
Automated Fire Extinguishing System Using a Deep Learning Based Framework
 ,
,  ,
,  and
and 
Abstract
:1. Introduction
1.1. Research Gap and Motivation
1.2. Objectives and Goal of the Study
- Fire detection is carried out using a CNN model configured to operate on the chosen fire dataset.
- A DL-based framework is developed and trained to automatically classify the fire scenarios.
- Human detection is carried out using Alex-net with a pre-trained set of data from the fire datasets with a human involved during fire accidents.
- A mobile robotic system with onboard sensors is employed for detecting the fire.
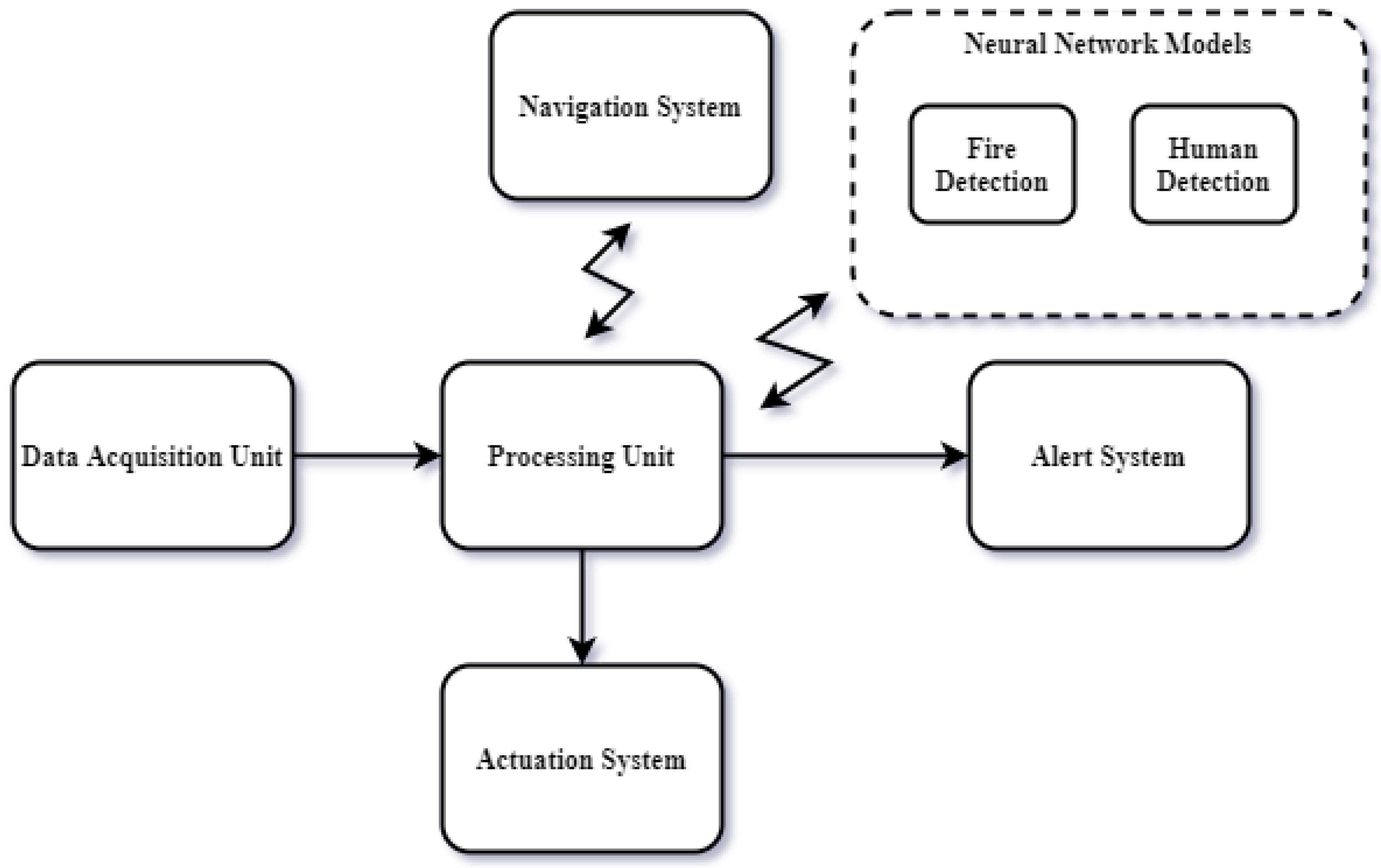
2. Proposed Framework
2.1. Learning-Based Automated Fire Extinguishing System
2.2. Fire Detection Model
2.2.1. Description of the Dataset
2.2.2. Proposed CNN Architecture
3. Analysis of Results and Discussion
