The comparison was based on the airport data from Oslo Gardermoen as shown in
Figure 3. Oslo operates with two independent runways. The terminal is located between these runways. Oslo has been subject to multiple airport management simulations conducted by the German Aerospace Center [
17,
18]. Therefore, knowledge about the operational procedures is available. Moreover, Oslo will also be subject to a human-in-the-loop simulation that assesses the benefits of what-if from a user perspective [
3]. Using the same data set as in this human-in-the-loop simulation enables a comparison between the user demand and the potential raised within this study in future work.
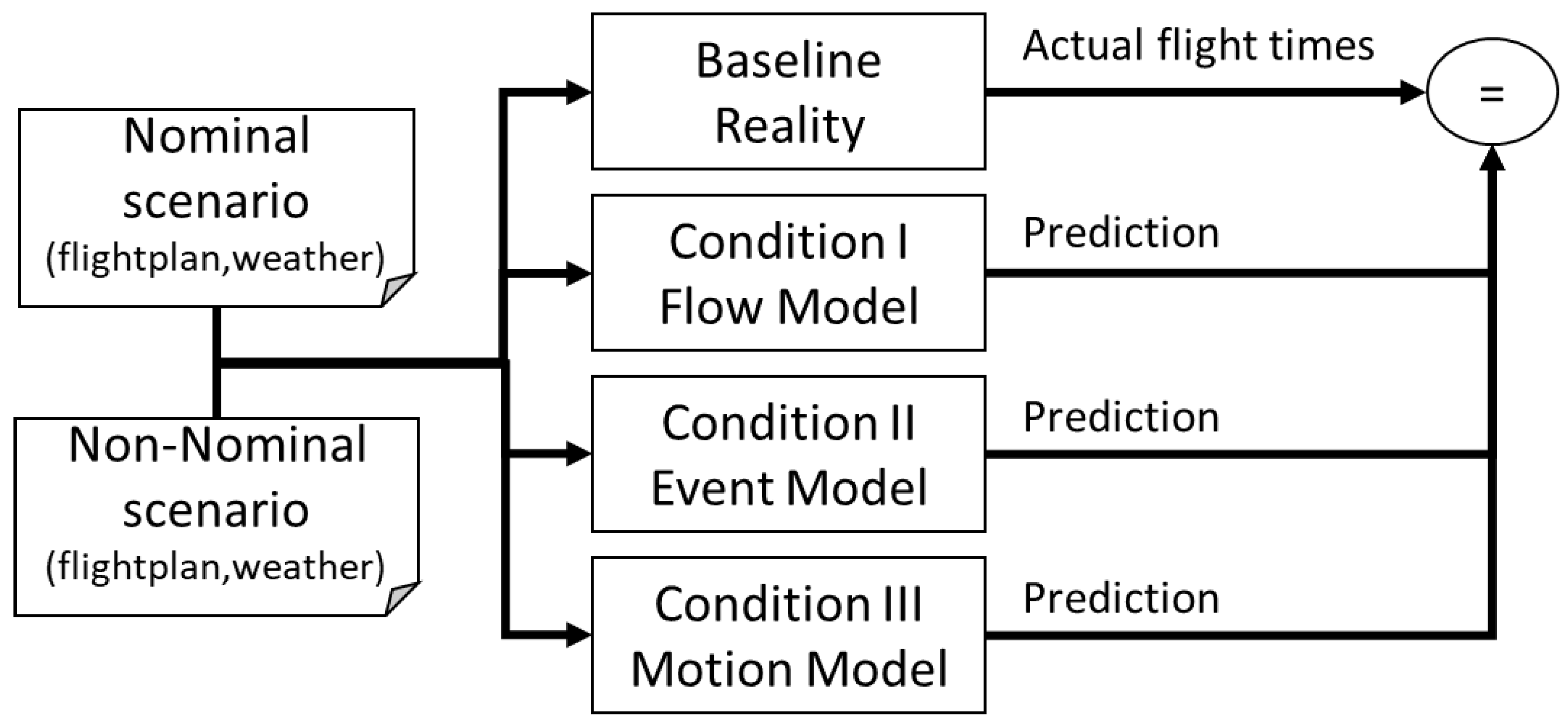
In addition to the airport selection, traffic and weather conditions need to be defined. As stated above, one nominal case and one non-nominal case were evaluated. Judging the precision and calculation speed under these conditions requires real-world complexity within the data. Therefore, two days of operation at Oslo airport were chosen. The flight plan data and the weather data of these days served as the input for the simulation models. The actual flight times provided the baseline results to be compared with the results of each simulation model.
