
Threshold Analysis of a Stochastic SIRS Epidemic Model with Logistic Birth and Nonlinear Incidence


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Existence and Uniqueness of the Global Positive Solution
4. Global Stability of Disease-Free Equilibrium
5. Permanence in the Mean of Disease
6. Existence of Stationary Distribution
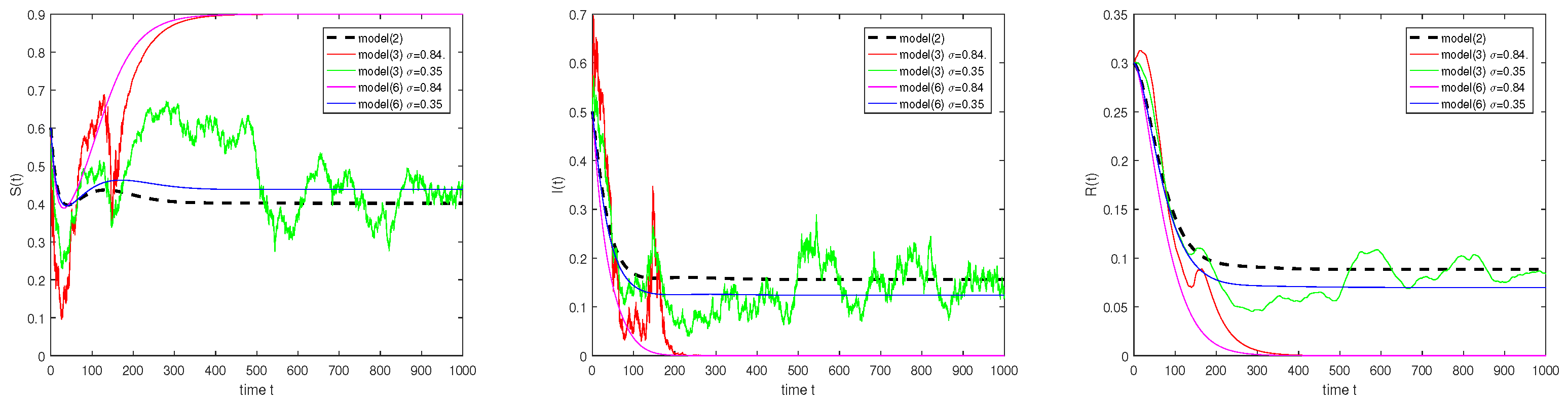
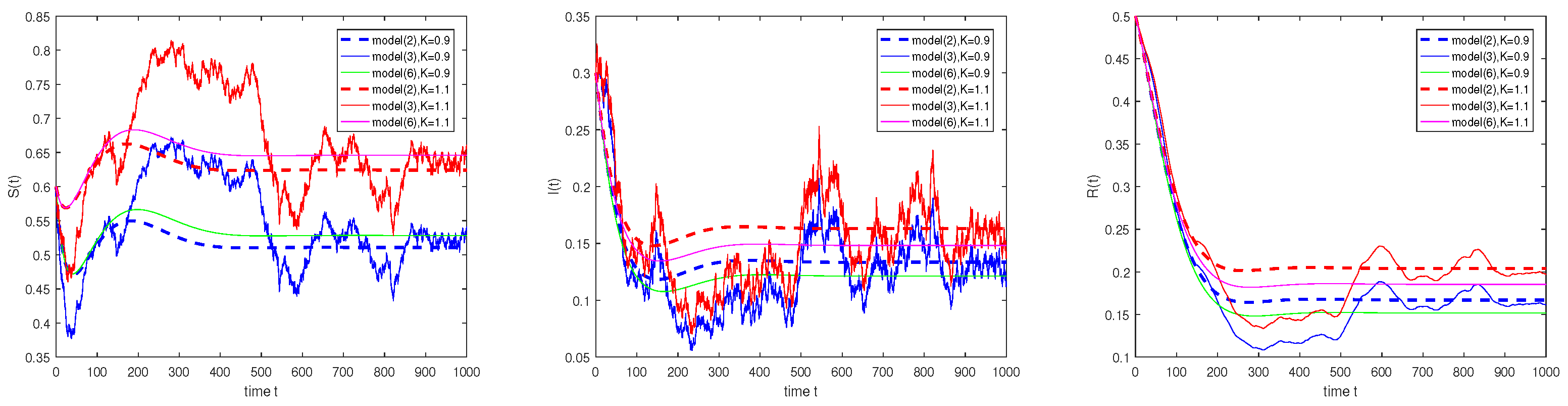
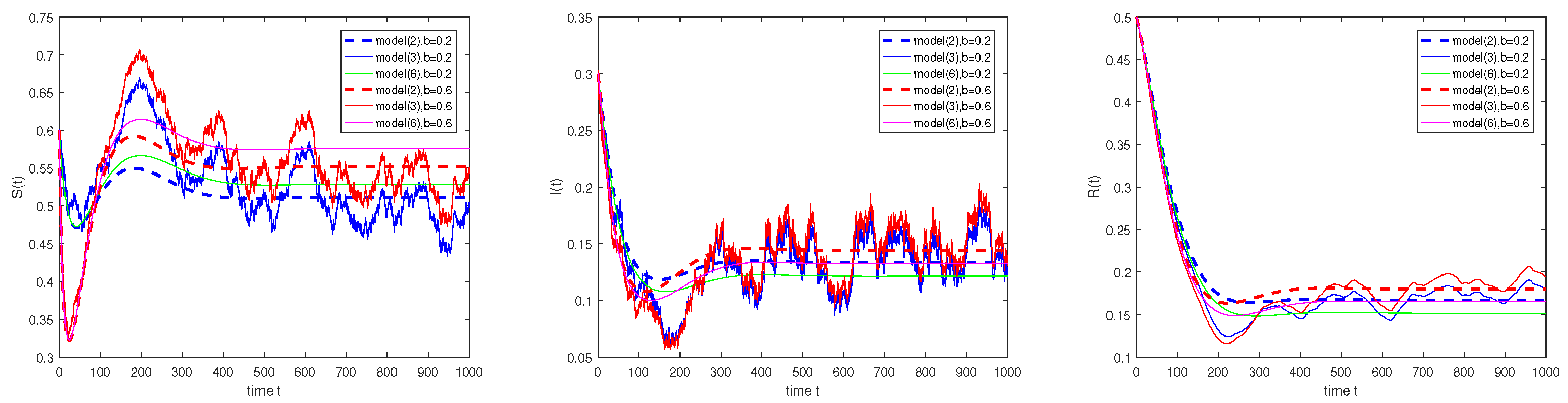
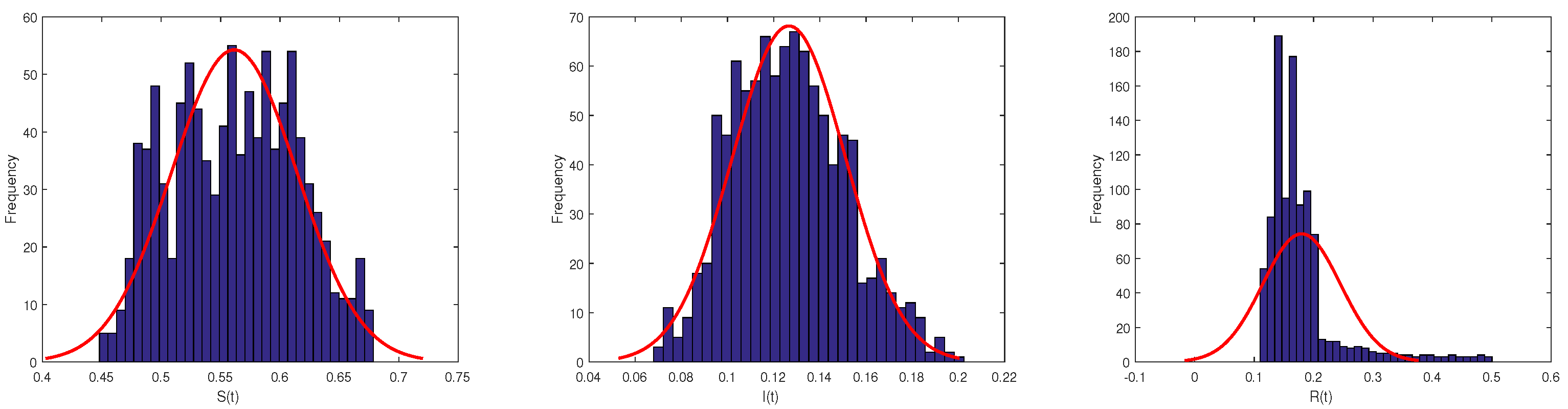
7. Numerical Simulations
8. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Beretta, E.; Takeuchi, Y. Convergence results in SIR epidemic models with varying population sizes. Nonlinear Anal. Theory Methods Appl. 1997, 28, 1909–1921. [Google Scholar] [CrossRef]
- Lu, Z.; Chi, X.; Chen, L. The effect of constant and pulse vaccination on SIR epidemic model with horizontal and vertical transmission. Math. Comput. Model. 2002, 36, 1039–1057. [Google Scholar] [CrossRef]
- Zhang, J.; Li, J.; Ma, Z. Global analysis of SIR epidemic models with population size dependent contact rate. J. Eng. Math. 2004, 21, 259–267. [Google Scholar]
- Ma, Z.; Zhou, Y.; Wu, J. Modeling and Dynamics of Infectious Diseases; World Scientific: Singapore, 2009. [Google Scholar]
- Allen, L.J.; Burgin, A.M. Comparison of deterministic and stochastic SIS and SIR models in discrete time. Math. Biosci. 2000, 163, 1–33. [Google Scholar] [CrossRef] [PubMed]
- Gao, L.Q.; Hethcote, H.W. Disease transmission models with density-dependent demographics. J. Math. Biol. 1992, 30, 717–731. [Google Scholar] [CrossRef] [PubMed]
