

On Reliability Function of a k-out-of-n System with Decreasing Residual Lifetime of Surviving Components after Their Failures




Abstract
:1. Introduction and Motivation
- –
- we perform the reliability study of a k-out-of-n system, whose component failures change residual lifetime of the other components;
- –
- in the current paper, despite the fact that order statistics have already been applied to the study of k-out-of-n system reliability characteristics, we propose a novel application of order statistics to study of the lifetimes of components and the whole system.
2. State of the Problem: Notations and Examples
2.1. Problem Setting
- –
- time T to the first failure of the system,
- –
- reliability function of the system,
- –
- its two first moments,
- –
- high confidence quantiles;
- –
- sensitivity analysis of the system’s reliability function to the shapes of its components’ lifetime distribution.
2.2. Notations: Assumptions
- are symbols of probability and expectation;
- is the series of components’ lifetimes, which are supposed to be independent identically distributed (iid) random variables (rv);
- is their common cumulative distribution function (cdf);
- j is the system state, which means the number of failed components;
- is the set of the system states.
2.3. Examples
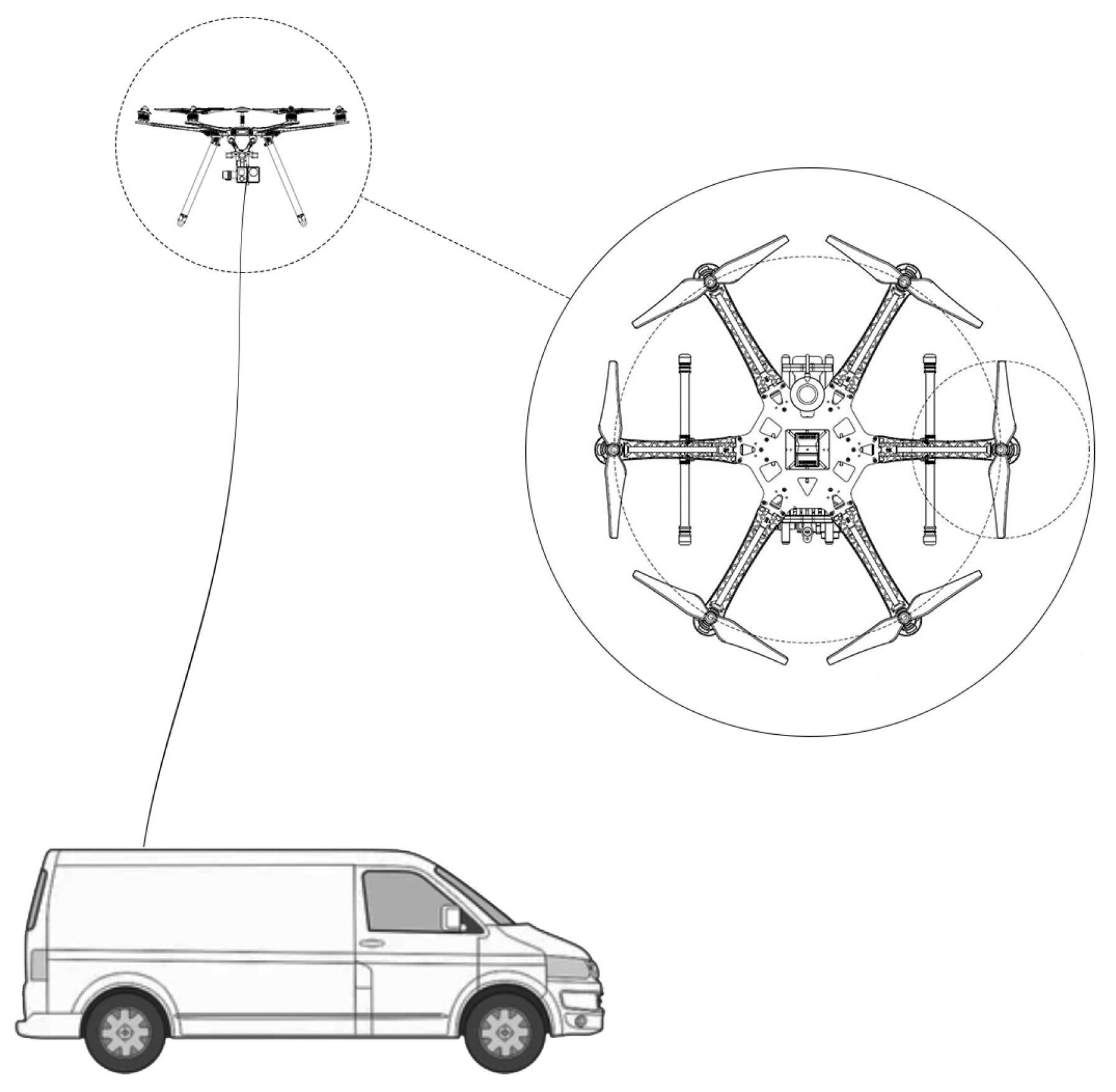
2.3.1. A Flight Module of a Tethered High-Altitude Telecommunication Platform
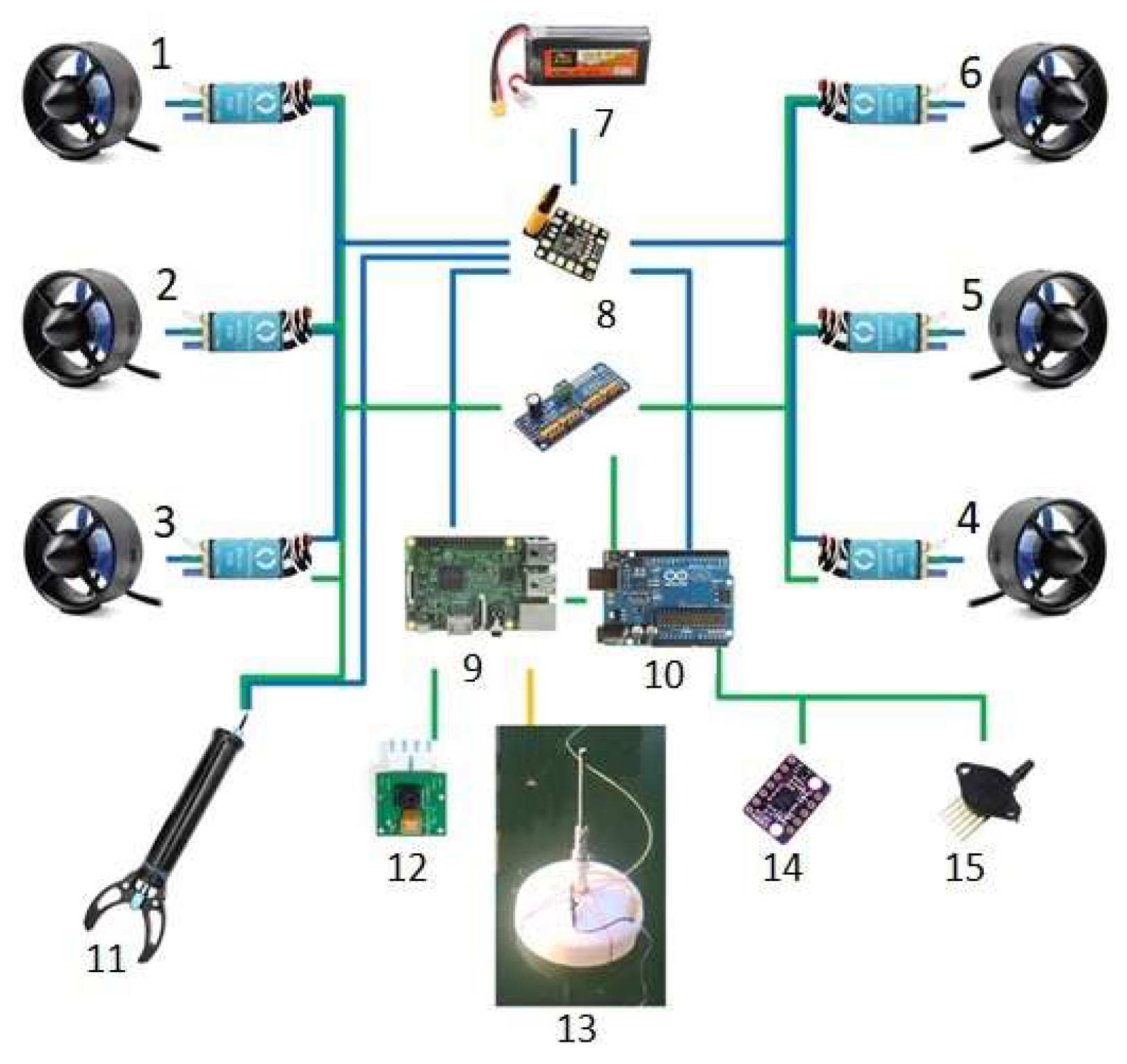
2.3.2. An Automated System for Remote Monitoring of a Sub-Sea Pipeline
- (1)
- in the case, when the system’s failure depends only on the number of its failed components. At that point, it is assumed that the device can perform its functions until at least 3 of its engines fail;
- (2)
- in the case, when the system’s failure depends also on the position of the failed components in the system. At that point, the UUV can perform its functions as long as at least two engines located on opposite sides, or any three engines are operational. Therefore, it could be considered to be a combination of -out-of- and 5-out-of- systems. For such a system, the special notation such as -out-of- system was used.
