
Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic



1
Departamento de Sistemas de Control, Facultad de Ingeniería, Universidad de Los Andes, Mérida 5101, Venezuela
2
Escuela de Ingeniería Química, Facultad de Ingeniería, Universidad de Los Andes, Mérida 5101, Venezuela
3
École Supérieure de Physique et de Chimie Industrielles de la Ville de Paris (ESPCI), PSL Research University, 10 rue Vauquelin, F-75231 Paris, France
*
Authors to whom correspondence should be addressed.
Educ. Sci. 2022, 12(4), 253; https://doi.org/10.3390/educsci12040253
Submission received: 11 March 2022
/
Revised: 26 March 2022
/
Accepted: 30 March 2022
/
Published: 1 April 2022
(This article belongs to the Special Issue The Role of Technology in Teaching, Learning, and Assessment during and Post-COVID-19: Opportunities for Innovation and Challenges)
Abstract
:The world is changing, and university education must be able to adapt to it. New technologies such as artificial intelligence and robotics are requiring tools such as simulation and process control to develop products and services. Thus, control systems engineering schools are adapting to new educational frameworks tailored to deploy promising and feasible new technologies. Herein, we have relied on computer animation-based education and its implementation as an online project-based strategy to attain the objectives and goals of the control systems engineering courses at University of Los Andes, Venezuela. The ControlAnimation library developed in Mathematica program in 2002 has been used as a tool to teach control systems engineering courses since 2008 and with greater prominence since 2020, when the stay-at-home orders due to the COVID-19 pandemic were enacted. Consequently, computer animation-based education has proven its feasibility as an online tool combined with project-based learning techniques, thus allowing students to interact with an animated control system by changing the mathematical model and the design parameters of control laws in a comfortable and somewhat playful way. This enabled new capabilities to study the dynamic behaviors of primordial control systems online. In addition, it allowed students to co-identify and relate in a more intuitive way to the mathematical models and control equations with the physical behavior of the real control systems.
1. Introduction
The history of humankind indicates that continuous technological advances have occurred, particularly in the 20th century, and with an accelerated pace nowadays [1,2,3]. The development of computers and computational capabilities have led to the deployment of promising technologies that are helping humans to perform crucial activities in scenarios such as product manufacturing facilities [4], robotic prosthetic implants [5,6] and even educational tools [7].
Since the beginning of 2020, the COVID-19 pandemic [8] has struck the life of more than 1.5 billion students worldwide, according to UNESCO [9,10,11,12], including control systems engineering undergraduates [13]. Stay-at-home orders were enacted, and university education transitioned from presential to online education [10,14]. Thus, new teaching strategies were deployed to make online education feasible, including computer animation-based education [7,15,16,17].
The 2017 UNESCO report [18] calls for a transformation in engineering education, thus identifying an engineer’s profile as three-faceted: as a designer, researcher, and manager [19,20]. Moreover, the UNESCO 2030 Agenda acknowledges Science, Technology and Innovation (STI) as “key drivers for sustainable development,” supporting the “sustainable economic development, entrepreneurship and youth employability” [18]. Thus, engineering education must simultaneously work on two complementary tasks: on the one hand, the definition of the skills and competencies for graduating engineers, and on the other hand, the development of effective teaching methods that help to reduce the gap between knowledge and action [19,20,21].
In the present work, computer animation-based education and its implementation as an online teaching and learning strategy through project-based learning is reviewed. The strategy has been used to attain the objectives and goals of the control systems engineering courses since 2020, after the lockdown and stay-at-home orders were implemented in Latin American countries. Thus, we used innovative teaching and learning strategies, such as project-based learning to attain the educational goals and overcome the challenges of reaching out to students through online education [22,23]. The research products (computer animations) that were attained through 20 years of studies in the Department of Control Systems at the University of Los Andes are reviewed, and their implementation is discussed. We end with a perspective on incorporating such approaches to control systems engineering education even after the pandemic finishes.
The present work is divided into seven sections. Section 1 and Section 2 present a brief introduction with a rationale of the paper, computer animation definition, and main applications. Then in Section 3, the use of computer animation in teaching control systems at the university level is described. Section 4 introduces project-based learning as a strategy that can be deployed with online education and computer simulation. Section 5 displays how the ControlAnimation library has been implemented and used as an educational tool in the teaching and learning of control systems engineering. In Section 6 and Section 7, the challenges and opportunities of implementing computer animation as an educational tool in control systems engineering undergraduate programs and conclusions are discussed, respectively.
2. Computer Animation
Technological advances in computer science have led computer animation to thrive over the past few decades [17,24,25]. The main reason being the need to interact with what we will call animated digital objects [16,26]. This need arises mainly due to the limitations, costs, or non-existence of such objects in reality [27,28,29].
Computer animation, also called computational graphics, digital animation, or computational mimics, consists of a series of images, frames, or graphics designed on a computer, which describes states or positions of a certain digital object at different time frames [30]. Mathematically speaking, time is defined discreetly: t = kT0, where time belongs to the natural numbers: t ∈ N, the sampling period T0 belongs to the real numbers: T0 ∈ R and k are the instants of time: 1, 2, 3, 4, 5, ..., n [26]. In the computational world, we can define Tc = T0, where Tc represents the sampling period with which each computer graph is presented. Hence, it is intuitive to think that, at a lower value of Tc, the reproduction of the set of computational graphics will resemble a representation or graphic animation. Thus, the human eye’s perception of the representation will seem continuous. However, the value of Tc must be chosen in such a way to balance the proper visualization of the computationally animated digital object and the Random Access Memory (RAM) consumption used in the number of images generated and that afterward must be reproduced sequentially.
Therefore, the computational sampling period defined in this work as Tc is chosen according to the animated digital object’s visualization requirements. The latter is performed by accounting for both the computer’s hardware and software limitations. This is in contrast with the scope of the sampling period T0 in linear control systems, defined by Isermann [31]. According to Kerlow [32], computer graphics technology as a digital animation application was developed in the 1950s, and its technical development took place in the 1980s, with the deployment of 3D animation [15,33]. One of the first and most crucial computer animation applications dates back to the 1980s, when flight simulators were used to train pilots [34]. This allowed the avoidance of the risk of exposing pilots to flying a real plane without proper training, thus preventing accidents [35]. Since then, computer animation has been developed for entertainment, training simulators, creating objects non-existent in reality, cartography, industrial and architectural design, teaching and educational purposes [36,37,38,39,40,41,42,43,44].
3. Computer Animation in Teaching Control Systems at the University Level
The Matlab (MathWorks) and Mathematica (Wolfram) computer programs have been used since the end of the 1990s as the main computational tools for the analysis and design of both continuous and discrete control systems at the University of Los Andes, Venezuela [45]. Version 4.0 of Mathematica presented the possibility of designing and graphing primitive digital objects or elements, such as lines, circles, rectangles, triangles, among others, in 2D and 3D [27,46]. These digital objects could be graphed at different time instants and then reproduced in the same frame or workspace in such a way that they gave the feeling of visualizing an animated digital object. However, at that time, no computer program offered the possibility to interact with control systems-related animated digital objects.
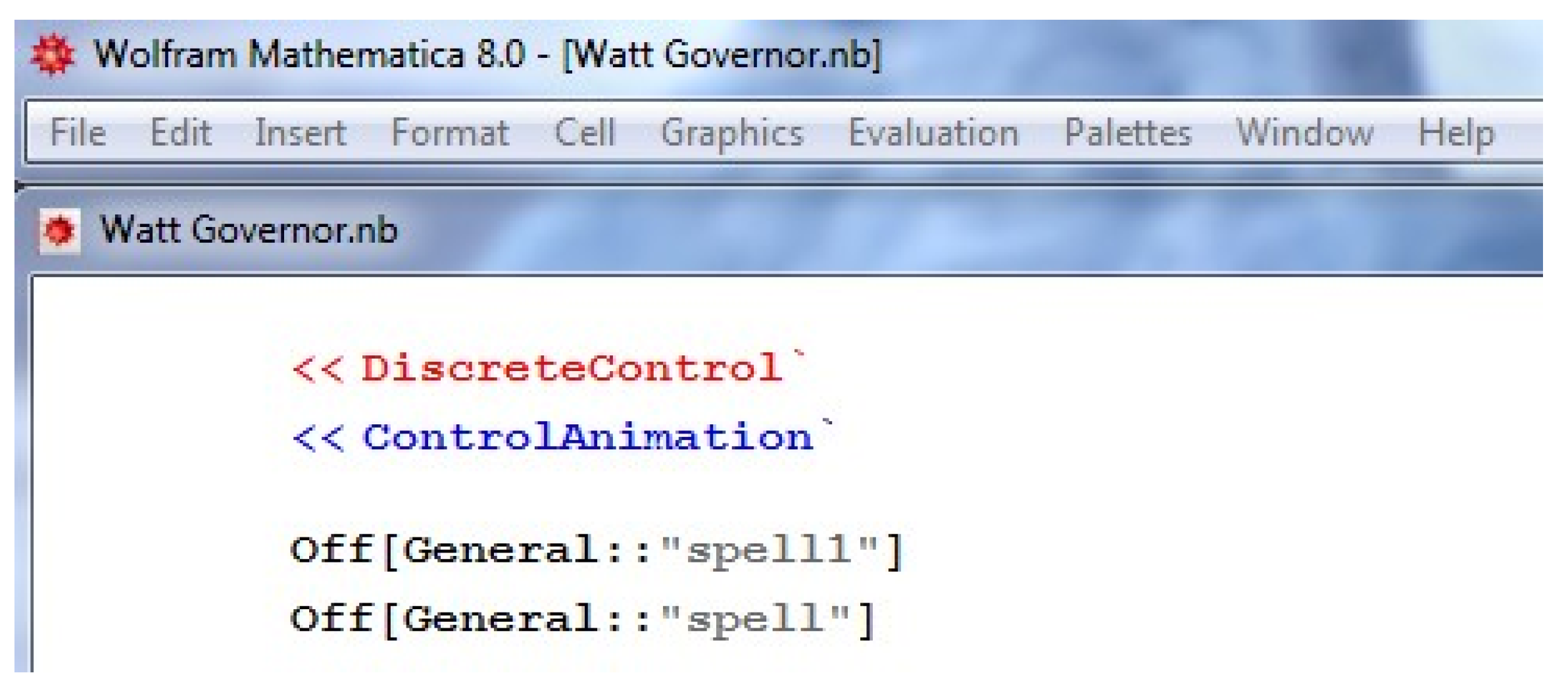
In 2002, an application (library) for the Mathematica software (Figure 1) was developed in the Department of Control Systems at the University of Los Andes, the ControlAnimation library [30,47,48]. The ControlAnimation library was created on a personal desktop computer with the following technical characteristics: 2 Gb RAM, Processor Intel Core Duo 2.20 GHz, and a 300 Gb hard drive, under Windows operating system.
