
A Biorthogonal Hermite Cubic Spline Galerkin Method for Solving Fractional Riccati Equation



Abstract
:1. Introduction
2. Preliminaries
2.1. Biorthogonal Hermite Cubic Spline Scaling Bases
2.2. Representation of Fractional Integral Operator in BHCSSb
- If , then according to the support of function , it is easy to show that for .
- If , then we have
- If , then by putting , one can write
- If then for , we get
3. Wavelet Galerkin Method
4. Convergence Analysis
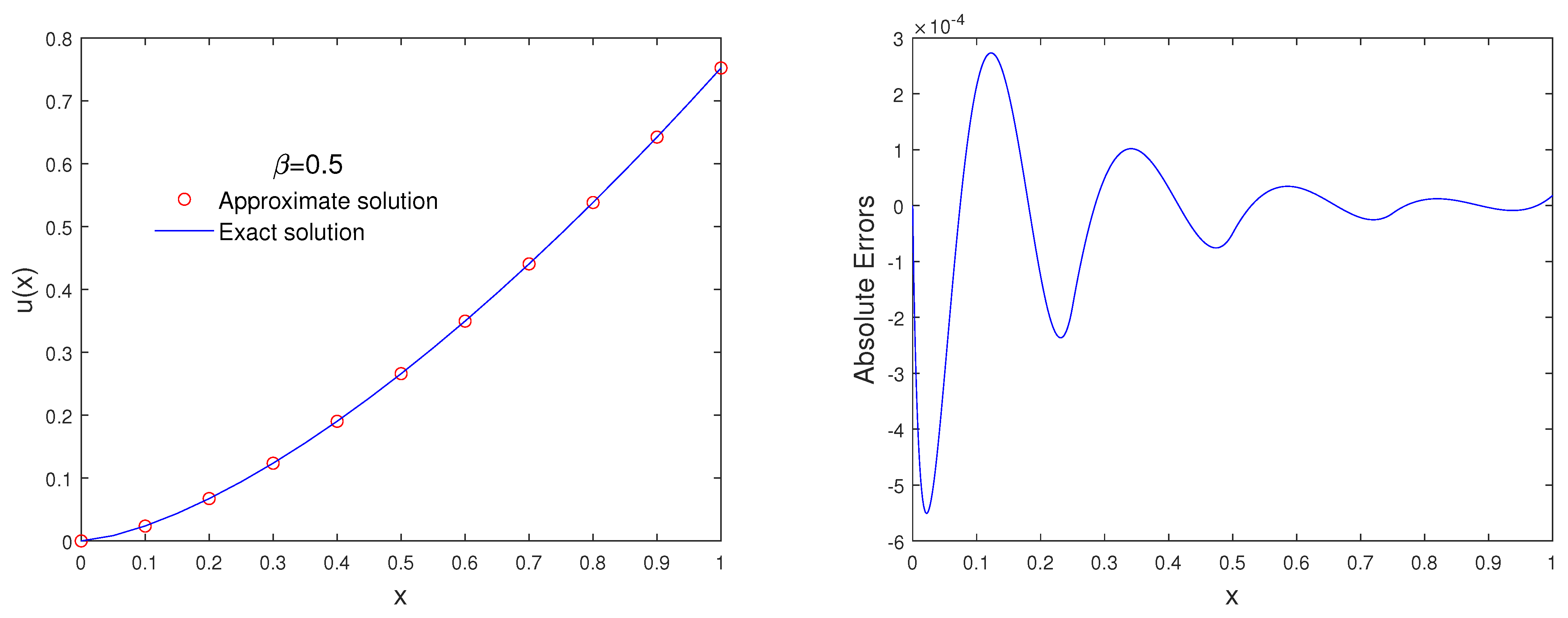
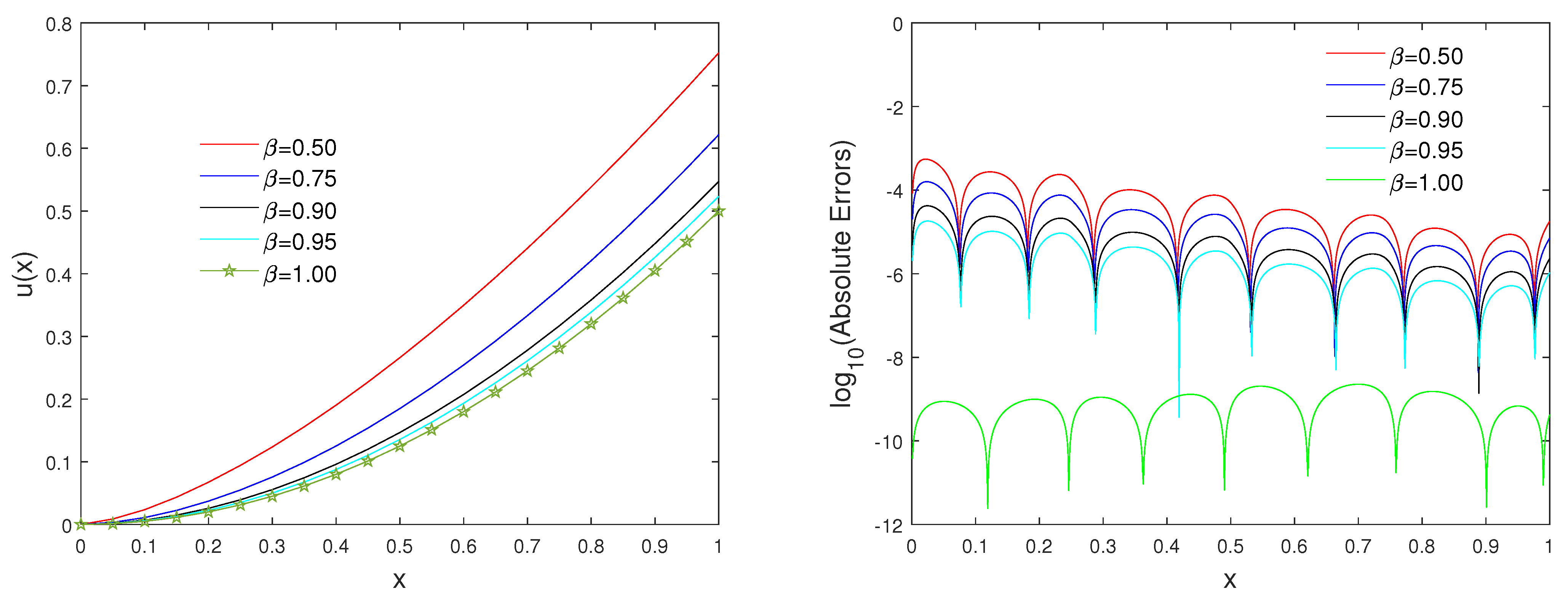
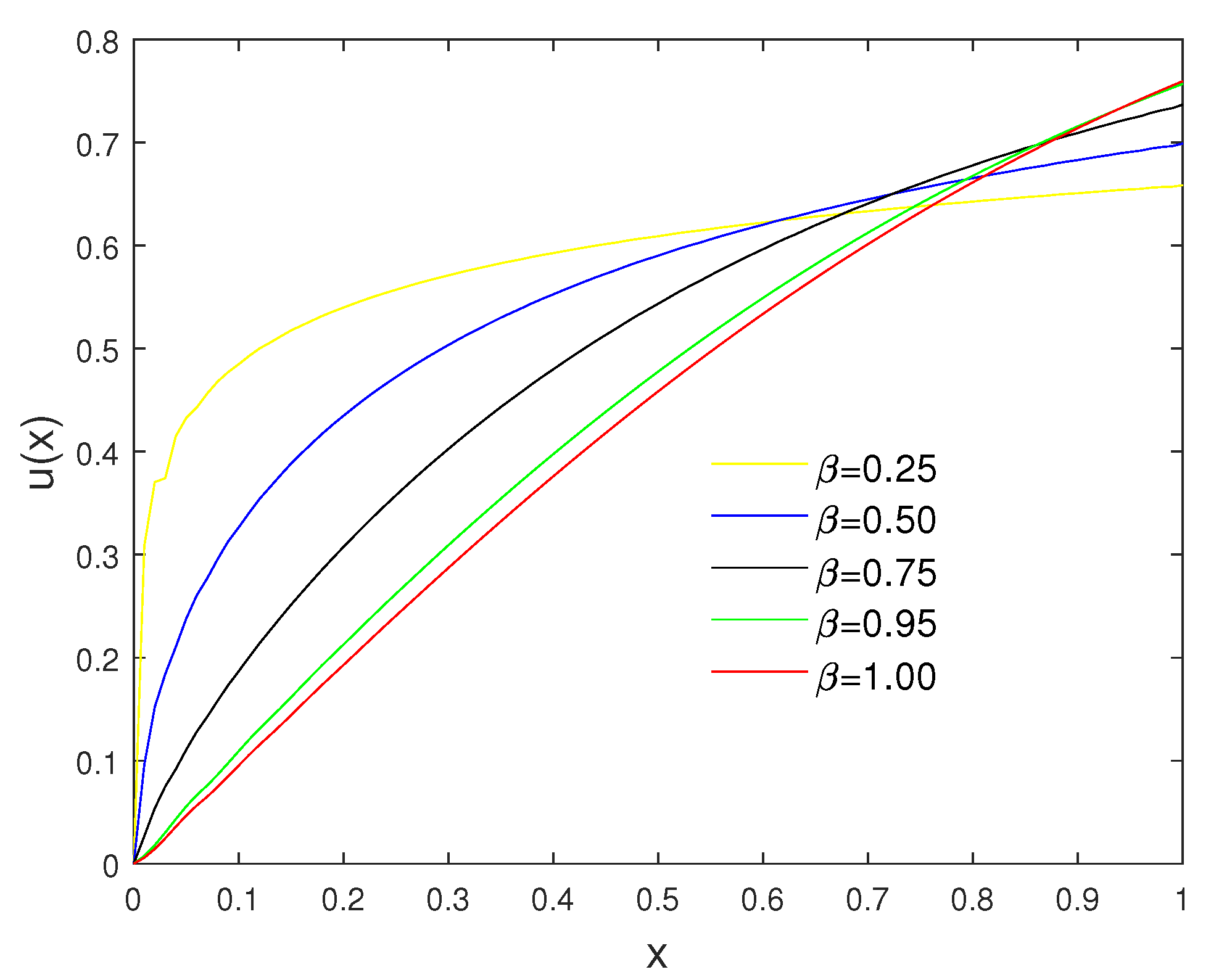
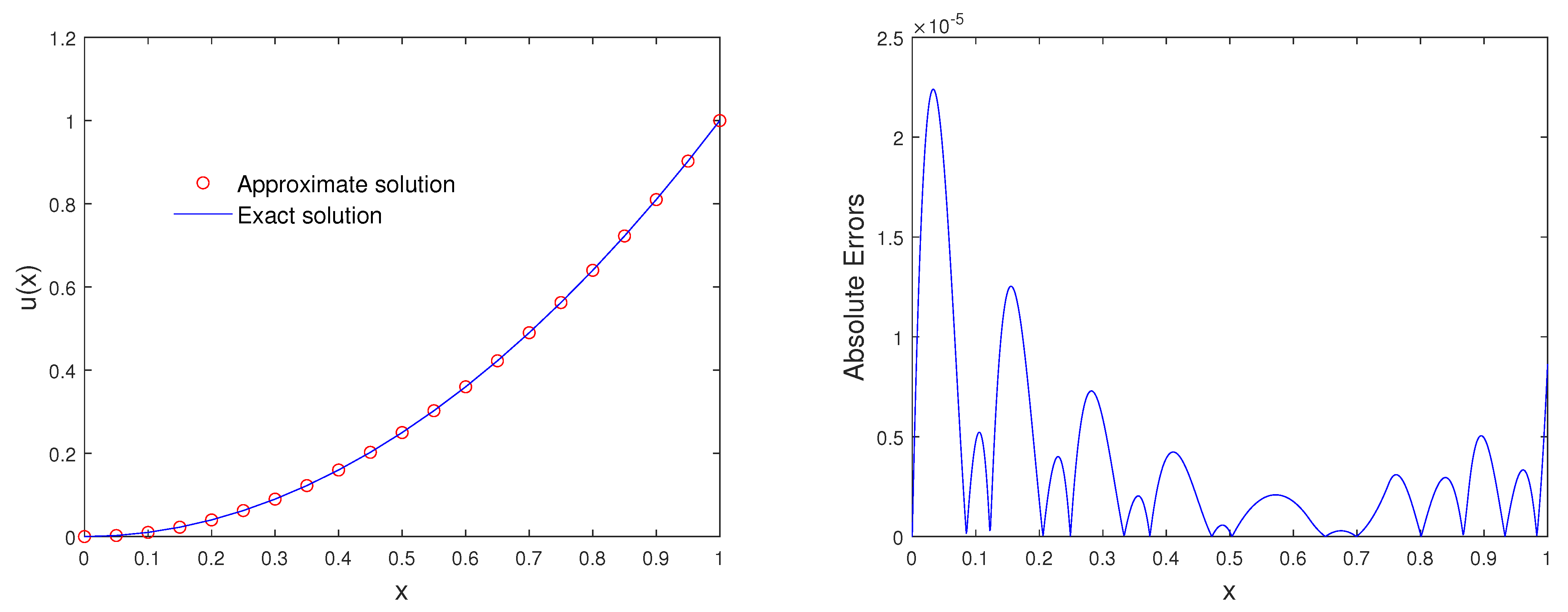
5. Numerical Experiments
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| The real numbers | |
| The positive real number | |
| The natural numbers | |
| The positive integers | |
| C | The space of continuous functions |
| The space of functions which are n times continuously differentiable | |
| The spaces of p-integrable functions | |
| ODE | Ordinary differential equations |
| BHCSSb | Biorthogonal Hermite cubic Spline scaling bases |
References
- Conte, R.; Musette, M. Link between solitary waves and projective Riccati equations. J. Phys. A Math. Gen. 1992, 25, 5609–5623. [Google Scholar] [CrossRef]
- Kravchenko, V. Applied Pseudo Analytic Function Theory, ch. 6 Complex Riccati Equation, 65–72 Frontiers in Mathematics; Brikhauser: Basel, Switzerland, 2009. [Google Scholar] [CrossRef]
