
An In-Phase Unit Slot-Opening Shift Method for Cogging Torque Reduction in Interior Permanent Magnet Machine


Abstract
:1. Introduction
2. The Proposed IPU-Based Slot-Opening Shift Method
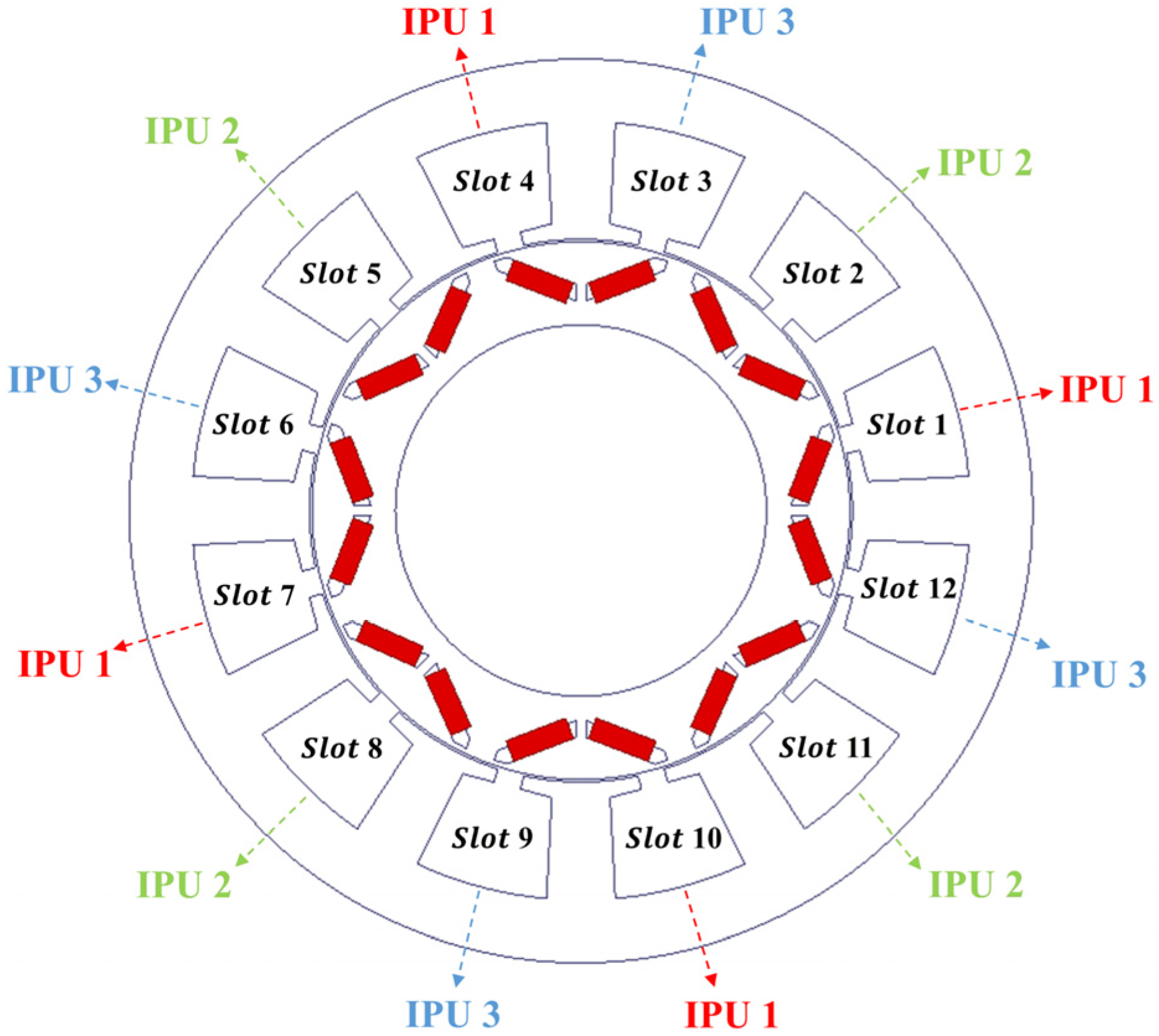
2.1. The Introduction of IPU
2.2. The Proposed IPU Slot-Opening Shift
2.3. Screening for the Right Harmonic Orders to Cancel
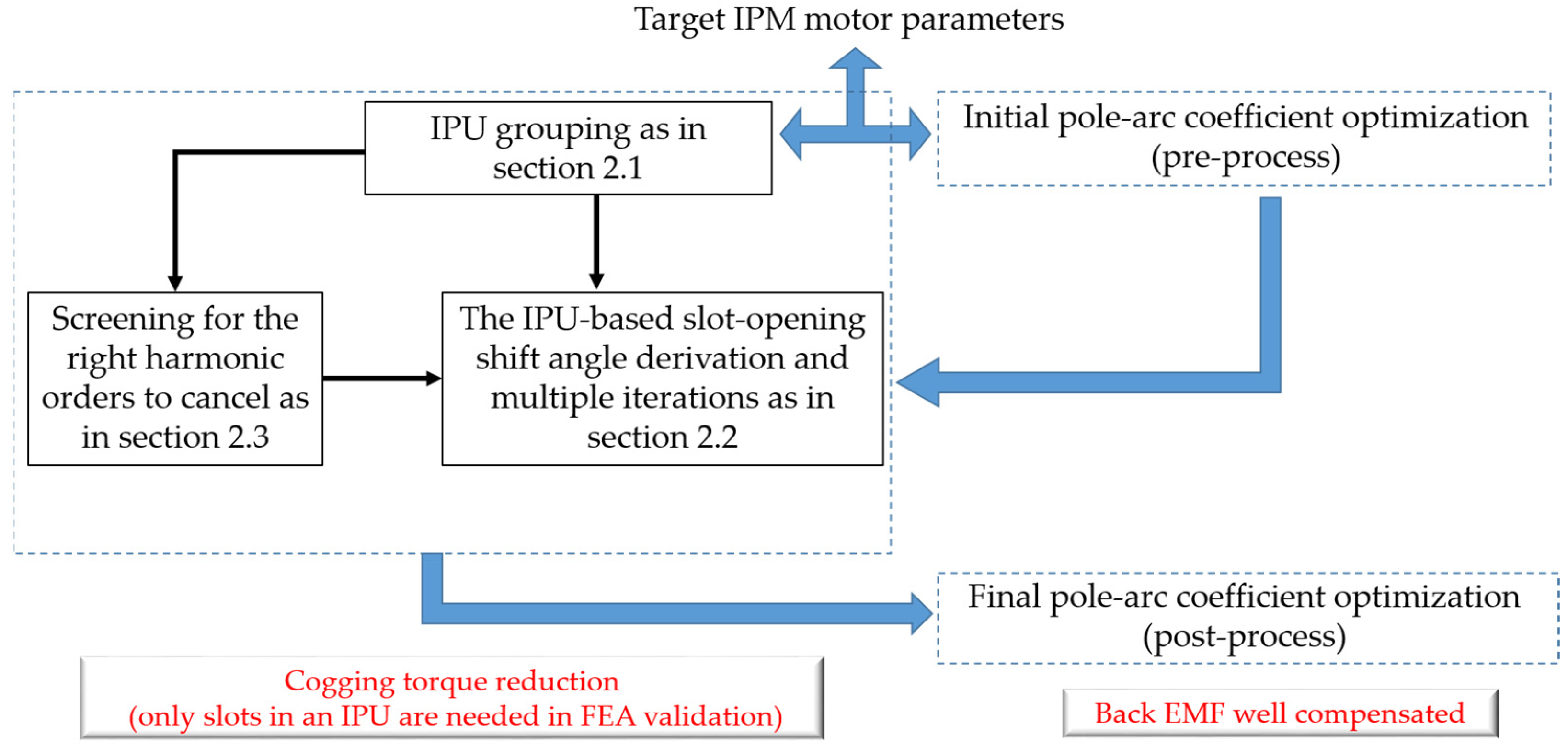
2.4. The Complete Cogging Torque Reduction Process
2.4.1. Initial Pole-Arc Coefficient Optimization
2.4.2. Final Pole-Arc Coefficient Optimization
3. Numerical Analysis Case Studies
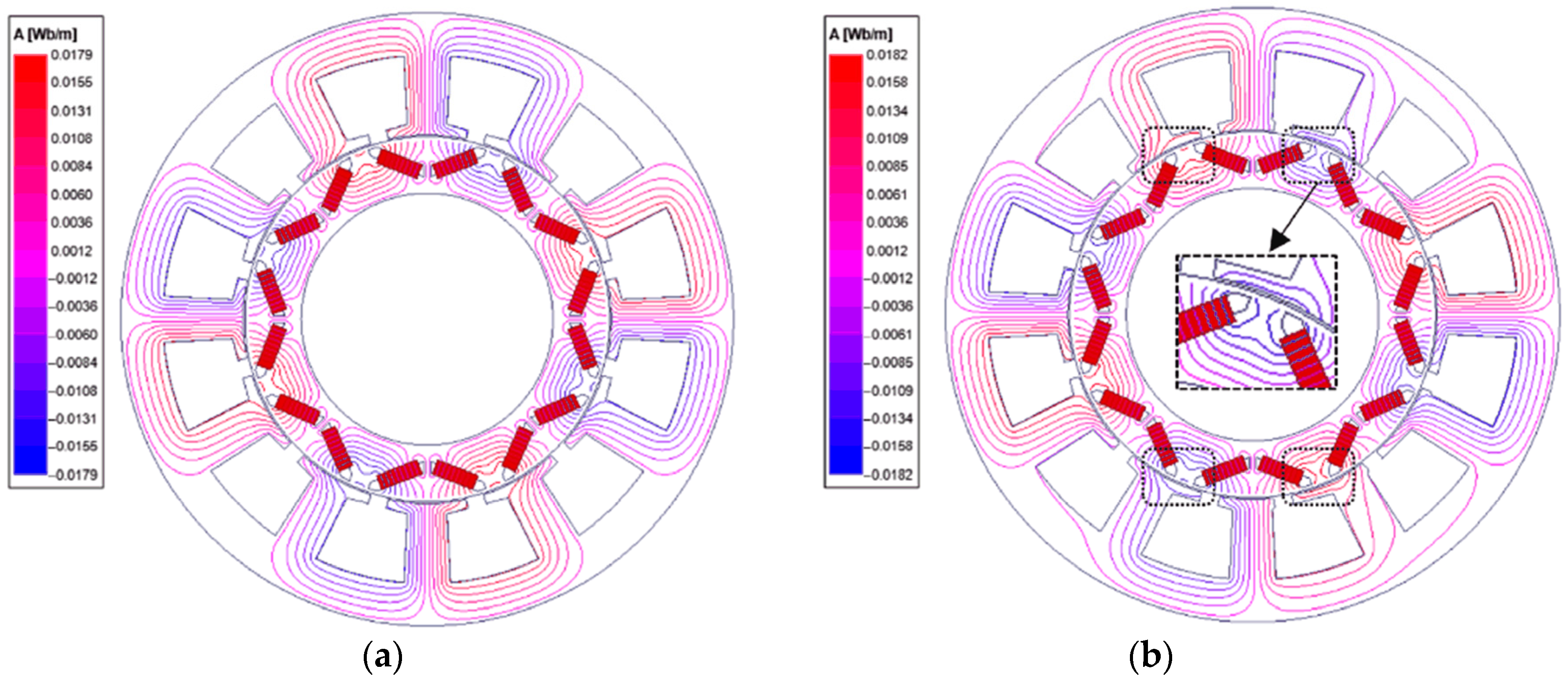
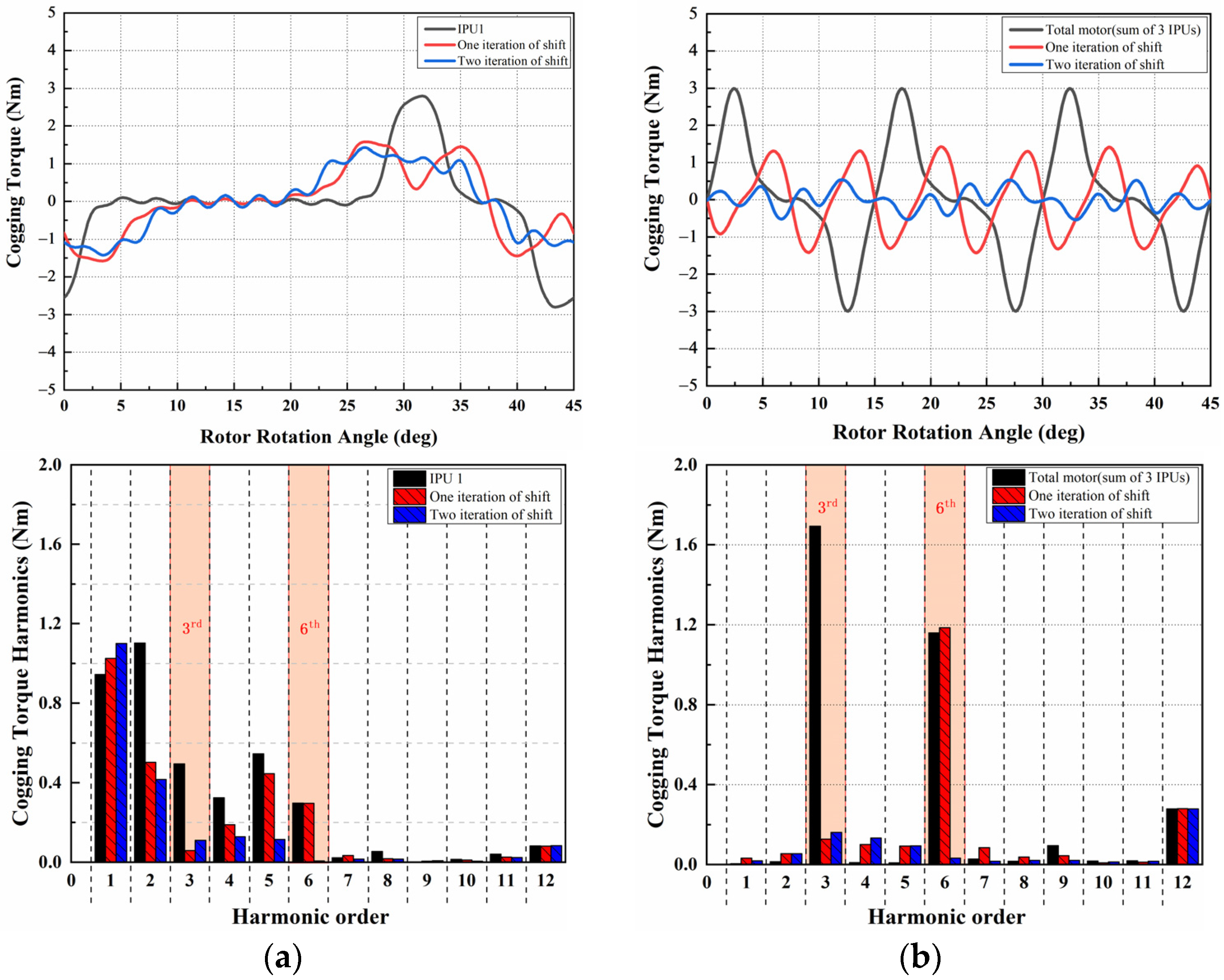
3.1. The Cogging Torque Reduction
3.2. Back-EMF Compensation
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fei, W.; Luk, P.C.K. A New Technique of Cogging Torque Suppression in Direct-Drive Permanent-Magnet Brushless Machines. IEEE Trans. Ind. Appl. 2010, 46, 1332–1340. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Xiang, Z.M.; Dai, L.T.; Huang, S.D.; Ni, D.C.; Yao, C. Cogging Torque Dynamic Reduction Based on Harmonic Torque Counteract. IEEE Trans. Magn. 2022, 58, 1–5. [Google Scholar] [CrossRef]
- Breton, C.; Bartolome, J.; Benito, J.A.; Tassinario, G.; Flotats, I.; Lu, C.W.; Chalmers, B.J. Influence of machine symmetry on reduction of cogging torque in permanent-magnet brushless motors. IEEE Trans. Magn. 2000, 36, 3819–3823. [Google Scholar] [CrossRef]
