
Cloudformer V2: Set Prior Prediction and Binary Mask Weighted Network for Cloud Detection


Abstract
:1. Introduction
2. Materials and Methods
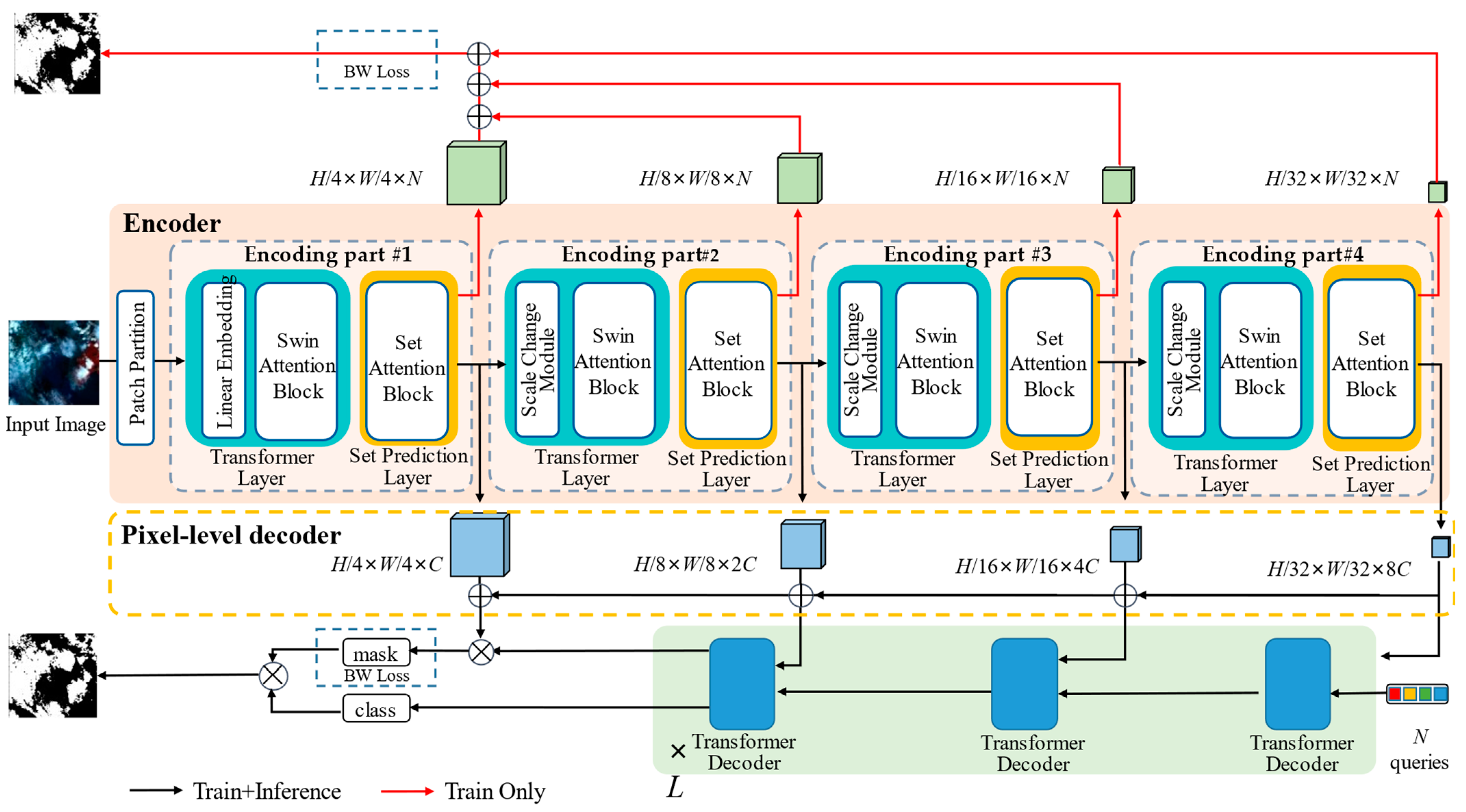
2.1. Overall Structure of Cloudformer V2
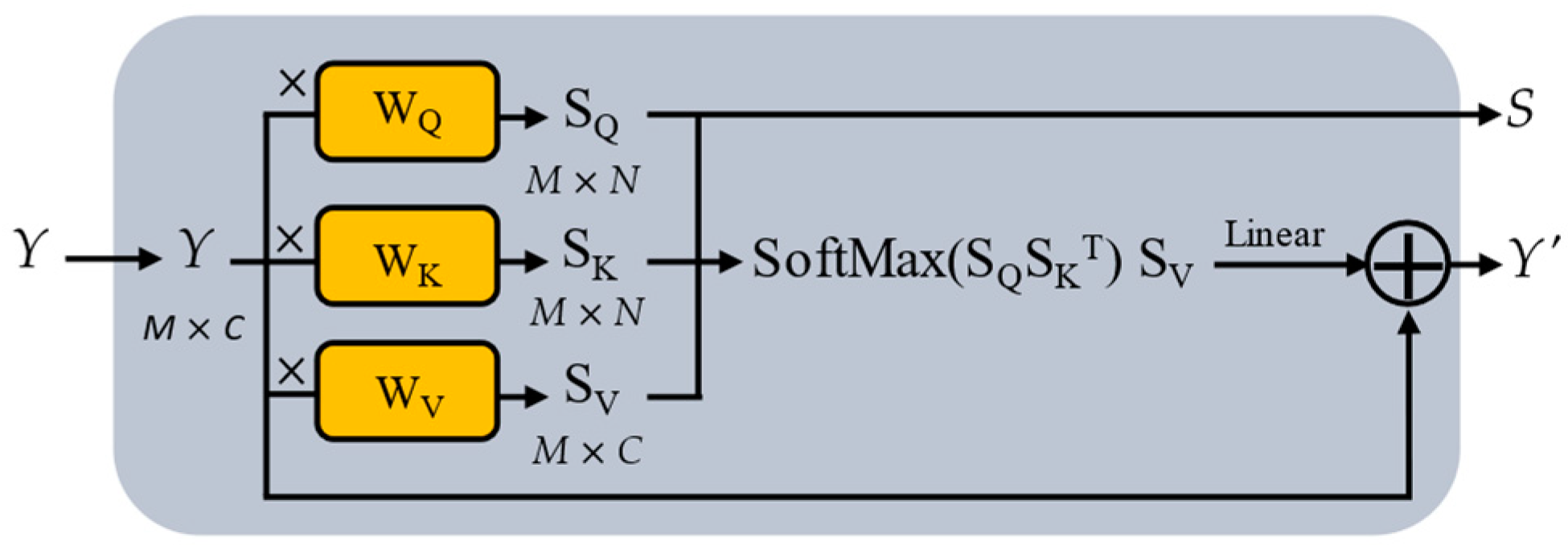
2.2. Encoder
2.3. Decoder
2.4. Binary Mask Weighted Loss Function
3. Results
3.1. Evaluation Criteria and Data Processing
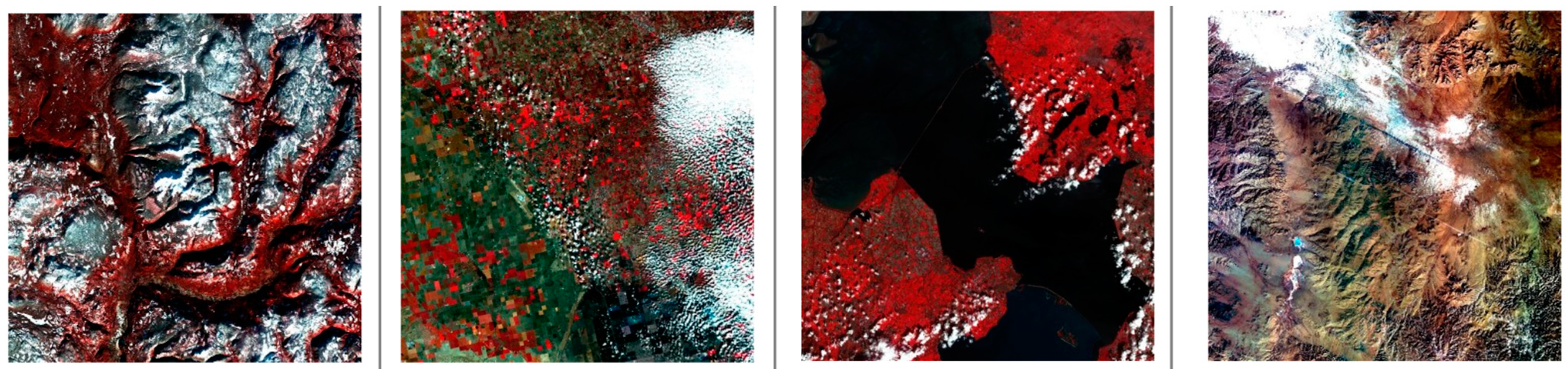
3.2. Cloud Detection Dataset
3.3. Comparisonl Models and Experimental Settings
3.4. Ablation Experiment
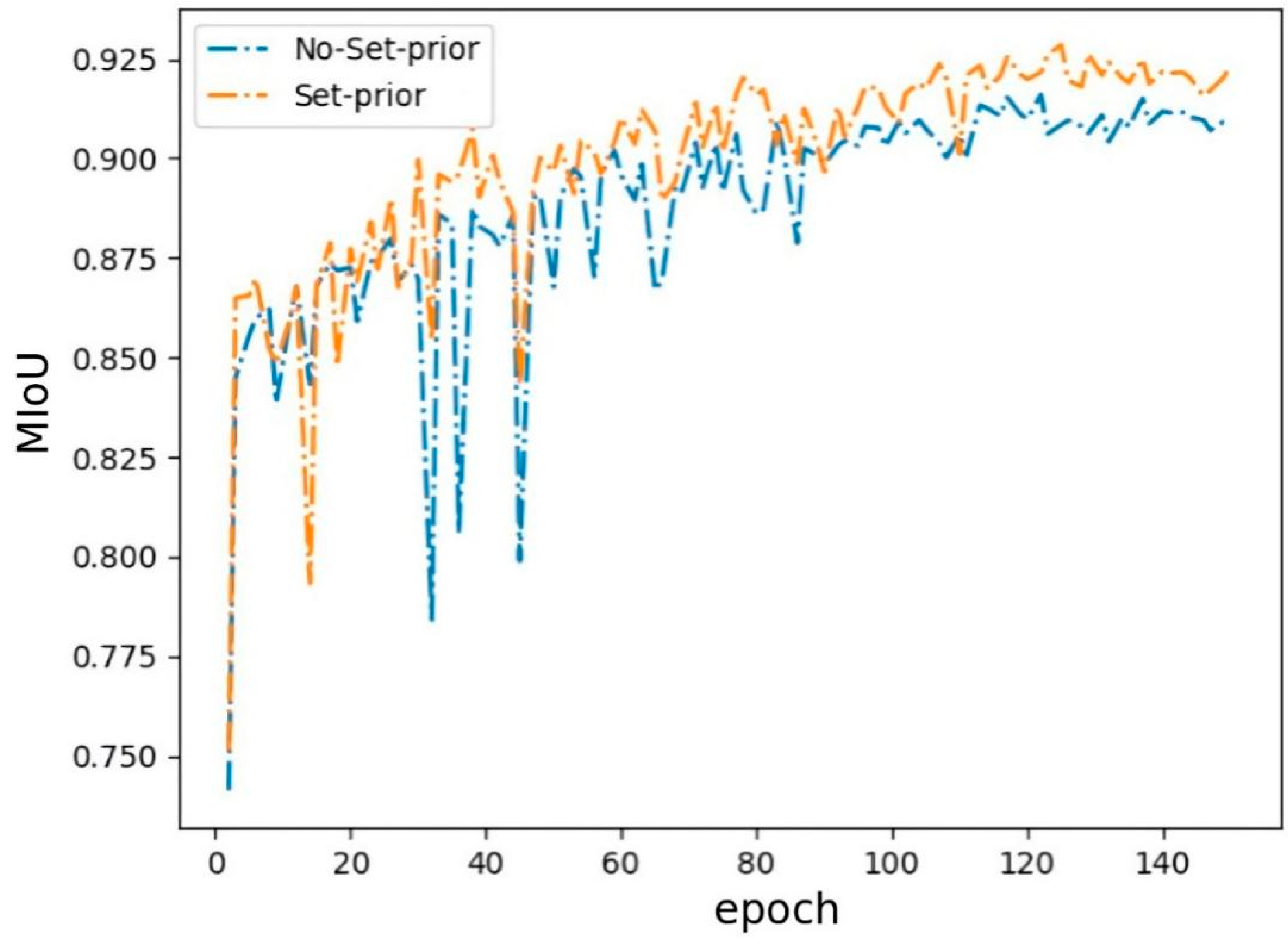
3.4.1. Effect of Set Prior Prediction
3.4.2. Effect of Set Attention Block
3.4.3. Effect of Multi-Scale Transformer Decoder
3.4.4. Effect of Binary Mask Weighted Loss Function
3.5. Comparison with State-of-the-Art Methods
4. Discussion
4.1. The Effectiveness of the Transformer Network and Set Attention Block
4.2. Binary Mask Weighted Loss Function Design and Analysis
4.3. Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ma, F.; Zhang, F.; Xiang, D.; Yin, Q.; Zhou, Y. Fast Task-Specific Region Merging for SAR Image Segmentation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Ma, F.; Zhang, F.; Yin, Q.; Xiang, D.; Zhou, Y. Fast SAR Image Segmentation With Deep Task-Specific Superpixel Sampling and Soft Graph Convolution. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Hagolle, O.; Huc, M.; Pascual, D.V.; Dedieu, G. A Multi-Temporal Method for Cloud Detection, Applied to FORMOSAT-2, VENS, LANDSAT and SENTINEL-2 Images. Remote Sens. Environ. 2010, 114, 1747–1755. [Google Scholar] [CrossRef] [Green Version]
