
Digitalization and Quantitative Flow Visualization of Surrounding Flow over a Specially-Shaped Column-Frame by Luminescent Mini-Tufts Method


Abstract
:1. Introduction
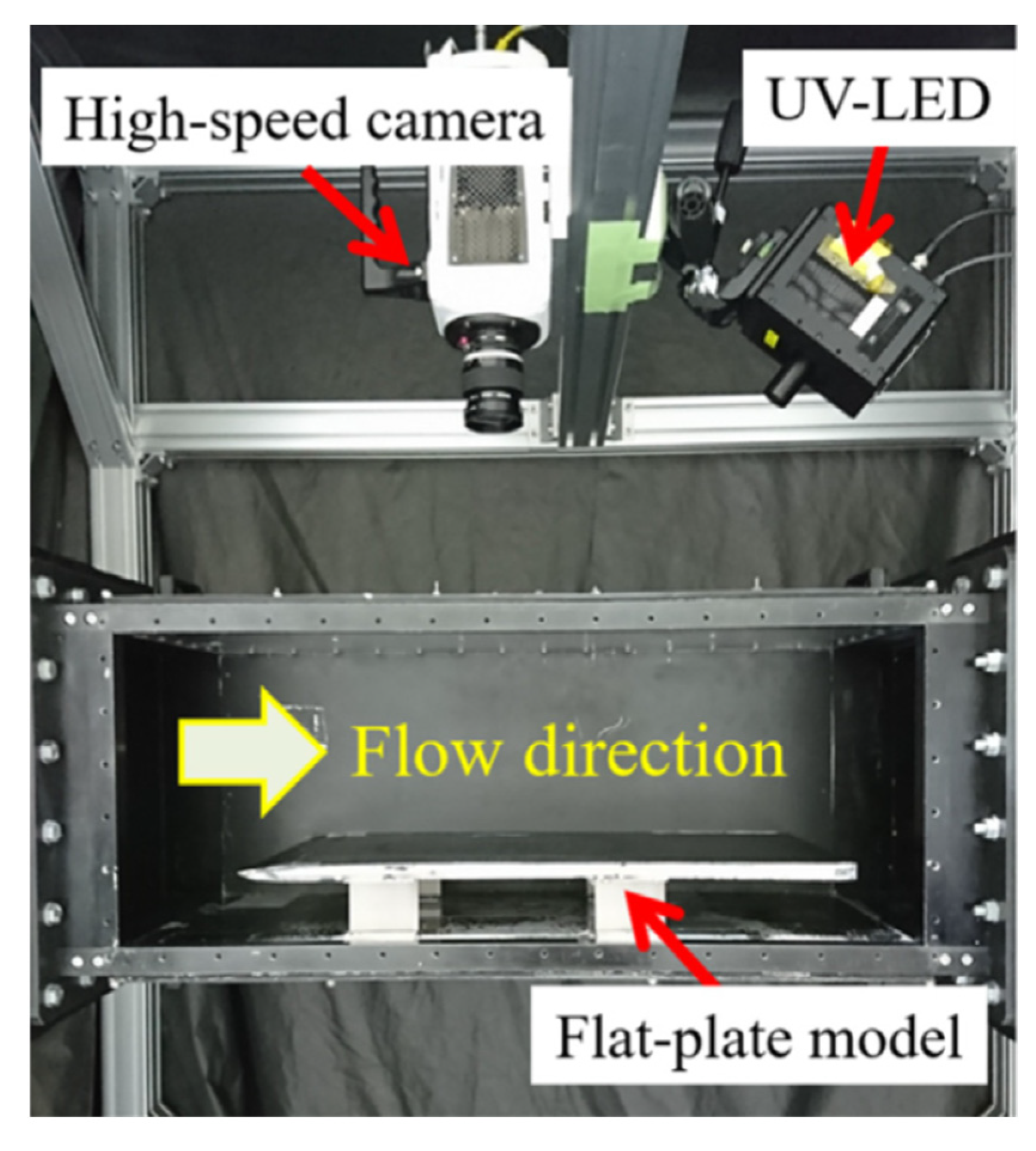
2. Experimental Set-Ups
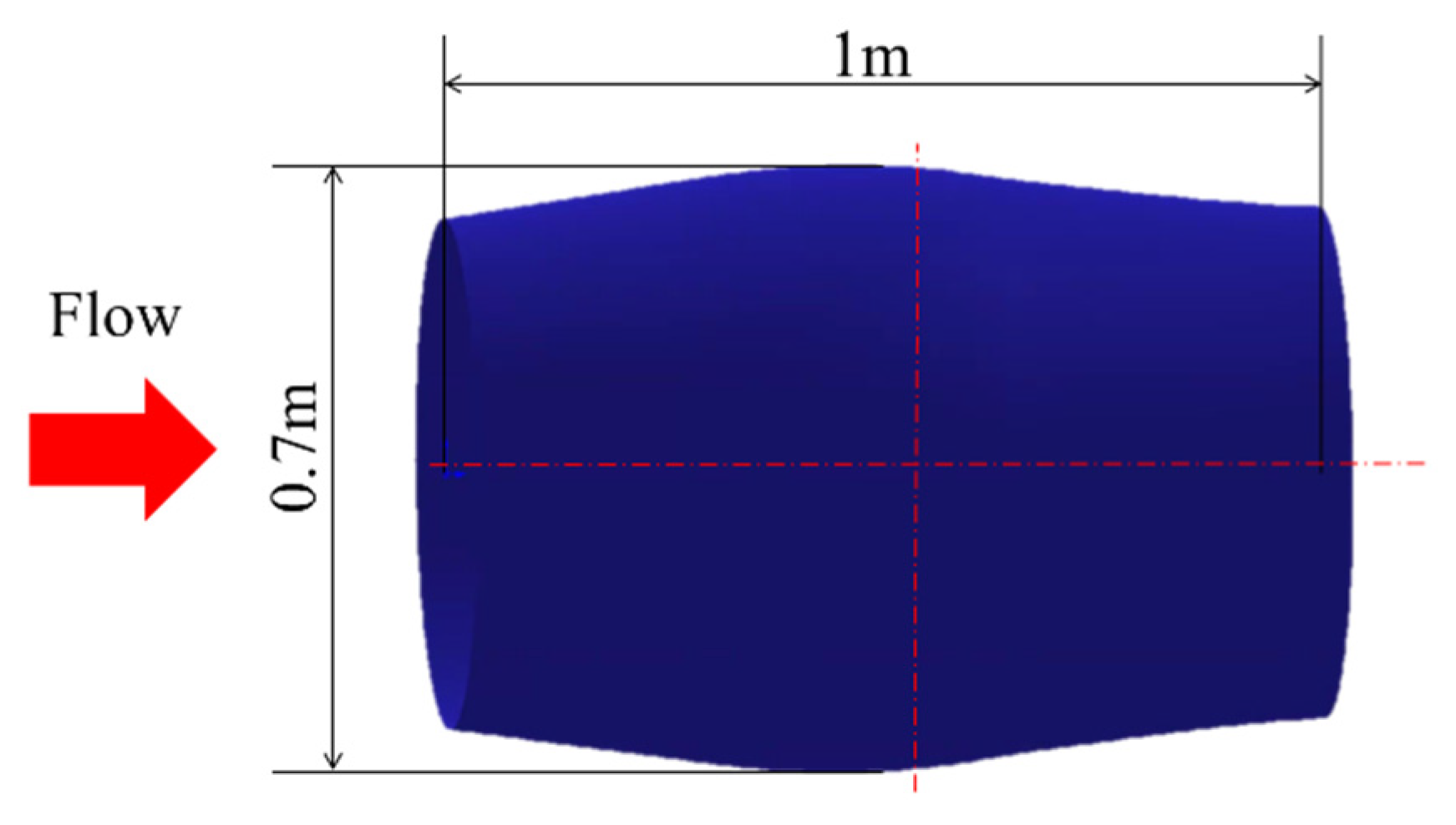
Experiment and Model
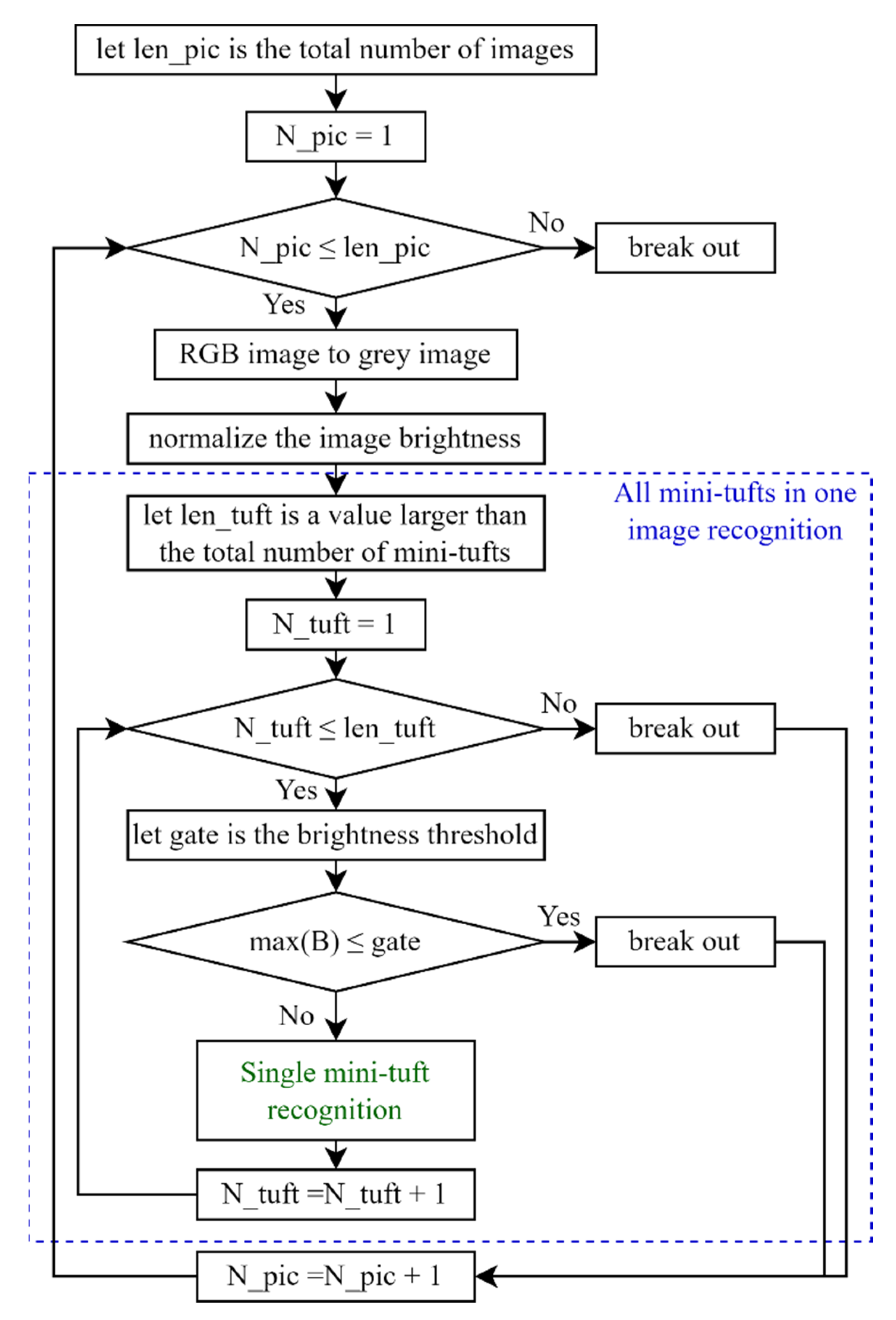
3. Data Processing Method
4. Analysis Processing
5. Results and Discussion
6. Conclusions
- (1)
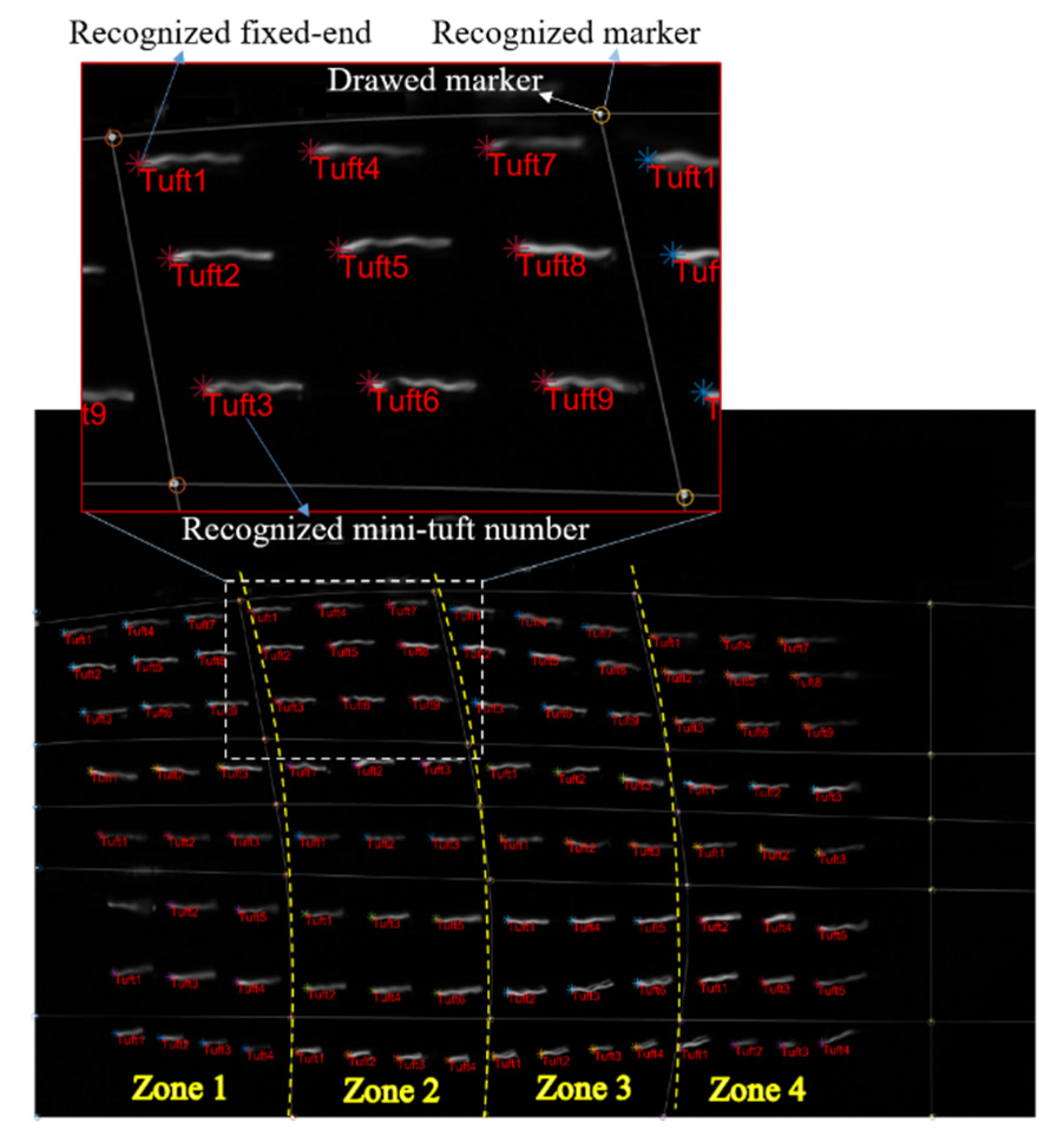
- The time-averaged digital mini-tufts are calculated for analyzing the time-averaged flow behavior. For more intuitive observation of features, the mean digital mini-tufts of each group of the time-averaged digital mini-tufts are calculated. The current method proposed is realized well for the digitalization of mini-tufts.
