1. Introduction
As promising platforms for quantum information processing, quantum networks (QNs) [
1] have recently attracted much interest [
2,
3,
4,
5,
6,
7]. It is important to understand the quantum correlations that arise in a QN. Recent developments have shown that the topological structure of a QN leads to novel notions of nonlocality [
8,
9] and new concepts of entanglement and separability [
10,
11,
12]. These new concepts and definitions are different from the traditional ones [
13,
14] and thus need to be analysed using new theoretical tools, such as mutual information [
10,
11], fidelity with pure states [
11,
12], and covariance matrices built from measurement probabilities [
15,
16].
According to Bell’s local causality assumption [
17,
18], the joint probability
of obtaining measurement outcomes
of systems
can be obtained in terms of a local hidden variable model (LHVM) with just one “hidden variable”, or “hidden state”,
. Such a probability distribution is said to be Bell local. Focusing on QNs, completely different approaches to multipartite nonlocality were proposed [
19,
20,
21,
22,
23]. That means that network nonlocalities are fundamentally different from standard multipartite nonlocalities. Carvacho et al. [
24] investigated a quantum network consisting of three spatially separated nodes and experimentally witnessed quantum correlations in the network. Due to the complex topological structure of a network, it is possible to detect the quantum nonlocality in experiments by performing just one fixed measurement [
8,
25,
26,
27,
28].
Quantum coherence originated from the superposition principle originally pointed out by Schrödinger [
29] and is a fundamentally quantum property [
30,
31]. Quantum nonlocality is a correlation property of subsystems of a multipartite system, exhibited by a set of local measurements. It is also a powerful tool for analyzing correlations in a quantum network [
32] and a direct link between the theory of multisubspace coherence [
33] and the approach to quantum networks with covariance matrices [
15,
16].
Patricia et al. [
34] found some sufficient conditions for nonlocality in QNs and showed that any network with shared pure entangled states is genuinelu multipartite nonlocal. Šupić et al. [
35] proposed a concept of genuine network quantum nonlocality and proved several examples of genuine network nonlocal correlations.