Mathematica Version 4.0 installation requirements were: 15 Gb of hard disk space, 1.8 GHz or greater processor, and 2.0 Gb minimum RAM. These were specifications that by 2002 were commonly found in most personal computers and desktops available in the digital laboratory of the Department of Control Systems at the University of Los Andes. Installing the ControlAnimation library requires no more computational requirements than installing Mathematica.
The ControlAnimation library consists of a series of libraries in function format (work files with extension .m) grouped in a folder called ControlAnimation and which must be installed in any version of Mathematica software within the following address: Wolfram Research\Mathematics\4.0\AddOns\Applications. After installing the ControlAnimation library, the student does not need access to the internet or any other program.
The up-to-date version of Mathematica software is 13.0. Its computational requirements are as follows: Disk Space 19 GB; RAM 4 GB; Internet Access (required to use online data sources from the Wolfram Knowledgebase).
The ControlAnimation library is an integrated symbolic-graphic-numerical computational tool, which allows visualizing by computer animation both the dynamics in open loop and the controlled dynamics of some linear and non-linear physical systems [47,48].
The main reason Mathematica software was chosen for the deployment of computational animations of some control systems in 2001 was its integration of symbolic-graphic-numerical computational software, allowing at that time the symbolic calculation and the development of graphic elements. Symbolic calculation is of utmost importance in analyzing and designing control systems. It allows all the mathematical calculations to be performed symbolically (without using numerical values) on the analysis and subsequent design of control laws. Therefore, it was crucial that suitable software that includes symbolic calculations should be used, which is the case of Mathematica. Furthermore, it is worth noting that symbolic calculation involves complex operations for the analysis and design of control systems that require non-trivial variable isolation and the symbolic calculation of integrals and derivatives. Thus, libraries (work files in Mathematica) were developed, taking into account the latter properties of symbolic computation that contain all the symbolic calculations for control laws analysis and design of the physical systems under study. Also, a simple interface was created that allows the operator of the library (the professor or students) to enter the corresponding or desired numerical values and obtain the variables. Therefore, the results are the interest variable traditional simulations vs. time and the computer animation of the physical system under study, showing its behavior similar to the physical reality of the system. This is a property that at the time other software, such as Matlab or Maple, did not offer, since the latter did not allow the development of graphic elements. Moreover, Matlab or a programming software such as Easy Java/Javascript Simulations (EJS) [49,50,51] did not enable symbolic calculation.
One of the disadvantages of using Mathematica software is that it is not open-source software. This means that Mathematica software, like Matlab, involves licensing costs. However, these types of software are the most used in control theory analysis and design. The Department of Control Systems at the University of Los Andes includes a simulation laboratory equipped with several desktops with Matlab and Mathematica software installed. However, the availability of this laboratory is limited by the course schedule and the computer requirements of all the students.
The latter are commonly used as tools in teaching analysis and design of control systems in universities worldwide. Thus, throughout the application of the ComputerAnimation library framework, control systems were developed, and among them can be mentioned:
- Mass-spring-damper system;
- Simple pendulum;
- Inverted pendulum;
- Inverted pendulum mounted on a cart;
- Double inverted pendulum mounted on a cart;
- Two inverted pendulums mounted on a cart;
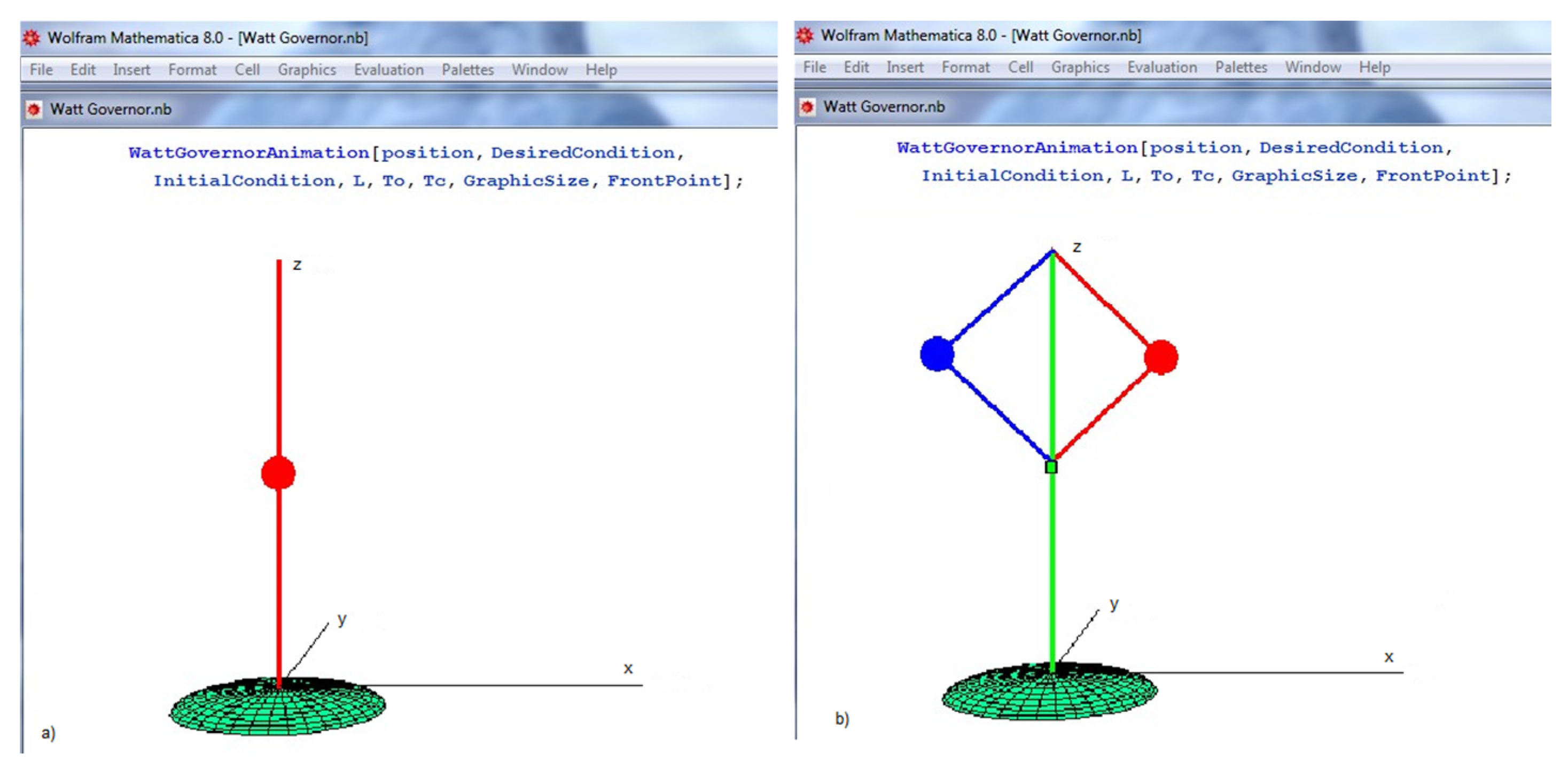
- Watt Governor (Figure 2);
- Centrifugal pendulum;
- Airplane.
Figure 2.
Watt Governor computer animation: (a) Initial position in zero degree; (b) Desired position at 45 degrees. Adapted from [26]. Supplementary Materials Video S1 and Document S2 show a video of the computer animation of the Watt Governor and the Mathematica software code, respectively.
Figure 2.
Watt Governor computer animation: (a) Initial position in zero degree; (b) Desired position at 45 degrees. Adapted from [26]. Supplementary Materials Video S1 and Document S2 show a video of the computer animation of the Watt Governor and the Mathematica software code, respectively.

In 2005, new functions were added to the ControlAnimation library in order to analyze the discretization (sampling) of non-linear systems [46,52]. This allowed the library to serve as teaching support in post-graduate courses in the field of control systems, such as at the master’s level. As an example, in Velasco’s master’s degree work in 2010 [53], new discretization techniques were applied for non-linear systems, and non-linear control design adapted to the inverted pendulum control system. First, on the computer animation of the inverted pendulum [53] and later, once its proper functioning was confirmed, these techniques were applied to the actual physical systems deployed in the laboratory [54].
The ControlAnimation library was and is still used to teach the dynamic behaviors of primordial control systems, such as a greater approach and understanding of the operation of these systems and visualizing their responses to different inputs or control laws. For example, it complements the instructional framework through variable vs. time graphs [55,56]. This highlighted the advantages of the teaching technique, allowing students to co-identify and relate in a more intuitive way to the mathematical models and control equations with the physical behavior of the real system.
For instance, a physical control system can be on a solid plane surface, and students would perform the analysis and design on such a system, usually forgetting certain restrictions or physical limitations of the real system’s behavior. These restrictions include designing control laws that work well mathematically speaking, meeting the system’s objective to the desired final conditions. However, it is physically impossible to implement them in the mentioned real system, since the dynamics of the real system in terms of its position, in some instants of time, present negative values (below the physical surface supporting the system). These are mistakes students usually make due to their inexperience and the lack of visualization and understanding of the system’s behavior through traditional two-dimensional graphs (variable vs. time).
