1. Introduction
At present, aviation focuses on economic, fuel-efficient, and long-endurance systems that incur low operating costs. The growing demand for airborne operations has resulted in the adoption of unmanned aircraft that can remain in the air for significantly longer times than aircraft with pilots on board. The UAV design has been developed extensively to attain these objectives. At present, UAVs can have an endurance of more than a day [
1,
2].
Engines that consume fuel are not the solution to the ever-growing demands for airborne time. The endurance of an aircraft must satisfy the mission requirement, which can be a few hours (broadcasting a soccer match), a few days (border patrolling, search and rescue missions), or even years (continuous surveillance, communication relay, and meteorological investigations). Exceptional endurance of months or years is possible with a solar-powered aircraft. Photovoltaic cells mounted on wings can be used to capture solar energy during the daytime. A part of this energy can be used directly to run the propulsion system and onboard electronics, and the remaining part can be stored in onboard batteries for use during the night. If sufficient solar energy can be stored in onboard batteries during the day to last the succeeding night, we can design an aircraft that can fly for years. Theoretically, these solar-powered aircraft can fly forever, and their endurance is limited only by the reliability of the subsystems.
Solar airplanes can be divided into two categories: high altitude long endurance and low altitude long endurance aircraft. Zephyr [
3] and Solara [
4] are examples of high altitude long endurance solar aircraft. Designed by QinetiQ, Zephyr achieved three world records in July 2010. The UAV was launched for flight trials on 9 July 2010, and stayed aloft for 14 nights (336 h 22 min) at an altitude of 70,740 ft (21,561 m) above the US Army’s Yuma Proving Ground in Arizona. Sky-Sailor [
5], Solong [
6], and AtlantikSolar [
7] are examples of low altitude long endurance solar UAVs. These solar UAVs have demonstrated the potential for perpetual flight and the advantages of solar technology. The present work is also about the design and optimization of fixed-wing low altitude long endurance solar-powered UAVs.
The design process of solar airplanes was not published in the early stages of solar flights [
5]. During the past decade, many authors published literature explaining the design process of solar UAVs. However, most of these designs were limited to the theoretical level and did not reach the proof-of-concept phase [
8,
9,
10,
11,
12,
13,
14]. Certain designs were manufactured and successfully flown to validate different flight parameters, although these were not tested for a full day–night flight [
15,
16,
17,
18,
19,
20,
21]. Very few designs have demonstrated perpetual flight capability [
5,
6,
7].
As far as airfoil selection is concerned, most of the literature compared few airfoils and selected the airfoil with the best lift-to-drag ratio and minimum moment coefficient. The authors in [
22] studied 150 airfoils and selected E178 airfoil due to its smooth upper surface. Similarly, [
23] discussed MH114, NACA4412, and SD7073 and choose MH114 because of the higher lift-to-drag ratio and large thickness at the trailing edge to facilitate any avionics installation. A similar procedure was adopted in [
10,
14]. Matter et al. [
24] developed an Xfoil-Matlab interface to optimize solar UAV airfoil at a Reynolds number of 2.0 × 10
5. The optimized airfoil showed an increase of 13% in the lift-to-drag ratio. The authors in [
25] also used the genetic algorithm to optimize solar-powered UAV airfoil to maximize the radiation incidence and lift coefficient and minimize the drag by lift ratio. Betancourth et al. [
9] selected E212 and the upper surface was considered as a polyline connected by several short line sections. Thereby, it was possible to arrange photovoltaic cells without considerable deformation [
26]. In the design of Sky-Sailor [
5], W. Engel designed a special airfoil named WE3.55-9.3. The design procedure and objectives were not published. In the proposed framework, the airfoil design is integrated into solar UAV design. Airfoil is also considered a design variable along with wingspan, chord, horizontal and vertical tail span, chord and axial location of the tail assembly. Hence, it is possible to design airfoil considering the overall performance of the UAV. Secondly, if the airfoil changes, rib and wing skin will also change, consequently changing the weight of the UAV. The proposed framework also caters for such changes.
The accurate prediction of the structural mass of a solar UAV is very important. Several mass estimation models are discussed in the literature. A real and simplified airplane structure was dimensioned and actual shear force and bending moment were calculated for the wing and fuselage for the given load case in [
11,
27]. This method showed deviation from actual data. Noth [
5] concluded that models based on the data of HALSOL and twin-boom aircraft [
28,
29] could not be used for small land-launched solar UAVs. He collected data of over 400 models and sailplanes and ranked solar UAVs in the top 5% in terms of build quality. This model is widely used to predict the structure mass of solar UAVs [
10,
15,
16,
19,
30,
31,
32]. As presented in
Section 2.3.3, this model also failed to predict the structural mass accurately. The estimation of the structural mass of solar UAVs is significantly influenced by the materials, structural design and layout (double spare, single spare, D-box). In the present study, the UAV dimensions, structural layout, design, and density of materials are used to predict the structural mass. The proposed model is validated with an existing solar UAV with high accuracy.
