1. Introduction
In this work, thermosyphon refers to a family of devices formed by a vertical closed-loop pipe where an incompressible fluid circulates thanks to the differences of the temperature from one side of the loop to the other. The flow inside the loop is generated by gravity and thermal conduction. Then, natural convective movements occur.
There is a vast literature concerning different thermosyphon models; for instance, see [
1,
2,
3,
4,
5,
6] and the references therein. After the pioneering works of Keller and Hurle (see [
7,
8], respectively), many authors have paid attention to these kinds of models due to their applications to many industrial fields such as refrigeration and air conditioning, electronic cooling, nuclear reactors, geothermal heat extraction, etc. We refer to the recent works [
9,
10,
11] for some particular applications.
The thermosyphon model allows us to observe many involved behaviors in a physically simple system. In fact, the problem of convection in a closed-loop thermosyphon has important implications for the performance of other heating or cooling systems; see, for instance [
12,
13,
14], where the boundary layer problem and the impact of the flow of nanoparticles in nanofluids were studied.
In this work, we were interested in analyzing the thermosyphon model for large values of the Reynold’s number where a binary fluid is considered, that is we considered a solute in a fluid, such as water and antifreeze. In this case, we studied also the solute concentration together with the velocity and the temperature of the fluid. We would like to refer to [
15,
16], where a rigorous analysis of the motion of a one-component fluid was performed for large values of the Reynold’s number. It was shown in [
15] that, as
, the stationary solutions could be classified into two different classes: “fast solutions” for which the velocity of the fluid is independent of
as
and “slow solutions” for which the velocity of the fluid at equilibrium depends on the Reynold’s number as
.
Therefore, we focused on analyzing, for the first time in the literature, fast solutions for binary fluids, generalizing in some sense the results obtained in [
15,
16]. This is the main goal of the present work. We considered the distribution equation of the solute of the loop as in [
8], which is generated by Soret diffusion and reduced by molecular diffusion. Notice that the Soret effect has a significant impact in the thermosyphon model [
1,
4]. In fact, inside a thermosyphon, because of the temperature gradients, the Soret effect induces the solute concentration gradients significantly, thus initiating a natural convection inside the loop.
In these thermosyphon models, it can be assumed that the cross-sectional area of the device is constant and smaller than the dimensions of the physical device. Then, the circuit can be reduced to a closed curve in the space. Therefore, the position in the circuit is determined by a uni-dimensional variable
, which is the arc length of the previously mentioned curve. Moreover, as is common in the literature, the velocity of the fluid is assumed to be a scalar quantity depending only on time,
, instead of the temperature and solute concentration, which depend on time, as well as on the position of the loop
and
, respectively; see [
1,
3,
7,
8,
17].
Our main contributions in this paper are as follows:
2. Notations and Previous Results
We considered a Newtonian binary fluid (with solute), and we prove some result about the solutions of (
1), which are a generalization of some results ([
16]) where the authors considered a Newtonian fluid with only one component (without a solute).
The evolution of the velocity, temperature, and solute concentration is given by the following coupled ODE/PDE system when a binary Newtonian fluid and the Soret effect are considered [
1,
2,
7,
8,
17,
18,
19,
20]; see [
4] for details.
The parameter is a positive scalar. is the arc length. denotes integration along the closed path of the circuit. The function represents the variation in height along the circuit, so f describes the geometry of the loop and the distribution of gravitational forces. Note that . The function represents the heat transfer law across the loop wall and is Newton’s linear cooling law, where is the (given) ambient temperature distribution.
The function
G specifies the friction law at the inner wall of the loop. It is usually taken to be a positive constant for the linear friction case or
for the quadratic law [
15,
16] or even a rather general function given by
, where
is a Reynold’s-like number, that is assumed to be large, and
g is a smooth strictly positive function defined on
such that
as
where
A is a positive constant and
as
[
15]. Note that if we formally set
in the function
G above, we recover the quadratic law
, as in this work.
The functions and H incorporate relevant physical constants of the model, such as the cross-sectional area, D, the length of the loop, L, de Prandtl’s, Rayleigh’s, or Reynold’s numbers, etc.
Finally,
where
is an asymptotic value for the viscous drag force of the fluid at the wall for large Reynold’s numbers [
15]. Note that all functions that depend on the position
x,
must be one-periodic functions of
x.
The results about the well-posedness and the existence of the global attractor and the inertial manifold for the solutions of System (
1) were given in [
4,
5,
21] (see Proposition A1 in the
Appendix A).
Assume that
are given by the following Fourier series expansions:
with the initial data
given by
and
given by
Observe that since all functions involved are real, one has
, and
.
It is important to note that we considered all functions with a zero average. Namely, integrating the third equation of (
1) with respect to
x, since
T and
S are periodic functions, we have:
this is
and
is constant with respect to
t, i.e.,
From this, we note that the semigroup defined by (
1) in
is not a global attractor in this space. However, integrating with respect to
x, the second equation of (
1), and taking into account again the periodicity of
T, we have that
. Therefore, if we consider now
and
, then from the second and third equation of system (
1), we obtain
and
and verify the same equations with
,
, and
. Finally, since
, in the equations for
v, we have
. Thus,
verifies System (
1) with
, and the dynamics is essentially independent of
. Therefore, in this work, we considered all functions depending on
x to have a zero average in order to prove the existence of the global attractor in the phase space
.
