
A Provable Secure Session Key Distribution Protocol Based on NSSK for In-Vehicle CAN Network †


Abstract
:1. Introduction
1.1. Related Works
1.2. Our Goal and Contribution
- (1)
- We summarize the related cryptographic protocols and applications of in-vehicle CAN and analysis the disadvantages in their key distribution or update protocols. To prevent the risk of group-key-based schemes being compromised by exploiting vulnerabilities for launching impersonation attacks, we adopt the tactic of centralized node-based schemes and propose a new secure centralized node-based key distribution protocol that is based on the NSSK (Needham–Schroeder shared key) distribution protocol.
- (2)
- To fix the defect of the original NSSK distribution protocol on resisting the Denning–Sacco attack, we adopt the message authentication and signature verification mechanism on NSSK against the invalid replayed encrypting message attack. Considering the application in the actual communication scenarios of the automotive CAN, we split the key distribution protocol into two-stage protocols, namely, the initial SKDP (initial session key distribution protocol) and second SKDP (second session key distribution protocol). We prove the security and robustness of the initial SKDP and second SKDP by formally analyzing with the ROM (random oracle model) and verifying the security goals in the simulation tool AVISPA and Tamarin Prover. The results showed that the proposed protocol is safe and fits the security demand of session key secrecy and known key secrecy.
- (3)
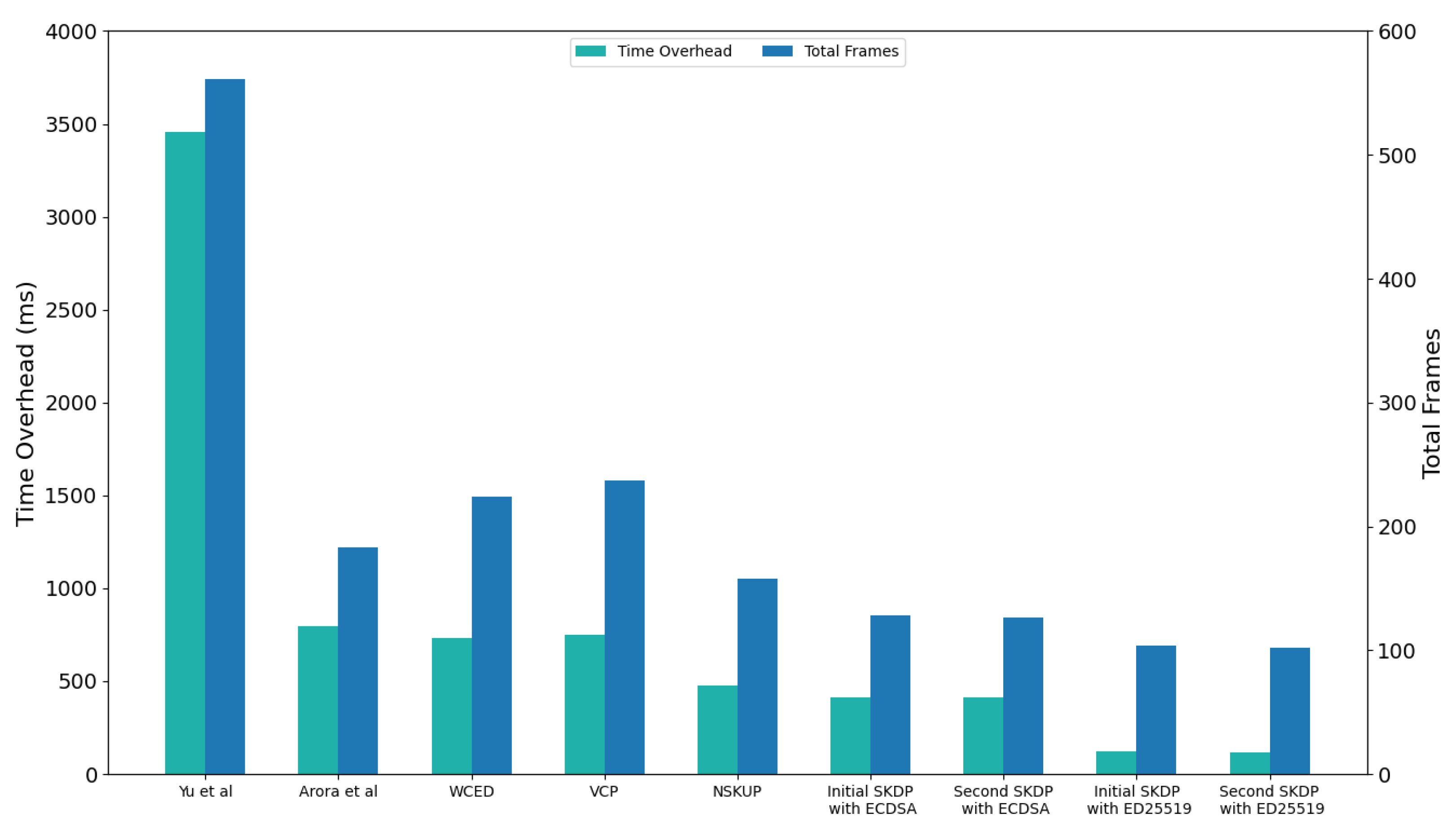
- We evaluated the performance of our proposed protocol on a CAN prototype test suite. We compared our proposed protocol with the other session key distribution on the computation time complexity and the number of storage message bits. The evaluation result showed that our proposed protocol has a competitive performance on both the computation time and storage cost. We measured the actual execution time and data frame number of the protocols. Moreover, we found these observed indicators of our proposed protocol dropped by 70% and 23% when we replaced the ECDSA with a lightweight signature algorithm ED25519, which showed the fitness of our new protocol on the real-time demand of the resource-constrained ECUs.
