
Predicting the Remaining Useful Life of Landing Gear with Prognostics and Health Management (PHM)


Abstract
:1. Introduction
Current Maintenance Practice
- After 300 h or after 1 year in service: inspection.
- Nitrogen pressure check of shock absorber.
- After 600 h: inspections.
- Visual inspections of landing gear hinge points.
- Leak inspection (oil, hydraulic fluid, etc.).
- Inspection of torque links.
- After 1600 flight hours: perform a full inspection, which takes about 150 h.
2. Problem Statement
2.1. The Landing Gear Shimmy Effect
2.2. Challenges to Integrating the PdM Technique with Existing Aircraft Platforms
- Technology and frameworks are available but underutilized.
- Performance characteristics are usually untested, leading to a lack of confidence.
- Although a wealth of data is often available from end users, access to this data can be limited and much of it has yet to be converted to meaningful information.
3. Methodology
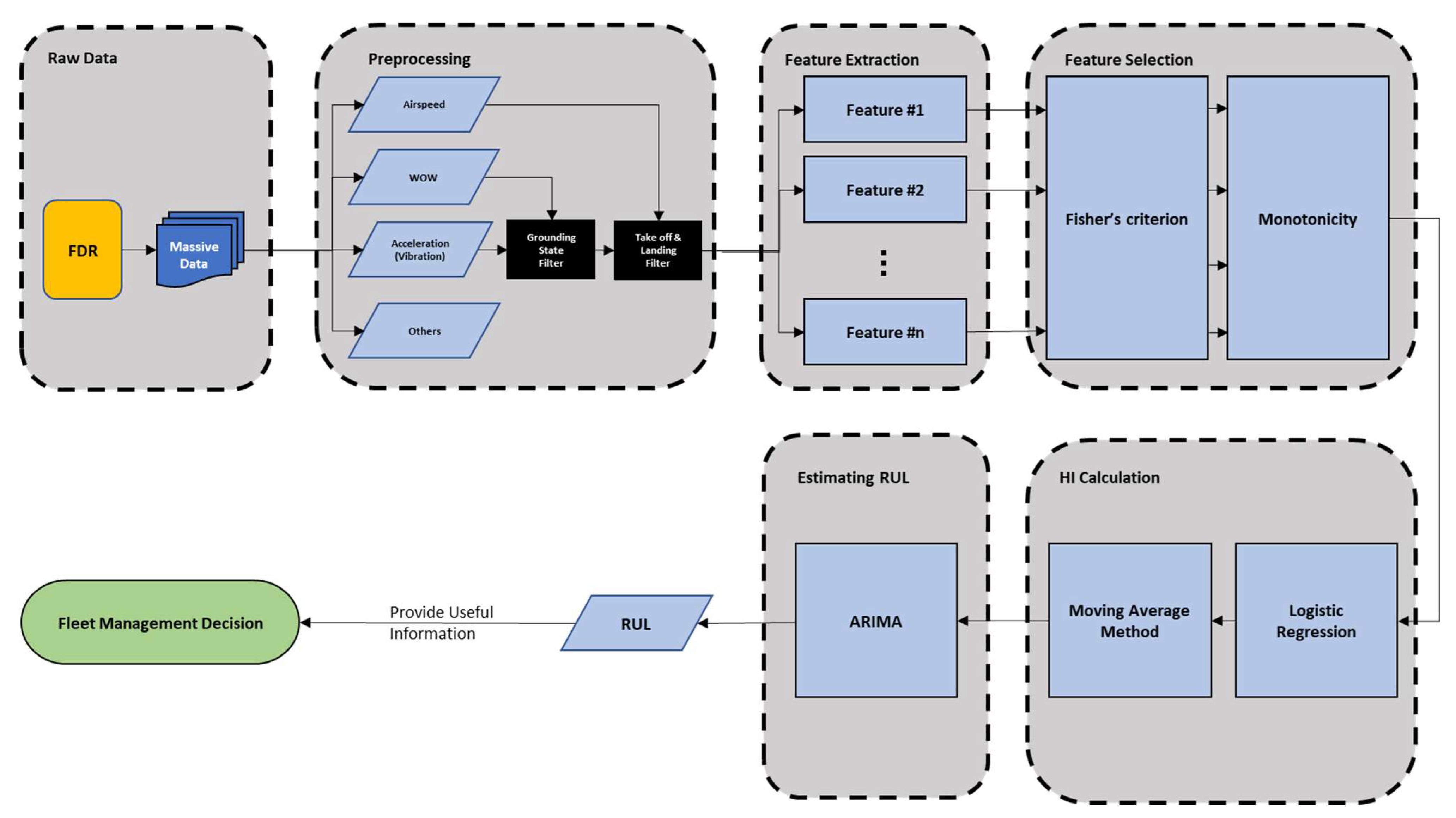
3.1. Introducing the Proposed Methodology Based on the PHM Framework
3.1.1. Preprocessing
3.1.2. Feature Definition
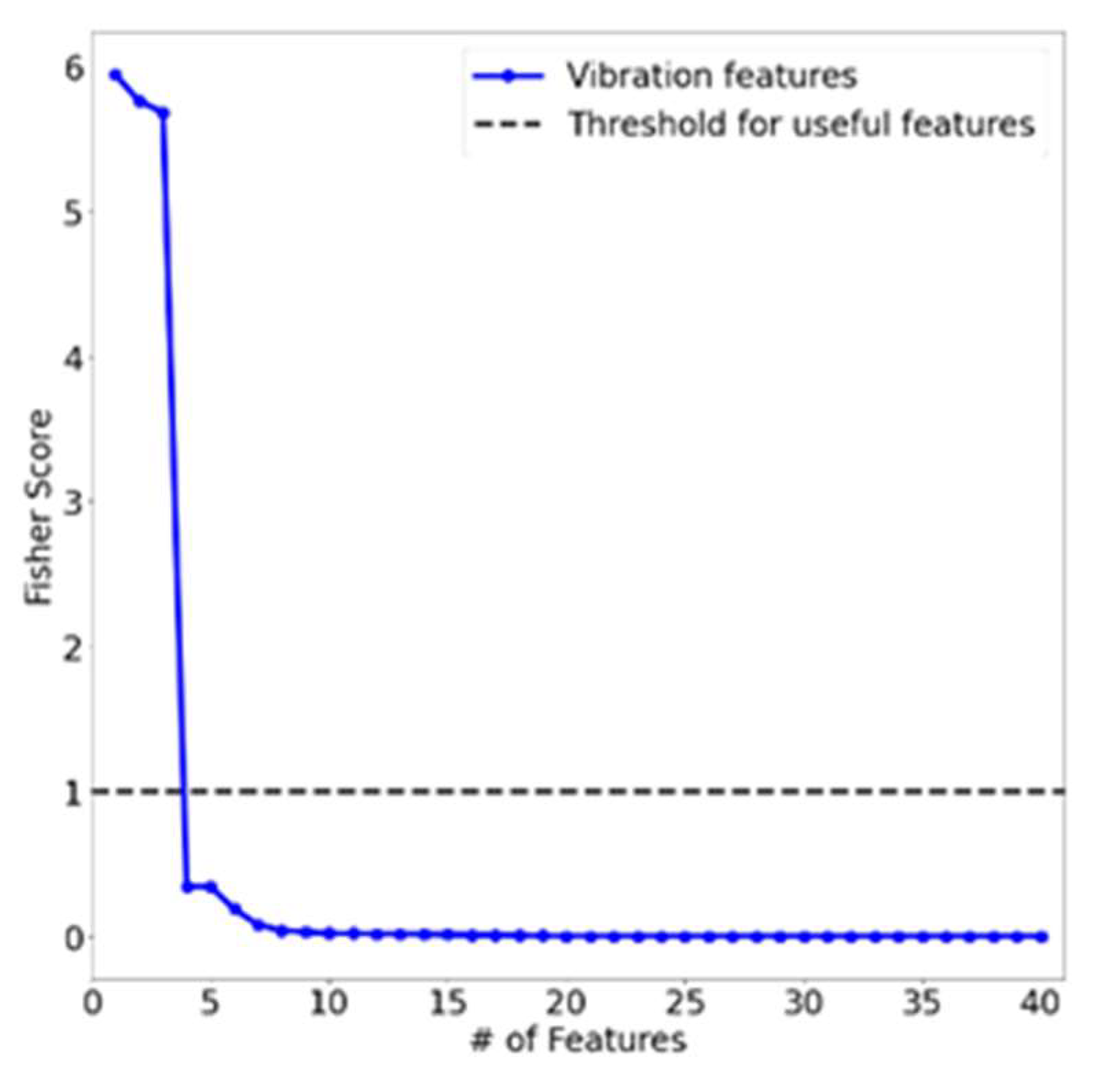
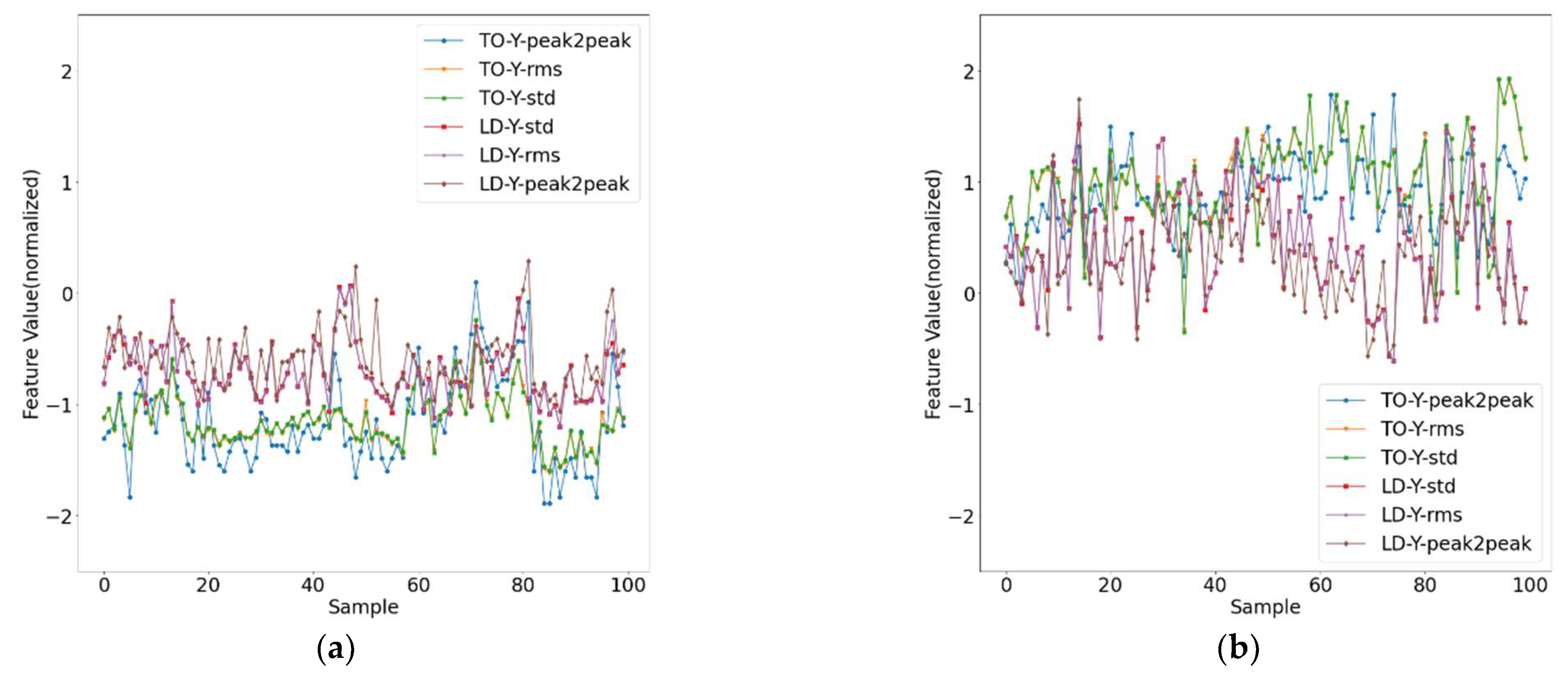
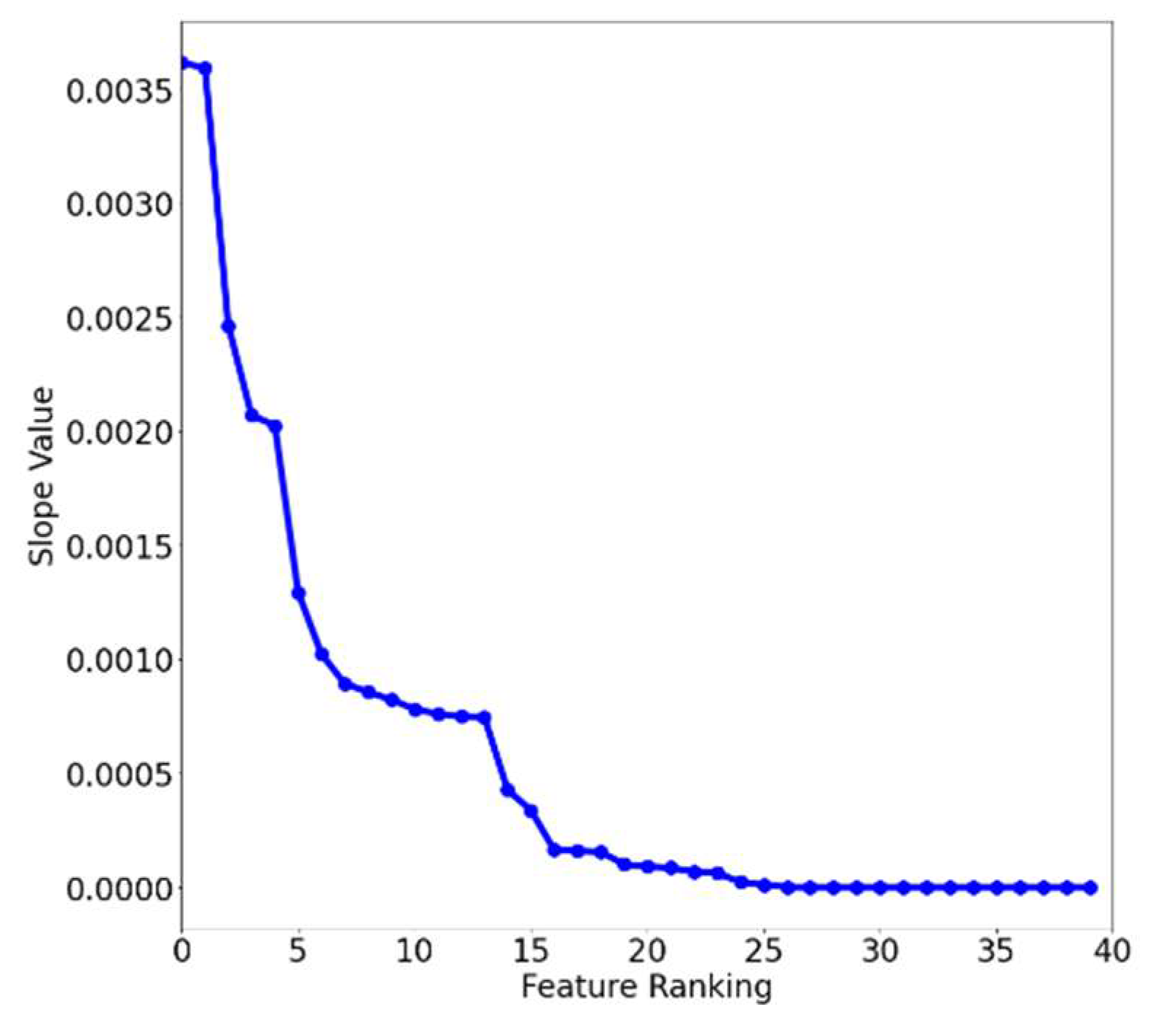
3.1.3. Feature Selection
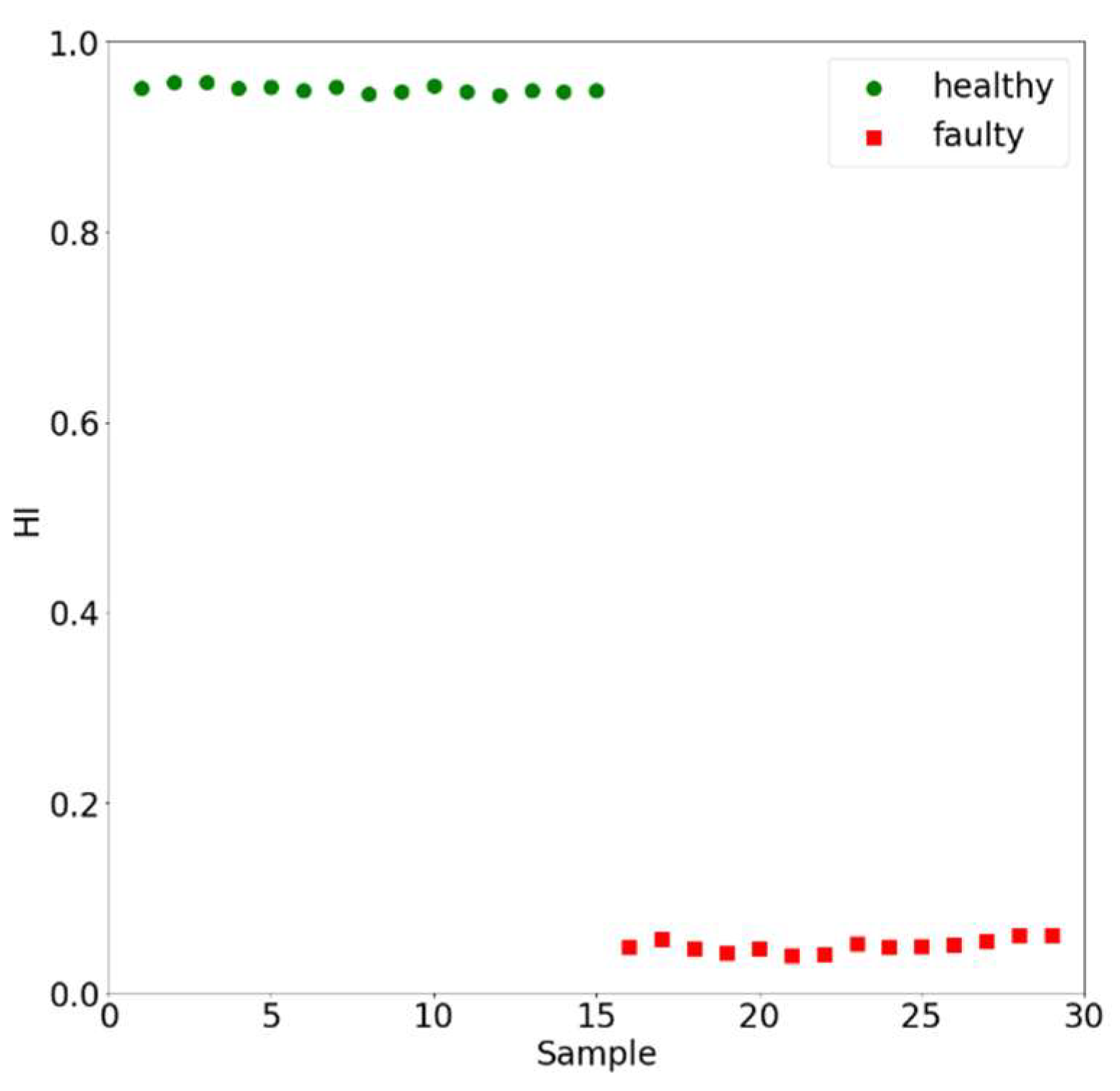
3.2. Calculating the Health Indicator Using the Logistic Regression Method
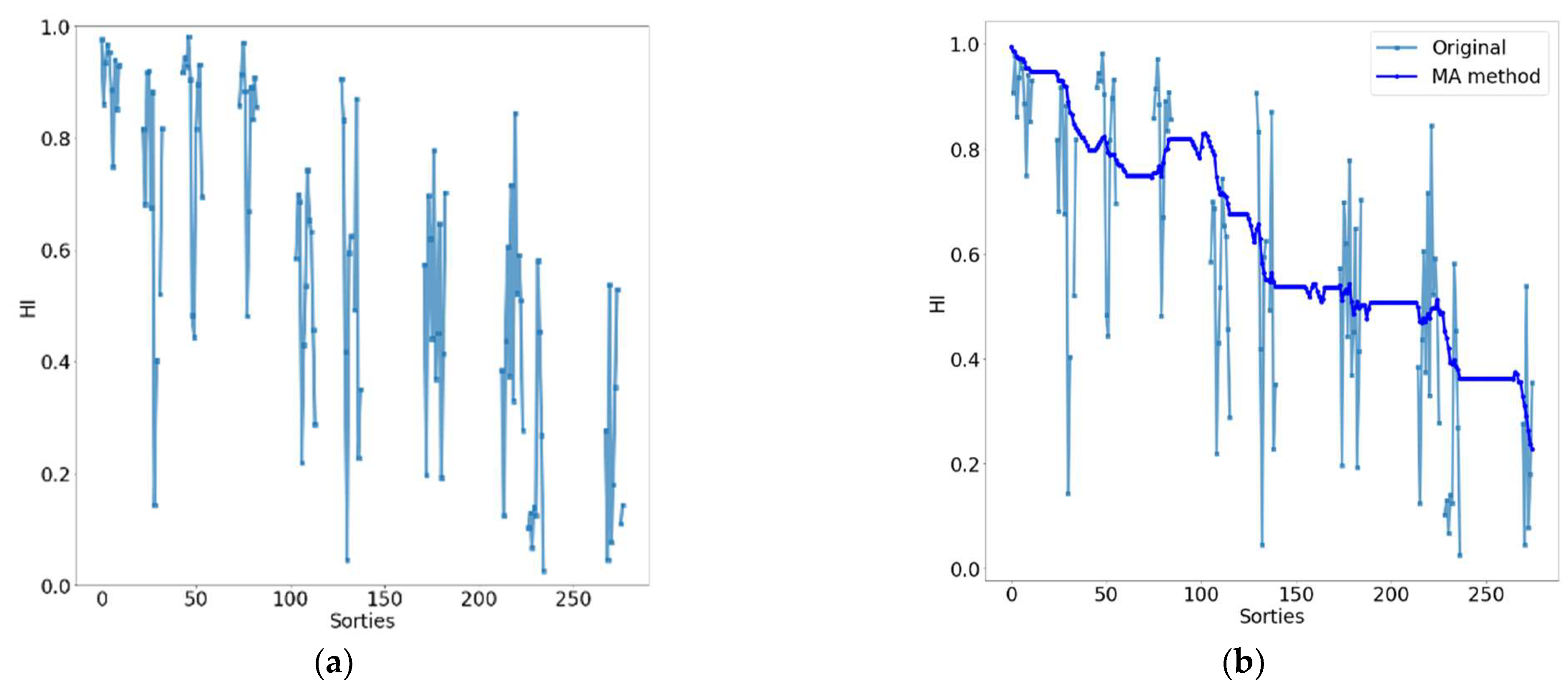
