
Resonance Analysis of Horizontal Nonlinear Vibrations of Roll Systems for Cold Rolling Mills under Double-Frequency Excitations

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
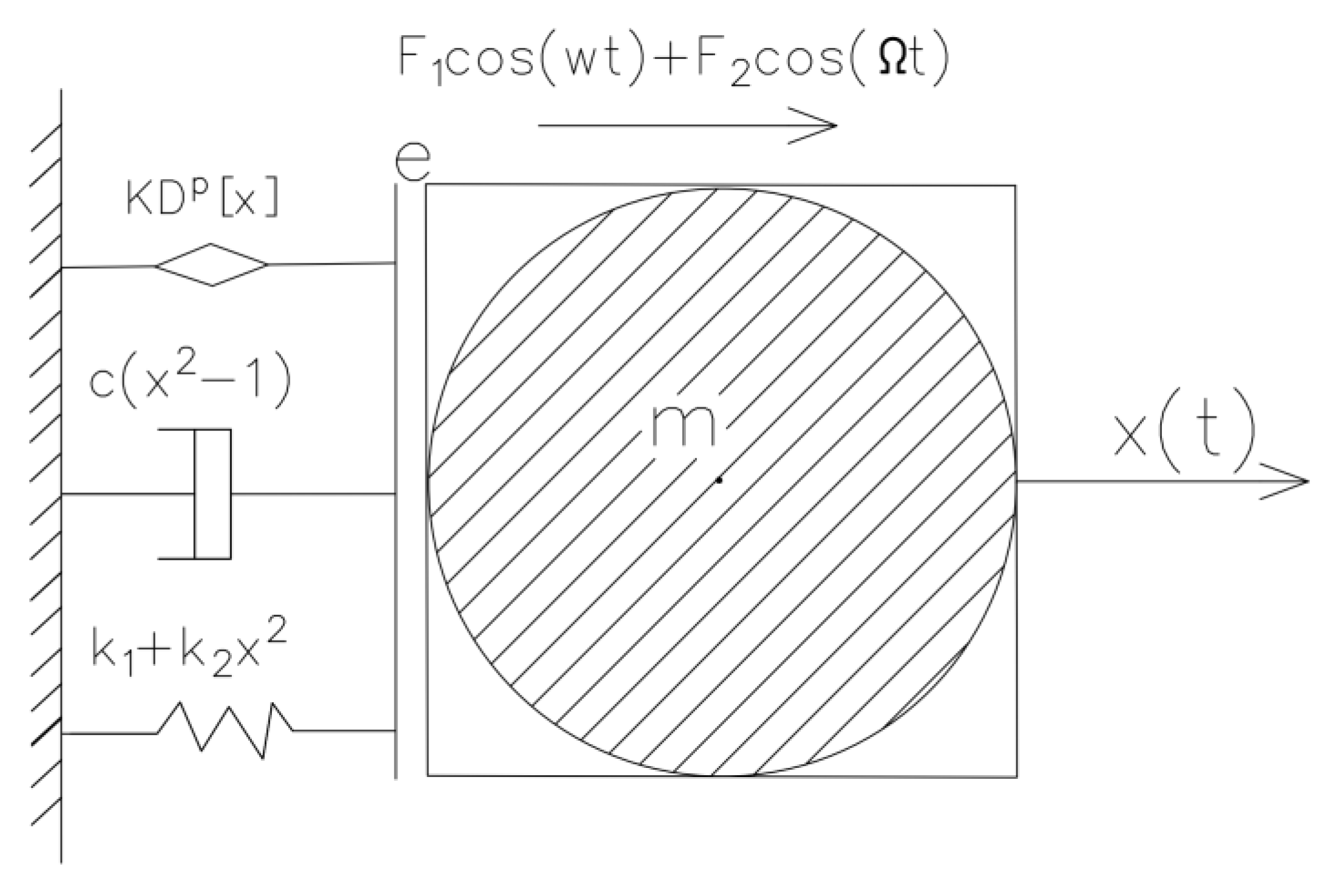
2. Horizontal Nonlinear Equation of the Roller System
3. Bifurcation and Vibration Resonance
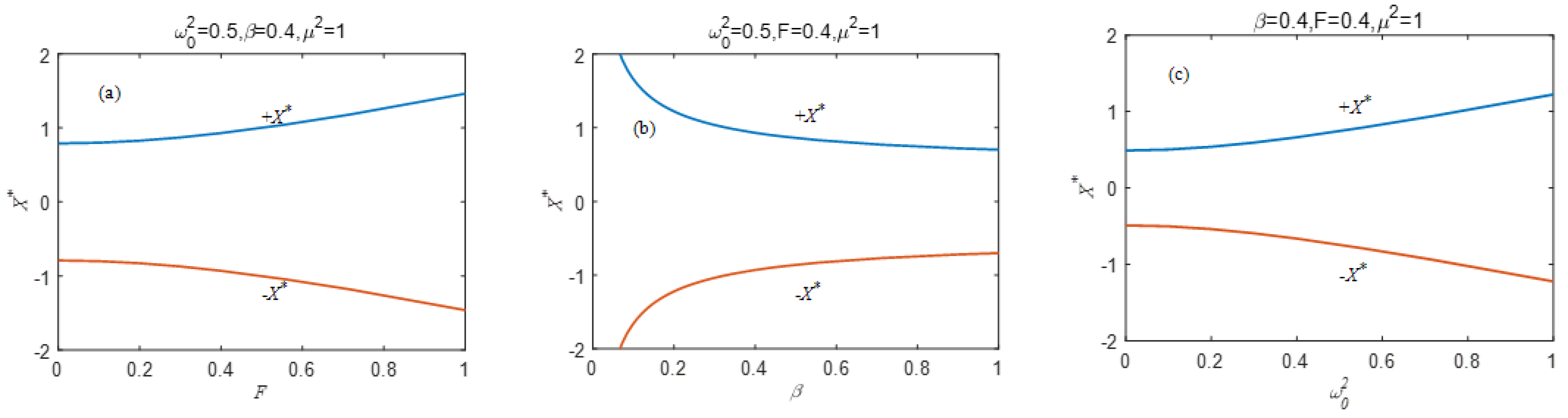
3.1. Pitchfork Bifurcation
3.2. Vibration Resonance
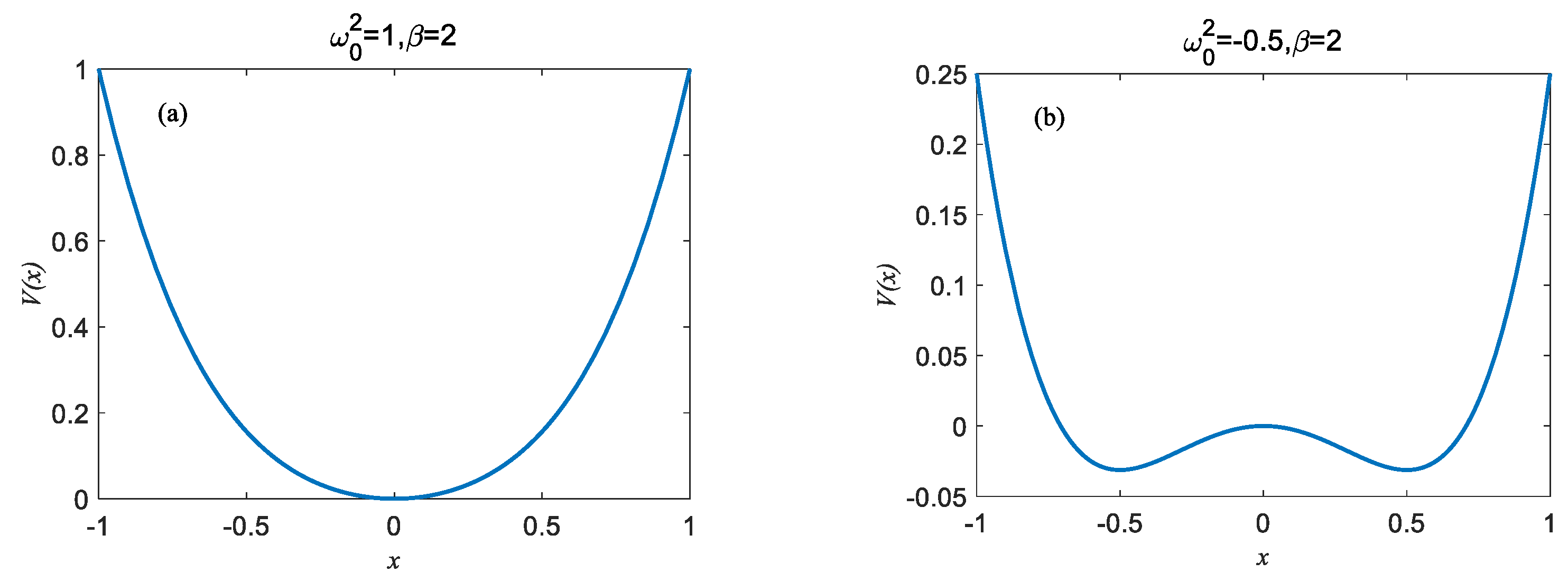
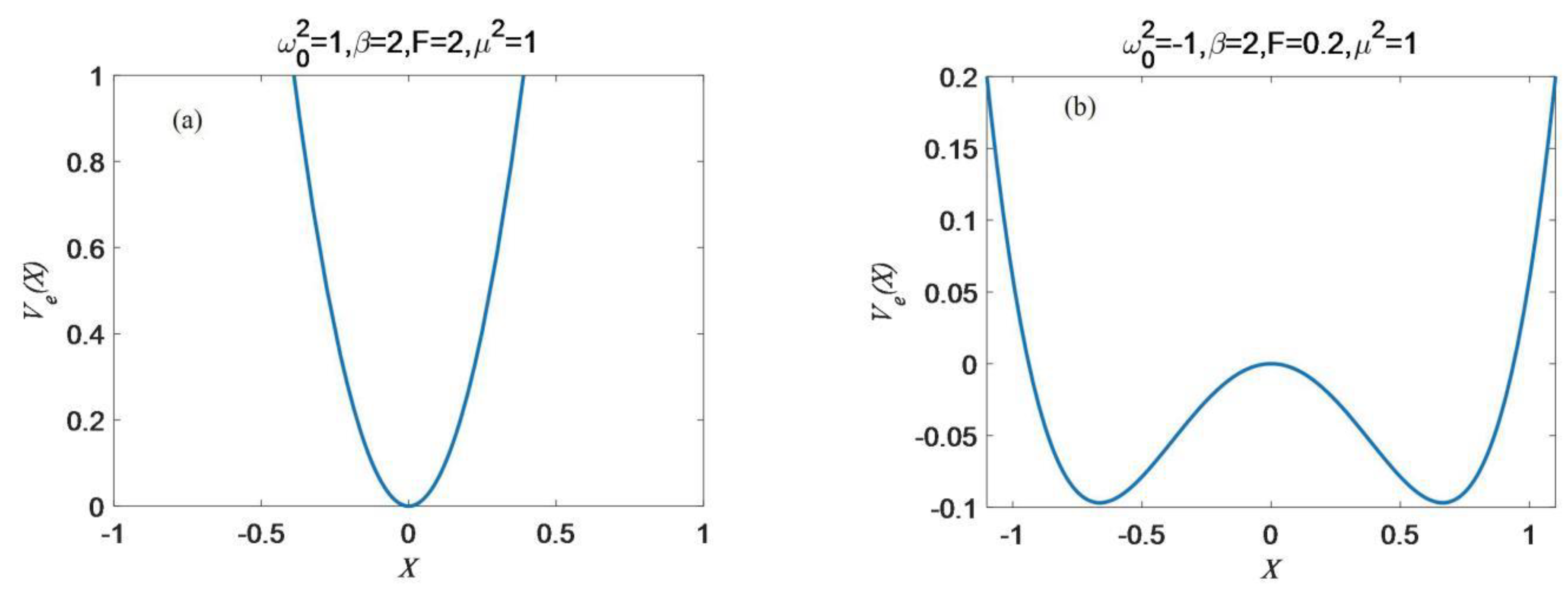
4. Single-well and Double-well Systems
4.1. Single-well System
4.2. Double-well System
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yarita, I.; Furukawa, K.; Seino, Y.; Takimoto, T.; Nakazato, Y.; Nakagawa, K. Analysis of chattering in cold rolling for ultrathin gauge steel strip. Trans. Iron Steel Inst. Jpn. 1978, 18, 1–10. [Google Scholar] [CrossRef]
- Tamiya, T.; Furui, K.; Lida, H. Analysis of chattering Phenomenon in cold Rolling. In Proceedings of the International Conference on Steel Rolling, Tokyo, Japan, 29 September–4 October 1980; pp. 1192–1202. [Google Scholar]
- Hou, D.X.; Peng, R.R.; Liu, H.R. Vertical-Horizontal coupling vibration characteristics of strip mill rolls under the variable friction. J. Northeast. Univ. (Nat. Sci.) 2013, 34, 1615–1619. [Google Scholar]
- Hou, D.X.; Chen, H.; Liu, B. Analysis on parametrically excited nonlinear vertical vibration of roller system in rolling mills. J. Vib. Shock 2009, 28, 1–5. [Google Scholar]
- Hou, D.X.; Zhu, Y.; Liu, H.R.; Liu, F.; Peng, R. Research on nonlinear vibration characteristics of cold rolling mill based on dynamic rolling force. J. Mech. Eng. 2013, 49, 45–50. [Google Scholar] [CrossRef]
- Hou, D.X.; Wang, X.G.; Zhang, H.W.; Zhao, H.X. Parametrically excited vibration characteristics of cold rolling mill under nonlinear dynamic rolling process. J. Northeast. Univ. (Nat. Sci.) 2017, 38, 1754–1759. [Google Scholar]
