
Dynamic Characteristics and Working Modes of Permanent Magnet Electrodynamic Suspension Vehicle System Based on Six Wheels of Annular Halbach Structure

Abstract
:1. Introduction
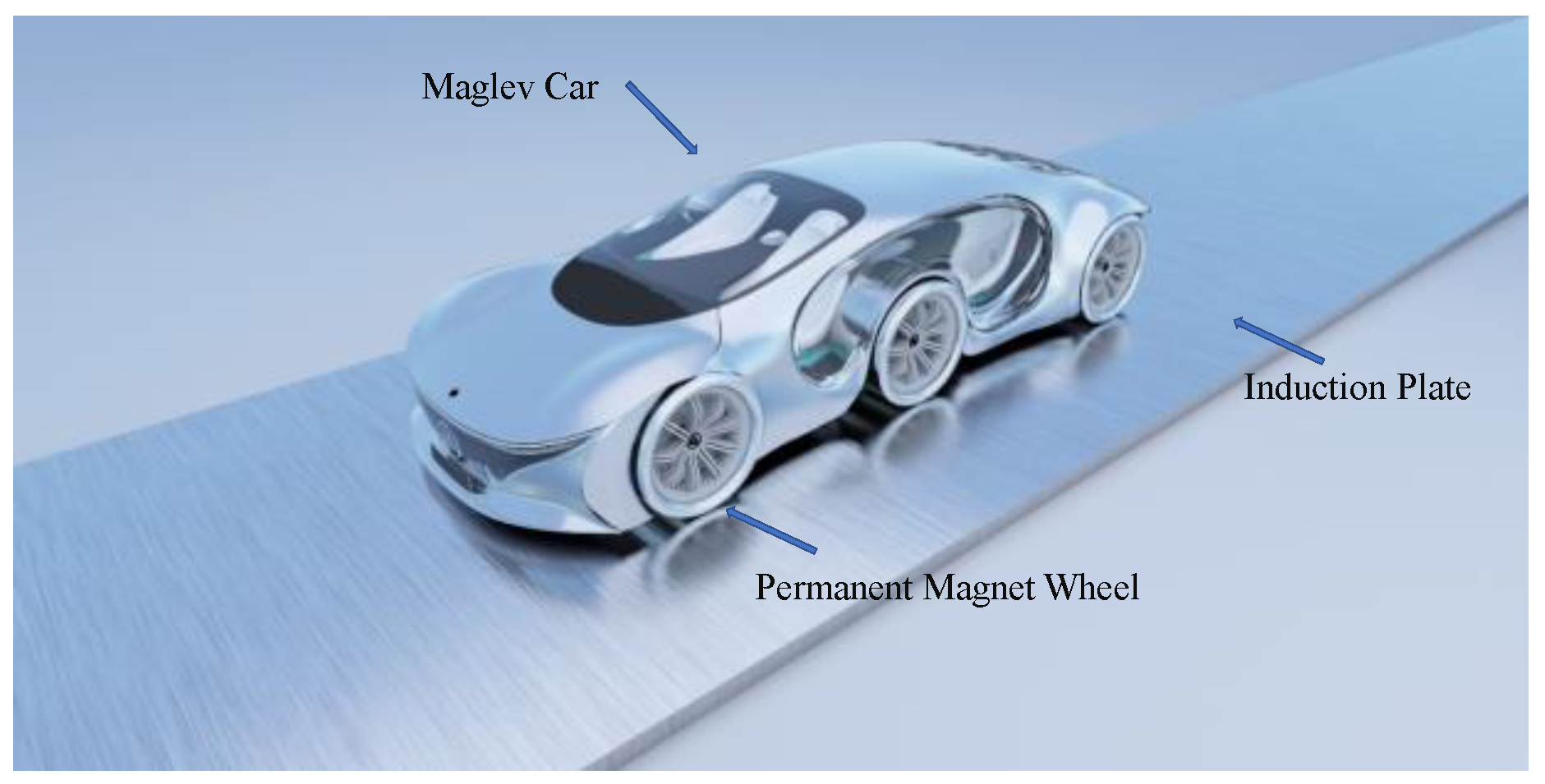
2. Structural Design
3. Principle of the Operation
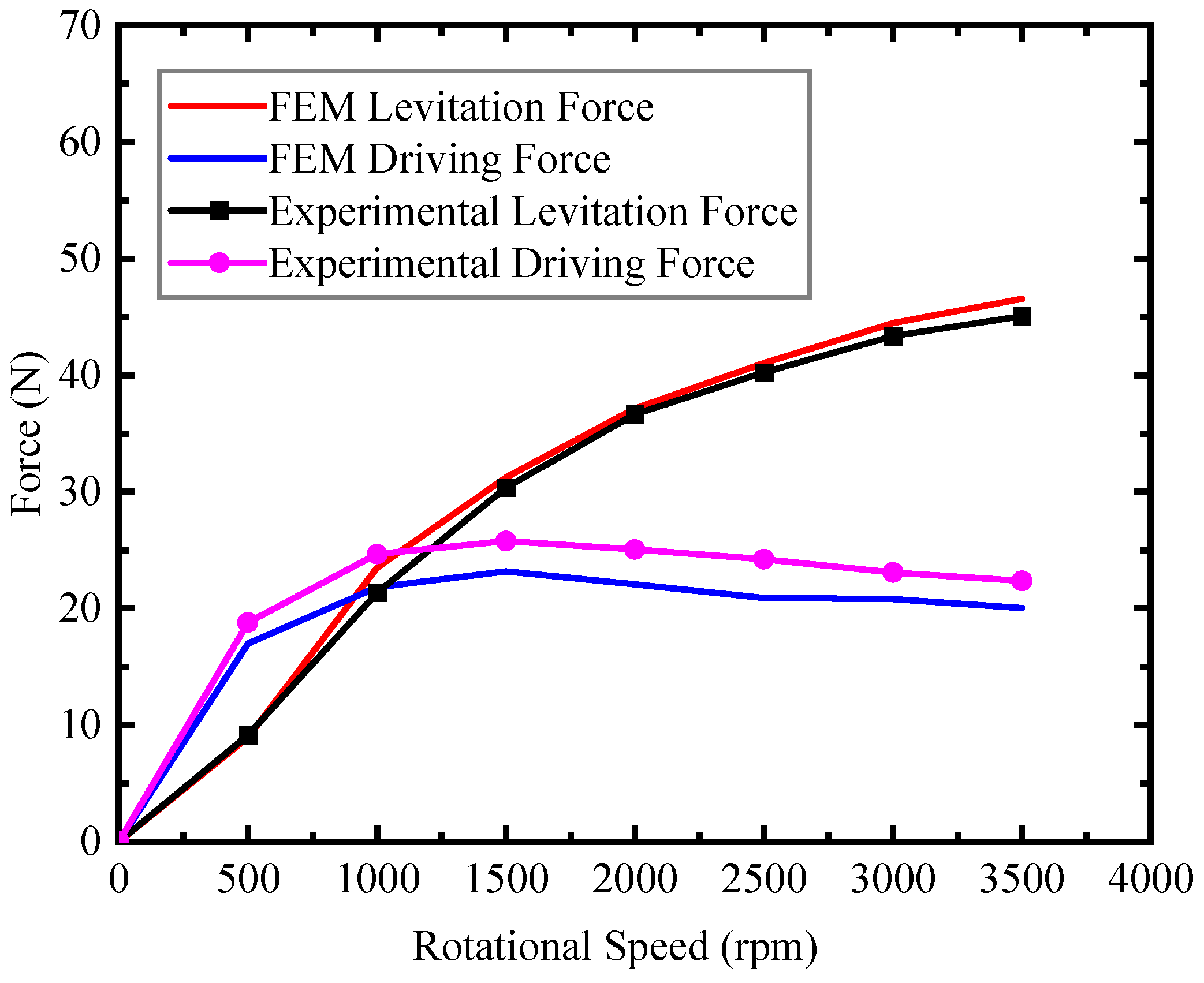
4. EDW Design, Verification, and Optimization
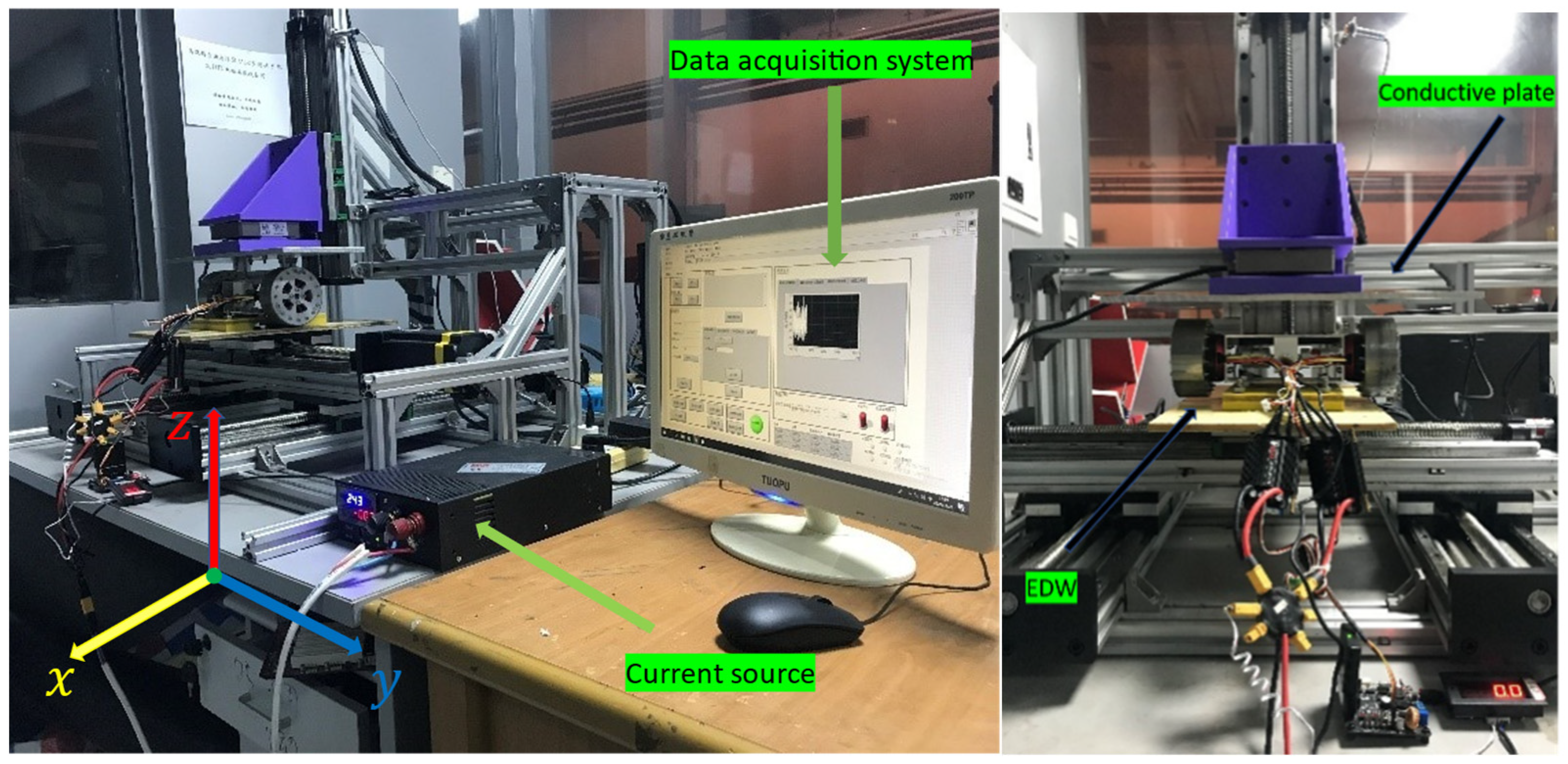
- Assembly:Firstly, fix the EDWs with a fixture, and assemble them to the horizontal platform at the bottom of SCML-05. Ensure that the conductor plate is fixed horizontally so that the measuring path of the force is parallel to the cross-section of the conductor plate [9].