By the year 2010, the use of computer animations in control systems was booming. Major computer programs such as Matlab and Mathematica already included some commands and libraries that allowed interaction with certain animated digital objects, mainly the simple and the inverted pendulum. However, these versions were not free or easily accessible to most students in the Department of Control Systems at University of Los Andes.
4. Project-Based Learning and Online Education through Computer Animation
Project-based learning (PBL) has been established throughout the 20th century as a tool to improve classical (or traditional) education practices [23]. It is a methodology developed from the Aalborg University Model in the early 1970s [57,58,59], which is based on three principles: cognitive learning, the contents, and social approaches [58,60,61]. The latter is linked to the UNESCO education goals, including learning to know, learning to do, learning to live together and learning to be, which require new teaching and learning strategies to be applied as an alternative to old educational ways [62,63]. Recent works have discussed PBL characteristics, highlighting commonalities and specific contrasts with other strategies, such as problem-based learning, with a distinctive difference in the effectiveness of the methods [23,59,61,62,63,64,65,66]. Moreover, the UNESCO report in 2010 [67,68], indicates the importance of an innovative mindset in engineering graduates. Thus, using project- and product-based educational strategies would allow engineering students to attain the know-how crucial for their professional practice and reach their goals of self-being and social development, representing the broader objectives of education [22,69], highlighting the need for engineers’ education to develop interactions, diversity and information searching skills [8]. Additionally, project- and product-based learning have been involved in the current discussion on how to fulfill industry needs and satisfy the requirements of knowledge of engineering fundamentals [22,39,57,63].
Another component of the project-based learning framework is the connection between the industry requirements and the global management of economic development. Both are related to engineering education, stressing the importance of an entrepreneurial mindset in engineering graduates [19]. According to recent research work [60,70] more engineering programs are including learning environments that enable experimenting with entrepreneurial behavior. PBL experiences have multiplied in recent years, even more after the COVID-19 pandemic started [13]. Accordingly, multiple examples of the deployment of PBL strategies can be found in the literature, including courses in design and engineering curricula [13,23,57,60,61,64].
Furthermore, new generational groups, such as Generation Z [68], are more inclined to use computers and technological devices as tools to learn [63]. Thus, several universities have started implementing computer animation-based and project-based learning strategies to attain the course goals [69,70]. The interest and application of such strategies have been heightened during COVID-19, before and after the confinements were enacted. Consequently, a more enriched field of online strategies related to project- and product-based education have been developed and are available [9,10,13]. Among the innovations is the extended use of online meeting tools such as Google Classroom, Zoom, Teams, among others, that have been adapted to the virtual learning environment. In order to do that, professors have developed creative initiatives to enhance the virtual teaching experience [71]. In the following section, a thorough review of the research works and the implementation of computer animation as a promising way to adapt control systems engineering education to present times is performed.
5. Computer Animation as an Educational Tool in Teaching and Learning of Control Systems Engineering
Since 2008, the ControlAnimation library has supported the process of undergraduate students’ teaching and learning at the Department of Control Systems at University of Los Andes, using a project-based learning framework as an educational tool. Each student or pair of students was assigned one of the control systems from the ControlAnimation library. All the concepts, theories, and techniques of the discrete control program were applied to the control system. First, students had to develop all the calculations and mathematical analyses according to their control system. Then they had to observe the dynamics given by traditional graphs vs. time and finally visualize the dynamics on the computer animation (computational mimics), thus connecting mathematics with the real system physics.
This project-based learning technique allows each student to interact with an animated control system (virtually). The student has the possibility and freedom to change both the parameters of the system’s mathematical model and the design parameters in control laws in a comfortable and somewhat playful way. Thus, the student does not have the pressure to interact with a real physical system, which can somehow be damaged due to their inexperience (as sometimes happens). Hence, the student interacting with the computer animation system can afford to make mistakes, learn from their mistakes, and perform virtual tests before implementing the control laws designed in real control systems (in case of having real physical systems available in the laboratory).
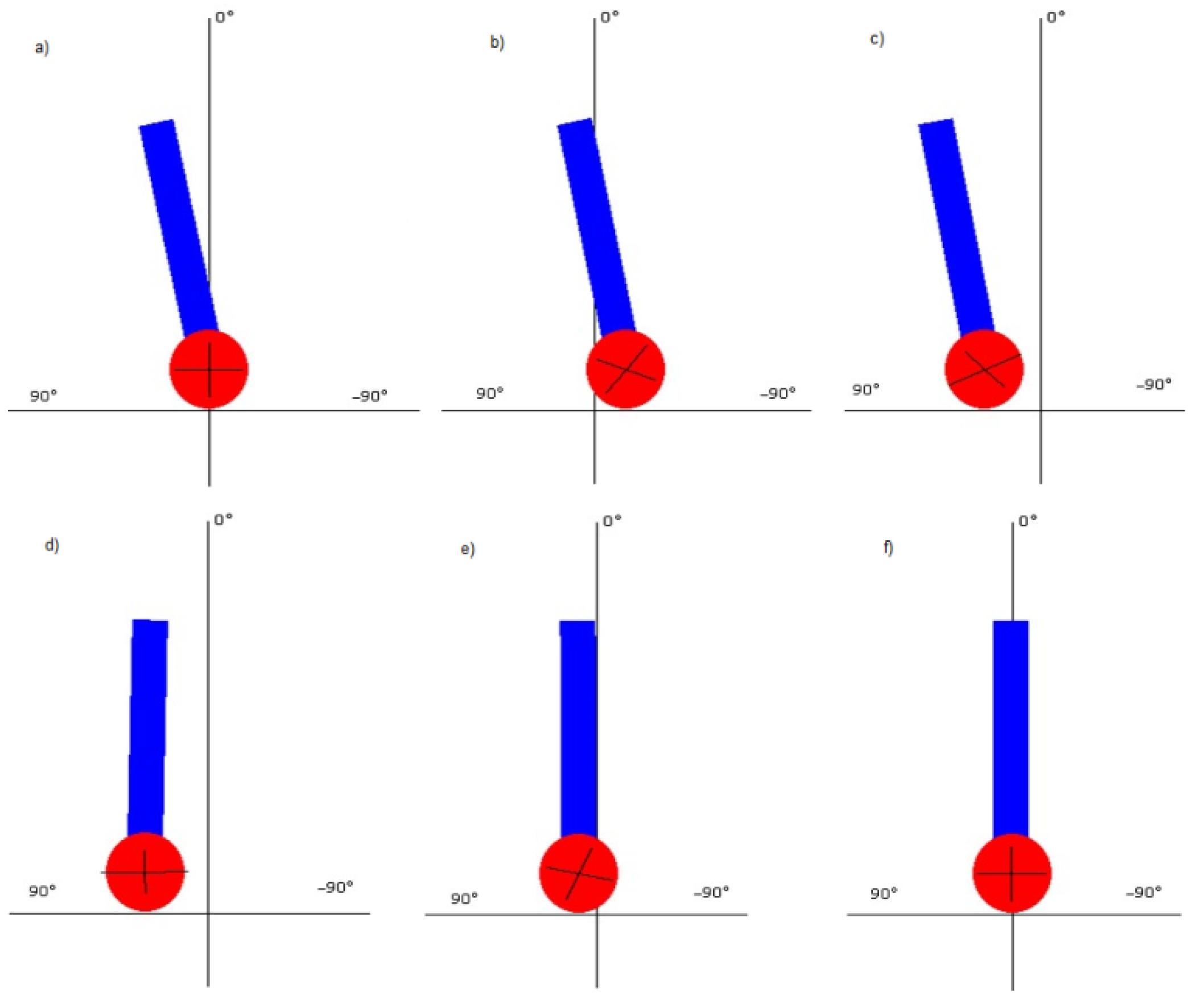
These educational tools were also implemented in undergraduate thesis projects at the Department of Control Systems, such as the research work developed by Sánchez [54], where computer animation of the inverted pendulum system was used (Figure 3). First, different simulated experiments with designed control laws were performed, and their behaviors were visualized on the inverted pendulum computer animation, before and after perturbations in the pendulum bar length parameter value; then, control laws were implemented over the real system built in the lab.