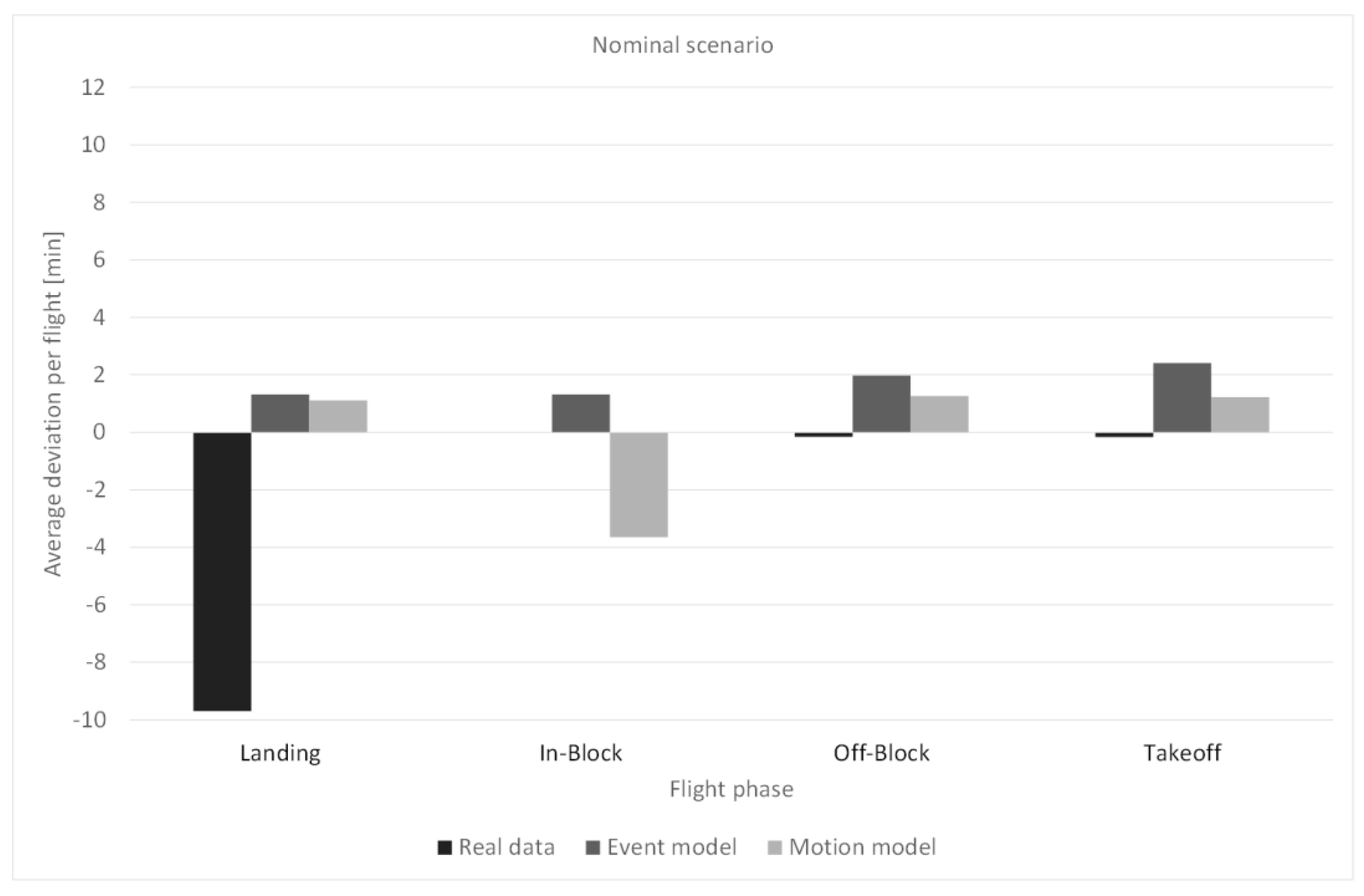
3.2.1. Nominal Scenario
As a nominal day of operation, 15 July 2020 was chosen. The flight plan includes 339 flights and was provided by EUROCONTROL’s Demand Data Repository (DDR2), which has been used as a source for various studies (e.g., [
20,
21,
22]). DDR2 provides SO6 files that are distinguished in two models: M1, which contains trajectories computed by the last filed flight plan, and M3, which is a modified M1 model updated with radar information [
23]. M3 is regarded by the network manager systems as flown trajectories.
