
Online Frequency Estimation on a Building-like Structure Using a Nonlinear Flexible Dynamic Vibration Absorber

 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
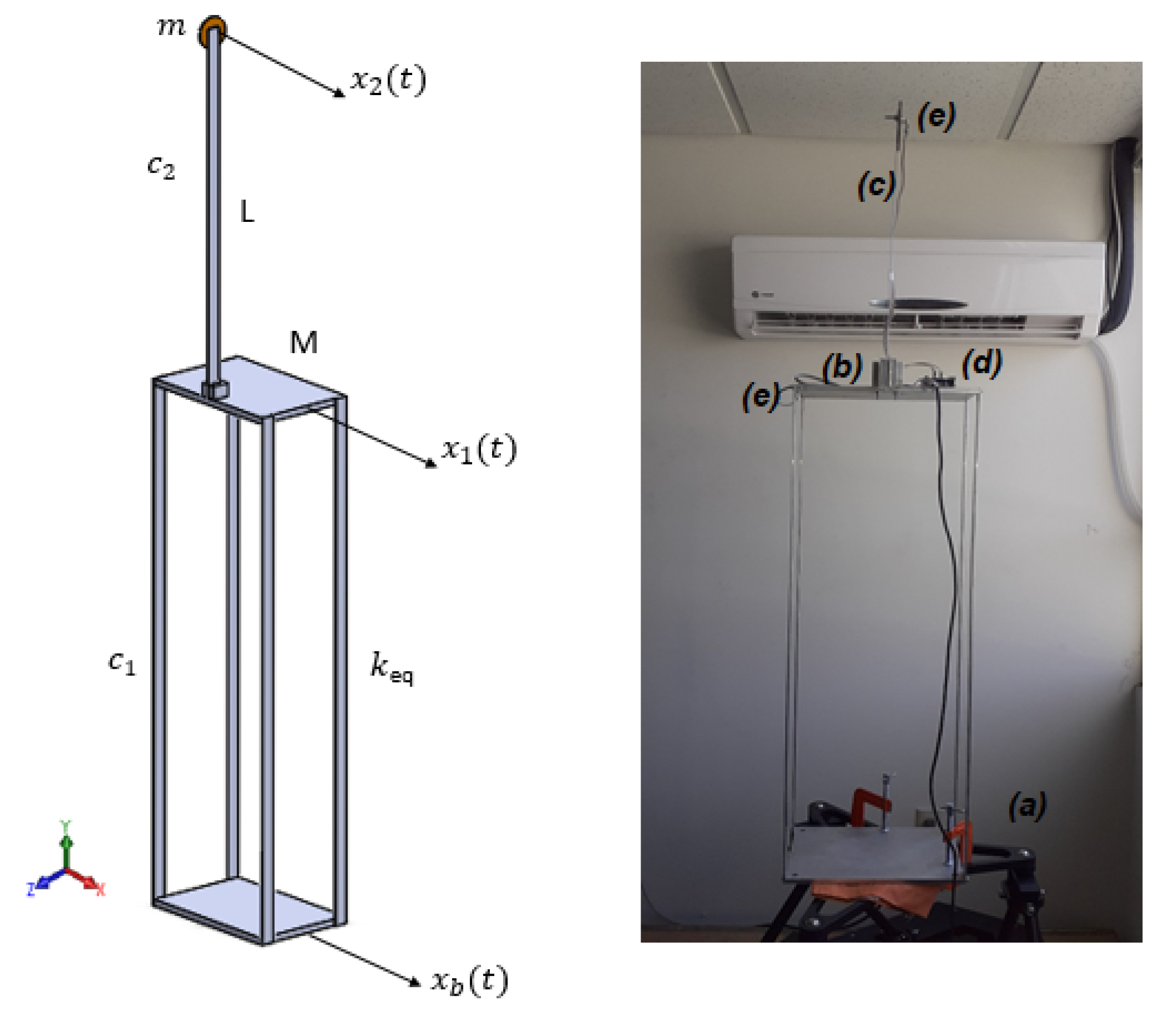
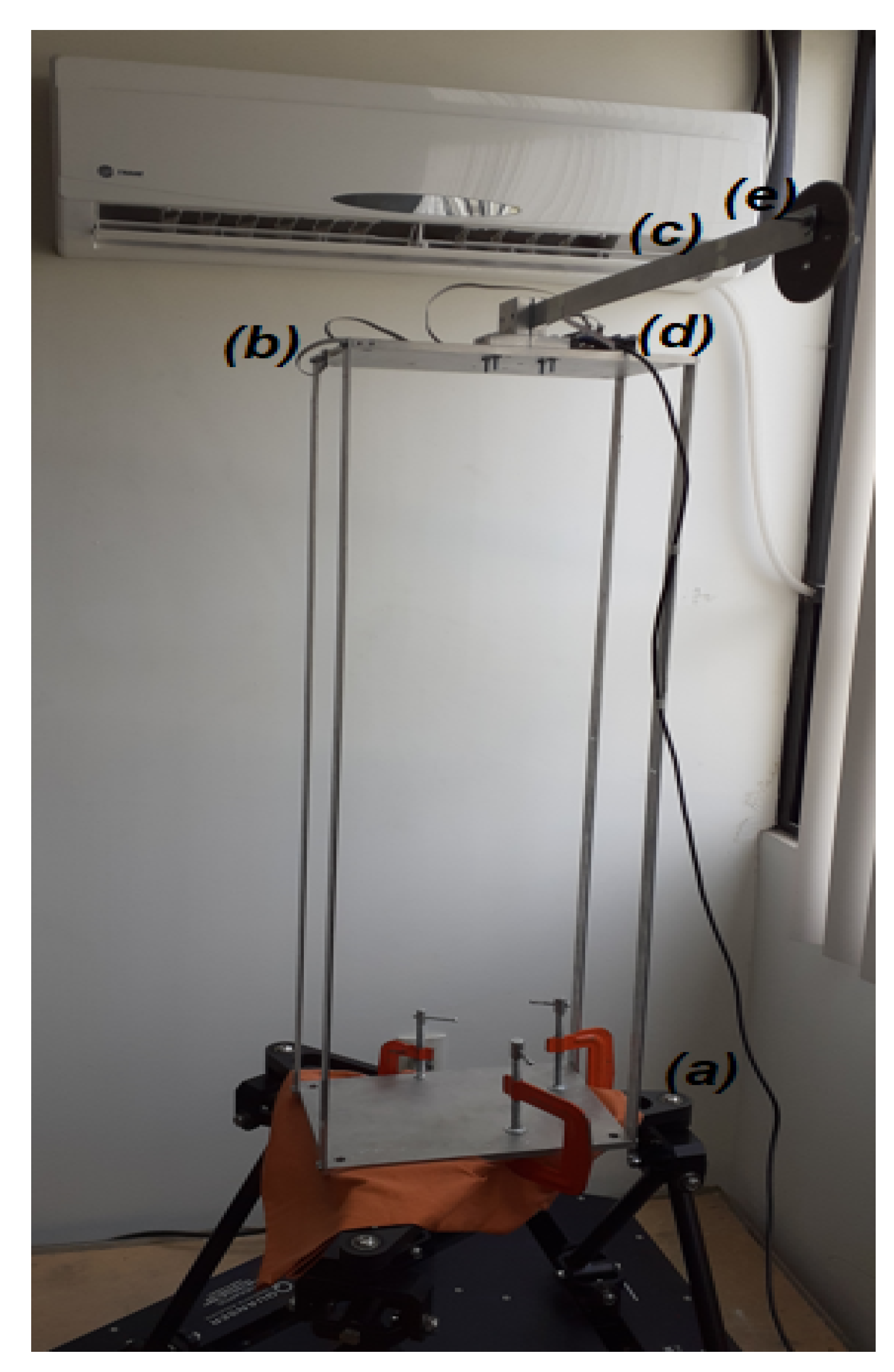
2. Building-like Structure with a Flexible Vibration Absorber
3. Online Algebraic Estimation of Harmonic Excitation Frequency
3.1. Frequency Estimation Using Position Measurements
3.2. Frequency Estimation Using Position, Velocity, or Acceleration Measurements
4. Simulation and Experimental Results
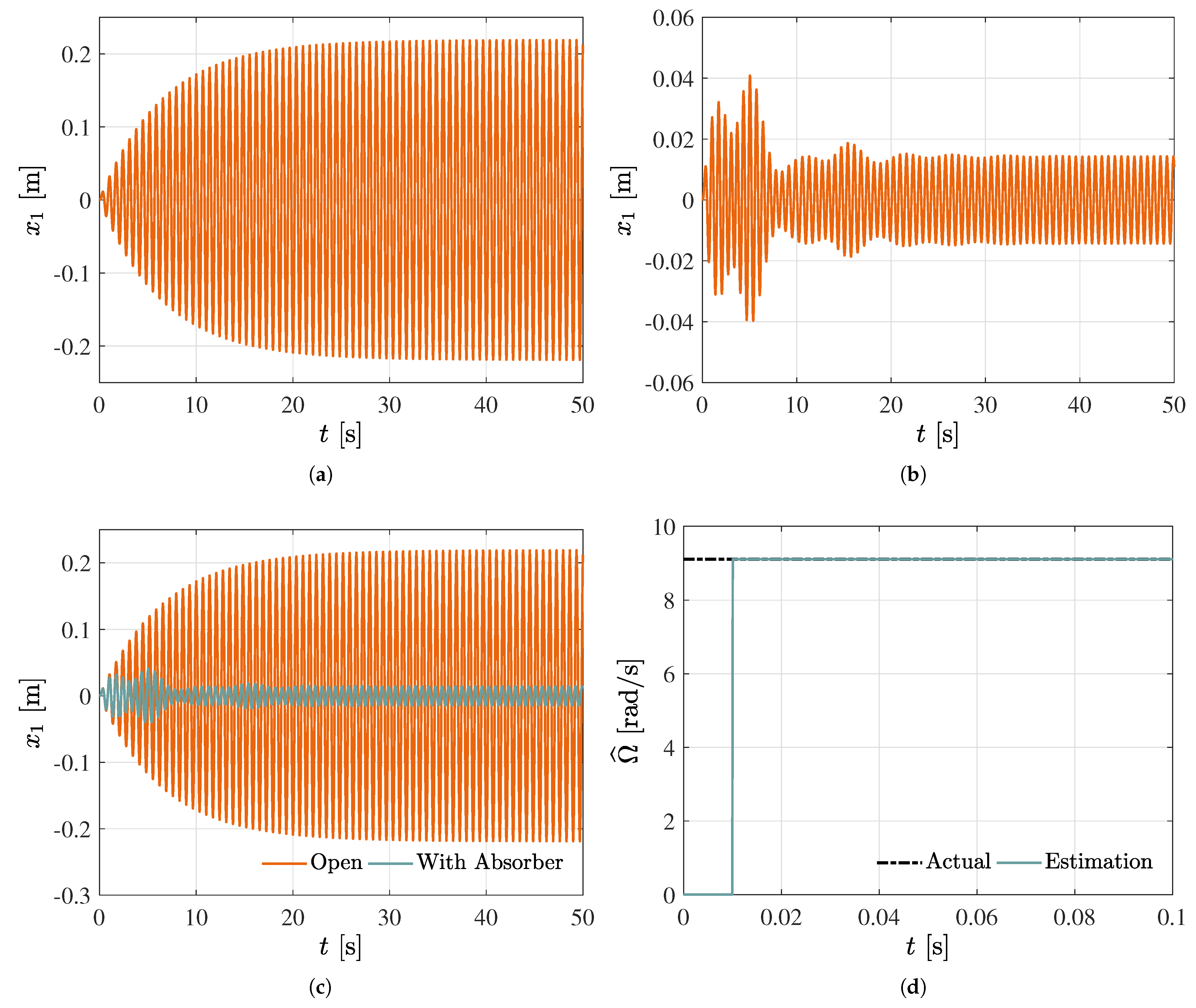
4.1. Simulation Case Study
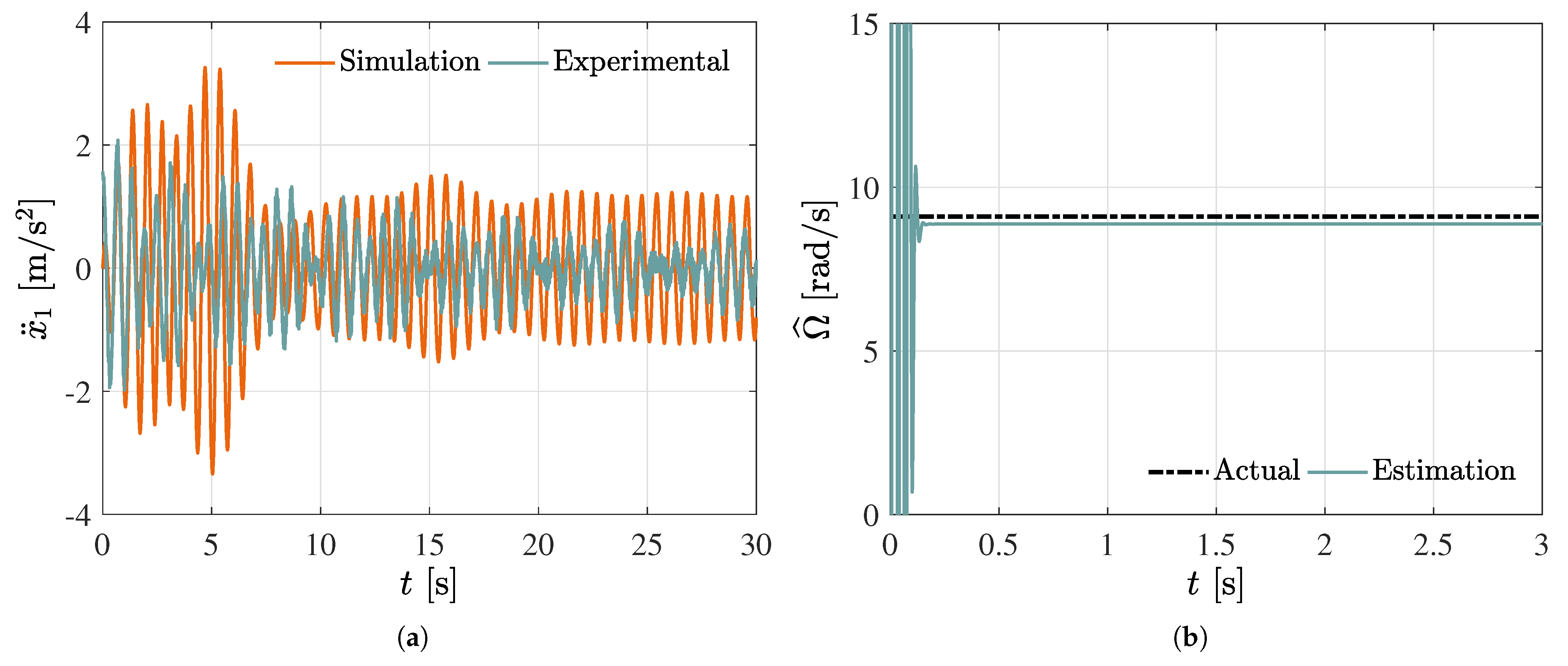
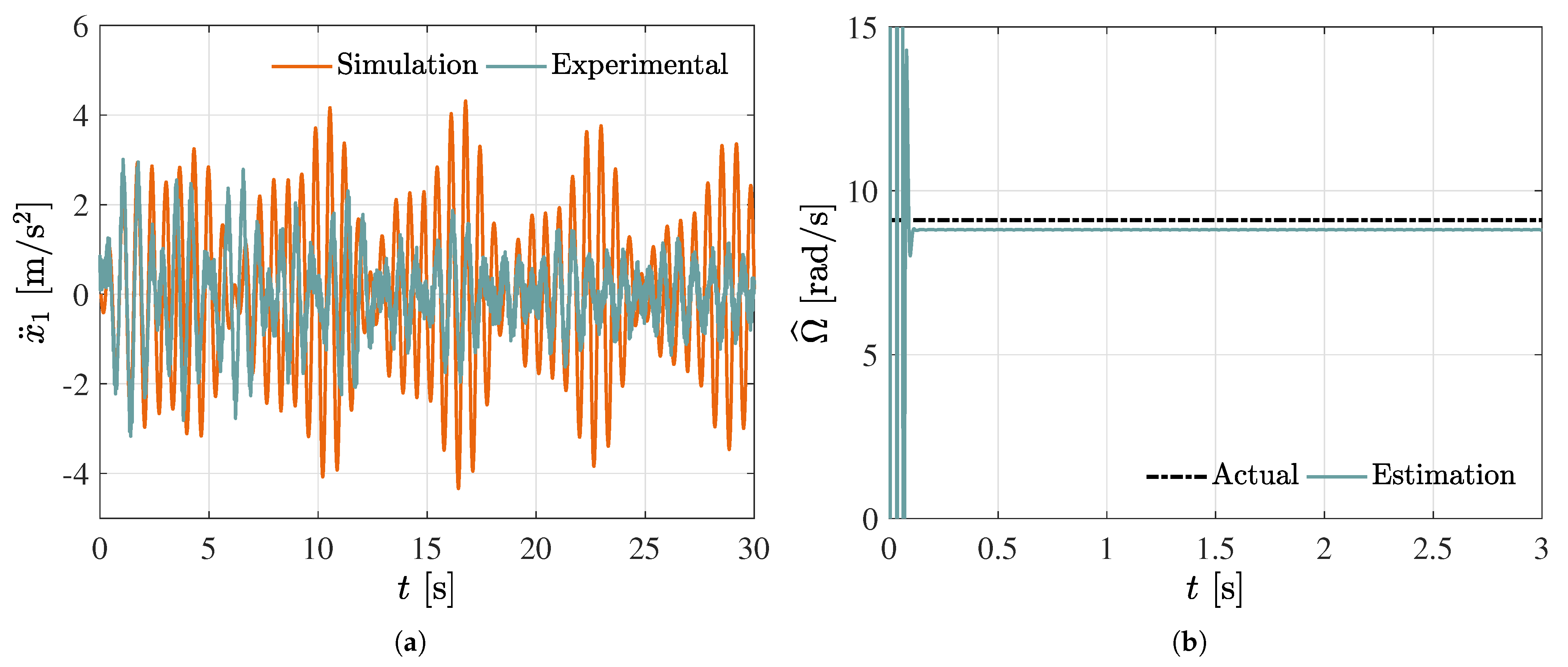
4.2. First Experimental Case Study
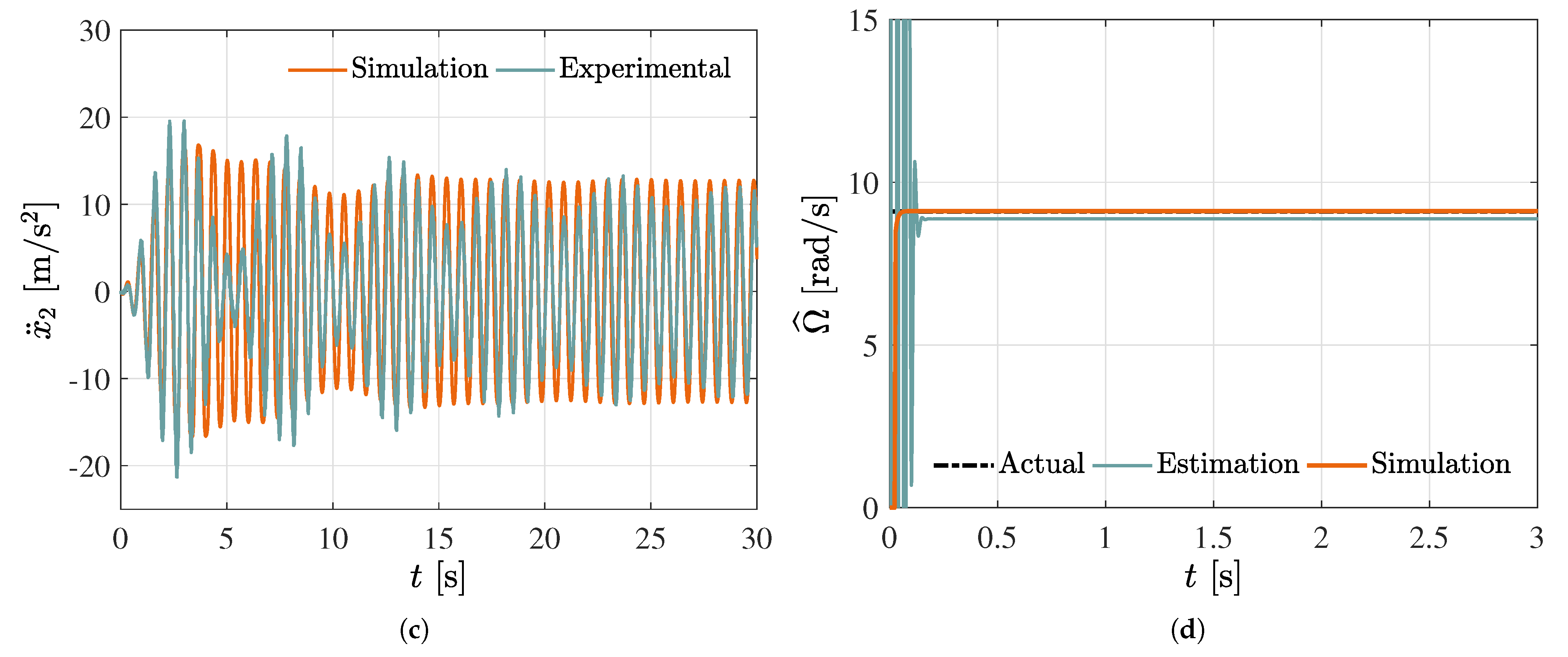
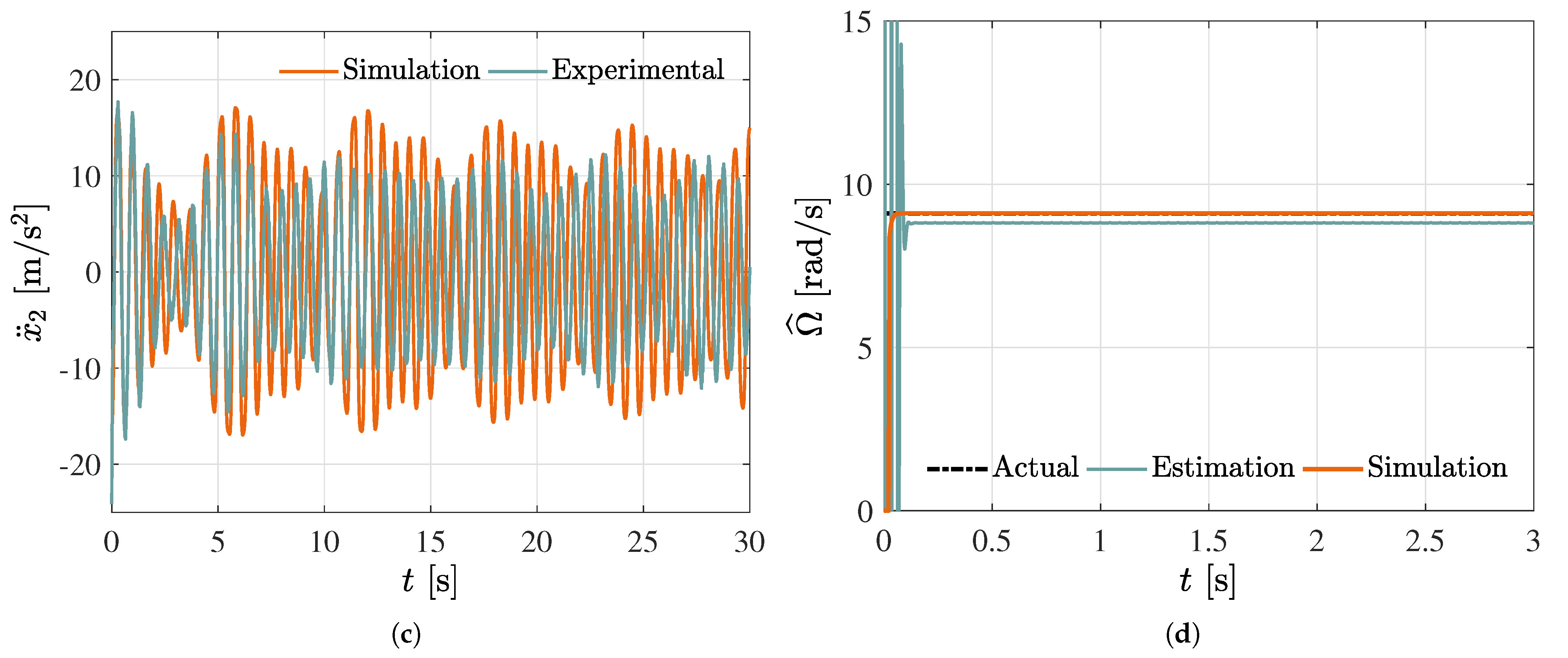
4.3. Second Experimental Case Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, J.; He, E.M.; Hu, Y.Q. Dynamic modeling and vibration suppression for an offshore wind turbine with a tuned mass damper in floating platform. Appl. Ocean Res. 2019, 83, 21–29. [Google Scholar] [CrossRef]
