
New Results on Finite-Time Synchronization Control of Chaotic Memristor-Based Inertial Neural Networks with Time-Varying Delays
 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- A novel finite-time stability criterion is derived (see Lemma 2), which is different from the existing finite-time stability criteria and extends the previous results.
- By combining finite-time control theory with a new NROD, which can study MINNs themselves directly instead of using the variable substitution method, some new theoretical criteria to ensure the FTS for the studied MINNs are developed.
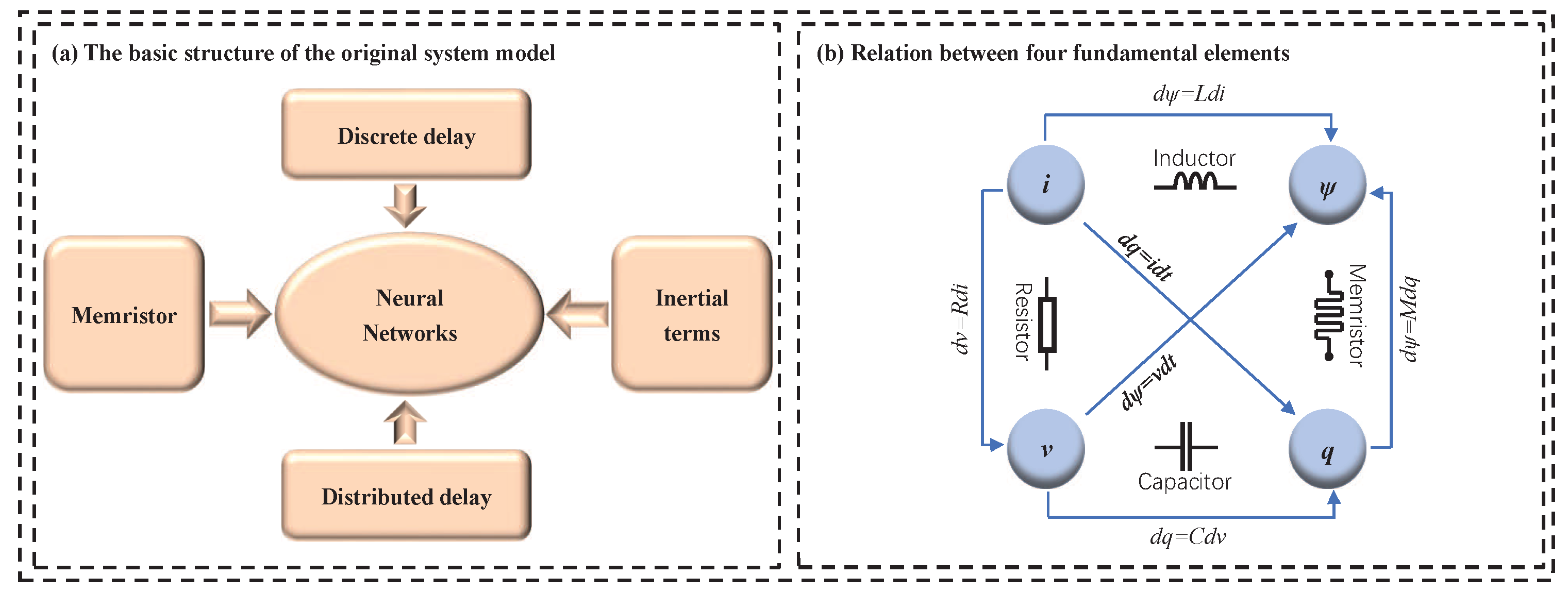
- Taking the memristors, inertial items, and MTVDs into account, the acquired theoretical results are established in a more general framework than the previous results and widens the application scope.