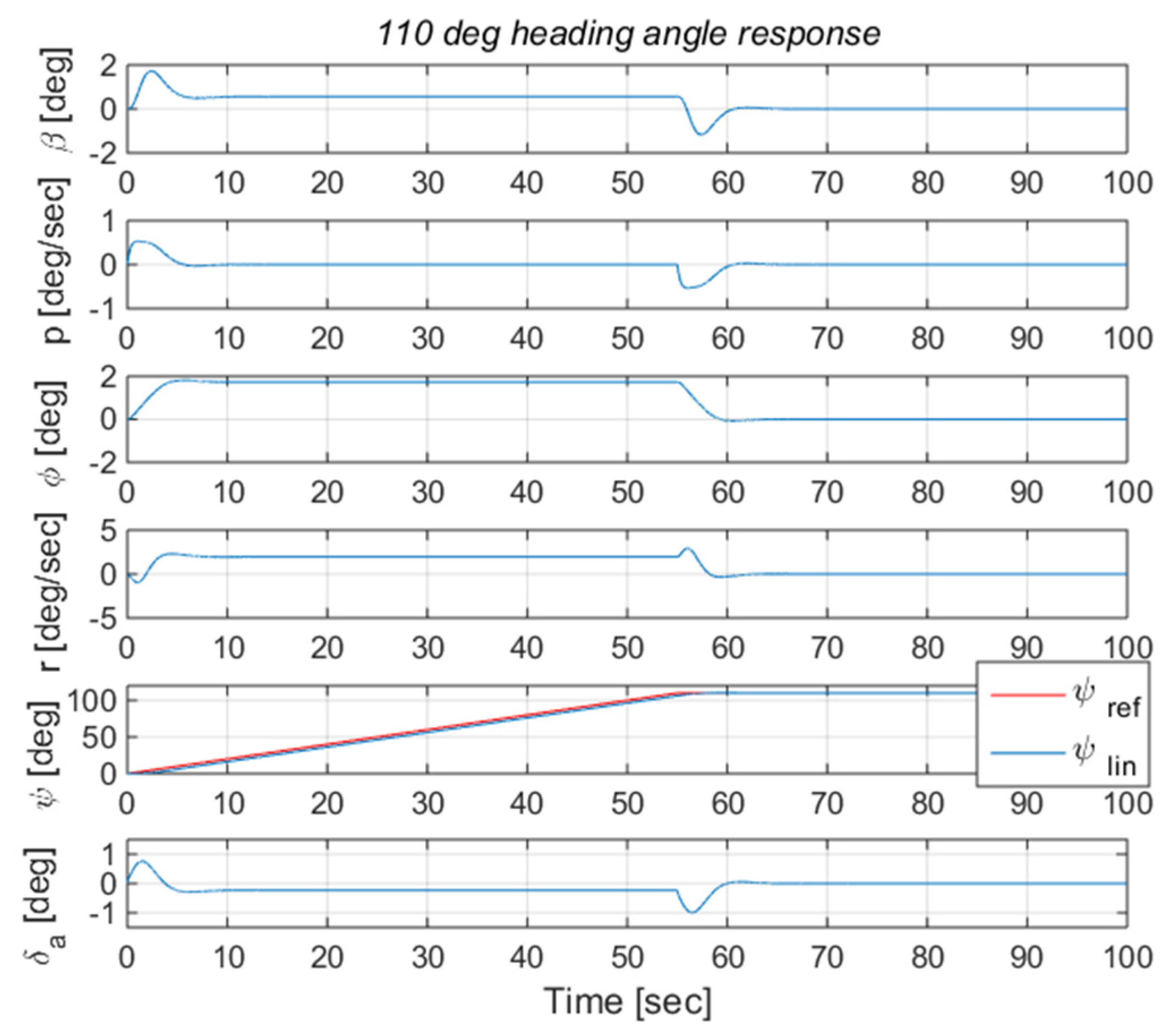
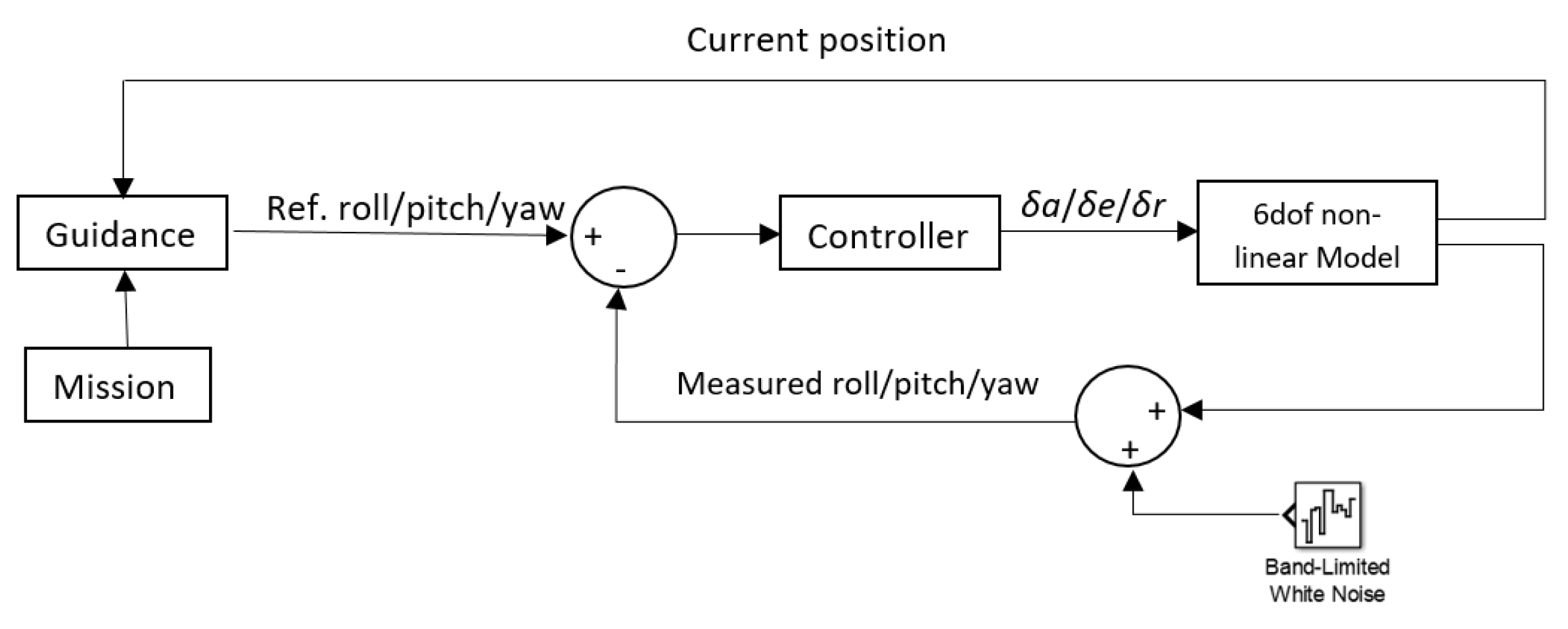
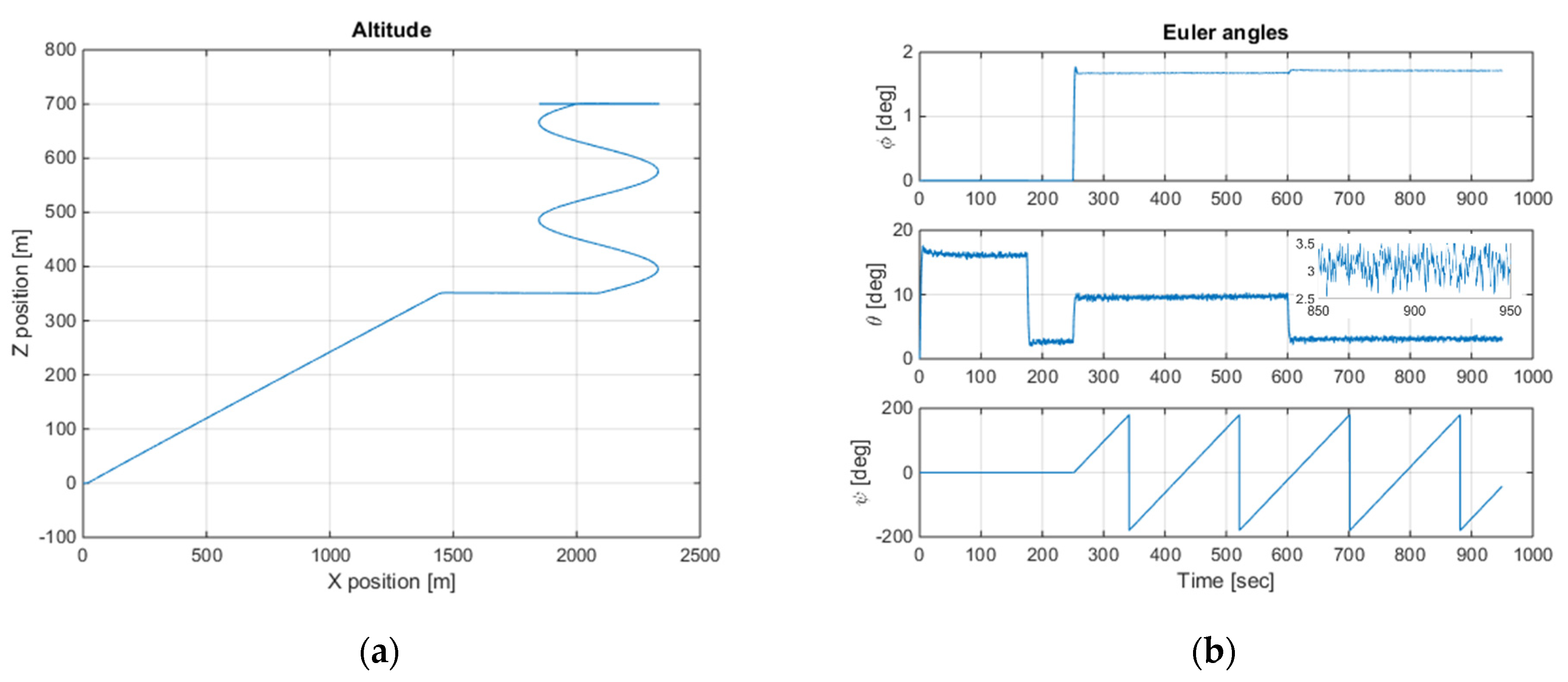
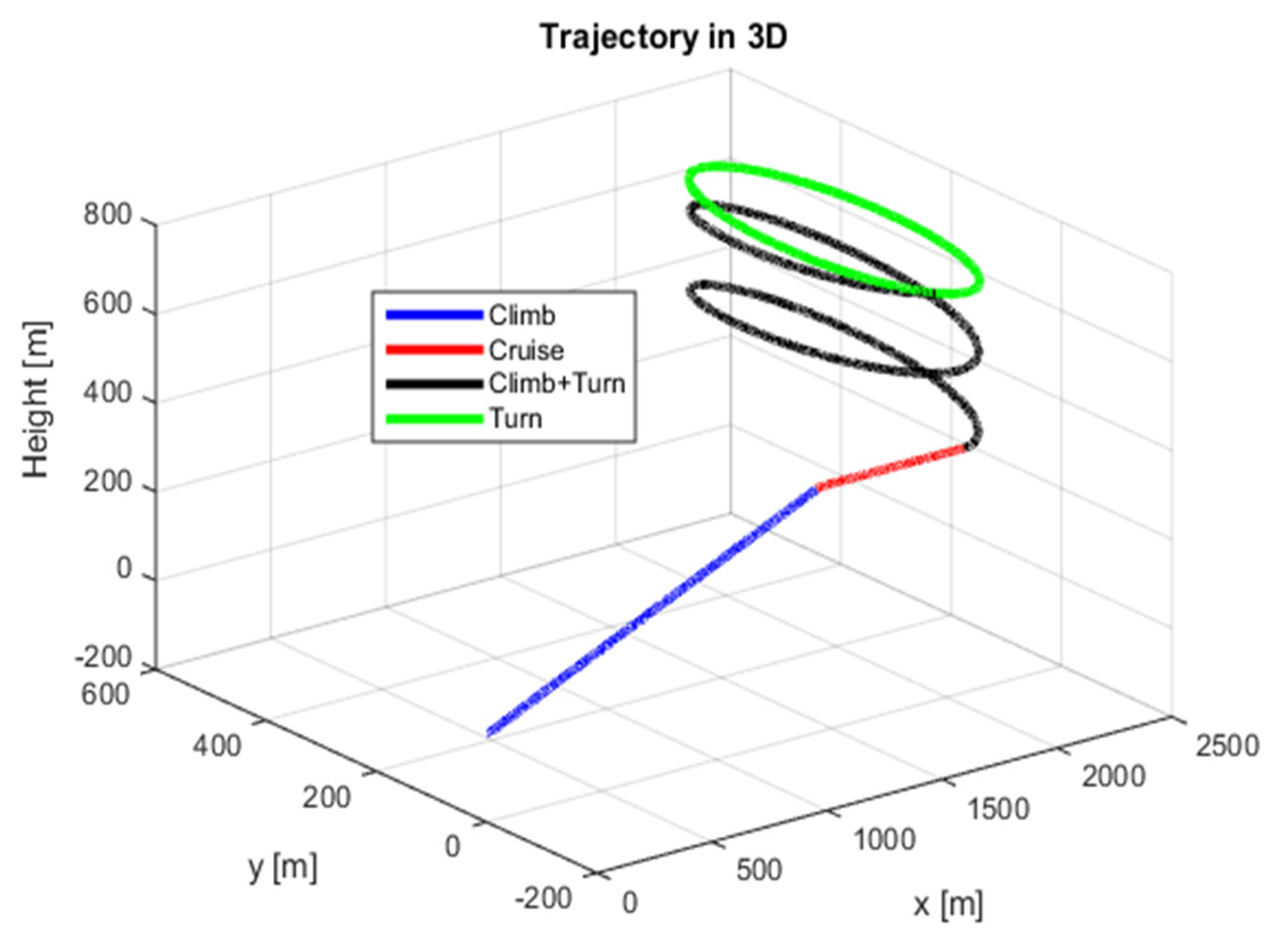
Naturally, the solar UAV configuration must also be stable. Static stability is often measured in terms of the static margin. The literature discussed above provides no guideline about the static margin for solar UAVs. In the proposed framework, the solar UAV is optimized for a user-specified static margin. The optimization is performed for cruise conditions. The Matlab genetic algorithm is used for optimization. Only static stability is incorporated in the optimization framework. To ensure dynamic stability, the dynamic response of the optimized solar-powered UAV is studied. In addition, longitudinal and lateral controls are developed for the optimized configuration. An inner–outer loop control strategy is used with an LQR and PID controller, respectively. Finally, 6-DOF nonlinear simulation is performed in Matlab Simulink to validate the design process and control system.
The remainder of this paper is organized as follows: The design methodology is presented in
