
Practical Exponential Stability of Impulsive Stochastic Food Chain System with Time-Varying Delays

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Prilimary
- 1.
- For , the Model (2) is said to be pth moment practical exponential stability. If there exist positive constants , and such thatIn particular, when , Model (2) is said to be the pth moment exponential stability.
- 2.
- If and , a.s., then Model (2) is said to be pth moment extinction.
- 3.
- If and , a.s., then Model (2) is said to be pth moment persistence.
3. Global Positive Solutions
- (i)
- When , we haveThus,Take the derivative of both sides:Then,Similarly, we can obtain a stochastic equation for and in the form of (1.2) with the initial values and .
- (ii)
- When , we haveIn addition,Through proof (i) and (ii) above, we find that is a solution to (2). □
4. Practical Exponential Stability
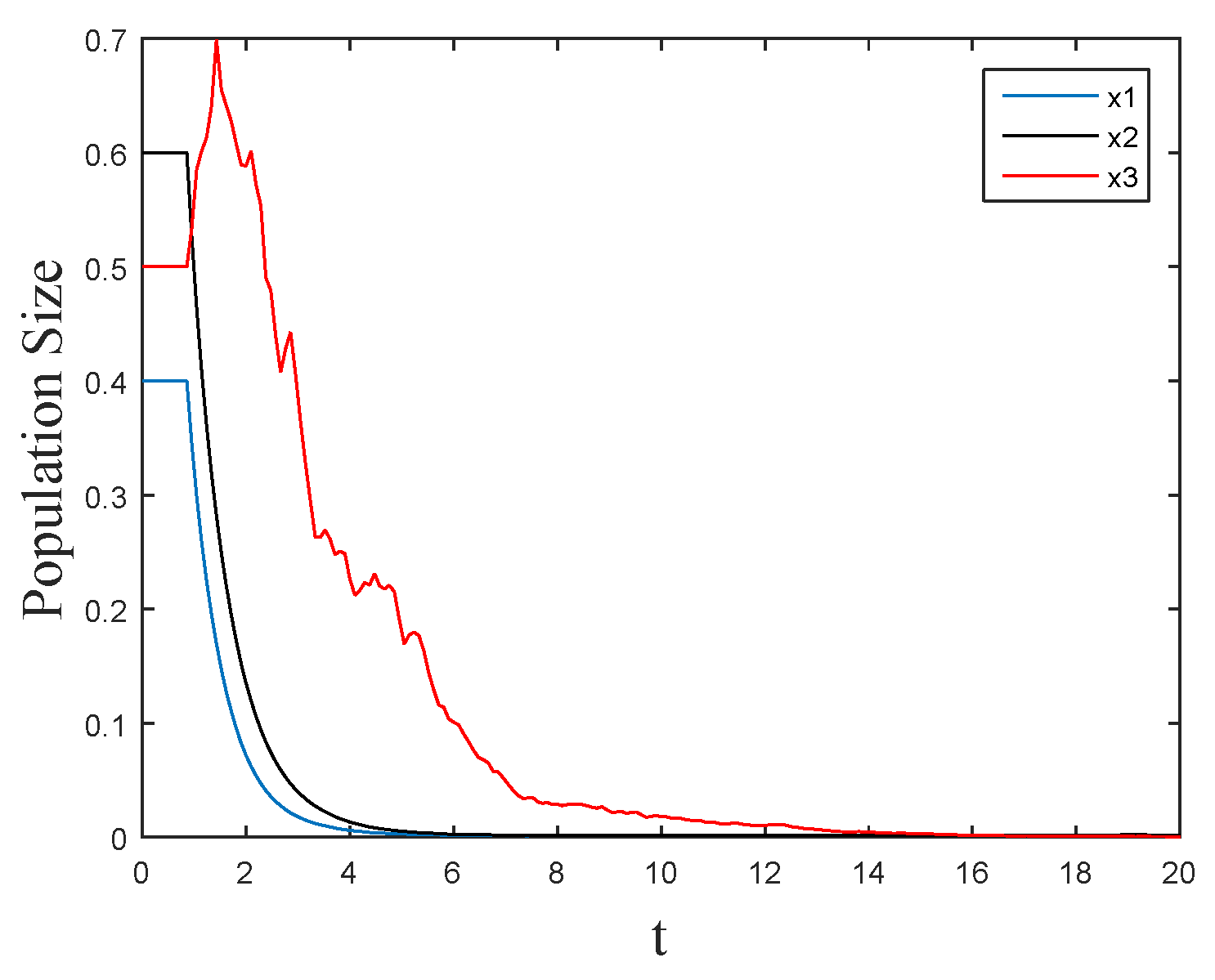
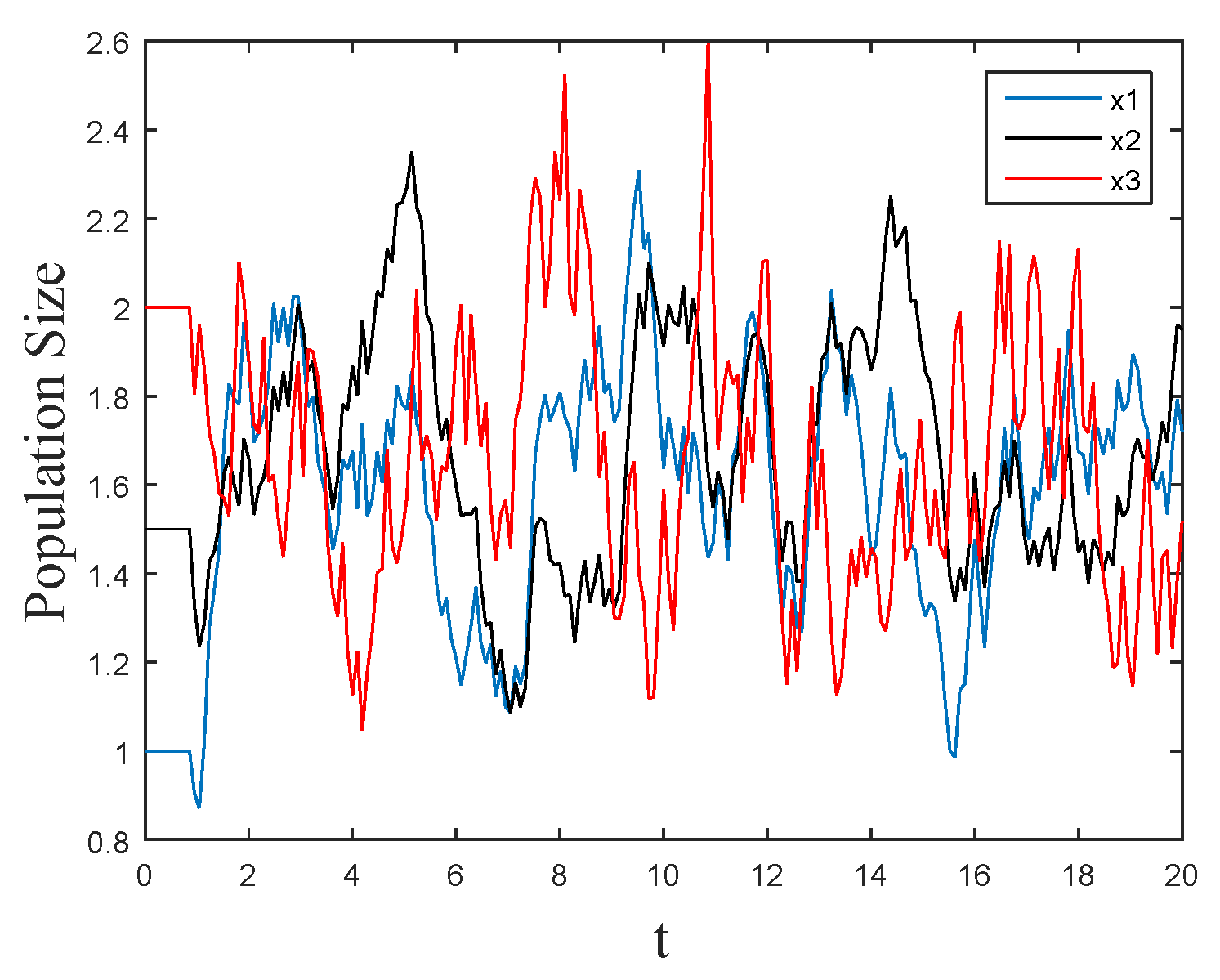
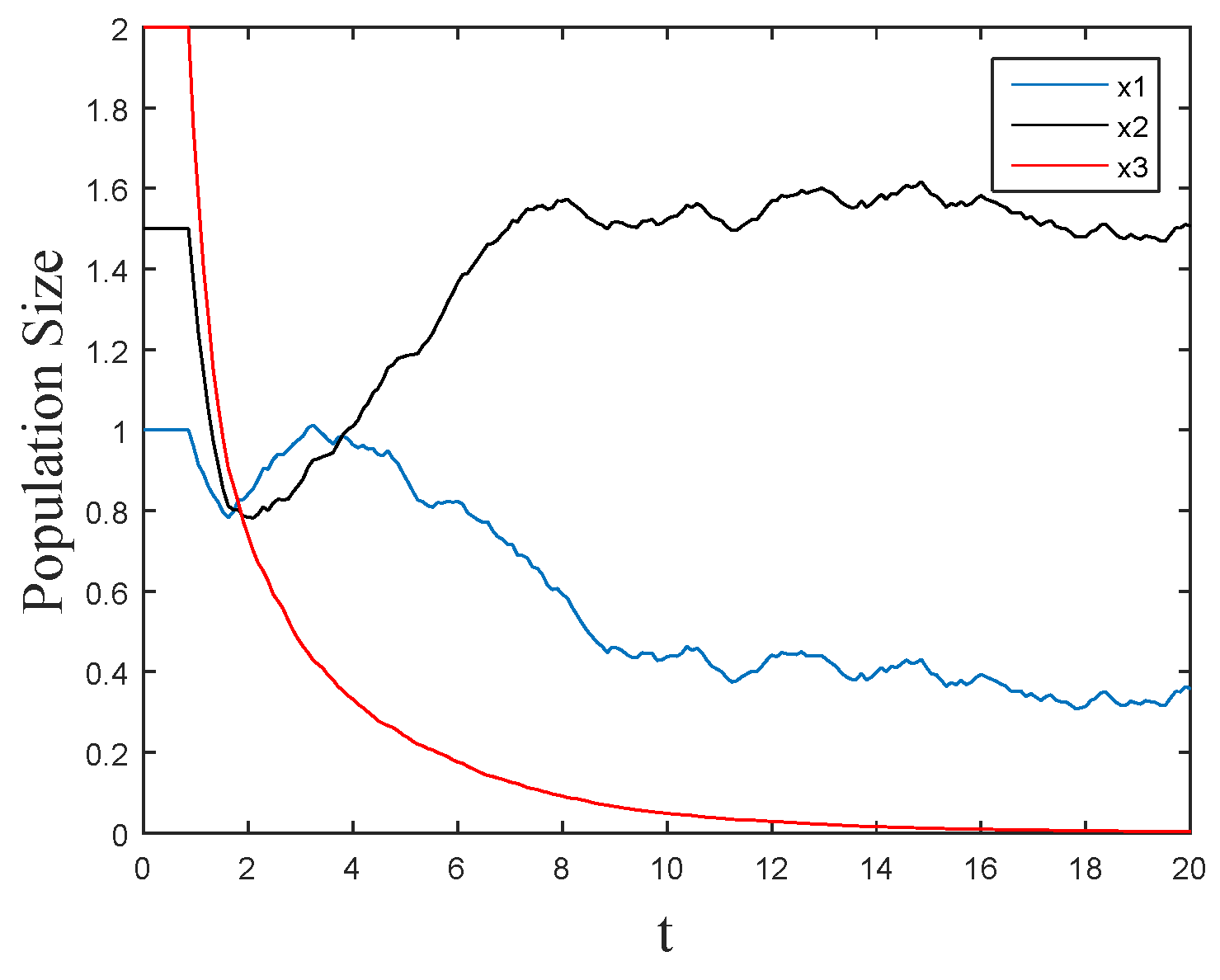
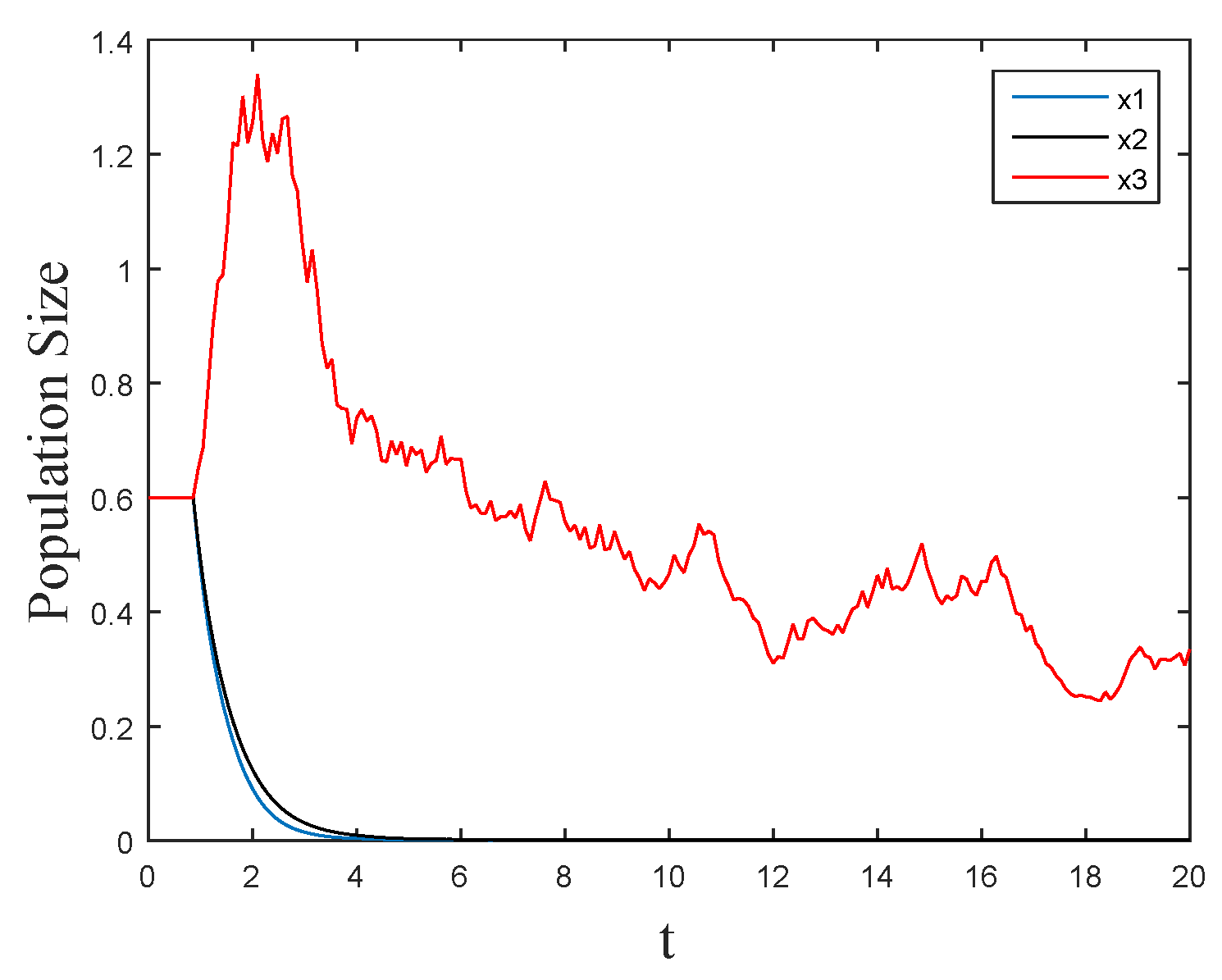
5. Numerical Examples
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yang, Q.; Zhang, X.; Jiang, D. Dynamical Behaviors of a Stochastic Food Chain System with Ornstein—Uhlenbeck Process. J. Nonlinear Sci. 2022, 32, 34. [Google Scholar] [CrossRef]
- Qiu, H.; Dong, W. Stationary distribution and global asymptotic stability of a three Stationary distribution and global asymptotic stability of a threespecies stochastic food-chain system. Turk. J. Math. 2017, 41, 5. [Google Scholar] [CrossRef]
