
Flight Procedure Analysis for a Combined Environmental Impact Reduction: An Optimal Trade-Off Strategy


Abstract
:1. Introduction
2. Materials and Methods
2.1. Aircraft Model
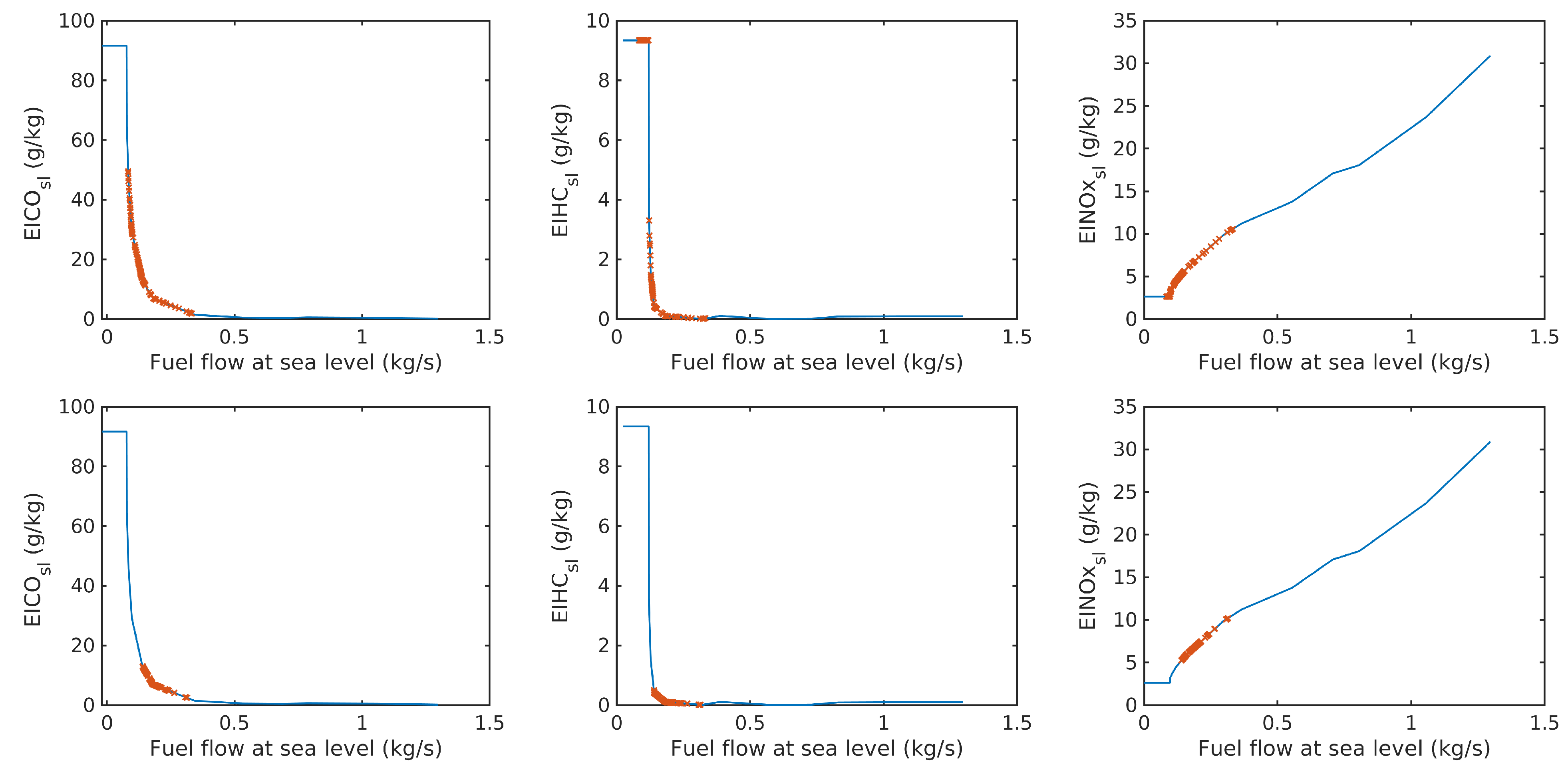
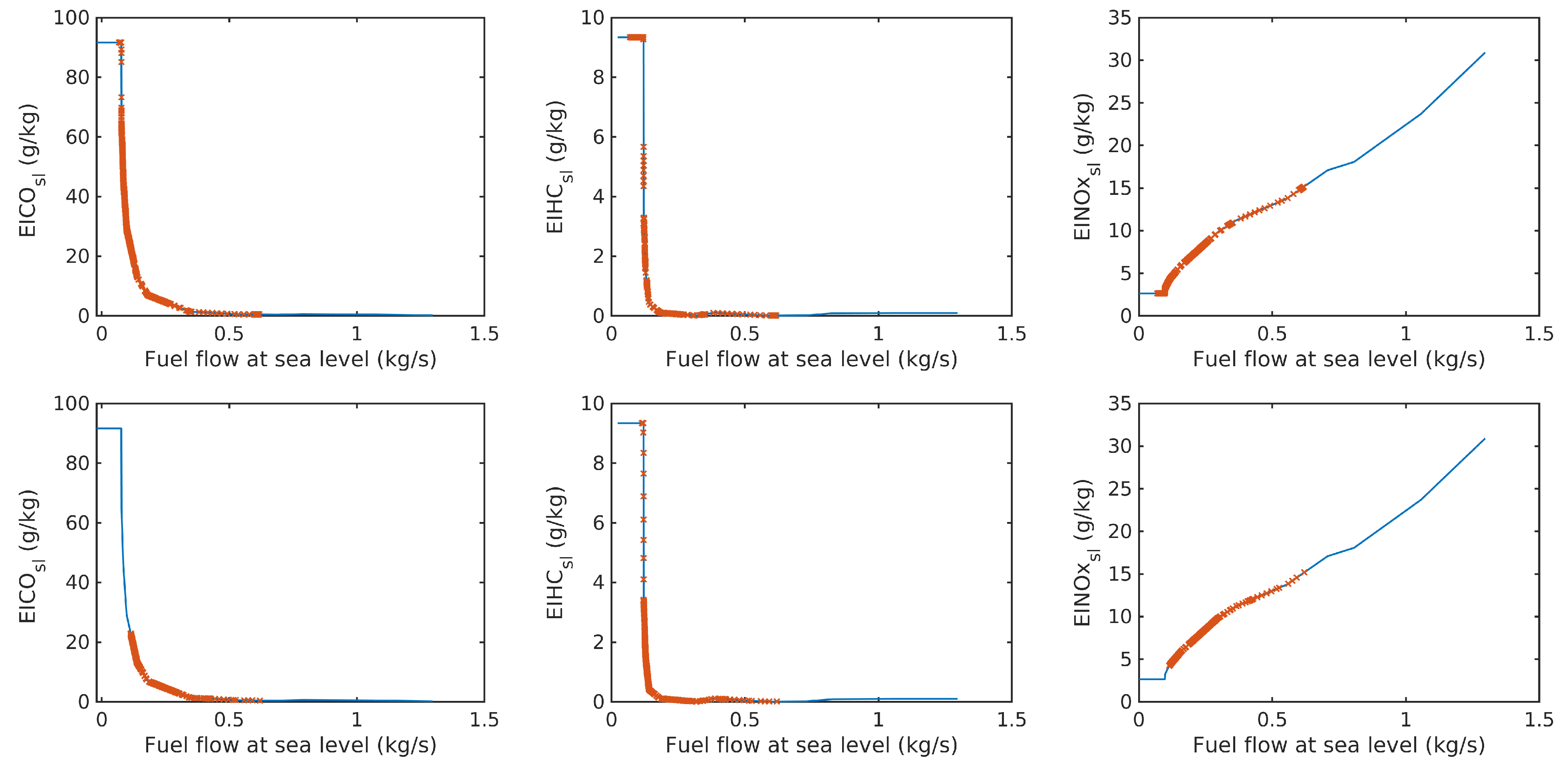
2.2. Emissions Model
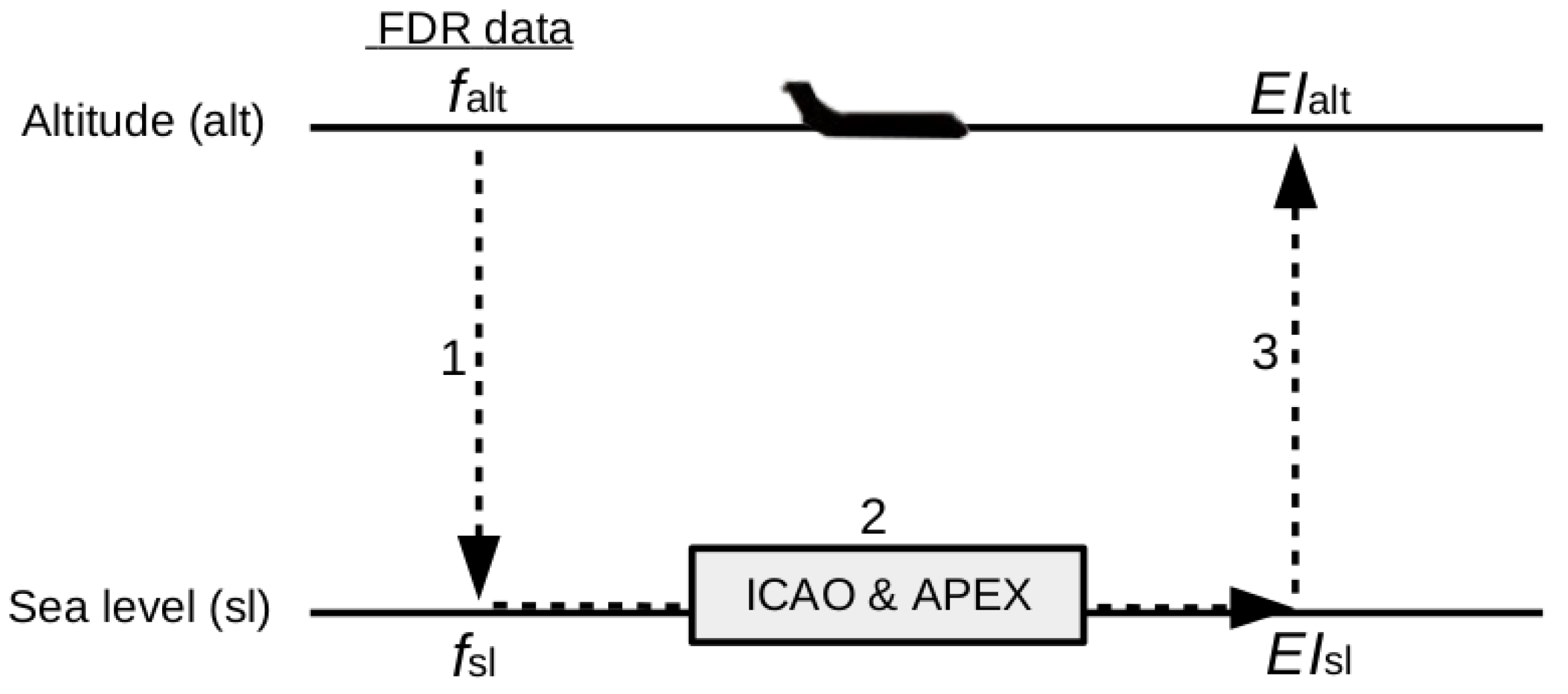
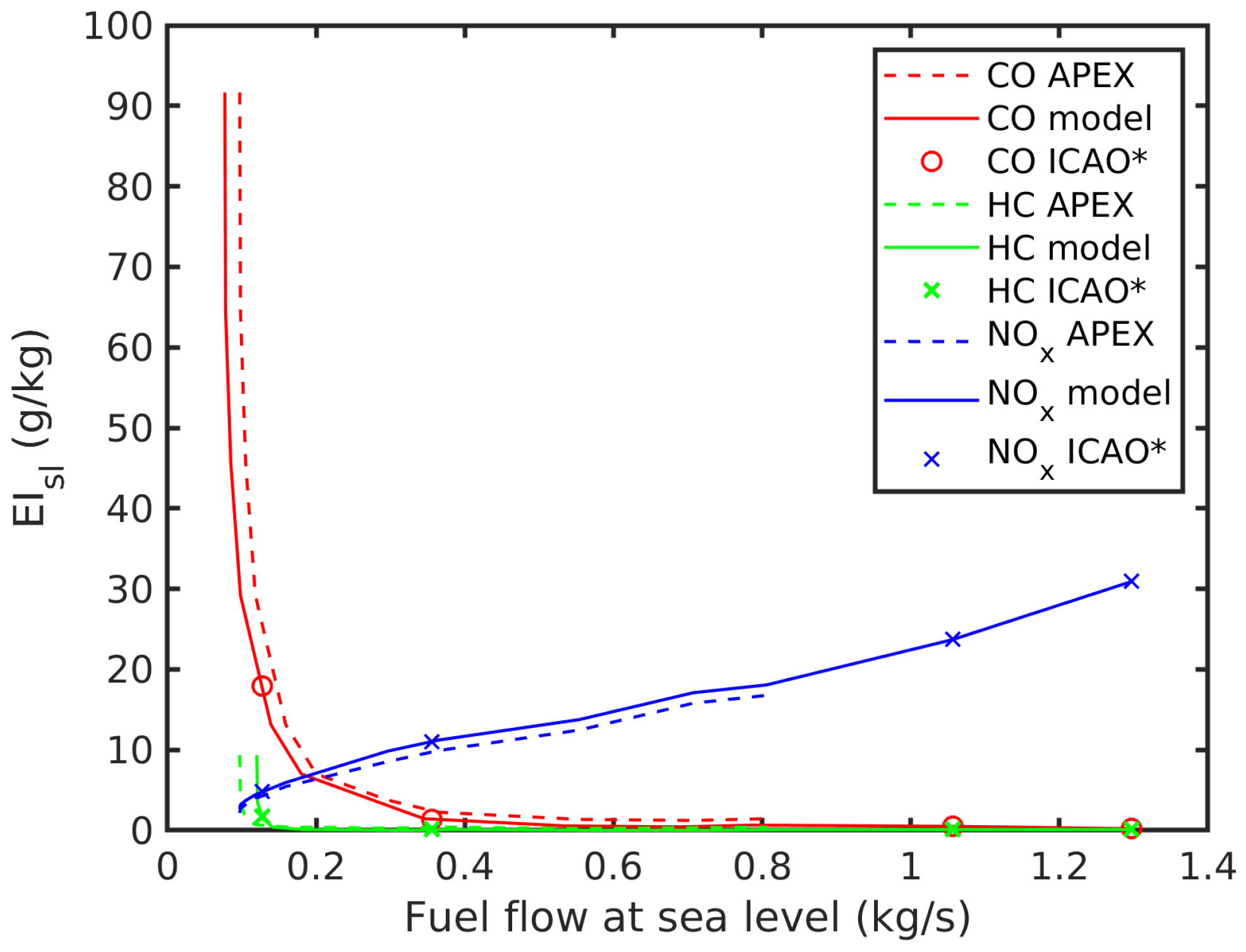
2.2.1. Method for Emission Index Modeling
2.3. Noise Model
2.4. Aircraft Trajectory
2.4.1. Trajectory Simulation