Moreover, we would like to point out that the dynamics of the full system (
1) are given by the reduced subsystem for the relevant modes
, where
(ambient temperature) and
f (the function associated with the geometry of the loop) are given by the following Fourier expansions:
with
and
.
This important result about the asymptotic behavior was proven in [
4,
5,
21] with
satisfying the hypotheses of Proposition A1 in the
Appendix A. First, we prove that the asymptotic behavior is given by the coefficients of the set
K (associated with
) thanks to the inertial manifold of this system, and after, we can consider a reduced subsystem using the set
J (associated with
f).
The key of this result is in the expression of the right-hand side of the first equation of the velocity in the system (
1), that is:
Thus, we have reduced the asymptotic behavior of the initial system (
1) to the dynamics of the reduced explicit system (
6). It is worth noting that, from the above analysis, it is possible to design the geometry of the circuit and/or the external heating source, by properly choosing the functions
f and/or the ambient temperature,
, so that the resulting system has an arbitrary number of equations depending on the cardinal of the set
.
Therefore, if the set
to be finite, we obtain the finite dynamical system, which describe the dynamics of the system (
1).
Note that K and J may be infinite sets, but their intersection is finite. For instance, for a circular circuit, we have , i.e., , and then, is either or the empty set.
3. Asymptotic Behavior for Large Reynold’s Numbers
In order to study the asymptotic behavior of solutions of System (
1) for large Reynold’s numbers, we considered the function
and the friction function
, which is exactly the model considered in [
15,
16] for fluids with only one component. We proceeded in three steps:
First, in
Section 3.1, we prove that the velocity is bounded for every function
satisfying the hypothesis of Proposition A1; see Proposition 1. We also obtain that this bounded is independent of
G when we consider the particular case
; see Proposition 2;
Next, in
Section 3.2, we study the asymptotic behavior for the velocity when we consider the case
, as in [
15,
16] for the model with only one component. We generalize in some sense several results for a binary fluid;
Finally, in
Section 3.3, we consider the particular case for the function
, and
in order to study the existence of the fast solutions.
3.1. Estimates of the Velocity for and
In the next section, we recall some asymptotic bounds on the temperature and the solute concentration, as time goes to
∞, in terms of bounds on the functions
and
, respectively. As in previous works, in order to translate these estimates to the velocity, we made use of the version of L’Hôpital’s lemma (see Corollary A1 in the
Appendix A).
We assumed that satisfies the hypothesis of Proposition A1.
Proposition 1. For every solution of (6), we have:and:with . Proof. First, from (
6), we obtain:
Now, taking into account that
from (
9), we have:
and we obtain
. Moreover, using this together with (
10) and working as before, we obtain that
.
Next, reading the equation for
v as:
we have:
and denoting by
and using L’Hôpital’s lemma, that is
we obtain:
Finally, taking into account that:
we obtain:
and we conclude. □
Note that the previous bound on the velocity (as in previous works) is not well suited for the case in which since in this case, the lower bound on G (and therefore, the upper bound on v) may depend on , for example in the particular case for which . To cover this case, we have the following result.
Proposition 2. For any solutions of (6) and , we have: In particular, if , then:where , that is the bound of the velocity is independent of , depending only on the function g. Proof. First, we multiply the equation for the velocity by
, and we have:
Therefore,
and using again L’Hôpital’s lemma together with
, we obtain:
Finally, if , then , and we conclude. □
3.2. Estimates of the Velocity Depending on , for and
In this section, we consider , and we study the asymptotic behavior when the time goes to ∞, for the dynamical system. We prove that the solutions when is small behave the same as the stationary one.
First, we note that the equilibria points with nonzero velocity are given by:
Proposition 3. We considered the general friction case, i.e., and such that , and we assumed that is a finite set. Then, we obtain:
- (i)
- (ii)
- (iii)
If or , then: - (iv)
If and , then:and:which is positive for sufficiently small ϵ and, in this case, for large enough t; - (v)
If G is not constant, let be a solution of:and assume is monotonically increasing in an interval containing .
If reaches such an interval for sufficiently large t and ϵ is sufficiently small, then it remains in this interval and: In particular, if is increasing everywhere, then is unique, and the above holds for any solutions of the system.
Proof. (i) We note that:
with:
Let now
, that is:
and using now that
, we have that:
Thus, using again L’Hôpital’s lemma, we obtain:
since:
with:
and we conclude (i);
(ii) Next, we note that:
with:
Then, we have that:
since, using again L’Hôpital’s lemma, we obtain:
and
; we conclude (ii);
(iii)–(iv) Reading the equations for
v as:
with:
and
, we have that:
and denoting by
and taking into account again that:
we obtain that:
If
or
, then:
and if
and
, then:
and:
Finally, from (
18) using the above parts (i) and (ii), we have that:
with
, and we conclude (iii) and (iv).
(v) From (
20), for any
, there exists
such that for every
:
with
and
.
On the other hand, we find that for
, while the solution remains in the interval where
is increasing, we obtain that the function
satisfies:
where
satisfies that
, and then, after multiplying by
, we obtain:
where
is a lower bound on the derivative of
on the interval. Moreover, if
is sufficiently small, from the properties of the solution of the differential inequality
, we find the invariance property of the interval, and we conclude that:
□
Moreover, from Proposition 3, we obtain directly the following corollaries.