The Meteorological Aviation Routine Weather Report (METAR) [
24] describes the weather on 15 July 2020 as stable with air pressures between 1012 hPA and 1009 hPA, temperatures in the range from 12 °C to 19 °C, and temporary showers in the evening. No special weather events (e.g., fog or thunderstorms) were reported. Icing conditions were not present due to the temperature. Therefore, it was concluded that flight operations were not affected by the weather.
An analysis of the trajectory data reveals runway 01L as the active runway throughout the entire day. Although Oslo airport owns two runways (01L and 01R) [
25], only runway 01L was utilized due to the impact of COVID-19 on the global air traffic and the resulting low traffic volume [
26].
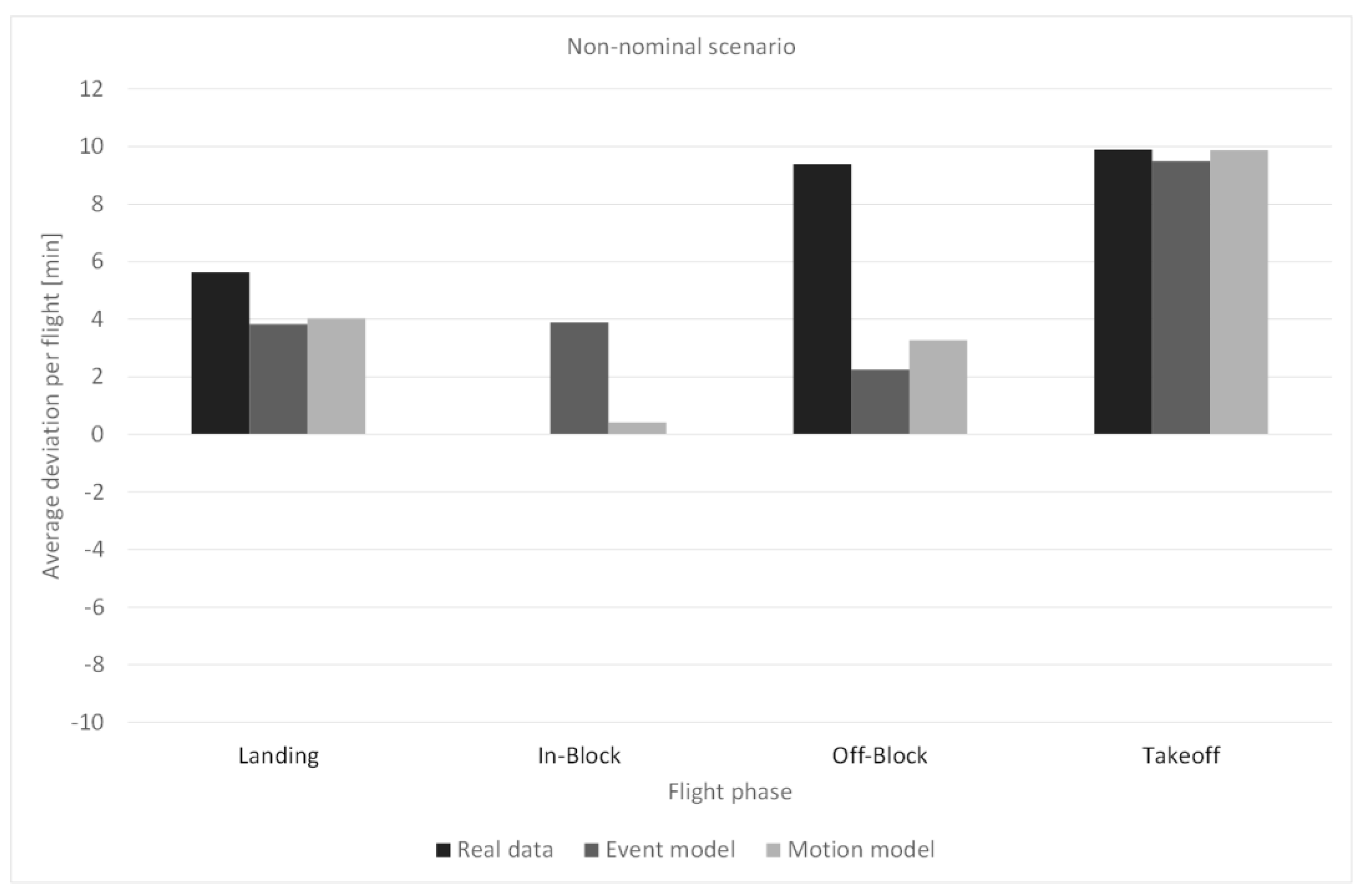
3.2.2. Non-Nominal Scenario
For the non-nominal scenario, 20 October 2020 was chosen. The flight plan data were provided by DDR2 and, besides a similar traffic volume (338 flights), it was taken into consideration that the utilized runway direction (01L) is identical to the nominal scenario. This ensured comparability between the two scenarios.
According to METAR data, the temperatures were in the range from 0 °C to 2 °C and rain showers with a temporary transition to snowfall occurred the entire day. A phase of significant snowfall was reported from 01:00 a.m. to 11:00 a.m. UTC. These weather conditions are a common challenge for Oslo airport in the winter season [
1].
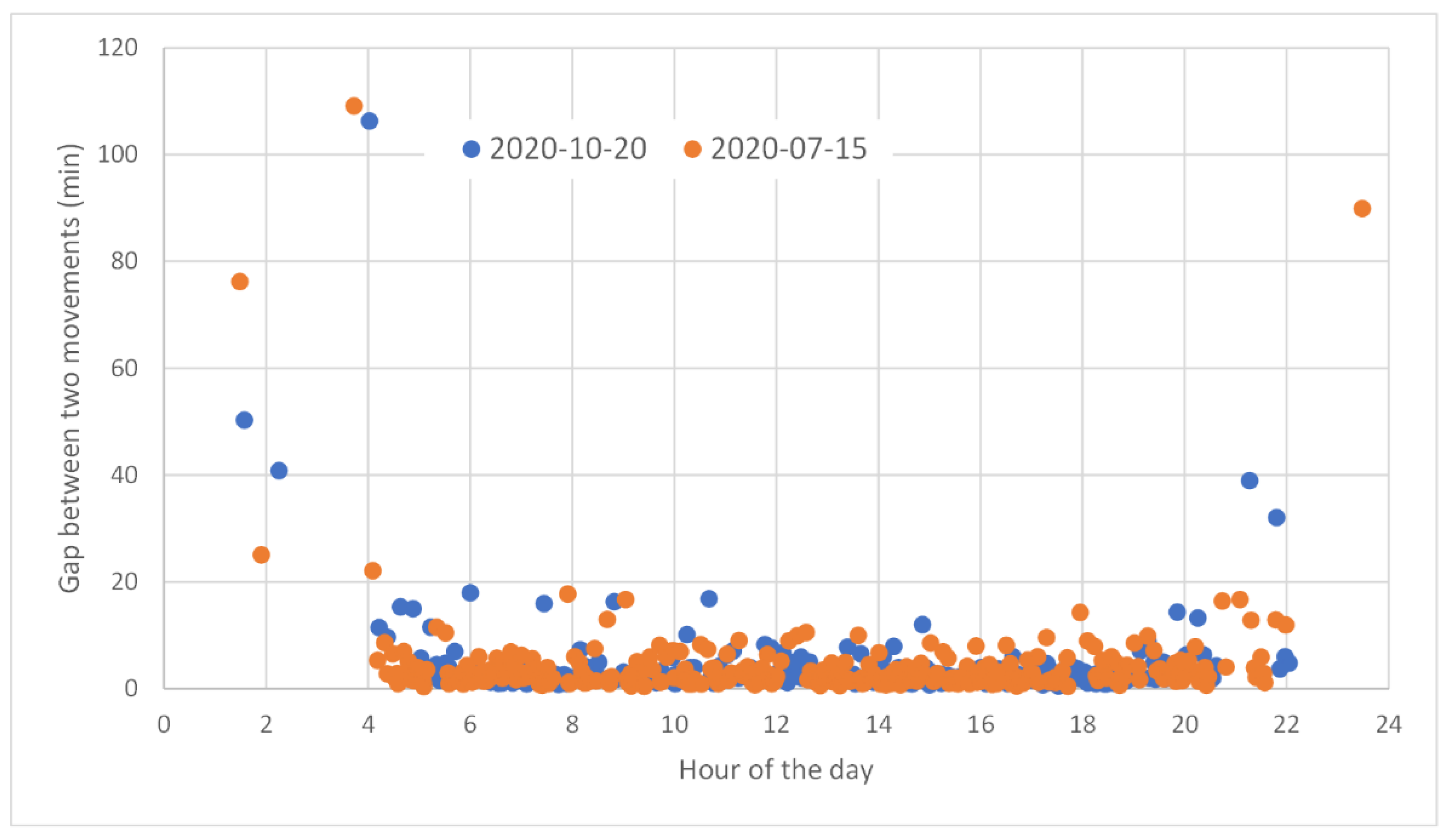