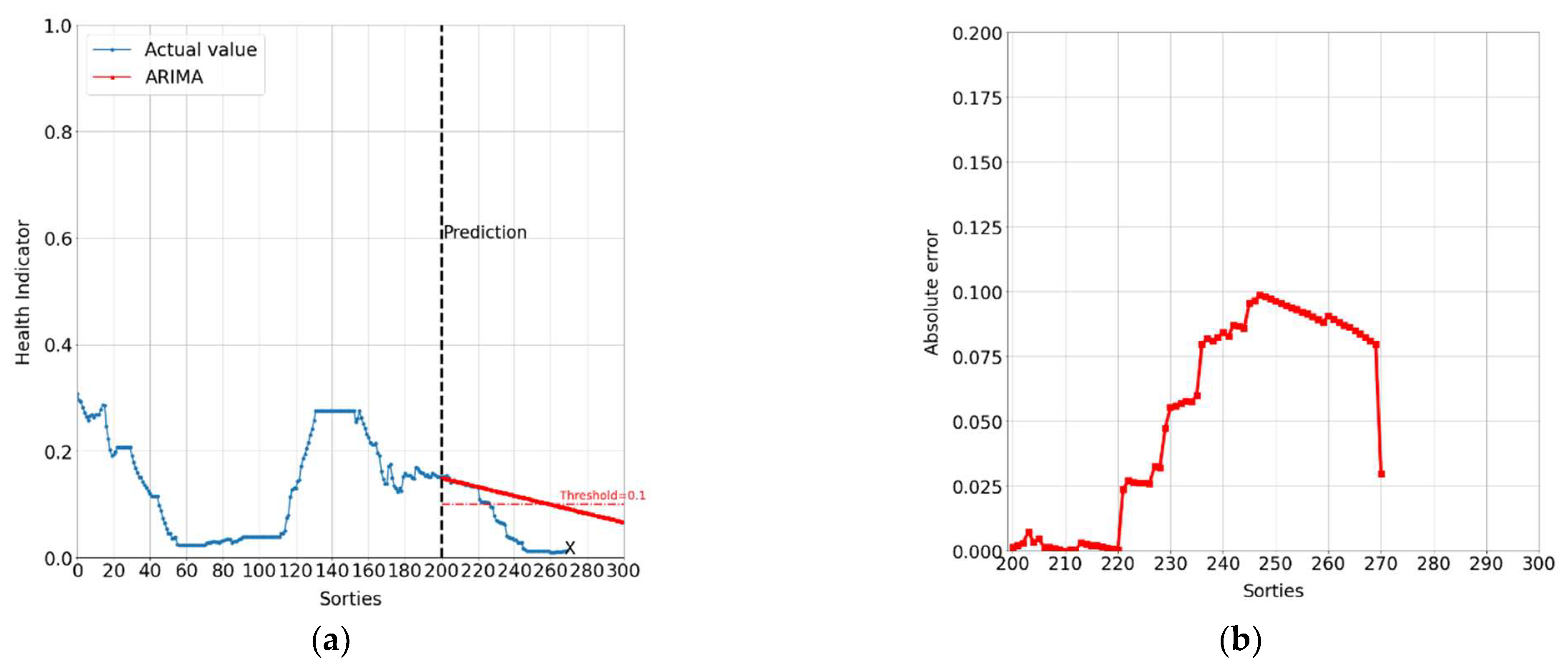
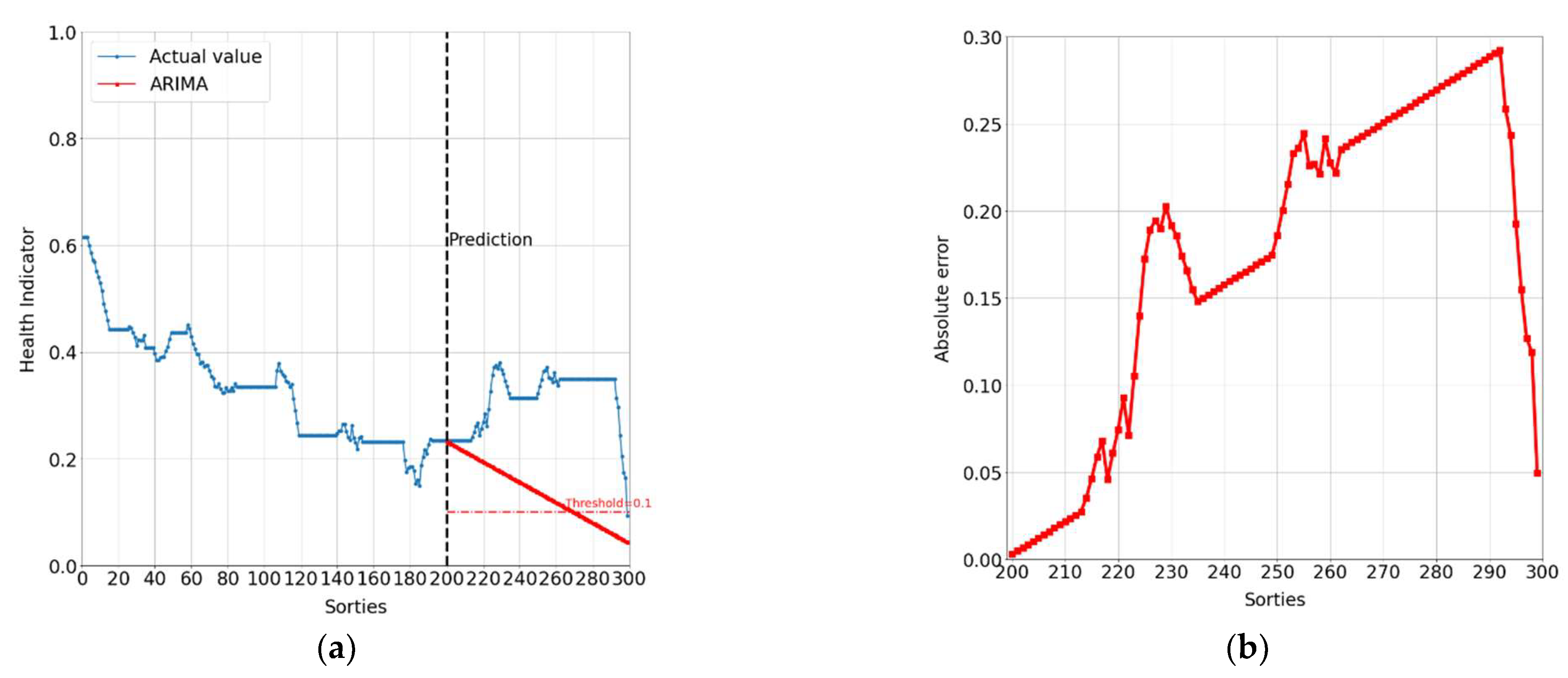
3.3. Predicting the Degradation Using the Moving Average Method and The ARIMA Model
4. Results and Discussion
4.1. Health Indicator
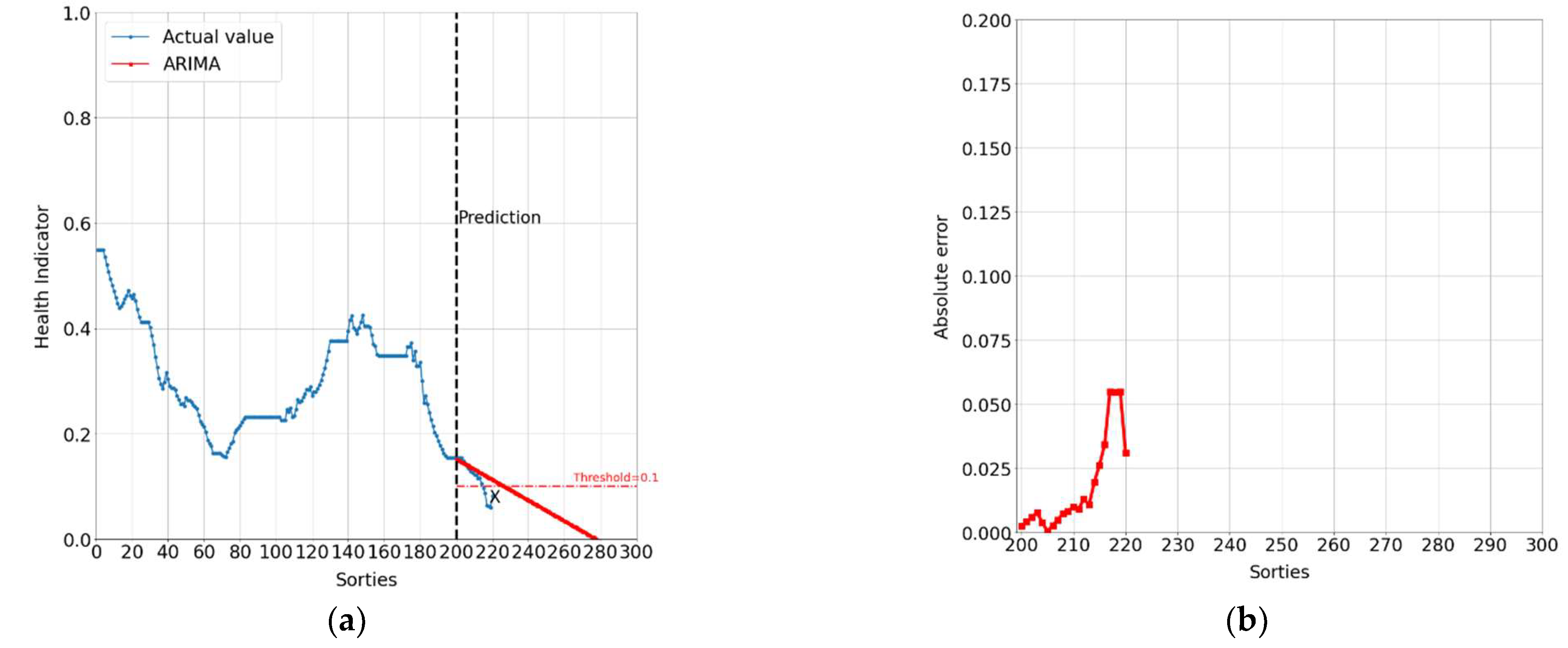
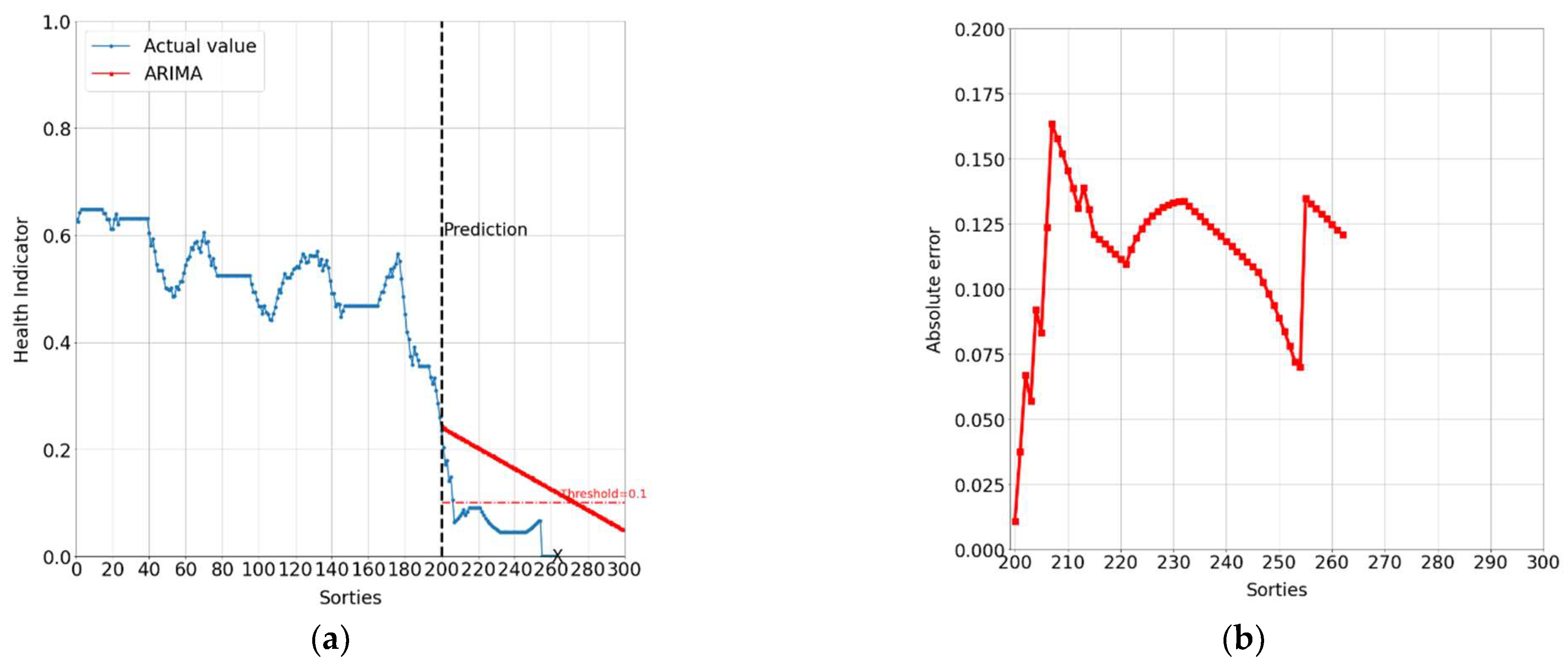
4.2. Remaining Useful Life
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Czaban, M. Aircraft Corrosion—Review of Corrosion Processes and Its Effects in Selected Cases. Fatigue Aircr. Struct. 2018, 2018, 5–20. [Google Scholar] [CrossRef] [Green Version]
- Szrama, S.; Gill, A. Aircraft Operators Maintenance Decisions Supporting Method. Arch. Transp. 2021, 59, 93–111. [Google Scholar]
- Nowlan, F.S.; Heap, H.F. Reliability-Centered Maintenance; United Air Lines Inc.: San Francisco, CA, USA, 1978. [Google Scholar]
- Dhillon, B.S. Engineering Maintenance: A Modern Approach; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Chalifoux, A.; Baird, J. Reliability Centered Maintenance (RCM) Guide Operating a More Effective Maintenance Program; Construction Engineering Research Lab (Army): Champaign, IL, USA, 1999. [Google Scholar]
- Rausand, M.; Vatn, J. Reliability Centred Maintenance. In Complex System Maintenance Handbook; Springer: London, UK, 2008; pp. 79–108. [Google Scholar]