Corollary 1. If and for some solution of (1), we have , then:that is and . On the other hand, if , then no solution satisfies .
Therefore, if
with
or
is increasing everywhere, then the attractor of System (
6) is reduced to a point. Moreover, if
is small, we have:
Corollary 2. Any stationary solutions of System (6) satisfy:and: In particular, as , all equilibria collapse to the set points where range over the solution set of the equations: Furthermore, if or is increasing everywhere, then the attractor of System (6) collapses respectively to the point or the point , where is the unique solution of . Remark 1. Recall that functions associated with the circuit geometry, and to a prescribed ambient temperature, , are given by and respectively.
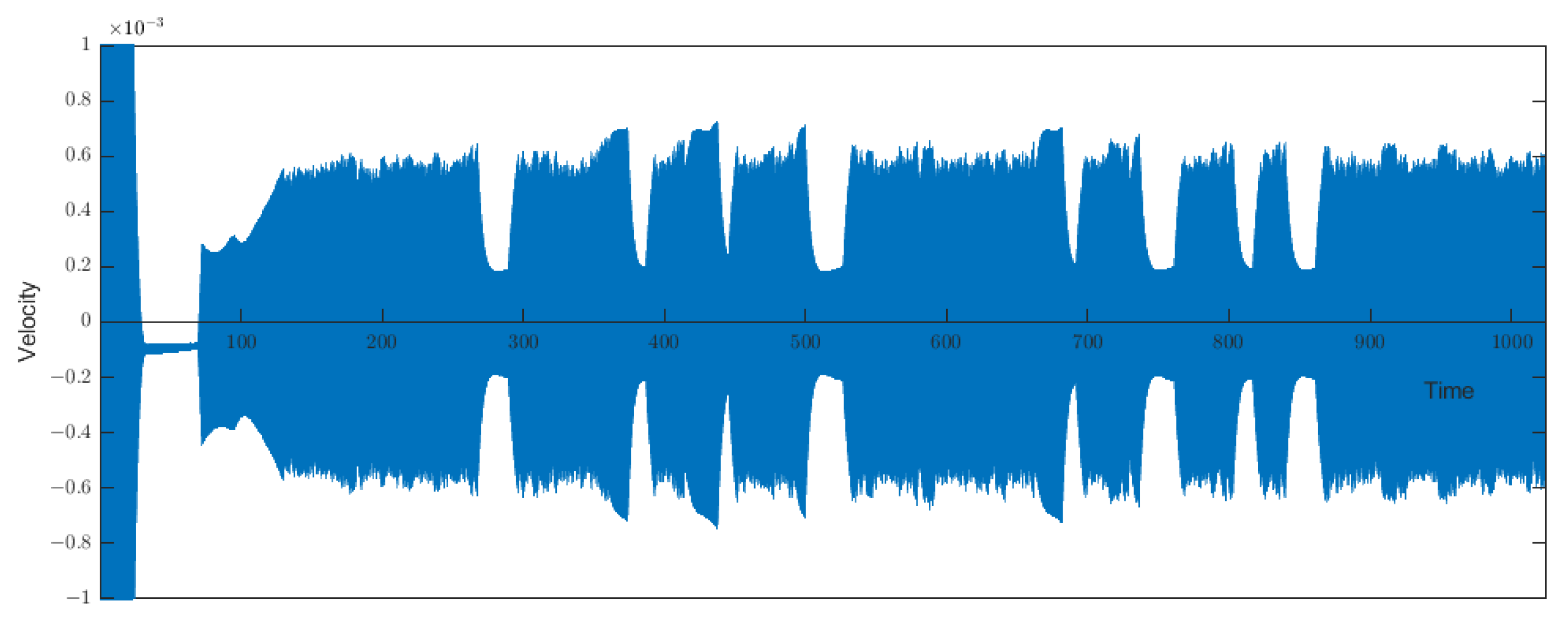
In previous work as [4], using the operator abstract theory, it was proven that if then the global attractor for system Equation (1) in is reduced to a point. In this sense, Corollaries 1 and 2 offer the possibility to obtain the same asymptotic behavior for the dynamics with small ϵ, i.e., the attractor is also reduced to a point taking functions f and without this condition, that is with but on the finite set this function f and satisfy the orthogonality conditions, i.e., Next, we also note if the function is constant in this case for every f geometry of the loop, we have the set that is, the global attractor for System Equation (1) in is reduced to a point. Finally, we note that Proposition 3 implies that when ϵ is sufficiently small and , although there may be small oscillations of the velocity around some fixed value, the sign of the velocity is determined by that of , and therefore, the fluid motion inside the circuit is always clockwise or always counterclockwise. As in viscoelastic fluids, even with a constant G (see [22]), when we have the orthogonality condition , the velocity oscillates around zero, changing sign an infinite number of times, producing complex behavior in the physical device (see Figure 1). 3.3. Fast Solutions in the Case of and
Hereafter, we consider
and the friction function
in order to study the asymptotic behavior of solutions of System (
1) for large Reynold’s numbers. Hereafter, we consider
and the friction function
in order to study the asymptotic behavior of solutions of System (
1) for large Reynold’s numbers.
