The electric power system consists of both power production and distribution, which is the power generation on the users load demand. As a result of globalization and technological advancement, the demand for electricity from customers is accumulating daily. To fulfill load demand, the generating capacity is increased by constructing new power plants and upgrading existing ones. When implementing a sophisticated power network, the power grid has several issues, such as voltage and frequency deviation. Consumers use electricity in a nonlinear manner. As a result, the power production varies proportionally with load demand to ensure system performance stability. When a system or any interconnected system has a rapid increase in power demand, it impacts the stability of the whole power-generating unit.
1.1. Literature Review
To solve the LFC crisis of interconnected thermal power systems, [
3] proposed a PSO-PID controller. The superiority of the projected controller was evident when its performance was compared to the performance of the hill climbing (HC)- and genetic algorithm (GA)-tuned controllers. The author [
4], used the ant colony optimization (ACO) technique with the PID controller for a standalone nuclear power plant LFC and the response was compared using the trial and error method. The GA–PID controller was applied [
5] for the LFC of an isolated thermal power plant. The superiority of the PID controller performance was exposed relative to the proportional integral (PI) controller. The AGC of the grid-connected power network was investigated by applying the hybrid fractional order fuzzy intelligent controller (FOFP-PID). Additionally, its supremacy was examined by comparing its performance with fractional order PID (FOPID) [
6]. The PID controller was tuned using the search group algorithm (SGA) to overcome the AGC emergency of an interconnected power system in [
7].
A hybrid GA (hGA) with the PSO technique was utilized to improve the AGC of the grid-connected system during an emergency loading in the power-generating unit [
8]. Load frequency control of multi-source power system is examined by applying differential evolution algorithm tuned parameters based controller [
9]. A PI Controller is designed for single area power system frequency control, gain value of controller is tuned by Stochastic Particle Swarm Optimization [
10]. The authors of [
11] developed a super twisting sliding mode controller (ST-SMC) for an LFC interconnected thermal power system to boost system efficiency during sudden load demand situations. The authors of [
12] developed a hybrid many optimizing liaisons–gravitational search algorithm (hMOL–GSA)-based fuzzy PID (FPID) which was studied for the AGC of an interlinked thermal power plant. The ACO–PID controller was proposed for a single-area non-reheated thermal power plant by [
13] to improve the system performance, [
14] developed a hybrid fuzzy PID (hFPID) controller that was for the LFC crisis of a grid-connected power network. The authors of [
15] applied a bacterial foraging (BF)-optimized fractional order fuzzy PID (FOFPID) controller for the LFC of several interconnected sources for electricity and its performance was compared with conventional and FPID controllers. The authors of [
16] proposed the moth flame optimization (MFO)–proportional integral double derivative (PIDD) controller for rectifying the AGC of a grid-connected power network that included thermal, hydro, and nuclear power units.
The PSO technique associated with the BF-optimized PID controller was designed for solving the LFC for interconnected power networks, which included thermal and PV [
17]. The PSO-associated multi-agent reinforcement learning (MARL) approach was implemented for the LFC of a grid-connected power network [
18]. The authors of [
19] designed the grasshopper optimization algorithm (GOA)-tuned fuzzy proportional derivative–fuzzy proportional integral (FPD–FPI) controller which was proposed for the AGC of a grid-connected power-generating unit consisting of a thermal power-generating unit with renewable energy resources, mainly wind and solar power units. The authors of [
20] developed the adaptive artificial neural network (ANN)-based PID controller that was designed for the LFC of a thermal unit which was incorporated with different DG includes wind turbine generators (WTGs), battery energy storage system (BESS), aqua electrolyzer (AE), diesel engine generators (DEGs), and fuel cells (FCs).
A chaos-based firefly algorithm-regulated PID controller was applied for the LFC of an interlinked power network [
21]. The authors of [
22] developed the lion algorithm (LA) to optimize the controller gain of the FOPI controller for resolving LFC issues in a grid-connected power network. An I-PD controller was proposed to overcome the AGC problem of a three-area power grid, with the gain of the controller found using the fitness dependent optimizer (FDO) technique [
23]. A novel technique, called Harris–Hawks optimization (HHO), was developed by [
24] for a tilt integral derivative + filter (TID + F) controller and it was applied for an interlinked power network LFC with many DC power-generating units. [
25], considered the shuffled frog-leaping algorithm (SFLA) for the LFC in a two-area interlinked power network with a PID controller. A Hybrid PSO algorithm is utilized for in-depth analysis of the energy deduction test statistic in radio network [
26].