- Mahajan, S.; Fataniya, B. Cloud Detection Methodologies: Variants and Development—A Review. Complex Intell. Syst. 2020, 6, 251–261. [Google Scholar] [CrossRef] [Green Version]
- Qiu, S.; Zhu, Z.; He, B. Fmask 4.0: Improved Cloud and Cloud Shadow Detection in Landsats 4–8 and Sentinel-2 Imagery. Remote Sens. Environ. 2019, 231, 111205. [Google Scholar] [CrossRef]
- Li, Y.; Chen, W.; Zhang, Y.; Tao, C.; Xiao, R.; Tan, Y. Accurate Cloud Detection in High-Resolution Remote Sensing Imagery by Weakly Supervised Deep Learning. Remote Sens. Environ. 2020, 250, 112045. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and Expansion of the Fmask Algorithm: Cloud, Cloud Shadow, and Snow Detection for Landsats 4–7, 8, and Sentinel 2 Images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Yang, J.; Guo, J.; Yue, H.; Liu, Z.; Hu, H.; Li, K. CDnet: CNN-Based Cloud Detection for Remote Sensing Imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 6195–6211. [Google Scholar] [CrossRef]
- Mohajerani, S.; Saeedi, P. Cloud and Cloud Shadow Segmentation for Remote Sensing Imagery via Filtered Jaccard Loss Function and Parametric Augmentation. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2021, 14, 4254–4266. [Google Scholar] [CrossRef]
- Zheng, K.; Li, J.; Ding, L.; Yang, J.; Zhang, X.; Zhang, X. Cloud and Snow Segmentation in Satellite Images Using an Encoder–Decoder Deep Convolutional Neural Networks. ISPRS Int. J. Geo-Inf. 2021, 10, 462. [Google Scholar] [CrossRef]