- Huang, J.L.; Zhang, Y.; Gao, Z.Y.; Zeng, L. Influence of asymmetric structure parameters on rolling mill stability. J. Vibroeng. 2017, 19, 4840–4853. [Google Scholar] [CrossRef] [Green Version]
- Huang, J.L.; Zang, Y.; Gao, Z.Y. Influence of friction coefficient asymmetry on vibration and stability of rolling mills during hot rolling. Chin. J. Eng. 2019, 41, 1465–14722. [Google Scholar]
- Sun, Y.Y.; Xiao, H.F.; Xu, J.W. Nonlinear vibration characteristics of a rolling mill system considering the roughness of rolling interface. J. Vib. Shock 2017, 36, 113–120. [Google Scholar]
- He, D.P.; Wang, T.; Xie, J.Q.; Ren, Z.; Liu, Y. An analysis on parametrically excited nonlinear vertical vibration of a roller system in corrugated rolling mills. J. Vib. Shock 2019, 38, 164–171. [Google Scholar]
- He, D.P.; Wang, T.; Xie, J.Q.; Ren, Z.; Liu, Y.; Ma, X. Research on principal resonance bifurcation control of roller system in corrugated rolling mills. J. Mech. Eng. 2020, 56, 109–118. [Google Scholar]
- He, D.P.; Xu, H.D.; Wang, T. Nonlinear time-delay feedback controllability for vertical parametrically excited vibration of roll system in corrugated rolling mill. Metall. Res. Technol. 2020, 117, 3–12. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Jiang, J.H.; Liu, F.; Liu, H.; Li, P. Nonlinear vibration characteristic of strip mill under the coupling effect of roll-rolled piece. J. Vibroeng. 2016, 18, 5492–5505. [Google Scholar] [CrossRef] [Green Version]
- Liu, B.; Jiang, J.H.; Liu, F.; Liu, H.; Li, P. Nonlinear vibration characteristics of strip mill influenced by horizontal vibration of rolled piece. China Mech. Eng. 2016, 27, 2513–2520. [Google Scholar]
- Zhang, R.C.; Chen, Z.K.; Wang, F.B. Study on parametrically excited horizontal nonlinear vibration in single-roll driving mill system. J. Vib. Shock. 2010, 29, 105–108. [Google Scholar]