Recently, Tavakoli et al. [
36] discussed the main concepts, methods, results, and future challenges of network nonlocality with a list of open problems. More recently, Xiao et al. [
37] discussed two types of trilocality in probability tensors (PTs),
and that of correlation tensors (CTs)
, based on the triangle network [
8] and described by continuous (integral) and discrete (sum) trilocal hidden variable models (C-triLHVMs and D-triLHVMs).
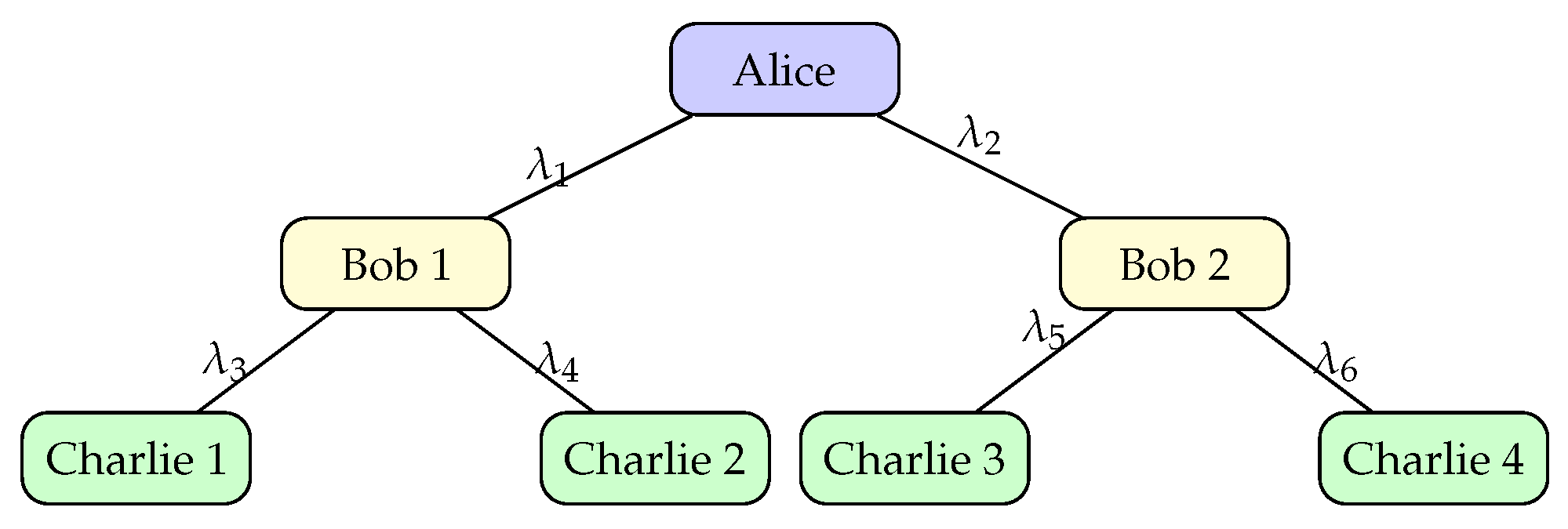
Haddadi et al. [
38] studied the thermal evolution of the entropic uncertainty bound in the presence of quantum memory for an inhomogeneous, four-qubit, spin-star system and proved that the entropic uncertainty bound can be controlled and suppressed by adjusting the inhomogeneity parameter of the system. Related research on spin-star systems can be found in [
39,
40] and the references therein. As a generalization of star-networks [
22,
23], Yang et al. [
41] considered the nonlocality of
-partite tree-tensor networks (referring to
Figure 1 for the case where
) and derived the Bell-type inequalities.
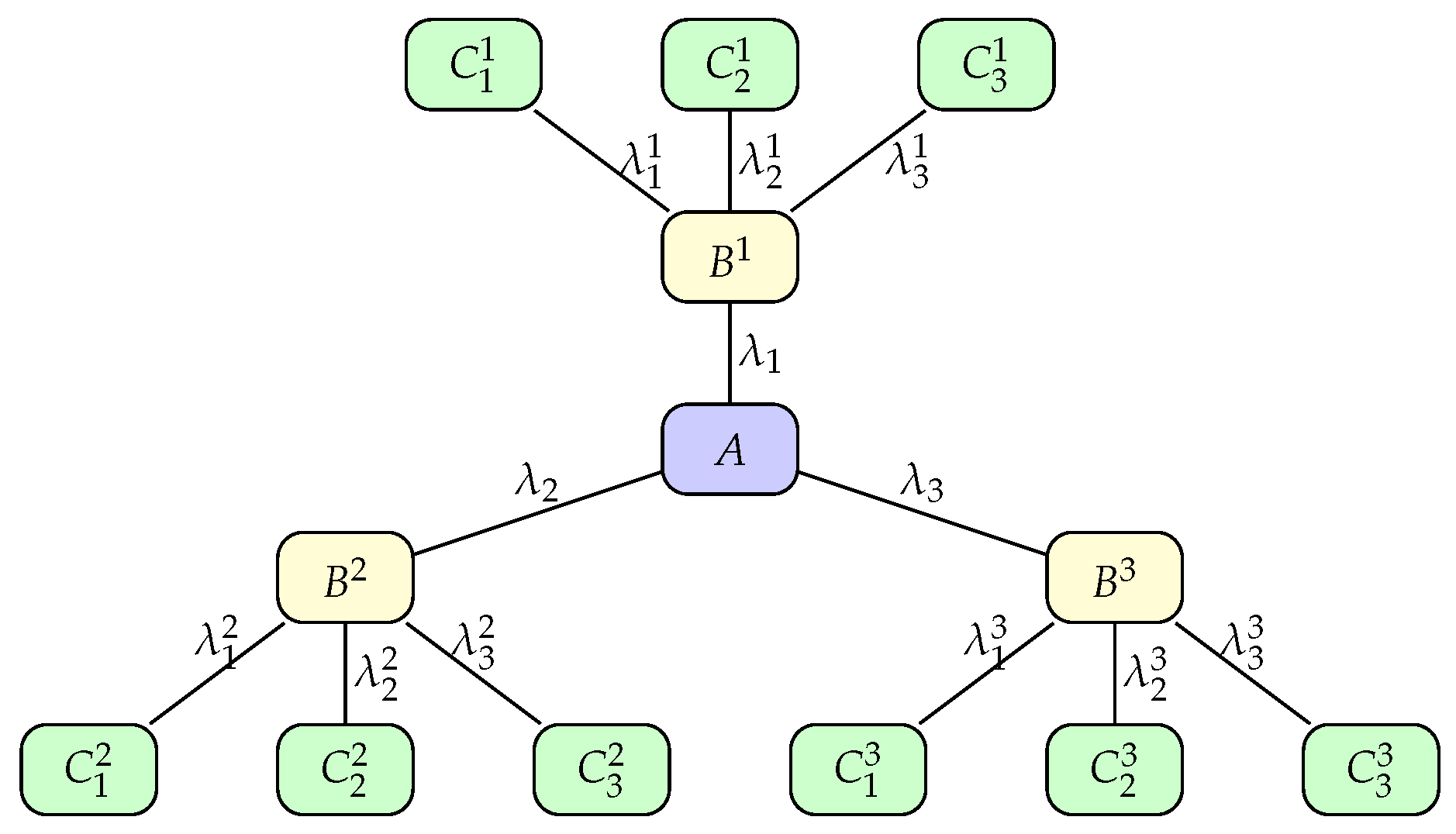
Extending the scenario in [
41], Yang et al. [
42] discussed the nonlocality of a type of multi-star-shaped QNs (
Figure 2), called 3-layer
m-star QNs (3-
m-SQNWs), and established related Bell-type inequalities.
In this work, we study the nonlocality of star-shaped CTs and star-shaped PTs based on a more general multi-star network
depicted in
Figure 3.
Such a network consists of nodes and one center-node A that connects to m star-nodes while each star-node has star-nodes .
In
Section 2, we will introduce the star-locality and star-nonlocality of the multi-star-network
and give some related properties. In
Section 3, we will first introduce star-shaped CTs (SSCTs), including star-shaped PTs (SSPTs), and discuss two types of localities of SSCTs and SSPTs, called D-star-locality and C-star-locality. Then, we establish a series of characterizations of D-star-localities and C-star-localities, show the equivalence of these two types of localities, and give some necessary conditions for star-shaped CT to be D-star-local. At the end of this section, we will show that the set
of all star-local SSCTs over the index set