- Bianchi, N.; Bolognani, S. Design techniques for reducing the cogging torque in surface-mounted PM motors. IEEE Trans. Ind. Appl. 2002, 38, 1259–1265. [Google Scholar] [CrossRef]
- Qu, C.Y.; Guo, Z.Q.; Hu, Y.Z.; Wang, X.P.; Han, F.X. Multi-Objective Optimization Design of a New Permanent Magnet Synchronous Motor Based on the Taguchi Method. Energies 2022, 15, 7347. [Google Scholar] [CrossRef]
- Koh, C.S.; Seol, J.S. New cogging-torque reduction method for brushless permanent-magnet motors. IEEE Trans. Magn. 2003, 39, 3503–3506. [Google Scholar]
- Wang, D.H.; Wang, X.H.; Qiao, D.W.; Pei, Y.; Jung, S.Y. Reducing Cogging Torque in Surface-Mounted Permanent-Magnet Motors by Nonuniformly Distributed Teeth Method. IEEE Trans. Magn. 2011, 47, 2231–2239. [Google Scholar] [CrossRef]
- Bianchini, C.; Immovilli, F.; Lorenzani, E.; Bellini, A.; Davoli, M. Review of Design Solutions for Internal Permanent-Magnet Machines Cogging Torque Reduction. IEEE Trans. Magn. 2012, 48, 2685–2693. [Google Scholar] [CrossRef]
- Ozoglu, Y.; Garip, M.; Mese, E. New pole tip shapes mitigating torque ripple inshort pitched and fully pitched switched reluctance motors. Electr. Power Syst. Res. 2005, 74, 95–103. [Google Scholar] [CrossRef]