- Yang, X.; Li, J.Y.; Tong, C.N. Nonlinear vibration modeling and stability analysis of vertical roller system in cold rolling mill. J. Vib. Meas. Diagn. 2013, 33, 302–306. [Google Scholar]
- Seilsepour, H.; Zarastv, M.; Talebitooti, R. Acoustic insulation characteristics of sandwich composite shell systems with double curvature: The effect of nature of viscoelastic core. J. Vib. Control 2022, 29, 5–6. [Google Scholar] [CrossRef]
- Ghafouri, M.; Ghassabi, M.; Zarastvand, M.R. Sound Propagation of Three-Dimensional Sandwich Panels: Influence of Three-Dimensional Re-Entrant Auxetic Core. AIAA J. 2022, 60, 6374–6384. [Google Scholar] [CrossRef]
- Ghayesh, M.H. Nonlinear transversal vibration and stability of an axially moving viscoelastic string supported by a partial viscoelastic guide. J. Sound Vib. 2008, 314, 757–774. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Moradian, N. Nonlinear dynamic response of axially moving, stretched viscoelastic strings. Arch. Appl. Mech. 2011, 81, 781–799. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Alijani, F.; Darabi, M.A. An analytical solution for nonlinear dynamics of a viscoelastic beam-heavy mass system. J. Mech. Sci. Technol. 2011, 25, 1915–1923. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Amabili, M.; Farokhi, H. Coupled global dynamics of an axially moving viscoelastic beam. Int. J. Non-Linear Mech. 2013, 51, 54–74. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Amabili, M. Nonlinear dynamics of axially moving viscoelastic beams over the buckled state. Comput. Struct. 2012, 112–113, 406–421. [Google Scholar] [CrossRef]
- Ghayesh, M.H.; Amabili, M.; Farokhi, H. Two-dimensional nonlinear dynamics of an axially moving viscoelastic beam with time-dependent axial speed. Chaos Solitons Fractals 2013, 52, 8–29. [Google Scholar] [CrossRef]