is a compact and path-connected subset in the Hilbert space
of all tensors over
and contains at least two types of subsets that are star-convex. In
Section 4, we shall establish an inequality that holds for all star-local SSCTs, called a star-Bell inequality. Based on our inequality, two examples are given. The first example is a star-nonlocal
, in which the shared states are all entangled pure states, and the second one gives a star-nonlocal
in which the shared states are all entangled mixed states. In
Section 5, we will give a summary and conclusions.
3. Star-Locality of Star-Shaped Cts
When a multi-star network given by
Figure 3 for the case that
is measured by parties
the conditional probabilities
of obtaining result
conditioned on the measurement choice
form a correlation tensor (CT) [
44]
over the index set
which is a non-negative function defined on
satisfying the following completeness condition:
We call such a a star-shaped CT over . Let be the set of all star-shaped CTs over .
To discuss the algebraic and topological properties of the
, we have to make it live in a Hilbert space. To accomplish this, we let
be the set of all real tensors
over
. That is,
if and only if it is a real-valued function defined on
with the value
and a point
in
. Clearly,
becomes a finite-dimensional Hilbert space over
with respect to the following operation and inner product:
The norm induced by the inner product reads
Especially, when
for all
, we denote
by
and call it a
star-shaped probability tensor (PT) over
Let
be the set of all star-shaped PTs over
and let
be the set of all real tensors
over
, which is a finite-dimensional Hilbert space over
with respect to the following operation and inner product:
The norm induced by the inner product reads
3.1. Concepts
Definition 2. A star-shaped CT over is said to be C-star-local if it admits a “C-star-shaped LHVM":for all , where (i) is a product measure space with (ii) All of the local hidden variables (LHVs) are independent, i.e.,where and are density functions (DFs) of and , respectively, i.e., they are non-negative and satisfy (iii) and are PDs of and , respectively, and are measurable with respect to and , respectively.
A star-shaped CT over is said to be C-star-nonlocal if it is not C-star-local.
We use and to denote the sets of all C-star-local CTs and all C-star-nonlocal CTs over , respectively.
