1. Introduction
As is well known, the Markovian jump system model has the advantage that it is very suitable for characterizing dynamic hybrid systems with abrupt parameters or structural changes (see [
1,
2,
3,
4]). Furthermore, it has also been recognized that the T-S fuzzy system model has an excellent ability to represent nonlinear systems by blending local linear systems (refer to [
5,
6,
7,
8,
9,
10,
11]). In this context, fuzzy Markovian jump systems (FMJSs) have become quite popular because these systems can systematically fuse the unique features of the above two system models. Accordingly, the FMJSs have been actively utilized in various application systems where nonlinearity and system mode change must be considered, for example in fields such as robotic, communication, network control, economic system, and power system [
12,
13,
14,
15,
16,
17,
18]. In particular, as reported in [
19,
20,
21], the introduction of the non-PDC scheme offers the advantage of decreasing the conservatism of the controller or filter design conditions. Thus, in light of the non-PDC scheme, Ref. [
22] developed the robust mode-independent state-feedback controller for homogeneous FMJSs, and Ref. [
23] designed the super-twisting controller for descriptor homogeneous FMJSs via integral sliding modes. In addition, Ref. [
24] addressed the problem of synchronous mode-dependent observer-based control for fractional-order fuzzy systems with homogeneous Markov process via the non-PDC scheme. Most recently, using the non-PDC scheme, Ref. [
25] addressed the problem of dissipative controller design for nonhomogeneous FMJSs with dual modes.
However, one noteworthy point is that further investigation is still needed to consider the asynchronism and nonhomogeneity when designing filters of FMJSs according to the non-PDC scheme.
Moreover, an event-triggered mechanism has received considerable attention in recent years due to its advantages of reducing the transmitted data throughput and/or computation times. In fact, since the non-PDC scheme requires more computational load compared to the PDC scheme due to inverse matrix operations, performing such operations every time acts as a factor that reduces the efficiency of hardware resources. For this reason, the number of times to update the fuzzy filter gains also needs to be reduced by automatically activating the non-PDC and fuzzy basis function (FBF) modules according to an event-triggered mechanism. To realize this, two additional design requirements must be considered along with the filter design problem: (i) one is that the current system operation mode cannot be precisely used for filter operation, and (ii) the other is that the current premise variables of FBF cannot be accurately obtained real-time. In [
26], a study of event-triggered and reduced-order filtering for homogeneous FMJSs was performed with consideration of asynchronous filter modes. In addition, Ref. [
27] addressed the adaptive event-triggered finite-time filtering problem for interval type-2 homogeneous FMJSs with asynchronous modes, and Ref. [
28] investigated the event-triggered asynchronous filtering problem of semi-FMJSs subject to deception attacks. Besides, under imperfect premise matching, Ref. [
29] addressed the networked
fuzzy filtering problem of homogeneous FMJSs. Indeed, all of the above studies provide successful results in designing event-triggered and networked filters under practical constraints. However, it is also true that more attention needs to be paid to simultaneously meet the above requirements in the non-PDC filtering problem of nonhomogeneous FMJSs.
To compensate for the shortcomings of the previous studies, this paper aims to co-design a fuzzy-basis-dependent event generator and an asynchronous filter of nonhomogeneous FMJSs via an event-triggered non-PDC scheme. To this end, this paper provides a method to transform the nonconvex form of filter design conditions into the parameterized linear matrix inequality (PLMI)-based form by utilizing the congruence transformation and the matrix inequality-based decoupling method. After that, based on the proposed relaxation process, the PLMI-based conditions are transformed into the LMI-based conditions in a less conservative manner. The detailed contributions of this paper can be summarized as follows.
In contrast to other studies based on the PDC scheme, to enhance the performance improvement, this paper uses a non-PDC scheme when designing asynchronous mode-dependent fuzzy filter gains. In addition, the mode- and fuzzy-basis-dependent event weighting matrices are employed to construct the event generation function.
By taking the design requirements (i) and (ii) into account, this paper proposes a method such that at the moment when the event generation condition is satisfied, the system mode can be transmitted to the filter side, and the non-PDC and FBF modules can be activated. In particular, the problem of mismatched fuzzy basis functions, caused by using the event-triggered outputs as the source of premise variables on the filter side, is effectively addressed by considering their errors from the original.
The relaxation of the PLMI-based conditions is effectively performed (i) by simultaneously addressing three types of time-varying parameters, i.e., transition probabilities, fuzzy basis functions, and mismatched fuzzy basis functions, and (ii) by reflecting two zero equalities of transition probabilities and mismatch errors in the relaxation process so that less conservative LMIs can be derived from PLMIs.