From the properties of
g, it turns out that for nonzero
v,
if the Reynold’s number is large, but if
is sufficiently small, then
Therefore, we cannot expect that the formal limit obtained by setting
in (
6) (and then
for all
will describe in a faithful manner the dynamics of the system for large
.
However, we show in this section that it is possible to prove some results about the asymptotic behavior of solutions that retain the velocity bounded away from zero.
First, we considered the stationary solutions with nonzero velocity for large Reynold’s numbers. According to Velázquez (1994), taking
in (
11), we obtain the class of stationary solutions denoted by fast stationary solutions.
Note that the set of equilibria with nonzero velocity,
fast stationary solutions, with
, i.e., with
, are given by:
plus the compatibility conditions
, where ± denotes the sign of
.
In these cases, if , then is the positive fast stationary solution, and if , then is the negative fast stationary solution.
Now, we study the existence of fast time-dependent solutions, that is the solutions depending on time, such that the velocity does not go to zero when the time goes to ∞, for large Reynold’s numbers.
Now, we assumed that
with
as in the above section, and we considered the solutions of System (
6) such that
is bounded away from zero as
, i.e., the sign of
is fixed for t large enough. This kind of solutions is called a positive fast time solution if
or a negative fast time solution if
for t and
large enough.
We show below that the fast stationary solutions such that attract the dynamics of fast time-dependent solutions.
Proposition 4. We assumed there exists a solution of (6) such that is bounded away from zero for , and thus, the sign of is constant for large enough t.Then, for every k we have: - (i)
- (ii)
with given by (21), and we also have:Moreover, we have that: - (iii)
with and given by (21) and (22), respectively, as well as with .
Proof. (i) We note that:
with:
Changing variables
, we obtain:
Let now
; from (
28), we have:
Using now that
, we have that:
Next, using again L’Hôpital’s lemma, we obtain:
since:
Thus, we obtain:
and we conclude (i);
(ii) Next, we note that:
and if we denote by:
then working as before and applying L’Hôpital’s lemma, we have that:
since:
Moreover, we also obtain:
with
, that is:
and we conclude (ii).
Finally, we note that:
and:
with:
and proceeding as before and applying L’Hôpital’s lemma, we obtain:
with
; we conclude. □
Note that, from the above subsection that we can take small enough such that , and then, as . Now, we considered as (an assumption that was made in Velázquez, 1994), and then, with and , we obtain
Now, we can prove the following corollary, which precisely states that the dynamics of fast time-dependent solutions is attracted towards fast stationary solutions.
Corollary 3. Under the above notations and hypotheses, we can prove that as , there exists a positive fast time-dependent solution such that if with , then:where is the solution of and are positive constants independent of . On the other hand, is , so no fast time-dependent solutions exist. The same holds for negative fast time-dependent solutions by changing + to −.
Proof. From Proposition 4, we can take
small enough such that
for
t large enough, and we have that:
Now, let
and
, so there exits a positive constant
F independent of
, such that:
with
Next, we considered the equations for the velocity
:
and taking into account that
as
, given
, there exists
such that
, and we note that the stationary velocity
satisfies that:
That is
Furthermore, it is important to note that
satisfies that
since if
, then
. Then, read the equations for
v as:
with
that is
for large enough
t. If we multiply by
and use the function
, which monotonically increasing, working as the above section, from Gronwall’s lemma, we obtain
as
.
Finally, using this together with (
27), we also obtain
as
, and we conclude. □
Remark 2. Note that for a thermosyphon model where the fluid has only one component (see [15]), the condition implies the existence of a unique positive fast stationary solution, which is moreover stable. Therefore, fast time-dependent solutions must exist in its basin of attraction. The corollary above states then that all positive fast time-dependent solutions must be close enough to the stationary one. The same remark applies for negative fast solutions.
On the other hand, the corollary contains a criterion for the nonexistence of fast time-dependent solutions. Furthermore, note that the velocity for all other solutions must change sign an infinite number of times.
4. Numerical Results
In this section, we analyze several numerical experiments in order to illustrate the theoretical results. In particular, these experiments show the asymptotic behavior of the dynamics of fast time-dependent solutions for large Reynold’s numbers.
We solved the system of ordinary differential equations (
6) using the solvers of MATLAB for stiffness equations. Our experiments were performed using ODE15s with a local error tolerance of
except for the first one (see
Figure 1), where we considered a local error tolerance of
. Moreover, except the case where
, we could obtain very similar results using the ODE45 solver. The simulations were performed in double precision with machine epsilon
.
We plot some interesting situations that reflect in a good way the previous results. As the system is multidimensional, we present the results in temporal graphs (a given variable versus time) and phase space graphs (two physical variables plotted against each other).
Throughout this section, we consider the friction law represented by G of the form . Note that if goes to infinity.
Note that we deal with the positive fast stationary solutions. Since we considered a circular geometry, we have
and
. Then, we took
and omitted the equation for
, the conjugate of
k. Therefore, from (
21)–(
23), we have the following system of equations:
where the unknowns are
, the Fourier mode of the temperature,
, the Fourier mode of the solute concentration, and
, the velocity of the fluid.