- Wang, D.H.; Wang, X.H.; Jung, S.Y. Cogging Torque Minimization and Torque Ripple Suppression in Surface-Mounted Permanent Magnet Synchronous Machines Using Different Magnet Widths. IEEE Trans. Magn. 2013, 49, 2295–2298. [Google Scholar] [CrossRef]
- Zhang, J.; Cheng, M.; Chen, Z. Optimal design of stator interior permanent magnet machine with minimized cogging torque for wind power application. Energy Convers. Manag. 2008, 49, 2100–2105. [Google Scholar] [CrossRef]
- Hasanien, H.M. Torque ripple minimization of permanent magnet synchronous motor using digital observer controller. Energy Convers. Manag. 2010, 51, 98–104. [Google Scholar] [CrossRef]
- Caruso, M.; Di Tommaso, A.O.; Miceli, R.; Viola, F. A Cogging Torque Minimization Procedure for Interior Permanent Magnet Synchronous Motors Based on a Progressive Modification of the Rotor Lamination Geometry. Energies 2022, 15, 4956. [Google Scholar] [CrossRef]
- Caruso, M.; Di Tommaso, A.O.; Miceli, R.; Schettino, G.; Viola, F. A Cogging Torque Minimization Procedure for IPMSMs based on Different Laminate Geometry. In Proceedings of the 2016 Eleventh International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 6–8 April 2016. [Google Scholar]
- Ren, W.; Xu, Q.; Li, Q.; Zhou, L.B. Reduction of Cogging Torque and Torque Ripple in Interior PM Machines with Asymmetrical V-Type Rotor Design. IEEE Trans. Magn. 2016, 52, 1–5. [Google Scholar] [CrossRef]
