1. Introduction
Complex networks are ubiquitous and the dynamic behaviors of considerable real systems in society can be simulated by complex network models [
1]. Nowadays, complex networks have been acquired wide attention in different branches of science and engineering. In addition, many real network systems, such as power grid [
2], communication network [
3], image protection [
4], and genetic regulatory network [
5], are always subject to various instantaneous disturbances caused by burst noises, frequency changes, etc., which lead to abrupt changes of system states at some certain instants and finally form the impulsive phenomenon. In 1960, Miliman et al. initially studied stability of motion with impulse [
6]. Afterwards, complex networks with impulse have naturally attracted widespread attention [
7,
8,
9].
As is well known, many practical systems are sophisticated and nonlinear, it is thus difficult to explore the dynamic characteristics of those systems by means of conventional analysis methods and control strategies [
10,
11]. For this topic, Takagi and Sugeno proposed a fuzzy model, i.e., T-S fuzzy model [
12], which has universal function approximation capability and can approximate any smooth nonlinear function on any convex compact domain [
13]. Furthermore, the T-S fuzzy controller is a versatile controller, because a T-S fuzzy controller can always be found to stabilize the nonlinear system [
14]. Recently, much attention has been carried out on the dynamic analysis of various T-S fuzzy systems, including filtering [
15,
16], stability [
17,
18], stabilization [
19,
20], synchronization [
21,
22,
23] and so forth.
As one of the most fundamental subjects in analysis and control for various systems, synchronization has acquired widespread concern in recent decades. Generally, synchronization refers to the consensus feature of nodes’ dynamics driven by interaction of nodes or forced by additional control [
24,
25,
26]. So far, many valuable results about synchronization of deterministic fuzzy complex networks (FCNs) have been reported [
27,
28,
29,
30]. For instance, the finite-time cluster synchronization for T-S fuzzy complex networks with discontinuous subsystems and probabilistic coupling delays was concerned based on T-S fuzzy interpolation approach and Fillipov solution [
27]. Moreover, the synchronization of T-S fuzzy complex networks was analyzed in [
28,
29,
30] via applying sampling control and adaptive fuzzy control, respectively. Diversely, the influence of impulse on FCNs is considered and excellent achievements have been obtained [
31,
32]. For example, the exponential pinning synchronization of stochastic T-S fuzzy delayed complex networks with heterogeneous impulsive delays was discussed based on fuzzy memory pinning impulsive control method in [
31]. The synchronization conditions for fuzzy-based complex networks with different switching topologies and time-varying delays were established in [
32] via applying fuzzy impulsive control strategy. Significantly, these researches mainly focus on the asymptotic synchronization based on the traditional asymptotic stability theory, which indicates that network synchronization only happens when the time goes to infinity.
In many practical problems, such as image encryption and communication security, it is popular to realize performance control in finite time. Considering the fact, various finite-time techniques have been proposed to explore the synchronization about impulsive networks [
33,
34], where the synchronized time (ST) is associated with the initial states of networks. Regretfully, it is unrealistic to access all system’s initial states in many engineering problems, so it is extremely difficult to estimate the settling time. To eliminate the dependence on the initial states, fixed-time (FT) synchronization for impulsive complex networks (ICNs) was proposed [
35,
36,
37,
38,
39], where the synchronization rate is improved compared with asymptotic synchronization and the relevance between the ST and the initial states is avoided compared with finite-time synchronization. Especially, the synchronization of ICNs was analyzed in [
36] via applying fixed-time stability theory and fixed-time control protocols, in which the estimation of the synchronized time is more accurate than the work [
35]. The FT synchronization conditions of delayed complex systems with stochastic perturbation were established in [
37] by means of novel impulsive pinning control strategy. Recently, by virtue of non-chattering control scheme, and conceiving a novel time-dependent Lyapunov function, the FT stochastic synchronization for multi-weighted impulsive complex dynamical networks was investigated in [
38]. The FT synchronization of time-varying delayed impulsive networks with discontinuous activation functions was analyzed in [
39] based on generalized variable transformation with suitable tunable variables and differential inclusion theory. Nevertheless, there seems to be no related reports about the FT synchronization of fuzzy-based impulsive complex networks (FICNs). Thus, it is urgent and worthy to be deeply studied to develop some innovative control protocols and analysis techniques to explore the FT synchronization of FICNs.