2. Preliminaries
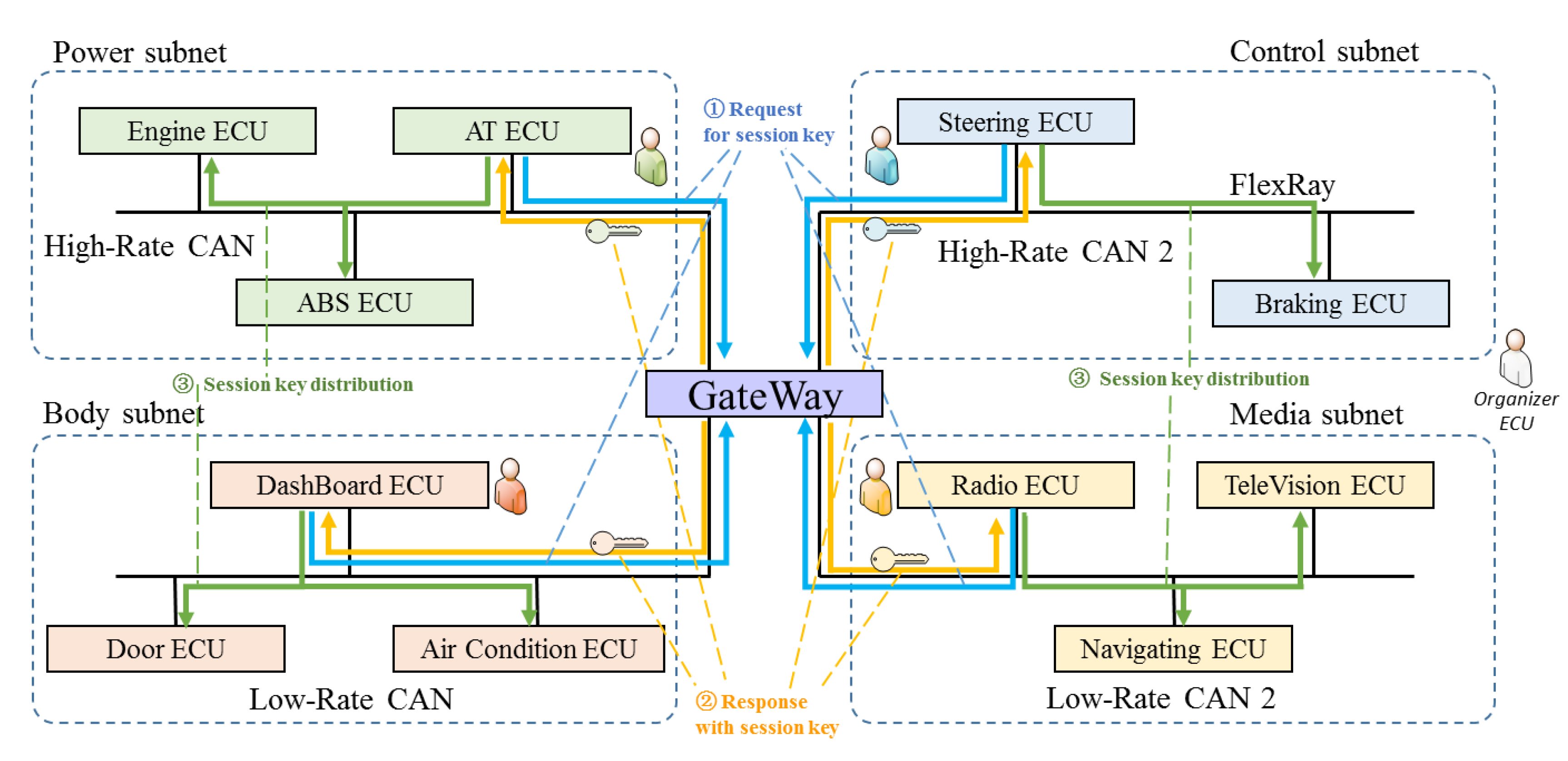
2.1. System Architecture
2.2. Session Key Sharing Approaches
- (1)
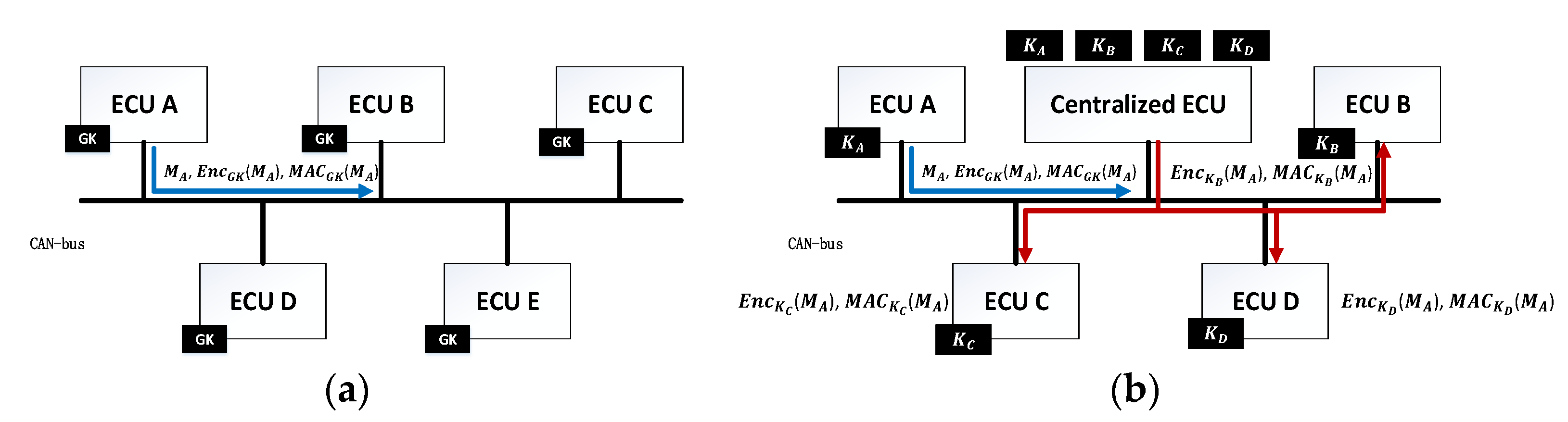
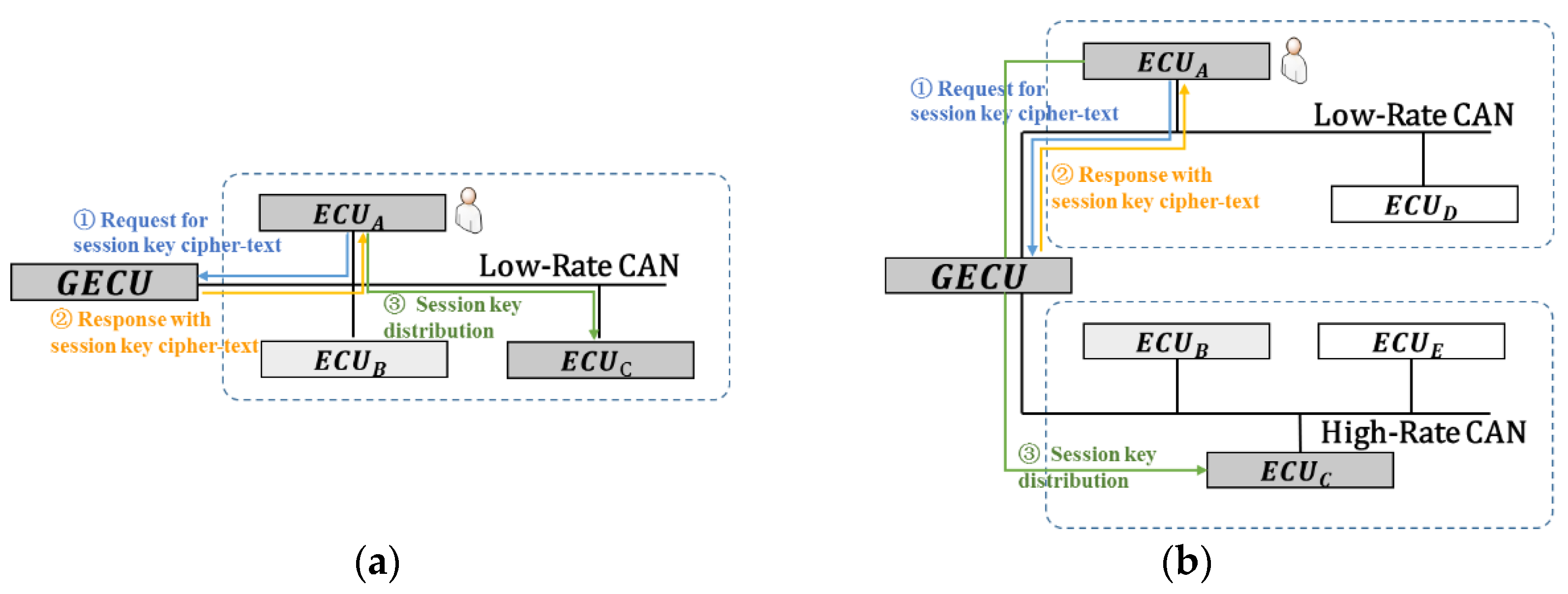
- Group-key-based approach [1,2,3,4,5,6,7,8,9]: All ECUs in the CAN bus network share one key to authenticate or encrypt CAN packet in automotive CAN. Figure 2a shows the group-key-based approach’s network topological structure. Due to all ECUs sharing the same key, the sender ECU only sends a CAN message once. All ECUs in the network can receive the message and verify or decrypt the message data. Although the group-key-based approach is convenient, it cannot, however, completely resist the impersonation attack initiated by an advanced adversary. The group sharing key for message encryption and authentication may have a risk of being compromised by an advanced adversary to penetrate the ECU. Although each group sharing key is usually only bound to one group, some cases may exist where an ECU is located in two different domains at the same time. Thus, the connection points between different groups are more likely to be exploited to launch attacks by advanced adversaries.
- (2)
- Centralized node-based approach: some works [11,12,13,14] applied a centralized node-based approach for key sharing. In this approach, each ECU establishes its secret key with a centralized ECU to defend against masquerade attacks launched by compromised ECUs. The centralized ECU is responsible for message authentication and encryption. Figure 2b shows the network topological structure of the centralized node-based approach and message data flows. In general, each ECU shares a distinct key with the central ECU. Each sender ECU encrypts its CAN packets or generates MACs by using the shared key with the central ECU. The central ECU uses its sender ECU’s shared key to decrypt the CAN packets and verify the MACs. Finally, the centralized ECU informs other ECUs about the verification results, which are encrypted by different receiver ECUs’ shared keys. These studies mostly employed the hash-chain-based authentication method.