- Mainardi, F.; Pagnini, G.; Gorenflo, R. Some aspects of fractional diffusion equations of single and distributed orders. Appl. Math. Comput. 2007, 187, 295–305. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.L.; Chen, G.H. A new operational approach for solving fractional calculus and fractional differential equations numerically. In Proceedings of the Seventh IASTED International Conference on Software Engineering and Applications, Marina del Rey, CA, USA, 3–5 November 2003. [Google Scholar]
- Mohammadi, F.; Cattani, C. A generalized fractional-order Legendre wavelet Tau method for solving fractional differential equations. J. Comput. Appl. Math. 2018, 339, 306–316. [Google Scholar] [CrossRef]
- Rabiei, K.; Razzaghi, M. Fractional-order Boubaker wavelets method for solving fractional Riccati differential equations. Appl. Num. Math. 2021, 168, 221–234. [Google Scholar] [CrossRef]
- Singh, H.; Srivastava, H.M. Jacobi collocation method for the approximate solution of some fractional-order Riccati differential equations with variable coefficients. Phys. A Stat. Mech. Its Appl. 2019, 523, 1130–1149. [Google Scholar] [CrossRef]
- Yuzbasi, S. Numerical solutions of fractional Riccati type differential equations by means of the Bernstein polynomials. Appl. Math. Comput. 2013, 219, 6328–6343. [Google Scholar]
- Raja, M.A.Z.; Manzar, M.A.; Samar, R. An efficient computational intelligence approach for solving fractional order Riccati equations using ANN and SQP. Appl. Math. Model. 2015, 39, 3075–3093. [Google Scholar] [CrossRef]