2. Preliminaries
3. Main Results
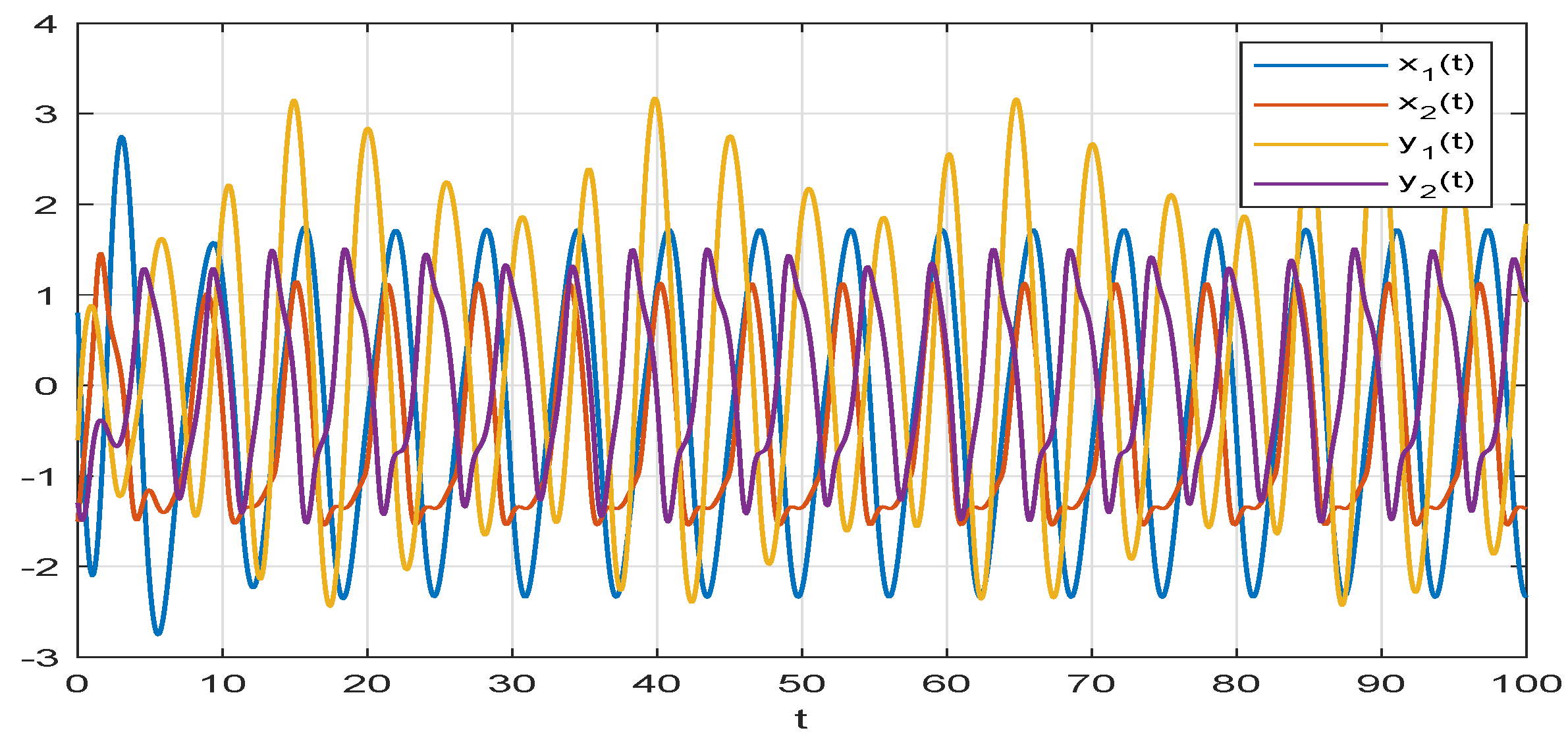
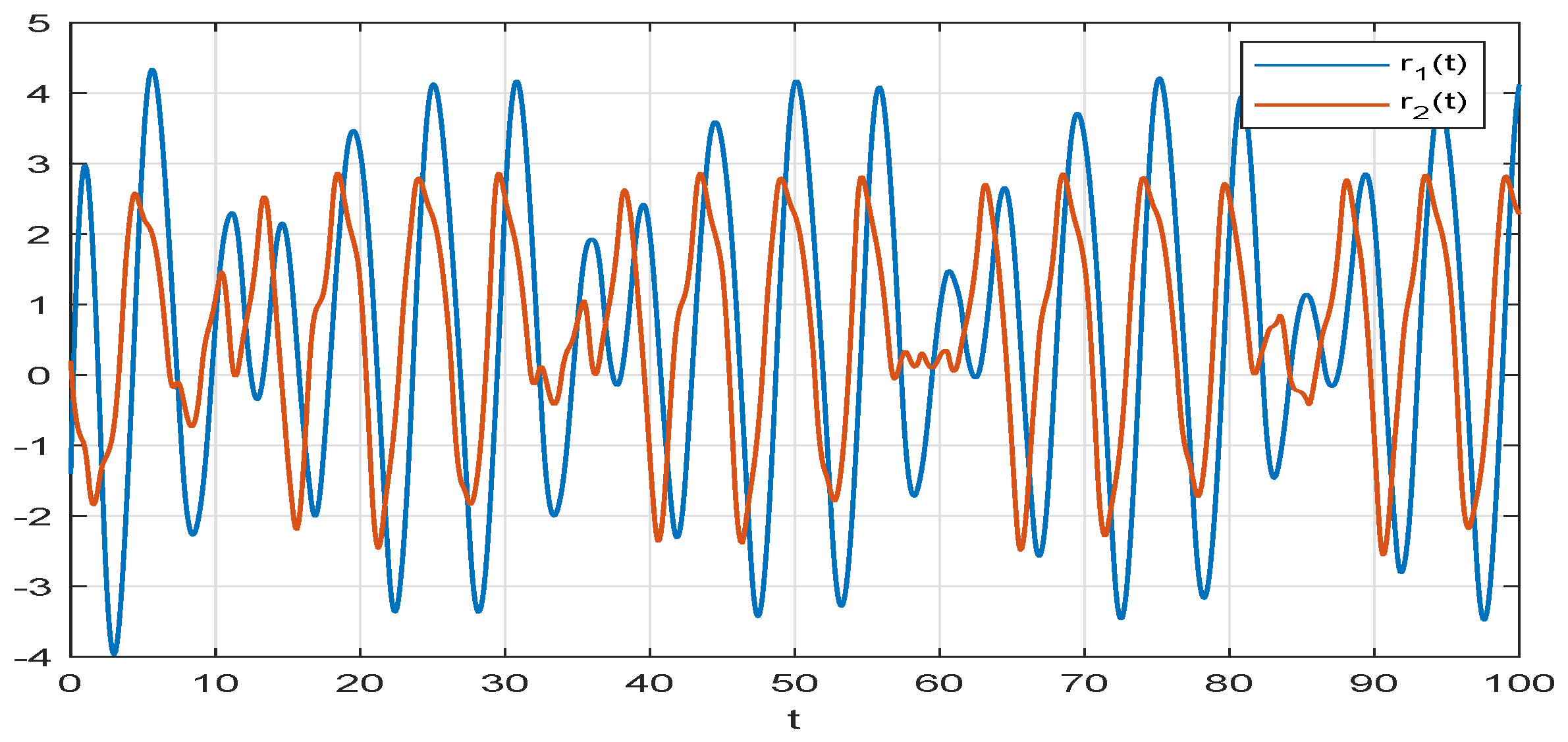
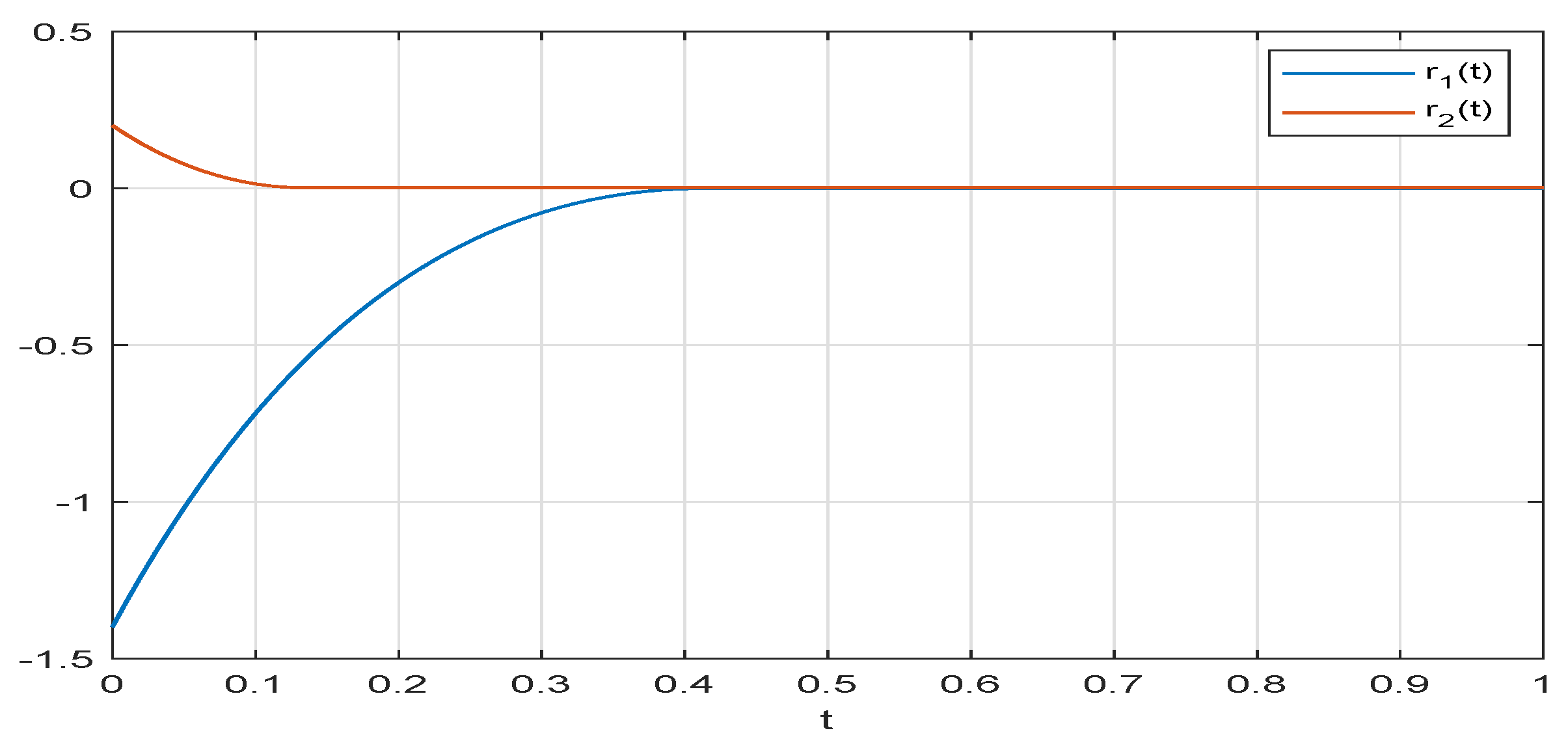
4. Illustrative Example
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
Appendix C
Appendix D
Appendix E
References
- Chong, E.K.P.; Hui, S.; Zak, S.H. An analysis of a class of neural networks for solving linear programming problems. IEEE Trans. Autom. Control 1999, 44, 1995–2006. [Google Scholar] [CrossRef]
- Lee, T.H.; Trinh, H.M.; Park, J.H. Stability Analysis of Neural Networks with Time-Varying Delay by Constructing Novel Lyapunov Functionals. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 4238–4247. [Google Scholar] [CrossRef]
- Chen, J.; Park, J.H.; Xu, S. Stability Analysis for Neural Networks with Time-Varying Delay via Improved Techniques. IEEE Trans. Cybern. 2019, 49, 4495–4500. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; He, Y.; Jiang, L.; Wu, M. Stability Analysis for Delayed Neural Networks Considering Both Conservativeness and Complexity. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1486–1501. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dong, S.; Zhong, S.; Shi, K.; Kang, W.; Cheng, J. Further improved results on non-fragile H∞ performance state estimation for delayed static neural networks. Neurocomputing 2019, 356, 9–20. [Google Scholar] [CrossRef]
- Kiannejad, M.; Salehizadeh, M.R.; Oloomi-Buygi, M.; Baringo, L. A stochastic offering approach for photovoltaic power plants in day-ahead and balancing markets. Int. J. Electr. Power Energy Syst. 2023, 147, 108841. [Google Scholar] [CrossRef]
- Kiannejad, M.; Salehizadeh, M.R.; Oloomi-Buygi, M. Two-stage ANN-based bidding strategy for a load aggregator using decentralized equivalent rival concept. IET Gener. Transm. Distrib. 2021, 15, 56–70. [Google Scholar] [CrossRef]