2.3. Attack Surfaces of Automotive CAN
- (1)
- Physical attack surfaces: Modern vehicles have many exposed physical or hardware access interfaces such as the OBD or USB port, which can be used for ECU status of diagnosis and firmware updates. Attackers may access these interfaces to compromise ECUs. For example, Checkoway et al. [24] plugged an OBD-II dongle device into the automotive CAN to find vulnerabilities. They demonstrated the OBD-II dongle device could be easily exploited by attackers within the same network due to a lack of access control. The adversary can easily install a malicious program on the device to compromise the ECU via firmware updates. In addition, they found the vehicle’s audio system updated automatically by re-flashing the firmware at a specific USB drive file path. They demonstrated that an adversary can exploit the defect of the target audio system to plant a modified firmware or an executable file that can transmit malicious packets.
- (2)
- Wireless attack surfaces: Physical-based attacks on the vehicle need physical access to penetrate the in-vehicle network. However, some physical access points to a vehicle may be removed before leaving the factory. Therefore, the wireless access attack is proposed to overcome the limitations of physical access requirements. The adversary can transmit malicious CAN packets remotely through wireless channels between the adversary and telematics devices. Checkoway et al. demonstrated that some telematics devices equipped with Bluetooth may more likely offer remote access to the CAN bus. They reverse-engineered the target vehicle’s Bluetooth protocol stack and found the vulnerability that the program did not check the input size of allocated memory. They launched a buffer overflow attack on a Bluetooth pairwise device, then they proved that the penetrated device can execute malicious code on the target telematics device by sending arbitrary packets remotely [24]. Miller et al. found remote access vulnerabilities in Jeep’s Uconnect system. They manipulated a femtocell device to establish the wireless access channel to the Uconnect device and sent arbitrary packets remotely to the CAN bus network [25].
2.4. Adversary and Attack Types
- (1)
- Common adversary: They attempt to launch an attack on automotive CAN through the OBD port. They can exploit the vulnerabilities of OBD-based services to access safety-critical ECUs and cause a CAN bus network hazard by injecting many CAN packet into the vehicle.
- (2)
- Advanced adversary: They can compromise ECUs through vulnerable physical or wireless access points. They can exploit the vulnerabilities of remote opening ports of external networks and physical access ports to gain access to compromise the ECUs. By injecting malicious packets to the CAN bus network through these attack surfaces, they can control the safety-critical ECUs or cause a network hazard without using physical OBD-based services or devices.
- (1)
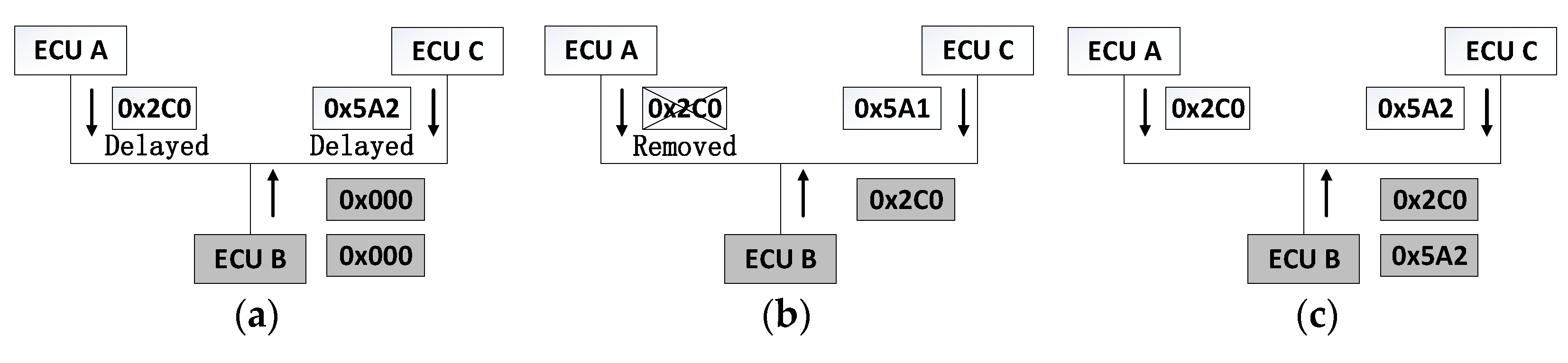
- Frequency-based attacks: The frequency-based attacks contain two major types: DoS (denial of service) and bus-off attacks. The DoS attack is shown in Figure 3a. It is initiated by a common or advanced adversary who injects the highest priority CAN packet to the automotive CAN network, such as the CAN ID of 0x00. When the network is flooded by the highest priority CAN packet, the ECUs that send the packets with lower priority will lose the arbitration of the CAN bus. The bus-off attack, which is shown in Figure 3b, exploits the defect of the CAN bus arbitration mechanism to execute the attack. A common or advanced adversary knows the regularity of the target ECU data transmission period and sends the same CAN-ID packets with bit errors simultaneously while the target ECU sends legitimate packets. The adversary causes a series of arbitration conflicts to suspend the target ECU. While the target ECU enters the bus-off state, the compromised ECU will take over the traffic with forged packets.
- (2)
- Payload-based attacks: The payload-based attacks consist of many different types such as impersonation attacks, replay attacks, and MITM (man-in-the-middle) attacks. The impersonation attack is a so-called spoofing attack that is launched by a packet payload modification adversary. The impersonation adversary changes the content of CAN packets to disturb the safe-critical ECUs’ function and judgment. Conversely, the replay attack adversary retransmits the past CAN packets without any modification to prevent the vehicle from operating properly in a normal state. The MITM attack is a combination attack of an impersonation attack and a replay attack—it will make the pair-wise ECUs think that the adversary is the real communicating entity with them and finally cause data leakage. Figure 3c shows the payload-based attacks.
- (3)
- Denning–Sacco attack: This attack is a kind of known-key attack for the Needham–Schroeder SKDS scheme [21]. After the role Alice and Bob in NSSK have executed many rounds, the Denning–Sacco adversary cracks the session key from the past transfer messages and replays an old encrypted message with a form such as to Bob, where represents the cracked session key, is the identity of Alice, and is the long-term symmetric key for Bob. Due to the lack of timestamp validation stage in NSSK, the receiver Bob will accept the replayed message from the adversary and confirm the replacement of the sharing session key between the actual role of Alice and Bob [26].