Section 2, including mass estimation, airfoil parameterization, and stability. The optimization framework is discussed in
Section 3. The design of the solar UAV and the optimization results are discussed in
Section 4. The dynamic analysis, linear control system design and nonlinear 6-DOF results of the optimized configuration are presented in
Section 5.
Section 6 presents a few conclusions and discussions, followed by the References section.
3. Optimization Framework
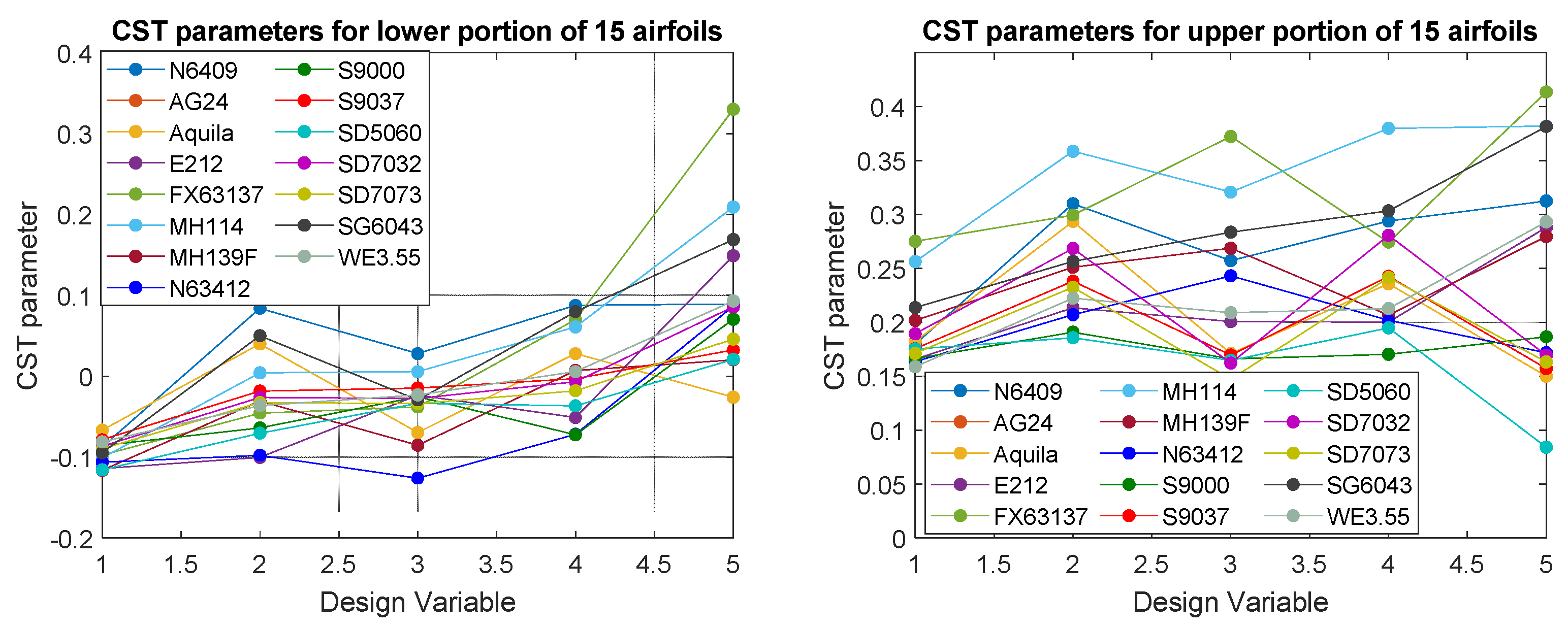
The optimization framework is modeled in Matlab using the genetic algorithm (GA) with selection, mutation and crossover functions. Seventeen design variables are considered. The first 10 design variables are the CST parameters for the airfoil. The lower and upper bounds for the airfoils are based on 15 airfoils recommended for the design of solar UAVs in different publications. These airfoils are parameterized using CST. For each parameter, the highest and lowest of the values of all the airfoils are used as the upper and lower bounds, respectively (
Figure 4).