- Haq, E.U.; Ali, M.; Khan, A.S. On the solution of fractional Riccati differential equations with variation of parameters method. Eng. Appl. Sci. Lett. 2020, 3, 1–9. [Google Scholar]
- Jeng, S.W.; Kilicman, A. Fractional Riccati equation and its applications to Rough Heston model using numerical methods. Symmetry 2020, 12, 959. [Google Scholar] [CrossRef]
- Kashkari, B.S.H.; Syam, M.I. Fractional-order Legendre operational matrix of fractional integration for solving the Riccati equation with fractional order. Appl. Math. Comput. 2016, 290, 281–291. [Google Scholar] [CrossRef]
- Li, X.; Wu, B.; Wang, R. Reproducing kernel method for fractional Riccati differential equations. Abstr. Appl. Anal. 2014, 970967. [Google Scholar] [CrossRef] [Green Version]
- Ashpazzadeh, E.; Lakestani, M. Biorthogonal cubic Hermite spline multiwavelets on the interval for solving the fractional optimal control problems. Comput. Methods Differ. Equ. 2016, 4, 99–115. [Google Scholar]
- Dahmen, W.; Han, B.; Jia, R.Q.; Kunoth, A. Biorthogonal multiwavelets on the interval: Cubic Hermite splines. Constr. Approx. 2000, 16, 221–259. [Google Scholar] [CrossRef] [Green Version]
- Alpert, B.; Beylkin, G.; Coifman, R.R.; Rokhlin, V. Wavelet-like bases for the fast solution of second-kind integral equations. SIAM J. Sci. Stat. Comput. 1993, 14, 159–184. [Google Scholar] [CrossRef]
- Saray, B.N. Abel’s integral operator: Sparse representation based on multiwavelets. BIT Numer. Math. 2021, 61, 587–606. [Google Scholar] [CrossRef]
