1. Introduction
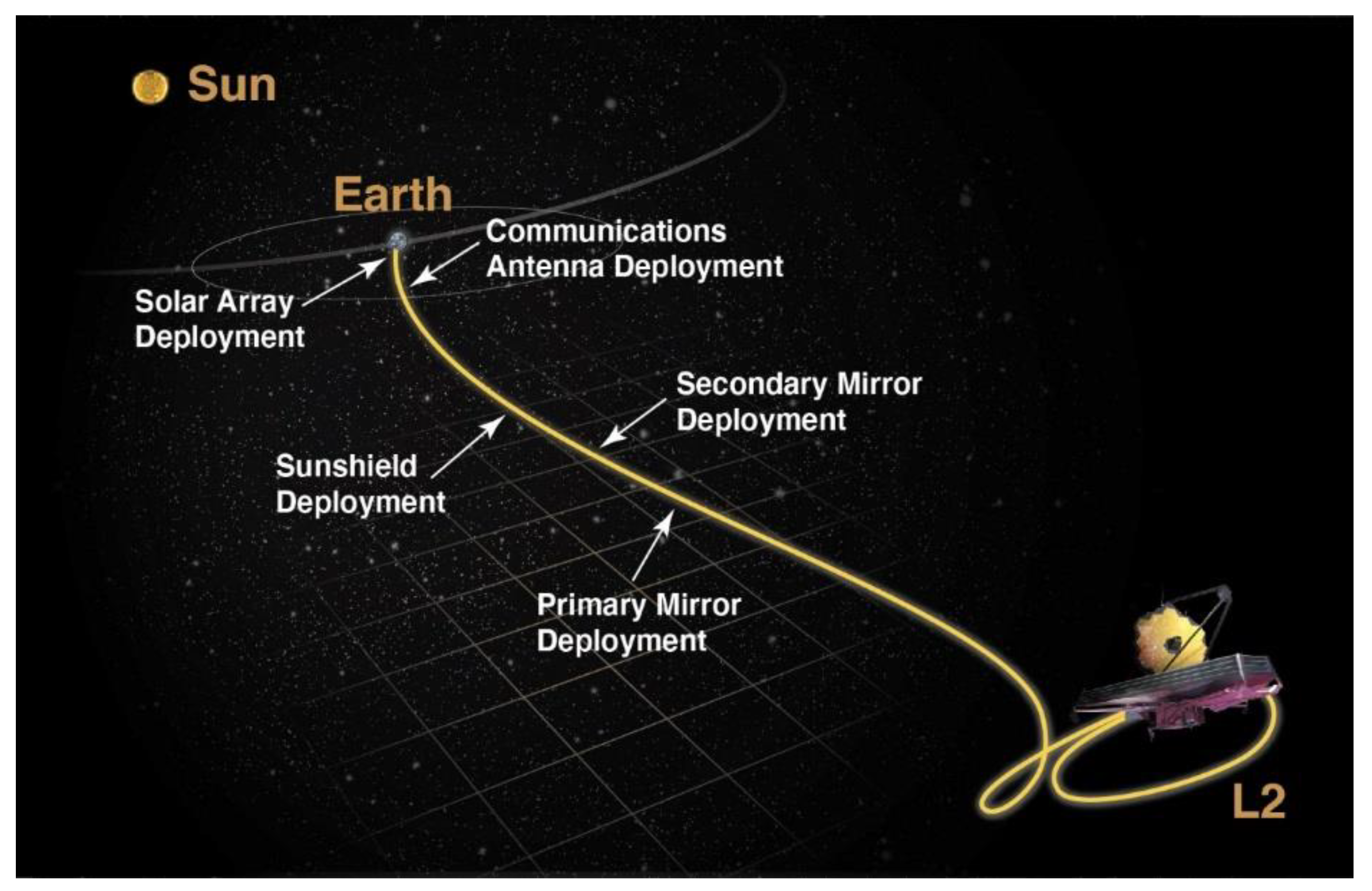
The James Webb telescope depicted in
Figure 1 is an example of the paramountcy of attitude trajectories of angular momentum to space mission accomplishment. The James Webb Space telescope (JWST) will study the formation of stars, galaxies, and planets 100–250 million years after the Big Bang. To see the first stars and galaxies of the early universe, JWST must look deep into space, necessitating a need for fine pointing accuracy, one of the reasons JWST is positioned so far away from Earth and the perturbations of the atmosphere. Due to the incredible distance between the JWST and potential imaging targets, pointing errors of mere arcseconds can lead to the telescope field of view not including the intended target, and any spacecraft jitter results in blurry, unusable images. Additionally, the control cost of pointing maneuvers must be considered carefully. Lower control costs result in “cheaper” maneuvers, which can allow for less expensive spacecraft launch, due to mass savings, more possible maneuvers over the spacecraft lifetime due to energy savings, or simply greater error tolerances and recovery capabilities.