This results in very wide design space and the possibility of the production of non-feasible and unsmooth airfoils. The airfoils produced during optimization are passed through a series of assessments (maximum thickness, camber, curvature of the lower portion, and quality of the trailing edge) to ensure a feasible and smooth airfoil. The details of the design variables are listed in
Table 4. There is no geometric and aerodynamic twist in the wing. The wing planform is a rectangle without taper and sweep. The dihedral angle of 7° is used from 45% of the wing semi-span for this study. The tail is a simple T-shape design with the horizontal tail mounted at the top of the vertical tail. The fuselage is not considered in the optimization, as recommended by the developer of Xflr5 (Xflr5 GUI). However, the fuselage and tail boom’s skin friction drag and form drag are considered in the optimization and calculated using W.H. Mason’s FRICTman code [
37].
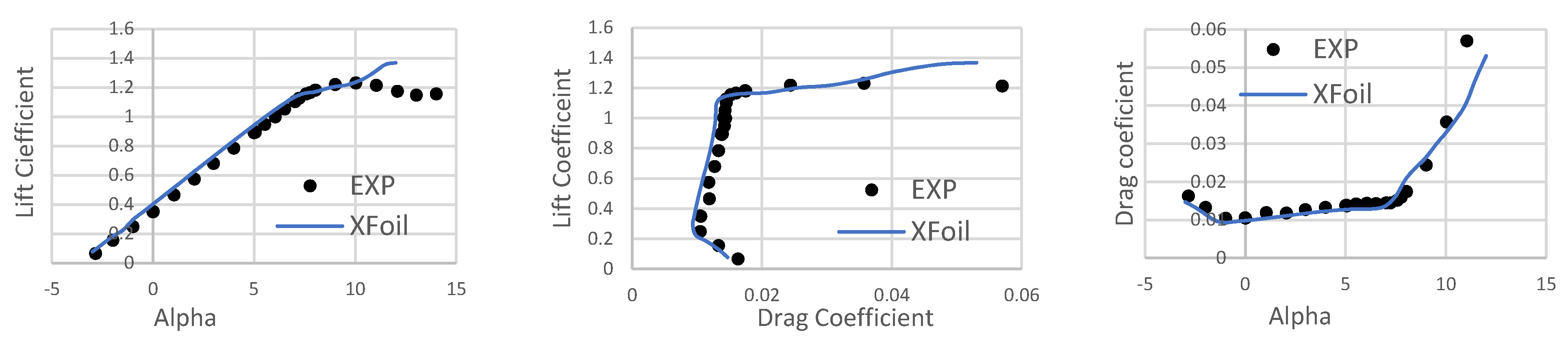
During optimization, Xflr5 is used to obtain aerodynamic coefficients. Xflr5 is an analysis tool for airfoils based on Xfoil’s airfoil analysis and also includes wing design and analysis capabilities using the lifting line theory, vortex lattice method and 3D panel model. The validation of Xfoil with experimental data of E387 airfoil at Reynolds number 2.0 × 10
5 is shown in
Figure 5. The results are in good agreement in the linear region. As solar UAVs fly at a lower angle of attack, Xflr5 is a good choice for preliminary design.
The analysis is performed in the following sequence:
Matlab GA provides 17 design variables.
The first 10 variables are used for airfoil generation using CST. The quality of the CST airfoil is assessed. When the airfoil is not smooth, the iteration is terminated, the objective function is assigned a value of 200, and the next set of design variables is considered. When the airfoil is smooth, we proceed to Step 3.
The CST airfoil and other geometry parameters are used to perform aerodynamic analysis in Xflr5. A VB script is written that calls the Xflr5.exe, writes all the variables in the respective fields, performs analysis, and writes the output file.
Matlab reads the Xflr5 output file. This file contains all the aerodynamic forces and moment coefficients. The pitching moment coefficient is transferred to the required C.G. location calculated from the static and neutral points using Equation (14).