- Taghipour, J.; Dardel, M.; Pashaei, M.H. Vibration mitigation of a nonlinear rotor system with linear and nonlinear vibration absorbers. Mech. Mach. Theory 2018, 128, 586–615. [Google Scholar] [CrossRef]
- Korenev, B.G.; Reznikov, L.M. Dynamic Vibration Absorbers: Theory and Technical Applications; John Wiley & Sons: London, UK, 1993. [Google Scholar]
- Tian, M.; Gao, B. Dynamics analysis of a novel in-wheel powertrain system combined with dynamic vibration absorber. Mech. Mach. Theory 2021, 156, 104148. [Google Scholar] [CrossRef]
- Wu, Q.; Zhao, X.; He, S.; Tang, W.; Zheng, R. A bufferable tuned-mass damper of an offshore platform against stroke and response delay problems under earthquake loads. Shock Vib. 2016, 2016, 9702152. [Google Scholar] [CrossRef]
- Cao, E.Z.; Cai, Z.; Zhang, B.L.; Wang, B. Hybrid-Driven-Based H∞ Control for Offshore Steel Jacket Platforms in Network Environments. IEEE Access 2020, 8, 56151–56159. [Google Scholar] [CrossRef]
- Lee, H.J.; Shim, J.K. Multi-objective optimization of a dual mass flywheel with centrifugal pendulum vibration absorbers in a single-shaft parallel hybrid electric vehicle powertrain for torsional vibration reduction. Mech. Syst. Signal Process. 2022, 163, 108152. [Google Scholar] [CrossRef]