- (2)
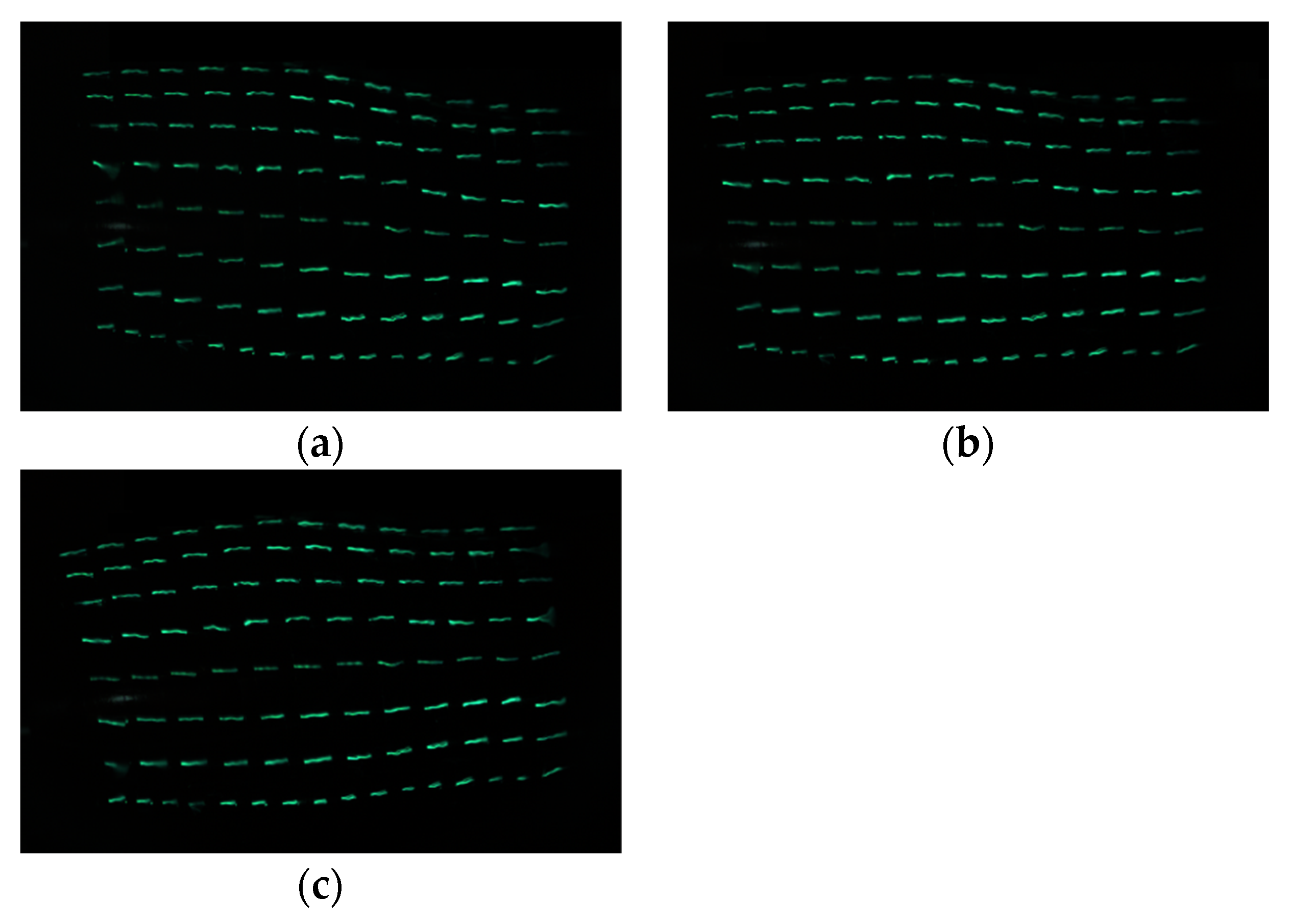
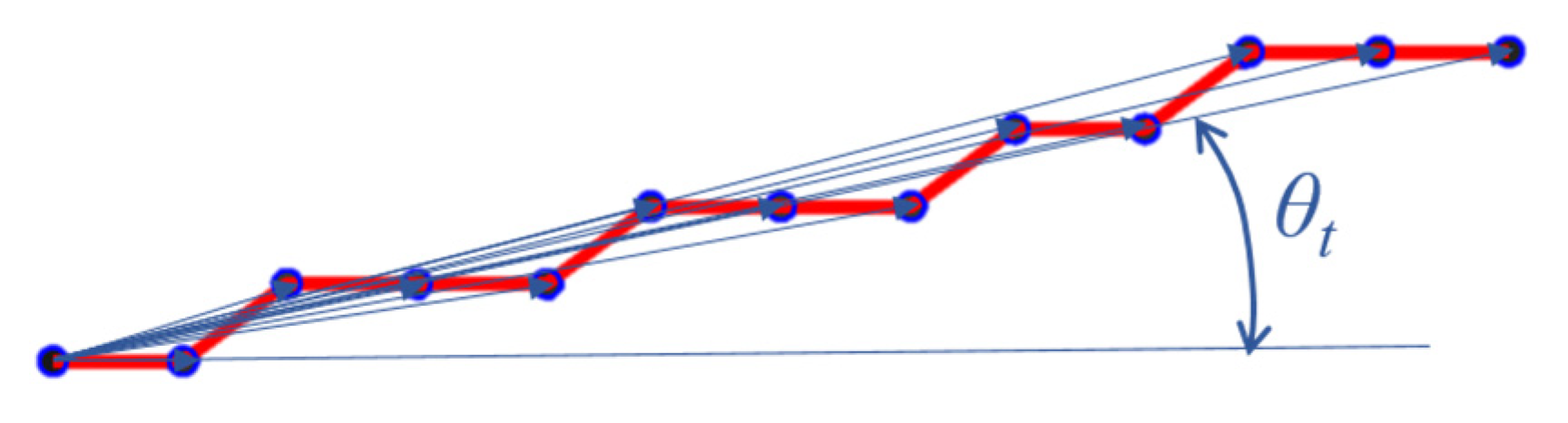
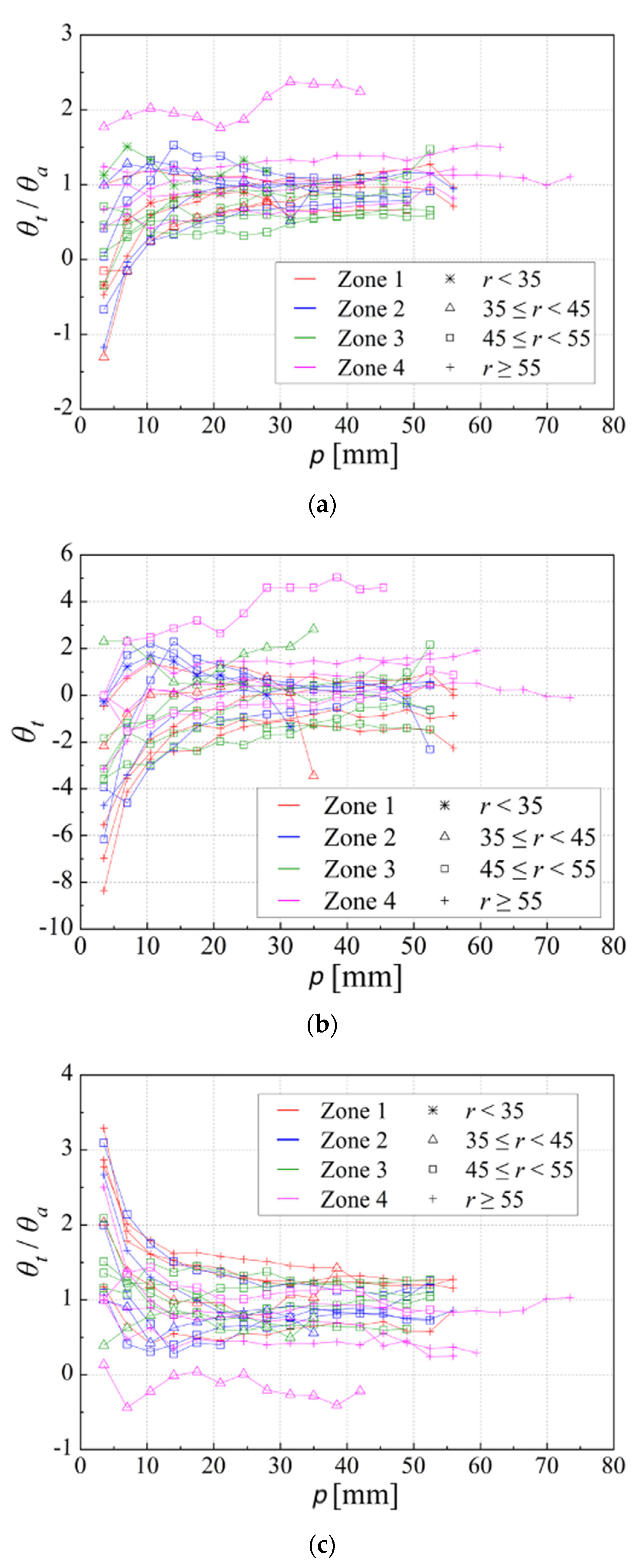
- With regard to the target model in the experiment, though the angle of attack varies, the latter segment (after around 20 mm) of almost all tufts follow the inflow direction on the model surface well.
- (3)
- The mean tuft transient oscillation under the same flow surrounding the same model is not impacted by the angle of attack.
- (4)
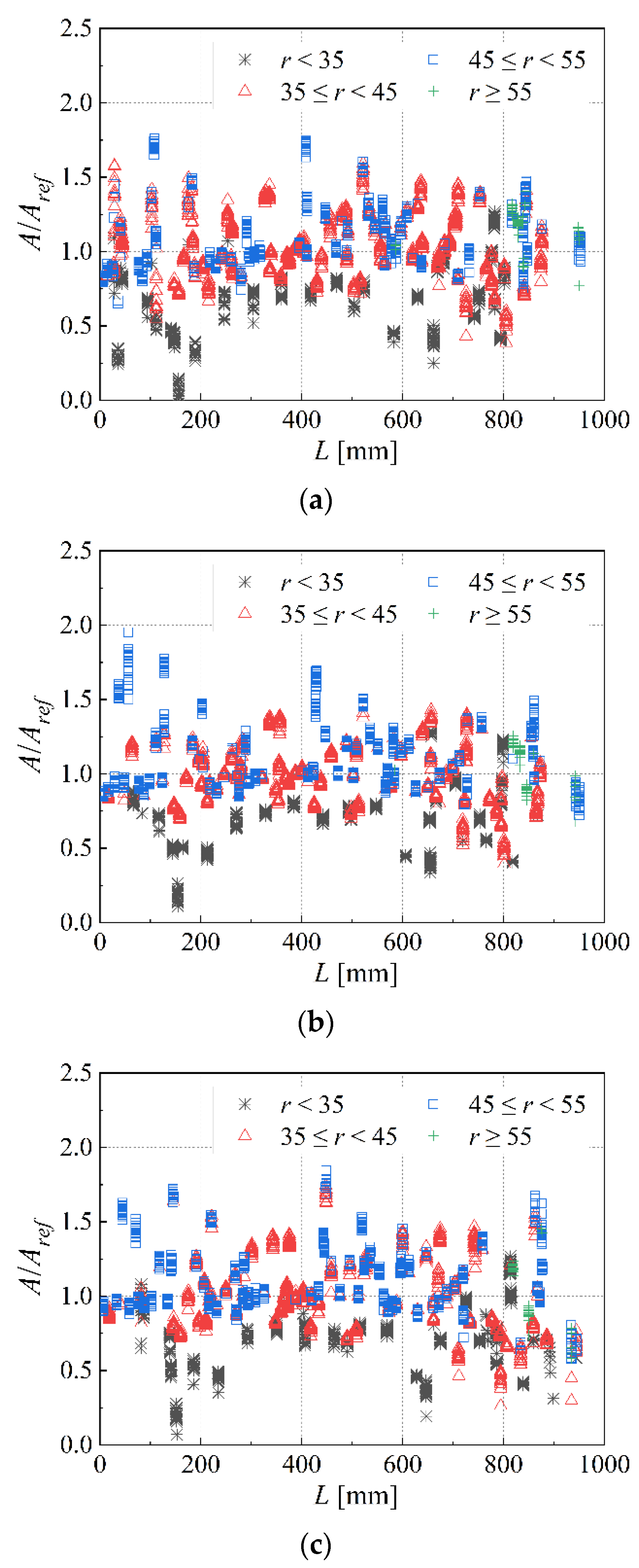
- According to the mean values of A/Aref, the tufts on the middle part of the model are larger than those on the two terminals, which