- Chen, J.; Zeng, Z.; Jiang, P. Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw. 2014, 51, 1–8. [Google Scholar] [CrossRef]
- Hua, L.; Zhong, S.; Shi, K.; Zhang, X. Further results on finite-time synchronization of delayed inertial memristive neural networks via a novel analysis method. Neural Netw. 2020, 127, 47–57. [Google Scholar] [CrossRef]
- Bao, H.; Park, J.H.; Cao, J. Adaptive synchronization of fractional-order memristor-based neural networks with time delay. Nonlinear Dyn. 2015, 82, 1343–1354. [Google Scholar] [CrossRef]
- Liu, Y.; Tong, L.; Lou, J.; Lu, J.; Cao, J. Sampled-Data Control for the Synchronization of Boolean Control Networks. IEEE Trans. Cybern. 2019, 49, 726–732. [Google Scholar] [CrossRef] [PubMed]
- Hua, L.; Zhu, H.; Shi, K.; Zhong, S.; Tang, Y.; Liu, Y. Novel Finite-Time Reliable Control Design for Memristor-Based Inertial Neural Networks with Mixed Time-Varying Delays. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 1599–1609. [Google Scholar] [CrossRef]
- Zhang, R.; Park, J.H.; Zeng, D.; Liu, Y.; Zhong, S. A new method for exponential synchronization of memristive recurrent neural networks. Inf. Sci. 2018, 466, 152–169. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, Z.; Ning, D. Novel results on synchronization for a class of switched inertial neural networks with distributed delays. Inf. Sci. 2020, 511, 114–126. [Google Scholar] [CrossRef]
- Zhang, R.; Zeng, D.; Park, J.H.; Liu, Y.; Zhong, S. Quantized Sampled-Data Control for Synchronization of Inertial Neural Networks with Heterogeneous Time-Varying Delays. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 6385–6395. [Google Scholar] [CrossRef] [PubMed]
- Guan, C.; Fei, Z.; Karimi, H.R.; Shi, P. Finite-Time Synchronization for Switched Neural Networks via Quantized Feedback Control. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 2873–2884. [Google Scholar] [CrossRef]