The same holds true for near Earth observational satellites. While satellites such as Landsat-9 [
3] image targets much closer than JWST does, the increase in magnification power and resolution of such satellites warrants the same need for fine pointing accuracy. Understanding and application of trajectory generation and solution optimality leads to even lower control cost and greater pointing accuracy than has been possible. As pointing accuracy needs increase, attitude trajectories and the provided decrease in pointing error and control cost are vital in making future missions possible.
This manuscript describes two methods of formulating spacecraft attitude slew trajectories and compares various control architectures in performing the generated maneuvers. Rather than the classical formulation of feedback control of a single desired value subtracted from the current state, attention has shifted to more intelligent schemes where the slew trajectory is mapped out for the entire maneuver. Not only does a solved maneuver trajectory allow for more control, customization, and confidence in a control architecture, but also pointing conditions and restraints can be imposed and validated. For example, for a spacecraft to keep a sun-sensor pointed at the sun as best as possible throughout a maneuver. The entire trajectory can be simulated, visualized, and checked ahead of time with a much lower degree of randomness than classical control methods based on final conditions rather than trajectories, might allow. Using trajectories also introduces possibilities for finding optimal solutions, in fuel use, time or distance. One such manner of generating optimal trajectories is by use of Pontryagin’s method. In this manuscript, Pontryagin’s principle of using necessary conditions of optimality to solve for optimal trajectories in terms of control cost will be examined and contrasted with simpler trajectory generation techniques. Additionally, progress has been generated in the development of deterministic artificial intelligence, a control scheme based on a statement of self-awareness, and optimal parameter learning, to determine the optimal control to follow a desired trajectory [
4,
5,
6]. Naturally, the question arises of the effects of applying optimal trajectory optimization methods to such adaptive feedforward methods of optimal control, as well as other control architectures. This manuscript will derive trajectories to perform a given slew maneuver of 30 degrees yaw, as well as present the formalism behind adaptive control techniques and deterministic artificial intelligence.
Section 2 describes the materials and methods used to reveal the results presented in
Section 3.
Section 4 provides a brief discussion on the results in
Section 3.
Attitude trajectory adaptation was developed and proposed in [
4], but the parameterization suffered from expression in inertial coordinates leading to a high computational burden (thus evaluation of techniques on this basis will remain important). Within just a couple of years, development of the identical technique parameterized in the body frame [
5] proved to eliminate a large part of the computational burden. Several years later the burden was reduced still further [
6] by 33% and 66% parameter reduction with subsequent experimental validation in [
7]. Adaptability is often desirable, but results are sometimes difficult to prove as optimal, minimizing some prescribed cost function. Position and attitude constraints have been simultaneously considered [
8] and inherent disturbance rejection as well. Limited control actuation has also been treated [
9,
10], while optimization has been presented when control moment gyroscopes are used [
11], as gyroscope singularity is enormously concerning. Guidance trajectories were derived using only attitude trajectories [
12] near small bodies. In 2018, trajectories began to be presented [
13] to support the newly proposed deterministic artificial intelligence [
14], while at the same time, constrained optimization problems of attitude trajectories were proposed in [
15]. Following the former deterministic thread of thinking, deterministic optimal assertion of self-awareness and optimal learning were formulated in [
16]. With a renewed focus on attitude trajectory optimization [
17], disturbance minimizing trajectories for space robots was just proposed [
18]. Finally, convex optimization for trajectory generation [
19] was presented amidst a focus on rapid maneuvering agile satellites in constellations [
20]. Garcia, et al. [
8] highlighted the complicated complexity of optimization of space trajectories generated by the nonlinear, coupled governing equations of motion. Sanyal, et al. [
21] emphasized the desirability of analytic, continuous trajectory equations over discontinuous ones from the perspective of proof-of-stability. Walker [
15,
22] utilized genetic-algorithm-tuned fuzzy controller solutions compared to a similar linear quadratic regulator solution (as opposed to nonlinear solutions presented here).