- Kecik, K. Simultaneous vibration mitigation and energy harvesting from a pendulum-type absorber. Commun. Nonlinear Sci. Numer. Simul. 2021, 92, 105479. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Silva-Navarro, G. Output feedback dynamic control for trajectory tracking and vibration suppression. Appl. Math. Model. 2020, 79, 793–808. [Google Scholar] [CrossRef]
- Preumont, A. Vibration Control of Active Structures An Introduction, 4th ed.; Springer: Cham, Switzerland, 2018. [Google Scholar]
- Beltran-Carbajal, F.; Silva-Navarro, G. Adaptive-Like Vibration Control in Mechanical Systems with Unknown Paramenters and Signals. Asian J. Control 2013, 15, 1613–1626. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Valderrabano-Gonzalez, A.; Favela-Contreras, A.R.; Rosas-Caro, J.C. Active disturbance rejection control of a magnetic suspension system. Asian J. Control 2015, 17, 842–854. [Google Scholar] [CrossRef]
- Goel, A.; Mobayen, S. Adaptive nonsingular proportional–integral–derivative-type terminal sliding mode tracker based on rapid reaching law for nonlinear systems. J. Vib. Control 2021, 27, 2669–2685. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mostafaee, J.; Alanazi, A.K.; Mobayen, S.; Vu, M.T.; Zhilenkov, A.; Abo-Dief, H.M. Nonsingular Terminal Sliding Mode Control Based on Adaptive Barrier Function for nth-Order Perturbed Nonlinear Systems. Mathematics 2022, 10, 43. [Google Scholar] [CrossRef]
- Alattas, K.A.; Mohammadzadeh, A.; Mobayen, S.; Abo-Dief, H.M.; Alanazi, A.K.; Vu, M.T.; Chang, A. Automatic Control for Time Delay Markov Jump Systems under Polytopic Uncertainties. Mathematics 2022, 10, 187. [Google Scholar] [CrossRef]
- Gao, P.; Walker, P.D.; Liu, H.; Zhou, S.; Xiang, C. Application of an adaptive tuned vibration absorber on a dual lay-shaft dual clutch transmission powertrain for vibration reduction. Mech. Syst. Signal Process. 2019, 121, 725–744. [Google Scholar] [CrossRef]
- Megahed, S.; Abd El-Razik, A.K. Vibration control of two degrees of freedom system using variable inertia vibration absorbers: Modeling and simulation. J. Sound Vib. 2010, 329, 4841–4865. [Google Scholar] [CrossRef]
- Arena, A.; Lacarbonara, W.; Casalotti, A. Payload oscillations control in harbor cranes via semi-active vibration absorbers: Modeling, simulations and experimental results. Procedia Eng. 2017, 199, 501–509. [Google Scholar] [CrossRef]