In order to reduce the number of free parameters, we made a change to variables
y
, and we denote the real and imaginary part of
by
For the Soret effect diffusion coefficients
b and
c, we assumed the values calculated by Hart in [
1], which consider a thermosyphon of circular geometry of radius
(for the loop) and
(for the pipe). Hart took the values for a mixture of alcohol and water, borrowed from Hurle and Jakeman [
7]. This reference settles down that
is the number of Lewis, where
is the diffusivity of the solute that has a value for such a mixture of
cm
s
and
V is the scale of the velocity, with a value of
cms
for a circular thermosyphon whose loop-to-pipe-radius ratio is 10. Therefore, we took
. Moreover, as Hart indicated in [
1],
b (Soret diffusion coefficient) is a parameter that determines the qualitative behavior of the variable. Finally,
A and
B refer in this model to the position-dependent
heat flux inside the loop.
Then, since we want to guarantee that:
we took
and
. In fact, taking
and
, we obtained a velocity oscillating close to zero. Therefore, according to Proposition 3, we cannot guarantee that the velocity keeps the same sign; see
Figure 1. This example reflects very well how, even for a small epsilon, there may be solutions for which the velocity changes sign an infinite number of times and whose dynamics may be very involved. This produces complex behavior in the physical device.
First of all, we kept fixed
, and we varied the Reynold’s number in order to analyze the asymptotic behavior of the solutions of (
6). For this particular case, the fast stationary solution is given by:
The numerical experiments were carried out for
to
, and we took as initial values the following ones:
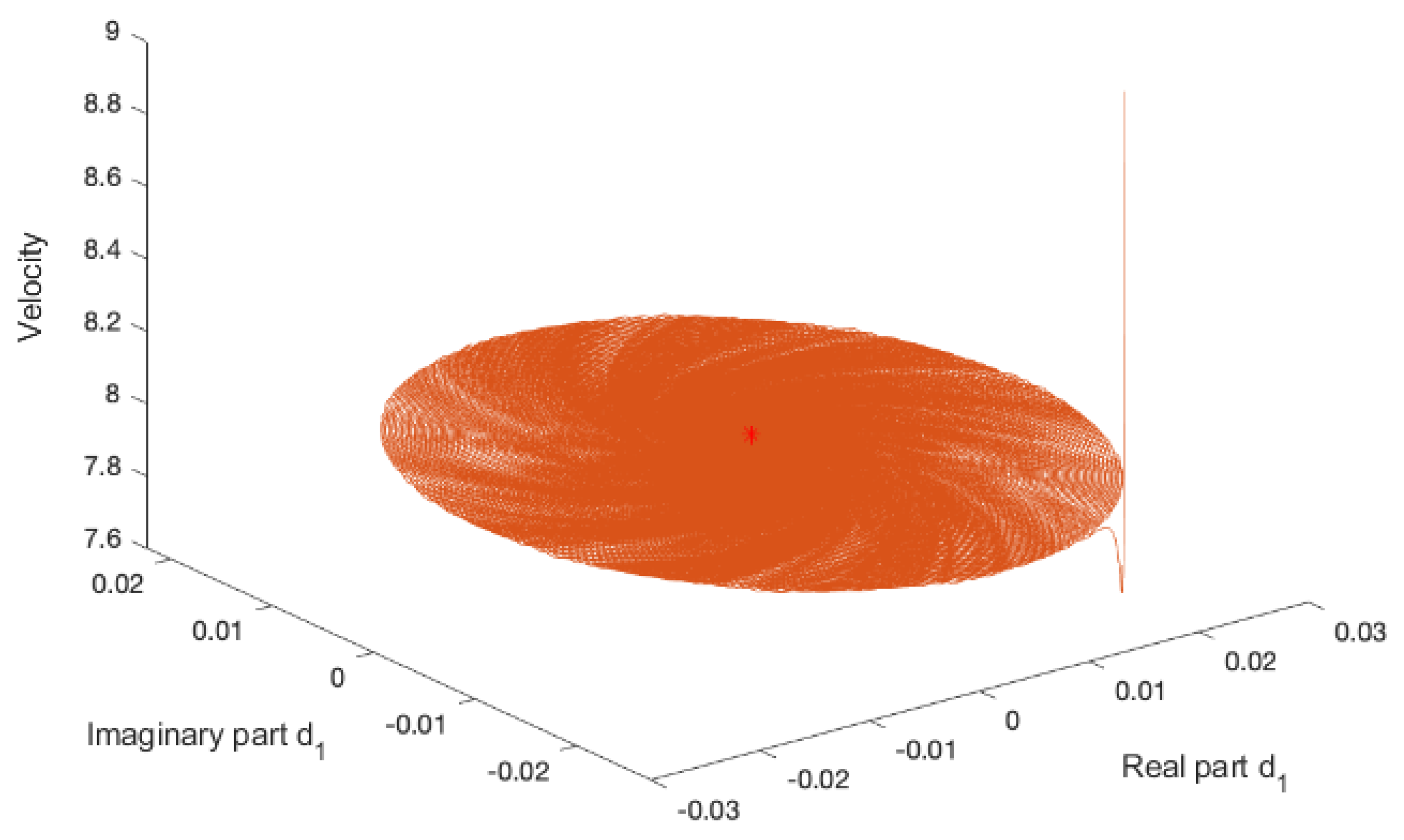
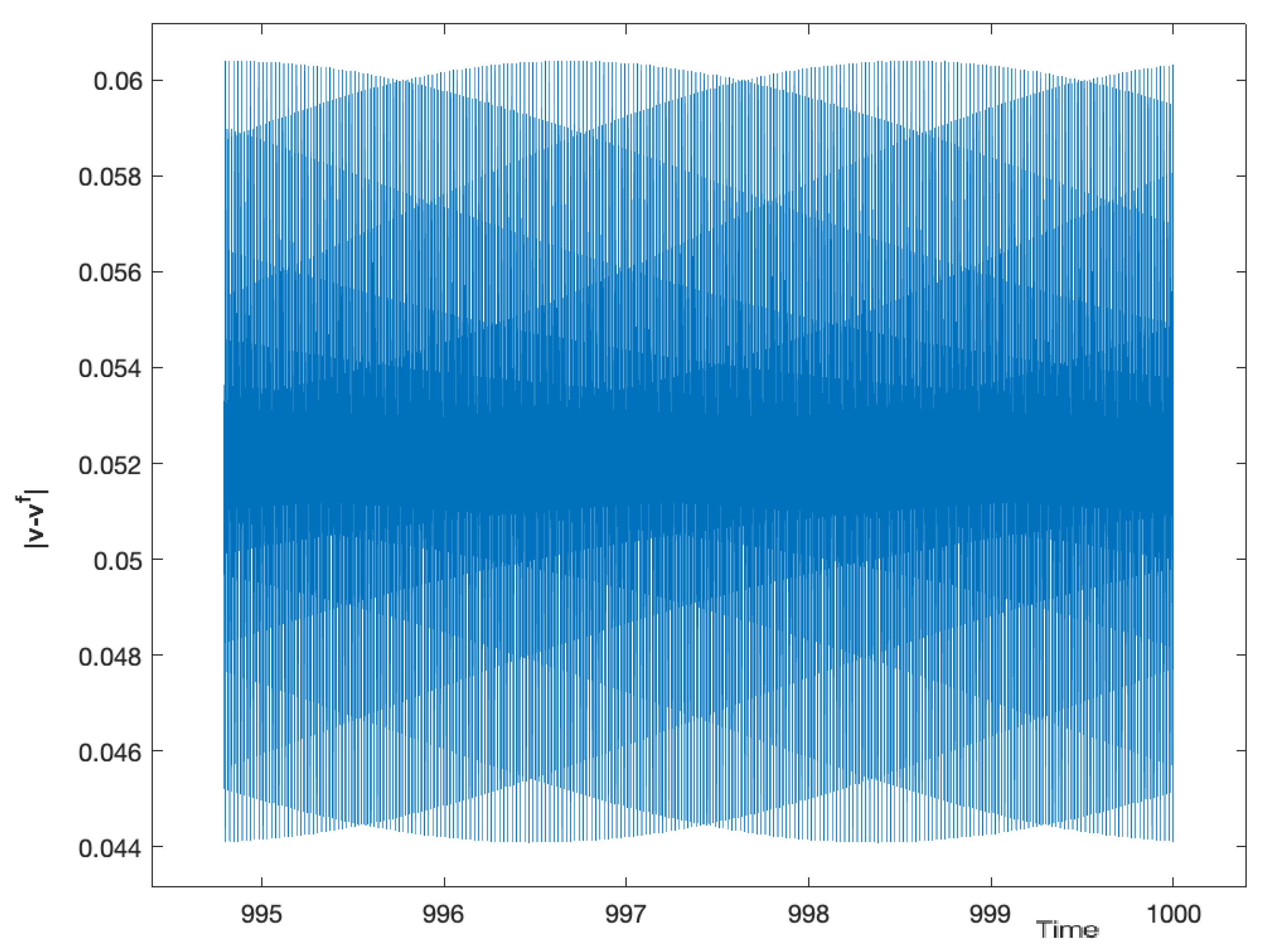
We show that the dynamics of fast time-dependent solutions are attracted towards fast stationary solutions. After some more or less complicated transitions, fast time-dependent solutions are close to the stationary one; see
Figure 2,
Figure 3 and
Figure 4 Note that although there are small oscillations of the velocity, it maintains a constant sign for a large time, and therefore, the fluid undergoes a sustained motion.
Moreover, we observed that if
is increasing, then the fast time-dependent solutions are closer to the fast stationary solution considering the same time; see
Figure 5 and
Figure 6.
Note that the numerical results were in good agreement with the estimates obtained in Corollary 3. For instance, if from the numerical results, we obtain .