- Gabriele, V.; Antonello, P. On-Off Intermittency in a Three-Species Food Chain. Mathematics 2021, 9, 1641. [Google Scholar]
- Bahar, A.; Mao, X. stochastic delay Lotka-Volterra model. J. Math. Anal. Appl. 2004, 292, 364–380. [Google Scholar] [CrossRef] [Green Version]
- Wu, J. Stability of a three-species stochastic delay predator-prey system with Lvy noise. Phys. A 2018, 502, 492–505. [Google Scholar] [CrossRef]
- Rui, H.; Zou, X.; Wang, K. Asymptotic behavior of a stochastic non-autonomous predator-prey model with impulsive perturbations. Commun. Nonlinear Sci. Numer. Simul. 2015, 20, 965–974. [Google Scholar]
- Ahmad, S.; Stamova, I. Almost necessary and sufficient conditions for survival of species. Nonlinear Anal. Real World Appl. 2004, 5, 219–229. [Google Scholar] [CrossRef]
- Freedman, H.; Waltman, P. Mathematical analysis of some three-species food-chain models. Math. Biosci. 1977, 33, 257–276. [Google Scholar] [CrossRef]
- Bainov, D.; Simeonov, P. Impulsive Difffferential Equations Periodic Solutions and Applications; Longman: Harlow, UK, 1993. [Google Scholar]
- Li, X.; Cao, J. An Impulsive Delay Inequality Involving Unbounded Time-Varying Delay and Applications. IEEE Trans. Autom. Control 2017, 62, 3618–3625. [Google Scholar] [CrossRef]
- Lu, C.; Chen, J.; Fan, X.; Zhang, L. Dynamics and simulations of a stochastic predator-prey model with infinite delay and impulsive perturbations. J. Appl. Math. Comput. 2017, 57, 437–465. [Google Scholar] [CrossRef]