- Ghayesh, M.H. Parametrically excited viscoelastic beam-spring systems: Nonlinear dynamics and stability. Struct. Eng. Mech. 2011, 40, 705–718. [Google Scholar] [CrossRef]
- Farokhi, H.; Ghayesh, M.H.; Hussain, S. Three-dimensional nonlinear global dynamics of axially moving viscoelastic beams. J. Vib. Acoust. 2016, 138, 011007. [Google Scholar] [CrossRef] [Green Version]
- Ghayesh, M.H.; Farokhi, H.; Hussain, S. Viscoelastically coupled size-dependent dynamics of microbeams. Int. J. Eng. Sci. 2016, 109, 243–255. [Google Scholar] [CrossRef]
- Liu, L.; Wang, J.; Zhang, L.C.; Zhang, S. Multi-AUV Dynamic Maneuver Countermeasure Algorithm Based on Interval Information Game and Fractional-Order DE. Fractal Fract. 2022, 6, 235. [Google Scholar] [CrossRef]
- Lu, Z.Q.; Gu, D.H.; Ding, H.; Lacarbonara, W.; Chen, L.Q. Nonlinear vibration isolation via a circular ring. Mech. Syst. Signal Process. 2020, 136, 106490. [Google Scholar] [CrossRef]
- Li, X.; Dong, Z.Q.; Wang, L.P.; Niu, X.D.; Yamaguchi, H.; Li, D.C.; Yu, P. A magnetic field coupling fractional step lattice Boltzmann model for the complex interfacial behavior in magnetic multiphase flows. Appl. Math. Model. 2023, 117, 219–250. [Google Scholar] [CrossRef]
- Mainardi, F. Fractional Calculus and Waves in Linear Viscoelasticity; Imperial College Press: London, UK, 2010. [Google Scholar]
- Meral, F.C.; Royston, T.J.; Magin, R. Fractional calculus in viscoelasticity: An experimental study. Commun. Nonlinear Sci. Numer. Simul 2010, 15, 939–945. [Google Scholar] [CrossRef]
- Xu, H.Y.; Yang, X.Y. Creep constitutive models for viscoelastic materials based on fractional derivatives. Comput. Math. Appl. 2017, 73, 1377–1387. [Google Scholar] [CrossRef]
- Shen, L.J. Fractional derivative models for viscoelastic materials at finite deformations. Int. J. Solids Struct. 2020, 190, 226–237. [Google Scholar] [CrossRef]