3. Distribution of the System’s Time to Failure
3.1. Preliminaries
3.2. Transformation of Order Statistics
3.3. Distribution of the System Failure Time
- –
- its reliability function ;
- –
- its mean lifetime ;
- –
- its lifetime variation .
3.4. A Special Case: Exponential Distribution
4. The General Calculation Procedure of the System Reliability Characteristics and Numerical Experiments
| Algorithm 1: General algorithm for calculation of reliability function |
Beginning. Determine: Integers , real , distribution of the system components’ lifetime and its pdf. Step 1. Taking into account that the system’s failure moment according to Formula (2) equals
Step 2. Taking into account that according to Formula (1), the joint distribution density of first k order statistics holds
Step 3. From the system reliability function , calculate – mean time to the system failure
– its variance
|
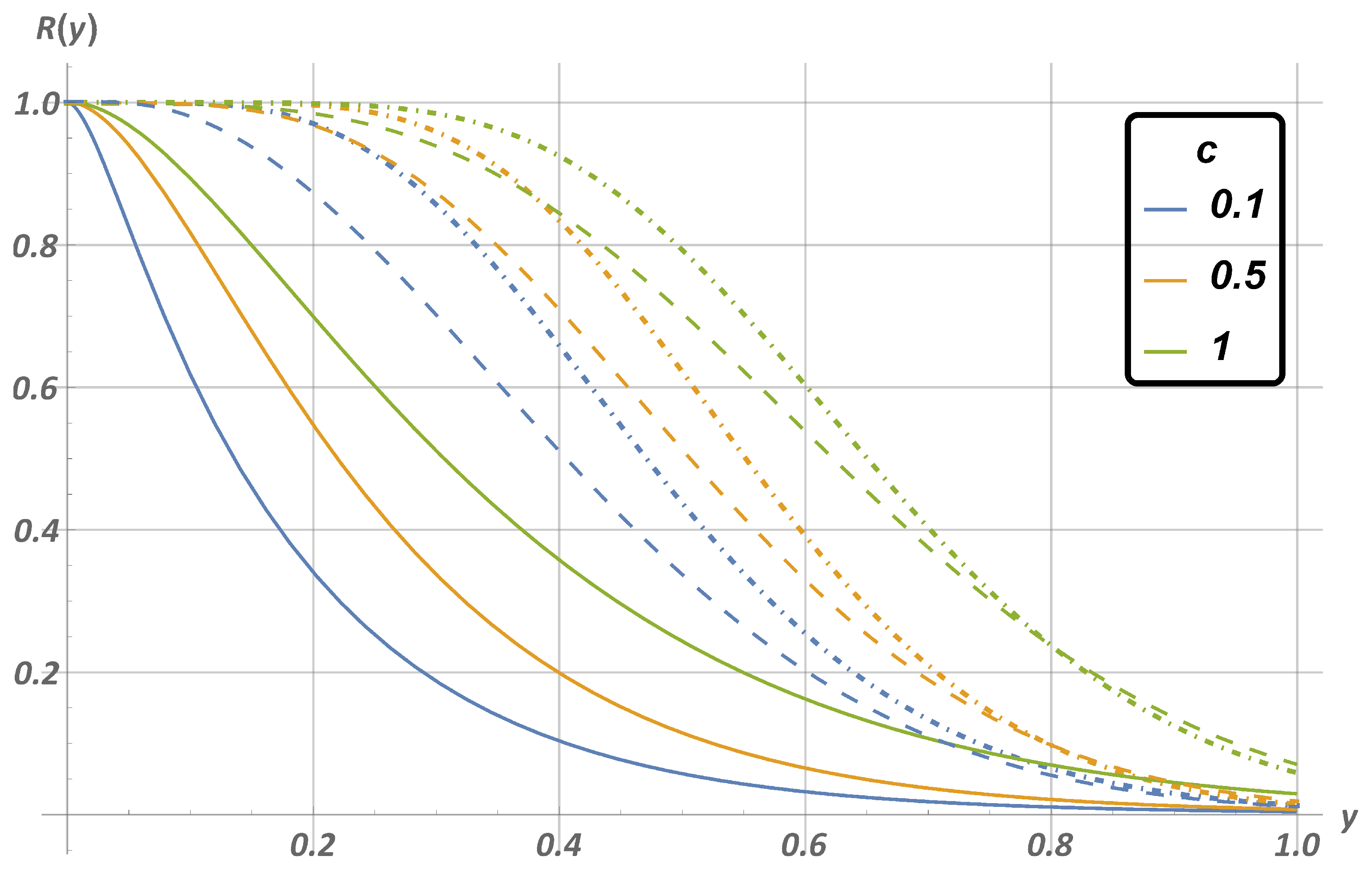
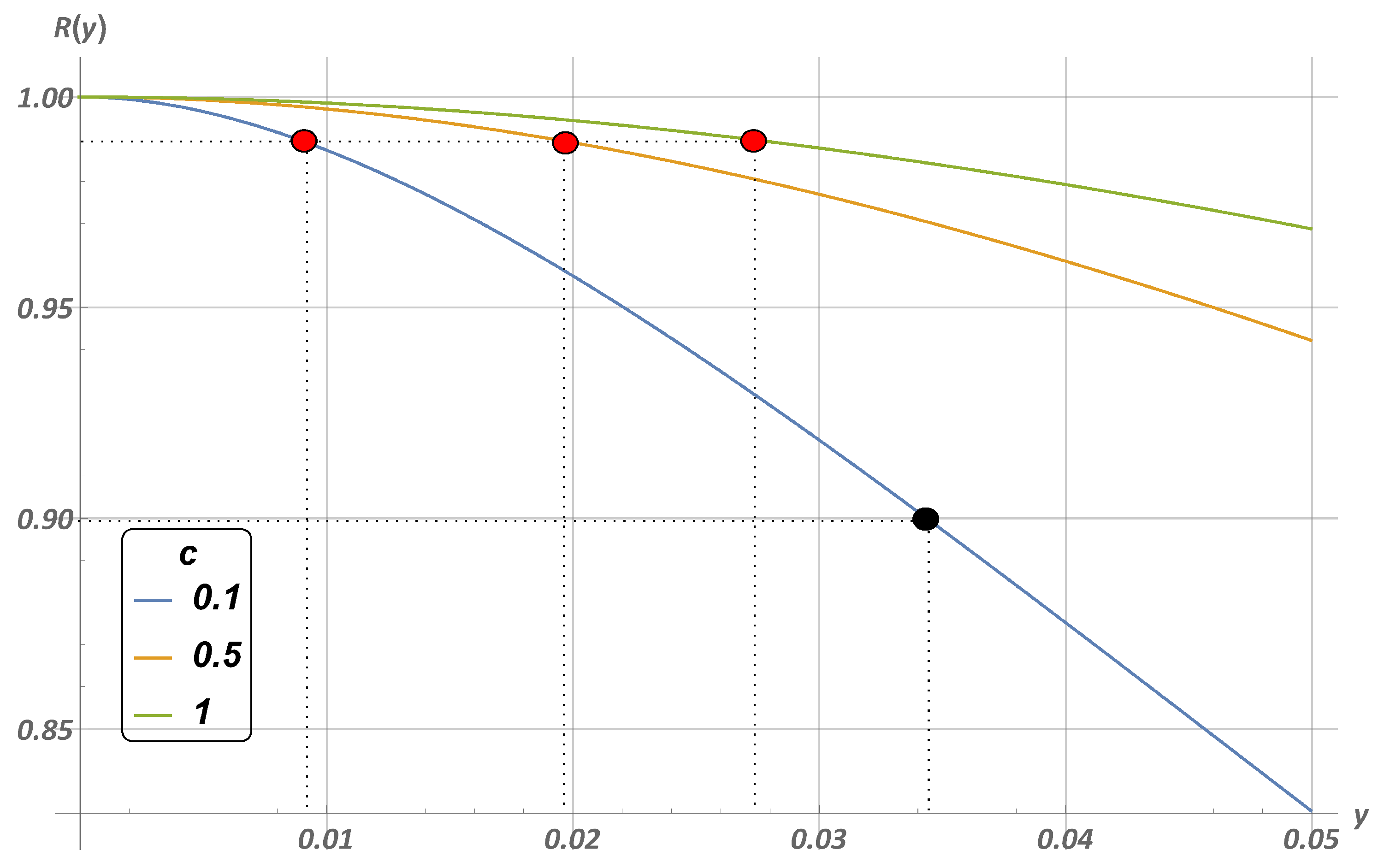
5. Numerical Experiments: 2-out-of-6 System
- a is a fixed mean components’ lifetime,
- is the shape parameter of distribution calculated based on the preset value of the coefficient of variation,
- is the coefficient of variation,
- is the standard deviation.