Specifically, when
are finite sets with the counting measures, a C-star-shaped-LHVM (
12) becomes a “D-star-shaped-LHVM”:
where
, and
are PDs of
and
, respectively, and the joint PD
is given by (
13). In this case, we say that
is
D-star-local. If
has no D-star-shaped LHVMs of the form (
14), then we say that it is
D-star-nonlocal.We use
and
to denote the sets of all D-star-local CTs and all D-star-nonlocal CTs over
, respectively. Clearly,
Definition 3. A star-shaped PT over is said to be C-star-local if it admits a ”C-star-shaped LHVM”:for all , where is a DF of the form (13). It is said to be C-star-nonlocal if it is not C-star-local. Definition 4. A star-shaped PT over is said to be D-star-local if it admits a ”D-star-shaped LHVM":for all , where is a PD of the form (13). It is said to be D-star-nonlocal if it is not D-star-local. Definition 5. A star-shaped PT over is said to be star-local if it is either C-star-local or D-star-local. It is said to be star-nonlocal if is neither C-star-local nor D-star-local.
We use (resp., ) to denote the set of all C-star-local (resp., D-star-local) star-shaped PTs over .
3.2. Characterizations
To show every C-star-local CT (especially every PT) is D-star-local, we need the following lemma [
37,
43]. Recall that an
function matrix
on
is said to be
row-statistic (RS) if, for each
,
for all
and
Lemma 1. Let be a measurable space and let be an RS function matrix whose entries are Ω
-measurable on Λ.
Then, can be written as:where are all non-negative and Ω
-measurable functions on Λ
with for all , and denotes the set of all maps from into . Put
and let
be the set of all maps from
into
,
the set of all maps from
into
, and let
be the set of all maps from
into
.
Let
be a C-star-local CT over
. Then, it has a C-star-shaped LHVM (
12). Since function matrices
are RS for each parameters
and their entries are measurable with respect to the related parameters, respectively, it follows from Lemma 1 that they have the following decompositions:
equivalently,
where
,
and
are PDs of
and
, respectively, and are measurable with respect to
and
, respectively. It follows from Equations (
12) and (
18)–(
20) that
for all
, where
and
with
given by (
13). Clearly,
is a C-star-local PT over
which generates
in terms of Equation (
21).
Conversely, if (
21) holds for some completely independent PD (
13) and a C-star-local PT
with a C-star-shaped LHVM (
22), then (
12) holds for
and
given by Equations (
18)–(
20). Thus,
is C-star-local.
This shows that (
12) ⇔ (
21) and leads to the following.
Theorem 1. A star-shaped CT over is C-star-local if and only if it has the following decomposition:where is a C-star-local PT over given by (22) and is given by As an application of Theorem 1, we obtain the following relationship between C-star-local CTs and C-star-local PTs:
Again, we let
be a C-star-local CT over
. We aim to prove that
is D-star-local. First, it has a C-star-shaped LHVM (
12). Since
we obtain from (
12) and (
20) that
Put
which are PDs of
and satisfy
and define
if
; and
otherwise. Clearly,
is a PD of
for each
, and when
, we have
Note that the right-hand side of above equation is less than equal to
and is equal to zero when
. Thus, Equation (
26) is valid in any case. Using Equation (
26) yields that
Combining Equation (
25) yields that
Using Lemma 1 for the RS function matrix
with
-entry
, we get that
where
is a PD of
and is measurable with respect to
, and
denotes the set of all maps from
into
. Thus, we see from Equation (
28) that
It follows from Equations (
27) and (
29) that
Put
then we obtain a PD
of
for every
j. Define
and put
if
; otherwise, define
for all
, then
is a PD of
a and
Thus, from Equations (
30) and (
32), we get that
where
, and
Put
which are of PDs of
and
, respectively. Then Equation (
33) becomes
This shows that is D-star-local.
From this discussion, we have the following conclusion.
Theorem 2. A star-shaped CT over is C-star-local if and only if it is D-star-local, that is, Due to this conclusion, we say that a star-shaped CT P over is star-local if it is C-star-local, equivalently, if it is D-star-local.
As a special case of
, Theorem 2 implies the following result, which is an equivalent characterization of the six-locality discussed in [
41].