- Xiang, B.; Wong, W. Electromagnetic vibration absorber for torsional vibration in high speed rotational machine. Mech. Syst. Signal Process. 2020, 140, 106639. [Google Scholar] [CrossRef]
- Manchi, V.; Sujatha, C. Torsional vibration reduction of rotating shafts for multiple orders using centrifugal double pendulum vibration absorber. Applied Acoustics 2021, 174, 107768. [Google Scholar] [CrossRef]
- Wu, S.T.; Chen, Y.R.; Wang, S.S. Two-degree-of-freedom rotational-pendulum vibration absorbers. J. Sound Vib. 2011, 330, 1052–1064. [Google Scholar] [CrossRef]
- Gao, P.; Xiang, C.; Liu, H.; Walker, P.; Zhang, N. Design of the frequency tuning scheme for a semi-active vibration absorber. Mech. Mach. Theory 2019, 140, 641–653. [Google Scholar] [CrossRef]
- Shui, X.; Wang, S. Investigation on a mechanical vibration absorber with tunable piecewise-linear stiffness. Mech. Syst. Signal Process. 2018, 100, 330–343. [Google Scholar] [CrossRef]
- Wang, X.; Yang, B.; Guo, S.; Zhao, W. Nonlinear convergence active vibration absorber for single and multiple frequency vibration control. J. Sound Vib. 2017, 411, 289–303. [Google Scholar] [CrossRef]