The trim (zero pitching moment) angle of attack and the corresponding lift and drag coefficients are calculated.
The structural mass of the solar UAV is calculated (
Section 2.3.3).
The total mass is calculated by solving a cubic equation as presented in [
5].
Equations (1), (6) and (9)–(13). If the required solar cell area is greater than the wing area, the iteration is terminated, the objective function is assigned a value of 200, and the next set of design variables is considered.
If the required solar cell area is less than the wing area, the objective function is calculated as follows:
The first term ensures that the lift produced is equal to the weight, whereas the second term helps to decrease mass and increase . The number of generations is set to 100 with a population size of 25.
4. Design of Solar UAV
The solar UAV is designed to fly over a specific location on a specific day of the year. Given these specifications,
and
are retrieved. The designed UAV is oriented to fly for
hours. The next step is to add robustness to the design [
7].
The first consideration is to have multiple-day endurance,
. This implies a window of a specific number of days or months for flight operation. To achieve this, the additional night duration, owing to date change, must be considered:
Meteorological factors such as clouds and water fog in the early morning and evening,
, and aggressive flight conditions during the night,
, such as gusts, may result in additional power consumption. The total demand surplus time is:
This design is not fully robust. This is because the energy stored in the batteries starts to drain when the available solar power is less than the power required for level flight, which can occur more than 1 h before sunset. To illustrate this, a solar UAV is designed to perform a full-night operation in Beijing or Tianjin (40° N). The optimum time to perform a full night operation is 21 June, when
h and
h. In this design (referred to as Design-1),
= zero. This implies that we assume ideal conditions during flight. The input parameters for the design process are listed in
Table 5.
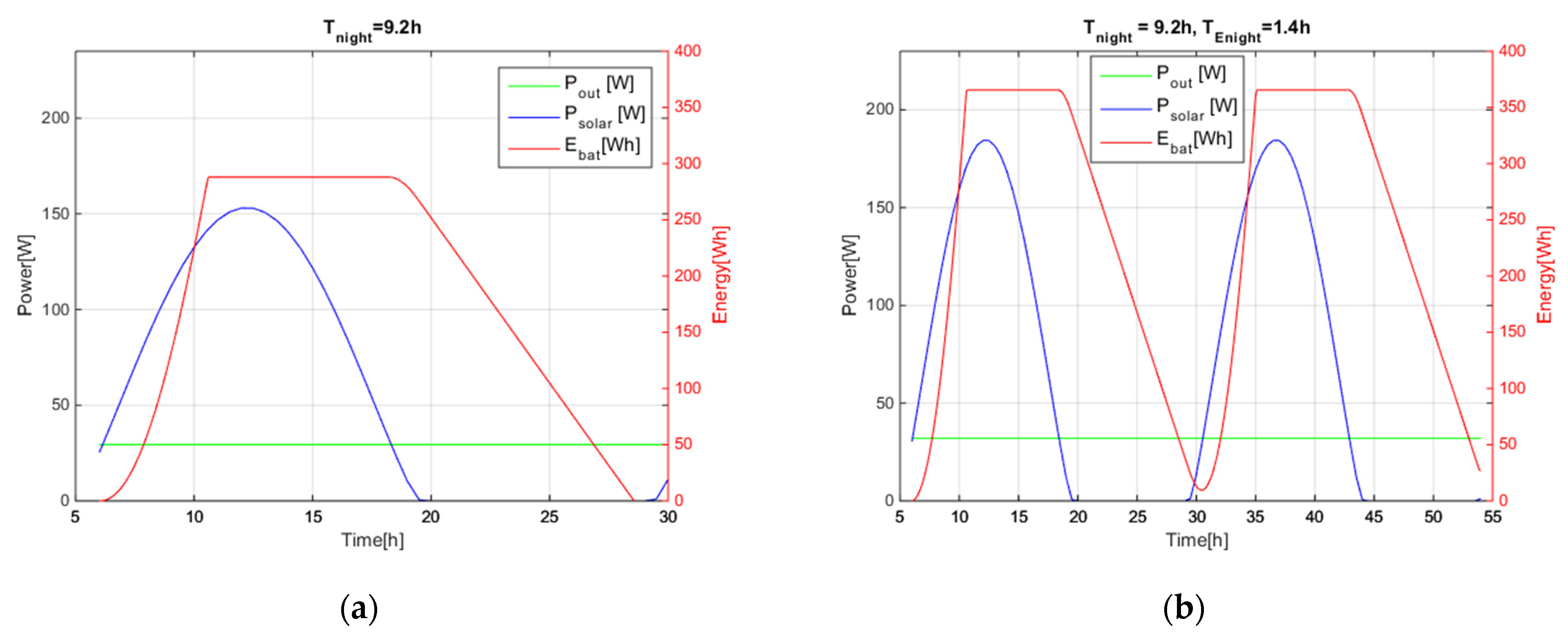
The energy simulation for Design-1 is shown in
Figure 6a. It is evident that although the battery is designed for
, it is insufficient for a continuous 24 h flight and is drained completely before sunrise. This is because the battery starts to supply the energy when the available solar power is less than the power required to maintain level flight. In this case, it is approximately 1.4 h earlier than sunset. In the next design (referred to as Design-2), an additional time of 1.4 h (denoted as
) is included. The energy simulation for Design-2 is presented in
Figure 6b. This design demonstrates the capability for continuous 24 h flight. The battery shows a minimum capacity of 10.8 Wh at sunrise, which corresponds to less than half an hour of flight. Although Design-2 displays potential, it is an ideal design. To add robustness, Equation (22) is incorporated (referred to as Design-3). The associated parameters are as follows:
is the cloud or fog thickness factor [
38] and is considered to be 0.2.