Chen, et al., [
17] illustrated that attitude trajectory optimization can simplify control system design and improve relative performance. In this most recent resurgent strand of research, this manuscript examines convex trajectory optimization using Pontryagin’s methods for control minimization [
23] and compares several instantiations to comparable variants utilizing the sinusoidal trajectory generation ubiquitously presented in avenues of research in deterministic artificial intelligence expanded in this present treatment.
This work proposes to:
Present and derive two methods of autonomous slew trajectory generation, sinusoidal and Pontryagin based generation.
Compare the performance of the derived trajectories when combined with various feedforward and feedback control schemes.
Present two iterations on Pontryagin based trajectory generation and compare the instantiations.
Validate the strength of trajectory-based control schemes over single-state feedback control methods.
The manuscript begins in
Section 2 with a re-introduction of sinusoidal trajectory generation before deriving control minimizing (analytic) optimal trajectories using Pontryagin’s method of imposing necessary conditions of optimality followed by solution of boundary value problems for families of solutions. A brief presentation of each of the control methods follows.
Section 3 presents the results of simulations of the control methods and lastly
Section 4 discusses and interprets the results of
Section 3.
4. Discussion
Looking at
Table 1 and
Table 2, note the addition of feedforward decreases the control effort by 0.8% on average. Additionally, the three feedforward techniques seem to perform equally well. Comparing
Table 2 with
Table 1, Pontryagin trajectory generation lowers control cost by about 1–1.5%.
Looking at
Table 3 and
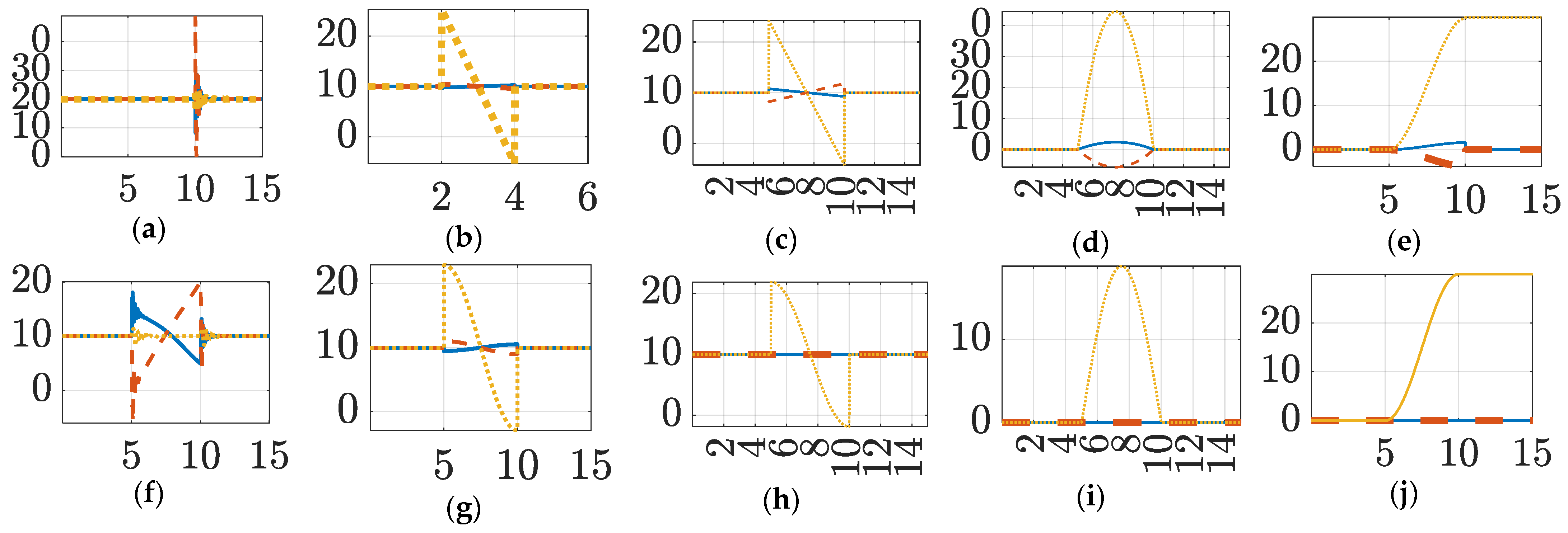
Table 4, Pontryagin techniques with feedback incur a lot of control cost. Examining the control torques and trajectories in
Figure 5, reveals the Pontryagin method of converting from the principal frame to the body, commands motion in all three axes (see
Figure 5e) due to the cross-coupling. Comparing
Figure 5e with
Figure 5f,d reveals the sinusoidal does not command motion in all three axes.