3. Proposed Scheme
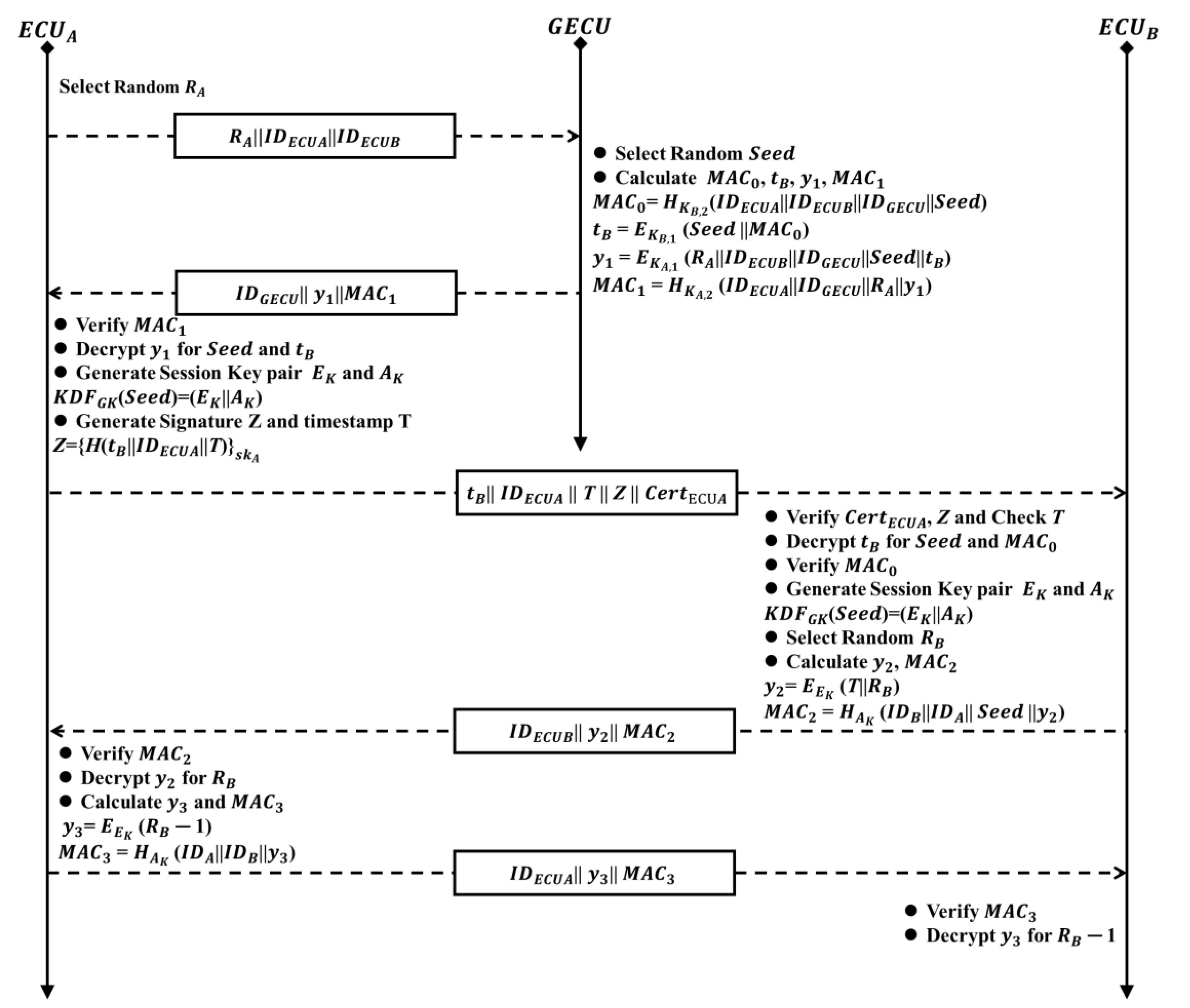
3.1. Initial Session Key Distribution Protocol
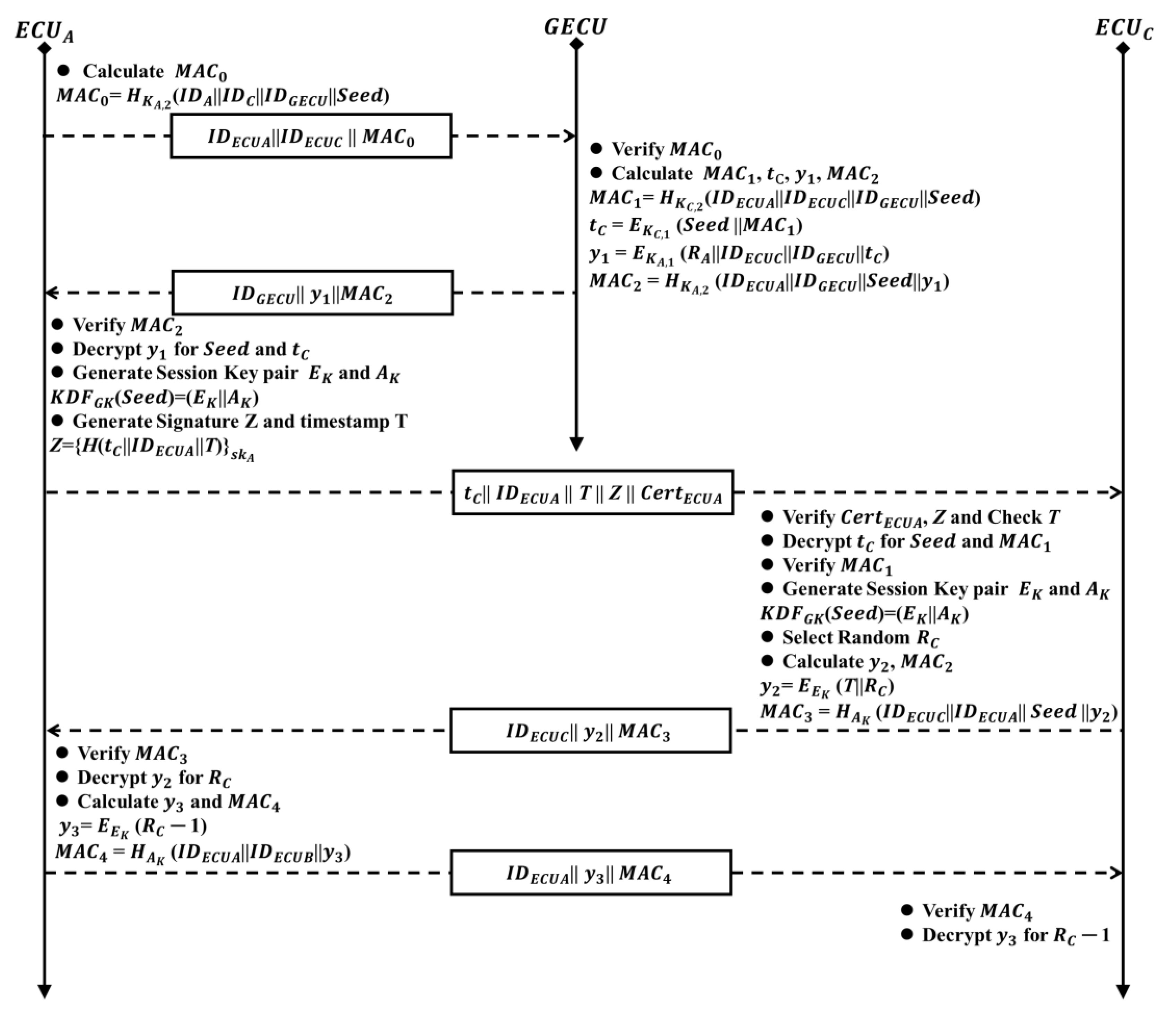
3.2. Second Session Key Distribution Protocol
4. Security Analysis
4.1. Formal Security Analysis of the Proposed Protocol
4.2. Informal Security Analysis of the Proposed Protocol