- Phillips, P.; Diston, D.; Starr, A.; Payne, J.; Pandya, S. A Review on the Optimisation of Aircraft Maintenance with Application to Landing Gears. In Engineering Asset Lifecycle Management; Kiritsis, D., Emmanouilidis, C., Koronios, A., Mathew, J., Eds.; Springer: London, UK, 2010; pp. 68–76. [Google Scholar]
- F-16s Gear Maintenance Is “Big Issue”. Available online: https://www.f-16.net/f-16-news-article2160.html (accessed on 16 May 2022).
- Kählert, A. Specification and Evaluation of Prediction Concepts in Aircraft Maintenance. Ph.D. Thesis, Technische Universität Darmstadt, Darmstadt, Germany, 2017. [Google Scholar]
- Heisey, R. Aero Magazine; Boeing Commercial Airplanes Group: Seattle, DA, USA, 2002; pp. 18–29. [Google Scholar]
- Knotts, R.M.H. Civil Aircraft Maintenance and Support Fault Diagnosis from a Business Perspective. J. Qual. Maint. Eng. 1999, 5, 335–348. [Google Scholar] [CrossRef]
- Lernbeiss, R.; Plöchl, M. Simulation Model of an Aircraft Landing Gear Considering Elastic Properties of the Shock Absorber. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2007, 221, 77–86. [Google Scholar] [CrossRef]
- Krüger, W.; Morandini, M. Numerical Simulation of Landing Gear Dynamics: State-of-the-Art and Recent Developments. In Proceedings of the AVT-152 Symposium on Limit Cycle Oscillation and Other Amplitude-Limited Self-Excited Vibrations, Loen, Norway, 1 January 2008. [Google Scholar]