6. Conclusions and the Further Investigations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| iid | independent and identically distributed |
| rv | random variable |
| cdf | cumulative distribution function |
| probability density function | |
| UAV | Unmanned Aerial Vehicle |
| UUV | Unmanned Underwater Vehicle |
| mgf | moment generating function |
| Exponential distribution | |
| Gnedenko–Weibull distribution | |
| Erlang distribution |
References
- Trivedi, K.S. Probability and Statistics with Reliability, Queuing and Computer Science Applications, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2016. [Google Scholar] [CrossRef]
- Chakravarthy, S.R.; Krishnamoorthy, A.; Ushakumari, P.V. A k-out-of-n reliability system with an unreliable server and Phase type repairs and services: The (N, T) policy. J. Appl. Math. Stoch. Anal. 2001, 14, 361–380. [Google Scholar] [CrossRef] [Green Version]
- Rykov, V.; Kozyrev, D.; Filimonov, A.; Ivanova, N. On Reliability Function of a k-out-of-n System with General Repair Time Distribution. Probab. Eng. Inf. Sci. 2020, 35, 885–902. [Google Scholar] [CrossRef]
- Pascual-Ortigosa, P.; Sáenz-de-Cabezón, E. Algebraic Analysis of Variants of Multi-State k-out-of-n Systems. Mathematics 2021, 9, 2042. [Google Scholar] [CrossRef]
- Zhang, T.; Xie, M.; Horigome, M. Availability and reliability of (k-out-of-(M+N)): Warm standby systems. Reliab. Eng. Syst. Saf. 2006, 91, 381–387. [Google Scholar] [CrossRef]
- Gertsbakh, I.; Shpungin, Y. Reliability Of Heterogeneous ((k, r)-out-of-(n, m)) System. RTA 2016, 3, 8–10. [Google Scholar]
- Ushakov, I. A universal generating function. Sov. J. Comput. Syst. Sci. 1986, 24, 37–49. [Google Scholar]
- Ushakov, I. Optimal standby problem and a universal generating function. Sov. J. Comput. Syst. Sci. 1987, 25, 61–73. [Google Scholar]
- Levitin, G. The Universal Generating Function in Reliability Analysis and Optimization; Springer Series in Reliability Engineering; Springer: London, UK, 2005. [Google Scholar] [CrossRef]
- Kala, Z. New Importance Measures Based on Failure Probability in Global Sensitivity Analysis of Reliability. Mathematics 2021, 9, 2425. [Google Scholar] [CrossRef]
- Rykov, V.; Sukharev, M.; Itkin, V. Investigations of the Potential Application of k-out-of-n Systems in Oil and Gas Industry Objects. J. Mar. Sci. Eng. 2020, 8, 928. [Google Scholar] [CrossRef]
- Rykov, V.; Kochueva, O.; Farkhadov, M. Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring. J. Mar. Sci. Eng. 2021, 9, 85. [Google Scholar] [CrossRef]
- Vishnevsky, V.M.; Kozyrev, D.V.; Rykov, V.V.; Nguyen, D.P. Reliability modeling of an unmanned high-altitude module of a tethered telecommunication platform. Inf. Technol. Comput. Syst. 2020, 4, 26–36. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Y.; Li, X.; Huo, M.; Luo, H.; Yin, S. An adaptive remaining useful life prediction approach for single battery with unlabeled small sample data and parameter uncertainty. Reliab. Eng. Syst. Saf. 2022, 222, 108357. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Y.; Li, X.; Luo, H.; Yin, S.; Kaynak, O. Remaining Useful Life Prediction of Lithium-Ion Battery with Adaptive Noise Estimation and Capacity Regeneration Detection. IEEE/ASME Trans. Mechatron. 2022, 1–12. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, Y.; Wu, S.; Li, X.; Luo, H.; Yin, S. Prediction of remaining useful life based on bidirectional gated recurrent unit with temporal self-attention mechanism. Reliab. Eng. Syst. Saf. 2022, 221, 108297. [Google Scholar] [CrossRef]