The researcher in [
27] implemented the coordinative optimization technique in a microgrid for minimizing the operation cost for scheduling the behavior of components in the microgrid and its performance was compared with traditional approaches, mainly the day-ahead economical dispatch strategy and heuristic logic algorithm, which proved the supremacy of the proposed technique. A hybrid algorithm was suggested by [
28] for solving distributed storage allocation problems for minimizing storage costs. By applying the proposed technique, the cost of network resources and storage were effectively minimized. The authors of [
29] suggested a machine learning algorithm (MLA) for analyzing the data collected by using the Internet of Things used in healthcare systems and smart cities. The major need for analyzing the data was to derive useful inferences from the analysis. K means algorithms were applied for obtaining a superior clustering performance by [
30], and the performance of the proposed technique was confirmed by conducting various test analyses. Finally, the result analysis shows that it yields lesser execution time with superior clustering fitness and lesser sum of squared errors (SSE) over other algorithm techniques. The authors of [
31] applied the flower pollination algorithm (FPA) to optimize the PID controller gain parameters of LFC issues in the interlinked power grid and the result was compared to the ones of the GA–PID and PSO–PID controllers to confirm the supremacy of the proposed FPA technique. The firefly algorithm was used by [
32] to perform the AGC in a five-area power system and the performance was analyzed for the firefly algorithm (FFA)–PID controller against the responses with the GA–PID and PSO–PID controllers. The authors of [