- Ahmed, H.; Bierhoff, M.; Benbouzid, M. Multiple nonlinear harmonic oscillator-based frequency estimation for distorted grid voltage. IEEE Trans. Instrum. Meas. 2020, 69, 2817–2825. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, H.; Amamra, S.A.; Bierhoff, M. Frequency-locked loop-based estimation of single-phase grid voltage parameters. IEEE Trans. Ind. Electron. 2019, 66, 8856–8859. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Tapia-Olvera, R.; Valderrabano-Gonzalez, A.; Yanez-Badillo, H.; Rosas-Caro, J.; Mayo-Maldonado, J. Closed-loop online harmonic vibration estimation in DC electric motor systems. Appl. Math. Model. 2021, 94, 460–481. [Google Scholar] [CrossRef]
- Salighe, S.; Mohammadi, H. Semi-active nonlinear vibration control of a functionally graded material rotating beam with uncertainties, using a frequency estimator. Compos. Struct. 2019, 210, 367–380. [Google Scholar] [CrossRef]
- Fliess, M.; Sira-Ramírez, H. An algebraic framework for linear identification. ESAIM Control Optim. Calc. Var. 2003, 9, 151–168. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Silva-Navarro, G.; Trujillo-Franco, L.G. A sequential algebraic parametric identification approach for nonlinear vibrating mechanical systems. Asian J. Control 2017, 19, 1564–1574. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Silva-Navarro, G. Generalized nonlinear stiffness identification on controlled mechanical vibrating systems. Asian J. Control 2019, 21, 1281–1292. [Google Scholar] [CrossRef]
- Beltran-Carbajal, F.; Silva-Navarro, G.; Trujillo-Franco, L.G. On-line parametric estimation of damped multiple frequency oscillations. Electr. Power Syst. Res. 2018, 154, 423–432. [Google Scholar] [CrossRef]
- Trujillo-Franco, L.; Silva-Navarro, G.; Beltran-Carbajal, F. Algebraic Parameter Identification of Nonlinear Vibrating Systems and Non Linearity Quantification Using the Hilbert Transformation. Math. Probl. Eng. 2021, 2021, 5595453. [Google Scholar] [CrossRef]
- Trujillo-Franco, L.; Flores-Morita, N.; Abundis-Fong, H.; Beltran-Carbajal, F.; Dzul-Lopez, A.; Rivera-Arreola, D. Oscillation Attenuation in a Building-like Structure by Using a Flexible Vibration Absorber. Mathematics 2022, 10, 289. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| kg | GPa |
| kg | m |
| N/m | m |
| Ns/m | rad/s |
| Ns/m | m/s |
| (rad/s) | (rad/s) | Error (%) | |
|---|---|---|---|
| Simulation | 9.1058 | 9.1147 | 0.1 |