Validation
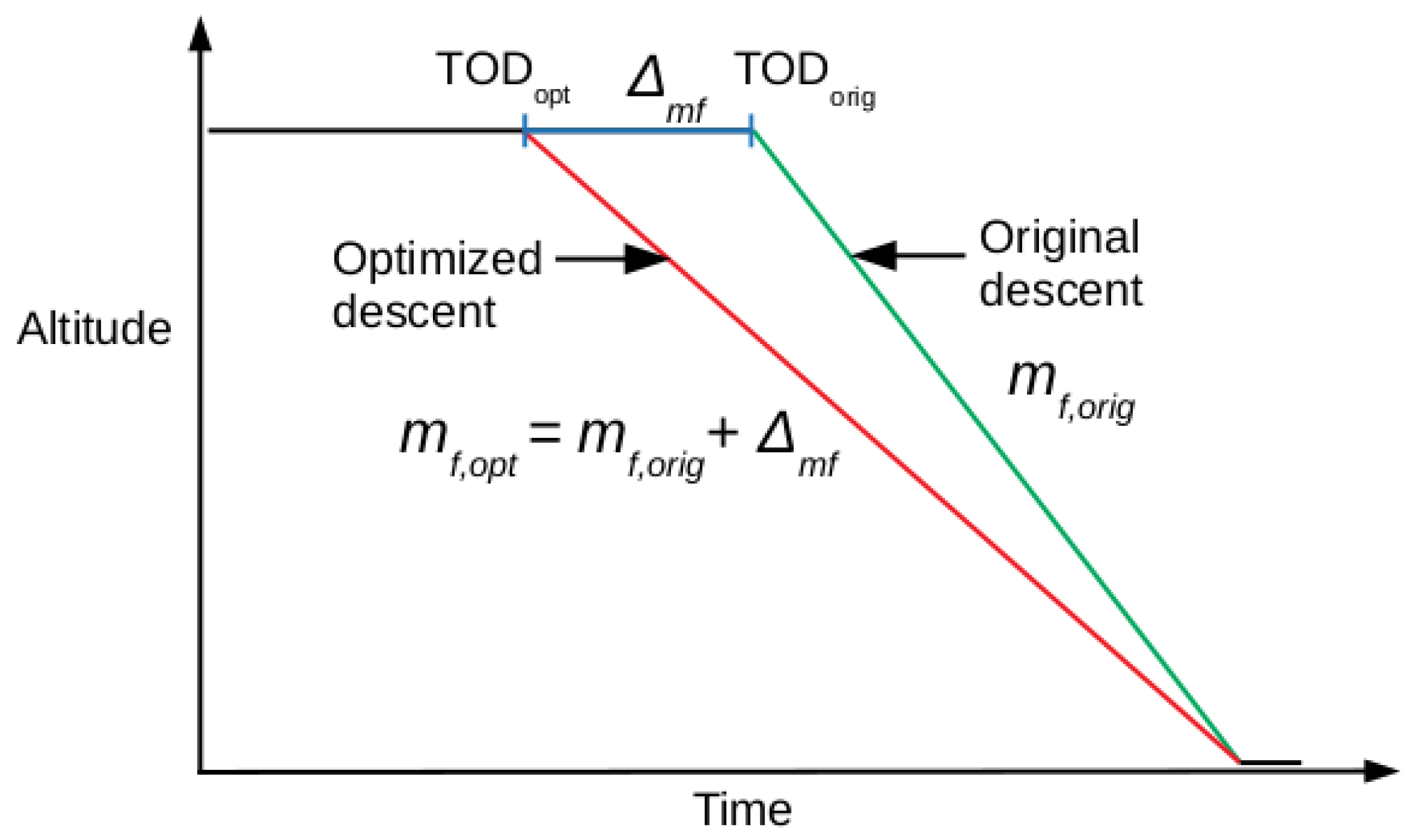
2.4.2. Flight Procedure Optimization Method
3. Results
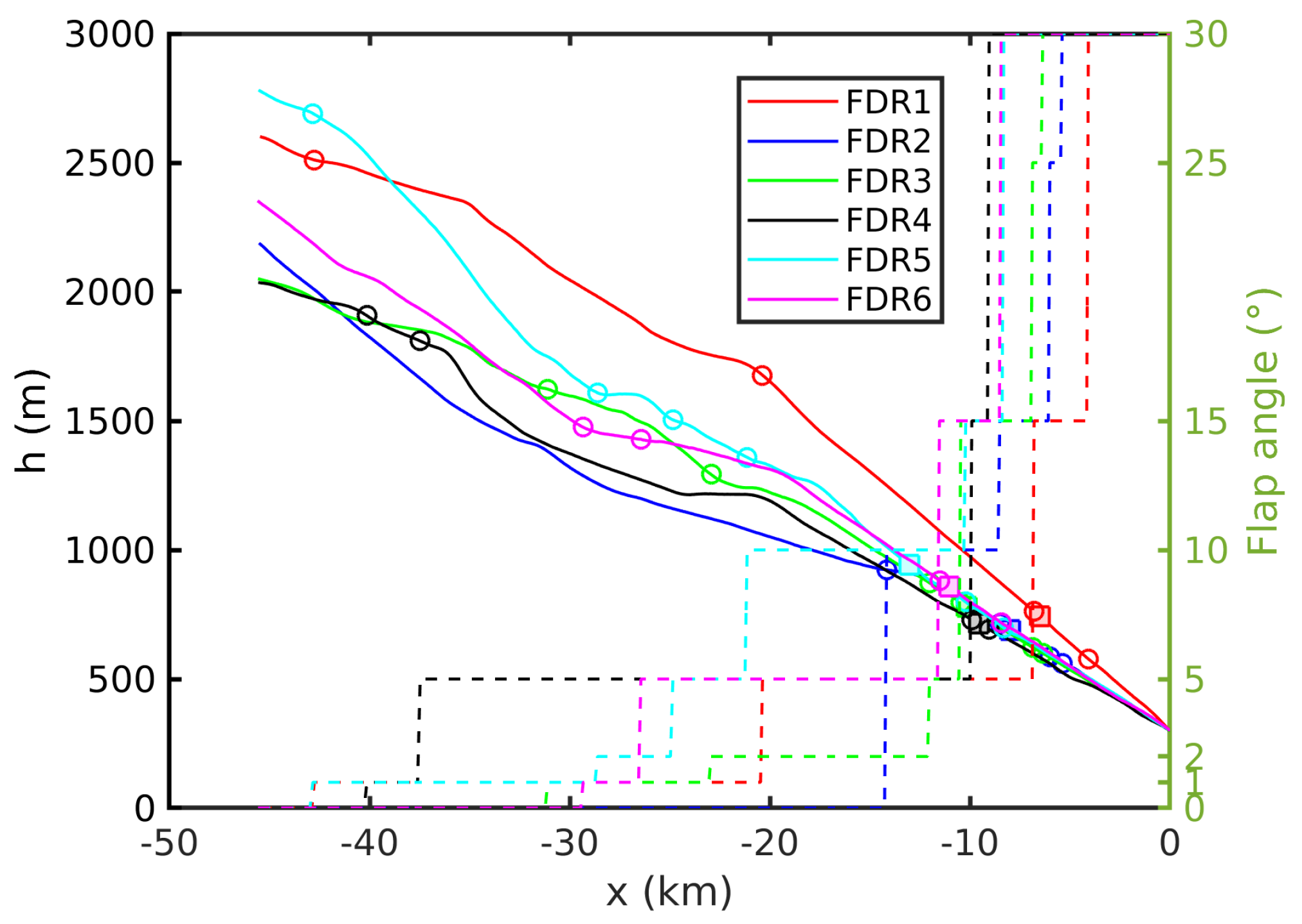
3.1. Flight Trajectories
3.2. Emissions Analysis
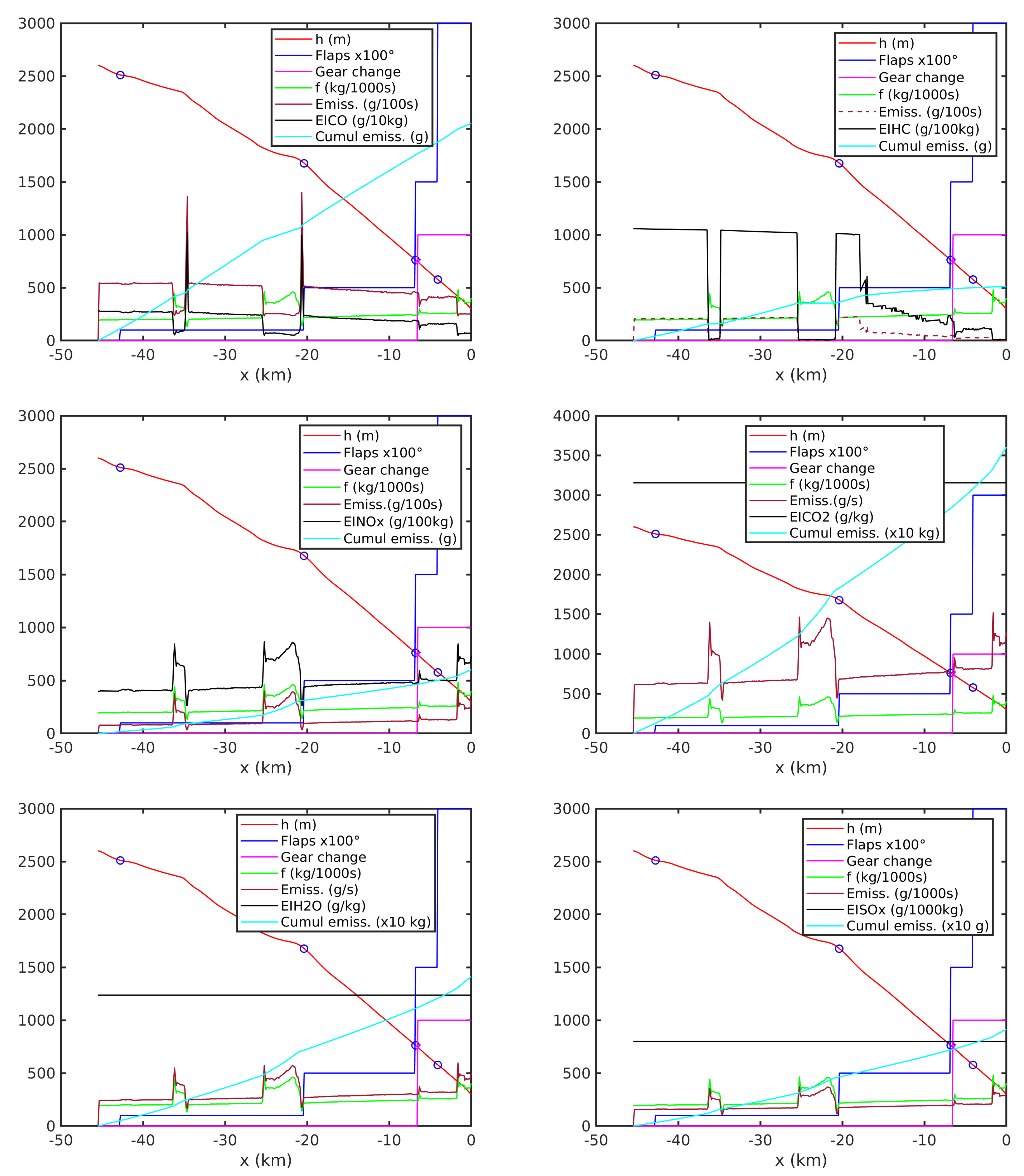
3.2.1. Single Trajectory
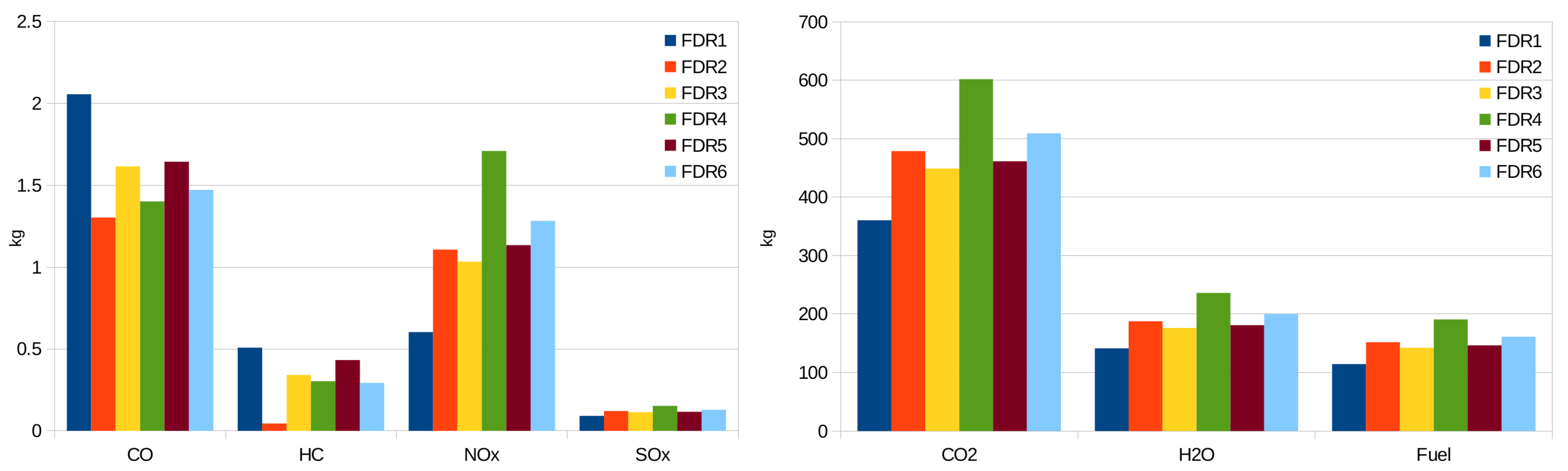
3.2.2. Trajectory Comparison
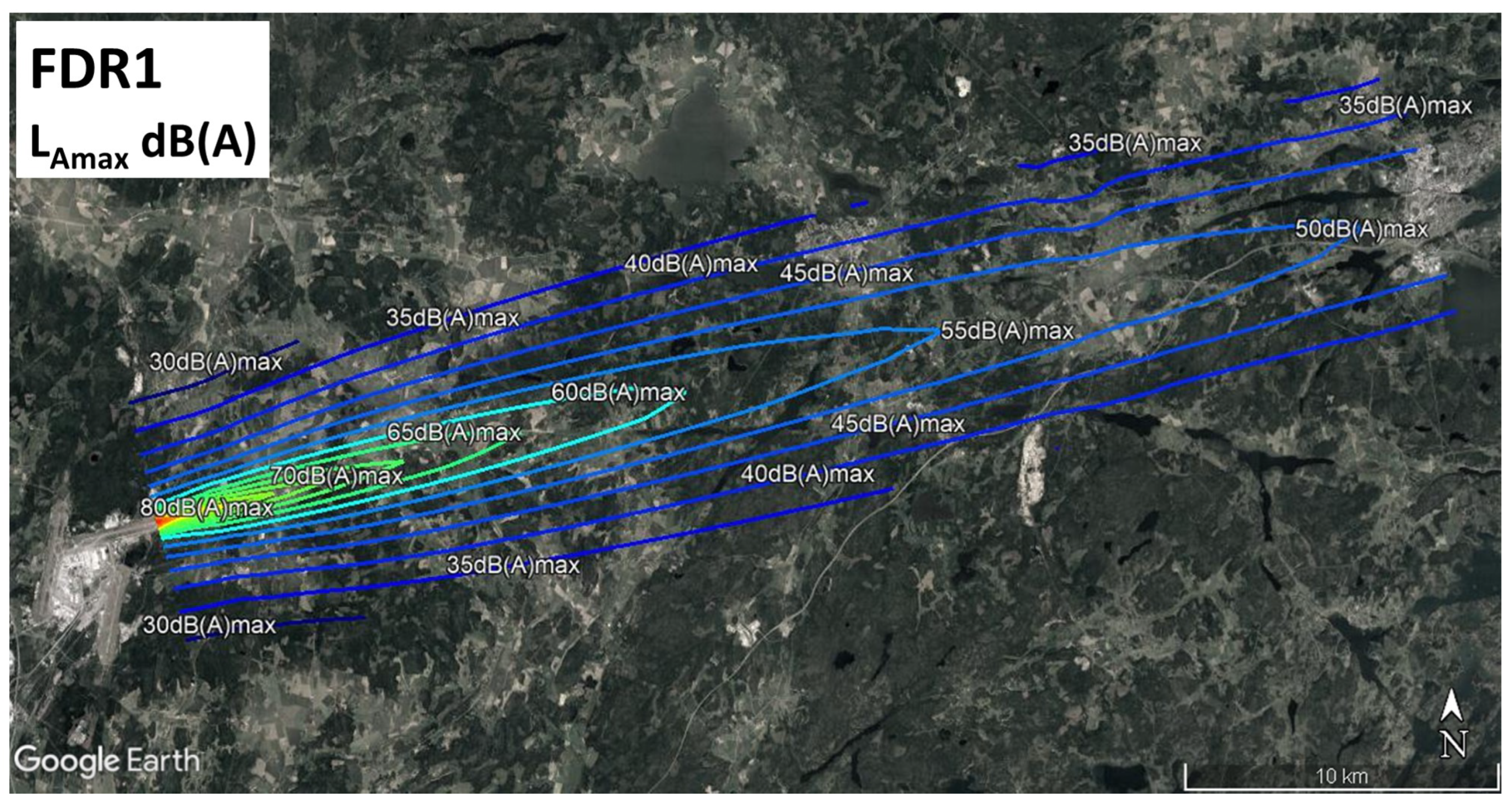
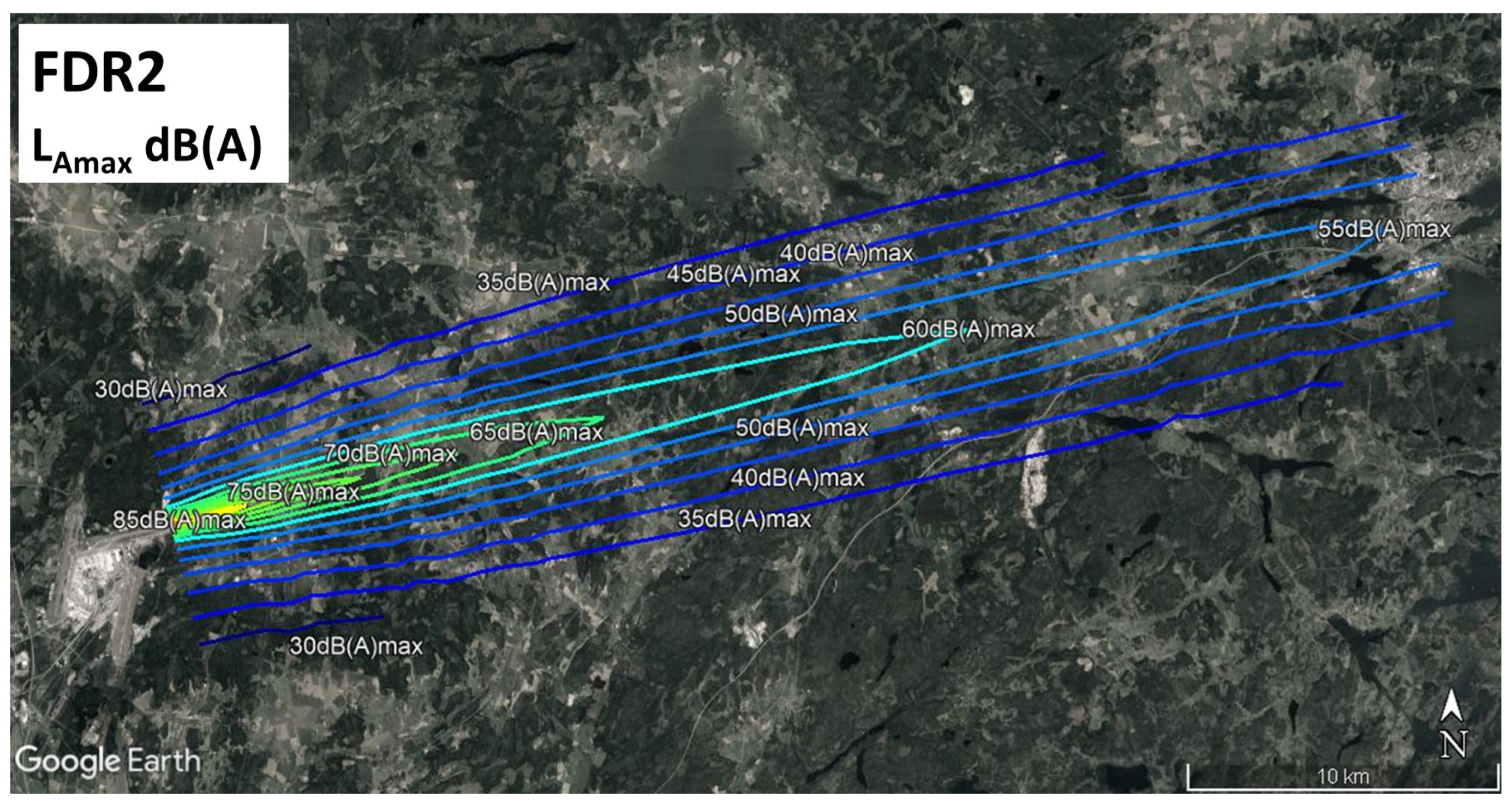
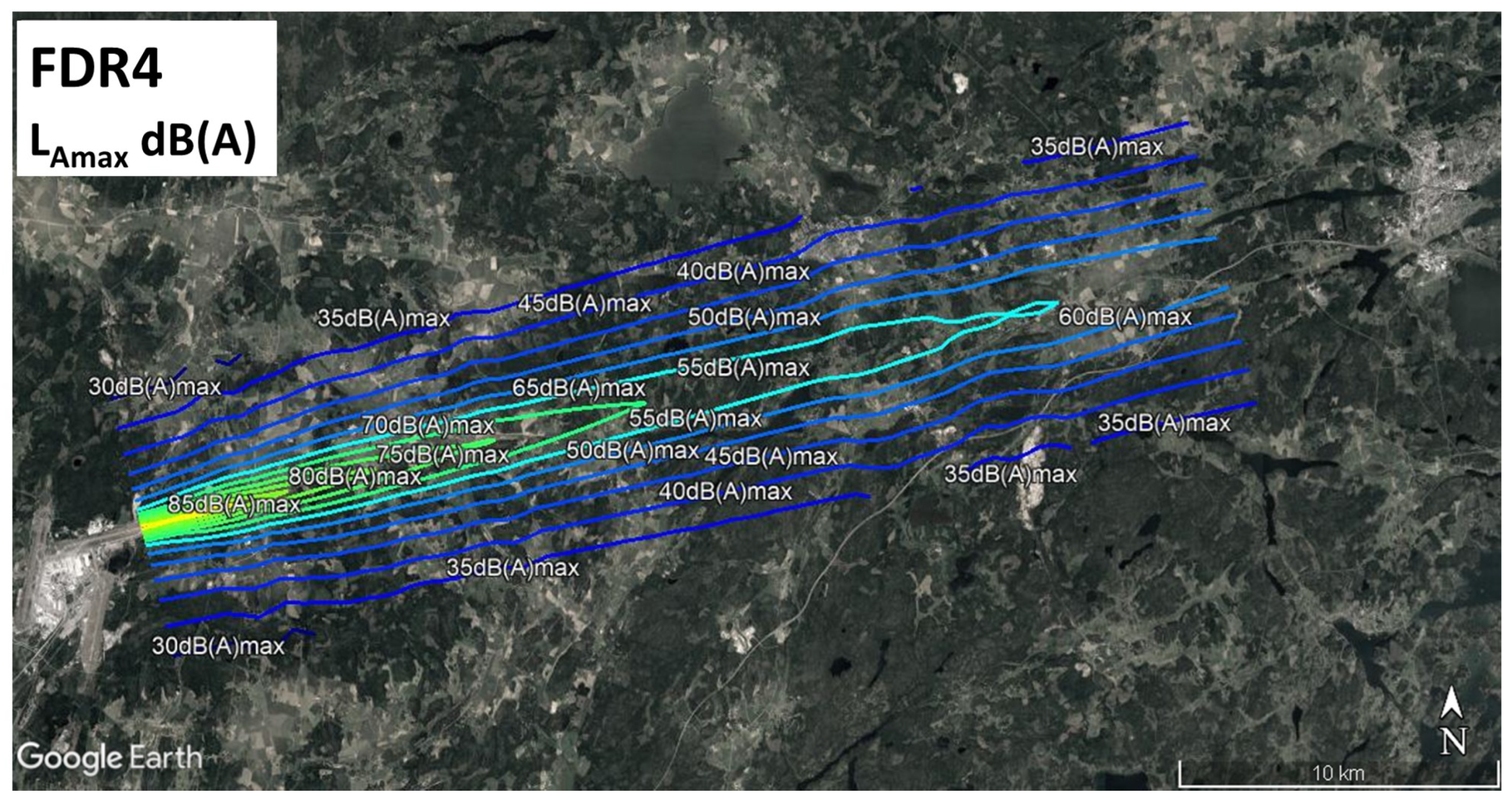