indicates that the transient fluid is oscillating more intensively on the middle part of the irregularity cylinder than on the two terminals of the model.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, L.; Suzuki, T.; Nonomura, T.; Asai, K. Flow visualization and transient behavior analysis of luminescent mini-tufts after a backward-facing step. Flow Meas. Instrum. 2019, 71, 101657. [Google Scholar] [CrossRef]
- Nakayama, Y. Chapter 16—Flow visualization. In Introduction to Fluid Mechanics, 2nd ed.; Nakayama, Y., Ed.; Elsevier: London, UK, 2018. [Google Scholar]
- Stinebring, D.R.; Treaster, A.L. The Use of Fluorescent Mini-Tufts for Hydrodynamic Flow Visualization; Technical Memorandum No. TM-80-07; NAVY Department, The Pennsylvania State University: University Park, PA, USA, 1980. [Google Scholar]
- Foughner, J.T.; Hunter, W.W. Flow Visualization and Laser Velocimetry for Wind Tunnels; NASA Conference Publication: Hampton, VA, USA, 1982.
- Ramamurthi, K.; Tharakan, T.J. Flow visualisation experiments on free draining of a rotating column of liquid using nets and tufts. Exp. Fluids 1996, 21, 139–142. [Google Scholar] [CrossRef]
- Nakajima, R.; Numata, D.; Asai, K. A new approach to surface-flow visualization using fluorescence minitufts. In Proceedings of the 16th International Symposium on Flow Visualization, Okinawa, Japan, 24–27 June 2014. [Google Scholar]