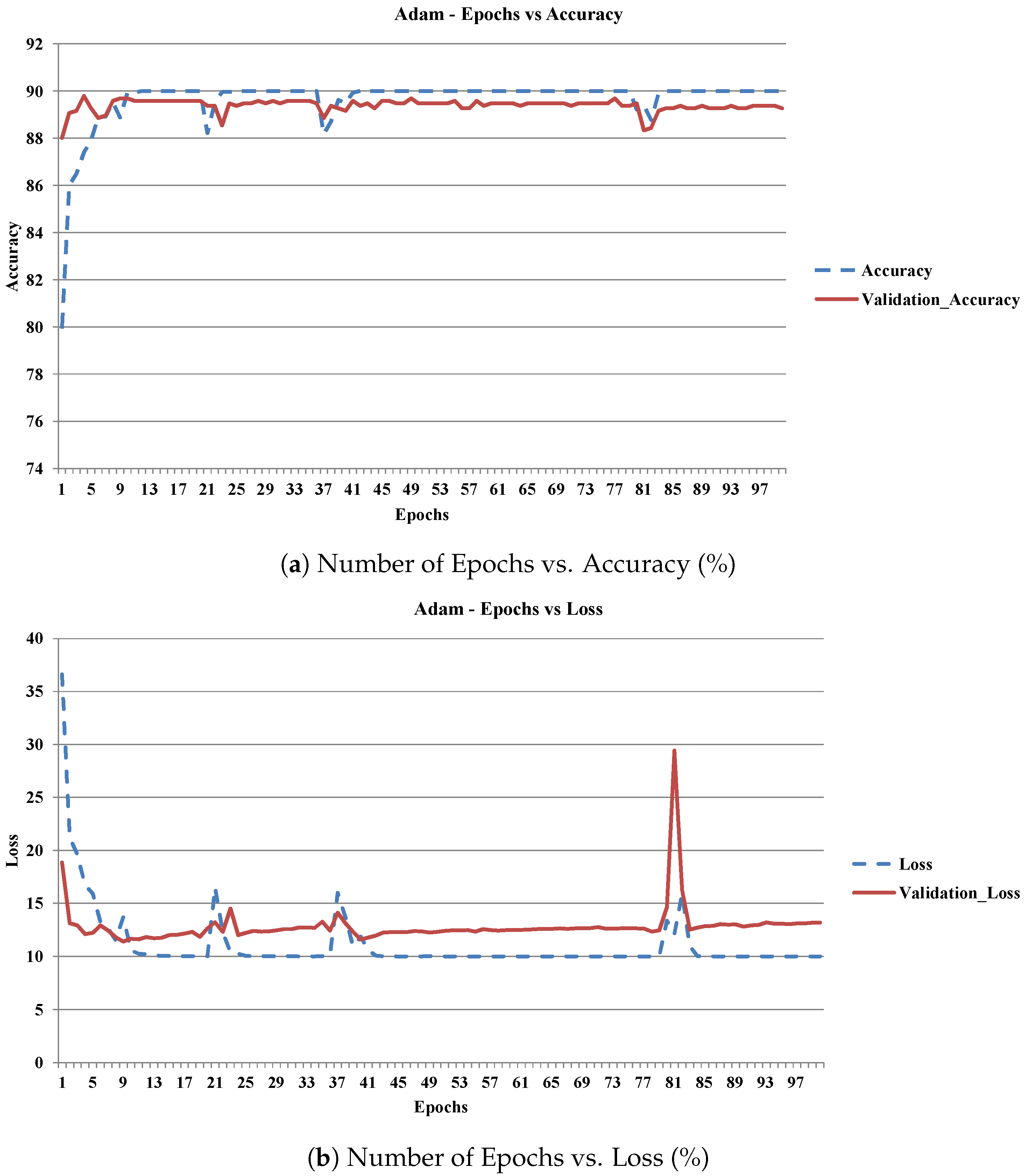
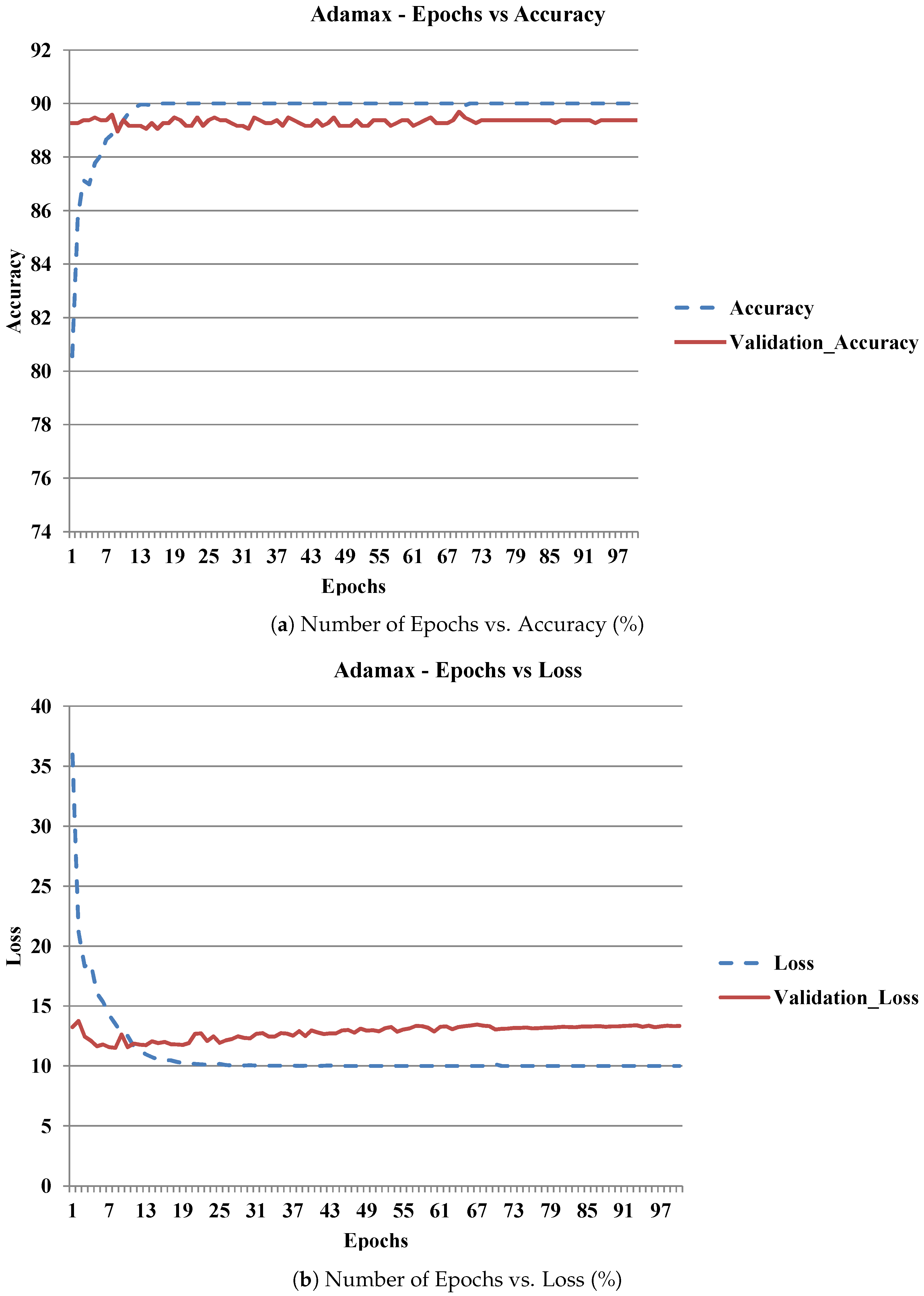
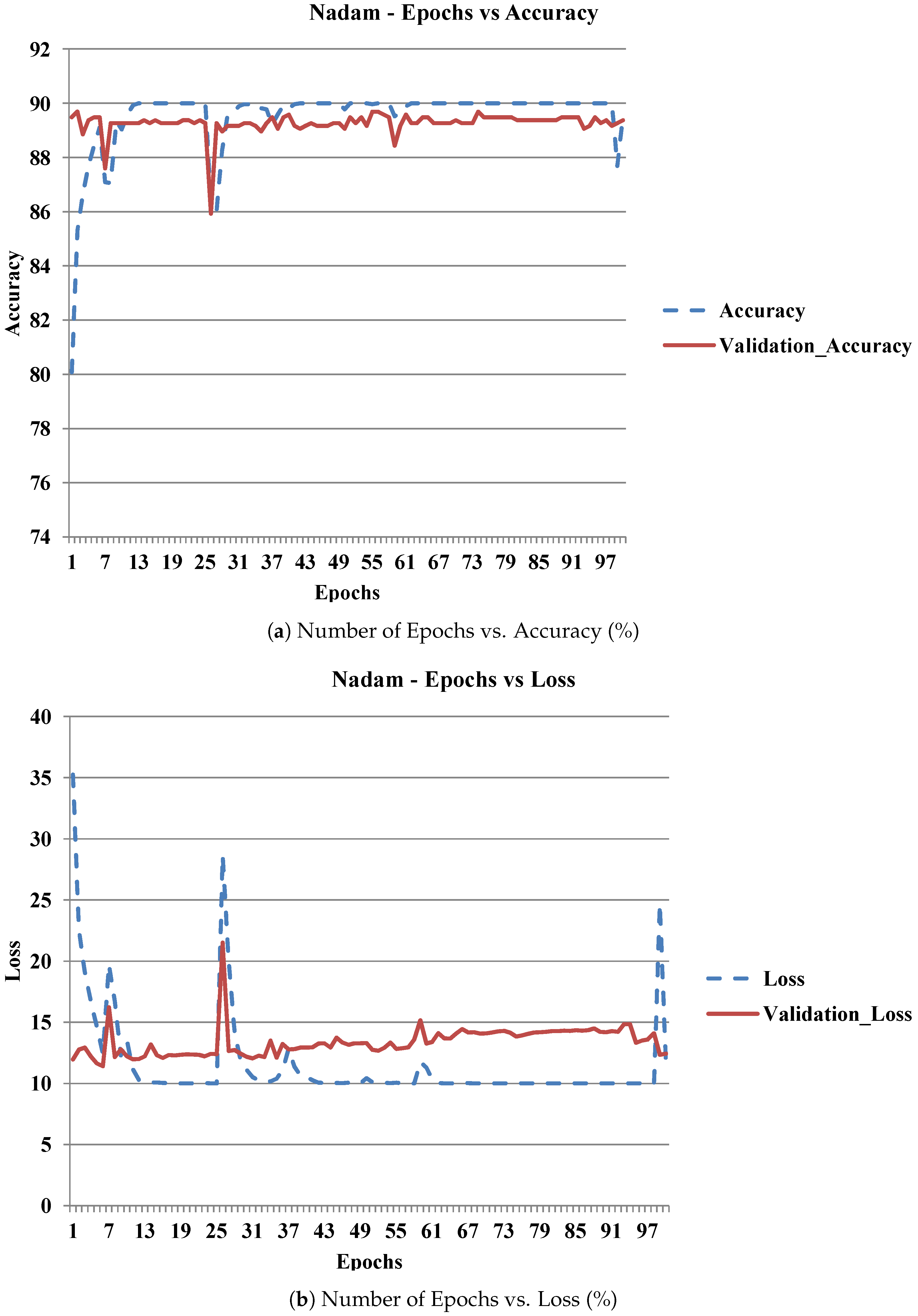
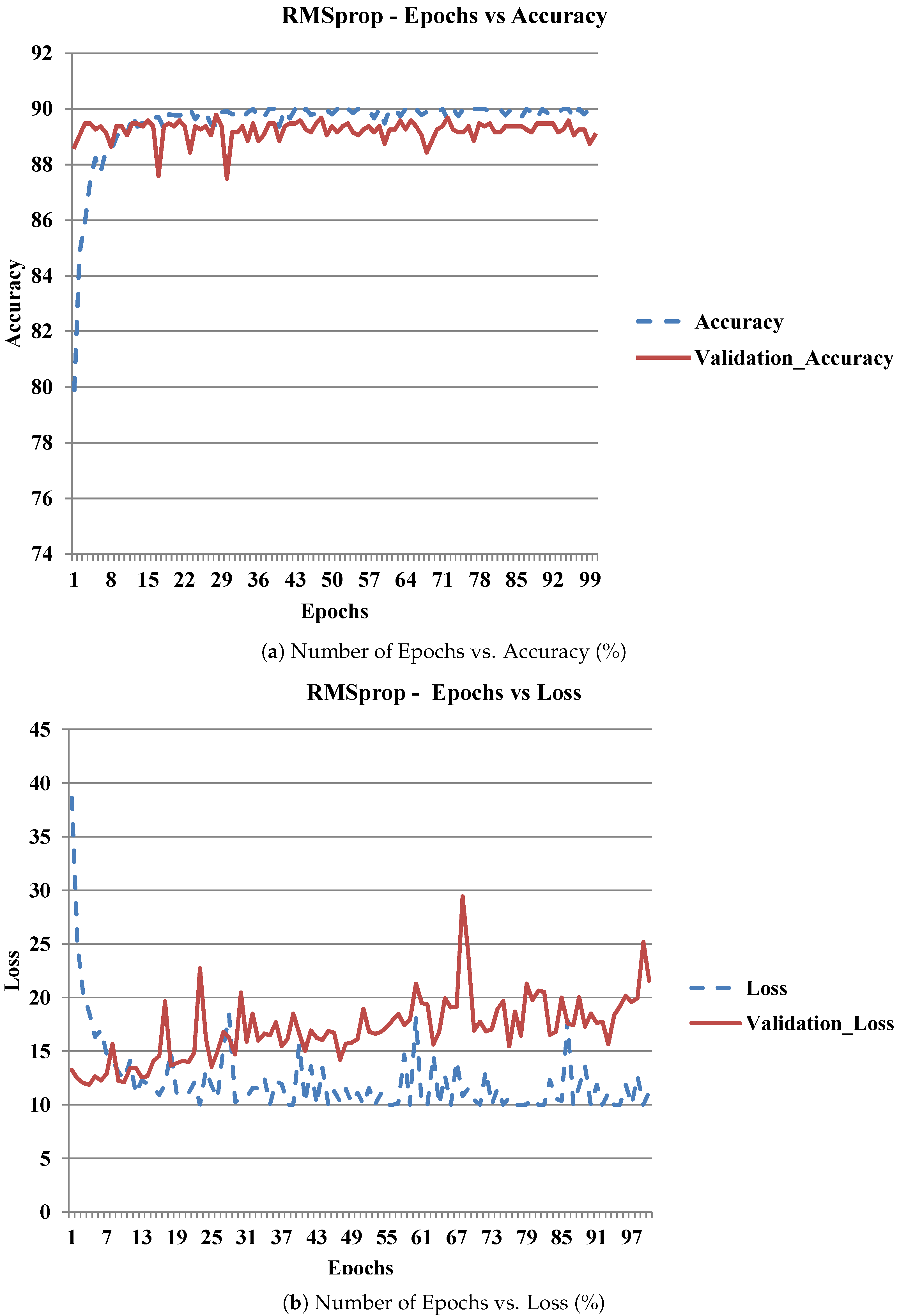
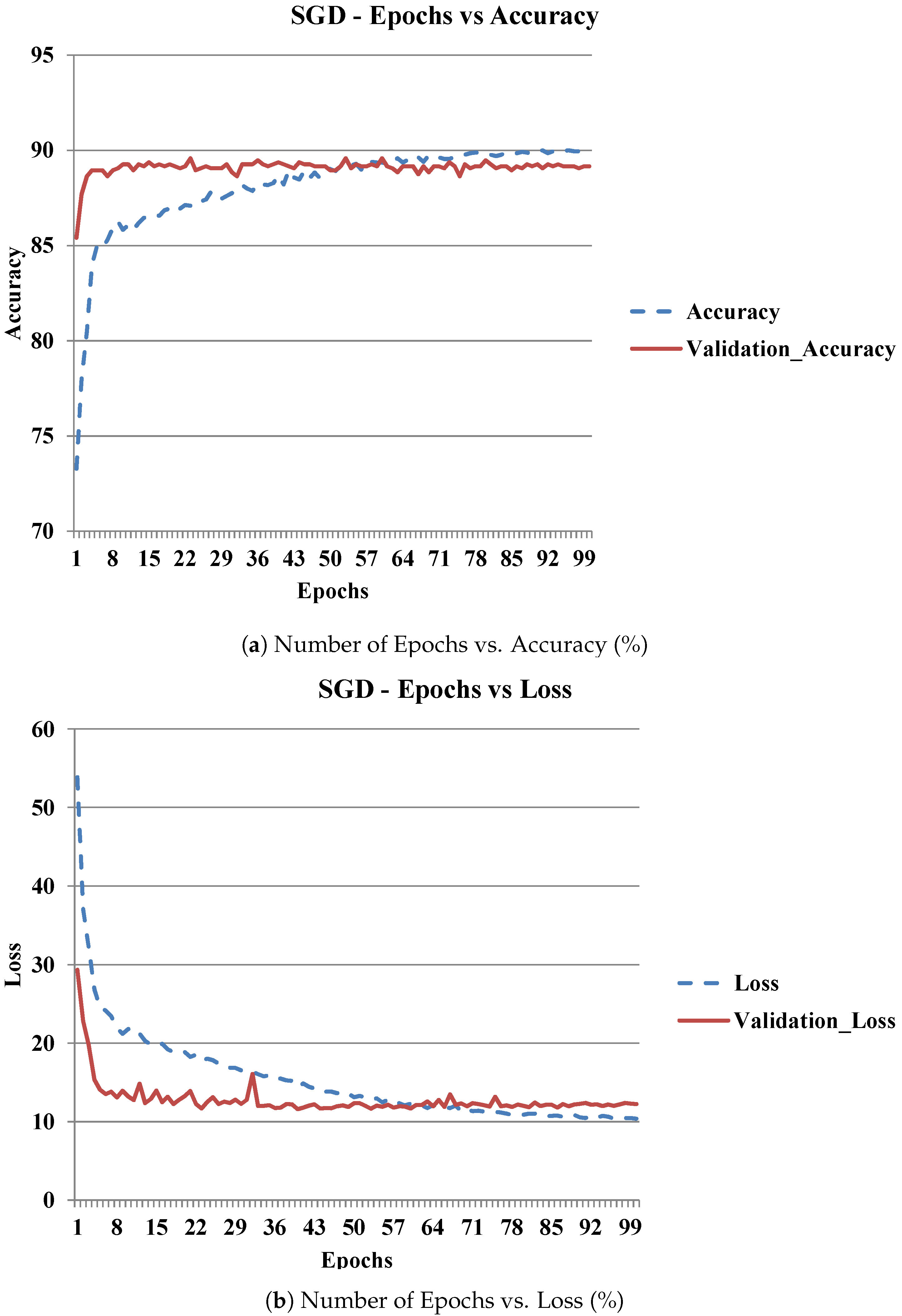
3.1. Optimizer Analysis
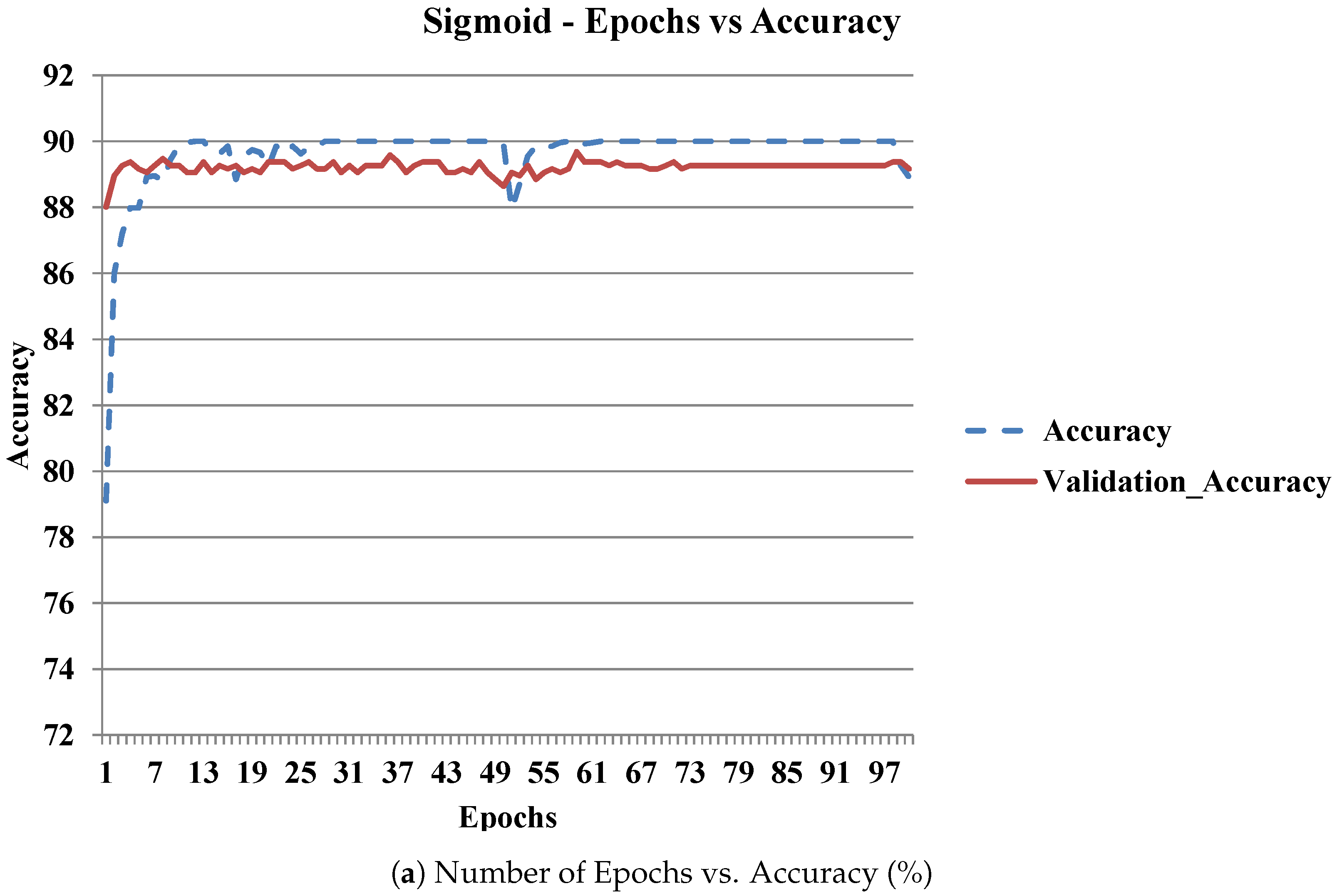
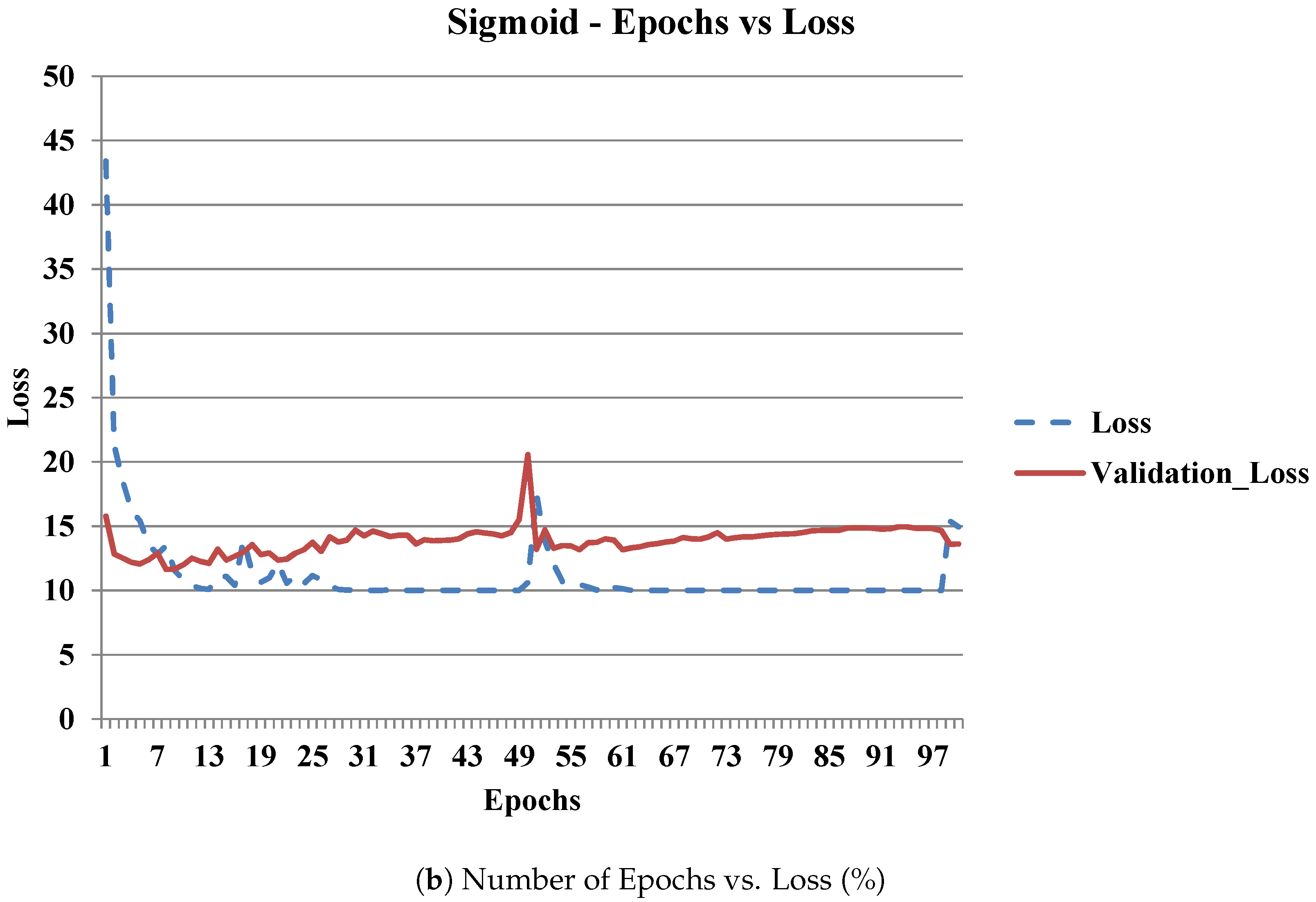
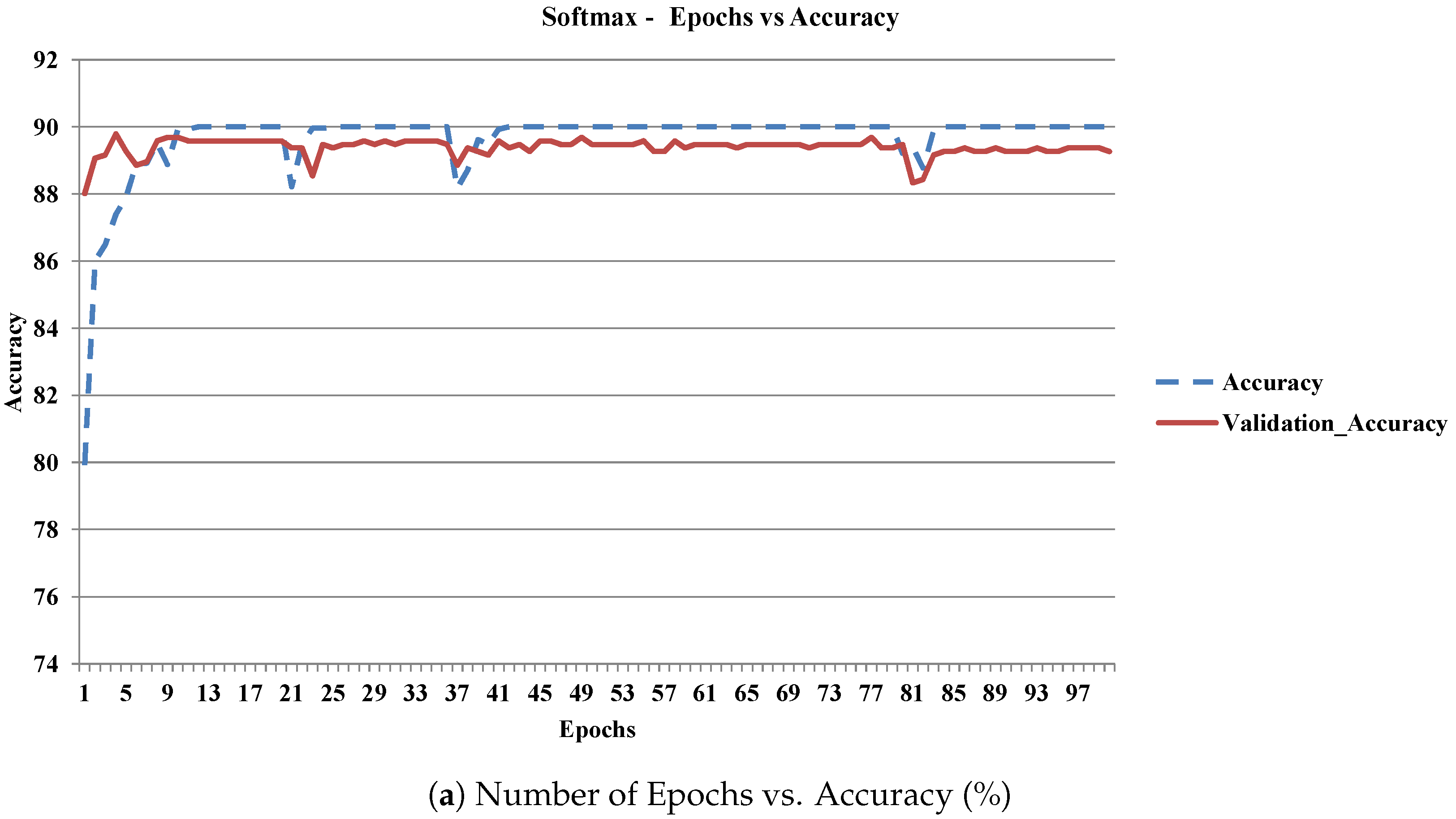
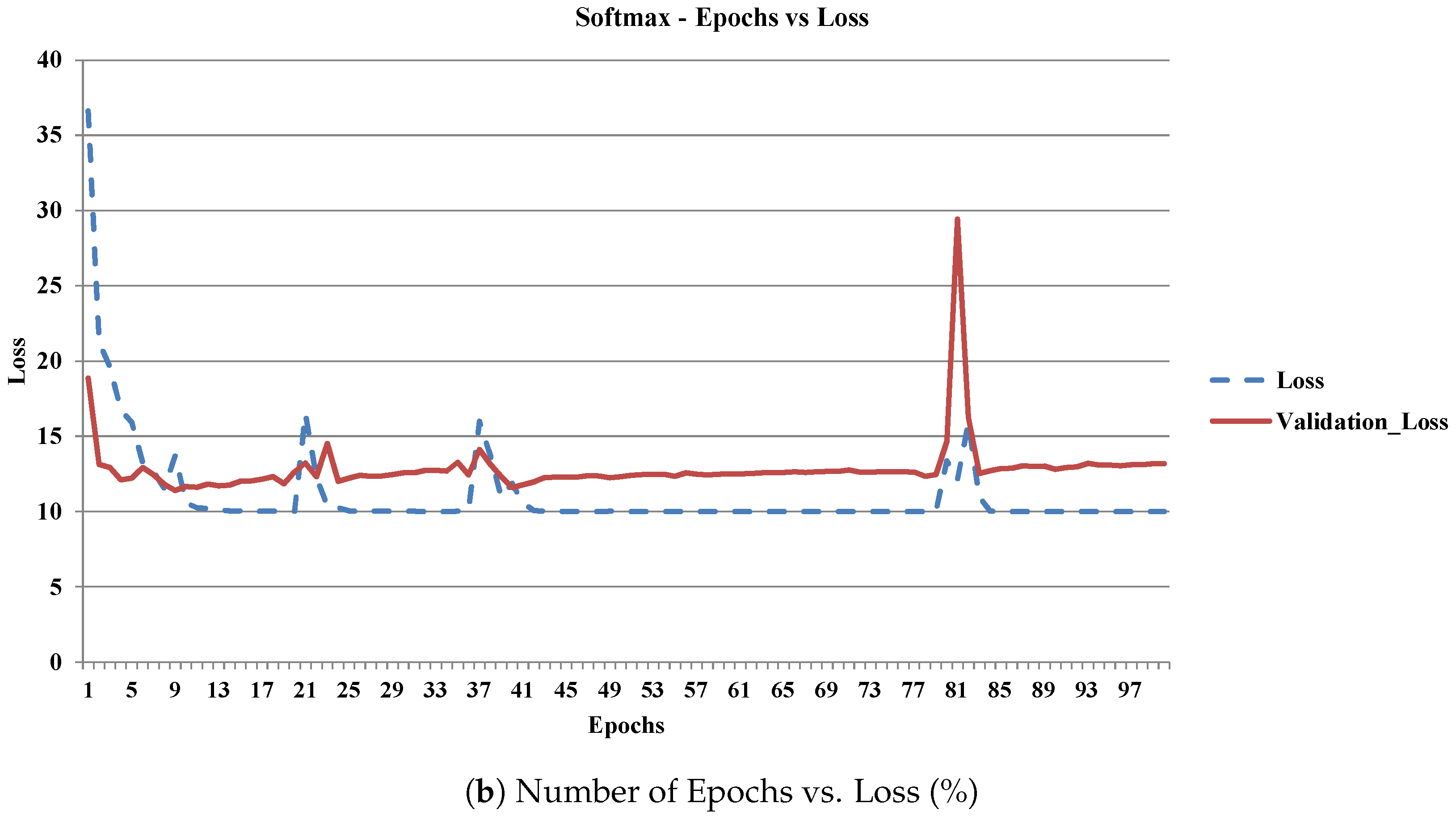
3.2. Activation Layer Analysis
3.3. Learning Rate Analysis
4. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tomar, J.S.; Kranjčić, N.; Đurin, B.; Kanga, S.; Singh, S.K. Forest fire hazards vulnerability and risk assessment in Sirmaur district forest of Himachal Pradesh (India): A geospatial approach. ISPRS Int. J. Geo-Inf. 2021, 10, 447. [Google Scholar] [CrossRef]
