problems with noisy data. J. Comput. Phys. 2021, 425, 109913. [Google Scholar] [CrossRef]
- Zubov, K.; McCarthy, Z.; Ma, Y.; Calisto, F.; Pagliarino, V.; Azeglio, S.; Bottero, L.; Luján, E.; Sulzer, V.; Bharambe, A.; et al. NeuralPDE: Automating Physics-Informed Neural Networks (PINNs) with Error Approximations. arXiv 2021, arXiv:2107.09443. [Google Scholar] [CrossRef]
- Chen, R.T.Q.; Rubanova, Y.; Bettencourt, J.; Duvenaud, D. Neural Ordinary Differential Equations. arXiv 2018, arXiv:1806.07366. [Google Scholar] [CrossRef]
- Kaiser, E.; Kutz, J.N.; Brunton, S.L. Data-driven approximations of dynamical systems operators for control. arXiv 2019, arXiv:1902.10239. [Google Scholar] [CrossRef]
- Champion, K.; Lusch, B.; Kutz, J.N.; Brunton, S.L. Data-driven discovery of coordinates and governing equations. Proc. Natl. Acad. Sci. USA 2019, 116, 22445–22451. [Google Scholar] [CrossRef]
- Lee, K.; Trask, N.; Stinis, P. Structure-preserving Sparse Identification of Nonlinear Dynamics for Data-driven Modeling. arXiv 2021, arXiv:2109.05364. [Google Scholar] [CrossRef]
- Owoyele, O.; Pal, P. ChemNODE: A neural ordinary differential equations framework for efficient chemical kinetic solvers. Energy AI 2022, 7, 100118. [Google Scholar] [CrossRef]
- Fasel, U.; Kutz, J.N.; Brunton, B.W.; Brunton, S.L. Ensemble-SINDy: Robust sparse model discovery in the low-data, high-noise limit, with active learning and control. Proc. R. Soc. A Math. Phys. Eng. Sci. 2022, 478, 20210904. [Google Scholar] [CrossRef]
- Selvarajan, S.; Tappe, A.; Heiduk, C.; Scholl, S.; Schenkendorf, R. Parameter Identification Concept for Process Models Combining Systems Theory and Deep Learning. Eng. Proc. 2022, 19, 27. [Google Scholar] [CrossRef]
- Bird, R.B.; Stewart, W.E.; Lightfoot, E.N. Transport Phenomena; Number Bd. 1 in Transport Phenomena; Wiley: Hoboken, NJ, USA, 2006. [Google Scholar]
- Schiesser, W. The Numerical Method of Lines: Integration of Partial Differential Equations; Academic Press: Cambridge, MA, USA, 1991. [Google Scholar]
- Schiesser, W.; Griffiths, G. A Compendium of Partial Differential Equation Models; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar] [CrossRef]
- Baranowska, A.; Kamont, Z. Numerical Method of Lines for First Order Partial Differential-Functional Equations. Z. Anal. Ihre Anwend. 2002, 21, 949–962. [Google Scholar] [CrossRef]
- Turányi, T.; Tomlin, A.S. Analysis of Kinetic Reaction Mechanisms; Springer: Berlin/Heidelberg, Germany, 2014; Volume 20. [Google Scholar]
- Baader, F.J.; Althaus, P.; Bardow, A.; Dahmen, M. Demand Response for Flat Nonlinear MIMO Processes using Dynamic Ramping Constraints. arXiv 2022, arXiv:2205.14598. [Google Scholar]
- Meurer, T. Flatness-based trajectory planning for diffusion-reaction systems in a parallelepipedon—A spectral approach. Automatica 2011, 47, 935–949. [Google Scholar] [CrossRef]
- Kater, A.; Meurer, T. Motion planning and tracking control for coupled flexible beam structures. Control. Eng. Pract. 2019, 84, 389–398. [Google Scholar] [CrossRef]
- Meurer, T. Control of Higher–Dimensional PDEs: Flatness and Backstepping Designs; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Meurer, T.; Andrej, J. Flatness-based model predictive control of linear diffusion-convection-reaction processes. In Proceedings of the 2018 IEEE Conference on Decision and Control (CDC), Miami, FL, USA, 17–19 December 2018; pp. 527–532. [Google Scholar] [CrossRef]