Based on the weather conditions and the traffic data, operational limitations can be derived. Snowfall affects the runway system by covering the surface and reducing friction. Therefore, snow removal is an important action to take to ensure safe runway operations. We analyzed the timestamps of the runway movements to find gaps greater than 15 min between two consecutive movements that could indicate a temporary runway closure for snow removal during the period of snowfall (cf.,
Figure 4).
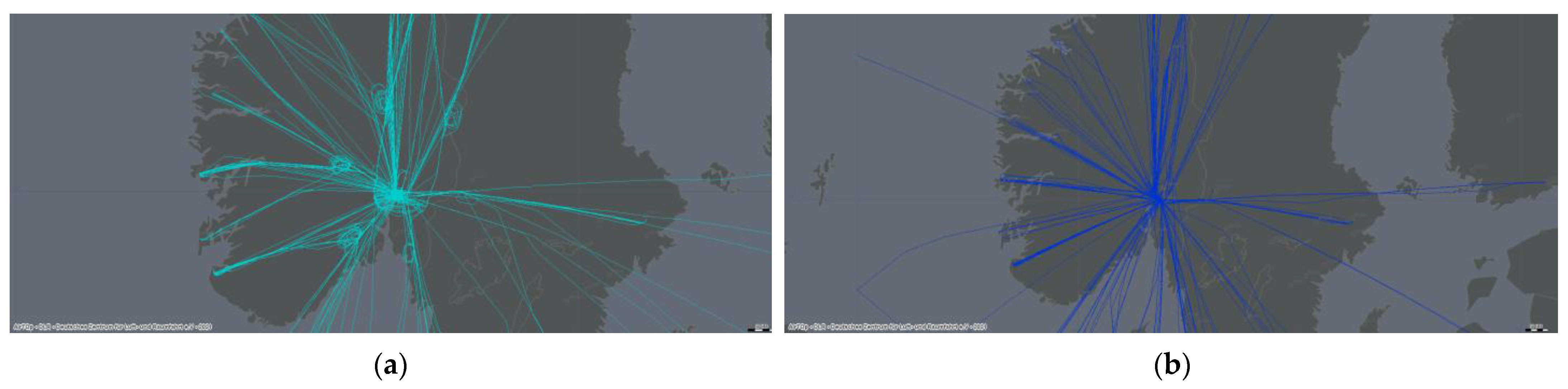
Additionally, the real flown trajectories (arrival and departure flights) of the respective days were considered in order to precisely determine the timestamps since the gaps between two movements are not the sole indicator of snow removal. Gaps greater than 15 min were excluded if they occurred during periods of low traffic demand, e.g., from 00:00 a.m. to 05:00 a.m. UTC. Afterwards, four striking timestamps were apparent on 20 October 2020, namely at 05:40 a.m., 07:10 a.m., 08:30 a.m., and 10:25 a.m. UTC, where each gap was about 20 min between two movements. In our view, it can be concluded that these four gaps resulted from the removal of snow from the runway because of their consistent interval (in each case, 90 min) and the nearly identical duration of the gap. Furthermore, the trajectories (cf.,
Figure 5a) revealed that arrival flights were subject to delaying maneuvers by the air traffic control. Aircraft flew holding patterns at each of the four timestamps and were affected by path-stretching on the point merge leg. This suggests that the runway was closed, and the aircraft were delayed for this reason.