- Smiley, R.F. Correlation, Evaluation, and Extension of Linearized Theories for Tire Motion and Wheel Shimmy; National Advisory Committee for Aeronautics: Moffett Field, CA, USA, 1956. [Google Scholar]
- Besselink, I.J.M. Shimmy of Aircraft Main Landing Gears. Ph.D. Thesis, Technische Universiteit Delft, Delft, The Netherlands, 2000. [Google Scholar]
- Arreaza, C.; Behdinan, K.; Zu, J.W. Linear Stability Analysis and Dynamic Response of Shimmy Dampers for Main Landing Gears. J. Appl. Mech. 2016, 83, 081002. [Google Scholar] [CrossRef]
- Krüger, W.; Besselink, I.; Cowling, D.; Doan, D.B.; Kortüm, W.; Krabacher, W. Aircraft Landing Gear Dynamics: Simulation and Control. Veh. Syst. Dyn. 1997, 28, 119–158. [Google Scholar] [CrossRef]
- Plakhtienko, N.P.; Shifrin, B.M. Critical Shimmy Speed of Nonswiveling Landing-Gear Wheels Subject to Lateral Loading. Int. Appl. Mech. 2006, 42, 1077–1084. [Google Scholar] [CrossRef]
- Khapane, P.D. Gear Walk Instability Studies Using Flexible Multibody Dynamics Simulation Methods in SIMPACK. Aerosp. Sci. Technol. 2006, 10, 19–25. [Google Scholar] [CrossRef]
- Denti, E.; Fanteria, D. Models of Wheel Contact Dynamics: An Analytical Study on the In-Plane Transient Responses of a Brush Model. Veh. Syst. Dyn. 2000, 34, 199–225. [Google Scholar] [CrossRef]
- Lok, S.K.; Paul, J.M.; Upendranath, V. Prescience Life of Landing Gear Using Multiaxial Fatigue Numerical Analysis. Procedia Eng. 2014, 86, 775–779. [Google Scholar] [CrossRef] [Green Version]