For a solar UAV that can perform multi-day operation during a three month window (1 May to 30 July),
,
, and
. Hence, for Design-3,
. The total required time of flight for batteries is given by:
An important parameter of a battery is the state of charge, SOC. It is defined as the current battery capacity to the rated battery capacity. The over-discharging of a battery can attenuate its usable capacity. In addition, the minimum SOC may be limited to 5–10% to increase the battery life cycle [
39]. A minimum SOC of 10% is imposed in Design-3. The output parameters for these three designs are listed in
Table 6.
The increase in the mass of the battery and total mass of the UAV owing to the additional time of flight is highly significant. Design-1 has a battery mass of 1.2 kg and a total mass of 4.22 kg. With the addition of
of 1.4 h, Design-2 has a battery mass of 1.52 kg and total mass of 5.04 kg. The further addition of a
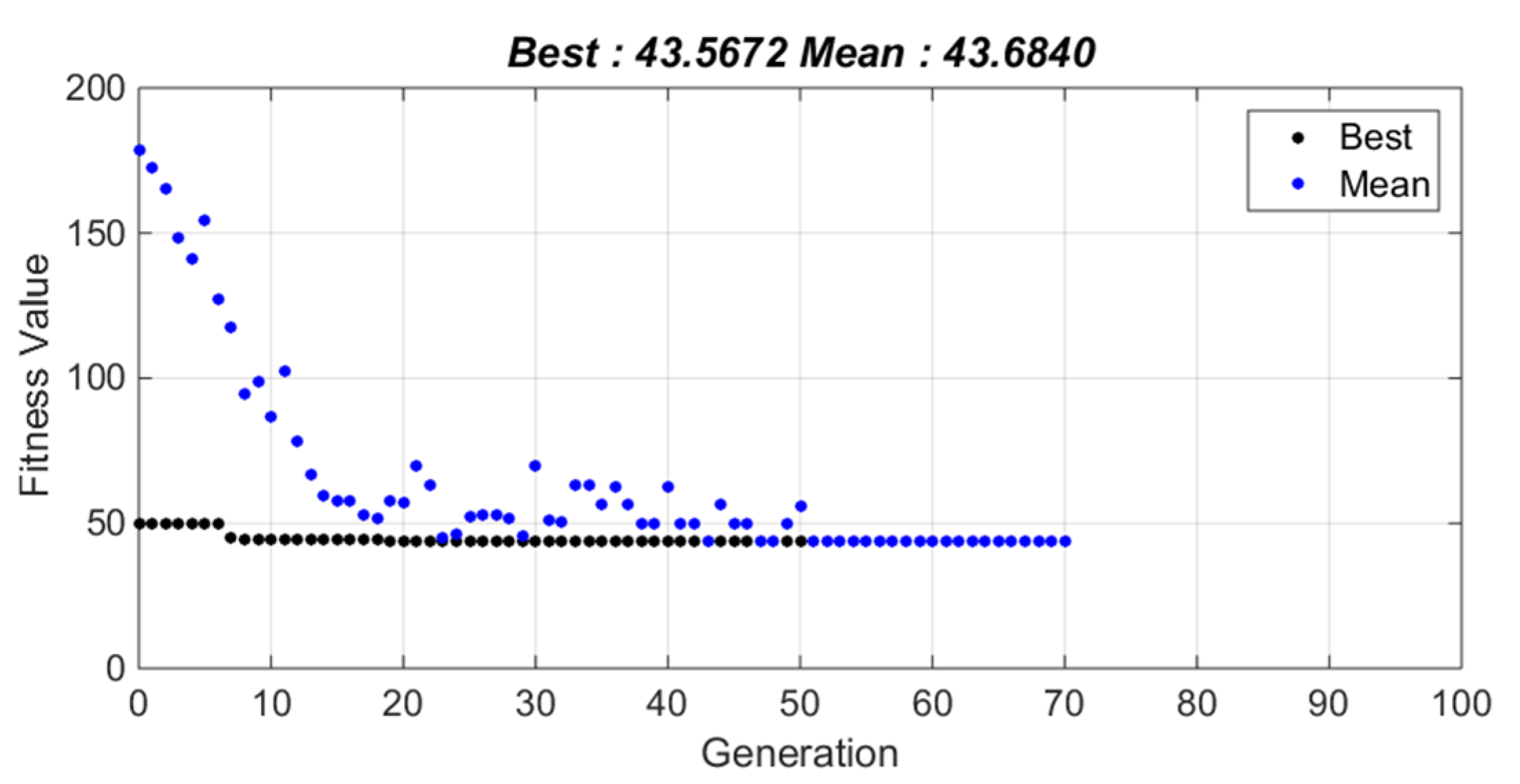
of 5.56 h and minimum SOC of 10% increases the battery mass to 3.4 kg and total mass to 7.1 kg. The convergence of the objective function is presented in
Figure 7. The mean and best values of the objective function for the last 20 generations are almost equal. This implies that all the configurations in the generation are identical. One design iteration requires 45 s on a personal i5 laptop with 16 GB RAM and 2.43 GHz processor. A total of 100 generations with 25 population sizes may require more than one day.