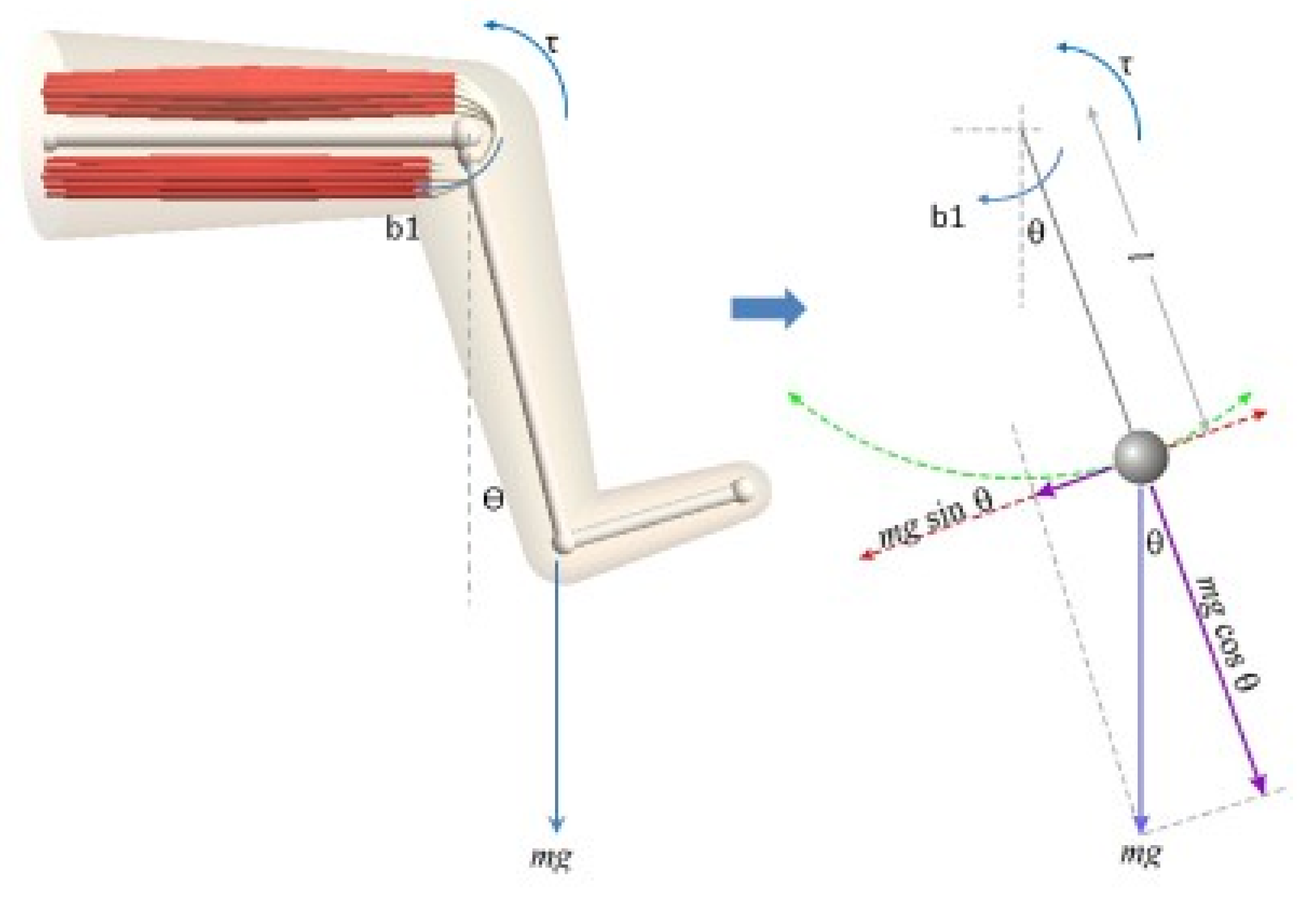
In 2015, Marquez [16] developed the Reflex Arc model in his degree thesis (Figure 4) as a computer animated digital object using the Mathematica program. Thus, he was able to analyze better the dynamics of its mathematical model and the behaviors of this system and its subsystems before the designed control laws. In this case, it was impossible to apply these control laws to the real system (human beings) without being invasive in the system, so computational mimics were of great help to understand the behaviors beyond the traditional graphs of response variable vs. time.
At the beginning of 2020, due to the COVID-19 related confinement in Latin America, most universities in Venezuela, including the University of Los Andes (ULA), went from face-to-face teaching to the distance education mode. Therefore, information and communication technology (ICT) became essential to support distance education, implying a change in the teaching characteristics of specific educational content in the Department of Control Systems at the ULA. Accordingly, the use of computer animation educational tools and project-based learning became of utmost importance to make feasible these new ways of teaching [9,13].
In Table 1 is described the conceptual framework of some of the Control Systems Engineering undergraduate program, which includes 10 academic periods of 6 months each, at the University of Los Andes, in which the ControlAnimation library has been used as support in the educational process since 2008. Table 2 presents traditional learning strategies and Table 3 project-based learning strategies applied to the Control Systems Engineering courses described in Table 1.
The ControlAnimation library has been used as an educational tool since 2008 in the courses already mentioned above. In addition, the ControlAnimation library has been used progressively in control theory courses, to the extent that the pre-established educational contents, education and evaluation strategies of these courses have been adapted to the inclusion of the ControlAnimation library. Therefore, the ControlAnimation library deployment can be valued quantitatively according to the course number of contents, activities, and evaluations which are supported by the use of the tool. The latter is performed with a 0 to 100% scale, 100% corresponding to all the content, activities, and evaluations the course requires.
Project-based learning strategies increase the use of the ControlAnimation library in the different courses (in % in Table 4), since these strategies allow the traditional course contents to be adapted to innovative educational practices. It should be noted that the traditional contents were designed under the concept of conventional education based on masterclasses, where the professor is the active actor and the students are passive actors. Project-based learning strategies however focus on learning, where students are the active actors, and the professor becomes a guide or tutor. The most used project-based learning strategies are active-learning, visualizing systems thinking (adapted to control systems), problem-solving techniques, experiential activities and case-studies method. For example, using the visualizing systems thinking strategy gives opportunities throughout the process by means of computer animation tools to visualize the dynamics of the implementation of control theory techniques in the proposed exercises.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 4.
Average students’ grades before and during the pandemic in some Control Systems Engineering courses.
Table 4.
Average students’ grades before and during the pandemic in some Control Systems Engineering courses.
| Year | Course Name | Students Use of the ControlAnimation Library in Their Activities (%) | Average Grades (Range 1–20 pts) | Students Approved Course (%) |
|---|---|---|---|---|
| 2011 | Digital Control | 30 | 12.3 ± 1.7 | 85 |
| 2011 | Robust Control | 30 | 13.7 ± 1.9 | 95 |
| 2012 | Digital Control | 40 | 13.1 ± 1.7 | 90 |
| 2012 | System Identification | 20 | 14.6 ± 2.1 | 98 |
| 2013 | Digital Control | 50 | 14.7 ± 2.0 | 100 |
| 2013 | System Identification | 30 | 15.8 ± 1.9 | 95 |
| 2014 | Physics Systems Modelling | 20 | 12.4 ± 1.5 | 89 |
| 2014 | System Identification | 40 | 15.7 ± 2.0 | 100 |
| 2015 | Physics Systems Modelling | 30 | 13.8 ± 1.9 | 95 |
| 2015 | System Identification | 40 | 16.2 ± 1.8 | 100 |
| 2017 | Physics Systems Modelling | 40 | 14.1 ± 1.8 | 98 |
| 2017 | System Identification | 50 | 16.4 ± 2.0 | 100 |
| 2018 | Physics Systems Modelling | 40 | 13.9 ± 1.9 | 97 |
| 2018 | System Identification | 50 | 16.3 ± 1.5 | 00 |
| 2019 | Physics Systems Modelling | 40 | 14.2 ± 1.6 | 98 |
| 2020 | Physics Systems Modelling | 60 | 16.6 ± 1.8 | 97 |
| 2021 | System Identification | 80 | 18.7 ± 1.9 | 100 |
| 2021 | Automatic Control History | 80 | 17.8 ± 2.1 | 97 |
On the other hand, one of the significant limitations of the teaching of identification techniques occurs when there is no provision of real control systems in the laboratory (they do not exist or are outdated). Thus, experiential activities may be possible by using the ControlAnimation library, providing input-output data from common computer-animated control systems (including noise signals or disturbances in the system). This allows students to work with control systems through computer animations as a black box, where the system model and computer animation are not visible to students. Furthermore, different objective-based strategies are designed to achieve the proposed student learning depending on the content.
As for the percentage of the ControlAnimation library use under project-based learning strategies in the control systems courses, its value is quantified as follows.
A value of 1% to 30% when the ControlAnimation library is used only as a support tool for demonstrations. In this case, the professor operates the library and shows his students the results obtained, analyzing the professor’s results.
From 31% to 50% when the professor operates the library in some content or activities and shows students the results obtained. In contrast, in other content or activities, the students themselves manipulate the ControlAnimation library to get the results and analysis required by the professor, always under the supervision and guidance of the professor at each step. The results are analyzed between the professor and students.
From 51% to 80% when students, according to indications given virtually by the professor, manipulate the ControlAnimation library by themselves to complement the theoretical studies taught by the professor in a virtual way (digital material, videos), obtaining the results and analyses required by the professor. Performing the practical exercises required by the professor; and sometimes the students themselves build computer animations, either using Mathematica or other open-source computer animation programs to represent new physical systems of control systems, reaching a new level of understanding and understanding of the system under study.
Finally, a value of 81% to 100% is attained when all the activities are performed through project-based learning, which is unfeasible according to the teaching required in control systems engineering, which sometimes requires the professor’s intervention.
Thus, since 2020, when stay-at-home orders due to the COVID-19 pandemic were enacted, the ControlAnimation library has been used with greater prominence by using project-based learning strategies and the new open-source computer animation programs available on the internet. In Table 4, the quantitative evaluative results throughout a 10-year period (2011–2021) are shown. The data includes the average grades and percentage of students that approved the course before the pandemic and during the pandemic in Control Systems Engineering courses at the University of Los Andes.
Before the pandemic, students’ attendance at the Department of Control Systems at the University of Los Andes was regulated. Thus, it was not crucial to have the necessary technological resources to use the ControlAnimation library (for example, on their personal computer). These resources were provided by the university as far as possible. However, the stay-at-home orders and transition to online education enacted in 2020, impelled professors and students to use technological resources, including having the software for distance education to be feasible. Therefore, since 2020, the students enrolled in the courses indicated in Table 4 must have their own technological resources, such as internet access, personal computer, and Mathematica Software. This facilitated the inclusion of greater use of the ControlAnimation library. However, due to the implementation of distance education learning, the traditional way of classroom education had to be adapted to this new modality. Therefore, project-based learning strategies were applied (these depend on the content of the course, the activities and the type of evaluation that are desired) to meet the teaching-learning objectives required by the course and the university program.