- Xue, C.J.; Dai, J.H.; Wei, T.; Liu, B.; Deng, Y.Q.; Ma, J. Structural Optimization of a Nose Landing Gear Considering Its Fatigue Life. J. Aircr. 2012, 49, 225–236. [Google Scholar] [CrossRef]
- Smeulers, J.P.M.; Zeelen, R.; Bos, A. PROMIS—A Generic PHM Methodology Applied to Aircraft Subsystems. Proc. IEEE Aerosp. Conf. 2002, 6, 6. [Google Scholar]
- Lee, J.; Wu, F.; Zhao, W.; Ghaffari, M.; Liao, L.; Siegel, D. Prognostics and Health Management Design for Rotary Machinery Systems—Reviews, Methodology and Applications. Mech. Syst. Signal Process. 2014, 42, 314–334. [Google Scholar] [CrossRef]
- Wang, Z.; Cui, Y.; Shi, J. A Framework of Discrete-Event Simulation Modeling for Prognostics and Health Management (PHM) in Airline Industry. IEEE Syst. J. 2017, 11, 2227–2238. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, J.; Pan, F. Fault Detection and Diagnosis for Data Incomplete Industrial Systems with New Bayesian Network Approach. J. Syst. Eng. Electron. 2013, 24, 500–511. [Google Scholar] [CrossRef]
- Niu, G.; Jiang, J. Prognostic Control-Enhanced Maintenance Optimization for Multi-Component Systems. Reliab. Eng. Syst. Saf. 2017, 168, 218–226. [Google Scholar] [CrossRef]
- Gu, J.; Vichare, N.; Tracy, T.; Pecht, M. Prognostics Implementation Methods for Electronics. In Proceedings of the 2007 Annual Reliability and Maintainability Symposium, Orlando, FL, USA, 22–25 January 2007; pp. 101–106. [Google Scholar]