Corollary 1. The correlations discussed in [41] are six-local if and only if the following decomposition is valid:for all possible , where ’s are PDs of , and are PDs of , respectively. Theorem 3. A star-shaped CT over is star-local if and only if it is “separable star-quantum", i.e., it can be generated by an MA (3) together with some separable states and , in such a way thatwhere the network state Γ is given by Equation (1). Proof. To show the necessity, we let
be star-local. Then, it can be written as (
14), that is,
where
and
are PDs of
and
, respectively, and
in which
and
are PDs of
and
, respectively. Choose Hilbert spaces
where
denotes the cardinality of a finite set
S; take their orthonormal bases
and
, respectively; and put
Then, we can obtain a network state
which induces the measurement state
where
To define an MA (
3), we put
It can be checked that
for all possible variables
, and
This proves that
is separable star-quantum.
Conversely, we suppose that
can be written as the form of (
36). Then, from the proof of Proposition 4, we see that
has a D-star-shaped LHVM (
9) and then is star-local. The proof is completed. □
Theorem 4. Let a star-shaped CT over be star-local. Then, for each and , the following conclusions are valid.
(a) The marginal of on subsystem is bilocal.
(b) The marginal of on subsystem is product: , i.e., (c) The -partite CTis -local. Proof. Since
is star-local, it has a D-star-shaped LHVM (
14):
where
in which
and
are PDs of
and
, respectively.
(a) Using (
40) implies that
where
This shows that
is bilocal [
43]
(b) Using Equation (42) implies that
implying Equation (
39).
(c) Using the definition of
and (
14), we have
for all possible
This shows that the
-partite CP
is
-local [
43]. The proof is completed. □
For a star-shaped CT
over
, the conclusion (a) of Theorem 4 ensures that if there exists an index
such that the marginal
is not bilocal, and conclusion (b) implies that if some of the marginal
is not a product, then
must be star-nonlocal. Using conclusion (c) shows that when some marginal
is not
-local [
43],
must be star-nonlocal.
3.3. Global Properties
As the end of this section, let us give some properties of the set
. First, since all elements of
admit their D-star-shaped LHVMs (
34) with the
unified form of summation, in which the index sets
are independent of
, the following conclusion can be checked easily.
Theorem 5. is a compact subset of the Hilbert space .
This conclusion ensures that the set forms a relative open set in the Hilbert space That means that any star-shaped CTs near a star-nonlocal CT are all star-nonlocal.
Theorem 6. is a path-connected set in the Hilbert space .
Proof. Put
then
is an element of
. Let
and
be any two elements of
. Then,
and
admit D-star-shaped-LHVMs:
where
in which
and
are PDs of
and
, respectively, and
where
,
, and
in which
and
are PDs of
and
, respectively.
For every
, set
which are clearly PDs of
a,
, and
, respectively. Put
then
is a star-local CT over
for all
with
and
. Obviously, the map
from
into
is continuous. Similarly, for every
, set
which are clearly PDs of
a,
, and
, respectively. Put
then
is a star-local CT over
for all
with
and
. Obviously, the map
from
into
is continuous. Thus, the function
defined by
is continuous everywhere and then induces a path
p in
with
and
. This shows that
is path-connected. The proof is completed. □
Next, we discuss the “quasi-convexity” of the set by finding two classes of subsets of that are star-convex.
For any fixed
and
, by taking a star-shaped CT
such that the marginal
is completely product:
where
we define a star-shaped CT
by
Put
which is just the set of all star-local CTs over
with a fixed marginal distribution
on the subsystem
. Clearly,
and
Using these notations, we obtain the following.
Theorem 7. The set is star-convex with a sun , i.e., for all , it holds that Proof. Let
and
. Then,
and
Since
has a D-star-shaped-LHVM:
we get that
For every
, put
and define
which are PDs of
and
, respectively. Put
then
.
On the other hand, for all
, we compute that
Using Equations (
47)–(
49), we obtain that
Since , we have This shows that The proof is completed. □
Next, let us find another star-convex subset of
Fixed
and taken a star-shaped CT
such that
where
we define a star-shaped CT
by
Put
which is just the set of all star-local CTs over
with fixed marginal distribution
on the subsystem
. Clearly,
and then
.
With these notations, we have the following.
Theorem 8. The set is star-convex with a sun , i.e., for all , it holds that Proof. Let
Then,
and
. Since
has a D-star-shaped LHVM
we get that
For every
, put
and define
Clearly, .