- de Dios, V.R.; Camprubí, À.C.; Pérez-Zanón, N.; Peña, J.C.; Del Castillo, E.M.; Rodrigues, M.; Yao, Y.; Yebra, M.; Vega-García, C.; Boer, M.M. Convergence in critical fuel moisture and fire weather thresholds associated with fire activity in the pyroregions of Mediterranean Europe. Sci. Total Environ. 2022, 806, 151462. [Google Scholar] [CrossRef] [PubMed]
- Nielsen, M.B.; Bojsen-Hansen, M.; Stamatelos, K.; Bridson, R. Physics-Based Combustion Simulation. ACM Trans. Graph. 2022, 41, 1–21. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, H.; Zhao, J.; Zhang, Y.; Hu, L. Experimental research on the effectiveness of different types of foam of extinguishing methanol/diesel pool fires. Combust. Sci. Technol. 2022, 1–19. [Google Scholar] [CrossRef]
- Lin, X.; Song, S.; Zhai, H.; Yuan, P.; Chen, M. Using catastrophe theory to analyze subway fire accidents. Int. J. Syst. Assur. Eng. Manag. 2020, 11, 223–235. [Google Scholar] [CrossRef]
- Majid, S.; Alenezi, F.; Masood, S.; Ahmad, M.; Gündüz, E.S.; Polat, K. Attention based CNN model for fire detection and localization in real-world images. Expert Syst. Appl. 2022, 189, 116114. [Google Scholar] [CrossRef]
- Allaire, F.; Mallet, V.; Filippi, J.B. Emulation of wildland fire spread simulation using deep learning. Neural Netw. 2021, 141, 184–198. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef] [Green Version]
- Bulatov, K.; Chukalina, M.; Buzmakov, A.; Nikolaev, D.; Arlazarov, V.V. Monitored reconstruction: Computed tomography as an anytime algorithm. IEEE Access 2020, 8, 110759–110774. [Google Scholar] [CrossRef]
- Arlazarov, V.; Arlazarov, V.; Bulatov, K.; Chernov, T.; Nikolaev, D.; Polevoy, D.; Sheshkus, A.; Skoryukina, N.; Slavin, O.; Usilin, S. Mobile ID Document Recognition–Coarse-to-Fine Approach. Pattern Recognit. Image Anal. 2022, 32, 89–108. [Google Scholar] [CrossRef]