- Zhang, Z.; Cao, J. Novel Finite-Time Synchronization Criteria for Inertial Neural Networks with Time Delays via Integral Inequality Method. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1476–1485. [Google Scholar] [CrossRef]
- Alimi, A.M.; Aouiti, C.; Assali, E.A. Finite-time and fixed-time synchronization of a class of inertial neural networks with multi-proportional delays and its application to secure communication. Neurocomputing 2019, 332, 29–43. [Google Scholar] [CrossRef]
- Hua, L.; Zhu, H.; Zhong, S.; Zhang, Y.; Shi, K.; Kwon, O.M. Fixed-Time Stability of Nonlinear Impulsive Systems and Its Application to Inertial Neural Networks. IEEE Trans. Neural Netw. Learn. Syst. 2022, 1–12. [Google Scholar] [CrossRef]
- Babcock, K.; Westervelt, R. Stability and dynamics of simple electronic neural networks with added inertia. Phys. D Nonlinear Phenom. 1986, 23, 464–469. [Google Scholar] [CrossRef]
- Babcock, K.; Westervelt, R. Dynamics of simple electronic neural networks. Phys. D Nonlinear Phenom. 1987, 28, 305–316. [Google Scholar] [CrossRef]
- Wheeler, D.W.; Schieve, W. Stability and chaos in an inertial two-neuron system. Phys. D Nonlinear Phenom. 1997, 105, 267–284. [Google Scholar] [CrossRef]
- Angelaki, D.E.; Correia, M.J. Models of membrane resonance in pigeon semicircular canal type II hair cells. Biol. Cybern. 1991, 65, 1–10. [Google Scholar] [CrossRef]
- Tani, J. Model-based learning for mobile robot navigation from the dynamical systems perspective. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1996, 26, 421–436. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yunquan, K.; Chunfang, M. Stability and existence of periodic solutions in inertial BAM neural networks with time delay. Neural Comput. Appl. 2013, 23, 1089–1099. [Google Scholar] [CrossRef]
- Xiao, Q.; Huang, T.; Zeng, Z. Global Exponential Stability and Synchronization for Discrete-Time Inertial Neural Networks with Time Delays: A Timescale Approach. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 1854–1866. [Google Scholar] [CrossRef] [PubMed]