| Experimental | 9.1058 | 8.878 | −2.5 |
| (rad/s) | (rad/s) | Error (%) | |
|---|---|---|---|
| Simulation | 9.1058 | 9.1147 | 0.1 |
| Experimental | 9.1058 | 8.8190 | −3.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beltran-Carbajal, F.; Abundis-Fong, H.F.; Trujillo-Franco, L.G.; Yañez-Badillo, H.; Favela-Contreras, A.; Campos-Mercado, E. Online Frequency Estimation on a Building-like Structure Using a Nonlinear Flexible Dynamic Vibration Absorber. Mathematics 2022, 10, 708. https://doi.org/10.3390/math10050708
Beltran-Carbajal F, Abundis-Fong HF, Trujillo-Franco LG, Yañez-Badillo H, Favela-Contreras A, Campos-Mercado E. Online Frequency Estimation on a Building-like Structure Using a Nonlinear Flexible Dynamic Vibration Absorber. Mathematics. 2022; 10(5):708. https://doi.org/10.3390/math10050708
Chicago/Turabian StyleBeltran-Carbajal, Francisco, Hugo Francisco Abundis-Fong, Luis Gerardo Trujillo-Franco, Hugo Yañez-Badillo, Antonio Favela-Contreras, and Eduardo Campos-Mercado. 2022. "Online Frequency Estimation on a Building-like Structure Using a Nonlinear Flexible Dynamic Vibration Absorber" Mathematics 10, no. 5: 708. https://doi.org/10.3390/math10050708