33] discussed the PSO-optimized PID regulator for a single area power grid LFC problem. Using a PSO optimization technique with four distinct cost functions, a PID controller was built for the LFC of an isolated power network. The authors of [
34] explored a freestanding multiple source power system with the aid of a PSO–PID controller, and compared the results with the ones of a conventional technique. The author designed and developed a hybrid PSO–GSA algorithm-tuned PID controller for frequency regulation of an independent microgrid system. Additionally, the behavior of the proposed method was evaluated by comparing the response with PSO-tuned controller performance [
35]. A fractional order controller was designed and applied in shipboard microgrids for the regulation of system frequency and gain values of compellers were tuned by utilizing a direct search algorithm. Further, effectiveness was evaluated by applying parameter variations and a time delay [
36]. In [
37] a fractional order fuzzy controller was developed and implemented in hybrid power systems (renewable power). The performance was evaluated by comparing the response with the PID controller and fractional order PID controller. Frequency improvement and regulation of a dual-area interconnected power system was studied by considering a PSO-tuned fuzzy FOPI–FOPD controller in [
38]. The authors designed a movable damped wave algorithm-tuned FOPID controller and applied it in an interconnected multi-area power system for load frequency regulation of the system. In this work, renewable energy resources were also considered [
39]. A hybrid microgrid power generating system frequency controller was analyzed by considering an optimal fuzzy PIDF controller in [
40].
The literature review successfully suggests that the power system performance oscillates and is affected due to unexpected load demands in the power-generating unit. Due to this, LFC/AGC issues can occur in the power system. These issues are overcome by applying many optimization techniques in different controllers to optimize their gain under different situations and criterion [
3,
4,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28,
29,
30,
31,
32,
33,
34]. A summary of the literature review is tabulated in
Table 1.
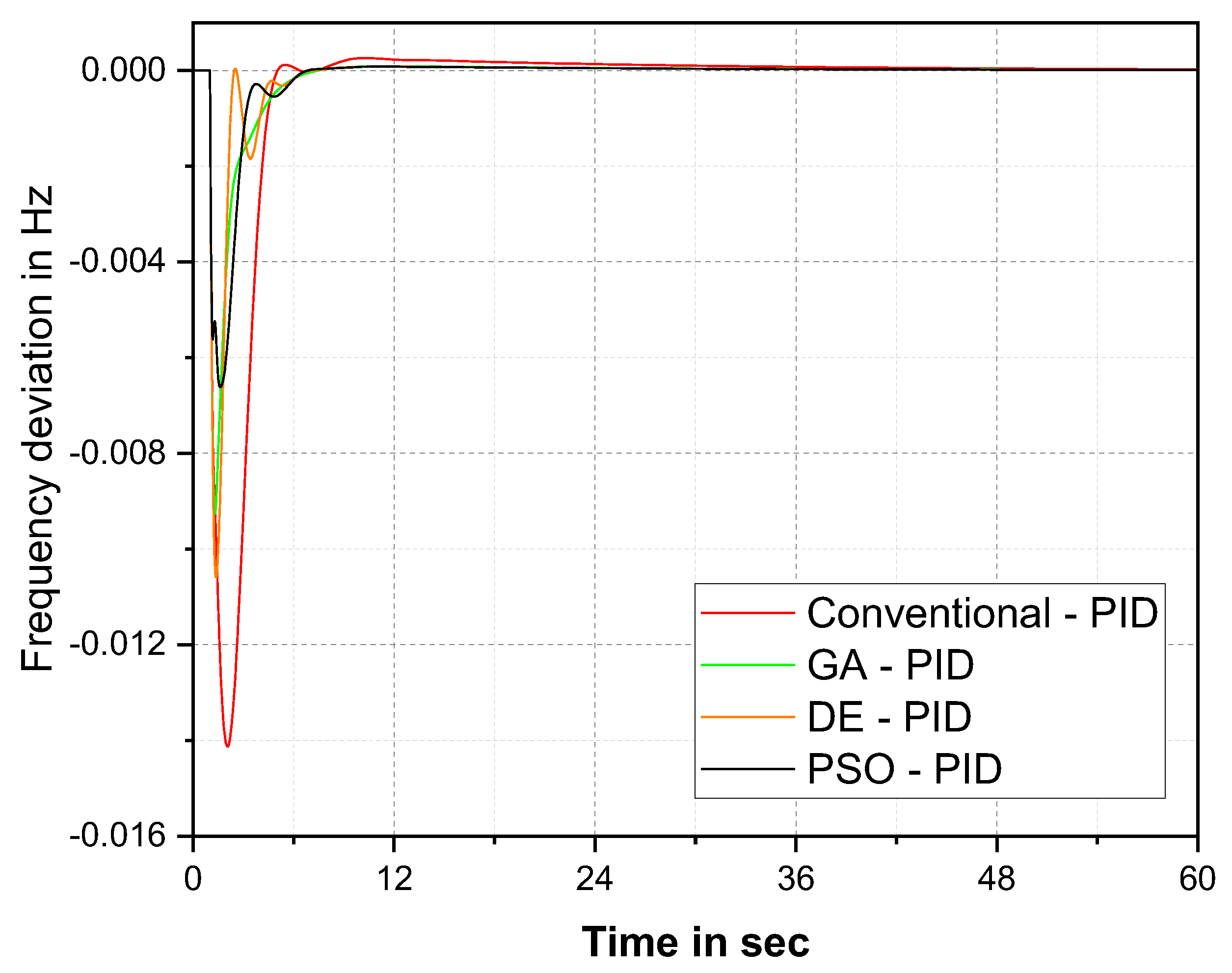
The above table provides a description of the literature related to the proposed work and it shows that numerous professionals use