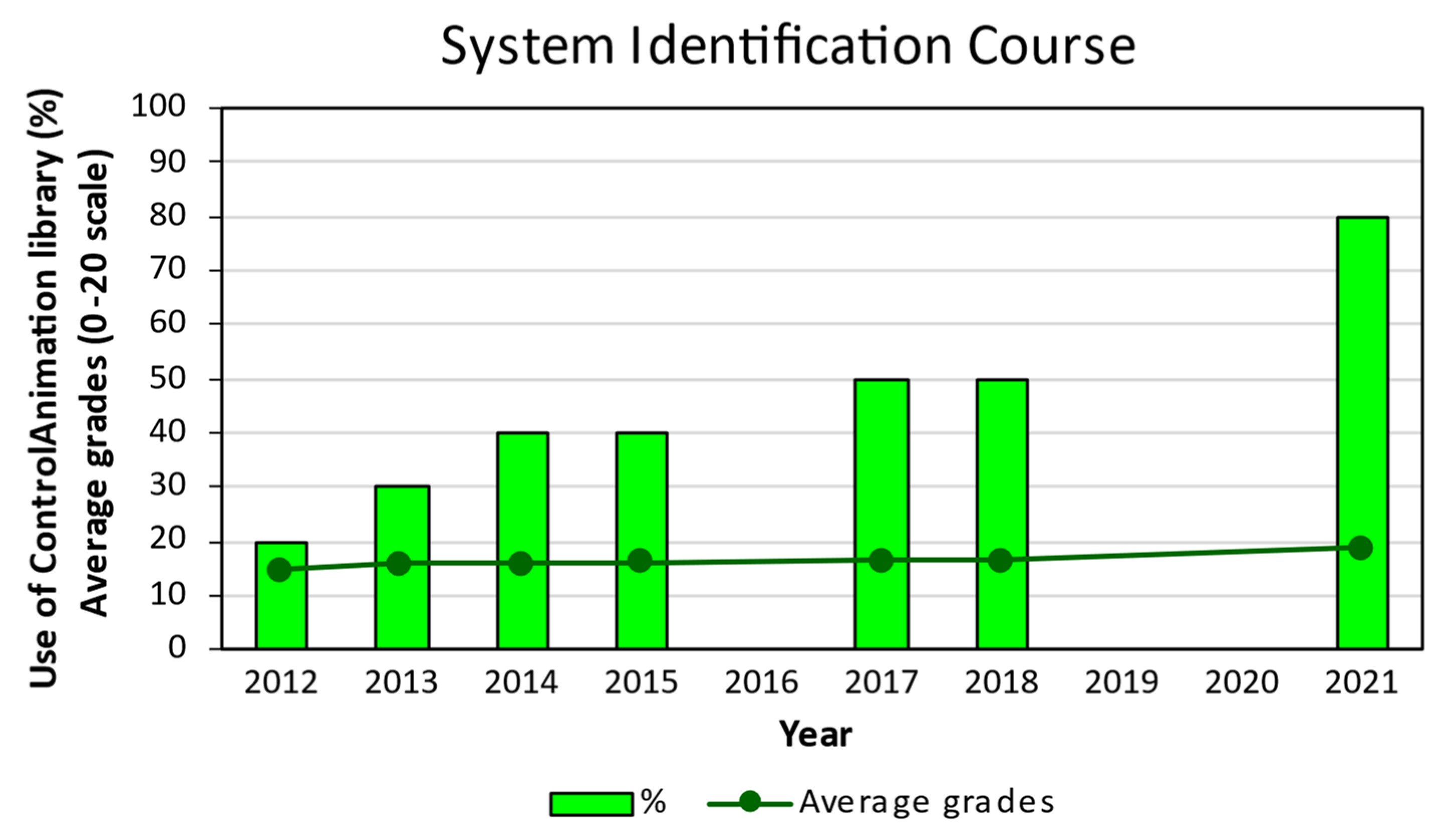
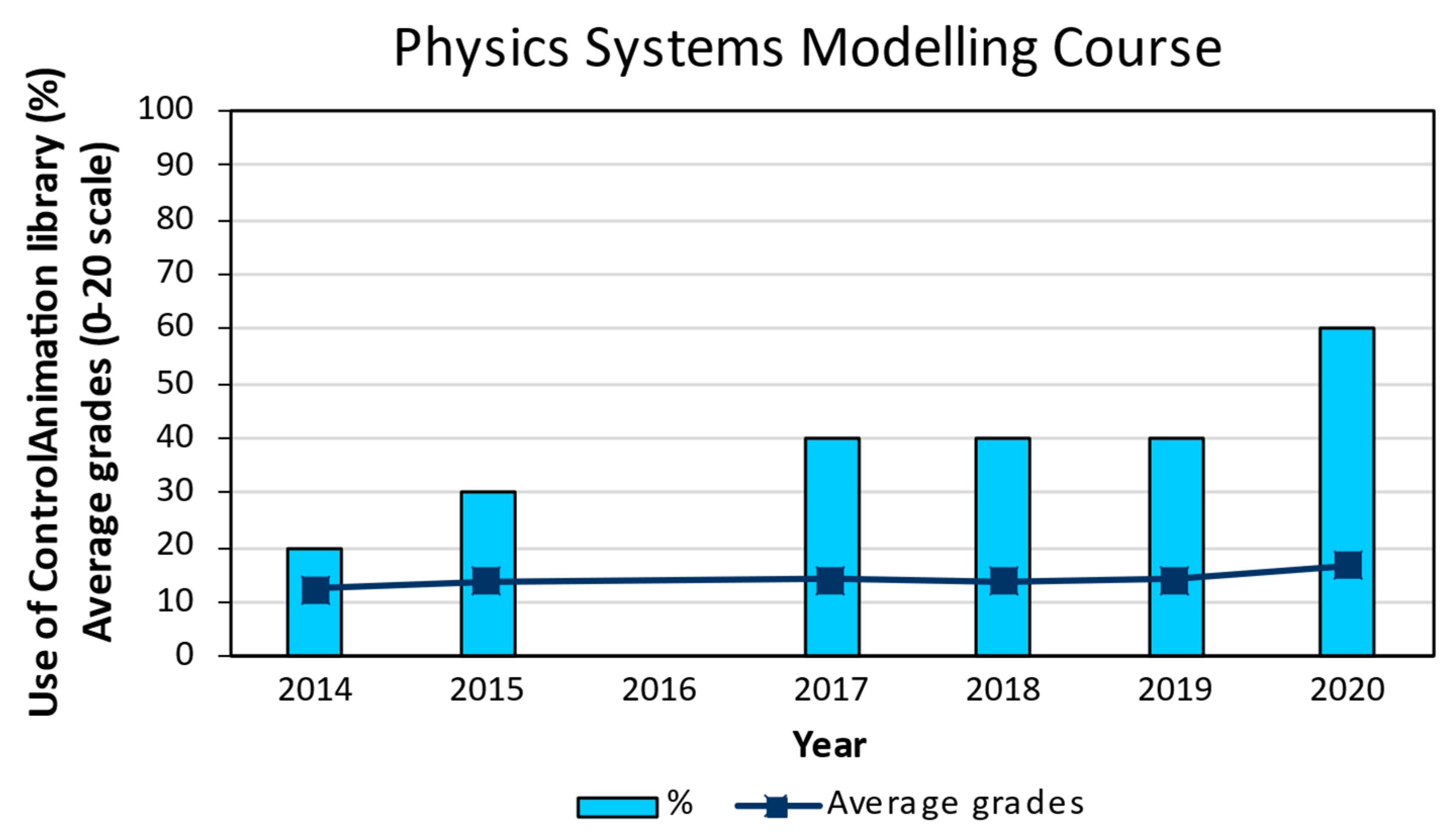
The results shown in Table 4 illustrate how the average grades have been progressively increasing in the same courses. In addition, the percentage of ControlAnimation library that the students use in their course activities has also increased to support the learning process. Figure 5 and Figure 6 summarize the main results from Table 4.
Figure 5 and Figure 6 indicate that, in the courses System Identification and Physics Systems Modelling, the average grades increased during the pandemic years by implementing project-based learning strategies using the ControlAnimation library in a higher percentage. Good results were also observed in the Automatic Control History course (Table 4), using the ControlAnimation library and project-based learning strategies in 2021. The average grades obtained indicate a trend of increasing grades, representing a promising evolution of students’ performance in the course. However, the latter should be further analyzed in several instances (courses, university programs) to understand if there is a connection between students’ performance and learning of functioning and analysis of control dynamics compared to traditional education strategies. Thus, further research and a broader implementation (in other courses or other control engineering undergraduate programs) should be performed.
6. Challenges and Opportunities of Implementing Computer Animation as an Educational Tool in Control Systems Engineering Undergraduate Programs
Technological advances, both at the software and hardware level, and the approach and expertise of control engineering students in using computational tools have shown the usefulness and feasibility of implementing computer animations in distance courses. The transition has been smooth, pleasant, and even fun for students at the Department of Control Systems. Nowadays, the feasibility of the strategy has allowed students to have a wide set of applications, both in Matlab-Simulink and Mathematica, as well as access-free online software (V-Realm 3D, Clara.io, among others). This has allowed an easy and intuitive way to build computer animations based on the physical characteristics of control systems commonly used in the teaching of control theory.
Today the same level students are able to build the computer animations of some control systems and connect their mathematical and computational operation according to the mathematical model that represents the physical system. Additionally, allowing visualization of the system’s dynamics through computational mimics (computer animation), all this in less than a week. This opens up a toolbox of great possibilities for students, being able to analyze almost any physical control system from the comfort of their homes with the appropriate technological support, without the mandatory need for the use of real physical control systems.
Figure 7 shows an image of the computer animation of the Watt Governor control system, developed by a student in the 6th period of the Automatic Control History course. It is important to note that this student has only taken courses on modeling and analysis of control systems. Moreover, he has no theoretical knowledge about the design of control laws nor discretization of control systems yet. However, he is able to construct computational mimics from the understanding of the physics of the real system and its mathematical model. In addition, he has been able to connect the Matlab program with other applications for the animated digital object design in such a way as to be able to visualize both the traditional response dynamics of the signal (or variable) vs. time and the dynamics on the computer animation. Thus, evaluating a system with a behavior similar to reality through computer animation.
It should be noted that an animated digital object is not 100% comparable with a real physical system, because the real physical system will always have subsystems or supersystems, some components, disturbance signals, frictions between parts, among others, not considered in their representation in a computer animation. However, to avoid mathematical complexities, many of these features are also not fully incorporated into the mathematical models that represent the physical system. Just as there is parsimony in the mathematical modeling of physical control systems, this concept also applies to constructing computer animations of physical control systems.