Enlightened by the above analysis, the FT synchronization of FICNs will be deeply addressed. The innovations of the paper are mainly demonstrated as below.
- (1)
Since the T-S fuzzy rules and impulsive coupling are all considered, the FICNs in this article complement and extend the models without fuzzy rules in [
35,
36,
37,
38,
39,
40] and FCNs without impulse [
27,
28,
29,
30].
- (2)
An improved fixed-time stability theorem is developed for impulsive systems, where the more general linear term
is involved compared with [
36]. Furthermore, the subsequent control design can be simplified by using the stability theorem.
- (3)
A type of pure power-law control scheme is developed and some simple conditions are established based on the FT stability theorem to realize FT synchronization of FICNs. Note that the proposed control scheme here is a pure power-law form, which is simpler in comparison with the previous FT control design given in [
35,
36,
37,
38,
39,
40], in which both the linear part and the power-law term are involved.
The remainder of the work is arranged as below. The model of FICNs and some related basic results are provided in
Section 2. The FT synchronization is investigated for FICNs in
Section 3. A numerical example is provided to validate the theoretical results in
Section 4. Ultimately, the results of the paper are summarized.
Notations: In this paper, the sets of non-negative integers and real numbers are respectively denoted by and . represents the n-dimensional Euclidean space, and is the set of all real matrices. for positive integer N. For a matrix A, its transpose is denoted as , its largest eigenvalue is represented as if it is symmetric. represents a diagonal matrix, and denotes the identity matrix with m dimension. For any , , .
2. Problem Description and Preliminaries
Since impulse effect is ubiquitous in network systems, the following fuzzy-based impulsive network is considered:
Rule
r: IF
is
,
…,
is
, THEN
where
M is the number of fuzzy IF-THEN rules,
and
are premise variables and fuzzy sets, respectively,
denotes the state variable of the node
q at time
t,
represents nonlinear dynamical function, function
,
is the internal coupling matrix,
is the coupling strength,
is the imposed control input on the
qth node,
is a sequence of strictly increasing impulsive instants,
is the strength of impulse,
,
,
, without loss of generality, we assume that
is right continuous at
, i.e.,
.
is the adjacency matrix, here
if there has an edge between node
j and node
q , otherwise,
, and
. Furthermore, the corresponding Laplacian matrix
is defined as
,
, the diagonal elements
. The initial condition is given by
.
Using the singleton fuzzifier, product fuzzy inference, and a weighted average defuzzifier [
12,
13], T-S fuzzy network (
1) is transformed into the following form
where
,
,
, and
denotes the grade of membership of
in
.
In addition, since and , then and .
Remark 1. At present, linear systems have been widely studied, but considerable practical systems are nonlinear, which makes the analysis of control problems extremely difficult [13]. However, Takagi and Sugeno [12] found that by using the qualitative and linguistic information of nonlinear dynamic systems, a set of fuzzy IF-THEN languages can be introduced to describe the local input-output relationship of nonlinear systems. Meanwhile, these local subsystems are fuzzy mixed through appropriate membership function, so that the whole fuzzy system model can be established. In view of this advantage, a kind of fuzzy-based impulsive coupling network (2) is considered in this paper. Consider the synchronous state satisfying the following equationin which is the state variable. The initial value is provided as . By setting , the error dynamic model is described bywhere . Assumption 1. There has a positive real number ω such that for any , Assumption 2. There exists a real number , such that for any , Definition 1 ([
41])
. The fuzzy-based impulsive network (2) is said to reach FT synchronization, provided that there exist two real numbers and such thatand for any , andis said to the synchronized time of network (2), where . Lemma 1 ([
42])
. If for , , thenConsider the following impulsive systemin which , and are continuous functions, and . Definition 2 ([
36])
. The scalar function defined on is called to belong to class if(i) It is locally Lipschitzian with respect to y and ;
(ii) It is positive definite and radially unbounded;
(iii) It is continuous on the interval with and .