the PSO optimization method to tune the controller gain settings. In addition, a secondary PID controller was constructed for the proposed power system. The PSO outcomes in comparison to other prevalent approaches, such as the conventional, GA, and DE algorithm, was performed to prove its supremacy. The major advantage of PSO is that it can avoid premature convergence to local minima and also provide high-quality solutions. The main advantage of PSO is that it requires fewer parameters to tune. PSO obtains the best solution from particle interactions with a high-dimensional search space.
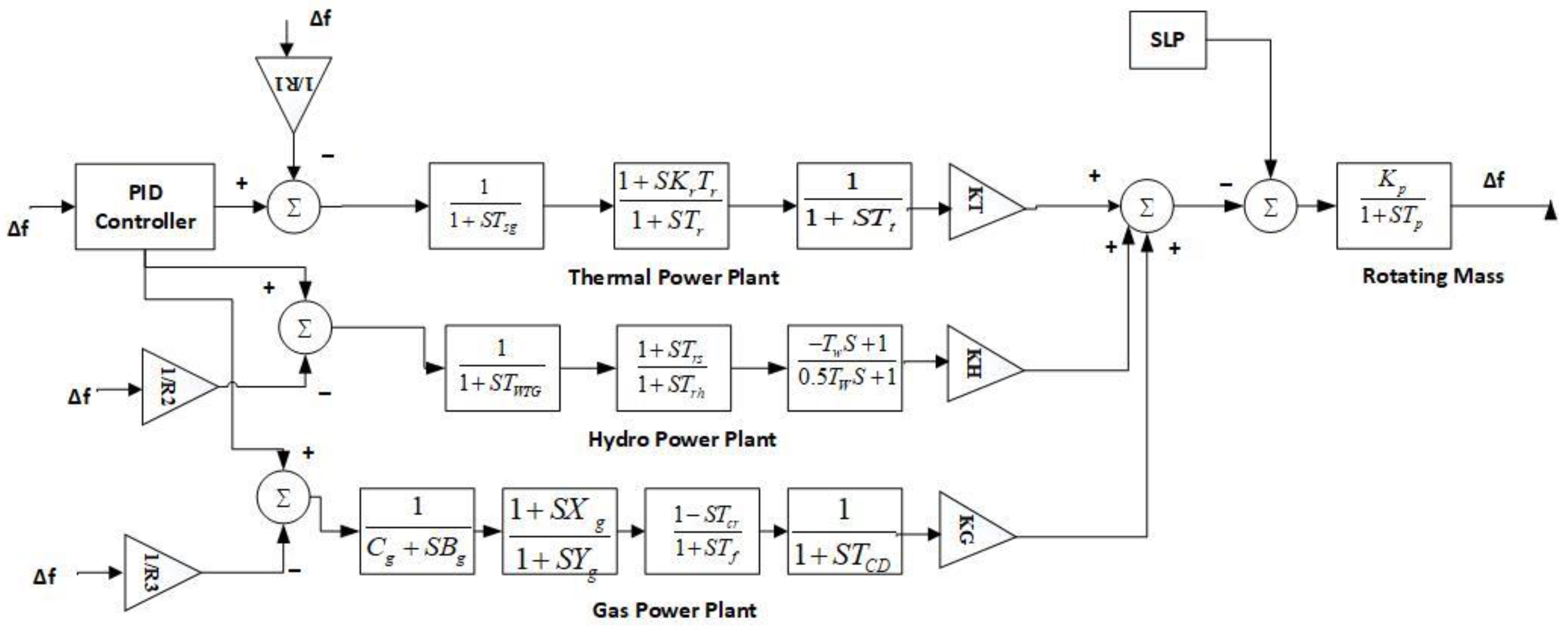
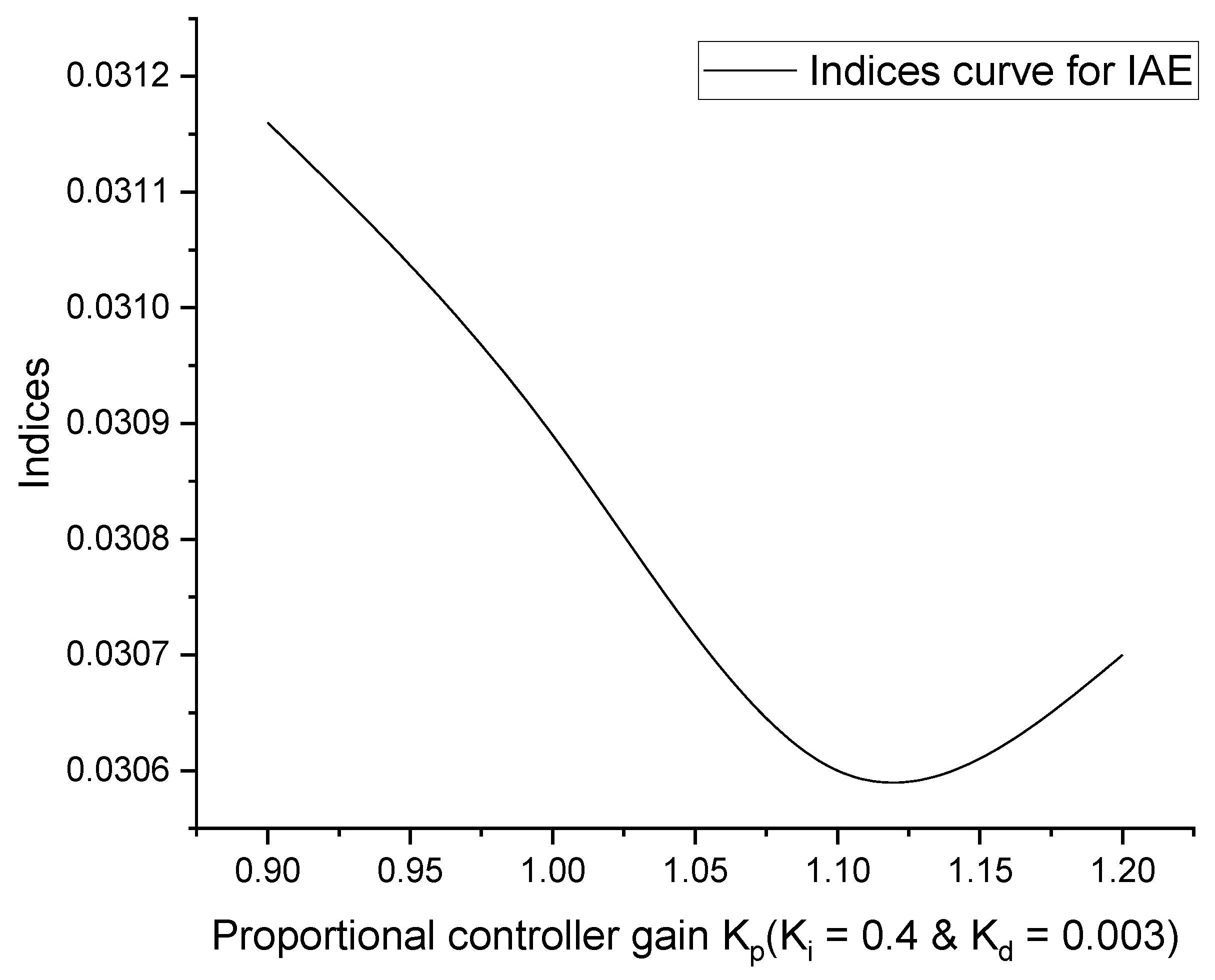
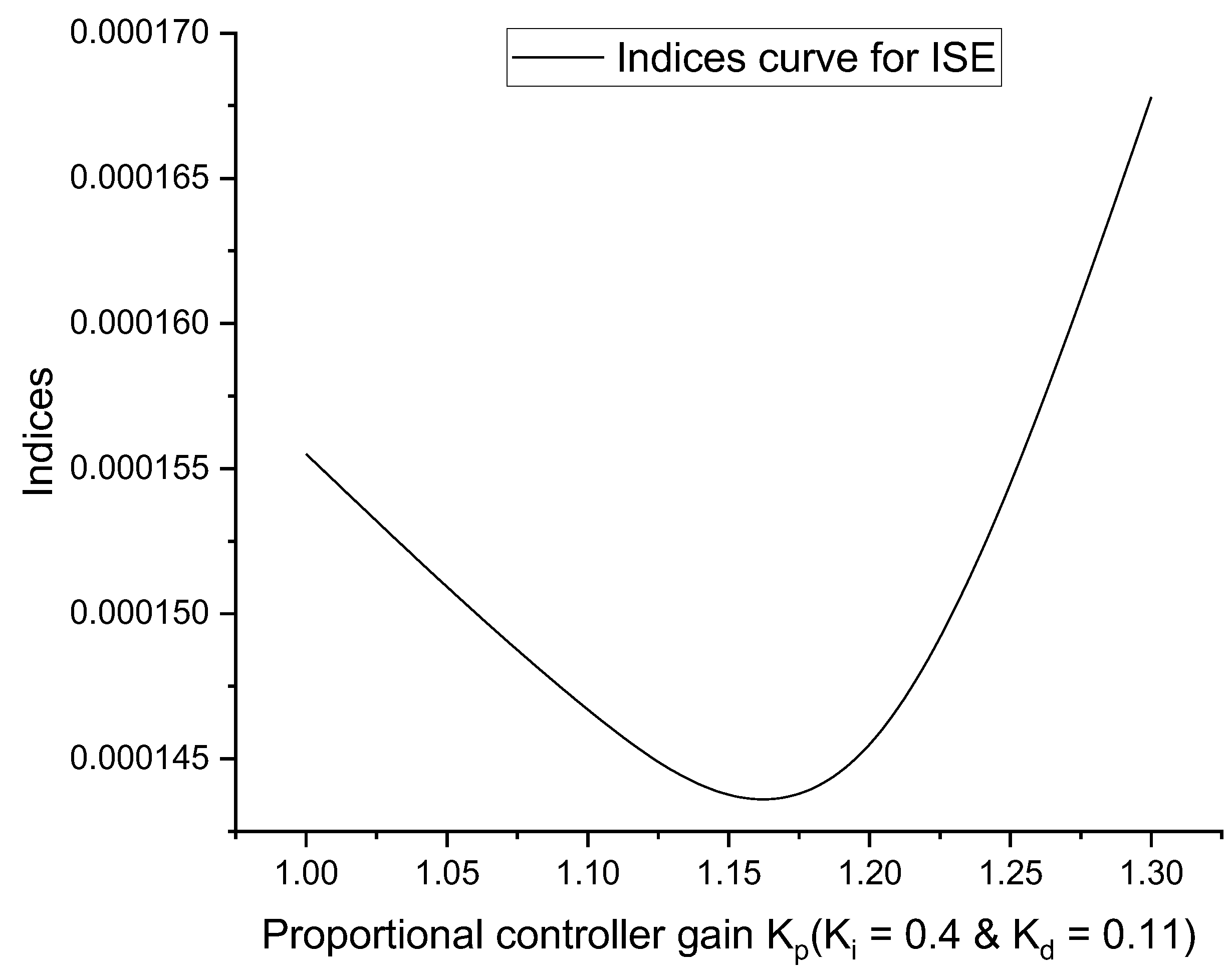
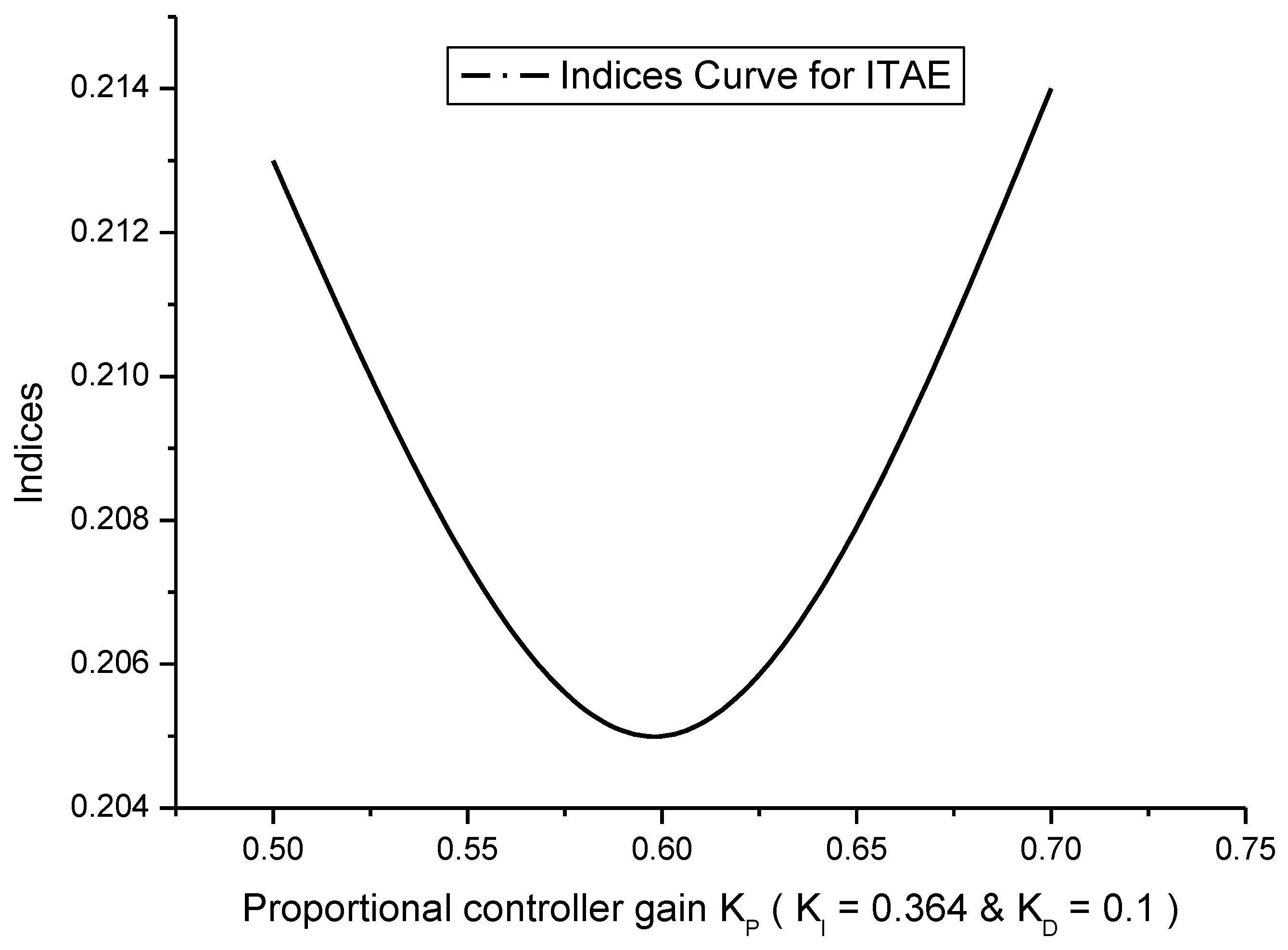
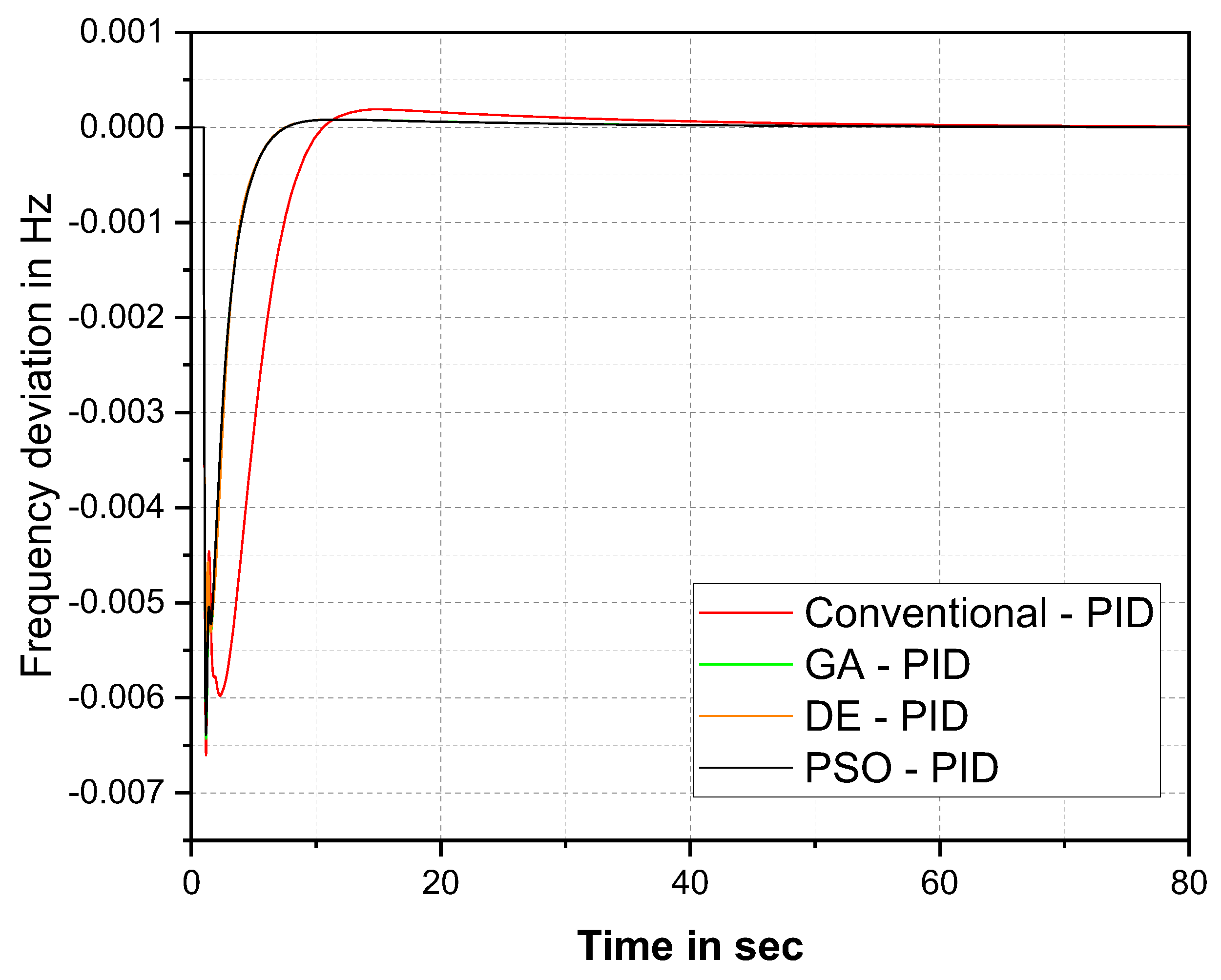
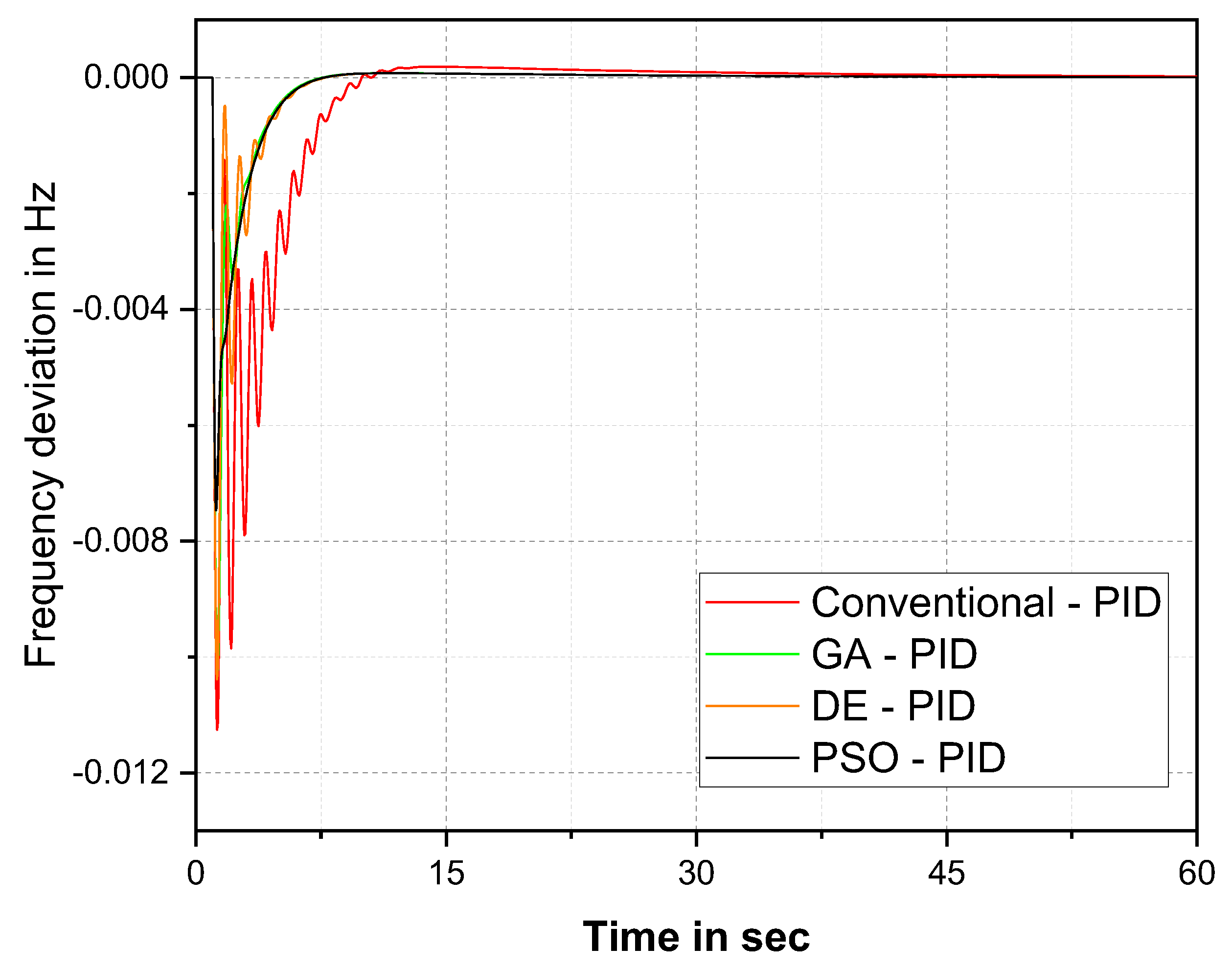