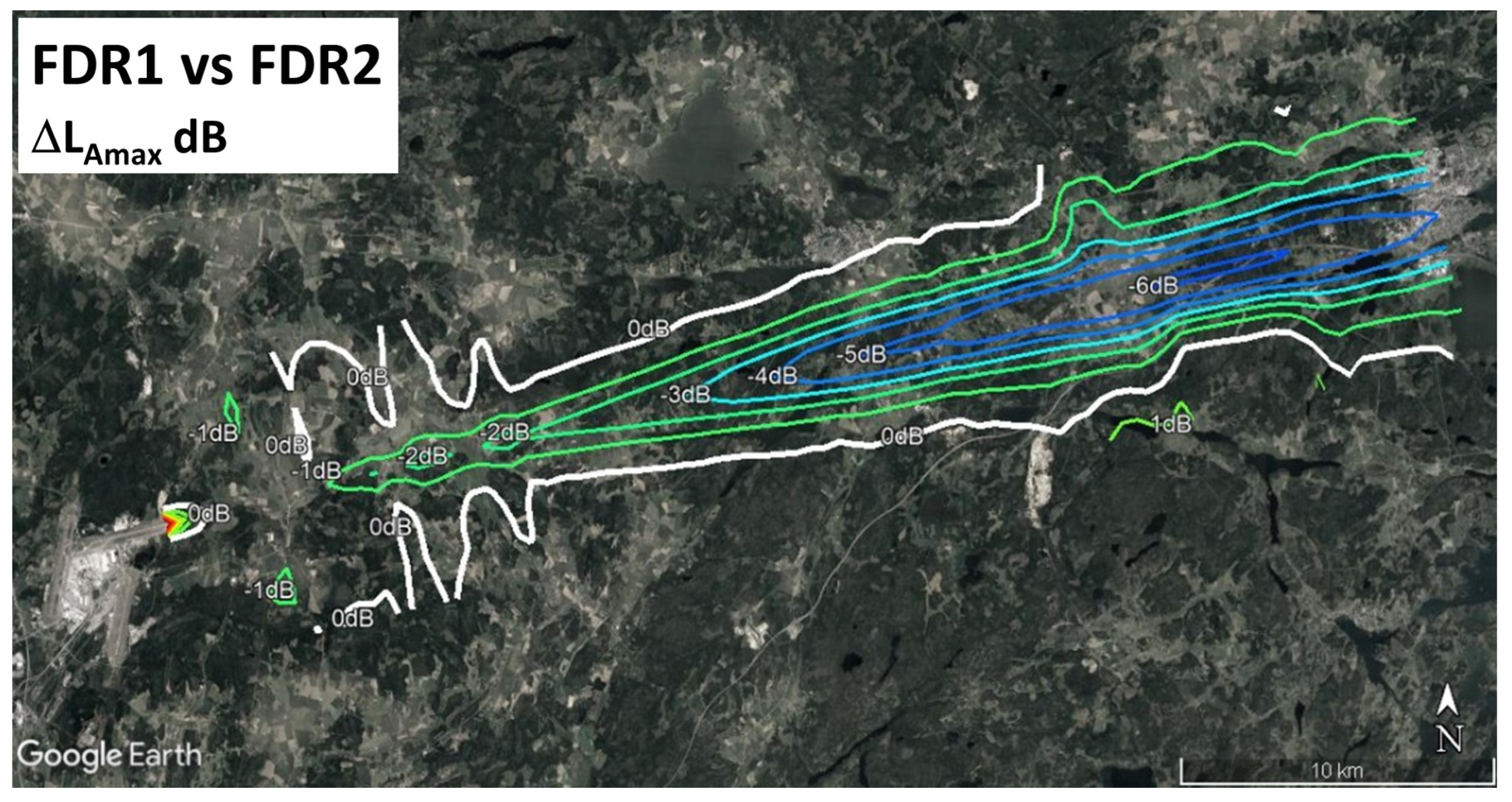
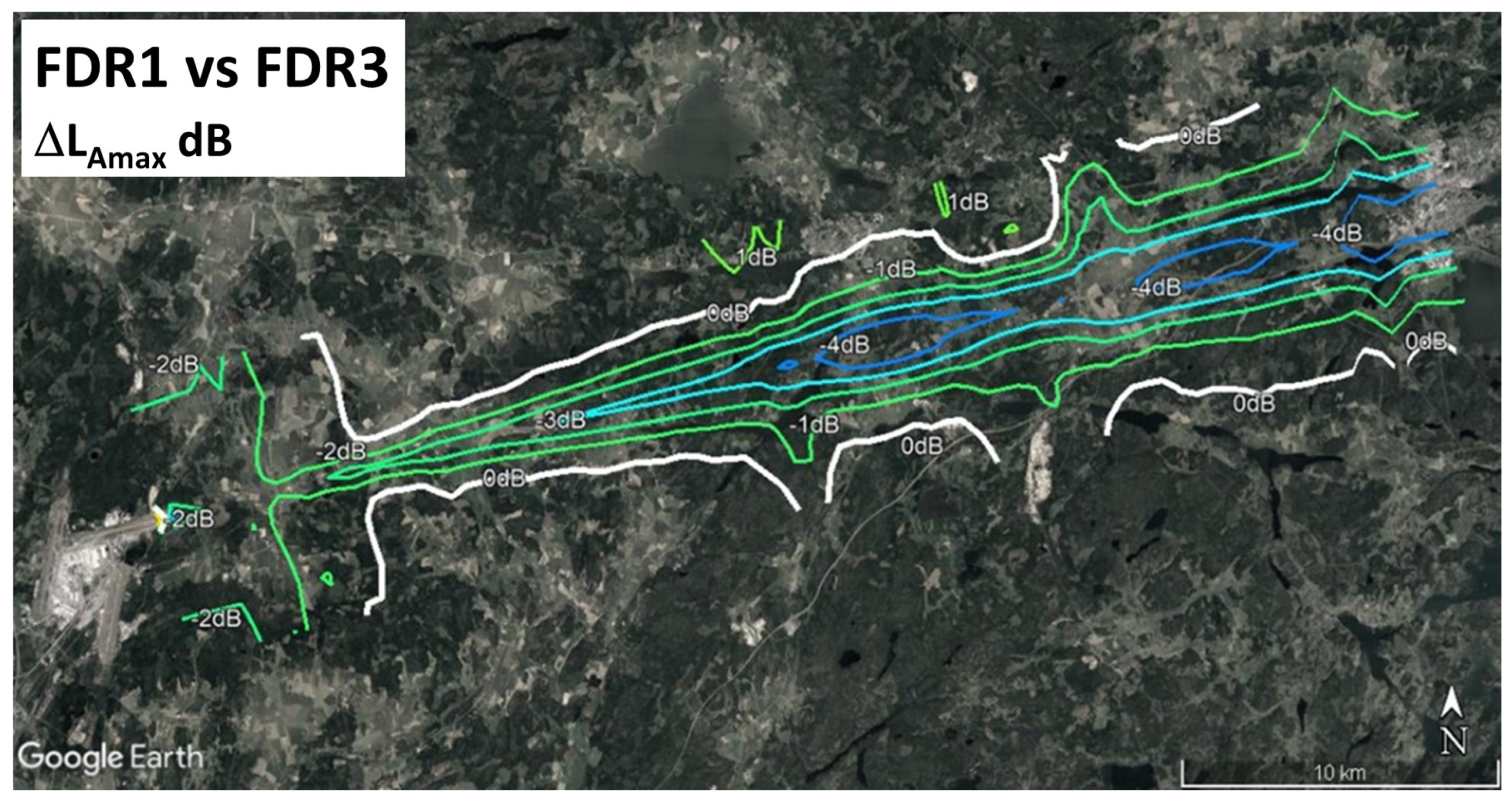
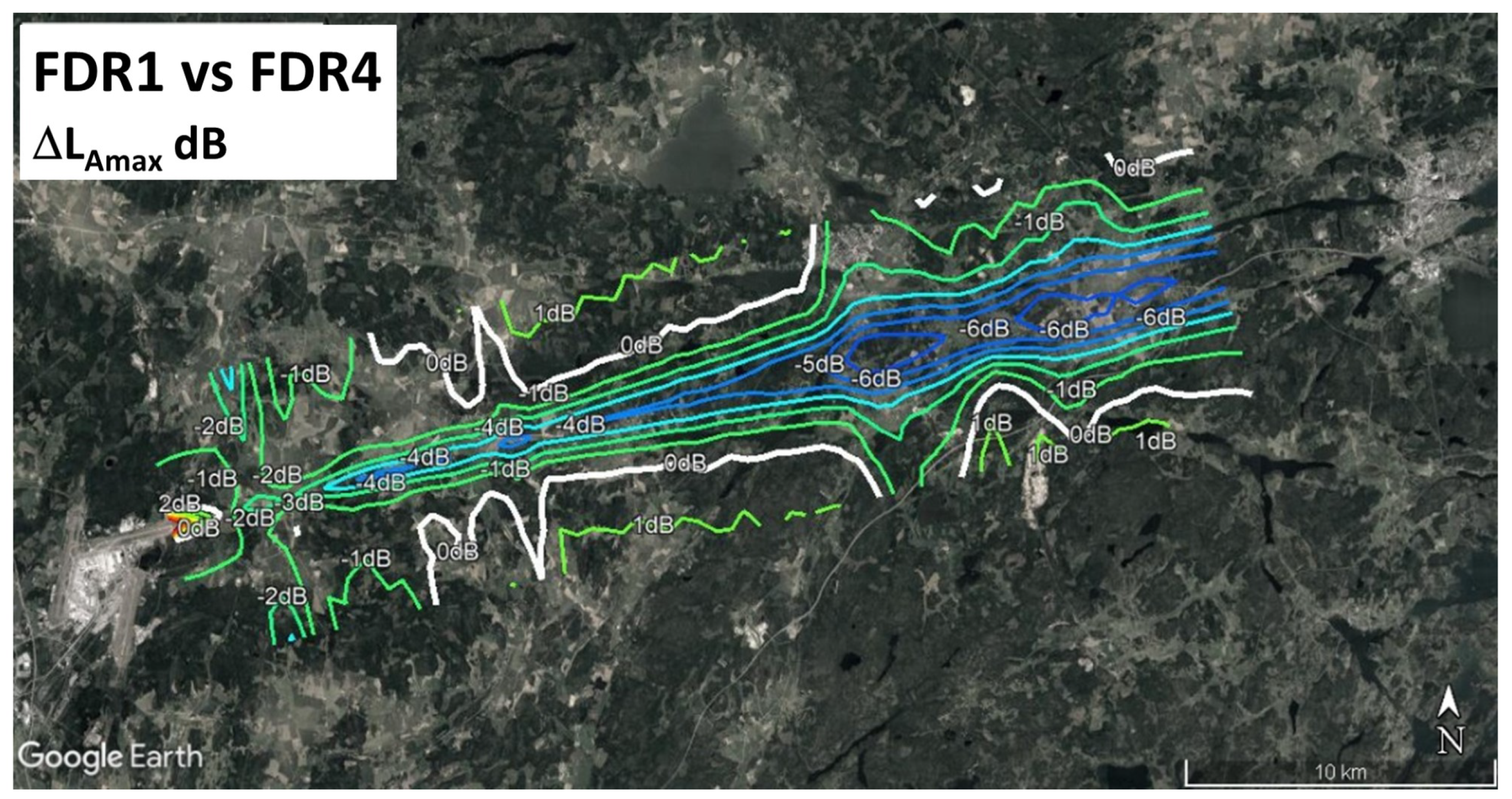
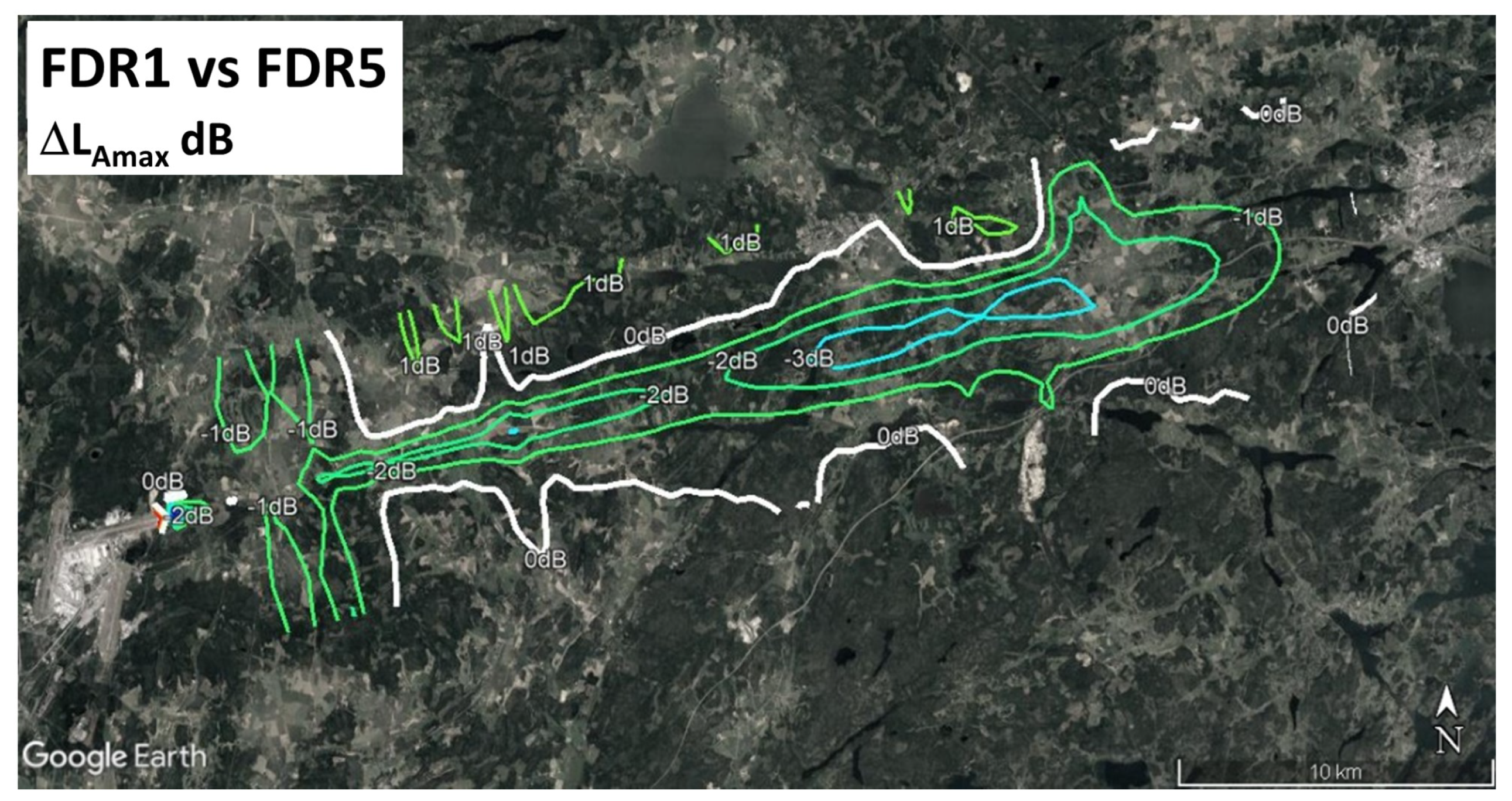
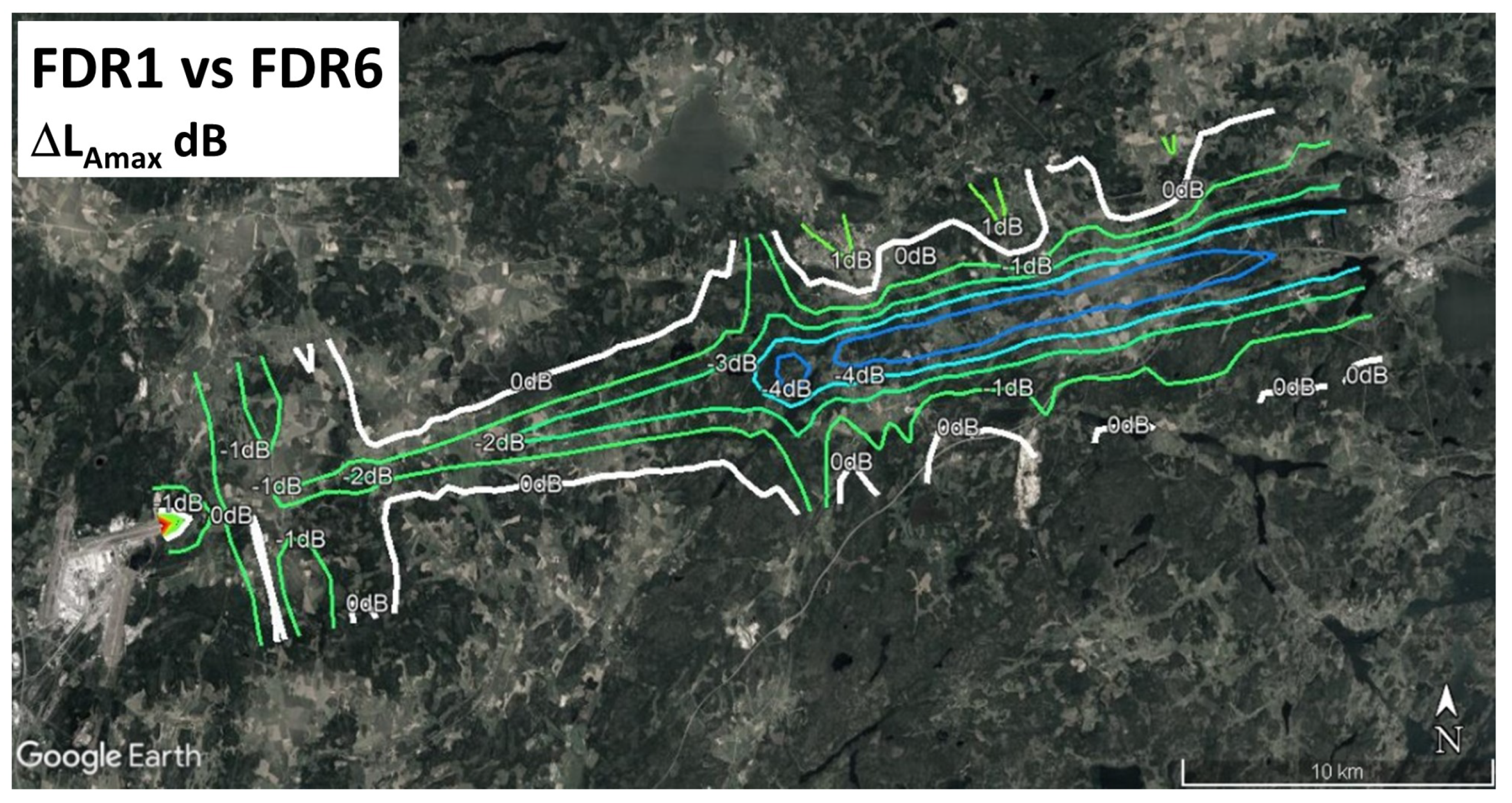
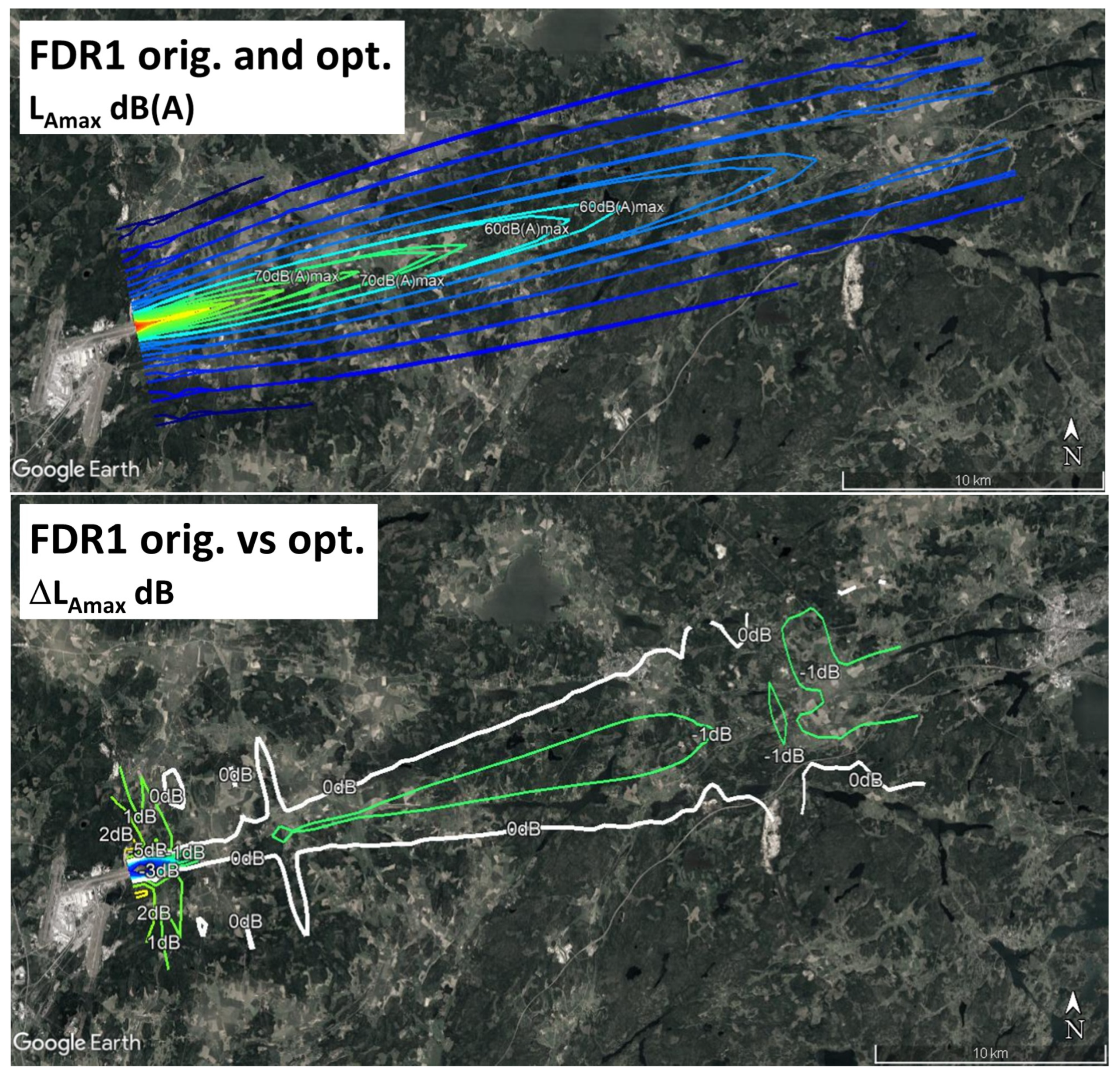
3.3. Noise Analysis and Interdependencies with Emissions
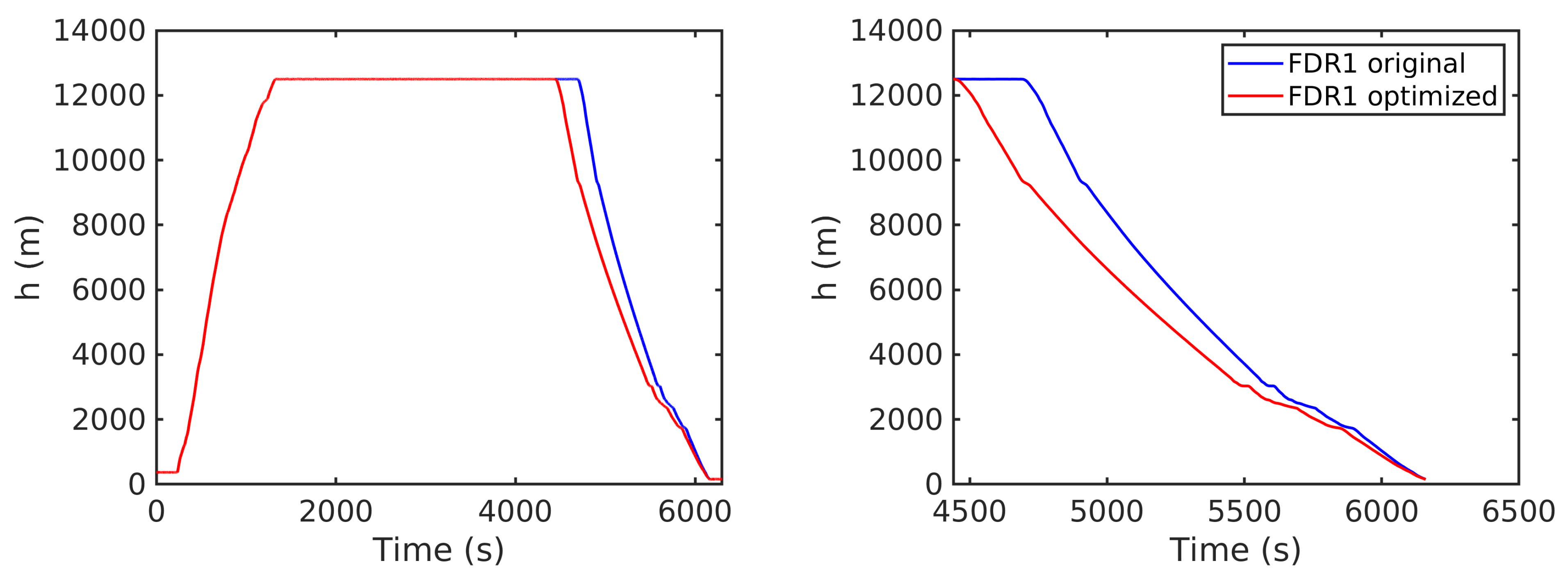
3.4. Flight Procedure Optimization
3.4.1. CO and HC Minimization
3.4.2. Environmentally Optimal Trajectory