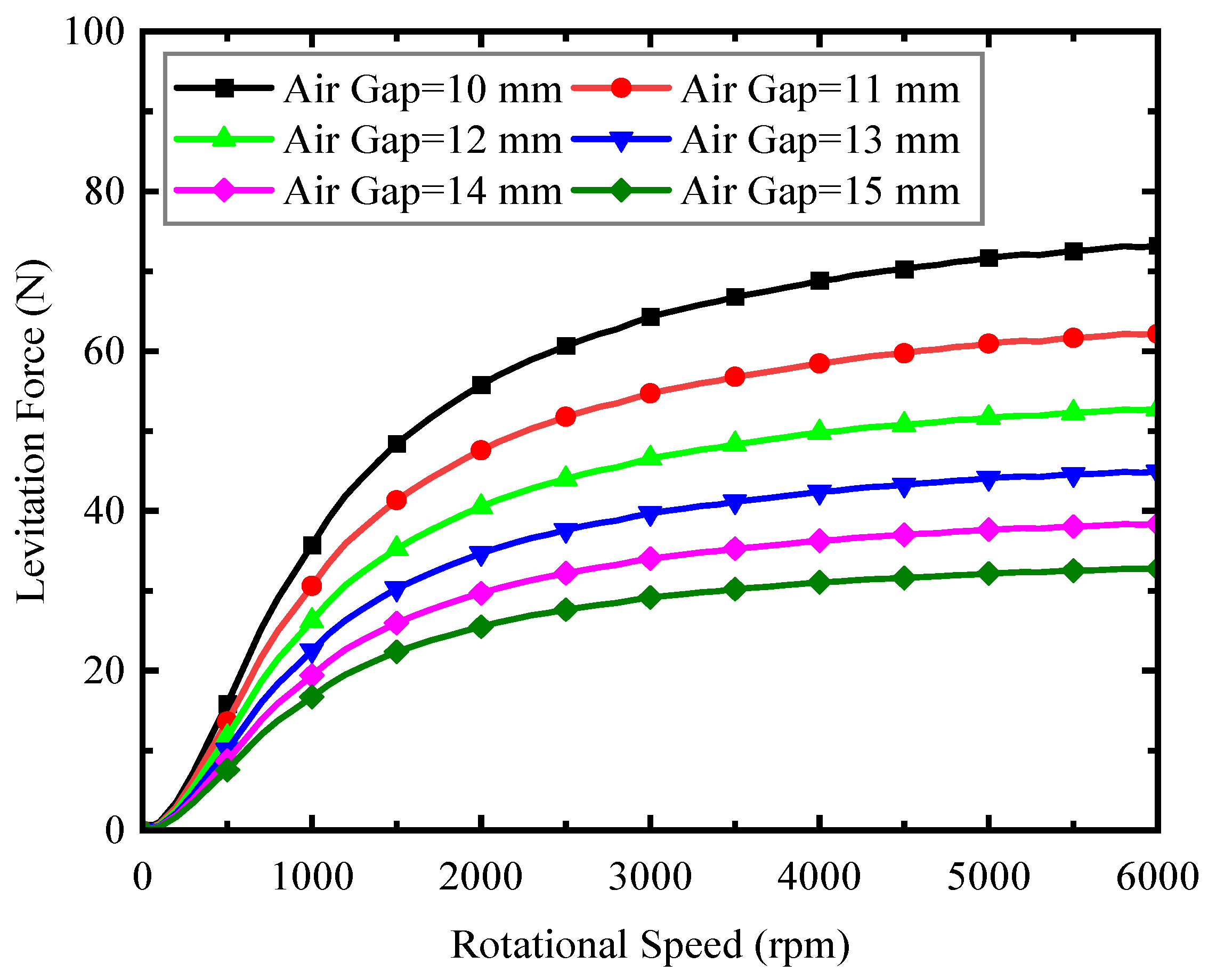
- Positioning:Start the SCML-05 test system, adjust the conductor plate to the initial levitation height of 10 mm in the Z-direction. Then confirm that the EDW structure is horizontally placed under the conductor plate, and the EDWs and conductor plate should be parallel.
- Test:After setting up the test system, the test is carried out at the different selected speed point. The speeds, levitation forces and driving forces should be recorded when the sensor reading is stable.
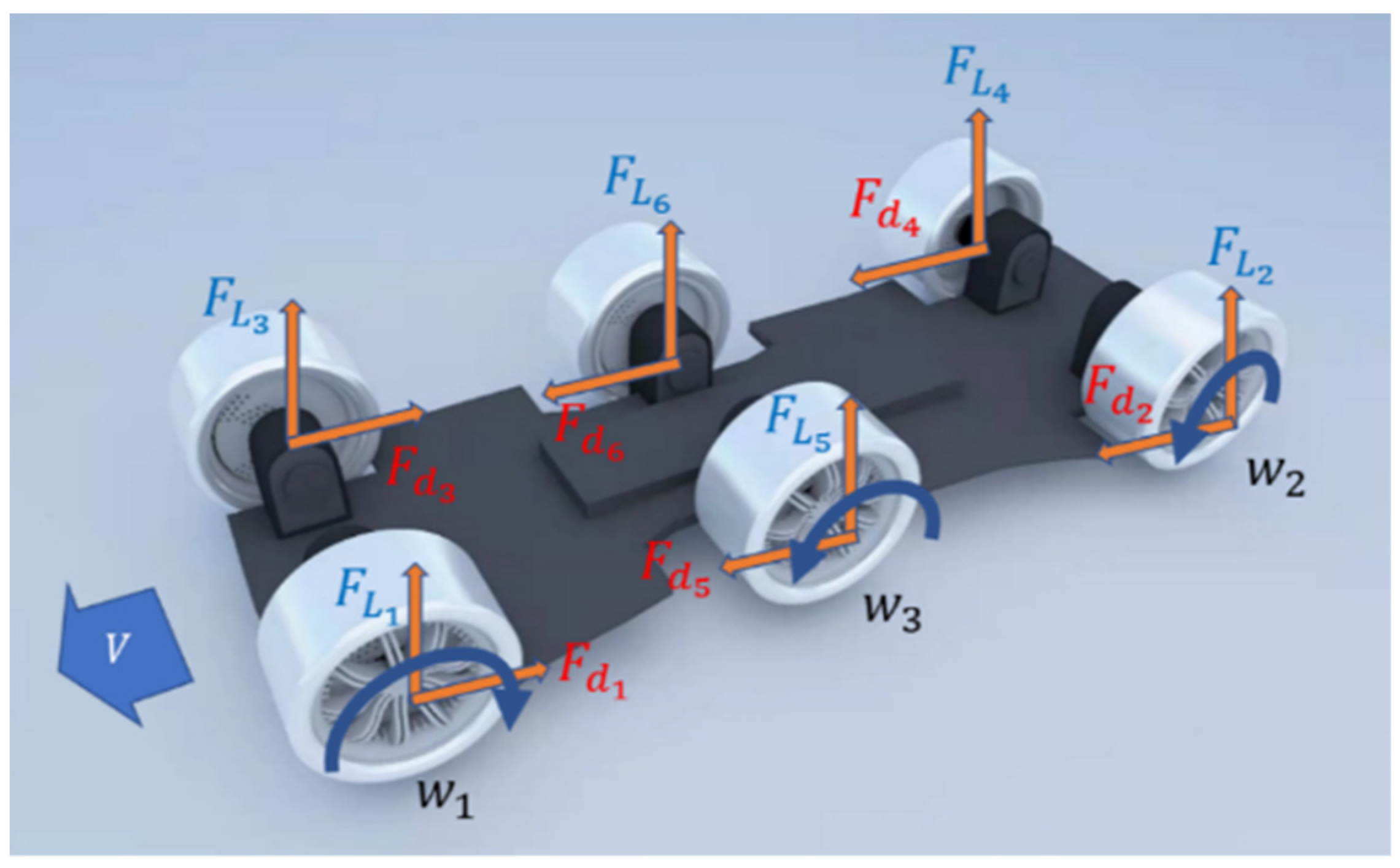
5. Simplified Electromagnetic Force Model
6. Establishment of The Simulation Platform
7. Control Strategy
7.1. Static Suspension
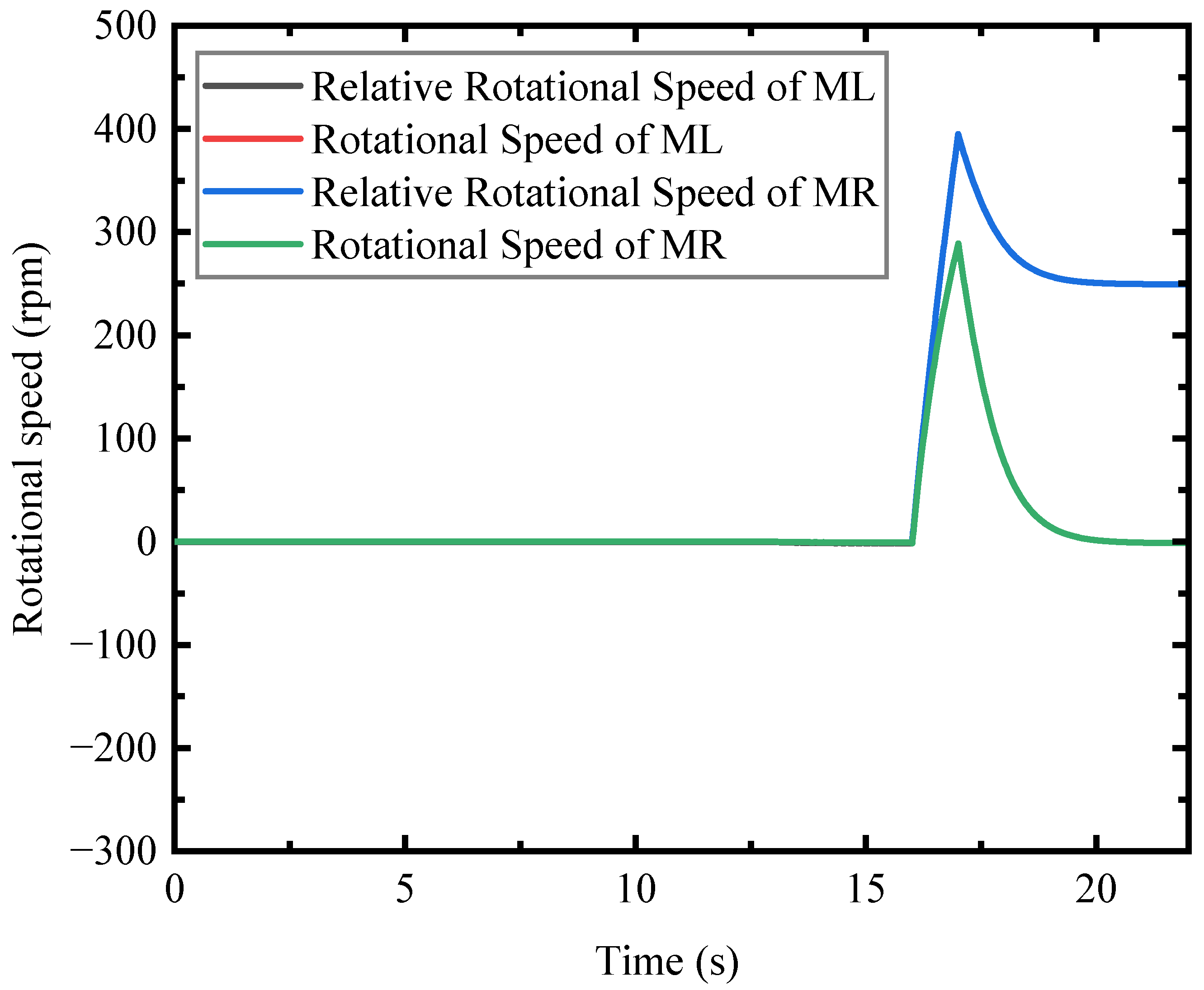
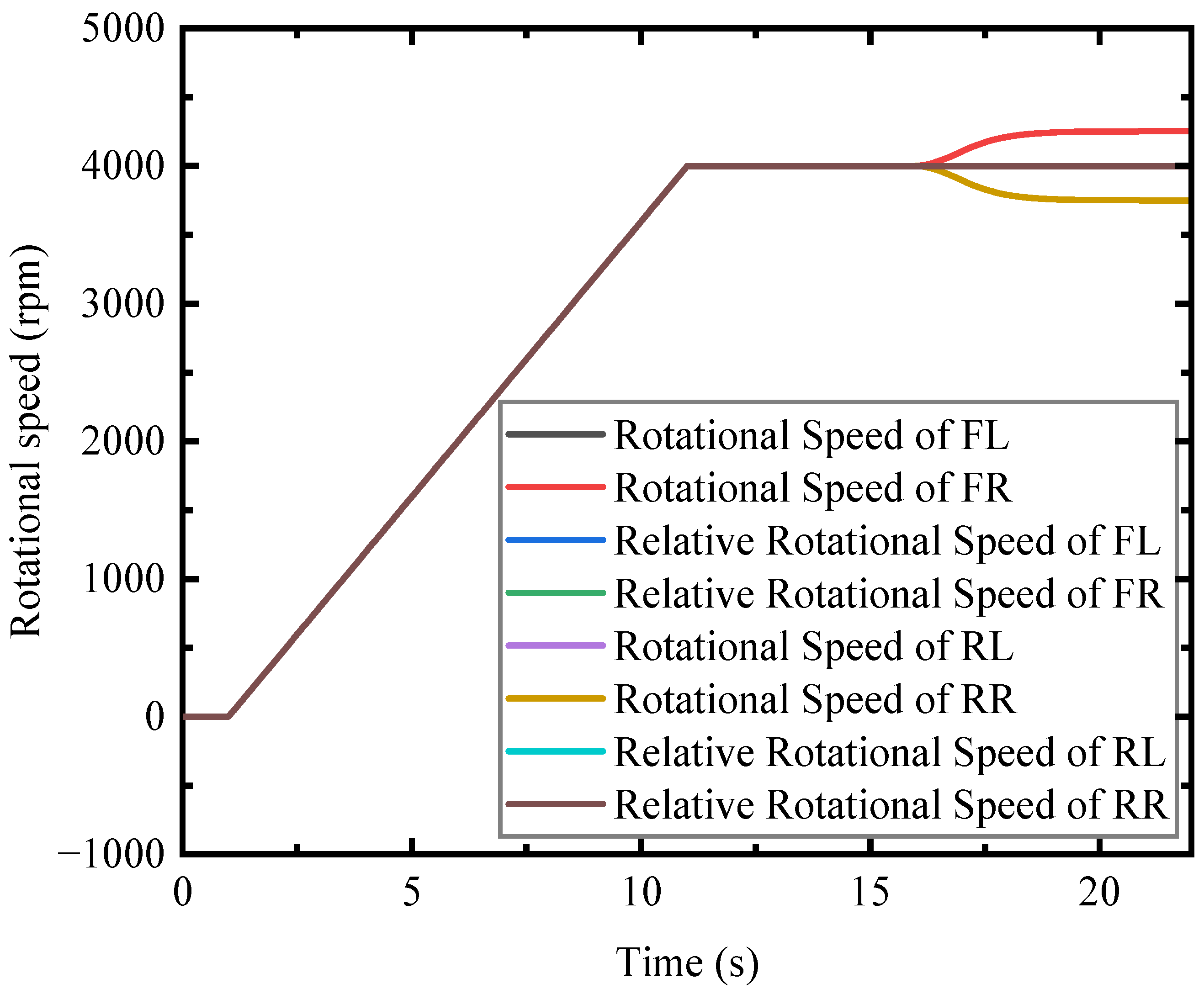
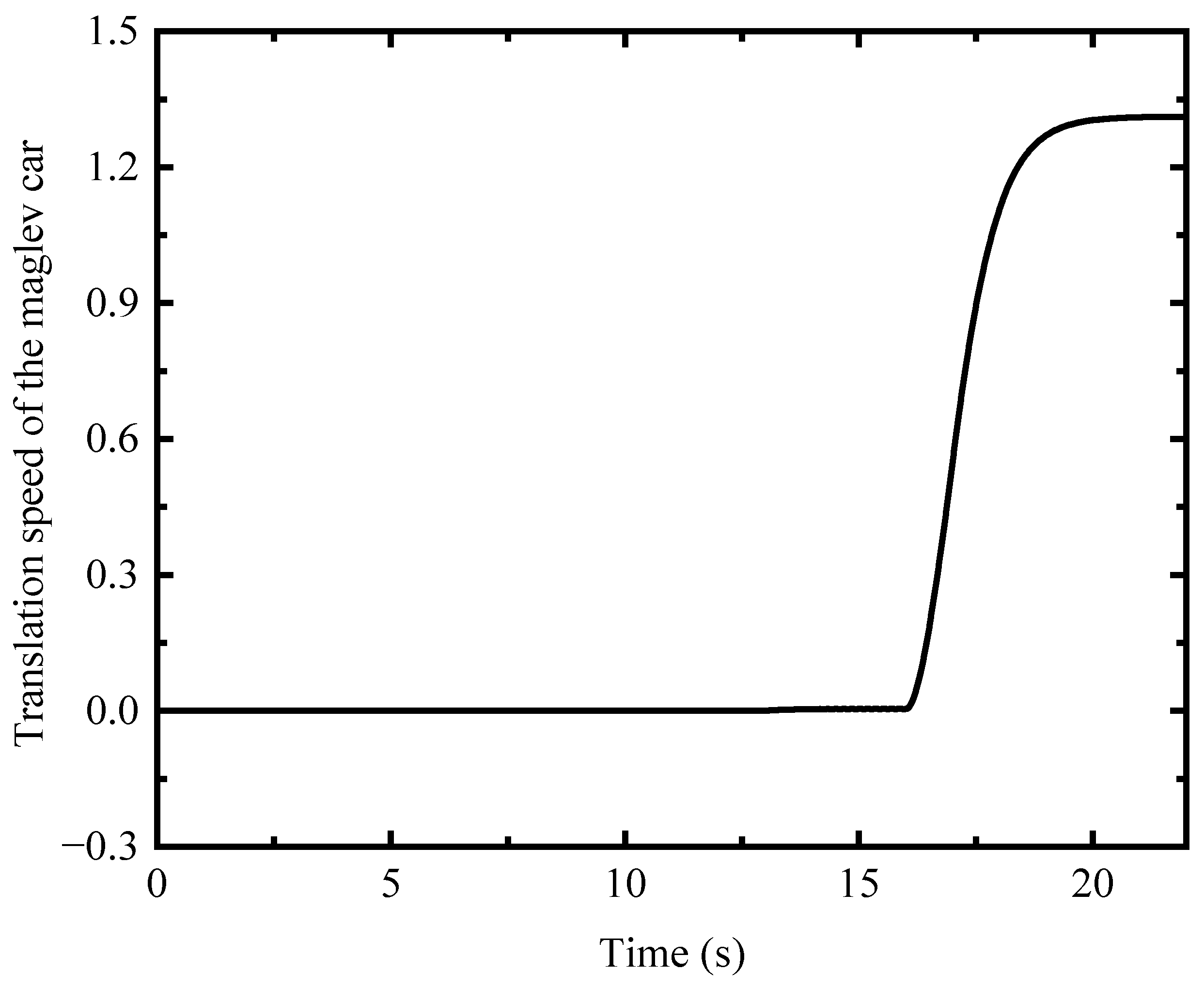
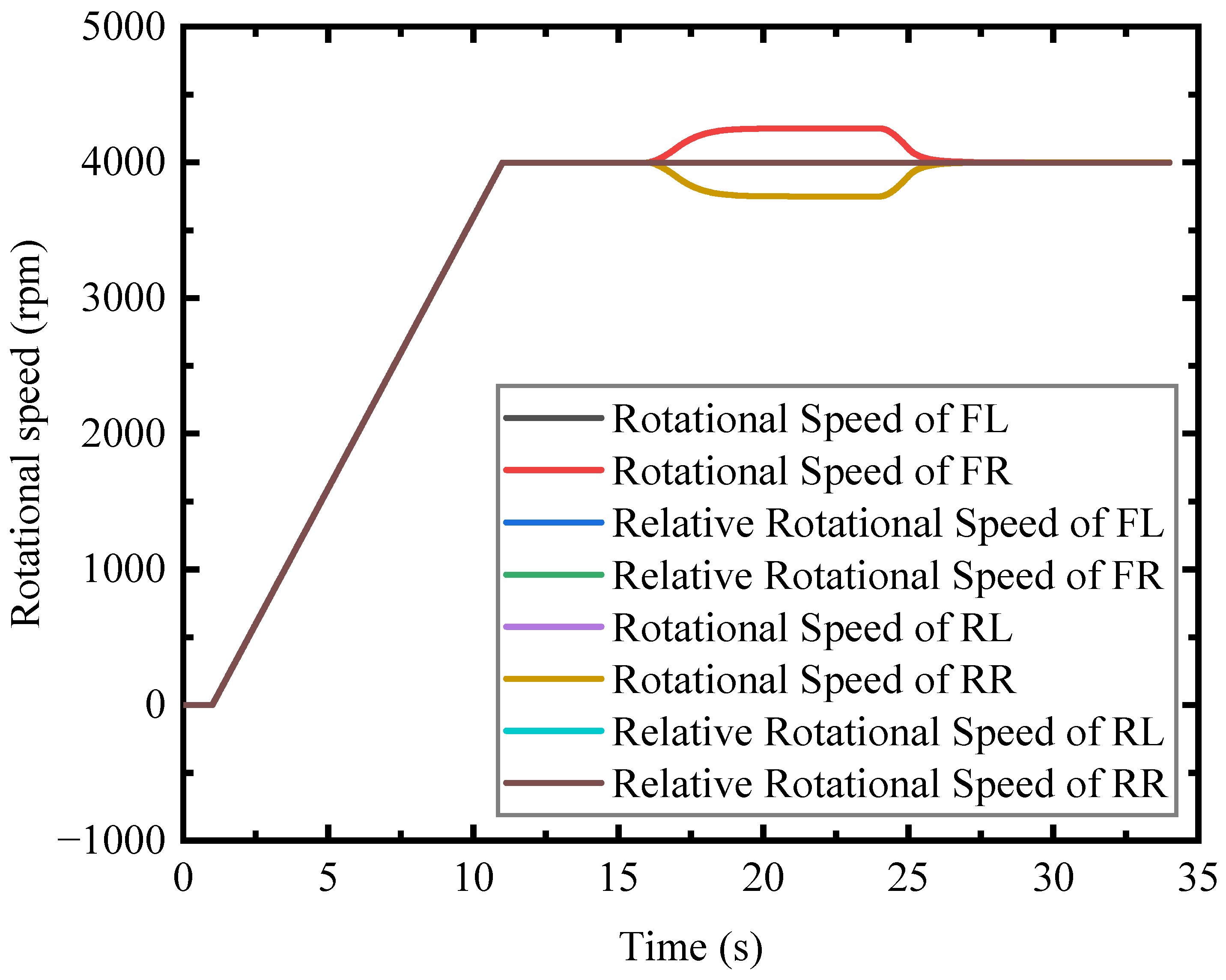
7.2. Acceleration and Uniform Speed
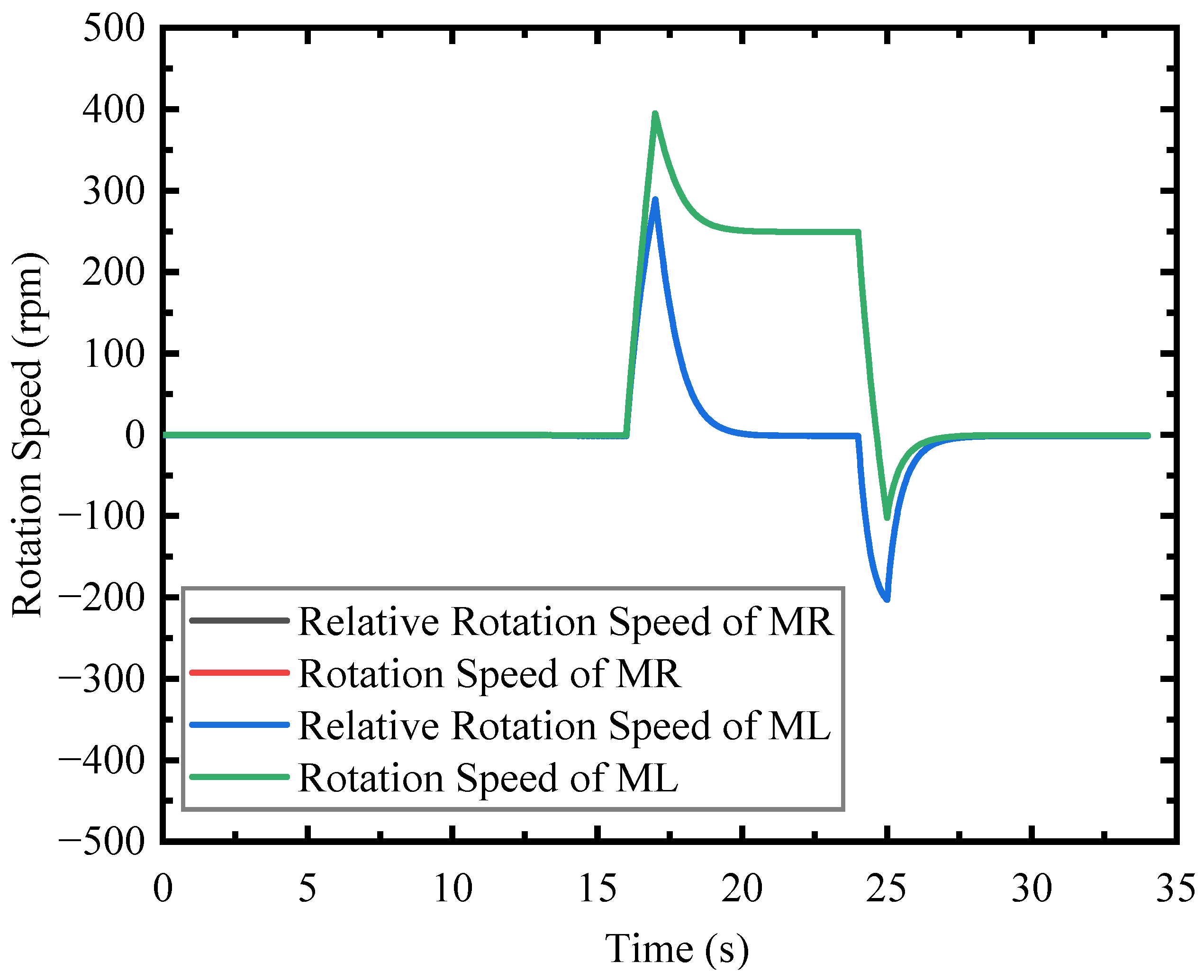
7.3. Deceleration and Braking
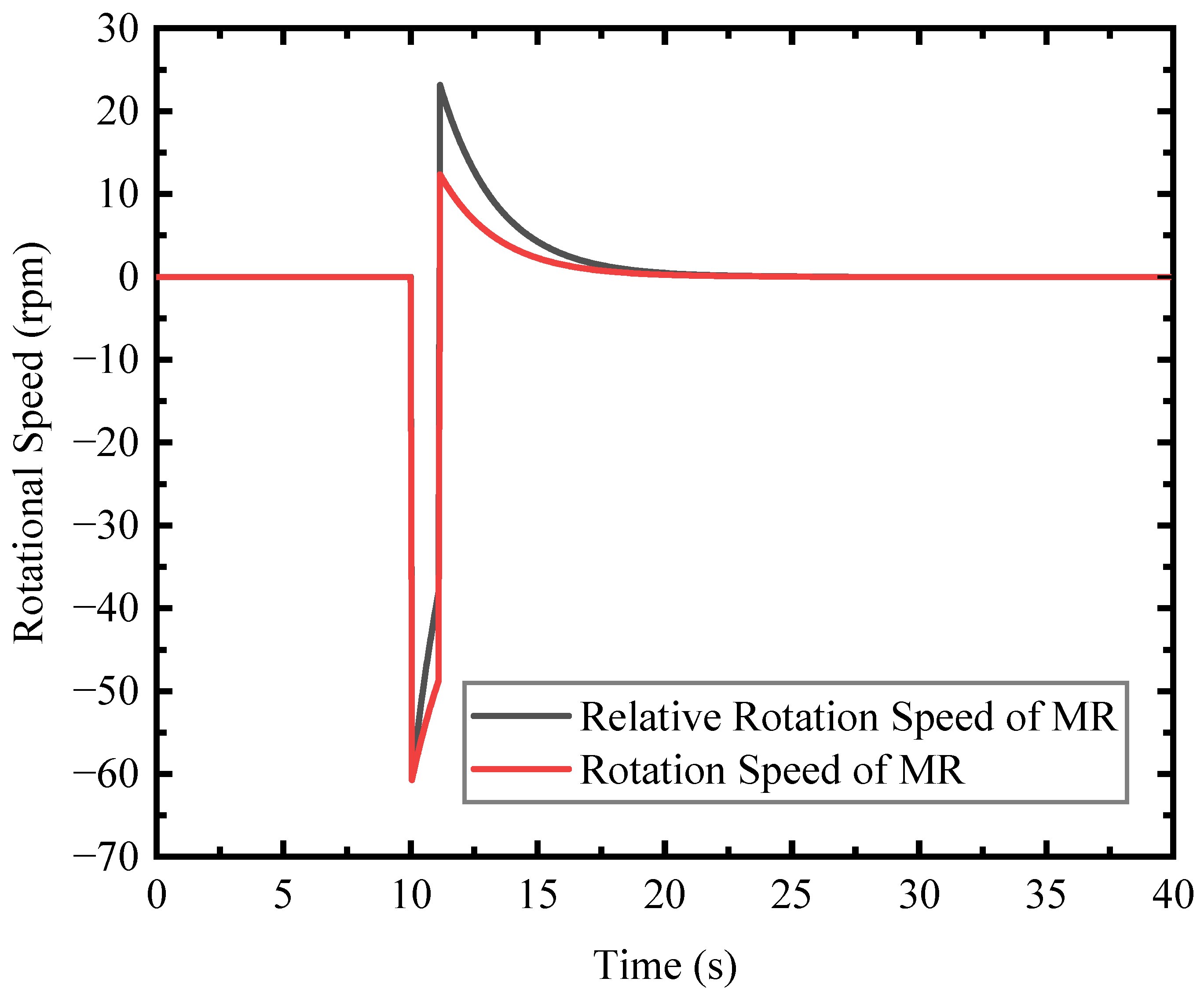
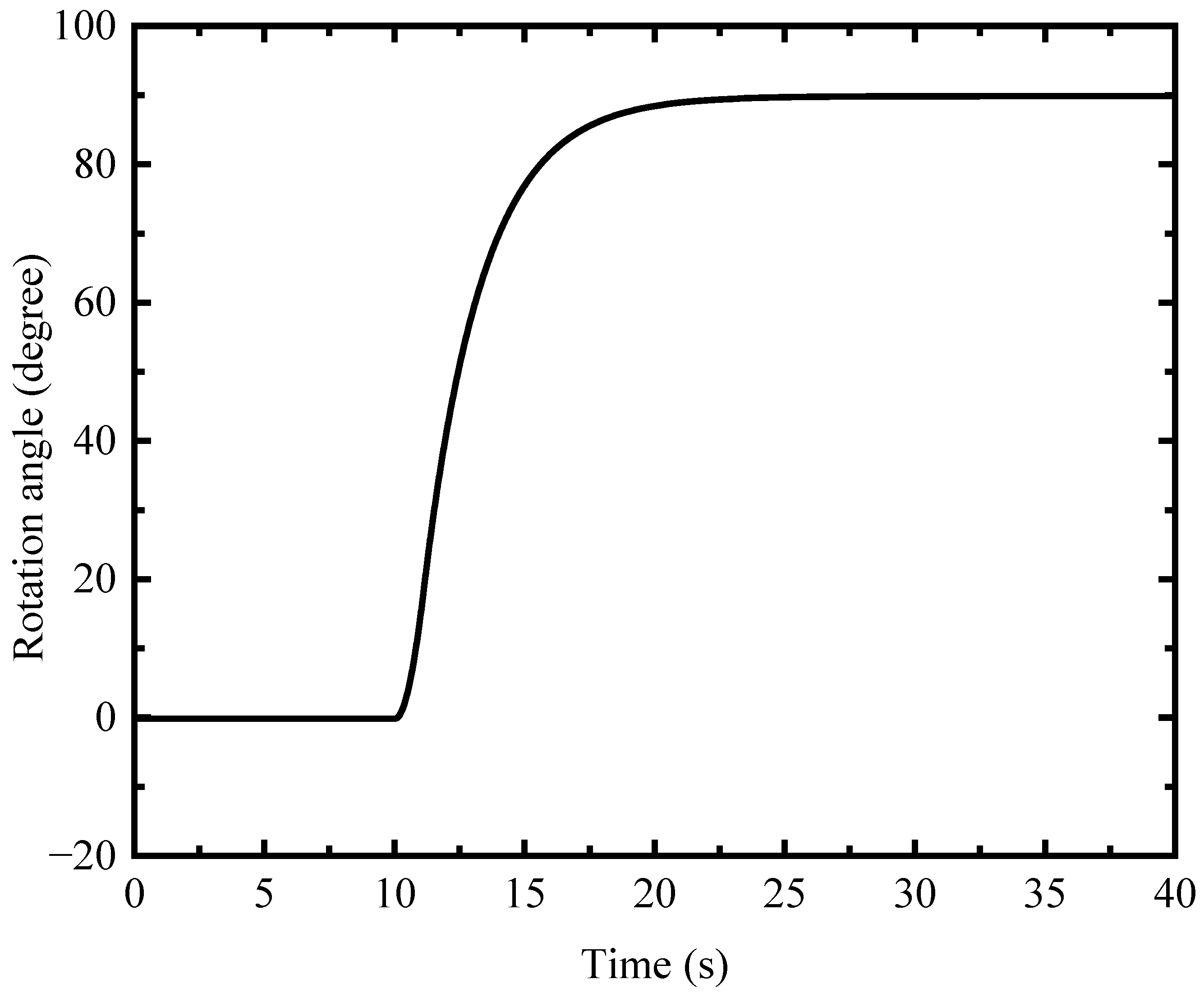
7.4. Pivot Steering
8. Conclusions
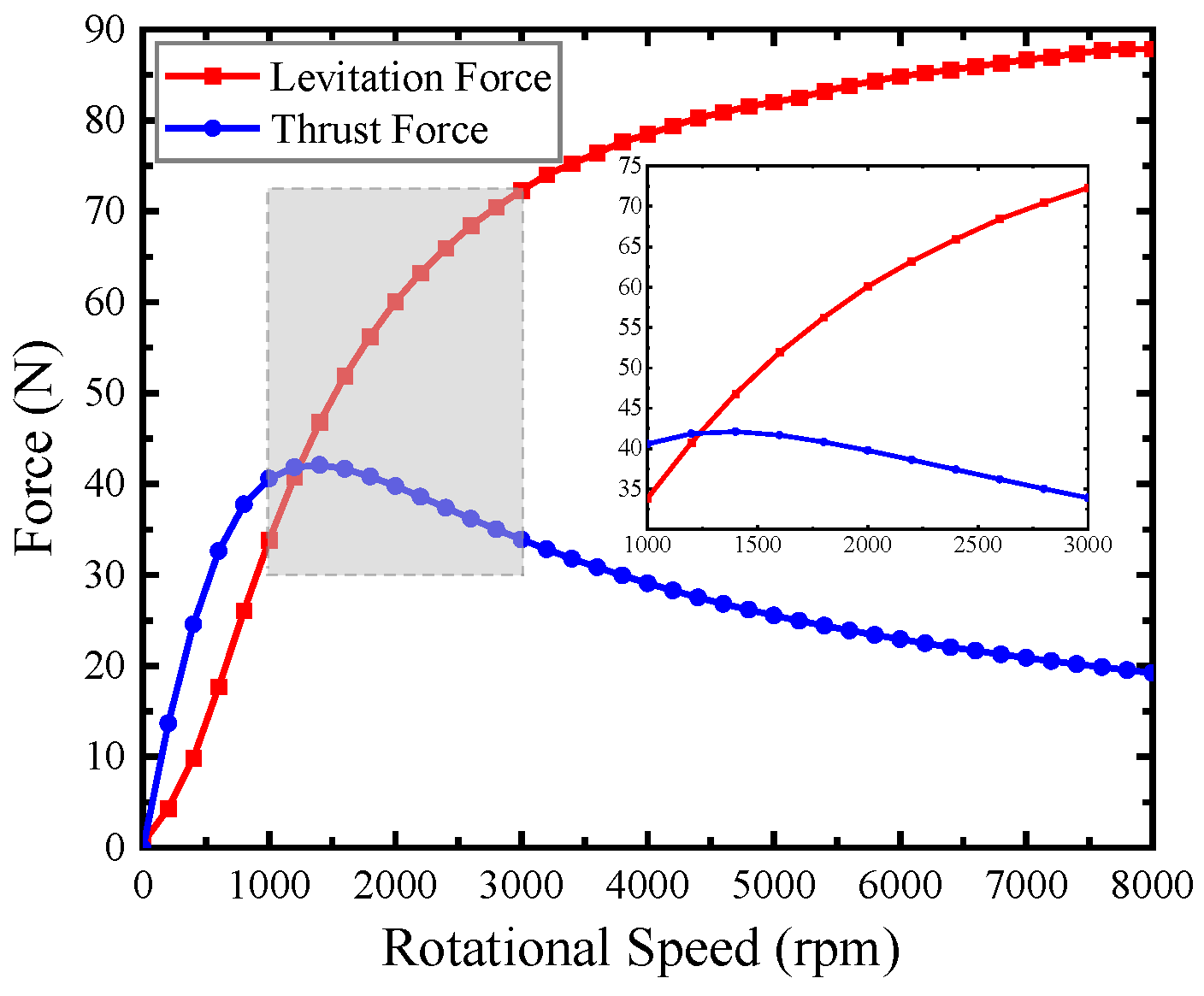
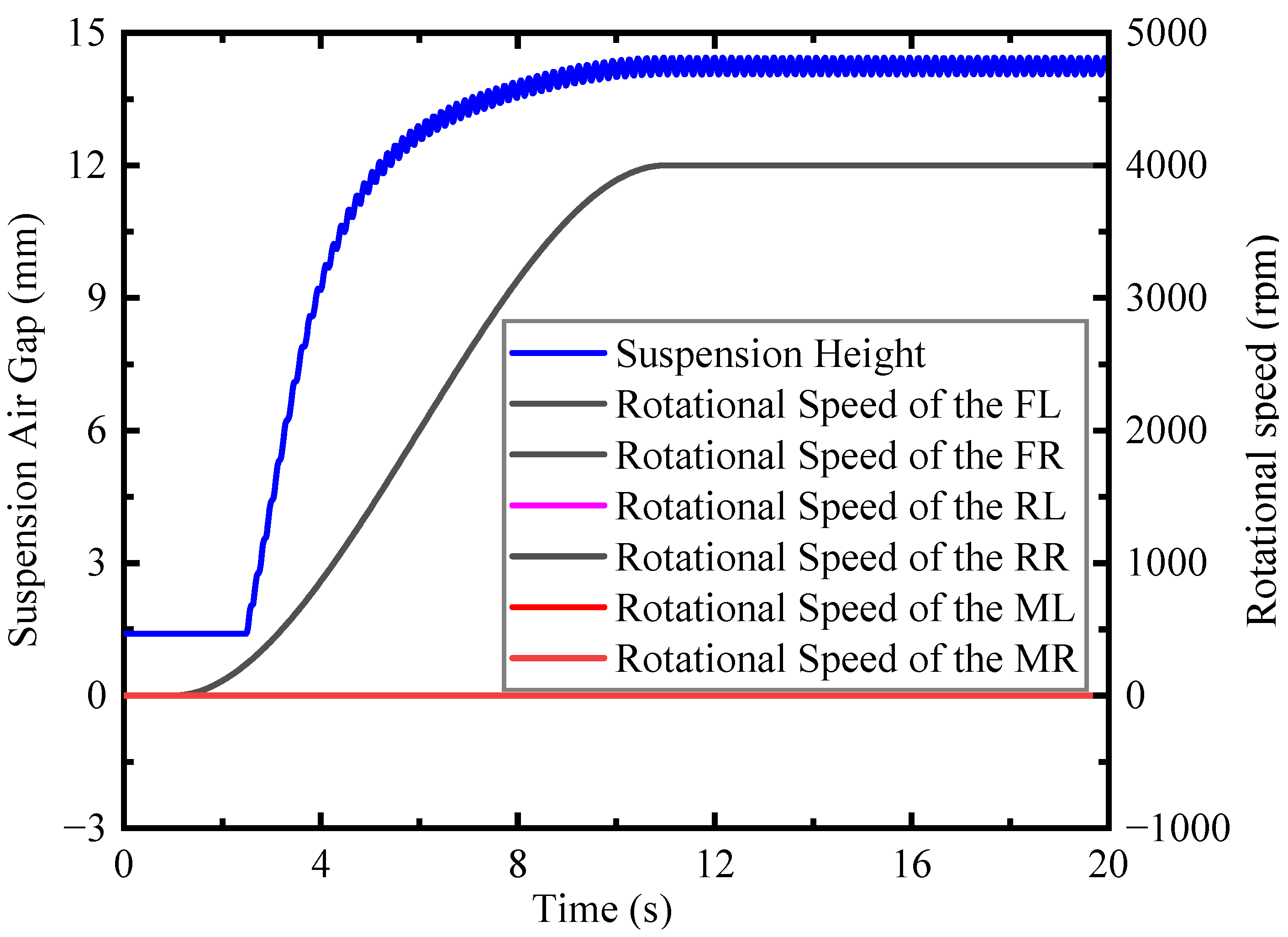
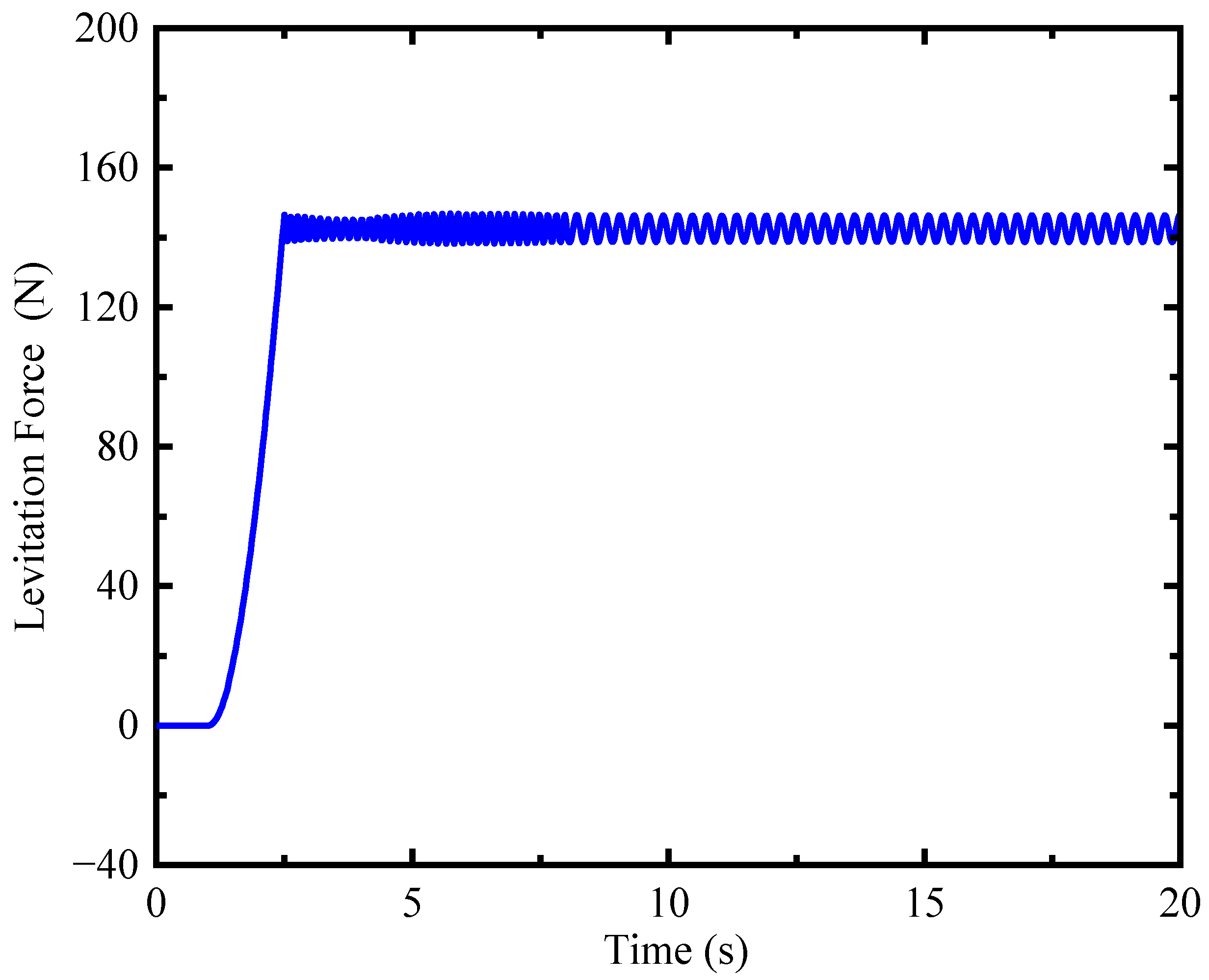
- The maglev car can maintain a suspension air gap at about 14 mm when the rotational speed of the EDWs is 4000 rpm;
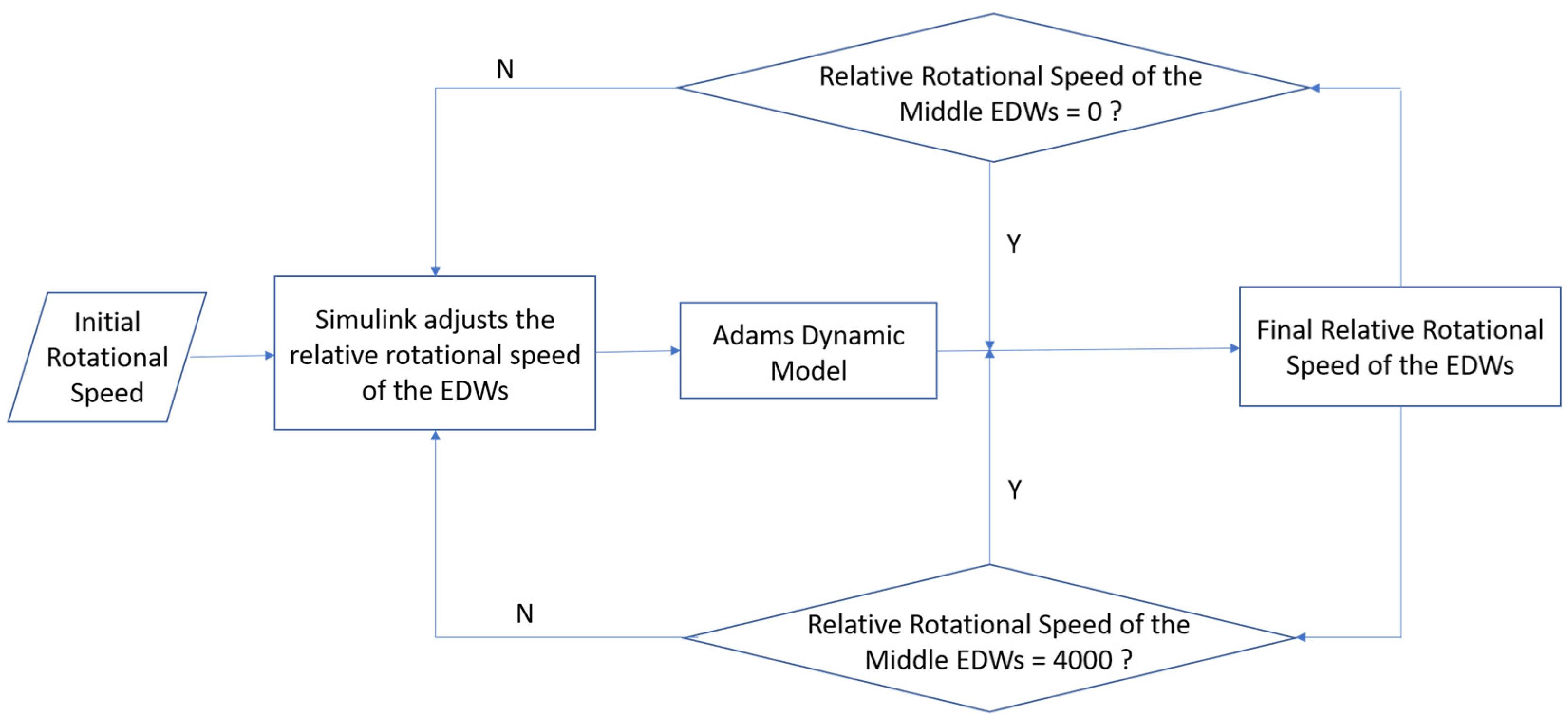
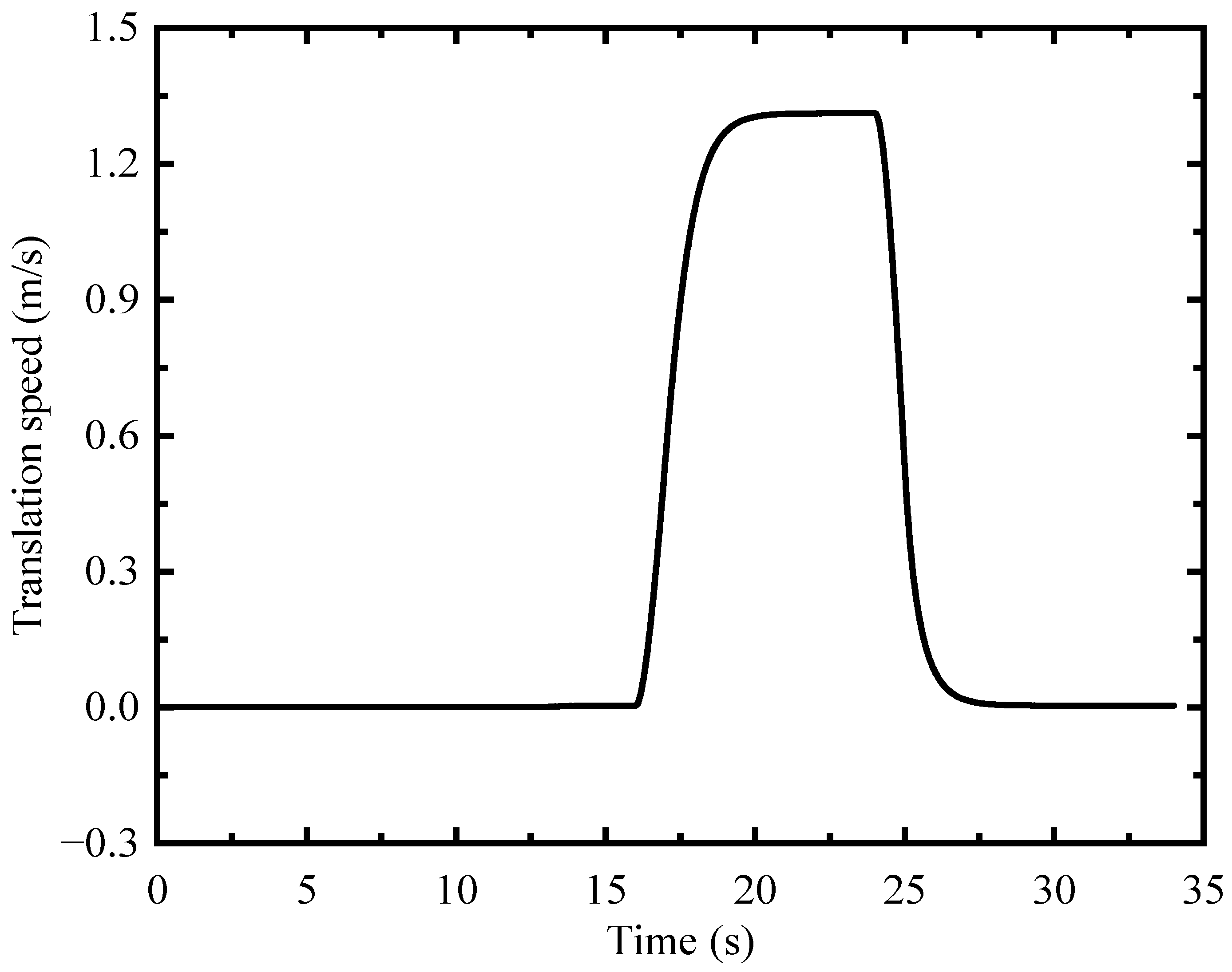
- By changing the rotational speed of the middle EDWs, the maglev vehicle can automatically enter the state of uniform speed and achieve braking. The maximum speed is 1.31 m/s (1:50 model). By using a full-scale model, the final speed of the maglev vehicle can be increased. The results show that the maglev vehicle can run smoothly using the new feedback control strategy;