Furthermore, it is essential to note that only performing analysis and design of control systems by students through traditional simulations and/or computer animations limits the student from the experience that he can (and should) acquire when interacting with real control systems. As mentioned above, unexpected or unconsidered situations arise that do not occur in the digital simulations’ world, which is one of the main disadvantages of distance education. This is the case of the Digital Control course, which requires within its contents the implementation of discretization techniques (sampling) in a real physical control system.
Finally, discussions were held with the students to understand better the advantages and challenges of deploying the computer education and project-learning strategies online. It could be observed that during the years prior to 2015, the students had some reluctance to carry out their activities using the ControlAnimation library, mainly at the beginning of the course. However, after applying this educational framework in the years 2020 and 2021, we noticed that students are much more open and motivated to use the ControlAnimation library to perform the different activities related to the course. In addition, they have been participative and motivated to create their own computer animations. We believe these are promising results due to technological advances that can be found nowadays in new animation software. This could help to make more accessible and intuitive to include computer animation strategies in online education, even for students of lower academic level, such as those of the 5th period of the control systems engineering program.
7. Conclusions
Education goes far beyond an infrastructure that delimits academic spaces, thus it is necessary to include as educational goals learning to know, learning to do, learning to live together and learning to be, as described by UNESCO. In recent years the educational system has started to use innovative learning tools, where the student is the center of the teaching and learning process, to overcome new education challenges of the 21st century, thus evolving from previous education strategies such as masterclasses where the professor was the center of the educational process to innovative ones, where the student is the center of the teaching and learning process. Furthermore, the COVID-19 pandemic generated an increased urgency to change educational ways. As a result, the teaching and learning process has ceased to be associated only with a physical space where learning happens in person and synchronously, but rather in various ways, including virtual spaces. Nowadays, Information and Communication Technologies (ICT) offer a wide range of new communication channels and easy-to-use technological tools to support this process.
Computer animation is a handy teaching tool that has shown feasibility in different fields and stages over the years. Particularly in the control systems engineering course at the University of Los Andes, where students have been able to connect the physics behavior of the control system with the mathematical model that represents it. The ControlAnimation library has been a supporting tool for implementing project-based learning strategies in the control systems courses at the University of Los Andes recently, especially since the beginning of the COVID-19 pandemic. Therefore, computer animation could be extended to other courses as an educational strategy, not only in the area of control systems or engineering in general but in other fields and levels of education.
Technological advances have allowed students from less advanced courses in control systems engineering to perform or develop computer animations that were possible only by very advanced students just a couple of decades ago. This has also allowed for a further understanding of theoretical principles, computational calculations, and connections between software.
The use of the ControlAnimation library deployed under project-based learning strategies in the control systems courses at the University of Los Andes will continue to be a promising subject of research. The target is to incorporate the use of ControlAnimation library in almost 100% in all the courses mentioned in this research work and continue evaluating students’ performance by using quantitative data collection techniques such as questionnaires. To this end, the education and evaluation strategies of the different course contents will continue to be adapted to innovative teaching and learning strategies, tailored to apply computer animation education online.
Currently, the term metaverse is already used to refer to a 3D virtual space that will simulate reality (or reality unattainable in the tangible physical world). It is said that it will be the future version of the internet, where encounters between people can take place through their avatars. Thus, today it might be feasible for us to ask the following questions:
- Can the educational future be in the metaverse?
- Will it be possible to teach virtually on the metaverse?
In that way, universities and students would find broader possibilities to adapt to a constantly changing world.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/educsci12040253/s1, Video S1 Watt Governor computer animation from the ControlAnimation library used to teach Control Systems courses at University of Los Andes and Document S2 showing the Mathematica software code to generate the Watt Governor computer animation.
Author Contributions
Conceptualization, A.P. software, A.P.; writing—original draft preparation, A.P.; writing—review and editing, A.P. and R.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
The authors acknowledge fruitful discussions with professors and students in the control system engineering courses at University of Los Andes. Jesús Rodríguez-Millán is acknowledged, who had the idea and proposed the ControlAnimation library framework in the year 2001.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Mourtzis, D. Simulation in the design and operation of manufacturing systems: State of the art and new trends. Int. J. Prod. Res. 2020, 58, 1927–1949. [Google Scholar] [CrossRef]
- Oztemel, E.; Gursev, S. Literature review of Industry 4.0 and related technologies. J. Intell. Manuf. 2020, 31, 127–182. [Google Scholar] [CrossRef]
- Tao, F.; Qi, Q.; Liu, A.; Kusiak, A. Data-driven smart manufacturing. J. Manuf. Syst. 2018, 48, 157–169. [Google Scholar] [CrossRef]
- Zhu, W.; Fan, X.; Zhang, Y. Applications and research trends of digital human models in the manufacturing industry. Virtual Real. Intell. Hardw. 2019, 1, 558–579. [Google Scholar] [CrossRef]
- Makhataeva, Z.; Varol, H.A. Augmented Reality for Robotics: A Review. Robotics 2020, 9, 21. [Google Scholar] [CrossRef] [Green Version]
- Piazza, C.; Grioli, G.; Catalano, M.G.; Bicchi, A. A Century of Robotic Hands. Annu. Rev. Control. Robot. Auton. Syst. 2019, 2, 1–32. [Google Scholar] [CrossRef]
- Pla-Castells, M.; García-Fernández, I.; Gimeno, J.; Ferrando, I. Computer Animation to teach interpolation. Model. Sci. Educ. Learn. 2019, 12, 31. [Google Scholar] [CrossRef] [Green Version]
- Marquez, R.; Tolosa, L.; Celis, M.T. Understanding COVID-19 effect on the U.S. supply chain of strategic products: Important factors, current situation, and future perspective. Cienc. Ing. 2021, 42, 53–62. [Google Scholar]
- Grodotzki, J.; Upadhya, S.; Tekkaya, A.E. Engineering education amid a global pandemic. Adv. Ind. Manuf. Eng. 2021, 3, 100058. [Google Scholar] [CrossRef]
- Maqsood, A.; Abbas, J.; Rehman, G.; Mubeen, R. The paradigm shift for educational system continuance in the advent of COVID-19 pandemic: Mental health challenges and reflections. Curr. Res. Behav. Sci. 2021, 2, 100011. [Google Scholar] [CrossRef]
- Vijayan, R. Teaching and learning during the covid-19 pandemic: A topic modeling study. Educ. Sci. 2021, 11, 347. [Google Scholar] [CrossRef]
- Loukomies, A.; Juuti, K. Primary students’ experiences of remote learning during covid-19 school closures: A case study of Finland. Educ. Sci. 2021, 11, 560. [Google Scholar] [CrossRef]
- Asgari, S.; Trajkovic, J.; Rahmani, M.; Zhang, W.; Lo, R.C.; Sciortino, A. An observational study of engineering online education during the COVID-19 pandemic. PLoS ONE 2021, 16, e0250041. [Google Scholar] [CrossRef]
- Moreland, A.; Herlihy, C.; Tynan, M.A.; Sunshine, G.; McCord, R.F.; Hilton, C.; Poovey, J.; Werner, A.K.; Jones, C.D.; Fulmer, E.B.; et al. Timing of State and Territorial COVID-19 Stay-at-Home Orders and Changes in Population Movement—United States, 1 March–31 May 2020. Morb. Mortal. Wkly. Rep. 2020, 69, 1198. [Google Scholar] [CrossRef]
- Fabris, C.P.; Rathner, J.A.; Fong, A.Y.; Sevigny, C.P. Virtual reality in higher education. Int. J. Innov. Sci. Math. Educ. 2019, 27, 69–80. [Google Scholar] [CrossRef]
- Patete, A.; Marquez, P.; Rodriguez-Millan, J. Modeling, simulation and animation of an arc reflex system. Cienc. Ing. 2015, 36, 61–72. [Google Scholar]
- Ribeiro, T.; Paiva, A. The Practice of Animation in Robotics. In Modelling Human Motion: From Human Perception to Robot Design; Noceti, N., Sciutti, A., Rea, F., Eds.; Springer: Cham, Switzerland, 2020; pp. 237–269. ISBN 978-3-030-46732-6. [Google Scholar]
- UNESCO. Moving Forward the 2030 Agenda for Sustainable Development. Available online: https://unesdoc.unesco.org/ark:/48223/pf0000247785 (accessed on 20 February 2022).