- Dang, R.Q.; Chen, Y.M. Fractional modelling and numerical simulations of variable-section viscoelastic arches. Appl. Math. Comput. 2021, 409, 126376. [Google Scholar] [CrossRef]
- Hashemizadeh, E.; Ebrahimzadeh, A. An efficient numerical scheme to solve fractional diffusion-wave and fractional Klein–Gordon equations in fluid mechanics. Physica A 2018, 503, 1189–1208. [Google Scholar] [CrossRef]
- Odibat, Z.; Momani, S. The variational iteration method: An efficient scheme for handling fractional partial differential equations in fluid mechanics. Comput. Math. Appl. 2009, 58, 2199–2208. [Google Scholar] [CrossRef] [Green Version]
- Magin, R.L.; Ovadia, M. Modeling the cardiac tissue electrode interface using fractional calculus. IFAC Proc. 2008, 39, 1431–1442. [Google Scholar] [CrossRef]
- Mainardi, F. Fractional Calculus. In Fractals and Fractional Calculus in Continuum Mechanics; Springer: Berlin, Germany, 1997; pp. 291–348. [Google Scholar]
- Rossikhin, Y.A.; Shitikova, M.V. Application of fractional calculus for dynamic problems of solid mechanics: Novel trends and recent results. Appl. Mech. Rev. 2010, 63, 10801. [Google Scholar] [CrossRef]
- Yan, Z.; Wang, W.; Liu, X.B. Analysis of a quintic system with fractional damping in the presence of vibrational resonance. Appl. Math. Comput. 2018, 321, 780–793. [Google Scholar] [CrossRef]
- Xie, J.Q.; Wang, H.J.; Chen, L. Dynamical analysis of fractional oscillator system with cosine excitation utilizing the average method. Math. Methods Appl. Sci. 2022, 45, 10099–10115. [Google Scholar] [CrossRef]
- Wen, B.C.; Li, Y.N.; Han, Q.K. Analytical Methods in Nonlinear Vibration Theory and Engineering Applications; Northeastern University Press: Shijiazhuang, China, 2000. [Google Scholar]
- Podlubny, I. Fractional Differential Equations; IBT-M in S and E; Academic Press: New York, NY, USA, 1999. [Google Scholar]