Notations: denotes the set
.
(
) means that
P is real symmetric and positive semidefinite (definite). In symmetric block matrices, the asterisk
is used as an ellipsis for terms induced by symmetry.
denotes the mathematical expectation;
stands for a block-diagonal matrix;
;
; and
is the
-dimensional identity matrix.
denotes the
dimensional standard simplex. For
, the following notations are used:
where
denotes a real submatrix or a scalar value.
2. System Description and Preliminaries
For a given probability space
, let us consider the following FMJS with the system mode
:
where
,
,
, and
denote the state, the disturbance input that belongs to
, the measurement output, and the performance output;
is characterized by a discrete-time Markov chain operating according to
; and for
,
in which
denotes the normalized fuzzy basis (or called fuzzy weighting) function vector goverend by the premise variable
; and
r denotes the number of IF-THEN fuzzy rules. Specifically, in (
1),
and
satisfy
and
. Furthermore, to consider realistic situations, the mode set of
is classified into two subsets such that
:
where
contains the set
because the transition probability essentially satisfies
.
Next, let us consider the following output error between the current and transmitted outputs, caused by the event-triggered mechanism:
where
indicates the last transfer time instance and
represents the corresponding index number. Based on the output error, the event-triggered mechanism operates according to the following fuzzy-basis-dependent event generation function:
where
denotes the fuzzy-basis-dependent event weighting matrix to be determined later, and
denotes the given event threshold matrix with
for all
. In other words, the transmission of both output and system mode is triggered at the following time instance:
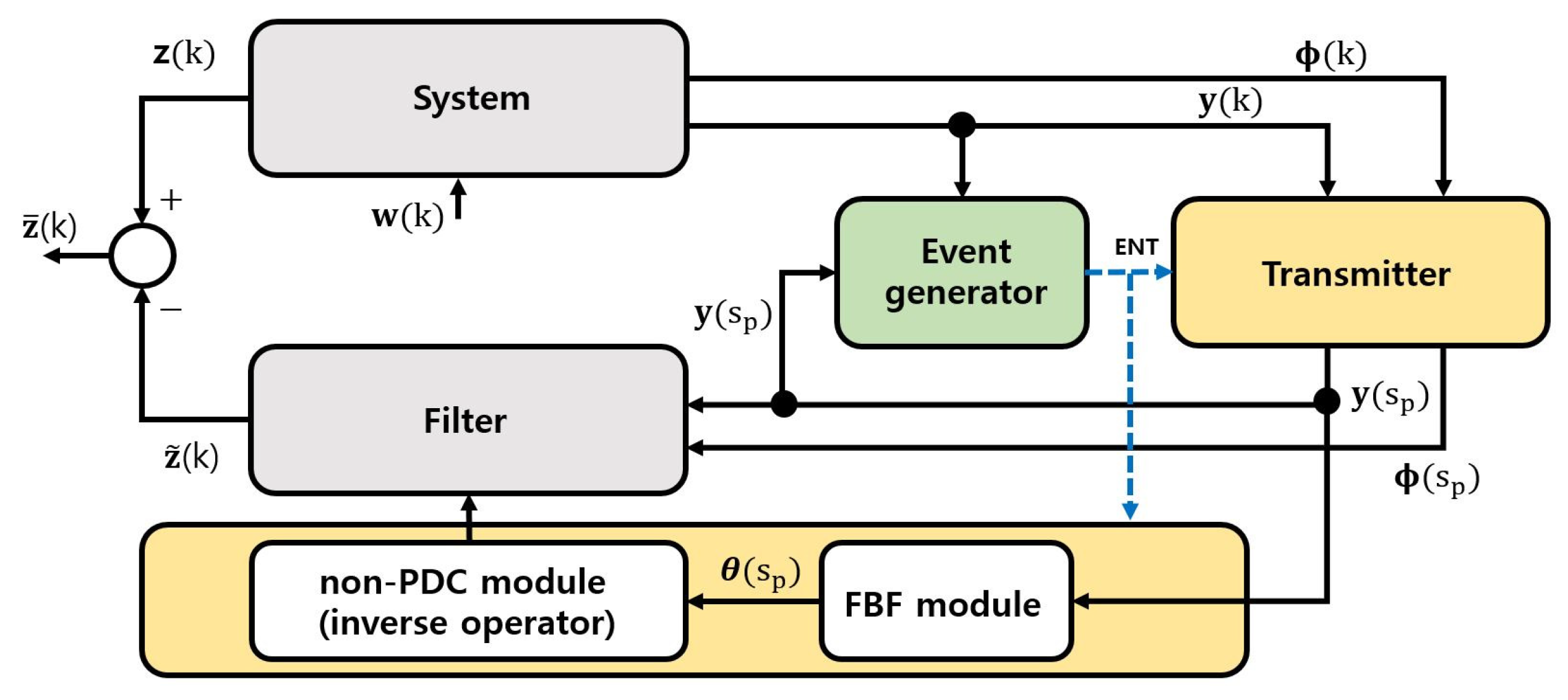
As shown in
Figure 1, this paper aims to design a filter that estimates the performance output
using the measured output
under an event-triggered mechanism. The event-triggered mechanism is operated through the event generator and the transmitter, where the event generator outputs an ENT signal to the transmitter at the moment (
5) holds (i.e., at
), and the transmitter is activated by the ENT signal and sends the measured output signal
and system mode
to the next modules. In particular, the FBF module is used to construct the event-triggered fuzzy basis function
from the transmitted output
, and the non-PDC module calculates the
-dependent filter gains using the inverse operation.