- Wan, X.B.; Yang, S.; Li, Y.C.; Shi, Y.; Lou, J.Y. Minimization of Cogging Torque for V-Type IPMSM by the Asymmetric Auxiliary Slots on the Rotor. IEEE Access 2022, 10, 89428–89436. [Google Scholar] [CrossRef]
- Kang, G.H.; Son, Y.D.; Kim, G.T.; Hur, J. A Novel Cogging Torque Reduction Method for Interior-Type Permanent-Magnet Motor. IEEE Trans. Ind. Appl. 2009, 45, 161–167. [Google Scholar] [CrossRef]
- Gao, J.; Wang, G.; Liu, X.; Zhang, W.J.; Huang, S.D.; Li, H.M. Cogging Torque Reduction by Elementary-Cogging-Unit Shift for Permanent Magnet Machines. IEEE Trans. Magn. 2017, 53, 8208705. [Google Scholar] [CrossRef]
- Dosiek, L.; Pillay, P. Cogging torque reduction in permanent magnet machines. IEEE Trans. Ind. Appl. 2007, 43, 1565–1571. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.C.; Wang, J.; Zhou, L.B.; Huang, W.H.; Ma, Y.M.; Zhang, Z.W. Cogging Torque Reduction by Stepped Slot-Opening Shift for Interior Permanent Magnet Motors. In Proceedings of the 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August 2019. [Google Scholar]
- Hwang, S.M.; Eom, J.B.; Jung, Y.H.; Lee, D.W.; Kang, B.S. Various design techniques to reduce cogging torque by controlling energy variation in permanent magnet motors. IEEE Trans. Magn. 2001, 37, 2806–2809. [Google Scholar] [CrossRef]