- Jeppesen, J.H.; Jacobsen, R.H.; Inceoglu, F.; Toftegaard, T.S. A Cloud Detection Algorithm for Satellite Imagery Based on Deep Learning. Remote Sens. Environ. 2019, 229, 247–259. [Google Scholar] [CrossRef]
- Boulila, W.; Sellami, M.; Driss, M.; Al-Sarem, M.; Safaei, M.; Ghaleb, F.A. RS-DCNN: A Novel Distributed Convolutional-Neural-Networks Based-Approach for Big Remote-Sensing Image Classification. Comput. Electron. Agric. 2021, 182, 106014. [Google Scholar] [CrossRef]
- Li, X.; Yang, X.; Li, X.; Lu, S.; Ye, Y.; Ban, Y. GCDB-UNet: A Novel Robust Cloud Detection Approach for Remote Sensing Images. Knowl. Based Syst. 2022, 238, 107890. [Google Scholar] [CrossRef]
- He, Q.; Sun, X.; Yan, Z.; Fu, K. DABNet: Deformable Contextual and Boundary-Weighted Network for Cloud Detection in Remote Sensing Images. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Kolesnikov, A.; Dosovitskiy, A.; Weissenborn, D.; Heigold, G.; Uszkoreit, J.; Beyer, L.; Minderer, M.; Dehghani, M.; Houlsby, N.; Gelly, S.; et al. An Image Is Worth 16x16 Words: Transformers for Image Recognition at Scale. In Proceedings of the International Conference on Learning Representations, Virtual, 9 May 2021. [Google Scholar]
- Bao, H.; Dong, L.; Wei, F. BEiT: BERT Pre-Training of Image Transformers. arXiv 2021, arXiv:2106.08254. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-End Object Detection with Transformers. In Proceedings of the European Conference on Computer Vision, Virtual, 22–24 February 2020; pp. 213–229. [Google Scholar]