Remark 1. The event generator performs calculations (3) and (4), and then generates an ENT signal at the moment (5) holds. With a cascade connection, the transmitter is activated by the ENT signal and sends the measured output and system mode to the filter and the FBF module. Remark 2. As can be seen from Figure 1, the role of the ENT signal can be specifically divided into two categories. The first is to determine the timing at which the transmitter is activated. When the transmitter is activated, the triggered output signal and can be sent to the next modules. The second is to activate the filter gain update process consisting of the FBF module and the non-PDC module. Ultimately, the ENT-based update process can reduce the number of inverse operations to be driven in the non-PDC module. Constraint 1. To reduce data throughput, this paper proposes a protocol that allows the system mode to be transmitted to the filter side at time instance . Thereupon, the filter mode is maintained at for , which becomes asynchronous with the system mode for that time interval. In this regard, as a form of representing the asynchronism between and , this paper employs the following conditional probability:which satisfies . In practice, one can utilize the relative frequency distribution method [30] to construct from data for pairs. Constraint 2. In the considered protocol, since the output signal is transmitted to the filter side only at , the fuzzy basis function must be constructed using the transmitted output via the FBF module in Figure 1, and the fuzzy-basis-dependent filter has no choice but to be designed on the basis of via the non-PDC module in Figure 1. Meanwhile, since the mismatched fuzzy basis function is given from , the following properties still hold: and , for all . Thus, the mismatch error satisfieswhere is introduced as a tunable upper bound to improve filtering performance. In practice, the setting of will be verified via the transient responses of and . Remark 3. Since the fuzzy basis function of filter, i.e., , corresponds to an instantaneous value of at , it still follows the fundamental properties of , that is, and , for all .
By considering (
2)–(
7), subject to Constraints 1 and 2:
where
and
denote the filter state and the estimated performance output, respectively;
stands for the asynchronous filter mode; and the filter gains
,
, and
are obtained later according to the non-PDC scheme [
20].
Remark 4. In comparison to PDC, the non-PDC scheme demands more computational burden to calculate the fuzzy filter gains. Thus, based on (8), this paper proposes a method such that follows even if the filter gains are updated only when the output is transmitted (i.e., at time instance . Before going ahead, for the sake of simplicity, we use the following notations hereafter:
,
,
,
,
,
,
,
, and
for any matrix
. In addition, we define
and
to represent the transition probability of (
2) as follows:
As a result, letting
we can obtain the following filtering error system from (
1) and (
8):
where
Lemma 1 ([
31]).
Let us consider the fuzzy-basis-dependent matrix . Then, holds if it holds that Definition 1 ([
32]).
For any initial condition, system (10) with is stochastically stable if it holds that Definition 2 ([
33]).
For the zero initial condition, suppose the energy supply function satisfies that for a given scalar and any ,with the following quadratic energy supply rate:where (i.e., ), , and are given real matrices. Then, system (10) is said to be strictly dissipative, and β denotes the dissipativity performance level. 3. Asynchronous Mode-Dependent Filter Design
Let us choose a mode- and fuzzy-basis-dependent Lyapunov function candidate of the following form:
where
.
The following lemma presents the stochastic stability and strict
-
-dissipativity condition of (
10) subject to (
5).
Lemma 2. The filtering error system (10) is stochastically stable and strictly -β-dissipative if it holds that Proof of Lemma 2. First, let us consider the case of
. Then, since the event-triggered mechanism allows
on the basis of (
5), condition (
18) ensures
which can be represented as
with a sufficiently small scalar
. Thus, for
, it follows that
As a result, since it is satisfied that
the filtering error system (
10) is stochastically stable in the absence of disturbances according to Definition 1.