- By changing the speed of the middle EDWs from 0 to 61 rpm, the maglev car can turn 90 degrees. The function of pivot steering can be achieved, which can reduce the car’s turning radius and the driver’s driving difficulty.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wright, J.D. Modeling, Analysis, and Control of a Radial Electrodynamic Wheel Vehicle and Analysis of an Axial Electrodynamic Wheel. Ph.D. Thesis, The University of North Carolina at Charlotte, Charlotte, NC, USA, 2019. [Google Scholar]
- Zhang, X.; Zheng, J.; Liu, J.; Li, J.; Zhang, W.; Chen, N.; Hu, Z.; Deng, Z. High-temperature superconducting guidance force enhancement by a novel permanent magnet guideway for maglev curve negotiation. J. Alloys Compd. 2022, 902, 163809. [Google Scholar] [CrossRef]
- Zhang, Z.; Deng, Z.; Zhang, S.; Zhang, J.; Jin, L.A.; Sang, X.; Gao, P.; Li, J.; Zheng, J. Design and Operating Mode Study of a New Concept Maglev Car Employing Permanent Magnet Electrodynamic Suspension Technology. Sustainability 2021, 13, 5827. [Google Scholar] [CrossRef]
- Ou, F.Y.; Liao, X.K.; Yi, C.; Lin, J.H. Field Measurements and Analyses of Traction Motor Noise of Medium and Low Speed Maglev Train. Energies 2022, 15, 9061. [Google Scholar] [CrossRef]
- Deng, Z.; Zhang, W.; Zheng, J.; Ren, Y.; Jiang, D.; Zheng, X.; Zhang, J.; Gao, P.; Lin, Q.; Song, B. A high-temperature superconducting maglev ring test line developed in Chengdu, China. IEEE Trans. Appl. Supercond. 2016, 26, 1–8. [Google Scholar] [CrossRef]
- Wang, J.; Wang, S.; Zheng, J. Recent development of high temperature superconducting Maglev system in China. IEEE Trans. Appl. Supercond. 2009, 19, 2142–2147. [Google Scholar] [CrossRef]
- Ke, Z.; Liu, X.; Chen, Y.; Shi, H.; Deng, Z. Prediction models establishment and comparison for guiding force of high-temperature superconducting maglev based on deep learning algorithms. Supercond. Sci. Technol. 2022, 35, 024005. [Google Scholar] [CrossRef]
- Wang, J.-S.; Wang, S.-Y. High Temperature Superconducting Magnetic Levitation; De Gruyter: Berlin, Germany, 2017. [Google Scholar]