- Li, J.; Yan, Y.; Liao, S.; Yang, X.; Shao, L. Local-to-Global Self-Attention in Vision Transformers. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Kuala Lumpur, Malaysia, 18–20 December 2021. [Google Scholar]
- He, K.; Chen, X.; Xie, S.; Li, Y.; Dollár, P.; Girshick, R. Masked Autoencoders Are Scalable Vision Learners. arXiv 2021, arXiv:2111.06377. [Google Scholar]
- Zhang, Z.; Xu, Z.; Liu, C.; Tian, Q.; Wang, Y. Cloudformer: Supplementary Aggregation Feature and Mask-Classification Network for Cloud Detection. Appl. Sci. 2022, 12, 3221. [Google Scholar] [CrossRef]
- Huang, S.; Lu, Z.; Cheng, R.; He, C. FaPN: Feature-Aligned Pyramid Network for Dense Image Prediction. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021; pp. 864–873. [Google Scholar]
- Jain, J.; Singh, A.; Orlov, N.; Huang, Z.; Li, J.; Walton, S.; Shi, H. SeMask: Semantically Masked Transformers for Semantic Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022. [Google Scholar]
- Park, N.; Kim, S. How Do Vision Transformers Work? In Proceedings of the International Conference on Learning Representations, Virtual, 23 June 2022. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer Using Shifted Windows. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021. [Google Scholar]
- Cheng, B.; Misra, I.; Schwing, A.G.; Kirillov, A.; Girdhar, R. Masked-Attention Mask Transformer for Universal Image Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022. [Google Scholar]