- Li, C. Numerical Methods for Fractional Calculus; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Xu, M.; Tan, W. Intermediate processes and critical phenomena: Theory, method and progress of fractional operators and their applications to modern mechanics. Sci. Chin. 2006, 49, 257–272. [Google Scholar] [CrossRef]
- Li, C.; Peng, G. Chaos in Chen’s system with a fractional order. Chaos Solitons Fract. 2004, 22, 443–450. [Google Scholar] [CrossRef]
- French, M.; Rogers, J. A survey of fractional calculus for structural dynamics applications. IMAC 2001, 1, 305–309. [Google Scholar]
- Yang, Y.; Xu, W.; Gu, X.; Sun, Y. Stochastic response of a class of self-excited systems with Caputo-type fractional derivative driven by Gaussian white noise. Chaos Solitons Fractals 2015, 77, 190–204. [Google Scholar] [CrossRef]
- Yang, J.H. Vibrational resonance in fractional-order anharmonic oscillators. Chin. Phys. Lett. 2012, 29, 104501–104504. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Hänggi, P.; Jung, P. Stochastic resonance. Rev. Mod. Phys. 1998, 70, 223. [Google Scholar] [CrossRef]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, L.; Wang, T.; Huang, Q.-X. Resonance Analysis of Horizontal Nonlinear Vibrations of Roll Systems for Cold Rolling Mills under Double-Frequency Excitations. Mathematics 2023, 11, 1626. https://doi.org/10.3390/math11071626
Jiang L, Wang T, Huang Q-X. Resonance Analysis of Horizontal Nonlinear Vibrations of Roll Systems for Cold Rolling Mills under Double-Frequency Excitations. Mathematics. 2023; 11(7):1626. https://doi.org/10.3390/math11071626
Chicago/Turabian StyleJiang, Li, Tao Wang, and Qing-Xue Huang. 2023. "Resonance Analysis of Horizontal Nonlinear Vibrations of Roll Systems for Cold Rolling Mills under Double-Frequency Excitations" Mathematics 11, no. 7: 1626. https://doi.org/10.3390/math11071626