- Sang, X.; Deng, Z.; Chen, J.; Zhang, Z.; Zhang, J.; Zheng, J. Analysis and Experiment on the Levitation Force and Thrust Force Characteristics of a Permanent Magnet Electrodynamic Wheel for Maglev Car Application. IEEE Trans. Appl. Supercond. 2021, 31, 1–4. [Google Scholar] [CrossRef]
- Hu, Y.; Zeng, J.; Long, Z. Analysis of Dynamic Characteristics of Electrodynamic Suspension Train Based on Halbach Permanent Magnet Array. In Proceedings of the 2019 Chinese Automation Congress (CAC), Hangzhou, China, 22–24 November 2019; pp. 3754–3758. [Google Scholar]
- Yuan, Y.; Deng, Z.; Zhang, S.; Ke, Z.; Shi, H.; Wang, Z.; Zhang, J.; Zheng, J. Working Principle and Primary Electromagnetic Characteristics of a Permanent Magnet Electrodynamic Wheel for Maglev Car Application. IEEE Trans. Appl. Supercond. 2021, 31, 1–5. [Google Scholar] [CrossRef]
- Fujii, N.; Chida, M.; Ogawa, K. Three dimensional force of magnet wheel with revolving permanent magnets. IEEE Trans. Magn. 1997, 33, 4221–4223. [Google Scholar] [CrossRef]
- Lee, H.-W.; Kim, K.-C.; Lee, J. Review of maglev train technologies. IEEE Trans. Magn. 2006, 42, 1917–1925. [Google Scholar]
- Hellinger, R.; Mnich, P. Linear motor-powered transportation: History, present status, and future outlook. Proc. IEEE 2009, 97, 1892–1900. [Google Scholar] [CrossRef]
- Thornton, R.; Thompson, M.T.; Perreault, B.M.; Fang, J. Linear motor powered transportation [Scanning the Issue]. Proc. IEEE 2009, 97, 1754–1757. [Google Scholar] [CrossRef] [Green Version]
- Tsuchishima, H.; Terai, M. The Superconducting Magnet System for MAGLEV Vehicles in 550 km/h Operation on the Yamanashi Test Line. TEION KOGAKU (J. Cryog. Supercond. Soc. Jpn.) 1998, 33, 656–664. [Google Scholar] [CrossRef]
- Yang, H.Y.; Li, Y.X.; Lu, Q.F. Performance Simulation of Long-Stator Linear Synchronous Motor for High-Speed Maglev Train under Three-Phase Short-Circuit Fault. World Electr. Veh. J. 2022, 13, 216. [Google Scholar] [CrossRef]
- Paudel, N.; Bird, J. A 2D analytic based model of a rotor moving over a conductive guideway. In Proceedings of the Digests of the 2010 14th Biennial IEEE Conference on Electromagnetic Field Computation, Chicago, IL, USA, 9–12 May 2010; p. 1. [Google Scholar]