Next, let us consider the case where
and
(i.e.,
). Then, since (
18) ensures
it is obvious that
which means that the filtering error system (
10) is strictly
-
-dissipative according to Definition 2. □
The following lemma presents the stochastic stability and strict
-
-dissipativity condition of (
10) subject to (
5), formulated in terms of multi-parameterized linear matrix inequalities (MPLMIs).
Lemma 3. For prescribed
and
, suppose that there exist a scalar
and matrices
,
,
,
,
such that for all
g and
, it holds that
where
Then the filtering error system (
10) is stochastically stable and strictly
-
-dissipative, and the fuzzy filter gains
and
are designed via the non-PDC scheme as follows:
,
.
Proof of Lemma 3. In order to facilitate the later discussion, let us define
Then, the filtering error system (
10) can be rewritten as follows:
where
Furthermore, based on (
17) and (
28), it is valid that
where
Accordingly, from (
27) and (
29), it follows that
Continuing, (
4) and (
16) lead to
Thus, combining (
30)–(
32) results in
where
As a result, the condition
ensures the stochastic stability and strict dissipativity condition (
18) in Lemma 2, and the Schur complement of
is formulated as follows:
In what follows, note that (
23) leads to
Thus, since (
26) implies
the nonsingular matrix
in (
25) can be used for a congruence transformation on (
34), and
is also invertible.
Pre- and post-multiplying (
34) by
and its transpose and by using
, it is given that
where
,
,
,
,
,
, and
. Specifically, based on (
11)–(
13), (
25), and (
35), the block matrices in (
36) can be described as follows:
where
and
. Therefore, condition (
36) boils down to (
26), which becomes the stochastic stability and strict
-
-dissipativity condition. □
The following theorem presents the stochastic stability and strict
-
-dissipativity condition of (
10) subject to (
5), formulated in terms of LMIs by establishing
Theorem 1. For prescribed and , suppose that there exist a scalar and matrices , , , , ,such that for all , it holds that:withwherein which , , ,, , , , , , , , , , , , . Then the filtering error system (10) is stochastically stable and strictly -β-dissipative, and the fuzzy filter gains are calculated via the non-PDC module in Figure 1 as follows: Proof of Theorem 1. From (
2) and (
9), it follows that
In addition, based on
, it is available that
Thus, using (
45) and (
46), condition (
26) is written as follows:
where
in which
Furthermore, condition (
47) holds if it is satisfied that
First, by (
37), (
38), and
condition (
48) can be rearranged as follows:
where
and
are defined in (
43) and (
44), respectively. Thereupon, owing to
, condition (
51) is converted into
Subsequently, from (
7), i.e.,
, it follows that
Thus, noting that
condition (
52) becomes
Moreover, since (
39) implies
, it holds by (
7) that
Accordingly, condition (
54) is ensured by
which is transformed by the Schur complement into
Hence, with the aid of Lemma 1, the relaxed conditions of (
57) are given as (
39) and (
40).
(ii) Next, since (
41) implies
, i.e.,
it holds by (
9) that
Thus, condition (
49) is ensured by
Hence, by the Schur complement and based on (
38), (
50), and (
58), condition (
60) is transformed into
which is converted into (
41) owing to
.
(iii) Finally, based on (
38), condition (
27) is represented as
which is converted into (
42) owing to
. □
Remark 5. In this paper, the PLMIs with and are transformed into by using the bounds and zero equality of the error between and , and setting the replacement variables and as (37). Thus, the non-PDC-based PLMIs in Lemma 3 can be also relaxed according to Lemma 1, as shown in the proof of Theorem 1. As a by-product of Theorem 1, the following corollary considers a special case where and , for all g.
Corollary 1. For given and , suppose that there exist a scalar and matrices , , , , , , such that for all , LMIs (39), (40), and (42) hold, wherein which Then the filtering error system (10) is stochastically stable and strictly -β-dissipative, and the fuzzy filter gains are designed as follows: , , and Proof of Corollary 1. Conditions (
26) and (
27) are represented, respectively, as follows:
Thus, since
and
, conditions (
62) and (
63) can be converted into
and (
42), respectively. Moreover, by Lemma 1, the relaxed form of
is given as (
39) and (
40). □
4. Illustrative Examples
In this section, two examples are presented: the first example assumes (i.e., ) and (i.e., ) for comparison with previous studies, but the second example shows our results for the case where the assumptions of the first example are not enforced.
Example 1 (for
and
).