- Rao, R.; Lin, Z.; Ai, X.; Wu, J. Synchronization of Epidemic Systems with Neumann Boundary Value under Delayed Impulse. Mathematics 2022, 10, 2064. [Google Scholar] [CrossRef]
- Ahmad, S.; Stamova, I.M. Asymptotic stability of competitive systems with delays and impulsive perturbations. J. Math. Anal. Appl. 2007, 334, 686–700. [Google Scholar] [CrossRef]
- Alzabut, J.O.; Abdeljawad, T. On existence of a globally attractive periodic solution of impulsive delay logarithmic population model. Appl. Math. Comput. 2008, 198, 463–469. [Google Scholar] [CrossRef]
- He, M.; Chen, F. Dynamic behaviors of the impulsive periodic multi-species predator–prey system. Comput. Math. Appl. 2009, 57, 248–265. [Google Scholar] [CrossRef] [Green Version]
- Hou, J.; Teng, Z.; Gao, S. Permanence and global stability for nonautonomous N-species Lotka-Volterra competitive system with impulses. Nonlinear Anal. Real World Appl. 2015, 11, 1882–1896. [Google Scholar] [CrossRef]
- Baek, H. A food chain system with Holling type IV functional response and impulsive perturbations. Comput. Math. Appl. 2010, 60, 1152–1163. [Google Scholar] [CrossRef] [Green Version]
- Wang, Q.; Zhang, Y.; Wang, Z.; Ding, M.; Zhang, H. Periodicity and attractivity of a ratio-dependent Leslie system with impulses. J. Math. Anal. Appl. 2011, 376, 212–220. [Google Scholar] [CrossRef] [Green Version]
- Liu, M.; Wang, K. On a stochastic logistic equation with impulsive perturbations. Comput. Math. Appl. 2012, 63, 871–886. [Google Scholar] [CrossRef] [Green Version]