- Li, N.; Zheng, W.X. Synchronization criteria for inertial memristor-based neural networks with linear coupling. Neural Netw. 2018, 106, 260–270. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, Z. Stabilization of Second-Order Memristive Neural Networks with Mixed Time Delays via Nonreduced Order. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 700–706. [Google Scholar] [CrossRef]
- Zhang, G.; Zeng, Z.; Hu, J. New results on global exponential dissipativity analysis of memristive inertial neural networks with distributed time-varying delays. Neural Netw. 2018, 97, 183–191. [Google Scholar] [CrossRef]
- Lakshmanan, S.; Prakash, M.; Lim, C.P.; Rakkiyappan, R.; Balasubramaniam, P.; Nahavandi, S. Synchronization of an Inertial Neural Network with Time-Varying Delays and Its Application to Secure Communication. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 195–207. [Google Scholar] [CrossRef]
- Xu, C.; Zhang, Q. Existence and global exponential stability of anti-periodic solutions for BAM neural networks with inertial term and delay. Neurocomputing 2015, 153, 108–116. [Google Scholar] [CrossRef]
- Prakash, M.; Balasubramaniam, P.; Lakshmanan, S. Synchronization of Markovian jumping inertial neural networks and its applications in image encryption. Neural Netw. 2016, 83, 86–93. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Perc, M.; Duan, Z.; Chen, G. Impact of delays and rewiring on the dynamics of small-world neuronal networks with two types of coupling. Phys. A Stat. Mech. Its Appl. 2010, 389, 3299–3306. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, G.; Perc, M. Synchronous Bursts on Scale-Free Neuronal Networks with Attractive and Repulsive Coupling. PLoS ONE 2011, 6, e15851. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, D.; Wang, Q.; Perc, M. Complex synchronous behavior in interneuronal networks with delayed inhibitory and fast electrical synapses. Phys. Rev. E 2012, 85, 061905. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Strukov, D.B.; Snider, G.S.; Stewart, D.R.; Williams, R.S. The missing memristor found. Nature 2008, 453, 80–83. [Google Scholar] [CrossRef]
- Jo, S.H.; Chang, T.; Ebong, I.; Bhadviya, B.B.; Mazumder, P.; Lu, W. Nanoscale memristor device as synapse in neuromorphic systems. Nano Lett. 2010, 10, 1297–1301. [Google Scholar] [CrossRef]
- Corinto, F.; Forti, M. Memristor Circuits: Flux–Charge Analysis Method. IEEE Trans. Circuits Syst. I Regul. Pap. 2016, 63, 1997–2009. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.; Sah, M.P.; Yang, C.; Roska, T.; Chua, L.O. Neural Synaptic Weighting with a Pulse-Based Memristor Circuit. IEEE Trans. Circuits Syst. I Regul. Pap. 2012, 59, 148–158. [Google Scholar] [CrossRef]
- Duan, S.; Hu, X.; Dong, Z.; Wang, L.; Mazumder, P. Memristor-Based Cellular Nonlinear/Neural Network: Design, Analysis, and Applications. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1202–1213. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Hu, J.; Zeng, Z. New Criteria on Global Stabilization of Delayed Memristive Neural Networks with Inertial Item. IEEE Trans. Cybern. 2020, 50, 2770–2780. [Google Scholar] [CrossRef] [PubMed]
- Sheng, Y.; Huang, T.; Zeng, Z.; Li, P. Exponential Stabilization of Inertial Memristive Neural Networks with Multiple Time Delays. IEEE Trans. Cybern. 2021, 51, 579–588. [Google Scholar] [CrossRef] [PubMed]
- Gong, S.; Yang, S.; Guo, Z.; Huang, T. Global exponential synchronization of inertial memristive neural networks with time-varying delay via nonlinear controller. Neural Netw. 2018, 102, 138–148. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.; Gong, S.; Huang, T. Finite-time synchronization of inertial memristive neural networks with time delay via delay-dependent control. Neurocomputing 2018, 293, 100–107. [Google Scholar] [CrossRef]