- Hwang, S.M.; Eom, J.B.; Hwang, G.B.; Jeong, W.B.; Jung, Y.H. Cogging torque and acoustic noise reduction in permanent magnet motors by teeth pairing. IEEE Trans. Magn. 2000, 36, 3144–3146. [Google Scholar] [CrossRef] [Green Version]
- Abbaszadeh, K.; Jafari, M. Optimizing cogging torque reduction in slot opening shift method for BLDC motor by RSM. In Proceedings of the 2011 2nd Power Electronics, Drive Systems and Technologies Conference, Tehran, Iran, 16–17 February 2011. [Google Scholar]
- Liu, T.; Huang, S.D.; Gao, J.; Lu, K.Y. Cogging Torque Reduction by Slot-Opening Shift for Permanent Magnet Machines. IEEE Trans. Magn. 2013, 49, 4028–4031. [Google Scholar] [CrossRef]
- Hanselman, D. Brushless Permanent-Magnet Motor Design; McGraw: New York, NY, USA, 1994. [Google Scholar]
- Zhu, Z.Q.; Ruangsinchaiwanich, S.; Schofield, N.; Howe, D. Reduction of cogging torque in interior-magnet brushless machines. IEEE Trans. Magn. 2003, 39, 3238–3240. [Google Scholar] [CrossRef] [Green Version]
- Qu, R.H.; Lipo, T.A. Analysis and modeling of air-gap and zigzag leakage fluxes in a surface-mounted permanent-magnet machine. IEEE Trans. Ind. Appl. 2004, 40, 121–127. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | 8P12S | 10P12S |
|---|---|---|
| Outer diameter of stator (mm), | 269.24 | 269.24 |
| Inner diameter of stator (mm), | 161.9 | 161.9 |