- Fujii, N.; Hayashi, G.; Sakamoto, Y. Characteristics of magnetic lift, propulsion and guidance by using magnet wheels with rotating permanent magnets. In Proceedings of the Conference Record of the 2000 IEEE Industry Applications Conference. Thirty-Fifth IAS Annual Meeting and World Conference on Industrial Applications of Electrical Energy (Cat. No. 00CH37129), Rome, Italy, 8–12 October 2000; pp. 257–262. [Google Scholar]
- Bird, J.; Lipo, T. Modeling the 3D Rotational and Translational Motion of Magnets over a Conducting Guideway using a Combined Field and Lumped-Parameter Model. In Proceedings of the 2006 IEEE International Magnetics Conference (INTERMAG), San Diego, CA, USA, 8–12 May 2006; p. 502. [Google Scholar]
- Jin, J.J.; Wang, X.; Zhao, C.; Xu, F.C.; Pei, W.Z.; Liu, Y.H.; Sun, F. Characteristics Analysis of an Electromagnetic Actuator for Magnetic Levitation Transportation. Actuators 2022, 11, 377. [Google Scholar] [CrossRef]
- Huang, L.; Hu, H.; Ouyang, Q. Design and Feasibility Study of MRG-Based Variable Stiffness Soft Robot. Micromachines 2022, 13, 2036. [Google Scholar] [CrossRef]
- Li, B.; Yang, B.F.; Xiang, F.H.; Guo, J.J. Optimal Design of a New Rotating Magnetic Beacon Structure Based on Halbach Array. Appl. Sci. 2022, 12, 10506. [Google Scholar] [CrossRef]
- Huang, C.C.; Kou, B.Q.; Zhao, X.K.; Niu, X.; Zhang, L. Multi-Objective Optimization Design of a Stator Coreless Multidisc Axial Flux Permanent Magnet Motor. Energies 2022, 15, 4810. [Google Scholar] [CrossRef]
- Huang, R.D.; Liu, C.H.; Song, Z.X.; Zhao, H. Design and Analysis of a Novel Axial-Radial Flux Permanent Magnet Machine with Halbach-Array Permanent Magnets. Energies 2021, 14, 3639. [Google Scholar] [CrossRef]
- Bird, J.; Lipo, T.A. A 3-D magnetic charge finite-element model of an electrodynamic wheel. IEEE Trans. Magn. 2008, 44, 253–265. [Google Scholar] [CrossRef]