- Zuo, W.; Jiang, D. Periodic solutions for a stochastic non-autonomous Holling–Tanner predator–prey system with impulses. Nonlinear Anal. Hybrid Syst. 2016, 22, 191–201. [Google Scholar] [CrossRef]
- Lu, C.; Ding, X. Persistence and extinction of a stochastic logistic model with delays and impulsive perturbation. Acta Math. Sci. 2014, 34, 1551–1570. [Google Scholar] [CrossRef]
- Yao, Q.; Lin, P.; Wang, L.; Wang, Y. Practical Exponential Stability of Impulsive Stochastic Reaction–Diffusion Systems with Delays. IEEE Trans. Cybern. 2020, 52, 2687–2697. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Wang, L.; Wang, Y. The Periodic Solutions to a Stochastic Two-Prey One-Predator Population Model with Impulsive Perturbations in a Polluted Environment. Methodol. Comput. Appl. Probab. 2021, 23, 859–872. [Google Scholar] [CrossRef]
- Hu, W.; Zhu, Q. Moment exponential stability of stochastic nonlinear delay systems with impulse effects at random times. Int. J. Robust Nonlinear Control 2018, 29, 3809–3820. [Google Scholar] [CrossRef]
- Wang, Q.; Liu, X. Impulsive stabilization of delay differential systems via the Lyapunov–Razumikhin method. Appl. Math. Lett. 2007, 20, 839–845. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Xu, D. Stability Analysis and Design of Impulsive Control Systems with Time Delay. IEEE Trans. Autom. Control 2007, 52, 1448–1454. [Google Scholar] [CrossRef]
- Guo, Y.; Zhu, Q.; Wang, F. Stability analysis of impulsive stochastic functional differential equations. Commun. Nonlinear Sci. Numer. Simul. 2019, 82, 105013. [Google Scholar] [CrossRef]