- Vichare, N.M.; Pecht, M.G. Prognostics and Health Management of Electronics. IEEE Trans. Compon. Packag. Technol. 2006, 29, 222–229. [Google Scholar] [CrossRef]
- Hecht, H. Why Prognostics for Avionics? In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006; p. 6. [Google Scholar]
- Lei, Y.; He, Z.; Zi, Y.; Hu, Q. Fault Diagnosis of Rotating Machinery Based on Multiple ANFIS Combination with GAs. Mech. Syst. Signal Process. 2007, 21, 2280–2294. [Google Scholar] [CrossRef]
- Guyon, I.; Elisseeff, A. An Introduction to Variable and Feature Selection. J. Mach. Learn. Res. 2003, 3, 1157–1182. [Google Scholar] [CrossRef] [Green Version]
- Li, P.; Jia, X.; Feng, J.; Davari, H.; Qiao, G.; Hwang, Y.; Lee, J. Prognosability Study of Ball Screw Degradation Using Systematic Methodology. Mech. Syst. Signal Process. 2018, 109, 45–57. [Google Scholar] [CrossRef]
- Fukunaga, K. Introduction to Statistical Pattern Recognition; Elsevier: Amsterdam, The Netherlands, 2013; ISBN 978-0-08-047865-4. [Google Scholar]
- Hosmer, D.W., Jr.; Lemeshow, S.; Sturdivant, R.X. Applied Logistic Regression; John Wiley & Sons: Hoboken, NJ, USA, 2013; ISBN 978-0-470-58247-3. [Google Scholar]
- Cao, X.; Jiang, P.; Zhou, G. Facility Health Maintenance through SVR-Driven Degradation Prediction. Int. J. Mater. Prod. Technol. 2008, 33, 185–193. [Google Scholar] [CrossRef]