- Mosharov, V.E. Luminescent methods for investigating surface gas flows (Review). Instrum. Exp. Tech. 2009, 52, 1–12. [Google Scholar] [CrossRef]
- Wieser, D.; Bonitz, S.; Lofdahl, L.; Broniewicz, A.; Nayeri, C.; Paschereit, C.; Larsson, L. Surface flow visualization on a full-scale passenger car with quantitative tuft image processing. In Proceedings of the SAE 2016 World Congress and Exhibition, Detroit, MI, USA, 12–14 April 2016. [Google Scholar]
- Wieser, D.; Bonitz, S.; Nayeri, C.N.; Paschereit, C.O.; Broniewicz, A.; Larsson, L.; Löfdahl, L. Quantitative Tuft Flow Visualization on the Volvo S60 under realistic driving Conditions. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, AIAA SciTech, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Swytink-Binnema, N.; Johnson, D.A. Digital tuft analysis of stall on operational wind turbines. Wind. Energy 2016, 19, 703–715. [Google Scholar] [CrossRef]
- Hui, Z.; Hou, J.; Deng, L. Key technologies study of fluorescent mini-tuft application in the low-speed wind tunnel tests. J. Exp. Fluid Mech. 2015, 29, 92–96. [Google Scholar]
- Wang, Z. Some New Applications of the fluorescent mini tuft technique. In Flow Visualization VI; Tanida, Y., Miyashiro, H., Eds.; Springer: Berlin/Heidelberg, Germany, 1992. [Google Scholar]
- Htun, Y.E.; Myint, Z.Y.M. Some principles of flow visualization techniques in wind tunnels. In Proceedings of the 82nd IIER International Conference, Berlin, Germany, 3–4 October 2016. [Google Scholar]
- Stedman, D.H.; Carignan, G.R. Flow Visualization III; Hemisphere Publishing: Washington, DC, USA, 1983. [Google Scholar]
- Settles, G.S. Modern developments in flow visualization. AIAA J. 1986, 24, 1313–1323. [Google Scholar] [CrossRef]
- Nasutia, F. Flow Visualization; Academic Press: New York, NY, USA, 1974. [Google Scholar]
- Asanuma, T. Flow Visualization; Hemisphere Publishing Co.: Tokyo, Japan, 1977. [Google Scholar]
- Ristic, S. Optical methods in wind tunnel flow visualization. FME Trans. 2007, 34, 7–13. [Google Scholar]
- Corlett, W.A. Operational Flow Visualization Technique in the Langley Unitary Plan Wind Tunnel; NASA Conference Publication: Hampton, VA, USA, 1993; p. 2243.