- Cheng, P.; Deng, F.; Yao, F. Exponential stability analysis of impulsive stochastic functional differential systems with delayed impulses. Commun. Nonlinear Sci. Numer. Simul. 2014, 19, 2104–2114. [Google Scholar] [CrossRef]
- Cheng, P.; Deng, F.; Yao, F. Almost sure exponential stability and stochastic stabilization of stochastic differential systems with impulsive effects. Nonlinear Anal. Hybrid Syst. 2018, 30, 106–117. [Google Scholar] [CrossRef]
- Peng, S.; Jia, B. Some criteria on p-th moment stability of impulsive stochastic functional differential equations. Stat. Probab. Lett. 2010, 80, 1085–1092. [Google Scholar] [CrossRef]
- Peng, S.; Zhang, Y. Razumikhin-Type Theorems on pth Moment Exponential Stability of Impulsive Stochastic Delay Differential Equations. IEEE Trans. Autom. Control 2010, 55, 1917–1922. [Google Scholar] [CrossRef]
- Hu, W.; Zhu, Q.; Karimi, H.R. Some Improved Razumikhin Stability Criteria for Impulsive Stochastic Delay Differential Systems. IEEE Trans. Autom. Control 2019, 64, 5207–5213. [Google Scholar] [CrossRef]
- Hu, W.; Zhu, Q. Stability analysis of impulsive stochastic delayed differential systems with unbounded delays. Syst. Control. Lett. 2020, 136, 104–606. [Google Scholar] [CrossRef]
- Lu, C.; Ding, X. Persistence and extinction of an impulsive stochastic logistic model with infinite delay. Osaka J. Math. 2018, 53, 1–29. [Google Scholar]
- Caraballo, T.; Hammami, M.A.; Mchiri, L. Practical Asymptotic Stability of Nonlinear Stochastic Evolution Equations. Stoch. Anal. Appl. 2013, 32, 77–87. [Google Scholar] [CrossRef] [Green Version]