- Korobeinikov, A. Lyapunov functions and global stability for SIR and SIRS epidemiological models with non-linear transmission. Bull. Math. Biol. 2006, 68, 615–626. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vargas-De-León, C. Constructions of Lyapunov functions for classic SIS, SIR and SIRS epidemic models with variable population size. Foro-Red-Mat: Rev. Electron Conten. Mat. 2009, 26, 1–12. [Google Scholar]
- Lahrouz, A.; Omari, L.; Kiouach, D. Global analysis of a deterministic and stochastic nonlinear SIRS epidemic model. Nonlinear Anal. 2011, 16, 59–76. [Google Scholar] [CrossRef] [Green Version]
- Li, D.; Cui, J.; Liu, M.; Liu, S. The evolutionary dynamics of stochastic epidemic model with nonlinear incidence rate. Bull. Math. Biol. 2015, 77, 1705–1743. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Song, Y.; Miao, A.; Zhang, T.; Wang, X.; Liu, J. Extinction and persistence of a stochastic SIRS epidemic model with saturated incidence rate and transfer from infectious to susceptible. Adv. Differ. Equ. 2018, 2018, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Jiang, D.; Hayat, T.; Alsaedi, A.; Ahmad, B. A stochastic SIRS epidemic model with logistic growth and general nonlinear incidence rate. Physica A 2020, 551, 124152. [Google Scholar] [CrossRef]
- He, X.; Wei, Y. Dynamics of a Class of Stochastic SIRS Infectious Disease Models With Both Logistic Birth and Markov. Appl. Math. Mech. 2021, 42, 1327–1337. [Google Scholar]
- Mao, X. Stochastic Differential Equations and Applications; Horwood Publishing: Chichester, UK, 2007. [Google Scholar]