5. Security Verification
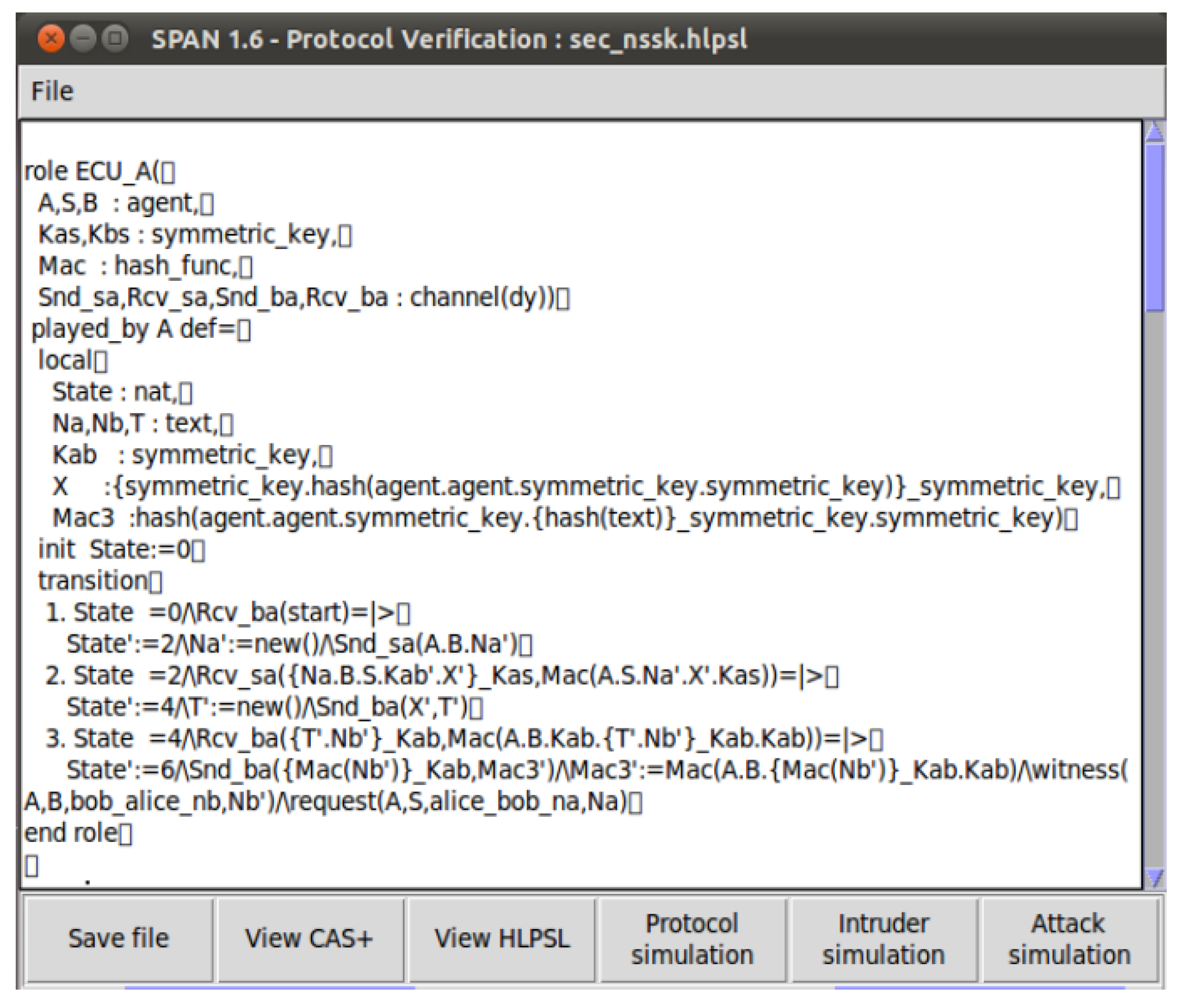
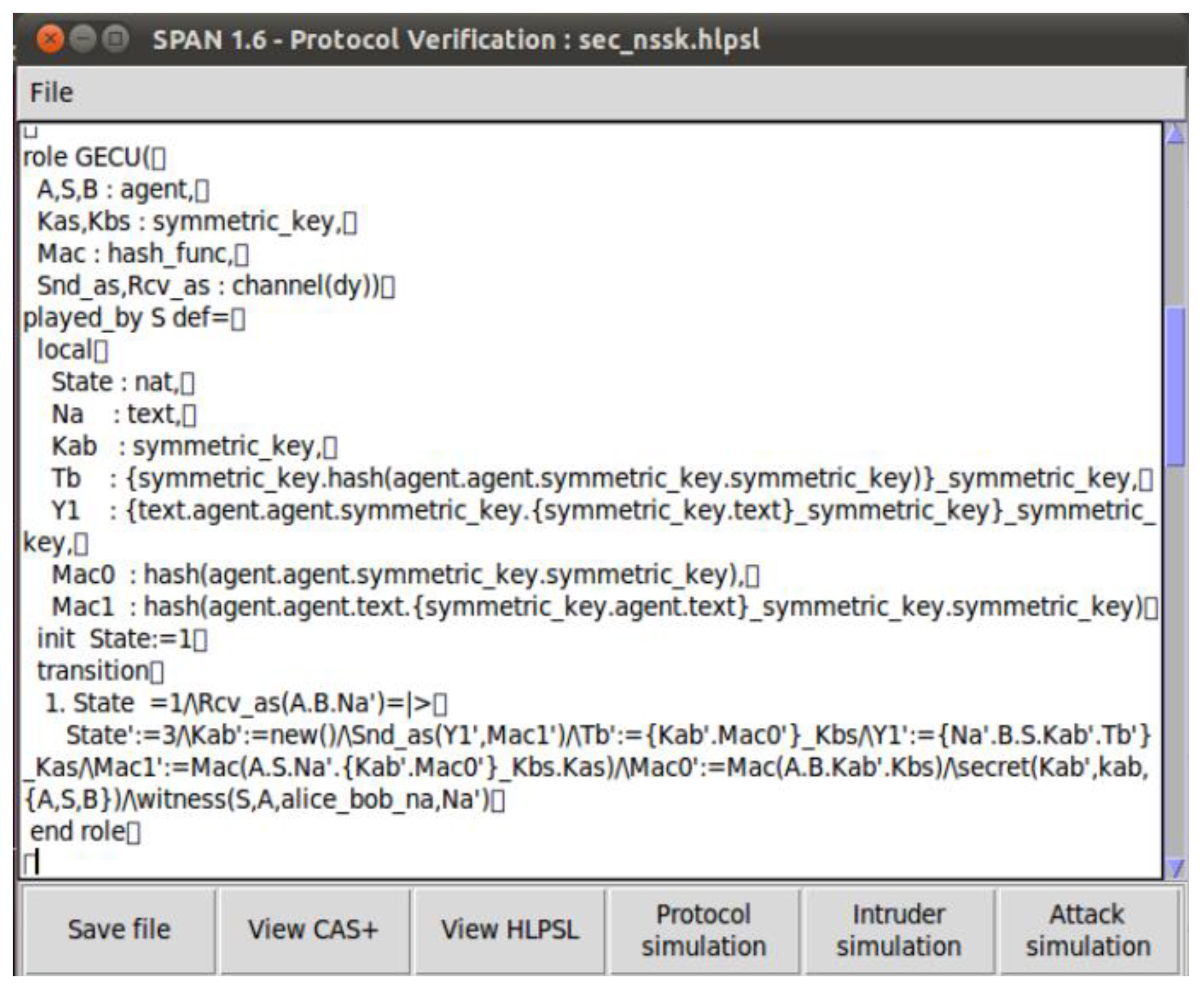
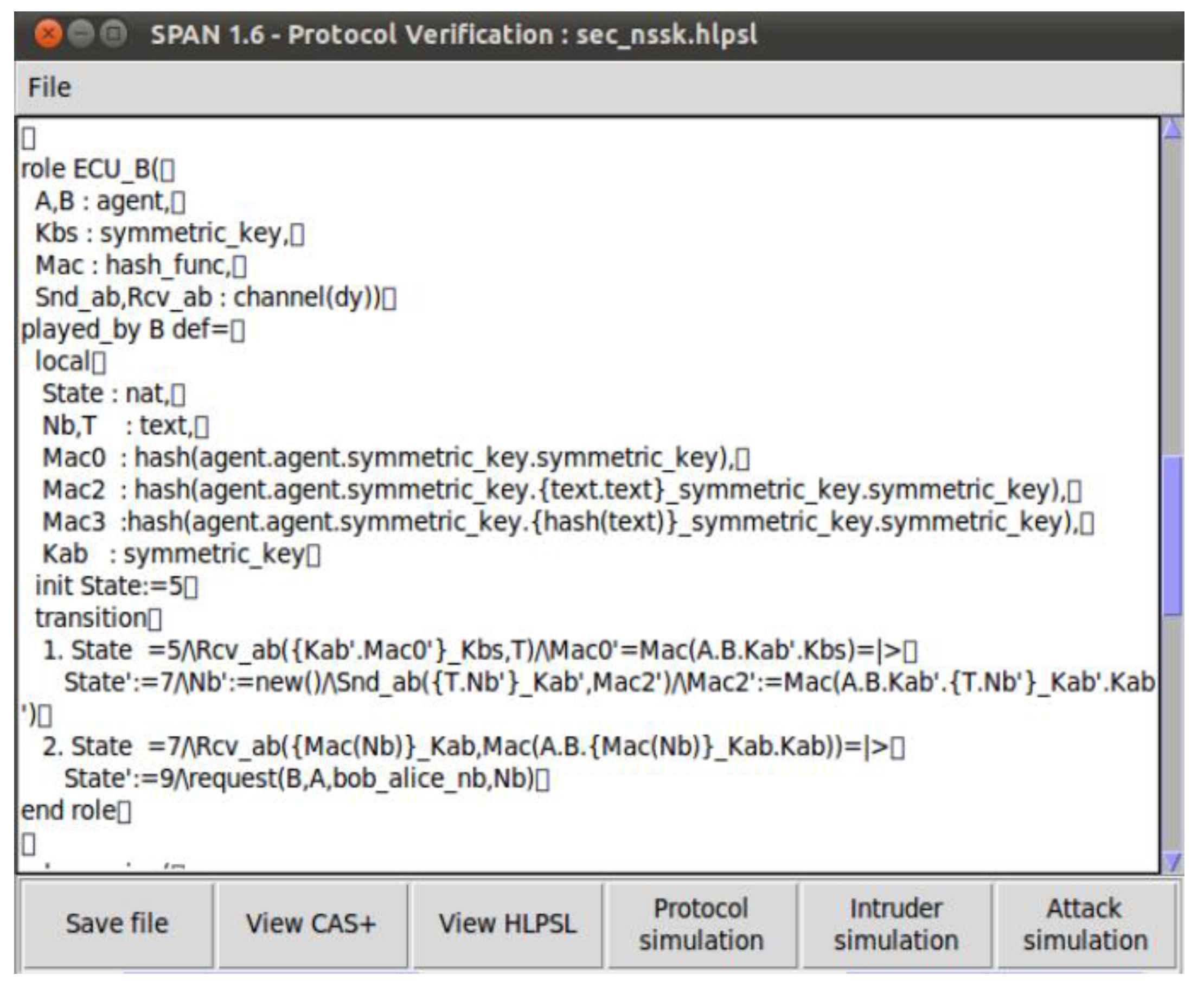
5.1. The Role of HLPSL Codes
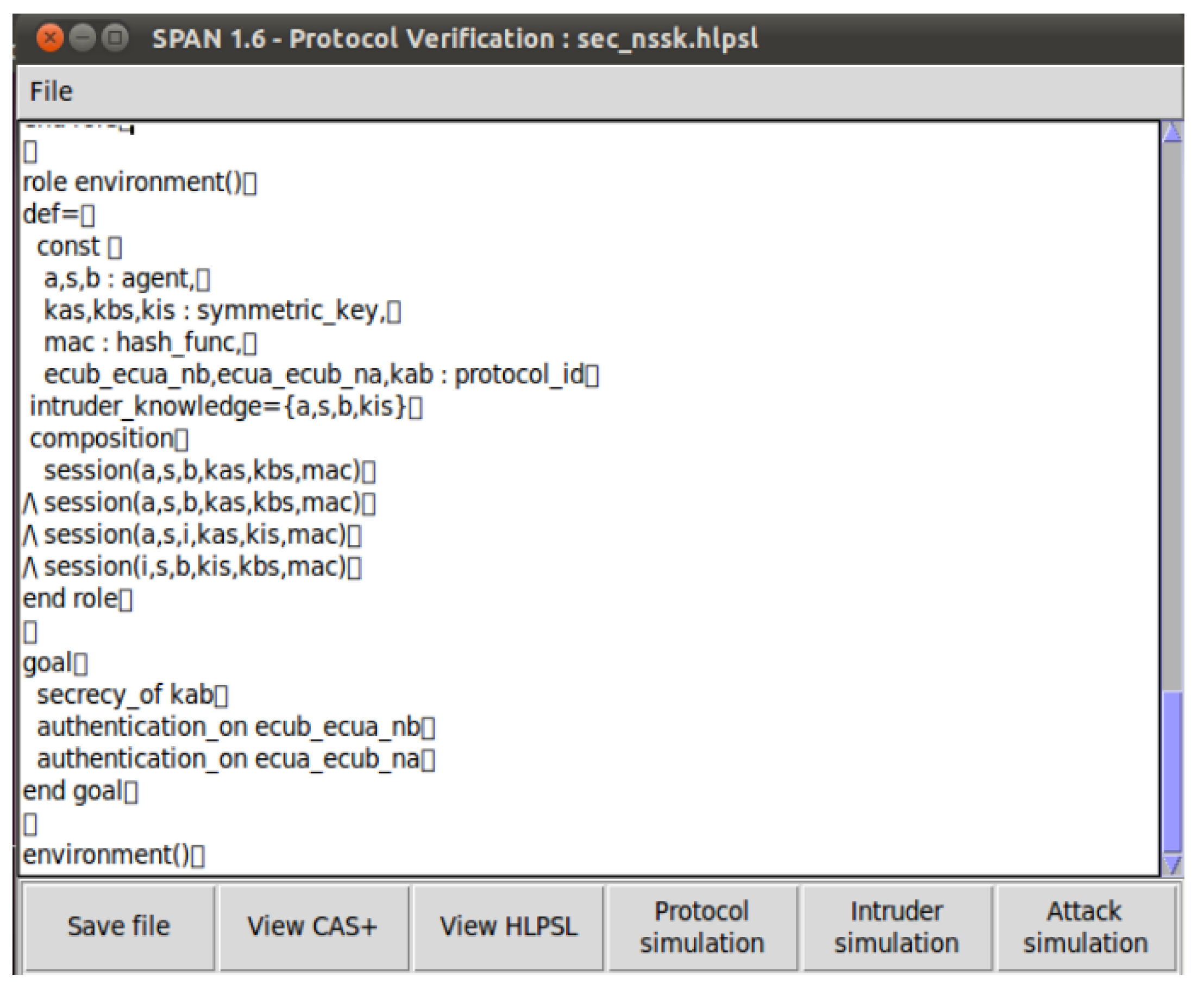
5.2. The Environment and Verification Goals
5.3. Simulation Result in AVISPA