- Jin, Y.; Kou, B.; Li, L.; Li, C.; Pan, D.; Song, K. Analytical model for a permanent magnet eddy-current brake with transverse edge effect. IEEE Access 2019, 7, 61170–61179. [Google Scholar] [CrossRef]
- Zhang, G.W.; Zhu, J.M.; Li, Y.; Yuan, Y.H.; Xiang, Y.Q.; Lin, P.; Wang, L.; Liu, J.X.; Liang, L.; Deng, Z.G. Simulation of the Braking Effects of Permanent Magnet Eddy Current Brake and Its Effects on Levitation Characteristics of HTS Maglev Vehicles. Actuators 2022, 11, 295. [Google Scholar] [CrossRef]
- Xiang, Y.; Deng, Z.; Shi, H.; Li, K.; Cao, T.; Deng, B.; Liang, L.; Zheng, J. Design and Analysis of Guidance Function of Permanent Magnet Electrodynamic Suspension. Technologies 2023, 11, 3. [Google Scholar] [CrossRef]
- Chen, C.T.; Xu, J.; Yuan, X.B.; Wu, X.Z. Characteristic Analysis of the Peak Braking Force and the Critical Speed of Eddy Current Braking in a High-Speed Maglev. Energies 2019, 12, 2622. [Google Scholar] [CrossRef] [Green Version]
- Post, R.F.; Hoburg, J.F. A Laminated Track for the Inductrack System: Theory and Experiment; Lawrence Livermore National Lab.: Livermore, CA, USA, 2004.
- Paudel, N.; Bird, J.Z. Modeling the dynamic electromechanical suspension behavior of an electrodynamic eddy current maglev device. Prog. Electromagn. Res. B 2013, 49, 1–30. [Google Scholar] [CrossRef] [Green Version]
- Bird, J. An Investigation into the Use of Electrodynamic Wheels for High-Speed Ground Transportation. Ph.D. Thesis, University of Wisconsin-Madison, Madison, WI, USA, 2007. [Google Scholar]
- Paul, S.; Bird, J.Z. A 3-D analytic eddy current model for a finite width conductive plate. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2014, 33, 688–706. [Google Scholar] [CrossRef]
- Bird, J.; Lipo, T.A. Calculating the forces created by an electrodynamic wheel using a 2-D steady-state finite-element method. IEEE Trans. Magn. 2008, 44, 365–372. [Google Scholar] [CrossRef]