- Kolar, B.; Rams, H.; Schlacher, K. Time-optimal flatness based control of a gantry crane. Control Eng. Pract. 2017, 60, 18–27. [Google Scholar] [CrossRef]
- Ge, S.; Lee, T.; Zhu, G. Energy-based robust controller design for multilink flexible robot. Mechatronics 1996, 6, 779–798. [Google Scholar] [CrossRef]
- Rigatos, G. Advanced Models of Neural Networks: Nonlinear Dynamics and Stochasticity in Biological Neurons; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Rudolph, J.; Winkler, J.; Woittennek, F. Flatness Based Control of Distributed Parameter Systems: Examples and Computer Exercises from Various Technological Domains; Shaker Verlag: Düren, Germany, 2003. [Google Scholar]
- Gustineli, M. A survey on recently proposed activation functions for Deep Learning. arXiv 2022, arXiv:2204.02921. [Google Scholar]
- Rackauckas, C.; Innes, M.; Ma, Y.; Bettencourt, J.; White, L.; Dixit, V. DiffEqFlux.jl—A Julia Library for Neural Differential Equations. arXiv 2019, arXiv:1902.02376. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Lee, K.; Parish, E. Parameterized neural ordinary differential equations: Applications to computational physics problems. Proc. R. Soc. A Math. Phys. Eng. Sci. 2021, 477, 20210162. [Google Scholar] [CrossRef]
- Rackauckas, C.; Ma, Y.; Martensen, J.; Warner, C.; Zubov, K.; Supekar, R.; Skinner, D.; Ramadhan, A. Universal Differential Equations for Scientific Machine Learning. arXiv 2020, arXiv:2001.04385. [Google Scholar]
- Massaroli, S.; Poli, M.; Park, J.; Yamashita, A.; Asama, H. Dissecting Neural ODEs. arXiv 2020, arXiv:2002.08071. [Google Scholar] [CrossRef]
- Wang, G.; Briskot, T.; Hahn, T.; Baumann, P.; Hubbuch, J. Estimation of adsorption isotherm and mass transfer parameters in protein chromatography using artificial neural networks. J. Chromatogr. A 2017, 1487, 211–217. [Google Scholar] [CrossRef]
- Polis, M. The Distributed System Parameter Identification Problem: A Survey of Recent Results. IFAC Proc. Vol. 1983, 16, 45–58. [Google Scholar] [CrossRef]
- Gehring, N.; Rudolph, J. An algebraic algorithm for parameter identification in a class of systems described by linear partial differential equations. PAMM 2016, 16, 39–42. [Google Scholar] [CrossRef]
- Grimard, J.; Dewasme, L.; Vande Wouwer, A. A Review of Dynamic Models of Hot-Melt Extrusion. Processes 2016, 4, 19. [Google Scholar] [CrossRef] [Green Version]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Selvarajan, S.; Tappe, A.A.; Heiduk, C.; Scholl, S.; Schenkendorf, R. Process Model Inversion in the Data-Driven Engineering Context for Improved Parameter Sensitivities. Processes 2022, 10, 1764. https://doi.org/10.3390/pr10091764
Selvarajan S, Tappe AA, Heiduk C, Scholl S, Schenkendorf R. Process Model Inversion in the Data-Driven Engineering Context for Improved Parameter Sensitivities. Processes. 2022; 10(9):1764. https://doi.org/10.3390/pr10091764
Chicago/Turabian StyleSelvarajan, Subiksha, Aike Aline Tappe, Caroline Heiduk, Stephan Scholl, and René Schenkendorf. 2022. "Process Model Inversion in the Data-Driven Engineering Context for Improved Parameter Sensitivities" Processes 10, no. 9: 1764. https://doi.org/10.3390/pr10091764