Let us consider the following discrete-time FMJS with and , used in [34]where the fuzzy basis functions are given as and . In addition, the transition rates and conditional probabilities are given as follows: Table 1 and
Table 2 show the maximum dissipativity performance levels
for
and several
, obtained by Theorem 2 in [
26] and Corollary 1, where
,
,
. From
Table 1 and
Table 2, it can be found that the dissipativity performance deteriorates as the event threshold
increase. Furthermore, Corollary 1 provides better performance levels than those of Theorem 2 in [
26] for all
. In particular, the effect of Corollary 1 become more pronounced as the order of the filter increases.
Meanwhile, for
and
, Corollary 1 offers the following solution:
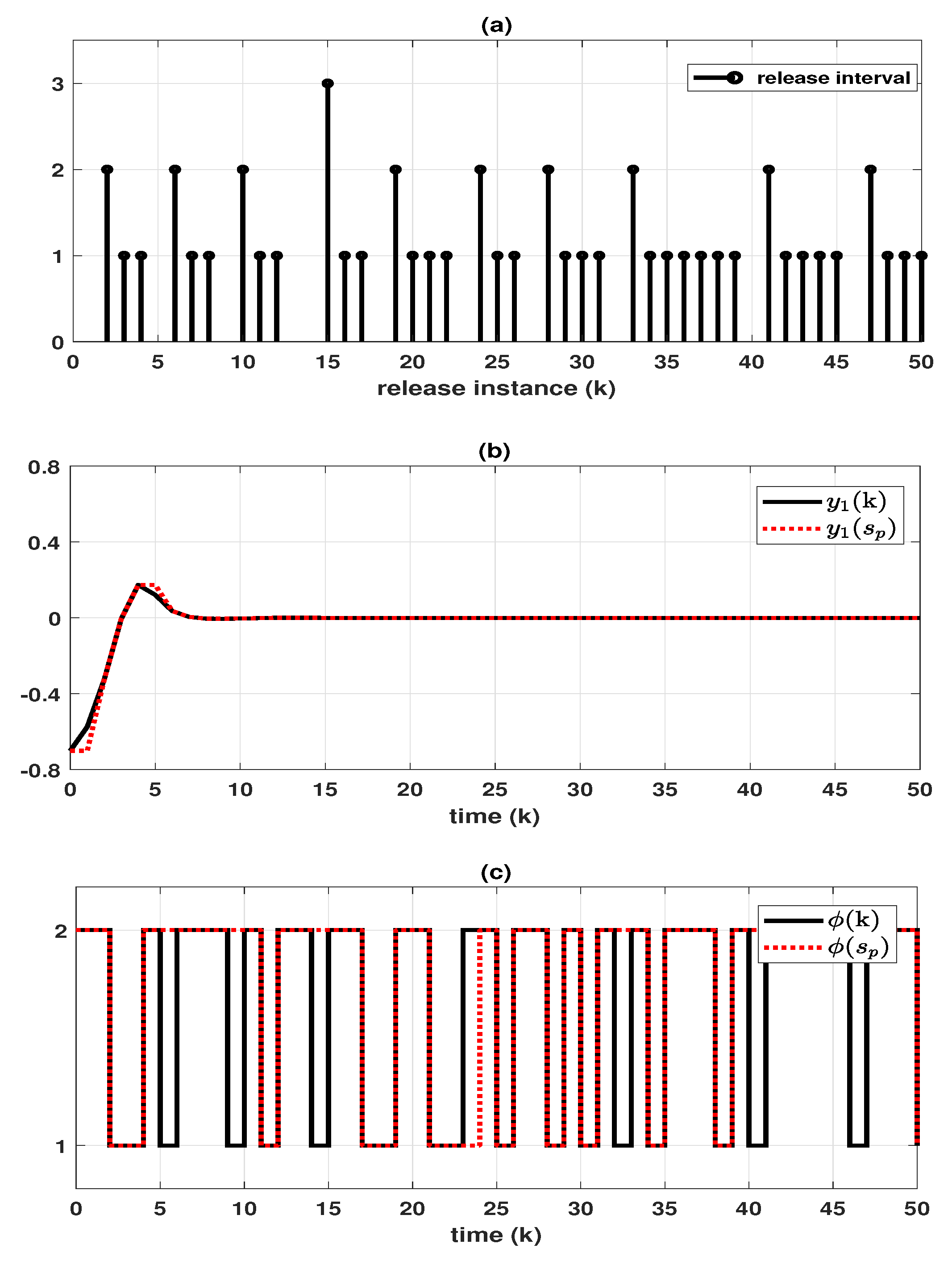
According to the event-triggered scheme,
Figure 2a shows the instance when the event generator outputs an ENT signal to the transmitter, then the measured output signal
and evolution of system mode
are transmitted to the filter, which are displayed in
Figure 2b and
Figure 2c, respectively. Especially, since matched error
, FBF module constructs the event-triggered fuzzy basis functions
from the measured output
. Based on the obtained non-PDC fuzzy filter gains,
Figure 3a,b show the response of
,
, and
for
,
; and
Figure 3c,d show the response of
,
, and
for
,
, and
(elsewhere). As a result, from
Figure 3b, it can be found that the filtering errors converge to zero as time increases, and from
Figure 3d, it can be verified that the dissipativity performance
in
Table 2 holds because
is satisfied.