- Jiao, S.L.; Zhang, X.J.; Zhang, X.; Jia, J.D.; Zhang, M.L. Magnetic Circuit Analysis of Halbach Array and Improvement of Permanent Magnetic Adsorption Device for Wall-Climbing Robot. Symmetry 2022, 14, 429. [Google Scholar] [CrossRef]
- Guo, Q.-Y.; Huang, S.-Z.; Wu, W.-Y.; Hu, J.-T. Research on pyrometric effect on eddy current brake for maglev train. J. China Railw. Soc. 2012, 34, 29–33. [Google Scholar]
- Guo, S.K.; Gao, S.Q.; Jin, L.; Du, X.D.; Wu, Q.H.; Shang, J. Characteristic Analysis, Simulation, and Experimental Comparison of Two Kinds of Circular Magnet Array in Energy Harvesting. Appl. Sci. 2022, 12, 1962. [Google Scholar] [CrossRef]
- Bird, J.; Lipo, T. A preliminary investigation of an electrodynamic wheel for simultaneously creating levitation and propulsion. In Proceedings of the 18th International Conference on Magnetically Levitated Systems and Linear Drives, Shanghai, China, 26–28 October 2004; pp. 316–325. [Google Scholar]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Pole pairs, P | 4 |
| Remanence of permanent, Br/T | 1.42 |
| Inner radius of EDW, Ri/mm | 35 |
| Outer radius of EDW, Ro/mm | 50 |
| Width of EDW, Ww/mm | 35 |
| Width of Conductor Plate, Wp/mm | 70 |
| Thickness of Conductor Plate, Tp/mm | 10 |
| Resistivity of Conductor Plate, ρ/Ω·m | 2.826 × 10−8 |
| Velocity of motor, V/rpm | 0–6000 |
| Air gap, G/mm | 3–15 |
| Magnetization angle, A/° | 90 |
| Parameter | Value |
|---|---|
| Pole pairs, P | 3 |
| Remanence of permanent, Br/T | 1.42 |
| Inner radius of EDW, Ri/mm | 35 |
| Outer radius of EDW, Ro/mm | 50 |
| Width of EDW, Ww/mm | 35 |
| Width of Conductor Plate, Wp/mm | 70 |
| Thickness of Conductor Plate, Tp/mm | 10 |
| Resistivity of Conductor Plate, ρ/Ω·m | 2.826 × 10−8 |
| Velocity of motor, V/rpm | 0–6000 |
| Air gap, G/mm | 3–15 |
| Magnetization angle, A/° | 30 |
| Parameter | Value |
|---|---|
| Rotational Speed of the EDW, /rpm | 0–6000 |
| Suspension Air Gap, /mm | 3–15 |
| Rotational Speed of the EDW before Center and Scale, /rpm | 0–6000 |