Assumption 3 ([
35,
36])
. The impulsive time set , satisfying and , belongs to , in which , are positive constants.By Assumption 3, for any time interval , the number of impulsive jumps denoted by satisfies .
Lemma 2 ([
36])
. Considering system (5), assume that there exist a function and numbers , , , such thatthen for , here Lemma 3. Considering system (5), if there exist a function , and several constants , , , such thatthen for , here Proof. When
, let
, from the condition
,
which indicates that
for all
. So, the following impulsive comparison system is considered
Similar to the proof of Lemma 2 given in [
36],
and
for any
. □
Remark 2. The FT stability and the estimation of settling time are given in Lemma 2 when . Note that if system (5) has no impulse, i.e., , we can get , and by using the equivalent replacement,So, when , the ST is estimated asIn Lemma 3, similarly, when , the ST is evaluated by Remark 3. Compared with Lemma 2 given in [36], a general condition is provided in Lemma 3, in which the linear term is involved. It makes Lemma 3 more flexible and the subsequent control design more pithy. 3. Fixed-Time Synchronization
In this section, a T-S fuzzy control scheme is proposed to ensure FT synchronization of impulsive network (
2).
The following fixed-time fuzzy control strategy is designed:
Rule
r: IF
is
,
…,
is
, THEN
where
,
,
.
For any , and , denote
,
, ,
, .
Theorem 1. Based on Assumptions 1–3 and the control protocol (8), system (2) is fixed-time synchronized if there exists such thatMoreover, the settling-time is evaluated by Proof. Select the following Lyapunov function
When
, for any
,
Firstly, denote
with
, and according to Assumption 1, one has
In addition,
Using Lemma 1,
and
Therefore,
On the other hand, for
, it has
therefore,
According to (
9), one gets
When
, in view of Lemma 2, system (
2) achieves synchronization in a fixed time
. If
, system (
2) achieves synchronization within a fixed time
by utilizing Lemma 3. □
Especially, if impulsive dynamic network (
2) without fuzzy rules [
43,
44], the network model is changed into the following network
Correspondingly, the error dynamic model is described by
where
. At this point, the control strategy (
8) is reduced to the following form
with
,
,
.
Corollary 1. Under Assumptions 1–3 and the control protocol (16), if there exists such thatthen system (15) is FT synchronized. Besides, the ST is evaluated byHere , , . If any two nodes in fuzzy-based network (
2) are interconnected only at the impulsive time, then (
2) is converted to the following form
Remark 4. Notably, system (2) is a kind of network with mixed continuous coupling and impulse coupling. In this kind of network, the state information of a large number of nodes needs to be continuously transmitted, so there is a great possibility of communication congestion. However, the impulsive coupling mode is different, which requires less information to be transmitted through the network and occupies fewer communication channels. Considering this fact, the network model (18) with impulsive coupling only is introduced in this paper. According to Theorem 1, the following Corollary 2 can be easily derived.