Example 2 (for
and
).
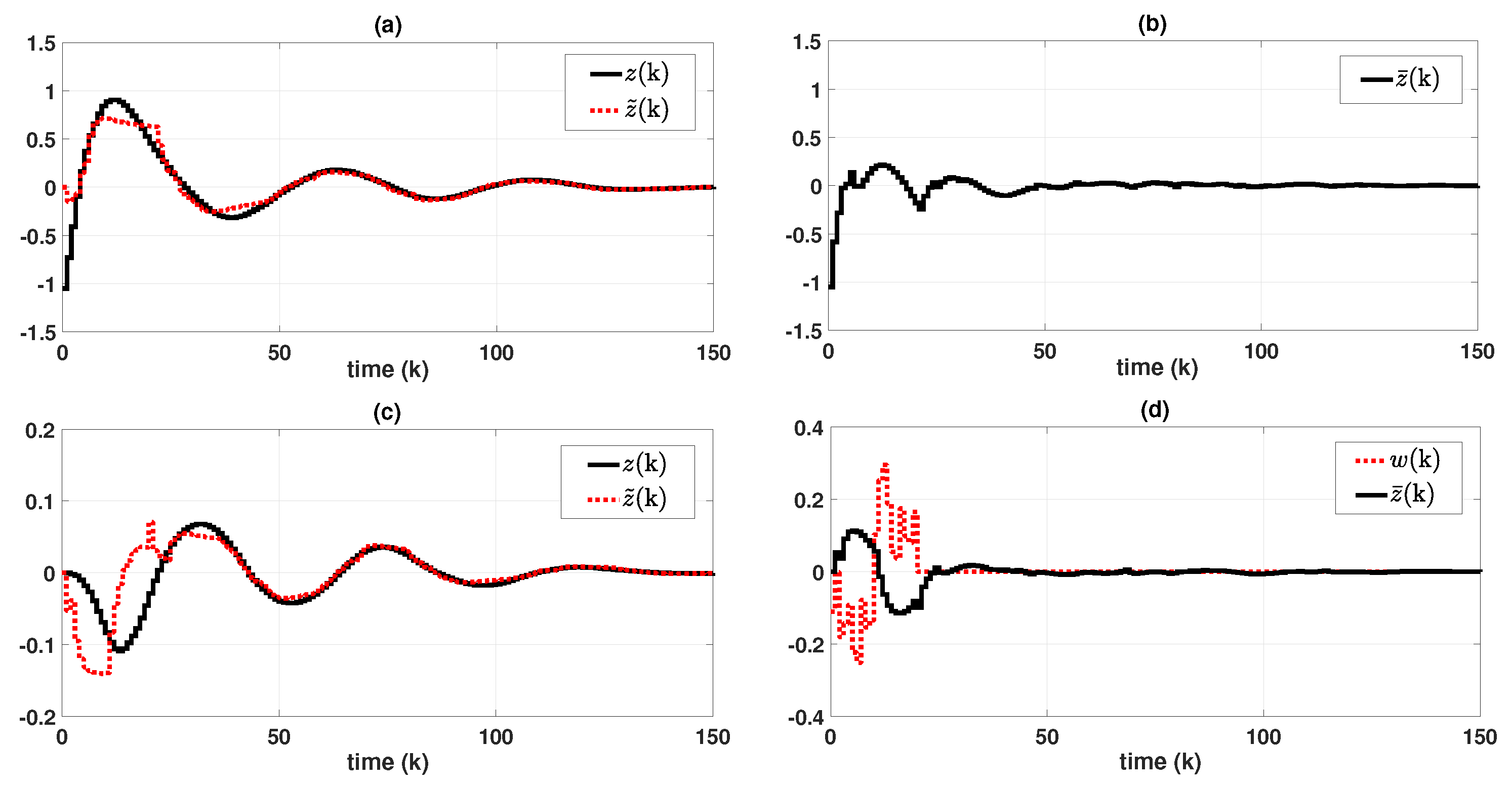
Let us consider a tunnel diode circuit system expressed as FMJS with , adopted in [34]:where the fuzzy basis functions are given asIn addition, the transition rates are given as follows:which means that , , , and . Furthermore, to obtain the simulation results for both synchronous and asynchronous cases, the conditional probabilities are established as follows: For
and
,
Table 3 shows the maximum dissipativity performance level
for several
, obtained by Theorem 1, where
,
,
. From
Table 3, it can be found that (1) the dissipativity performance deteriorates as the mismatch threshold
increase, (2) the synchronous case offers better performance than the asynchronous case.