- Caraballo, T.; Hammami, M.A.; Mchiri, L. On the practical global uniform asymptotic stability of stochastic differential equations. Stochastics 2016, 88, 45–56. [Google Scholar] [CrossRef]
- Caraballo, T.; Hammamib, M.; Mchirib, L. Practical exponential stability of impulsive stochastic functional differential equations. Syst. Control Lett. 2017, 109, 43–48. [Google Scholar] [CrossRef]
- Peng, S.; Zhu, X. Necessary and sufficient condition for comparison theorem of 1- dimensional stochasti cdifferential equations. Stoch. Process. Appl. 2006, 116, 370–380. [Google Scholar] [CrossRef] [Green Version]
- Hung, L.C. Stochastic delay population systems. Appl. Anal. 2009, 88, 1303–1320. [Google Scholar] [CrossRef]
- Mao, X.; Marion, G.; Renshaw, E. Environmental Brownian noise suppresses explosion in population dynamics. Stoch. Process Appl. 2002, 97, 95–110. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Wang, L. Practical Exponential Stability of Impulsive Stochastic Food Chain System with Time-Varying Delays. Mathematics 2023, 11, 147. https://doi.org/10.3390/math11010147
Zhao Y, Wang L. Practical Exponential Stability of Impulsive Stochastic Food Chain System with Time-Varying Delays. Mathematics. 2023; 11(1):147. https://doi.org/10.3390/math11010147
Chicago/Turabian StyleZhao, Yuxiao, and Linshan Wang. 2023. "Practical Exponential Stability of Impulsive Stochastic Food Chain System with Time-Varying Delays" Mathematics 11, no. 1: 147. https://doi.org/10.3390/math11010147