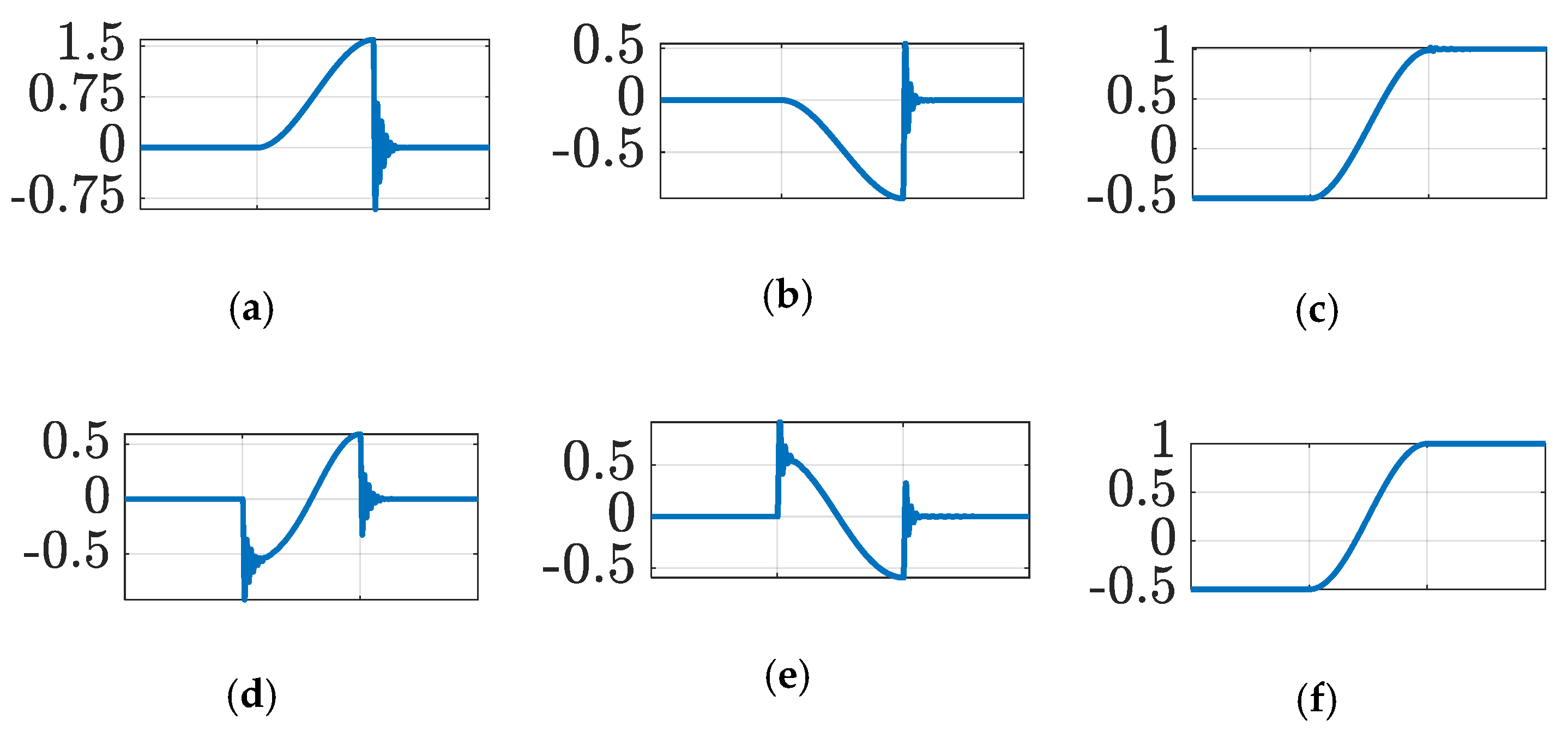
Looking at the tracking of the Euler angles in
Figure 6, there is significant change in the non-slew directions. Once the slew is over, the error in commanding undesirable motion in the non-slew directions manifests itself in a spike of feedback control, making the control cost abnormally high. When Pontryagin is used without converting back into the body frame from the principal, essentially deriving a trajectory in the non-principal frame, undesirable motion in the non-slew directions was eliminated. In the formulation used in
Figure 6 and by virtue of non-zero cross-products of inertia, principal axes were mis-aligned with the body axes, and while a seemingly fine idea, solving for the trajectory in the principal frame and then converting to the body frame introduces error. The misalignment causes undesired rotation in the body frame when the trajectory is converted, via cross-coupled terms in the inertia dyadic.