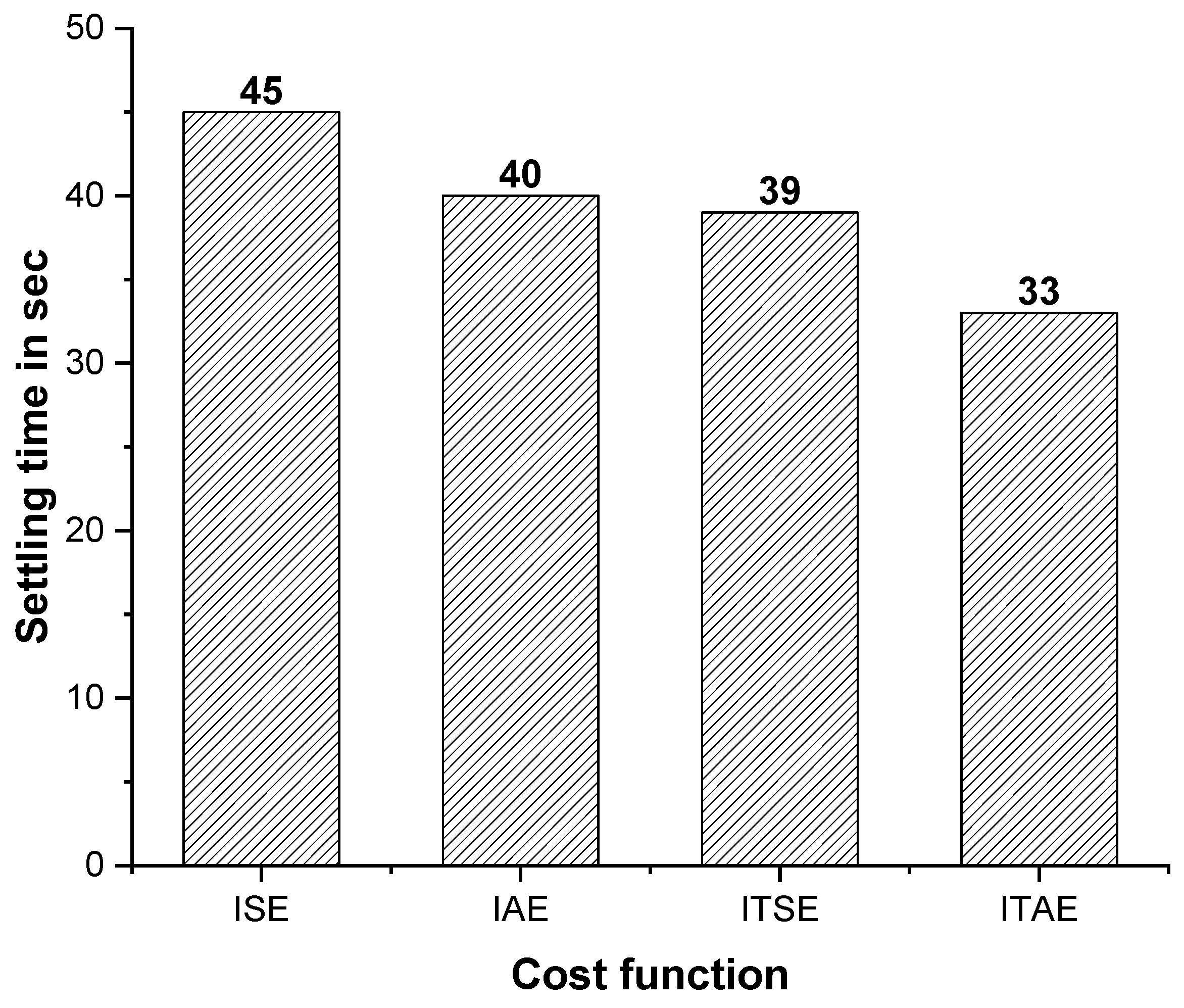
The PSO–PID controller was employed in this study with different cost functions. The system’s performance was evaluated by comparing its response to one of a conventional-, genetic algorithm- and differential evolution algorithm-tuned PID controller for an identical power system. The primary goal and motivation for this study were to advance the performance of the proposed system and maintain system stability in critical situations to provide high-quality power to all consumers. To improve the system parameters, a PSO-tuned PID controller was used with four different cost functions to overcome the crisis. The PSO–PID response was also examined by comparing it to conventional-, GA- and DE-based PID controller responses under the same criterion.


 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}