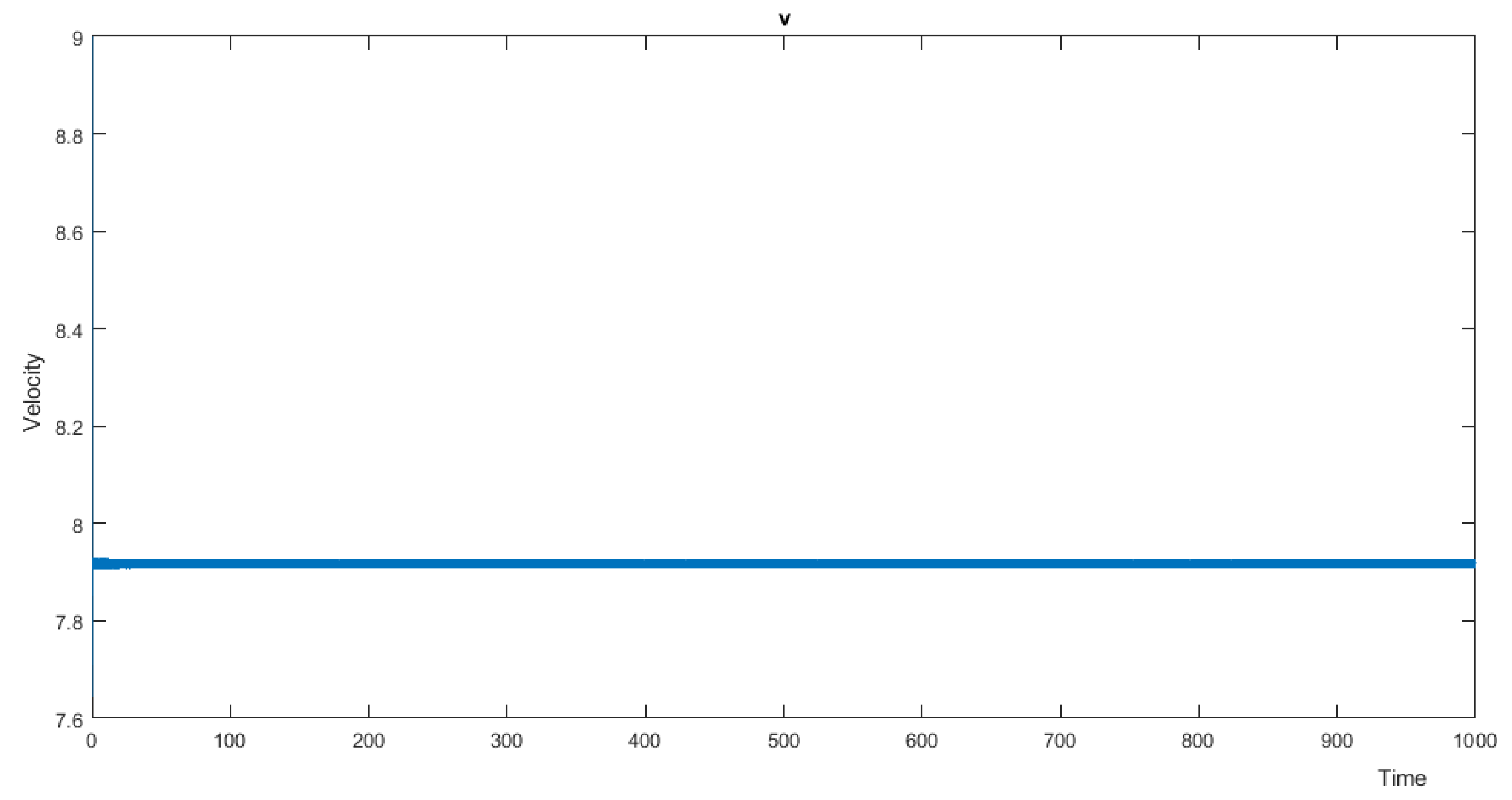
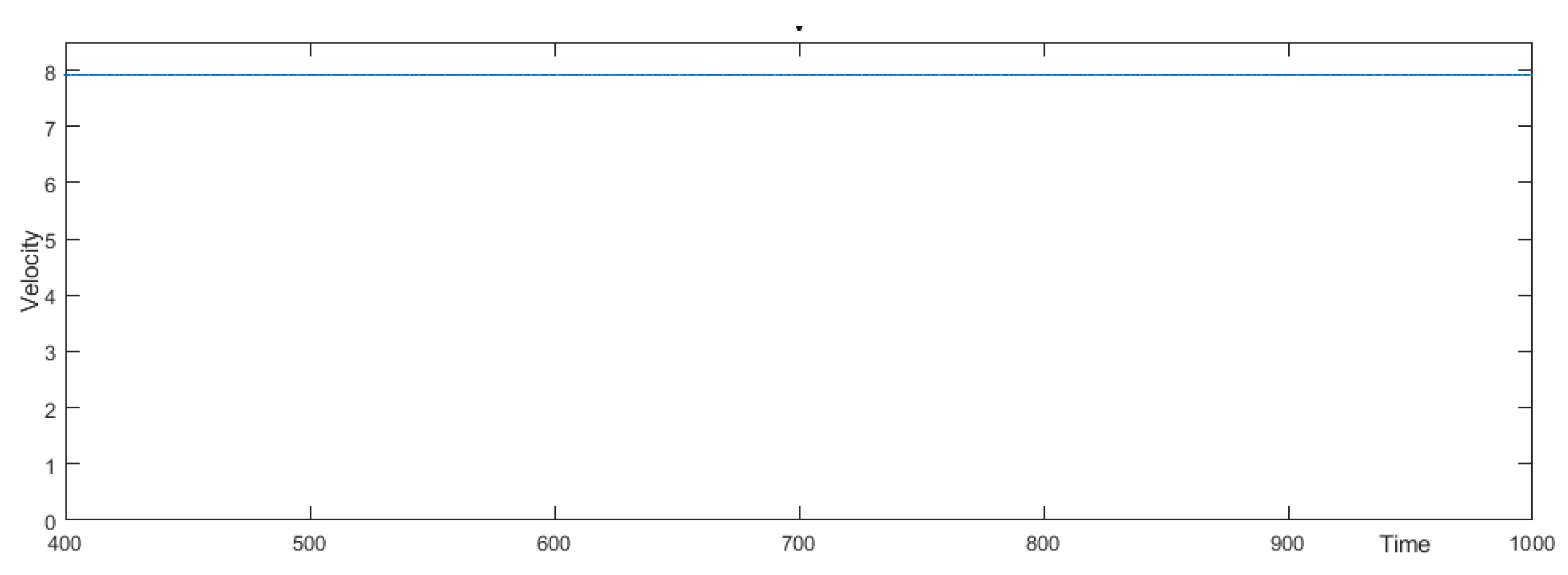
Note that these numerical experiments show the important fact that, as we stated in previous sections, for some values of the parameters, a fast time-dependent solution must exist in the basin of attraction of the fast stationary solution. This is very relevant from a practical point of view because it allows us to distinguish in which situations the device with a binary fluid works effectively, and velocity is not oscillating around zero, or by contrast, it presents complicated