- Abdulwahed, M. Technology Innovation and Engineering’ Education and Entrepreneurship (TIEE) in Engineering Schools: Novel Model for Elevating National Knowledge Based Economy and Socio-Economic Sustainable Development. Sustainability 2017, 9, 171. [Google Scholar] [CrossRef] [Green Version]
- Tan, W.K.; Umemoto, M. International Industrial Internship: A Case Study from a Japanese Engineering University Perspective. Educ. Sci. 2021, 11, 156. [Google Scholar] [CrossRef]
- De Graaff, E.; Ravesteijn, W. Training complete engineers: Global enterprise and engineering education. Eur. J. Eng. Educ. 2001, 26, 419–427. [Google Scholar] [CrossRef]
- Marquez, R.; Tolosa, L.; Gómez, R.; Izaguirre, C.; Rennola, L.; Bullón, J.; Sandia, B. Reproducing an innovation environment in the classroom. An strategy to promote creativity in Chemical Engineering education. Educ. Quim. 2016, 27, 249–256. [Google Scholar]
- Tolosa, L.; Marquez, R.; Rennola, L.; Sandia, B.; Bullon, J. An overview of today’s project-based learning and how it has been implemented in the Chemical Engineering School at Universidad de Los Andes. Educ. Quím. 2018, 29, 36–48. [Google Scholar] [CrossRef]
- Hoffman, G.; Kubat, R.; Breazeal, C. A hybrid control system for puppeteering a live robotic stage actor. In Proceedings of the 17th IEEE International Symposium on Robot and Human Interactive Communication, Munich, Germany, 1–3 August 2008; pp. 354–359. [Google Scholar]
- LaViers, A.; Teague, L.; Egerstedt, M. Style-Based Robotic Motion in Contemporary Dance Performance. In Controls and Art; Inquiries at the Intersection of the Subjective and the Objective; LaViers, A., Egerstedt, M., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 205–229. ISBN 978-3-319-03904-6. [Google Scholar]
- Patete, A.; Rodríguez Millán, J. Los mímicos computacionales: Una herramienta docente para la enseñanza de la ingeniería de control. Acción Pedagóg. 2011, 20, 92–103. [Google Scholar]
- Rodríguez-Millán, J.; González, C.; Patete, A. Improved Non-Standard Discretization Methods for Nonlinear Dynamical Control Systems; Moreno Díaz, R., Pichler, F., Quesada Arencibia, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 608–613. [Google Scholar]
- Shimada, S.; Golyanik, V.; Xu, W.; Theobalt, C. PhysCap: Physically Plausible Monocular 3D Motion Capture in Real Time. ACM Trans. Graph. 2020, 39, 1–16. [Google Scholar] [CrossRef]
- Won, J.; Gopinath, D.; Hodgins, J. Control strategies for physically simulated characters performing two-player competitive sports. ACM Trans. Graph. 2021, 40, 1–11. [Google Scholar] [CrossRef]
- Patete, A. Desarrollo de un Mímico de un Sistema de Control en Mathematica; Universidad de Los Andes: Merida, Venezuela, 2002. [Google Scholar]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems: An Introduction with Applications; Isermann, R., Münchhof, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2011; ISBN 978-3-540-78879-9. [Google Scholar]
- Kerlow, I.V. The Art of 3D Computer Animation and Effects; John Wiley & Sons: Hoboken, NJ, USA, 2009; ISBN 0470084901. [Google Scholar]
- Garza Mireles, D. Animación digital y realidad virtual. Cienc. UANL 2014, 17, 58–62. [Google Scholar]
- Pausch, R.; Crea, T.; Conway, M. A Literature Survey for Virtual Environments: Military Flight Simulator Visual Systems and Simulator Sickness. Presence Teleoperators Virtual Environ. 1992, 1, 344–363. [Google Scholar] [CrossRef]
- Fussell, S.; Thomas, R. Interactive Modules for Flight Training: A Review. J. Aviat. Educ. Res. 2021, 30, 3. [Google Scholar] [CrossRef]
- Güler, K. Utilizing visitor simulations in exhibition design process: Evaluating designers’ perspectives. J. Simul. 2021, 2021, 1–14. [Google Scholar] [CrossRef]
- Klačková, I.; Kuric, I.; Zajačko, I.; Tlach, V.; Wiecek, D. Virtual reality in Industry. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1199, 12005. [Google Scholar] [CrossRef]
- Paszkiewicz, A.; Salach, M.; Dymora, P.; Bolanowski, M.; Budzik, G.; Kubiak, P. Methodology of Implementing Virtual Reality in Education for Industry 4.0. Sustainability 2021, 13, 5049. [Google Scholar] [CrossRef]
- Nogueira, J.R.; Alves, R.; Marques, P.C. Computational Programming as a Tool in the Teaching of Electromagnetism in Engineering Courses: Improving the Notion of Field. Educ. Sci. 2019, 9, 64. [Google Scholar] [CrossRef] [Green Version]
- Arnold, U.; Söbke, H.; Reichelt, M. SimCity in Infrastructure Management Education. Educ. Sci. 2019, 9, 209. [Google Scholar] [CrossRef] [Green Version]
- Cheng, K.W.; Chan, C.L. Remote Hardware Controlled Experiment Virtual Laboratory for Undergraduate Teaching in Power Electronics. Educ. Sci. 2019, 9, 222. [Google Scholar] [CrossRef] [Green Version]
- Mattila, A.; Martin, R.M.; DeIuliis, E.D. Simulated Fieldwork: A Virtual Approach to Clinical Education. Educ. Sci. 2020, 10, 272. [Google Scholar] [CrossRef]
- Agbo, F.J.; Sanusi, I.T.; Oyelere, S.S.; Suhonen, J. Application of Virtual Reality in Computer Science Education: A Systemic Review Based on Bibliometric and Content Analysis Methods. Educ. Sci. 2021, 11, 142. [Google Scholar] [CrossRef]
- Dell’Aquila, E.; Vallone, F.; Zurlo, M.C.; Marocco, D. SG-ACCORD: Designing Virtual Agents for Soft Skills Training in the School Context. Educ. Sci. 2022, 12, 174. [Google Scholar] [CrossRef]
- Rivas-Echeverria, F.; Rios-Bolivar, A.; Casales-Echeverria, J. Neural network-based auto-tuning for PID controllers. Neural Netw. World 2001, 11, 277–284. [Google Scholar]
- Patete, A. Visualización de Dinámicas no Lineales Mediante Mímicos Computacionales en Mathematica; Universidad de Los Andes: Merida, Venezuela, 2005. [Google Scholar]
- Rodríguez-Millán, J.; Patete, A. 3D-Simulations in Linear and Nonlinear Dynamical Control Systems Through Computer Animated Mimics. In Proceedings of the 9th International Conference on Computer Aided Systems Theory EUROCAST 2003, Las Palmas de Gran Canarias, Spain, 24–28 February 2003; pp. 192–195. [Google Scholar]
- Rodríguez-Millán, J.; Patete, A. Visualización Tridimensional de Sistemas de Control Mediante Mímicos en Mathematica. In Proceedings of the IV Congreso de Control y Automatización CAC 2003, Merida, Venezuela, 12–14 November 2003. [Google Scholar]
- Chacon, J.; Besada-Portas, E.; Carazo-Barbero, G.; Lopez-Orozco, J.A. Enhancing EJsS with Extension Plugins. Electronics 2021, 10, 242. [Google Scholar] [CrossRef]
- Flores, M.; Payá, L.; Valiente, D.; Gallego, J.; Reinoso, O. Deployment of a Software to Simulate Control Systems in the State-Space. Electronics 2019, 8, 1205. [Google Scholar] [CrossRef] [Green Version]
- Mejías, A.; Herrera, R.S.; Márquez, M.A.; Calderón, A.J.; González, I.; Andújar, J.M. Easy Handling of Sensors and Actuators over TCP/IP Networks by Open Source Hardware/Software. Sensors 2017, 17, 94. [Google Scholar] [CrossRef] [Green Version]
- Rodríguez-Millán, J.; Patete, A.; González, C. Picard Discretization of Nonlinear Systems: Symbolic or Numeric Implementation? Moreno Díaz, R., Pichler, F., Quesada Arencibia, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 121–129. [Google Scholar]
- Patete, A.; Velasco, M.; Rodriguez-Millan, J. Validation of the Non-Standard Discretization Methods Case of Study: The Simple Pendulum. In Proceedings of the 9th WSEAS International Conference on Computational Intelligence, Man-Machine Systems and Cybernetics, Merida, Venezuela, 14–16 December 2010; World Scientific and Engineering Academy and Society (WSEAS): Stevens Point, WI, USA, 2010; pp. 123–130. [Google Scholar]
- Patete, A.; Iñaki, A.; Sanchez, H. Control de un pendulo invertido basado en un modelo reducido. Rev. Ing. UC 2011, 18, 12–22. [Google Scholar]
- Furuta, K.; Sano, A.; Atherton, D.P. State Variable Methods in Automatic Control; John Wiley & Son Limited: Hoboken, NJ, USA, 1988; ISBN 0471918776. [Google Scholar]
- Ogata, K. System Dynamics, 4th ed.; Prentice Hall: Hoboken, NJ, USA, 2004. [Google Scholar]
- Coronado, J.M.; Moyano, A.; Romero, V.; Ruiz, R.; Rodríguez, J. Student Long-Term Perception of Project-Based Learning in Civil Engineering Education: An 18-Year Ex-Post Assessment. Sustainability 2021, 13, 1949. [Google Scholar] [CrossRef]
- Khandakar, A.; Chowdhury, M.E.; Gonzales, A.J.S.P.; Touati, F.; Emadi, N.A.; Ayari, M.A. Case Study to Analyze the Impact of Multi-Course Project-Based Learning Approach on Education for Sustainable Development. Sustainability 2020, 12, 480. [Google Scholar] [CrossRef] [Green Version]
- Nielsen, N.M. Problem-Oriented Project Learning as a First Year Experience: A Transformative Pedagogy for Entry Level PPL. Educ. Sci. 2020, 10, 6. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, S.; Dinis-Carvalho, J.; Ferreira-Oliveira, A.T. Improving the Performance of Student Teams in Project-Based Learning with Scrum. Educ. Sci. 2021, 11, 444. [Google Scholar] [CrossRef]
- Mou, T.-Y. Students’ Evaluation of Their Experiences with Project-Based Learning in a 3D Design Class. Asia Pac. Educ. Res. 2020, 29, 159–170. [Google Scholar] [CrossRef]
- Delors, J. The treasure within: Learning to know, learning to do, learning to live together and learning to be. What is the value of that treasure 15 years after its publication? Int. Rev. Educ. 2013, 59, 319–330. [Google Scholar] [CrossRef]
- UNESCO. World Declaration on Higher Education for the Twenty-First Century: Vision and Action. Available online: https://unesdoc.unesco.org/ark:/48223/pf0000141952 (accessed on 2 February 2022).