| Outer diameter of rotor (mm), | 160.4 | 160.4 |
| Inner diameter of rotor (mm), | 110.64 | 110.64 |
| Machine active length (mm), | 83.82 | 83.82 |
| Rated/peak power (kW) @1200 rpm, | 33/50 | 33/50 |
| Rated/peak torque (Nm) with MTPA, | 264/400 | 264/400 |
| Rated/peak current RMS vaule (A), | 127/212 | 127/212 |
| Maximum speed (r/min), | 6000 | 6000 |
| Air-gap length (mm), | 0.75 | 0.75 |
| Magnet width (mm), | 19 | 14 |
| Magnet thickness (mm), | 6.48 | 6.48 |
| Pole-arc coefficient, | 0.67 | 0.58 |
| Slot-opening coefficient, | 0.19 | 0.09 |
| Magnet remanence (T), | 1.191 | 1.191 |
| Magnet relative permeability, | 1.03 | 1.03 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Lu, S.; Chen, Y.; Wang, S. An In-Phase Unit Slot-Opening Shift Method for Cogging Torque Reduction in Interior Permanent Magnet Machine. Mathematics 2023, 11, 1735. https://doi.org/10.3390/math11071735
Wang L, Lu S, Chen Y, Wang S. An In-Phase Unit Slot-Opening Shift Method for Cogging Torque Reduction in Interior Permanent Magnet Machine. Mathematics. 2023; 11(7):1735. https://doi.org/10.3390/math11071735
Chicago/Turabian StyleWang, Linwei, Shuai Lu, Yangming Chen, and Shiya Wang. 2023. "An In-Phase Unit Slot-Opening Shift Method for Cogging Torque Reduction in Interior Permanent Magnet Machine" Mathematics 11, no. 7: 1735. https://doi.org/10.3390/math11071735