- Cheng, B.; Schwing, A.G.; Kirillov, A. Per-Pixel Classification Is Not All You Need for Semantic Segmentation. In Proceedings of the Conference and Workshop on Neural Information Processing Systems, Virtual, 6–14 December 2021; Volume 34. [Google Scholar]
- Milletari, F.; Navab, N.; Ahmadi, S.-A. V-Net: Fully Convolutional Neural Networks for Volumetric Medical Image Segmentation. In Proceedings of the 2016 Fourth International Conference on 3D Vision (3DV), Stanford, CA, USA, 25–28 October 2016; pp. 565–571. [Google Scholar]
- Song, Y.; Yan, H. Image Segmentation Algorithms Overview. arXiv 2017, arXiv:1707.02051. [Google Scholar]
- Thoma, M. A Survey of Semantic Segmentation. arXiv 2016, arXiv:1602.06541. [Google Scholar]
- Lateef, F.; Ruichek, Y. Survey on Semantic Segmentation Using Deep Learning Techniques. Neurocomputing 2019, 338, 321–348. [Google Scholar] [CrossRef]
- Lu, C.; Bai, Z. Characteristics and Typical Applications of GF-1 Satellite. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 1246–1249. [Google Scholar]
- Xiao, T.; Liu, Y.; Zhou, B.; Jiang, Y.; Sun, J. Unified Perceptual Parsing for Scene Understanding. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 418–434. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the International Conference on Learning Representations, San Diego, CA, USA, 7–15 May 2015. [Google Scholar]