- (1)
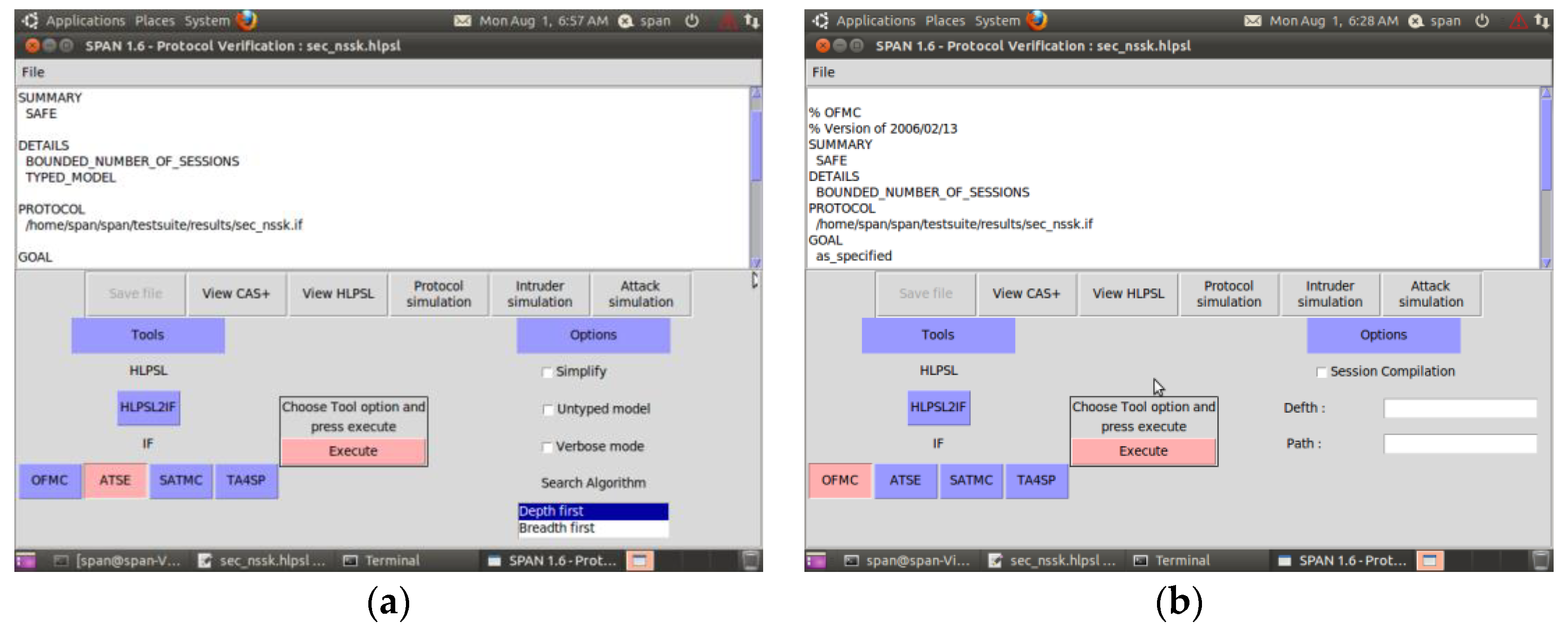
- ATSE protocol result: The simulation results of our proposed scheme based on the ATSE protocol are shown in Figure 12a, showing that our scheme is safe as it prevents the key sharing process from all kinds of common stealing session key and payload-based attacks.