Corollary 2. Based on Assumptions 1–3 and the control protocol (8), if there exists satisfying (9), then system (18) is FT synchronized at the fixed time , where When there is no impulsive interference, system (2) is changed into the following form Corollary 3. Under Assumptions 1 and 2 and the control protocol (8), systems (19) achieves FT synchronization, the ST is evaluated by Remark 5. In the existing results [27,28,29,30], the synchronization for fuzzy-based complex networks was investigated. Differently, Yang et al. [31] and Behinfaraz et al. [32] considered the impact of impulse on fuzzy-based complex networks. However, the above results are about the asymptotic and finite-time synchronization of fuzzy complex networks, in which the initial values need to be obtained in advance. Different from the above results, a fixed-time fuzzy control strategy is designed, and the synchronization of impulsive coupled network is deeply explored based on T-S fuzzy logic theory in this paper, in which the synchronization time is independent of the initial state of the system. Remark 6. In [36,37,39], FT synchronization has been discussed for complex networks with impulsive effect by designing the following hybrid control strategy composed of linear part and power-law term:where , , . Actually, the linear part is only to ensure asymptotic synchronization, while the power-law term is the core to achieve FT synchronization. Based on this idea, a new FT stability theorem is proposed for impulsive system in Lemma 3 to facilitate the design of pure power-law control scheme (8), and the FT synchronization of fuzzy-based impulsive coupled networks is also ensured under the new design in this paper. Evidently, our control design is simpler and effective. Remark 7. Over the years, there have been many excellent results on the synchronization of complex networks [33,34,35,36,37,38,39,40,41,45,46]. Specially, the influences of actuator saturation and stochastic coupling strength on the network were considered in [45]. Besides, the passivity-based synchronization for complex networks under Markovian jump parameters, actuator fault and random coupling delay was considered in [46]. In these articles, the effects of random perturbations on network dynamics are covered, which is more consistent with many real-world applications, since systems are often subject to unpredictable sudden changes and sudden environmental disturbances. Therefore, it is of practical significance to apply the methods of control design and theoretical analysis proposed in this paper to further study the fixed-time control of complex networks with random disturbances, which will be one of the directions of future research. 4. Numerical Example