- Yang, J.; Li, C.; Zhang, P.; Dai, X.; Gao, J. Focal Self-Attention for Local-Global Interactions in Vision Transformers. arXiv 2021, arXiv:2107.00641. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | MIoU (%) | MAcc (%) | PAcc (%) |
|---|---|---|---|
| Base Attention | 90.82 | 94.52 | 96.23 |
| Set Attention | 91.33 | 95.45 | 97.58 |
| Method | MIoU (%) | MAcc (%) | PAcc (%) |
|---|---|---|---|
| Base Transformer decoder | 91.32 | 94.84 | 96.23 |
| Multi-scale Transformer decoder | 92.49 | 95.41 | 97.21 |
| Method | MIoU (%) | MAcc (%) | PAcc (%) |
|---|---|---|---|
| Base mask loss | 90.76 | 93.11 | 95.76 |
| BW loss | 91.89 | 94.31 | 96.68 |
| Method | MIoU (%) | MAcc (%) | PAcc (%) |
|---|---|---|---|
| GCDB-UNet | 89.45 | 93.62 | 94.08 |
| SwinTransformer-UperNet | 90.47 | 93.37 | 94.12 |
| Mask2former | 90.89 | 94.69 | 94.89 |
| Cloudformer | 91.78 | 94.49 | 95.07 |
| Cloudformer V2 | 92.52 | 95.66 | 96.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Xu, Z.; Liu, C.; Tian, Q.; Zhou, Y. Cloudformer V2: Set Prior Prediction and Binary Mask Weighted Network for Cloud Detection. Mathematics 2022, 10, 2710. https://doi.org/10.3390/math10152710
Zhang Z, Xu Z, Liu C, Tian Q, Zhou Y. Cloudformer V2: Set Prior Prediction and Binary Mask Weighted Network for Cloud Detection. Mathematics. 2022; 10(15):2710. https://doi.org/10.3390/math10152710
Chicago/Turabian StyleZhang, Zheng, Zhiwei Xu, Chang’an Liu, Qing Tian, and Yongsheng Zhou. 2022. "Cloudformer V2: Set Prior Prediction and Binary Mask Weighted Network for Cloud Detection" Mathematics 10, no. 15: 2710. https://doi.org/10.3390/math10152710