- (2)
- OFMC protocol result: The simulation results of our proposed scheme on the basis of the OFMC protocol are shown in Figure 12b, which shows the safety of our proposed scheme and it is efficiency in resisting all kinds of the common stealing session key and payload-based attacks.
5.4. Simulation Result in Tamarin Prover
6. Performance
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Woo, S.; Jo, H.J.; Kim, I.S.; Lee, D.H. A practical security architecture for in-vehicle CAN-FD. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2248–2261. [Google Scholar] [CrossRef]
- Wang, Q.; Sawhney, S. VeCure: A practical security framework to protect the CAN bus of vehicles. In Proceedings of the 2014 International Conference on the Internet of Things (IoT), Cambridge, MA, USA, 6–8 October 2014; pp. 13–18. [Google Scholar]
- Nürnberger, S.; Rossow, C. vatiCAN–vetted, authenticated CAN bus. In Proceedings of the International Conference on Cryptographic Hardware and Embedded Systems, Santa Barbara, CA, USA, 17–19 August 2016; pp. 106–124. [Google Scholar]
- Radu, A.I.; Garcia, F.D. LeiA: A lightweight authentication protocol for CAN. In Proceedings of the European Symposium on Research in Computer Security, Heraklion, Greece, 28–30 September 2016; pp. 283–300. [Google Scholar]
- Kang, K.D.; Baek, Y.; Lee, S.; Son, S.H. An Attack-Resilient Source Authentication Protocol in Controller Area Network. In Proceedings of the 2017 ACM/IEEE Symposium on Architectures for Networking and Communications Systems (ANCS), Beijing, China, 18–19 May 2017; pp. 109–118. [Google Scholar]
- Bella, G.; Biondi, P.; Costantino, G.; Matteucci, I. TOUCAN: A protocol to secure controller area network. In Proceedings of the ACM Workshop on Automotive Cybersecurity, Richardson, TX, USA, 27 March 2019; pp. 3–8. [Google Scholar]
- Mun, H.; Han, K.; Lee, D.H. Ensuring safety and security in CAN-based automotive embedded systems: A combination of design optimization and secure communication. IEEE Trans. Veh. Technol. 2020, 69, 7078–7091. [Google Scholar] [CrossRef]
- Youn, T.-Y.; Lee, Y.; Woo, S. Practical Sender Authentication Scheme for In-Vehicle CAN with Efficient Key Management. IEEE Access 2020, 8, 86836–86849. [Google Scholar] [CrossRef]
- Palaniswamy, B.; Camtepe, S.; Foo, E.; Pieprzyk, J. An efficient authentication scheme for intra-vehicular controller area network. IEEE Trans. Inf. Forensics Secur. 2020, 15, 3107–3122. [Google Scholar] [CrossRef]
- Schmandt, J.; Sherman, A.T.; Banerjee, N. Mini-MAC: Raising the bar for vehicular security with a lightweight message authentication protocol. Veh. Commun. 2017, 9, 188–196. [Google Scholar] [CrossRef]
- Groza, B.; Murvay, S. Efficient protocols for secure broadcast in controller area networks. IEEE Trans. Ind. Inform. 2013, 9, 2034–2042. [Google Scholar] [CrossRef]
- Kurachi, R.; Matsubara, Y.; Takada, H.; Adachi, N.; Miyashita, Y.; Horihata, S. CaCAN-centralized authentication system in CAN(controller area network). In Proceedings of the 14th International Conference on Embedded Security in Cars (ESCAR 2014), Hamburg, Germany, 19 November 2014; pp. 1–9. [Google Scholar]
- Wang, E.; Xu, W.; Sastry, S.; Liu, S.; Zeng, K. Hardware module-based message authentication in intra-vehicle networks. In Proceedings of the 2017 ACM/IEEE 8th International Conference on Cyber-Physical Systems (ICCPS), Pittsburgh, PA, USA, 18–20 April 2017; pp. 207–216. [Google Scholar]
- Jo, H.J.; Kim, J.H.; Choi, H.-Y.; Choi, W.; Lee, D.H.; Lee, I. Mauth-can: Masquerade-attack-proof authentication for in-vehicle networks. IEEE Trans. Veh. Technol. 2020, 69, 2204–2218. [Google Scholar] [CrossRef]
- Wu, Z.; Zhao, J.; Zhu, Y.; Lu, K.; Shi, F. Research on in-vehicle key management system under upcoming vehicle network architecture. Electronics 2019, 8, 1026. [Google Scholar] [CrossRef]
- Püllen, D.; Anagnostopoulos, N.A.; Arul, T.; Katzenbeisser, S. Using implicit certification to efficiently establish authenticated group keys for in-vehicle networks. In Proceedings of the 2019 IEEE Vehicular Networking Conference (VNC), Los Angeles, CA, USA, 4–6 December 2019; pp. 1–8. [Google Scholar]
- Pan, Q.; Tan, J. A dynamic key generation scheme based on CAN bus. In Proceedings of the 2019 10th International Conference on Information Technology in Medicine and Education (ITME), Qingdao, China, 23–25 August 2019; pp. 564–569. [Google Scholar]
- Jain, S.; Guajardo, J. Physical layer group key agreement for automotive controller area networks. In Proceedings of the International Conference on Cryptographic Hardware and Embedded Systems, Santa Barbara, CA, USA, 17–19 August 2016; pp. 85–105. [Google Scholar]
- King, Z. Investigating and securing communications in the Controller Area Network (CAN). In Proceedings of the 2017 International Conference on Computing, Networking and Communications (ICNC), Silicon Valley, CA, USA, 26–29 January 2017; pp. 814–818. [Google Scholar]
- Fassak, S.; Idrissi, Y.E.H.E.; Zahid, N.; Jedra, M. A secure protocol for session keys establishment between ECUs in the CAN bus. In Proceedings of the International Conference on Wireless Networks and Mobile Communications (WINCOM), Rabat, Morocco, 1–4 November 2017; pp. 37–42. [Google Scholar]
- Needham, R.M.; Schroeder, M.D. Using encryption for authentication in large networks of computers. Commun. ACM 1978, 21, 993–999. [Google Scholar] [CrossRef]
- Jin-Gang, Y.; Zhi-Gang, Z. An improved NSSK authentication protocol and its formal analysis. In Proceedings of the 2017 10th International Conference on Intelligent Computation Technology and Automation (ICICTA), Changsha, China, 9–10 October 2017; pp. 132–136. [Google Scholar]
- Arora, S.; Hussain, M. Secure session key sharing using symmetric key cryptography. In Proceedings of the 2018 International Conference on Advances in Computing, Communications and Informatics (ICACCI), South Campus, Bangalore, 19–22 September 2018; pp. 850–855. [Google Scholar]
- Checkoway, S.; Mccoy, D.; Anderson, D.; Kantor, B.; Kohno, T. Comprehensive Experimental Analyses of Automotive Attack Surfaces. In Proceedings of the 20th USENIX Security Symposium (USENIX Security 11), San Francisco, CA, USA, 8–12 August 2011; pp. 447–462. [Google Scholar]
- Miller, C.; Valasek, C. A Survey of Remote Automotive Attack Surfaces; Black Hat: Isanti, MN, USA, 2014; p. 94. [Google Scholar]
- Long, Y.; Xu, J.; Wang, C.; Wang, Z. An Improved Needham-Schroeder Session Key Distribution Protocol for In-Vehicle CAN Network. In Proceedings of the International Conference on Security and Privacy in New Computing Environments, Xi’an, China, 27–28 November 2022; pp. 35–52. [Google Scholar]