- Saray, B.N. An effcient algorithm for solving Volterra integro-differential equations based on Alpert’s multi-wavelets Galerkin method. J. Comput. Appl. Math. 2019, 348, 453–465. [Google Scholar] [CrossRef]
- Alpert, B.; Beylkin, G.; Gines, D.; Vozovoi, L. Adaptive solution of partial differential equations in multiwavelet bases. J. Comput. Phys. 2002, 182, 149–190. [Google Scholar] [CrossRef] [Green Version]
- Saray, B.N.; Lakestani, M.; Dehghan, M. On the sparse multiscale representation of 2–D Burgers equations by an efficient algorithm based on multiwavelets. Numer. Meth. Part. Differ. Equ. 2021. [Google Scholar] [CrossRef]
- Hovhannisyan, N.; Müller, S.; Schäfer, R. Adaptive multiresolution discontinuous Galerkin schemes for conservation laws. Math. Comp. 2014, 83, 113–151. [Google Scholar] [CrossRef] [Green Version]
- Asadzadeh, M.; Saray, B.N. On a multiwavelet spectral element method for integral equation of a generalized Cauchy problem. BIT Numer. Math. 2022, 1–34. [Google Scholar] [CrossRef]
- Beylkin, G.; Keiser, J.M. On the Adaptive Numerical Solution of Nonlinear Partial Differential Equations in Wavelet Bases. J. Comput. Phys. 1997, 132, 233–259. [Google Scholar] [CrossRef] [Green Version]
- Dahmen, W.; Kunoth, A.; Schneider, R. Wavelet Least Squares Methods for Boundary Value Problems. SIAM J. Numer. Anal. 2002, 39, 1985–2013. [Google Scholar] [CrossRef]
- Kilbas, A.; Srivastava, H.M.; Trujillo, J.J. Theory and Applications of Fractional Differential Equations, 24; Elsevier, B.V.: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Afarideh, A.; Dastmalchi Saei, F.; Lakestani, M.; Saray, B.N. Pseudospectral method for solving fractional Sturm-Liouville problem using Chebyshev cardinal functions. Phys. Scr. 2021, 96, 125267. [Google Scholar] [CrossRef]