- Braumann, C.A. Introduction to Stochastic Differential Equations with Applications to Modelling in Biology and Finance; John Wiley & Sons: Hoboken, NJ, USA, 2019. [Google Scholar]
- Rifhat, R.; Muhammadhaji, A.; Teng, Z. Asymptotic properties of a stochastic SIRS epidemic model with nonlinear incidence and varying population sizes. Dynam. Syst. 2020, 35, 56–80. [Google Scholar] [CrossRef]
- Cai, Y.; Kang, Y.; Wang, W. A stochastic SIRS epidemic model with nonlinear incidence rate. Appl. Math. Comput. 2017, 305, 221–240. [Google Scholar] [CrossRef] [Green Version]
- Khasminskii, R. Stochastic Stability of Differential Equations; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Liptser, R.S. A strong law of large numbers for local martingales. Stochastics 1980, 3, 217–228. [Google Scholar] [CrossRef]
- Higham, D.J. An algorithmic introduction to numerical simulation of stochastic differential equations. SIAM Rev. 2001, 43, 525–546. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Zhang, G.; Chen, T.; Li, Z. Threshold Analysis of a Stochastic SIRS Epidemic Model with Logistic Birth and Nonlinear Incidence. Mathematics 2023, 11, 1737. https://doi.org/10.3390/math11071737
Wang H, Zhang G, Chen T, Li Z. Threshold Analysis of a Stochastic SIRS Epidemic Model with Logistic Birth and Nonlinear Incidence. Mathematics. 2023; 11(7):1737. https://doi.org/10.3390/math11071737
Chicago/Turabian StyleWang, Huyi, Ge Zhang, Tao Chen, and Zhiming Li. 2023. "Threshold Analysis of a Stochastic SIRS Epidemic Model with Logistic Birth and Nonlinear Incidence" Mathematics 11, no. 7: 1737. https://doi.org/10.3390/math11071737