- Houston, W.M.; Woodruff, D.J. Empirical Bayes Estimates of Parameters from the Logistic Regression Model; ACT Research Report Series 97-6; ACT Inc.: Iowa City, IA, USA, 1997. [Google Scholar]
- Little, R.J.A.; Rubin, D.B. Statistical Analysis with Missing Data; John Wiley & Sons: Hoboken, NJ, USA, 2019; ISBN 978-0-470-52679-8. [Google Scholar]
- Box, G.E.P.; Jenkins, G.M.; Reinsel, G.C.; Ljung, G.M. Time Series Analysis: Forecasting and Control; John Wiley & Sons: Hoboken, NJ, USA, 2015; ISBN 978-1-118-67492-5. [Google Scholar]
- Adhikari, R.; Agrawal, R.K. An Introductory Study on Time Series Modeling and Forecasting. arXiv 2013, arXiv:1302.6613. [Google Scholar]
- Tirpak, J.A. Lockheed Mixed Up Structural Fasteners in F-35s. Air Force Mag. 2020, 103, 22–24. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Definition |
|---|---|
| Peak-to-peak | |
| Mean | |
| Root mean square | |
| Standard deviation | |
| Skewness | |
| Kurtosis | |
| Crest indicator | |
| Clearance indicator | |
| Shape indicator | |
| Impulse indicator |
| Feature | Ranked by Fisher Score | Ranked by Slope Value |
|---|---|---|
| TO-Y-peak2peak | 1 | 3 |
| TO-Y-rms | 2 | 1 |
| TO-Y-std | 3 | 2 |
| Plane Number | RMSE (40 Sorties Ahead) | RMSE (Till the Last Sorties) | Error Range (Till the Last Sorties) |
|---|---|---|---|
| Plane #1 | 0.037 | 0.065(71 sorties) | [−0.007, 0.099] |