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zellmann, C.; Schaffer, B.; Wunderli, J.M.; Isermann, U.; Paschereit, C. Aircraft Noise Emission Model Accounting for Aircraft Flight Parameters. J. Aircr. 2017, 55, C034275. [Google Scholar] [CrossRef]
- Meister, J.; Schalcher, S.; Wunderli, J.-M.; Jager, D.; Zellmann, C.; Schaffer, B. Comparison of the Aircraft Noise Calculation Programs sonAIR, FLULA2 and AEDT with Noise Measurements of Single Flights. Aerospace 2021, 8, 388. [Google Scholar] [CrossRef]
- Tengzelius, U.; Johansson, A.; Åbom, M.; Bolin, K. Next Generation Aircraft Noise-Mapping. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, InterNoise21, Washington, DC, USA, 1–5 August 2021; pp. 1945–2948. [Google Scholar]
- European Commission. Reducing Emissions from Aviation. 2020. Available online: https://ec.europa.eu/clima/policies/transport/aviation_en (accessed on 1 July 2020).
- EASA. Emissions. 2020. Available online: https://www.easa.europa.eu/eaer/topics/overview-aviation-sector/emissions (accessed on 1 July 2020).
- Jardine, C.N. Calculating the Environmental Impact of Aviation Emissions; Oxford University Centre for the Environment: Oxford, UK, 2005. [Google Scholar]
- Lee, D.S.; Fahey, D.W.; Skowron, A.; Allen, M.R.; Burkhardt, U.; Chen, Q.; Doherty, S.J.; Freeman, S.; Forster, P.M.; Fuglestvedt, J.; et al. A Gettelman The Contribution of Global Aviation to Anthropogenic Climate Forcing for 2000 to 2018. Atmos. Environ. 2021, 244, 117834. [Google Scholar] [CrossRef] [PubMed]
- Grobler, C.; Wolfe, P.J.; Dasadhikari, K.; Dedoussi, I.C.; Allroggen, F.; Speth, R.L.; Barrett, S.R. Marginal Climate and Air Quality Costs of Aviation Emissions. Environ. Res. Lett. 2019, 14, 114031. [Google Scholar] [CrossRef]
- European Council. Paris Agreement on Climate Change. 2020. Available online: https://www.consilium.europa.eu/en/policies/climate-change/paris-agreement/ (accessed on 1 July 2020).