- Bernstein, D.J.; Duif, N.; Lange, T.; Schwabe, P.; Yang, B.Y. High-speed high-security signatures. J. Cryptogr. Eng. 2012, 2, 77–89. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scheme | Research Work | Key Usage | Key Distribution Approach | Resistance to Attacks |
|---|---|---|---|---|
| Group-key-based | Wang et al. [2] Nürnberger et al. [3] Bella et al. [6] Mun et al. [7] Schmandt et al. [10] | Message authentication | No fixed or pre-assigned keys | Impersonation and replay attacks |
| Woo et al. [1] Palaniswamy et al. [9] | Message authentication and encryption | Based on AKEP2 and asymmetric DH protocol | Impersonation, replay, and MITM attacks | |
| Kang et al. [5] Youn et al. [8] | Message authentication | Based on AKEP2 | Impersonation and replay attacks | |
| Wu et al. [15] | Message authentication and encryption | Based on asymmetric encryption | Impersonation, replay, and MITM attacks | |
| Püllen et al. [16] Pan et al. [17] | Encryption | Based on ECDH | Impersonation, replay, and MITM attacks | |
| Centralized node-based | Groza et al. [11] Kurachi et al. [12] Wang et al. [13] Jo et al. [14] | Message authentication | Based on hash-chain | Impersonation and replay attacks |
| Two parties | Fassak et al. [20] | Message authentication | Based on ECC-AKE | Impersonation, replay, and MITM attacks |
| Three parties | Needham et al. [21] | Encryption | Based on symmetric encryption | Impersonation attack |
| Yu et al. [22] | Encryption | Based on symmetric and asymmetric encryption | Impersonation, replay, MITM, and Denning–Sacco attacks | |
| Arora et al. [23] | Encryption | Based on symmetric encryption with cyclic group multiplication | Impersonation, replay, MITM, and Denning–Sacco attacks | |
| Centralized node-based | This work | Message authentication and encryption | Based on symmetric encryption and signature verification | Impersonation, replay, MITM, and Denning–Sacco attacks |
| Notation | Description |
|---|---|
| ith electronic control unit | |
| , i = A, B, C, … | |
| GECU | Gateway ECU |
| A seed value of the session | |
| Encryption key of the session | |
| Authentication key of the session | |
| The root key for session key derivation | |
| Long-term is authentication key | |
| Keyed one-way function used for key derivation | |
| (.) | Keyed-hash message authentication code (HMAC) |
| (.) | Symmetric encryption/decryption function |
| Signature-generating function, where sk is the private key |
| Query Operation | Description |
|---|---|
| A hash query initiated by an adversary for the correlate plain text M or the ciphertext C. If the correlate record has been already stored in the form of (M, f) or (C, g), the oracle will return the stored hash record f or g; otherwise, it returns a new random number f’ or g’ to the adversary and stores (M, f’) and (C, g’) in the oracle’s hash table [26]. | |
| A signature query initiated by an adversary for the correlate plain text M; the oracle uses the signature table S to store plain text M and signature S pair in the form of (M, S). The working mechanism of is similar to . | |
| A ciphertext query initiated by an adversary for the correlate plain text M; the oracle uses the ciphertext table E to store plain text M and cipher text C pair in the form of (M, C). The working mechanism of is similar to . | |
| The query imitates the message sent by the adversary. | |
| The query imitates passive attacks such as spoofing or replaying the eavesdropped message. | |
| The query imitates acquiring the session keys of the parties. | |
| The query imitates acquiring the secret internal variables of the parties. | |
| The query imitates acquiring the long-term key of the parties. | |
| The adversary initiates the query in the final game. The queried party tosses a bit-value b of 0 or 1. If b = 1, it returns the real session key; otherwise, it returns a random number. The query succeeds only if an adversary can guess the b’s value correctly in every game [26]. |
| The Lemmas of Initial SKDP |
| lemma Executability: exists-trace “Ex ECUA ECUB RB EK AK #i #j #k. Commit_strongB(Ri)@#i & Commit_strongA (Ri)@#j & #j<#i & Running_strongA(Ri) @#j & Running_strongB(Ri)@#k & #k<#j & not(Ex #r1. Reveal(ECUA)@#r1) & not(Ex #r2. Reveal(ECUB)@#r2)” lemma SessionKey_secrecy: “not(Ex ECUA ECUB EK AK #i. Secret(ECUA,ECUB,EK,AK)@#i & (Ex#r. K(<EK,AK>)#j)& not(Ex #j. Reveal(ECUA) @ #j & not(Ex #j. Reveal(ECUB) @ #j)” lemma Injectiveagreement_ECUA: “(All Ri #i. Commit_strongA(Ri)@ #i ==> (Ex #j. Running_strongA(Ri) @ #j & #j < #i) & (not (Ex #j. Commit_strongA(Ri) @ #j & not (#i = #j))))” lemma ECUA_KKS: all-traces “All ECUA EK AK #i #m #n. Secret(ECUA,EK,AK) @ i & Honest(ECUA)@ m &Sesreveal(ECUA) @ n & #i<#n ==> not(Ex EK AK #r.K(<EK,AK>)@r)” |
| Executable | Injective Agreement | Session Key Secrecy | Known Key Secrecy | |
|---|---|---|---|---|
| Initial SKDP | Yes | Yes | Yes | Yes |
| Second SKDP | Yes | Yes | Yes | Yes |
| Notation | Description | Computation Time (ms) |
|---|---|---|
| The time to perform an HMAC or hash operation in SHA-256 | 1.21 | |
| The time for symmetric encryption or decryption operation in AES-256 | 0.35 | |
| The time to sign the message in ECDSA-256 | 64 | |
| The time of verifying a certificate/signature in ECDSA-256 | 96 | |
| The time for asymmetric encryption operation in RSA | 230 | |
| The time for asymmetric decryption operation in RSA | 184 | |
| The time to perform the cyclic group multiplication | 265 |
| WCED [1] | VCP [9] | Initial SKDP | Yu et al. [23] | Arora et al. [25] | |
|---|---|---|---|---|---|
| EDEV | |||||
| GECU | |||||
| Computation complexity | ≈ 512 ms | ≈ 513 ms | ≈ 266 ms | ≈ 2896 ms | ≈ 515 ms |
| WCED [1] | NSKUP [9] | Second SKDP | Yu et al. [23] | Arora et al. [25] | |
| EDEV | - | - | - | ||
| GECU | - | - | - | ||
| Computation complexity | - | ≈320 ms | ≈ 269 ms | - | - |
| Total computation complexity | ) ≈ 1024 ms | ≈ 833 ms | ≈ 535 ms | ≈ 5792 ms | ≈ 1030 ms |
| Number of storage message bits | 3578 | 3164 | 1890 | 8976 | 2528 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, L.; Xu, J.; Wang, Z.; Wang, C. A Provable Secure Session Key Distribution Protocol Based on NSSK for In-Vehicle CAN Network. Mathematics 2022, 10, 2903. https://doi.org/10.3390/math10162903
Yin L, Xu J, Wang Z, Wang C. A Provable Secure Session Key Distribution Protocol Based on NSSK for In-Vehicle CAN Network. Mathematics. 2022; 10(16):2903. https://doi.org/10.3390/math10162903
Chicago/Turabian StyleYin, Long, Jian Xu, Zihao Wang, and Chen Wang. 2022. "A Provable Secure Session Key Distribution Protocol Based on NSSK for In-Vehicle CAN Network" Mathematics 10, no. 16: 2903. https://doi.org/10.3390/math10162903