- Huang, D.; Jiang, M.; Jian, J. Finite-time synchronization of inertial memristive neural networks with time-varying delays via sampled-date control. Neurocomputing 2017, 266, 527–539. [Google Scholar] [CrossRef]
- Wei, R.; Cao, J.; Alsaedi, A. Finite-time and fixed-time synchronization analysis of inertial memristive neural networks with time-varying delays. Cogn. Neurodyn. 2018, 12, 121–134. [Google Scholar] [CrossRef]
- Tang, Y. Terminal sliding mode control for rigid robots. Automatica 1998, 34, 51–56. [Google Scholar] [CrossRef]
- Shen, Y.; Huang, Y. Uniformly Observable and Globally Lipschitzian Nonlinear Systems Admit Global Finite-Time Observers. IEEE Trans. Autom. Control 2009, 54, 2621–2625. [Google Scholar] [CrossRef]
- Forti, M.; Grazzini, M.; Nistri, P.; Pancioni, L. Generalized Lyapunov approach for convergence of neural networks with discontinuous or non-Lipschitz activations. Phys. D Nonlinear Phenom. 2006, 214, 88–99. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Tian, Y.; Hua, L.; Shi, K.; Zhong, S.; Wen, S. New Results on Finite-Time Synchronization Control of Chaotic Memristor-Based Inertial Neural Networks with Time-Varying Delays. Mathematics 2023, 11, 684. https://doi.org/10.3390/math11030684
Wang J, Tian Y, Hua L, Shi K, Zhong S, Wen S. New Results on Finite-Time Synchronization Control of Chaotic Memristor-Based Inertial Neural Networks with Time-Varying Delays. Mathematics. 2023; 11(3):684. https://doi.org/10.3390/math11030684
Chicago/Turabian StyleWang, Jun, Yongqiang Tian, Lanfeng Hua, Kaibo Shi, Shouming Zhong, and Shiping Wen. 2023. "New Results on Finite-Time Synchronization Control of Chaotic Memristor-Based Inertial Neural Networks with Time-Varying Delays" Mathematics 11, no. 3: 684. https://doi.org/10.3390/math11030684