- Ristic, S. Flow visualization techniques in wind tunnels. Part I—Non-optical methods. Sci. Tech. Rev. 2007, 57, 39–49. [Google Scholar]
- Ristic, S. Flow visualization techniques in wind tunnels. Part II—Optical methods. Sci. Tech. Rev. 2007, 57, 38–49. [Google Scholar]
- Omata, N.; Shirayama, S. Extracting quantitative three-dimensional unsteady flow direction from tuft flow visualizations. Fluid Dyn. Res. 2017, 49, 055506. [Google Scholar] [CrossRef]
- Steinfurth, B.; Cura, C.; Gehring, J. Tuft deflection velocimetry: A simple method to extract quantitative flow field information. Exp Fluids 2020, 61, 146. [Google Scholar] [CrossRef]
- Ristic, S.; Kozic, M. Investigation of the possibility to apply the LDA method for the determination of pressure coefficients on a high speed axial pump blade model. Sci. Tech. Rev. 2001, 51, 25–36. [Google Scholar]
- Ristic, S.; Matic, D.; Vitic, A. Determination of aerodynamical coefficients and visualization of the flow around the axisymetrical model by experimental and numerical methods. Sci. Tech. Rev. 2005, 55, 42–49. [Google Scholar]
- Ristic, S.; Isakovic, J.; Sreckovic, M.; Matic, D. Comparative analysis of experimental and numerical flow visualization. FME Trans. 2006, 34, 143–149. [Google Scholar]
- Ocokoljica, G.; Radulovica, J. Flow visualization and aerodynamical coefficients determination for the LASTA-95 model in wind tunnel T-35. Sci. Tech. Rev. 2006, 56, 63–69. [Google Scholar]
- Vey, S.; Lang, H.M.; Nayeri, C.N.; Paschereit, C.O.; Pechlivanoglou, G. Extracting quantitative data from tuft flow visualizations on utility scale wind turbines. J. Phys. Conf. Ser. 2014, 524, 012011. [Google Scholar] [CrossRef]
- Bonitz, S.; Wieser, D.; Broniewicz, A.; Larsson, L.; Lofdahl, L.; Nayeri, C.N.; Paschereit, C. Experimental investigation of the near wall flow downstream of a passenger car wheel arch. SAE Int. J. Passenger Cars Mech. Syst. 2018, 11, 22–34. [Google Scholar] [CrossRef]
- Chen, L.; Suzuki, T.; Nonomura, T.; Asai, K. Characterization of luminescent mini-tufts in quantitative flow visualization experiments: Surface flow analysis and modelization. Exp. Therm. Fluid Sci. 2019, 103, 406–417. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tuft Length | θa = 4° | θa = 0° | θa = −4° |
|---|---|---|---|
| r < 35 | 0.65 | 0.67 | 0.69 |
| 35 ≤ r < 45 | 1.12 | 0.97 | 0.98 |
| 45 ≤ r < 55 | 1.10 | 1.13 | 1.12 |
| r ≥ 55 | 1.17 | 1.06 | 1.00 |
| Zone Number | Mean | Square Deviation |
|---|---|---|
| 1 | 0.89 | 0.23 |
| 2 | 1.02 | 0.17 |
| 3 | 1.02 | 0.20 |
| 4 | 0.96 | 0.22 |
| Zone Number | Mean | Square Deviation |
|---|---|---|
| 1 | 0.97 | 0.25 |
| 2 | 1.03 | 0.16 |
| 3 | 0.99 | 0.19 |
| 4 | 0.91 | 0.22 |
| Zone Number | Mean | Square Deviation |
|---|---|---|
| 1 | 0.96 | 0.22 |
| 2 | 1.04 | 0.17 |
| 3 | 0.99 | 0.20 |
| 4 | 0.92 | 0.28 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, S.; Chen, L. Digitalization and Quantitative Flow Visualization of Surrounding Flow over a Specially-Shaped Column-Frame by Luminescent Mini-Tufts Method. Aerospace 2022, 9, 507. https://doi.org/10.3390/aerospace9090507
Ma S, Chen L. Digitalization and Quantitative Flow Visualization of Surrounding Flow over a Specially-Shaped Column-Frame by Luminescent Mini-Tufts Method. Aerospace. 2022; 9(9):507. https://doi.org/10.3390/aerospace9090507
Chicago/Turabian StyleMa, Shuang, and Lin Chen. 2022. "Digitalization and Quantitative Flow Visualization of Surrounding Flow over a Specially-Shaped Column-Frame by Luminescent Mini-Tufts Method" Aerospace 9, no. 9: 507. https://doi.org/10.3390/aerospace9090507