To verify the above stability and synchronization results, two numerical examples and several related simulations are provided by using Matlab software in this part.
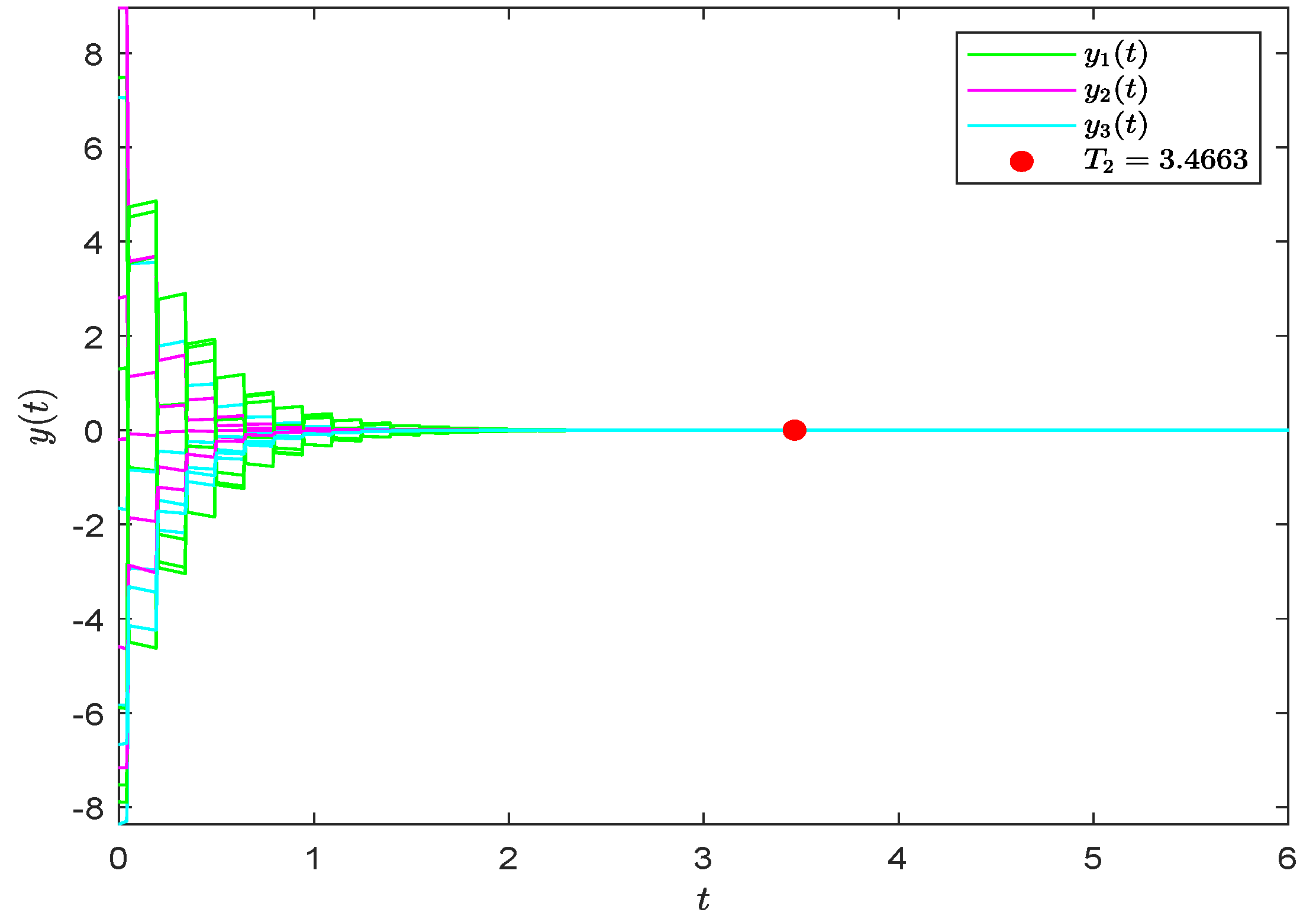
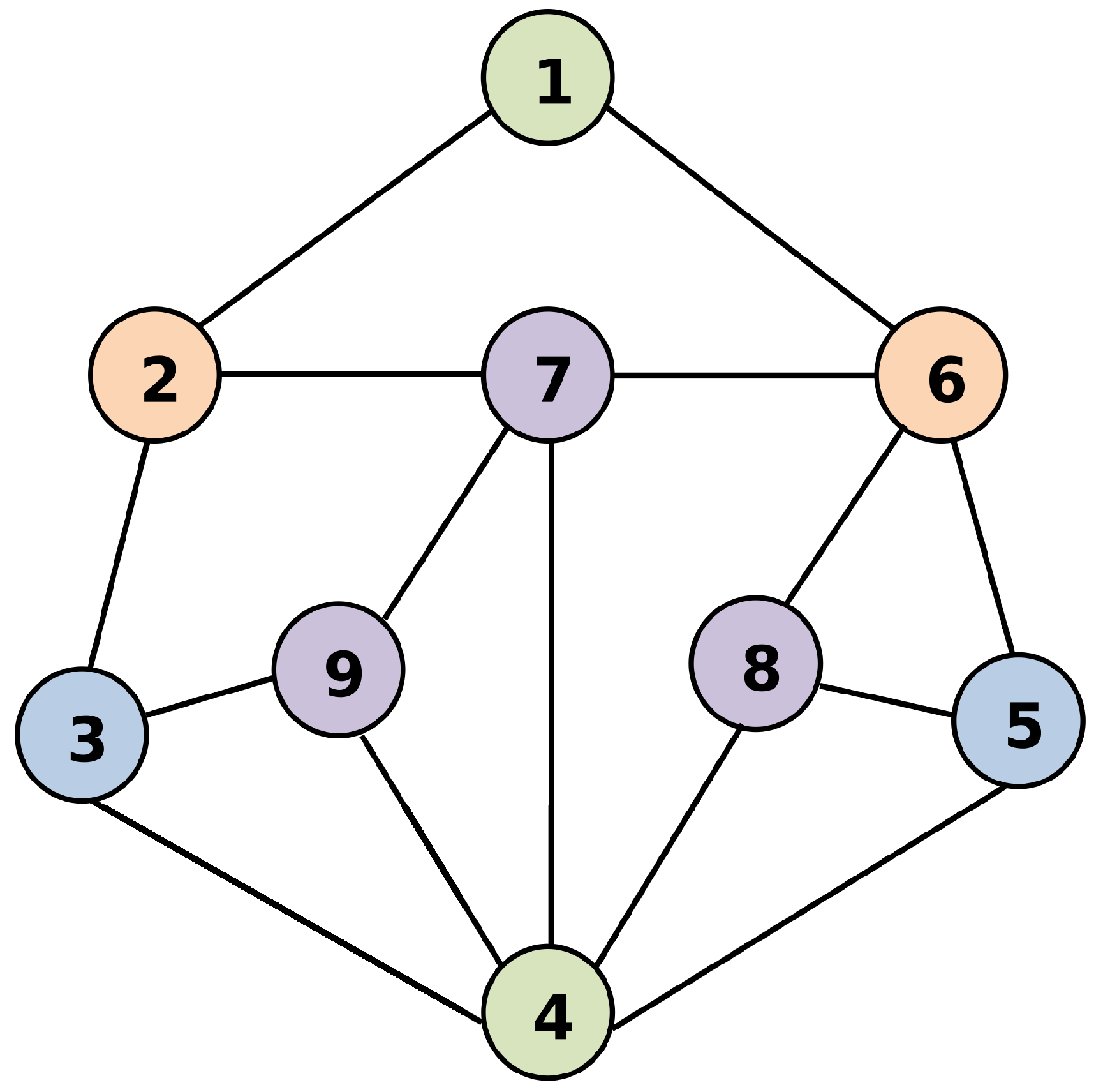
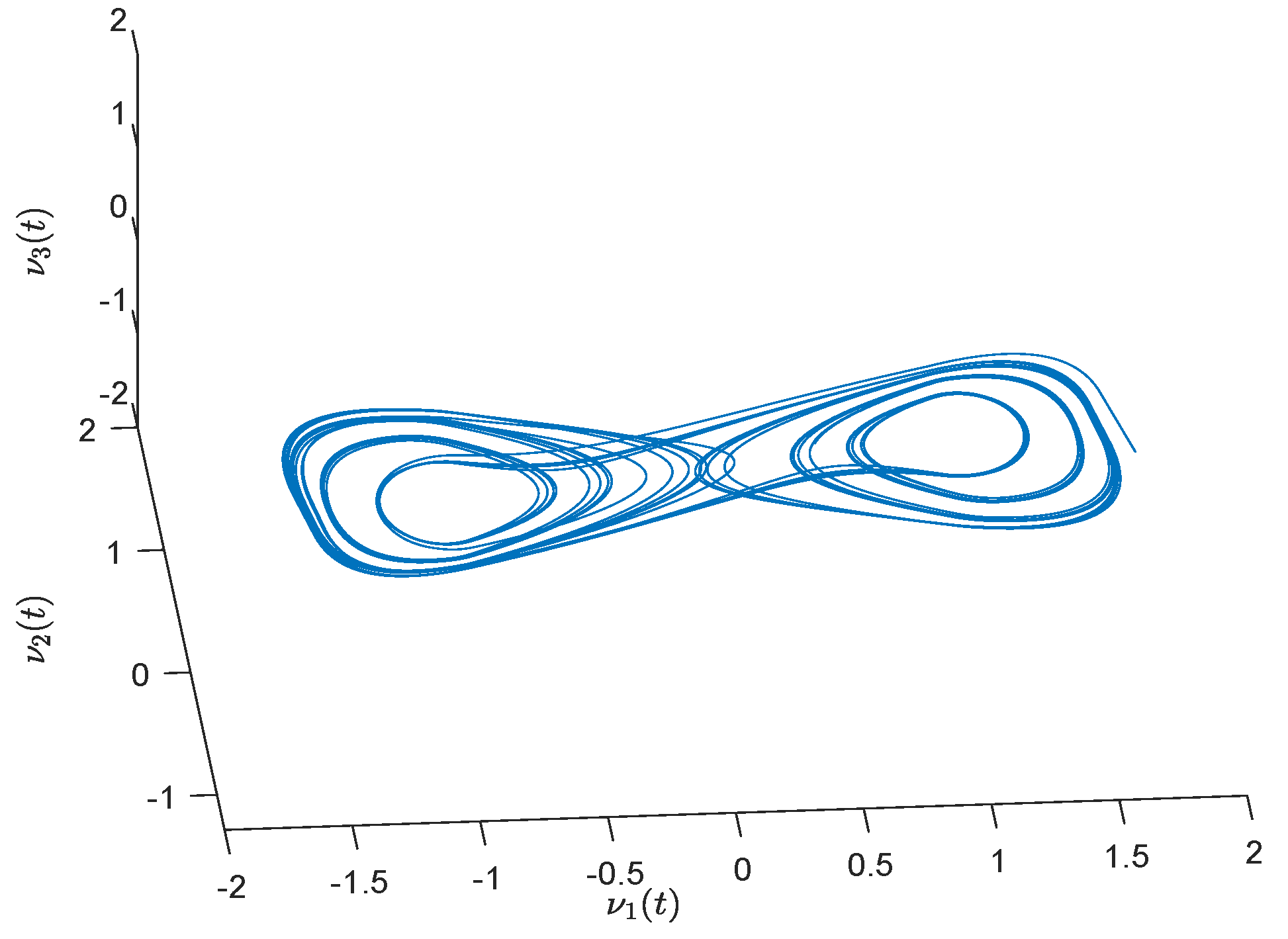
Example 1. The following system is consideredwhere , , , , , . Similarly, by defining , for any , one haswhere , , , . Choose , , , , , ,,,, , , , , and . It can be obtained that system (20) is stable within the time through Lemma 3, and its numerical simulation is shown in Figure 1. However, the origin of system (20) can not be ensured according to Lemma 2, which shows that the stability condition of Lemma 3 proposed in this article is less conservative and more applicable than [36]. Example 2. Consider a class of fuzzy-based impulsive networks composed of 9 nodes, its dynamic model is written aswhere , , , , , , , , , , , , , the impulsive control gains and are arbitrarily taken from , andThe topology of model (21) is expressed in Figure 2. The dynamic behavior of synchronous state is described as
and the dynamical behavior of system (
22) is illustrated by
Figure 3, in which the initial value is chosen as
.
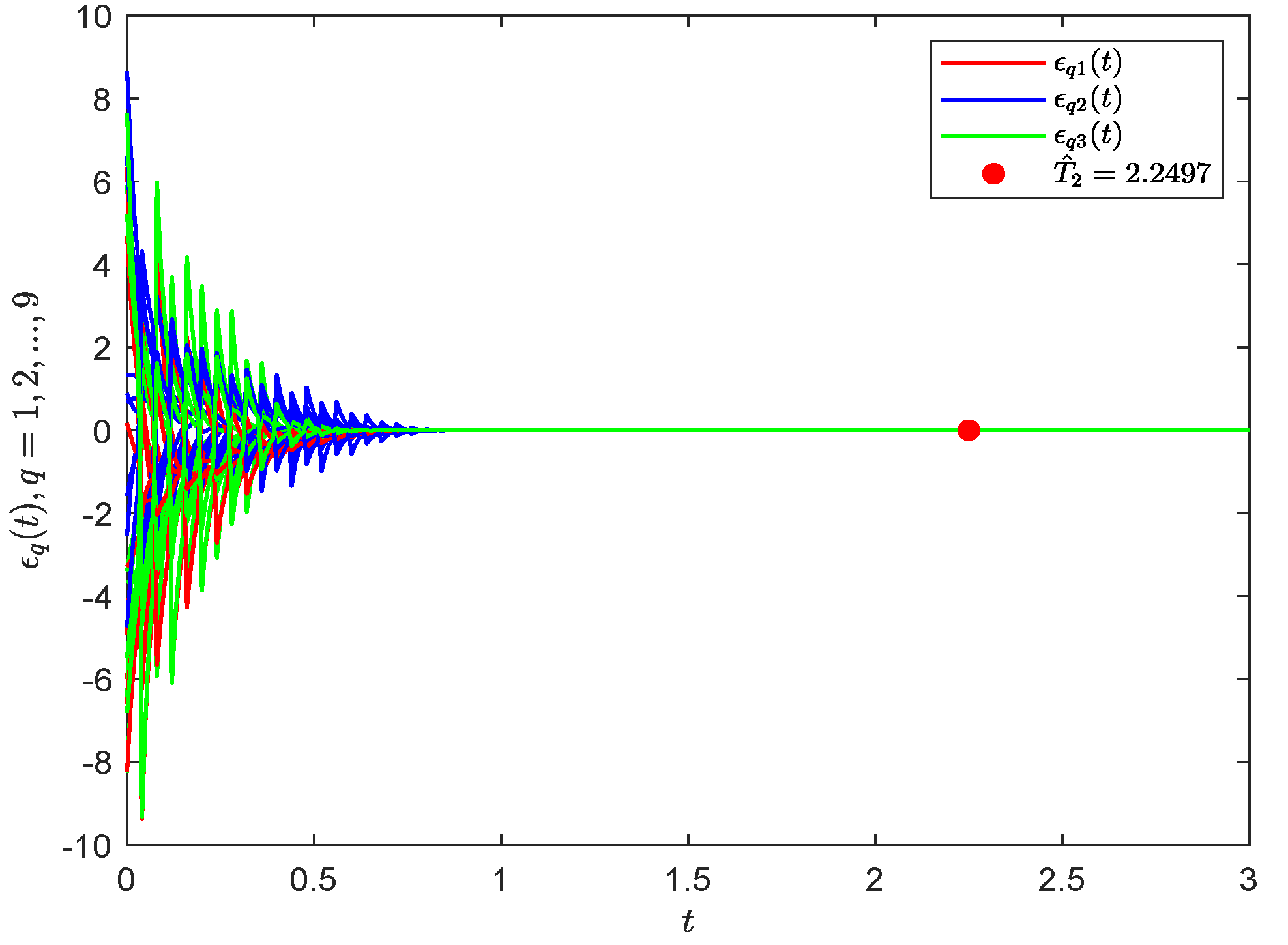
Consider the FT synchronization of system (
21) based on the control strategy (