Figure 4 shows that there are two gaps that are longer and one gap that is slightly shorter than 15 min between 08:00 a.m. and 09:00 a.m. UTC on 15 July 2020. These gaps are not as consistent and do not have an identical duration like the ones on 20 October 2020. Beyond that,
Figure 5b shows the real flown trajectories of arrival flights on 15 July 2020, and it points out that arrival flights were not subject to delaying maneuvers such as holding patterns or path-stretching. Therefore, we can assume that these gaps occurred due to a period of low traffic demand. As a conclusion of our conducted data analysis, we determined a duration of 20 min for the snow removal action.
Besides snow removal, winter conditions can limit airport operations by additional de-icing of the aircraft. De-icing is necessary because the aircraft surface has to be clean of any contamination, such as ice, slush, or snow, in order to ensure controllability and unimpaired aerodynamic performance [
27]. This is the case when significant snowfall occurs as happened between 01:00 a.m. and 11:00 a.m. UTC on 20 October 2020. According to International Civil Aviation Organization (ICAO) Doc 9640, ice or frost can form on the aircraft surface even at temperatures above the freezing point (e.g., after 11:00 a.m.) [
28]. The effects on each individual flight could not be derived from the provided data. Therefore, it was assumed that a so-called ‘one-step’ de-icing procedure [
28] for all departing aircraft from 01:00 a.m. to 11:00 a.m. was applied. The duration of this one-step de-icing procedure can be determined from the required quantity of de-icing fluid per aircraft type and the fluid application rate of the de-icing vehicle.
Table 2 lists the recommended amounts of de-icing fluid per aircraft type in liters [
29].
An example of a typical de-icing vehicle is the Vestergaard “Elephant BETA-15”. It is capable of de-icing aircraft up to an Airbus A380. The fluid application rate ranges from 20 L/min to 240 L/min [
30]. This results in two duration values, which is why the mean of both values was taken as the standard duration for the fluid application. Because of an information shortage regarding the technical functionality of the de-icing vehicle, we took the mean of the minimum and maximum duration values instead of calculating a duration on the basis of the average fluid application rate.
Table 3 shows the results of this calculation. The duration resulting from using the maximum fluid application rate is labeled as “Min”, whereas the duration resulting from using the minimum fluid application rate is labeled as “Max”.
To include these values in the simulation models, a generalization was made. The aircraft-type-specific durations for fluid application were merged into their respective aircraft size category according to the code letter of the ICAO aerodrome reference code (A to F). If there were discrepancies between the aircraft types of the same code letter, the greater value was used. In addition, the duration for aircraft of code letters A and B had to be assumed because of a lack of data. The aircraft size category-specific durations for fluid application, which were considered in the simulation model, are presented in
Table 4.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}