- Lee, Y.; Shim, J. False positive decremented research for fire and smoke detection in surveillance camera using spatial and temporal features based on deep learning. Electronics 2019, 8, 1167. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.; Lee, J. A video-based fire detection using deep learning models. Appl. Sci. 2019, 9, 2862. [Google Scholar] [CrossRef] [Green Version]
- Govil, K.; Welch, M.L.; Ball, J.T.; Pennypacker, C.R. Preliminary results from a wildfire detection system using deep learning on remote camera images. Remote Sens. 2020, 12, 166. [Google Scholar] [CrossRef] [Green Version]
- Ali, L.; Alnajjar, F.; Jassmi, H.A.; Gocho, M.; Khan, W.; Serhani, M.A. Performance evaluation of deep CNN-based crack detection and localization techniques for concrete structures. Sensors 2021, 21, 1688. [Google Scholar] [CrossRef] [PubMed]
- Navaneeth, B.; Suchetha, M. PSO optimized 1-D CNN-SVM architecture for real-time detection and classification applications. Comput. Biol. Med. 2019, 108, 85–92. [Google Scholar] [CrossRef]
- Salameh, H.B.; Dhainat, M.; Benkhelifa, E. A survey on wireless sensor network-based IoT designs for gas leakage detection and fire-fighting applications. Jordanian J. Comput. Inf. Technol. 2019, 5, 60–73. [Google Scholar] [CrossRef]
- Zheng, R.; Lu, S.; Shi, Z.; Li, C.; Jia, H.; Wang, S. Research on the aerosol identification method for the fire smoke detection in aircraft cargo compartment. Fire Saf. J. 2022, 130, 103574. [Google Scholar] [CrossRef]
- Prasad, B.; Manjunatha, R. Internet of Things Based Monitoring System for Oil Tanks. In Proceedings of the 2021 IEEE International Conference on Mobile Networks and Wireless Communications (ICMNWC), Tumkur, India, 3–4 December 2021; pp. 1–7. [Google Scholar]
- Liu, X.; Zhang, C. Stability and Optimal Control of Tree-Insect Model under Forest Fire Disturbance. Mathematics 2022, 10, 2563. [Google Scholar] [CrossRef]
- Pereira, J.; Mendes, J.; Júnior, J.S.; Viegas, C.; Paulo, J.R. A Review of Genetic Algorithm Approaches for Wildfire Spread Prediction Calibration. Mathematics 2022, 10, 300. [Google Scholar] [CrossRef]
- Zhou, Y.C.; Hu, Z.Z.; Yan, K.X.; Lin, J.R. Deep learning-based instance segmentation for indoor fire load recognition. IEEE Access 2021, 9, 148771–148782. [Google Scholar] [CrossRef]
- Saied, A.; Ahmed Alef, H.S.A.S. Outdoor-Fire Images and Non-Fire Images for Computer Vision Tasks (Version 1) 2018. Available online: https://www.kaggle.com/datasets/phylake1337/fire-dataset (accessed on 11 October 2022).