- Eryilmaz, S. Phase type stress-strength models with reliability applications. Commun. Stat.—Simul. Comput. 2018, 47, 954–963. [Google Scholar] [CrossRef]
- Bai, X.; Shi, Y.; Liu, Y.; Liu, B. Reliability estimation of stress-strength model using finite mixture distributions under progressively interval censoring. J. Comput. Appl. Math. 2019, 348, 509–524. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, A.; An, L.; Li, M. Bayesian inference of system reliability for multicomponent stress-strength model under Marshall-Olkin Weibull distribution. Systems 2022, 10, 196. [Google Scholar] [CrossRef]
- Tang, Y.; Zhang, J. New model for load-sharing k-out-of-n : G system with different components. J. Syst. Eng. Electron. 2008, 19, 748–751, 842. [Google Scholar] [CrossRef]
- Hellmich, M. Semi-Markov embeddable reliability structures and applications to load-sharing k-out-of-n system. Int. J. Reliab. Qual. Saf. Eng. 2013, 20, 1350007. [Google Scholar] [CrossRef]
- Bairamov, I.; Arnold, B.C. On the residual lifelengths of the remaining components in an n − k + 1 out of n system. Stat. Probab. Lett. 2008, 78, 945–952. [Google Scholar] [CrossRef]
- Nguyen, D.P.; Kozyrev, D.V. Reliability Analysis of a Multirotor Flight Module of a High-altitude Telecommunications Platform Operating in a Random Environment. In Proceedings of the 2020 International Conference Engineering and Telecommunication (En&T), Dolgoprudny, Russia, 25–26 November 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Rykov, V.; Ivanova, N.; Kochetkova, I. Reliability Analysis of a Load-Sharing k-out-of-n System Due to Its Components’ Failure. Mathematics 2022, 10, 2457. [Google Scholar] [CrossRef]
- Katzur, A.; Kamps, U. Order statistics with memory: A model with reliability applications. J. Appl. Probab. 2016, 53, 974–988. [Google Scholar] [CrossRef]
- Cramer, E.; Kamps, U. Sequential order statistics and k-out-of-n systems with sequentially adjusted failure rates. Ann. Inst. Stat. Math. 1996, 48, 535–549. [Google Scholar] [CrossRef]
- Navarro, J.; Marco, B. Coherent Systems Based on Sequential Order Statistics. Nav. Res. Logist. 2011, 58, 123–135. [Google Scholar] [CrossRef]
- Sutar, S.; Naik-Nimbalkar, U.V. A load share model for non-identical components of a k-out-of-m system. Appl. Math. Model. 2019, 72, 486–498. [Google Scholar] [CrossRef]
- Kozyrev, D.V.; Phuong, N.D.; Houankpo, N.G.K.; Sokolov, A. Reliability evaluation of a hexacopter-based flight module of a tethered unmanned high-altitude platform. Commun. Comput. Inf. Sci. 2019, 1141, 646–656. [Google Scholar] [CrossRef]
- David, H.A.; Nagaraja, H.N. Order Statistics, 3rd ed.; John Wiley & Sons: New York, NY, USA, 2003. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| () | |||
| () | |||
| () |
| () | |||
| () | |||
| () |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rykov, V.; Ivanova, N.; Kozyrev, D.; Milovanova, T. On Reliability Function of a k-out-of-n System with Decreasing Residual Lifetime of Surviving Components after Their Failures. Mathematics 2022, 10, 4243. https://doi.org/10.3390/math10224243
Rykov V, Ivanova N, Kozyrev D, Milovanova T. On Reliability Function of a k-out-of-n System with Decreasing Residual Lifetime of Surviving Components after Their Failures. Mathematics. 2022; 10(22):4243. https://doi.org/10.3390/math10224243
Chicago/Turabian StyleRykov, Vladimir, Nika Ivanova, Dmitry Kozyrev, and Tatyana Milovanova. 2022. "On Reliability Function of a k-out-of-n System with Decreasing Residual Lifetime of Surviving Components after Their Failures" Mathematics 10, no. 22: 4243. https://doi.org/10.3390/math10224243