Meanwhile, for Case 2 and
, Theorem 1 offers the following solution:
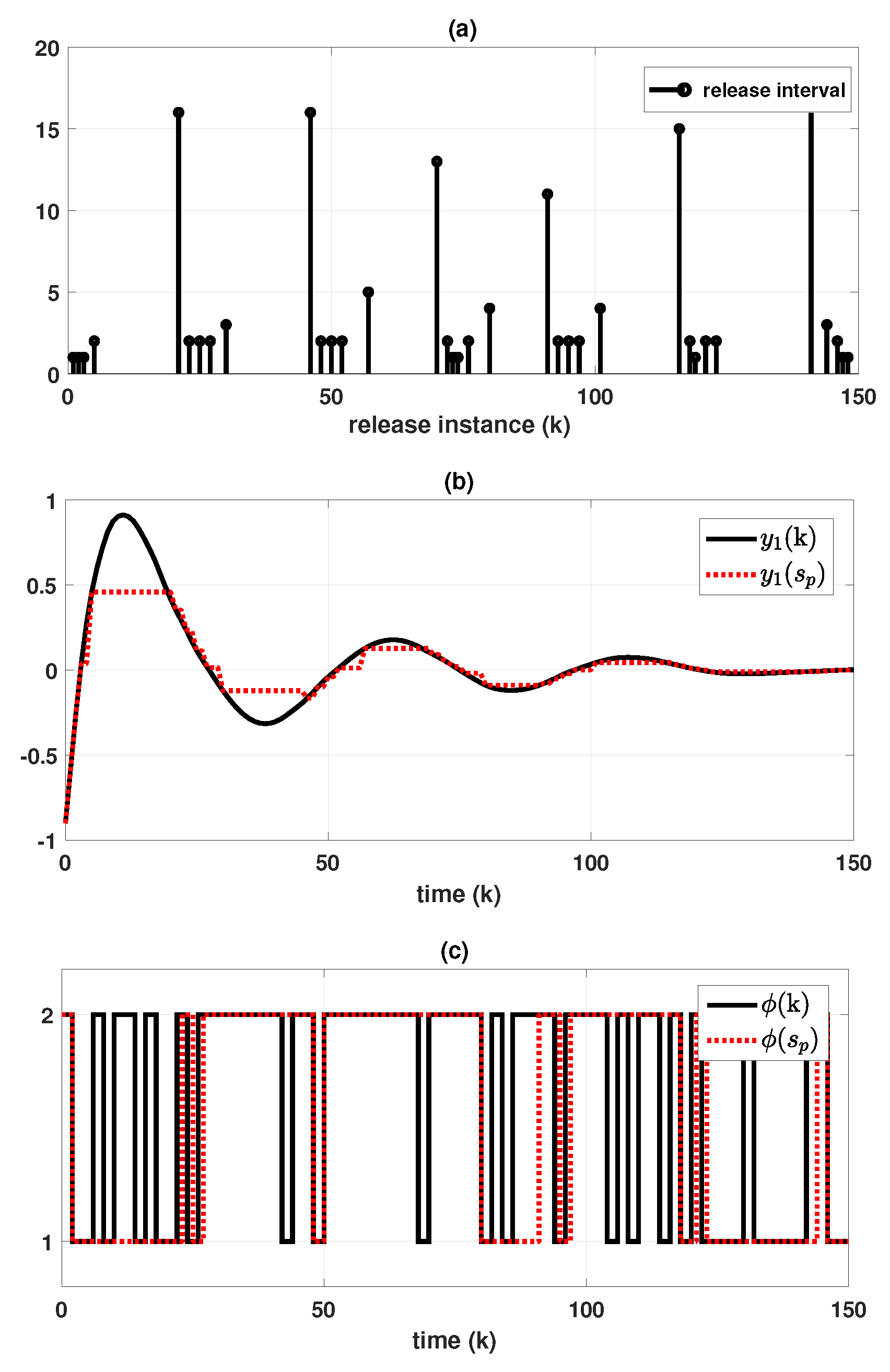
According to the event-triggered scheme,
Figure 4a shows the instance when the event generator outputs an ENT signal to the transmitter, then the measured output signal
and evolution of system mode
are transmitted to the filter, which are displayed in
Figure 4b and
Figure 4c, respectively. From the transmitted output
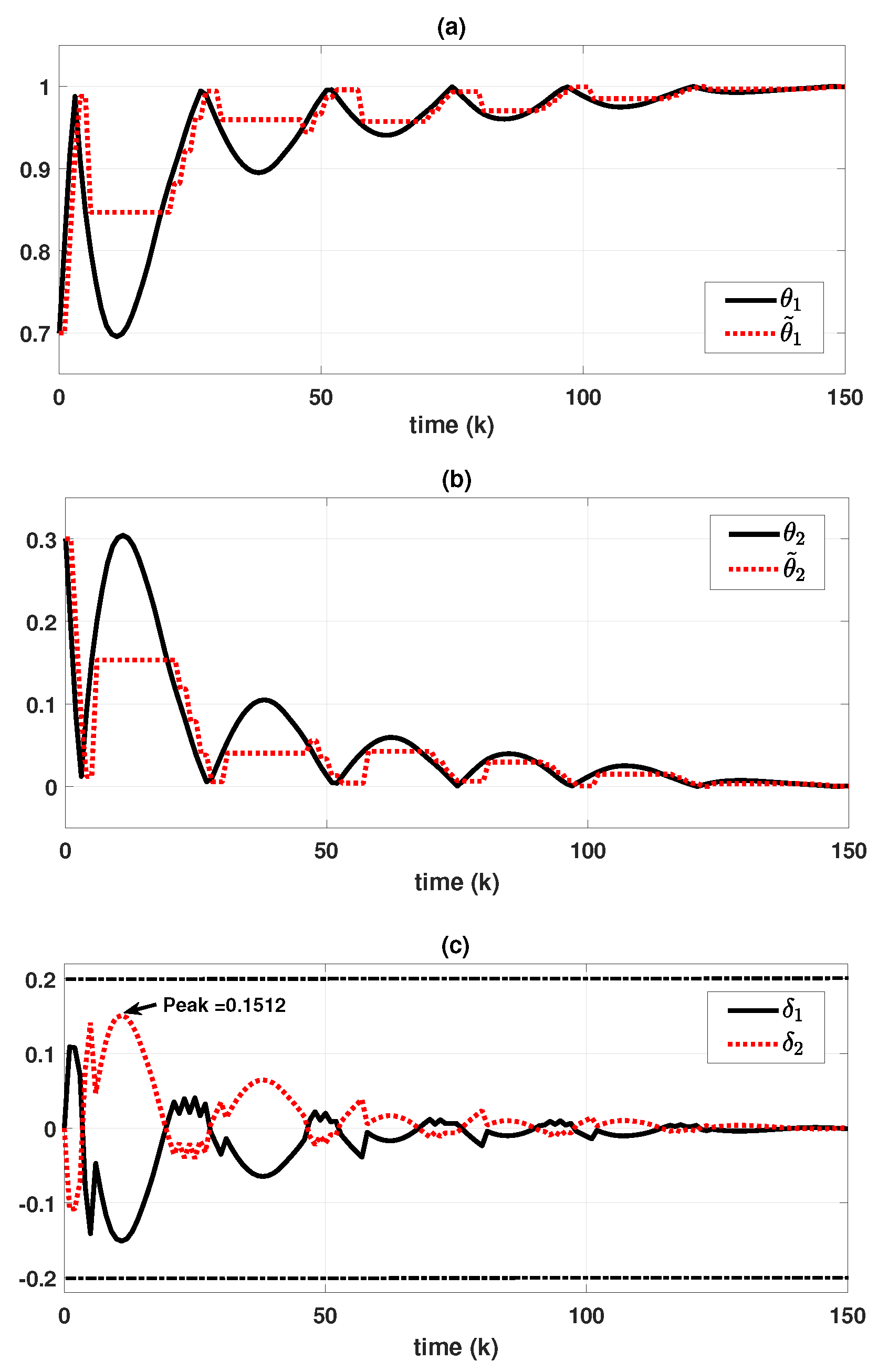
, FBF module constructs the event-triggered fuzzy basis functions
, which are shown in
Figure 5a,b, and the dynamic behavior of
are presented in
Figure 5c. Based on the obtained non-PDC fuzzy filter gains,
Figure 6a,b show the response of
,
, and
for
,
; and
Figure 6c,d show the response of
,
, and
for zero initial
,
,
, and
(elsewhere). As a result, from
Figure 6b, it can be found that the filtering errors converge to zero as time increases, and from
Figure 6d, it can be seen that the dissipativity performance
in
Table 3 holds because
is satisfied. Not only that, it can be verified from
Figure 5c that
satisfies
, for
.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}