- Scheuerman, M.K.; Hanna, A.; Denton, E. Do datasets have politics? Disciplinary values in computer vision dataset development. Proc. ACM Hum.-Comput. Interact. 2021, 5, 1–37. [Google Scholar] [CrossRef]
- Ghali, R.; Akhloufi, M.A.; Jmal, M.; Mseddi, W.S.; Attia, R. Forest fires segmentation using deep convolutional neural networks. In Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Melbourne, Australia, 17–20 October 2021; pp. 2109–2114. [Google Scholar]
- Liu, W.; Bao, Q.; Sun, Y.; Mei, T. Recent advances of monocular 2d and 3d human pose estimation: A deep learning perspective. ACM Comput. Surv. 2022, 55, 1–41. [Google Scholar] [CrossRef]
- Chernyshova, Y.S.; Sheshkus, A.V.; Arlazarov, V.V. Two-step CNN framework for text line recognition in camera-captured images. IEEE Access 2020, 8, 32587–32600. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Lv, Z.; Bellavista, P.; Yang, P.; Baik, S.W. Efficient deep CNN-based fire detection and localization in video surveillance applications. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1419–1434. [Google Scholar] [CrossRef]
- Khalil, A.; Rahman, S.U.; Alam, F.; Ahmad, I.; Khalil, I. Fire Detection Using Multi Color Space and Background Modeling. Fire Technol. 2021, 57, 1221–1239. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, W.; Gu, H.; Liu, C.; Hong, S.; Xu, W.; Yang, J.; Gui, G. Convolutional neural network based models for improving super-resolution imaging. IEEE Access 2019, 7, 43042–43051. [Google Scholar] [CrossRef]
- Muhammad, K.; Khan, S.; Elhoseny, M.; Ahmed, S.H.; Baik, S.W. Efficient fire detection for uncertain surveillance environment. IEEE Trans. Ind. Inform. 2019, 15, 3113–3122. [Google Scholar] [CrossRef]
- Smolin, A.; Yamaev, A.; Ingacheva, A.; Shevtsova, T.; Polevoy, D.; Chukalina, M.; Nikolaev, D.; Arlazarov, V. Reprojection-Based Numerical Measure of Robustness for CT Reconstruction Neural Network Algorithms. Mathematics 2022, 10, 4210. [Google Scholar] [CrossRef]
- Fang, Z.; Wang, J.; Du, J.; Hou, X.; Ren, Y.; Han, Z. Stochastic optimization-aided energy-efficient information collection in Internet of underwater things networks. IEEE Internet Things J. 2021, 9, 1775–1789. [Google Scholar] [CrossRef]
- Llugsi, R.; El Yacoubi, S.; Fontaine, A.; Lupera, P. Comparison between Adam, AdaMax and Adam W optimizers to implement a Weather Forecast based on Neural Networks for the Andean city of Quito. In Proceedings of the 2021 IEEE Fifth Ecuador Technical Chapters Meeting (ETCM), Cuenca, Ecuador, 12–15 October 2021; pp. 1–6. [Google Scholar]
- Syed, D.; Abu-Rub, H.; Ghrayeb, A.; Refaat, S.S.; Houchati, M.; Bouhali, O.; Bañales, S. Deep learning-based short-term load forecasting approach in smart grid with clustering and consumption pattern recognition. IEEE Access 2021, 9, 54992–55008. [Google Scholar] [CrossRef]
- Fradi, M.; Zahzah, E.h.; Machhout, M. Real-time application based CNN architecture for automatic USCT bone image segmentation. Biomed. Signal Process. Control. 2022, 71, 103123. [Google Scholar] [CrossRef]
- Halgamuge, M.N.; Daminda, E.; Nirmalathas, A. Best optimizer selection for predicting bushfire occurrences using deep learning. Nat. Hazards 2020, 103, 845–860. [Google Scholar] [CrossRef]
- Sevilla, J.; Heim, L.; Ho, A.; Besiroglu, T.; Hobbhahn, M.; Villalobos, P. Compute trends across three eras of machine learning. arXiv 2022, arXiv:2202.05924. [Google Scholar]
- Liu, J.; Sun, Y.; Gan, W.; Xu, X.; Wohlberg, B.; Kamilov, U.S. Sgd-net: Efficient model-based deep learning with theoretical guarantees. IEEE Trans. Comput. Imaging 2021, 7, 598–610. [Google Scholar] [CrossRef]
- Mei, S.; Chen, X.; Zhang, Y.; Li, J.; Plaza, A. Accelerating convolutional neural network-based hyperspectral image classification by step activation quantization. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–12. [Google Scholar] [CrossRef]
- Shu, W.; Cai, K.; Xiong, N.N. A short-term traffic flow prediction model based on an improved gate recurrent unit neural network. IEEE Trans. Intell. Transp. Syst. 2022, 23, 16654–16665. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimizer | Accuracy (%) | Validation Accuracy (%) | Loss (%) | Validation Loss (%) |
|---|---|---|---|---|
| Adam | 89.6463 | 89.3862 | 11.0794 | 12.8375 |
| Adamax | 89.7150 | 89.3163 | 10.8713 | 12.8152 |
| Nadam | 89.5313 | 89.2661 | 11.4997 | 13.3637 |
| RMSprop | 89.5390 | 89.2379 | 12.2243 | 17.0270 |
| SGD | 88.1809 | 89.0939 | 15.2573 | 12.7738 |
| Activation Function | Accuracy (%) | Validation Accuracy (%) | Loss (%) | Validation Loss (%) |
|---|---|---|---|---|
| Sigmoid | 89.6257 | 89.2181 | 11.2117 | 13.8817 |
| Softmax | 89.6462 | 89.3862 | 11.0794 | 12.8375 |
| Softplus | 88.3582 | 88.4686 | 18.0761 | 19.6317 |
| Learning Rate | Accuracy (%) | Validation Accuracy (%) | Loss (%) | Validation Loss (%) |
|---|---|---|---|---|
| 0.01 | 88.3164 | 88.7505 | 14.6927 | 14.9022 |
| 0.001 | 89.6462 | 89.3862 | 11.0794 | 12.8375 |
| 0.0001 | 89.5501 | 89.3503 | 11.4771 | 11.9575 |
| Learning Rate | Accuracy (%) | Validation Accuracy (%) | Loss (%) | Validation Loss (%) | Precision | Recall | F1-Score |
|---|---|---|---|---|---|---|---|
| 0.01 | 88.3164 | 88.7505 | 14.6927 | 14.9022 | 0.89 | 0.88 | 0.87 |
| 0.001 | 89.6462 | 89.3862 | 11.0794 | 12.8375 | 0.91 | 0.90 | 0.85 |
| 0.0001 | 89.5501 | 89.3503 | 11.4771 | 11.9575 | 0.90 | 0.89 | 0.86 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jagatheesaperumal, S.K.; Muhammad, K.; Saudagar, A.K.J.; Rodrigues, J.J.P.C. Automated Fire Extinguishing System Using a Deep Learning Based Framework. Mathematics 2023, 11, 608. https://doi.org/10.3390/math11030608
Jagatheesaperumal SK, Muhammad K, Saudagar AKJ, Rodrigues JJPC. Automated Fire Extinguishing System Using a Deep Learning Based Framework. Mathematics. 2023; 11(3):608. https://doi.org/10.3390/math11030608
Chicago/Turabian StyleJagatheesaperumal, Senthil Kumar, Khan Muhammad, Abdul Khader Jilani Saudagar, and Joel J. P. C. Rodrigues. 2023. "Automated Fire Extinguishing System Using a Deep Learning Based Framework" Mathematics 11, no. 3: 608. https://doi.org/10.3390/math11030608