- ICAO (International Civil Aviation Organization). Operational Opportunities to Reduce Fuel Burn and Emissions; Document 10013; International Civil Aviation Organization: Montreal, QC, Canada, 2014. [Google Scholar]
- Hwang, J.-H.; Lee, T.-G.; Hwang, S.-S. A Study of Optimized Operation for CO2 Emission and Aircraft Fuel Reduced Operation Procedures. J. Korean Soc. Aviat. Aeronaut. 2013, 21, 62–70. [Google Scholar] [CrossRef] [Green Version]
- Hamy, A.; Mendoza, A.M.; Botez, R. Flight Trajectory Optimization to Reduce Fuel Burn and Polluting Emissions Using a Performance Database and ANT Colony Optimization Algorithm, AEGATS ’16 Advanced Aircraft Efficiency in a Global Air Transport System; Espace Publications: Westmount, QC, Canada, 2016. [Google Scholar]
- Serafino, G. Multi-objective Aircraft Trajectory Optimization for Weather Avoidance and Emissions Reduction. In Modelling and Simulation for Autonomous Systems, MESAS 2015; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2015; p. 9055. [Google Scholar]
- Lindner, M.; Rosenow, J.; Fricke, H. Aircraft Trajectory Optimization with Dynamic Input Variables. CEAS Aeronaut. J. 2020, 11, 321–331. [Google Scholar] [CrossRef]
- Matthes, S.; Lührs, B.; Dahlmann, K.; Grewe, V.; Linke, F.; Yin, F.; Shine, K.P. Climate-Optimized Trajectories and Robust Mitigation Potential: Flying ATM4E. Aerospace 2020, 7, 156. [Google Scholar] [CrossRef]
- Koenig, R.; Macke, O. Evaluation of Simulator and Flight Tested Noise Abatement Approach Procedures. In Proceedings of the 26th International Congress of the Aeronautical Sciences, Anchorage, AK, USA, 14–19 September 2008. [Google Scholar]
- Strumpfel, C.; Hubner, J. Aircraft Noise Modeling of Departure Flight Events Based on Radar Tracks and Actual Aircraft Performance Parameters; DAGA Jahrestagung für Akustik: Hamburg, Germany, 2020; Volume 6, p. 19. [Google Scholar]
- Filippone, A. Steep-Descent Maneuver of Transport Aircraft. J. Aircr. 2007, 44, 1727–1739. [Google Scholar] [CrossRef]
- Kim, B.; Rachami, J. Aircraft Emissions Modeling under Low Power Conditions. In Proceedings of the A & WMA’s 101st Annual Conference and Exhibition, Portland, OR, USA, 24–27 June 2008. [Google Scholar]
- DuBois, D.; Paynter, G.C. Fuel Flow Method 2 for Estimating Aircraft Emissions; Technical Paper Series 2006-01-1987; SAE Publications: Washington, DC, USA, 2006. [Google Scholar]
- ICAO Aircraft Engine Emissions Databank. 2022. Available online: https://www.easa.europa.eu/domains/environment/icao-aircraft-engine-emissions-databank (accessed on 15 June 2022).
- Wey, C.C.; Anderson, B.E.; Wey, C.; Miake-Lye, R.C.; Whitefield, P.; Howard, R. Aircraft Particle Emissions eXperiment (APEX); NASA/TM 2006-214382; ARC (Aerospace Research Center): Columbus, OH, USA, 2006. [Google Scholar]
- Hadaller, O.J.; Momenthy, A.M. The Characteristics of Future Fuels; Boeing Publication D6–54940; SAGE Publications: New York, NY, USA, 1989. [Google Scholar]
- Schaefer, M.; Bartosch, S. Overview on Fuel Flow Correlation Methods for the Calculation of NOx, CO and HC Emissions and Their Implementation into Aircraft Performance Software; Technical Report; DLR: Köln, Germany, 2013. [Google Scholar]
- Otero, E.; Ringertz, U. Case Study on the Environmental Impact and Efficiency of Travel. CEAS Aeronaut. J. 2021, 13, 163–180. [Google Scholar] [CrossRef]
- Federal Aviation Administration (FAA). Emissions and Dispersion Modeling System (EDMS) User’s Manual; Version 5; Federal Aviation Administration: Washington, DC, USA, 2007.
- Aviation Environmental Design Tool (AEDT). 2022. Available online: https://aedt.faa.gov/ (accessed on 15 June 2022).
- ECAC. ECAC.CEAC Doc 29, 4th ed.; Report on Standard Method of Computing Noise Contours around Civil Airports, Technical Guide; ECAC: Neuilly-sur-Seine, France, 2016; Volume 2. [Google Scholar]
- SAE-AIR-1845; Procedure for the Calculation of Airplane Noise in the Vicinity of Airports. SAE Publications: Newbury Park, CA, USA, 1986.
- EUROCONTROL. The Aircraft Noise and Performance (ANP) Database. 2022. Available online: https://www.aircraftnoisemodel.org/ (accessed on 4 July 2022).
- ISO 9613-1; Acoustics—Attenuation of Sound during Propagation Outdoors—Part 1: Calculation of the Absorption of Sound by the Atmosphere. International Organization for Standardization: Geneva, Switzerland, 1993.
- ANSI/ASA S1.26-2014; Methods for Calculation of the Absorption of Sound by the Atmosphere. American National Standards Institute: Washington, DC, USA, 2014.
- SAE-ARP-5534; Aerospace Recommended Practice, Application of Pure-Tone Atmospheric Absorption Losses to One-Third Octave-Band Level. SAE Publications: Newbury Park, CA, USA, 2013.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dimensions | |
|---|---|
| Length | 39.5 m |
| Wing span | 34.3 m |
| Wing reference area (S) | 124.6 m |
| Max take-off weight (MTOW) | 79,000 kg |
| Max fuel load | 26,000 L |
| Passengers | max. 189 |
| Engine performance (CFM56-7B27) | |
| Max thrust | 121.4 kN/engine |
| Fuel flow at cruise (typical) | 2450 kg/h |
| Performance | |
| Max cruise speed | Mach 0.82 |
| Max cruise altitude | 41,000 feet (FL41) |
| FDR# | CO (kg) | HC (kg) | (kg) | (kg) | (kg) | (kg) | Fuel (kg) |
|---|---|---|---|---|---|---|---|
| 1 | 2.05 | 0.51 | 0.60 | 360.35 | 141.28 | 0.09 | 114.21 |
| 2 | 1.30 | 0.05 | 1.11 | 478.59 | 187.64 | 0.12 | 151.69 |
| 3 | 1.62 | 0.34 | 1.03 | 448.95 | 176.02 | 0.11 | 142.30 |
| 4 | 1.40 | 0.30 | 1.71 | 601.73 | 235.93 | 0.15 | 190.72 |
| 5 | 1.64 | 0.43 | 1.13 | 461.26 | 180.85 | 0.12 | 146.20 |
| 6 | 1.47 | 0.29 | 1.28 | 508.94 | 199.54 | 0.13 | 161.31 |
| FDR# | CO | HC | Fuel | ||||
|---|---|---|---|---|---|---|---|
| 1 | 6 | 6 | 1 | 1 | 1 | 1 | 1 |
| 2 | 1 | 1 | 3 | 4 | 4 | 4 | 4 |
| 3 | 4 | 4 | 2 | 2 | 2 | 2 | 2 |
| 4 | 2 | 3 | 6 | 6 | 6 | 6 | 6 |
| 5 | 5 | 5 | 4 | 3 | 3 | 3 | 3 |
| 6 | 3 | 2 | 5 | 5 | 5 | 5 | 5 |
| FDR1 | CO (kg) | HC (kg) | (kg) | (kg) | (kg) | (kg) | Fuel (kg) |
|---|---|---|---|---|---|---|---|
| Original | 7.24 | 1.57 | 1.42 | 928.61 | 364.09 | 0.24 | 294.33 |
| CO/HC-optimized | 4.20 | 0.10 | 2.72 | 1324.03 | 519.12 | 0.34 | 419.66 |
| Reduction factor | 1.72 | 15.7 | - | - | - | - | - |
| Increase factor | - | - | 1.92 | 1.43 | 1.43 | 1.42 | 1.43 |
| FDR1 | CO (kg) | HC (kg) | (kg) | (kg) | (kg) | (kg) | Fuel (kg) |
|---|---|---|---|---|---|---|---|
| Original | 9.41 | 2.19 | 2.80 | 1306.56 | 512.27 | 0.33 | 414.12 |
| Optimized | 6.61 | 0.52 | 2.40 | 1307.33 | 512.57 | 0.33 | 414.37 |
| Reduction factor | 1.42 | 4.21 | 1.17 | ∼1 | ∼1 | 1 | ∼1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Otero, E.; Tengzelius, U.; Moberg, B. Flight Procedure Analysis for a Combined Environmental Impact Reduction: An Optimal Trade-Off Strategy. Aerospace 2022, 9, 683. https://doi.org/10.3390/aerospace9110683
Otero E, Tengzelius U, Moberg B. Flight Procedure Analysis for a Combined Environmental Impact Reduction: An Optimal Trade-Off Strategy. Aerospace. 2022; 9(11):683. https://doi.org/10.3390/aerospace9110683
Chicago/Turabian StyleOtero, Evelyn, Ulf Tengzelius, and Bengt Moberg. 2022. "Flight Procedure Analysis for a Combined Environmental Impact Reduction: An Optimal Trade-Off Strategy" Aerospace 9, no. 11: 683. https://doi.org/10.3390/aerospace9110683