regimes where irregular or chaotic behaviors appear. In this sense, we would like to highlight the importance of taking
small enough. Observe that for
and
, the velocity of the system tends to
, even considering an initial velocity close to zero; see
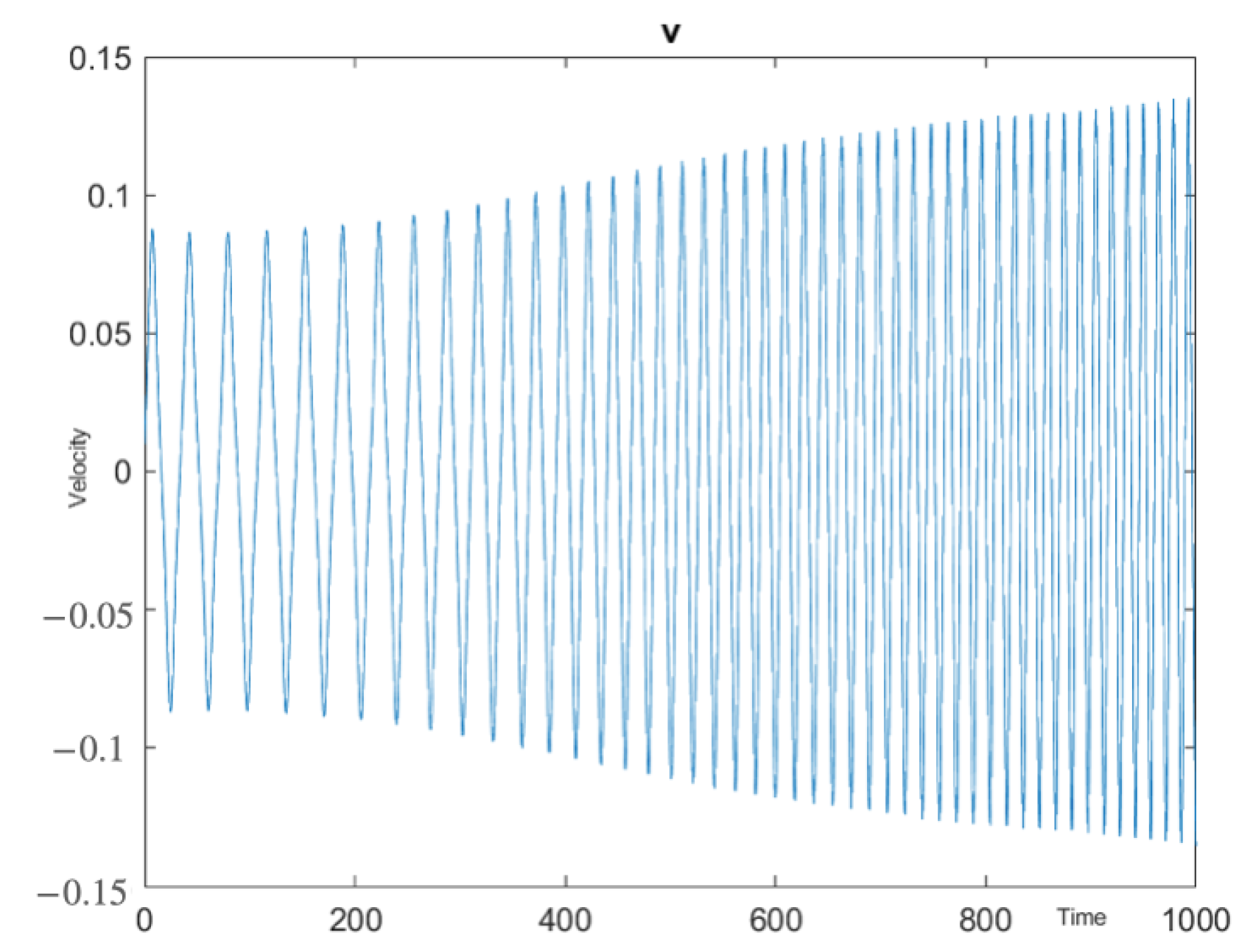
Figure 7. However, increasing
, the behavior of the velocity becomes involved. For instance, for
(see
Figure 8), we illustrate a scenario where the velocity does not stabilize and it is oscillating around zero.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