Table 5 proves not converting between principal and body frames fixes the error.
Table 5 also demonstrates the flexibility of the control architecture, with low error independent of which axis was being rotated around. The disparity between principal moments of inertia and moments of inertia in the body frame, 81.5970, 105.326, 253.0783, compared with 90, 100, 250, is worth noting. Using the moments of inertia in the body frame to solve for the optimal trajectory in Pontryagin’s method applied in the non-principal frame, was predicted to have a detrimental effect, as the control might not be scaled properly. However,
Table 6 shows no difference between using principal or non-principal moments of inertia.
Figure 4 shows the stark contrast between using a calculated trajectory and not. Comparing
Figure 4b to the PD control in
Table 5, note similar final errors in roll pitch and yaw channels, and five orders of magnitude worse control cost. In
Table 7, the PD controller gains were raised revealing that use of a calculated trajectory results in better final state error as compared to control without a calculated trajectory. Additionally, in response to elevated gains, control cost rose by a factor of ten in the non-trajectory case (between
Figure 4b and the second row of
Table 7), however when using Pontryagin optimal trajectory, the control cost actually decreased in response to elevated gains, by 11.7% (comparing the third row of
Table 5 and the first row of
Table 7) while the error decreased by an order of magnitude in the roll and pitch channels, and seven orders of magnitude in the yaw channel. The use of a calculated trajectory is thus shown to allow for higher gains that result in significantly lower error, and lower control cost. Additionally, the plotted system response with no calculated trajectory in
Figure 4a, shows significant overshoot and significant oscillatory motion as compared to using a calculated trajectory.
As for a computational burden analysis, run time was recorded in each of the trials. Unfortunately, run-time was found to be dependent on the hardware the simulation was run on and how much of the CPU was available, resulting in an inability to compare run time across different tables. However, looking at each table individually, no run time different of more than 20% was observed, and no observable patterns found. With more detailed analysis it could be concluded whether any of the control methods used were more computationally demanding than the others, however for the purpose of this study, all control methods were deemed relatively similar in terms of computational burden.
4.1. Conclusions
Trajectory generation demonstrates significant decrease in control cost and attitude error as well as allowing for more versatile gain tuning. Pontryagin’s method shows promise, lowering control cost slightly over Sinusoidal generation and lays the groundwork for more sophisticated autonomous trajectory generation, by modification of the Hamiltonian (Equations (9) and (10)), such as imposition of pointing restraints, not possible with the sinusoidal method. Proper understanding of cross-coupling dynamical effects proved crucial in the formulation of Pontryagin’s method, however proving simple to deal with. Lower pointing errors make missions focused on objects further away, or requiring higher magnification and object resolution, possible, and lower control costs improve the efficiency of such missions, increasing viability.
4.2. Future Work
RTOC was not implemented and studied. RTOC inherently uses the trajectory solved for in Pontryagin’s method and a comparison of RTOC to control using sinusoidal trajectory generation would be interesting. Additionally, the assumption to solve for each Euler angle trajectory separately using Pontryagin’s method, inherently introduces some error. The amount of error in this formulation should be examined. A better approach would be to solve Pontryagin’s method for the full coupled dynamics. While there do exist methods to do so, they lie outside of the scope of this work were not attempted.
Of note, results are possible with higher gains and modest increases in cost. However, the investigation of this work was not into achieving the lowest error possible.
The true power of Pontryagin’s method lies in the ability to parameterize desired trajectories and solve for optimal solutions. For instance, during a slew a requirement might be specified declaring the spacecraft shall never point in a certain direction. With sinusoidal trajectory generation, there is no way to enforce a requirement on pointing restrictions without analysis of the sinusoidal trajectory and careful design of piecewise maneuvers around restrictions. However, Pontryagin’s method allows for such specifications in the formation of the Hamiltonian. Pontryagin’s method could significantly reduce control efforts of more complicated maneuvers with pointing restriction.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