- Fernandes, F.A.O.; Fuchter, N., Jr.; Daleffe, A.; Fritzen, D.; de Sousa, R.J.A. Integrating CAD/CAE/CAM in Engineering Curricula: A Project-Based Learning Approach. Educ. Sci. 2020, 10, 125. [Google Scholar] [CrossRef]
- Merma-Molina, G.; Gavilán-Martín, D.; Baena-Morales, S.; Urrea-Solano, M. Critical Thinking and Effective Personality in the Framework of Education for Sustainable Development. Educ. Sci. 2022, 12, 28. [Google Scholar] [CrossRef]
- Puertas-Aguilar, M.-Á.; Álvarez-Otero, J.; de Lázaro-Torres, M.-L. The Challenge of Professor Training in the 2030 Agenda Framework Using Geotechnologies. Educ. Sci. 2021, 11, 381. [Google Scholar] [CrossRef]
- UNESCO. Engineering: Issues, Challenges and Opportunities for Development. Available online: http://unesdoc.unesco.org/images/0018/001897/189753e.pdf (accessed on 5 December 2021).
- Hernandez-de-Menendez, M.; Díaz, C.A.E.; Morales-Menendez, R. Educational experiences with Generation Z. Int. J. Interact. Des. Manuf. 2020, 14, 847–859. [Google Scholar] [CrossRef]
- Wang, Y.-H. Integrating Games, e-Books and AR Techniques to Support Project-based Science Learning. Educ. Technol. Soc. 2020, 23, 53–67. [Google Scholar]
- Murillo-Zamorano, L.R.; Sánchez, J.Á.L.; Godoy-Caballero, A.L. How the flipped classroom affects knowledge, skills, and engagement in higher education: Effects on students’ satisfaction. Comput. Educ. 2019, 141, 103608. [Google Scholar] [CrossRef]
- Pokhrel, S.; Chhetri, R. A Literature Review on Impact of COVID-19 Pandemic on Teaching and Learning. High. Educ. Future 2021, 8, 133–141. [Google Scholar] [CrossRef]
Figure 1.
ControlAnimation library command in Mathematica software (version 8.0), Wolfram, Oxfordshire, UK.
Figure 1.
ControlAnimation library command in Mathematica software (version 8.0), Wolfram, Oxfordshire, UK.

Figure 3.
Capture of a sequence of the Inverted Pendulum computer animation. (a–f) Position change of the mimic as a function of time (in some seconds). Reproduced from [51].
Figure 3.
Capture of a sequence of the Inverted Pendulum computer animation. (a–f) Position change of the mimic as a function of time (in some seconds). Reproduced from [51].

Figure 4.
Physical pendulum diagram, analogous to the patellar SLR. Reproduced from [16].
Figure 4.
Physical pendulum diagram, analogous to the patellar SLR. Reproduced from [16].

Figure 5.
System Identification course: Percentage of students’ use of the ControlAnimation library in their activities and average grades over the past few years.
Figure 5.
System Identification course: Percentage of students’ use of the ControlAnimation library in their activities and average grades over the past few years.

Figure 6.
Physics Systems Modelling course: Percentage of students’ use of the ControlAnimation library in their activities and average grades over the past few years.
Figure 6.
Physics Systems Modelling course: Percentage of students’ use of the ControlAnimation library in their activities and average grades over the past few years.

Figure 7.
Watt Governor computer animation built by a student of the 6th period of the Control Systems courses at the University of Los Andes.
Figure 7.
Watt Governor computer animation built by a student of the 6th period of the Control Systems courses at the University of Los Andes.

Table 1.
Conceptual framework of Control Systems Engineering courses.
| Course | Level | Objectives |
|---|---|---|
| Physics Systems Modelling Classroom hours: 4 h Simulation laboratory hours: 1 h Academic units: 4 | 5th period |
|
| Automatic Control History (Elective Course) Classroom hours: 3 h Simulation laboratory hours: 2 h Academic units: 4 | 6th period |
|
| System Identification Classroom hours: 4 h Simulation laboratory hours: 2 h Academic units: 5 | 8th period |
|
| Digital Control Classroom hours: 4 h Simulation laboratory hours: 2 h Physics control process laboratory hours: 2 h Academic units: 6 | 9th period |
|
| Robust Control (Elective Course) Classroom hours: 3 h Simulation laboratory hours: 2 h Academic units: 4 | 8th or 9th period |
|
Table 2.
Traditional learning strategies in Control Systems Engineering courses.
| Course Name | Teaching Goals | Traditional Learning Strategies | Evaluation | Expected Competencies Students at the End of the Course |
|---|---|---|---|---|
| Physics Systems Modelling | Teaching basic physical laws, including some techniques for constructing formal mathematical models of physical systems. Providing the basic knowledge to represent and understand, through mathematical models, the behavior of physical systems. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor explains to students the step-by-step solution of mathematical exercises based on the contents of the course. (3) The professor shows the different behaviors of the control systems studied through the traditional simulation (variable of interest vs. time). |
|
|
| Automatic Control History (Elective Course) | Teaching the evolution of control systems from the Greeks to the present day, where each advance is based on the mathematics of control systems theory and technology at the time. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor shows the most relevant control systems throughout history and their main contributions to control theory supported by images. |
|
|
| System Identification | Teaching how to use the different techniques and calculation tools to obtain a physical control system mathematical model experimentally, e.g., using the input-output data of the control system. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) Use of traditional calculation tools, which are shown and explained by the professor. |
|
|
| Digital Control | The professor must show and teach to use the different techniques and tools of calculation for the analysis and design of linear control systems in discrete time. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor explains to the students the step-by-step solution of mathematical problems, based on the contents of the course. (3) The professor explains the step-by-step implementation of discretization techniques in a real physical system. |
|
|
| Robust Control (Elective Course) | Teaching the different techniques and calculation tools for analyzing and designing control systems in their practical performance, operating in restrictive, uncertain and limiting conditions. This is performed in such a way that the control system can satisfy the operating criteria despite the disturbances present in the system. |
(1) The professor is responsible for preparing the content and material of all classes. Classes are shown and explained to students. (2) The professor explains the step-by-step solution of mathematical problems to the students, based on the course contents. (3) The professor shows the changes in a control system with uncertainties through traditional input-output graphs. (4) The professor shows how the design of a robust controller can act in the presence of a disturbance and continue to control the system to the desired conditions, through traditional input-output graphs. |
|
|
Table 3.
Project-based learning strategies applied in Control Systems Engineering courses.
| Course Name | Teaching Goals | Traditional Learning Strategies | Evaluation | Expected Competencies Students at the End of the Course |
|---|---|---|---|---|
| Physics Systems Modelling | (1) Have all the knowledge competencies and teaching skills explained in Table 2 (teaching goals part) on the contents, according to the corresponding course. (2) Know how to play the tutor’s role, making individual advice when the students require it. (3) Motivate students to relate control theory and its application to the control systems studied and connect mathematics with physics. (4) Emphasize open-ended questions to promote discussion rather than focusing on one type of answer question about knowledge. (5) Guide or direct the discussions in such a way that knowledge about all the contents of the course is covered. | (1) Active-Learning: Students become protagonists and individually or collaboratively manipulate the ControlAnimation library. This is performed by changing the parameters of the system’s mathematical model to observe the dynamics through traditional simulation (variable of interest vs. time) and by following the control system’s computer animation behavior. (2) Visualizing Systems Thinking: students visualize the dynamics (behavior) of the control theory techniques in the proposed exercises, using the ControlAnimation library. | Project-based evaluation: According to the course and its content, the evaluation is performed through a specific rubric for each project.
| (1) They must acquire all the skills described in Table 2 (expected competencies students at the end of the course part), according to the corresponding course. (2) Apply the ability to analyze and synthesize information critically. (3) Acquire and apply research skills. (4) To associate the theoretical knowledge acquired, according to the course, with the real structure and behavior of physical systems. (5) Develop autonomous work and be active students in the learning processes. (6) Develop more creative skills. |
| Automatic Control History (Elective Course) | (1) Problem-Solving: students individually or collaboratively choose a control system that has been representative in the history of automatic control (for example, the Watt Governor). Then, students build a computer animation of the chosen control system using the new technologies currently available. Thus, they must understand their physical functioning, limitations, the mathematical model, parameters, and dynamics. (2) Active-Learning: students become protagonists and individually or collaboratively manipulate the ControlAnimation library or other open-source computer animation programs to develop a computer animation of the chosen control system. (3) Visualizing Systems Thinking: the built computer animation must be able to reproduce the control system dynamics according to the given model parameters. | |||
| System Identification | (1) Active-Learning: students individually or collaboratively apply identification techniques to the input-output data obtained from computer animation, using the ControlAnimation library, and build the mathematical model representing the physical system. (2) Visualizing Systems Thinking: students validate their models’ behavior with the dynamic behavior of the computer animation under study, using the ControlAnimation library. | |||
| Digital Control | (1) Active-Learning: students, individually or collaboratively, apply the sampling techniques to the control systems of the ControlAnimation library. (2) Visualizing Systems Thinking: students analyze the effects of the sampling period, T0, on the dynamics of the sampled system by observing the traditional discrete graphs (variable of interest vs. time) and the dynamic behavior of the computer animation using the ControlAnimation library. (3) Problem-Solving: students design the digital control laws and observe the dynamics of the controlled system in the same way. Supported by the ControlAnimation library, students can analyze and design control laws for control systems commonly studied in control theory. (4) Experiential Activities and Case-Study: students implement a real system that is carried out according to the availability of real physical control systems in the laboratory. | |||
| Robust Control (Elective Course) | (1) Active-Learning: students, individually or collaboratively, manipulate the existing parameter values of models in the ControlAnimation library, to recreate perturbations of the parametric type. (2) Visualizing Systems Thinking: students observe the computer animation’s dynamic behavior in the presence of these perturbations using the ControlAnimation library. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Patete, A.; Marquez, R. Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic. Educ. Sci. 2022, 12, 253. https://doi.org/10.3390/educsci12040253
AMA Style
Patete A, Marquez R. Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic. Education Sciences. 2022; 12(4):253. https://doi.org/10.3390/educsci12040253
Chicago/Turabian StylePatete, Anna, and Ronald Marquez. 2022. "Computer Animation Education Online: A Tool to Teach Control Systems Engineering throughout the COVID-19 Pandemic" Education Sciences 12, no. 4: 253. https://doi.org/10.3390/educsci12040253
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.