| Suspension Air Gap before Center and Scale, /mm | 3–15 |
| Average of the /rpm | 3000 |
| Average of the /mm | 9 |
| Standard Deviation of the /rpm | 1761.793 |
| Standard Deviation of the /mm | 3.744 |
| Parameter | Value |
|---|---|
| Rotational Speed of the EDW, /rpm | 0–6000 |
| Suspension Air Gap, /mm | 3–15 |
| Rotational Speed of the EDW before Center and Scale, /rpm | 0–6000 |
| Suspension Air Gap before Center and Scale, /mm | 3–15 |
| Average of the /rpm | 3600 |
| Average of the /mm | 9 |
| Standard Deviation of the /rpm | 2114.15 |
| Standard Deviation of the /mm | 3.744 |
| Parameter | Value |
|---|---|
| 75.95 | |
| 10.55 | |
| −48.69 | |
| −8.31 | |
| −8.171 | |
| 16.41 | |
| 6.022 | |
| 8.237 | |
| 5.66 | |
| −3.351 | |
| −1.369 | |
| −3.183 | |
| −2.6 | |
| −1.437 | |
| 0.465 |
| Parameter | Value |
|---|---|
| 19.6 | |
| −8.085 | |
| −13.26 | |
| 8.853 | |
| 10.28 | |
| 6.299 | |
| −5.701 | |
| −4.528 | |
| −3.497 | |
| −1.572 | |
| −5.037 | |
| −3.709 | |
| −1.245 | |
| 0.2779 | |
| −3.203 | |
| 2.884 | |
| 1.236 | |
| 0.3212 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, P.; Deng, Z.; Ke, Z.; Lei, W.; Wang, X.; Ren, K. Dynamic Characteristics and Working Modes of Permanent Magnet Electrodynamic Suspension Vehicle System Based on Six Wheels of Annular Halbach Structure. Technologies 2023, 11, 16. https://doi.org/10.3390/technologies11010016
Lin P, Deng Z, Ke Z, Lei W, Wang X, Ren K. Dynamic Characteristics and Working Modes of Permanent Magnet Electrodynamic Suspension Vehicle System Based on Six Wheels of Annular Halbach Structure. Technologies. 2023; 11(1):16. https://doi.org/10.3390/technologies11010016
Chicago/Turabian StyleLin, Peng, Zigang Deng, Zhihao Ke, Wuyang Lei, Xuanbo Wang, and Kehong Ren. 2023. "Dynamic Characteristics and Working Modes of Permanent Magnet Electrodynamic Suspension Vehicle System Based on Six Wheels of Annular Halbach Structure" Technologies 11, no. 1: 16. https://doi.org/10.3390/technologies11010016