- Mallat, S.G. A Wavelet Tour of Signal Processing; Academic Press: Cambridge, MA, USA, 1999. [Google Scholar]
- Saad, Y.; Schultz, M.H. GMRES: A generalized minimal residual method for solving nonsymmetric linear 165 systems. SIAM J. Sci. Stat. Comput. 1986, 7, 856–869. [Google Scholar] [CrossRef] [Green Version]
- Rahimkhani, P.; Ordokhani, Y.; Babolian, E. Fractional-order Bernoulli wavelets and their applications. Appl. Math. Model. 2016, 40, 8087–8107. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Method | Bernoulli Wavelets Method [29] | ||
|---|---|---|---|
| -error |
| fractional-order Legendre wavelet method | ||||
| proposed method |
| Absolute Errors |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bin Jebreen, H.; Dassios, I. A Biorthogonal Hermite Cubic Spline Galerkin Method for Solving Fractional Riccati Equation. Mathematics 2022, 10, 1461. https://doi.org/10.3390/math10091461
Bin Jebreen H, Dassios I. A Biorthogonal Hermite Cubic Spline Galerkin Method for Solving Fractional Riccati Equation. Mathematics. 2022; 10(9):1461. https://doi.org/10.3390/math10091461
Chicago/Turabian StyleBin Jebreen, Haifa, and Ioannis Dassios. 2022. "A Biorthogonal Hermite Cubic Spline Galerkin Method for Solving Fractional Riccati Equation" Mathematics 10, no. 9: 1461. https://doi.org/10.3390/math10091461