| Plane #2 | 0.114 | 0.195(100 sorties) | [−0.293, −0.003] |
| Plane #3 | 0.025(21 sorties) * | 0.025(21 sorties) | [−0.008, 0.055] |
| Plane #4 | 0.022 | 0.023(56 sorties) | [−0.014, 0.029] |
| Plane #5 | 0.122 | 0.118(63 sorties) | [0.011, 0.163] |
| Plane Number | Predicted RUL (Sorties) | Predicted Maintenance Sortie | Actual Maintenance Sortie | Error (Sorties) |
|---|---|---|---|---|
| Plane #1 | 60 | 260 | 271 | 11 (earlier) |
| Plane #2 | 70 | 270 | N/A * | >30(earlier) * |
| Plane #3 | 27 | 227 | 221 | 6 (behind) |
| Plane #4 | 94 | 294 | 256 | 38 (behind) |
| Plane #5 | 74 | 274 | 263 | 11 (behind) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hsu, T.-H.; Chang, Y.-J.; Hsu, H.-K.; Chen, T.-T.; Hwang, P.-W. Predicting the Remaining Useful Life of Landing Gear with Prognostics and Health Management (PHM). Aerospace 2022, 9, 462. https://doi.org/10.3390/aerospace9080462
Hsu T-H, Chang Y-J, Hsu H-K, Chen T-T, Hwang P-W. Predicting the Remaining Useful Life of Landing Gear with Prognostics and Health Management (PHM). Aerospace. 2022; 9(8):462. https://doi.org/10.3390/aerospace9080462
Chicago/Turabian StyleHsu, Tzu-Hsuan, Yuan-Jen Chang, He-Kai Hsu, Tsung-Ti Chen, and Po-Wen Hwang. 2022. "Predicting the Remaining Useful Life of Landing Gear with Prognostics and Health Management (PHM)" Aerospace 9, no. 8: 462. https://doi.org/10.3390/aerospace9080462