8). By simple computation,
,
,
. Choose
,
,
,
,
,
,
,
,
, then conditions
and (
9) are satisfied. By Theorem 1, the FT synchronization between system (
21) and system (
22) is ensured within the time
. The corresponding simulation result is revealed in
Figure 4 by picking random initial values. Distinctly, in contrast to the work in [
27] about finite-time synchronization, the proposed FT synchronization control has a better robust performance since they allow the FICNs possess arbitrary initial states.
In addition, since
, Lemma 2 given in [
36] cannot be used to judge that system (21) is fixed-time synchronized, but the fixed-time synchronization is ensured by Lemma 3 proposed in this paper, so Lemma 3 can be applied more flexibly.
5. Conclusions
In this paper, the FT synchronization of impulsive coupling networks based on T-S fuzzy is discussed. Firstly, by proposing a fuzzy control strategy and using Lyapunov method, some conditions of FT synchronization of fuzzy impulsive network are obtained, and the upper bound of synchronization time is estimated. It is worth noting that the controller designed in this paper is in the form of pure power-law, which is simpler and more effective than the traditional design composed of linear part and power-law part. Finally, a numerical example is given to illustrate the feasibility of the proposed control scheme and criteria.
When studying the synchronization of fuzzy-based impulsive coupled networks in this paper, the model considered has the same membership function and fuzzy rules as the designed control strategy. However, if the membership function and fuzzy rules between the model and the control strategy are different, how to design a simple and effective control strategy to study the synchronization control problem of impulsive complex networks remains to be discussed. In addition, it is noted that although fuzzy is considered in the network model and fuzzy control strategies are designed, the synchronization conditions established are independent of fuzziness. Therefore, the discussion to establish synchronization conditions depending on fuzzy rules should be considered in the future research.
Moreover, note that the synchronization can be solved for a fixed-time under the FT control protocol (
8) by adjusting the control parameters. However, the adjustment may be seriously troublesome since the relation between the convergence time and the parameters are not clear. Besides, the faster convergence time may result in larger control costs. Therefore, how to design an effective control strategy to achieve synchronization in the specified-time remains to be further explored.



{kind=link}
{kind=link}
{kind=link}
{kind=link}