On the other hand, for all
, we compute that
Clearly, . Hence, The proof is completed. □
4. A Star-Bell Inequality
In this section, we derive an inequality (
56) that holds for all star-local star-shaped CTs, called a star-Bell inequality. Consider a star-shaped CT
with inputs
and outcomes
, where
Put
. For all
, we define the following two quantities
Theorem 9. If a star-shaped CT
Pgiven by Equation (53) is star-local, then Proof. Since
is star-local, it has a D-star-shaped LHVM (
14). Thus,
where
Note that
, we have
where
Analogously, we can get
where
Since
where
and
are probability distributions, we have from Equation (
57) that
Note that
for all
, we obtain that
Similarly, using inequality (
59) implies that
Using the following inequality [
22] Lemma 1:
we have
This shows that inequality (
56) is valid and completes the proof. □
The validity of the inequality (
56) is a necessary condition for a star-shaped CT
to be star-local. So, we call it a star-Bell inequality (SBI). Thus, a violation of SBI for some parameters
and
shows that
is star-nonlocal.
Let us return to the network situation. Let
,
and
be
-valued observables of
,
, and
. Then, we have the following spectrum decompositions:
Put
which are clearly POVMs of
,
, and
, respectively. Then, we can get a measurement assemblage
of the quantum network with measurement operators
where
For all
, it is computed that
Similarly, for all
, we have
This shows that the SBI (
56) becomes
It is valid whenever the network with state
is star-local for the given MA
. Hence, to explore the star-nonlocality of the
, it suffices to choose some specific states distributed in the network and to choose specific measurements for each party such that the corresponding SBI (
56) is violated for some
and
.
Example 1. Let us consider the situation that the states distributed in the network are pure entangled states. Denotethe normalized pure states shared by A and and by and , respectively, with real and positive coefficients and with and . Thus,Then, we can get Consider the -valued observables of , , and :where , is the vector composed of Pauli operators and . The spectral projections form an MA given by (62) for the network. Using Equations (67), (68) and (63) and taking , we can get Analogously, taking , we have Taking , i.e., for all yields that By taking such thatfor each , we get thatsince This shows that SBI (65) is violated for and then the network with the shared states given by (66) is star-nonlocal. The following example is about a situation in which the states distributed in the network are Werner states with noise parameters and .
Example 2. Let us consider the Werner states distributed in the network:where and . Consider the -valued observables of , and :where and are Pauli operators. The spectral projections form an MA given by (62) for the network. Using Equation (70), Equation (71), and Equation (63) and taking , we compute thatwhere . Analogously, taking , we have Hence, Thus, if and only if . Therefore, when the coefficients of the shared state (70) satisfy the condition , Equation (65) is violated, and then the network is star-nonlocal. 5. Summary and Conclusions
In this work, a more general multi-star-network
was introduced. Such a network consists of
nodes and one center-node
A that connects to
m star-nodes
while each star-node
has
star-nodes
. When
, it reduces to
, which is just an
n-local scenario [
22,
43], and when
, it becomes
, reducing to the bi-local scenario [
20,
43].
First, we have introduced the nonlocality of the star-locality and star-nonlocality of such a network and deduced some related properties. Based on the architecture of such a network, we have proposed the concepts of star-shaped correlation tensors (SSCTs) and star-shaped probability tensors (SSPTs) and mathematically formulated two types of localities of SSCTs and SSPTs, named “D-star-locality” and “C-star-locality”. By definition, an SSCT/SSPT is said to be C-star-local (resp., D-star-local) if it admits an integral star-shaped LHVM (resp., a finite-sum star-shaped LHVM). By establishing a series of characterizations, we have proven the equivalence of these localities is verified and then called them “star-locality". We have also found some necessary conditions for a star-shaped CT to be star-local. For the global properties of star-local SSCTs, we have proved that the set of all star-local SSCTs forms a path-connected compact set in the Hilbert space of tensors over the index set and has least two types of star-convex subsets. Lastly, we have established a star-Bell inequality, which is proven to be valid for all star-local SSCTs. Based on this inequality, we have given two examples of star-nonlocal multi-star-network with the shared pure and mixed entangled states, respectively.





{kind=link}
{kind=link}
{kind=link}