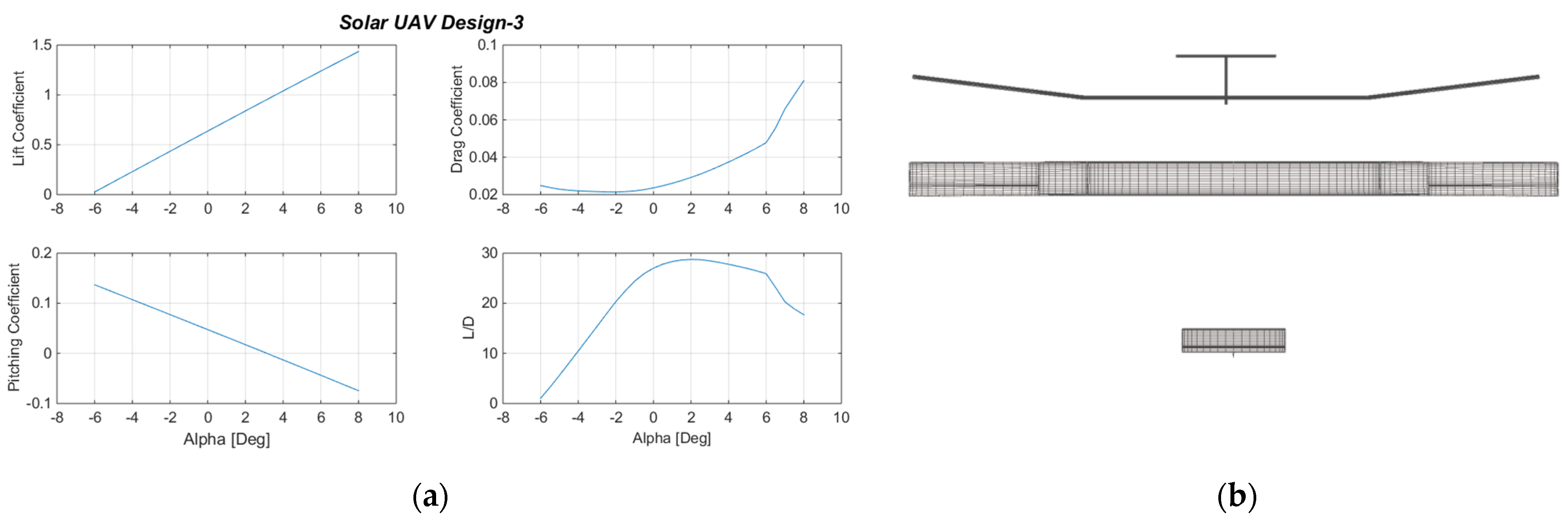
The lift, drag, and pitching moment coefficients and the lift-to-drag ratio of the optimized configuration are shown in
Figure 8a. The trim angle of attack is 3.1°, where the pitching moment is zero. For this trim angle of attack, the lift coefficient is 0.96, and the lift-to-drag ratio is 28.4 (which is nearly the maximum for this design). The Xflr5 model showing panels’ density and control surfaces is also shown in
Figure 8b.
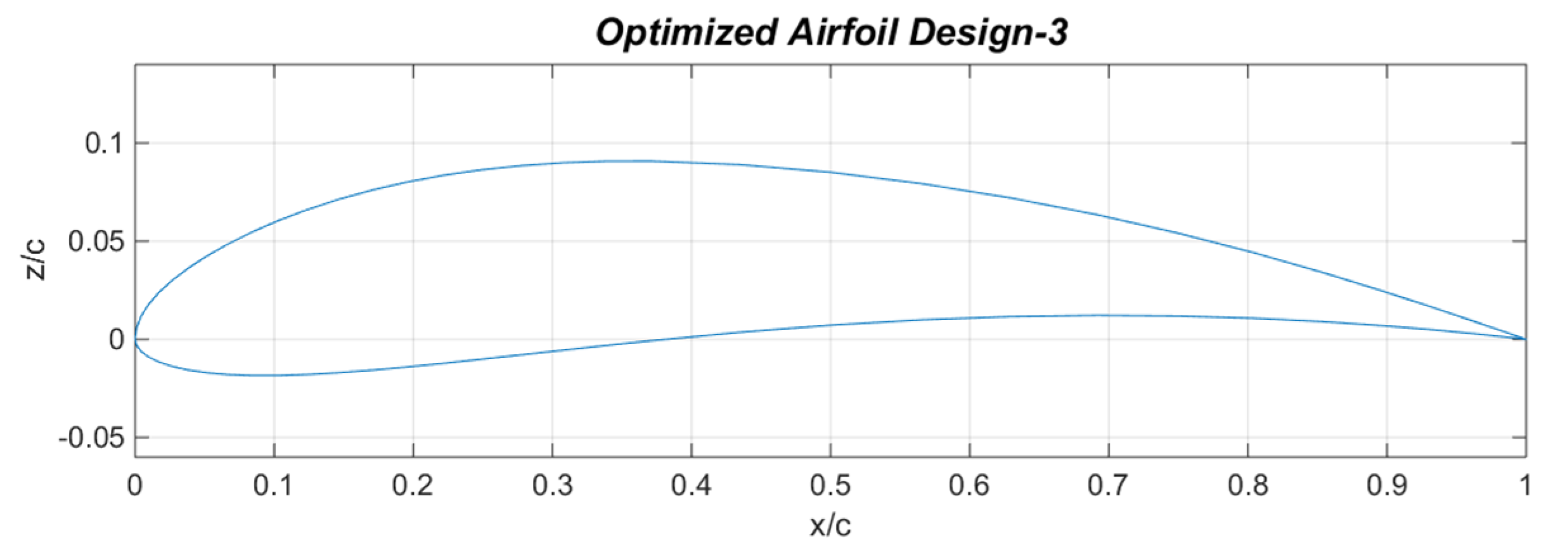
The optimized airfoil, shown in
Figure 9, has a thickness of 9.7% at 25% and a maximum camber of 4.6% at 43.5% of the chord. The airfoil is highly smooth, and the trailing edge quality is good.
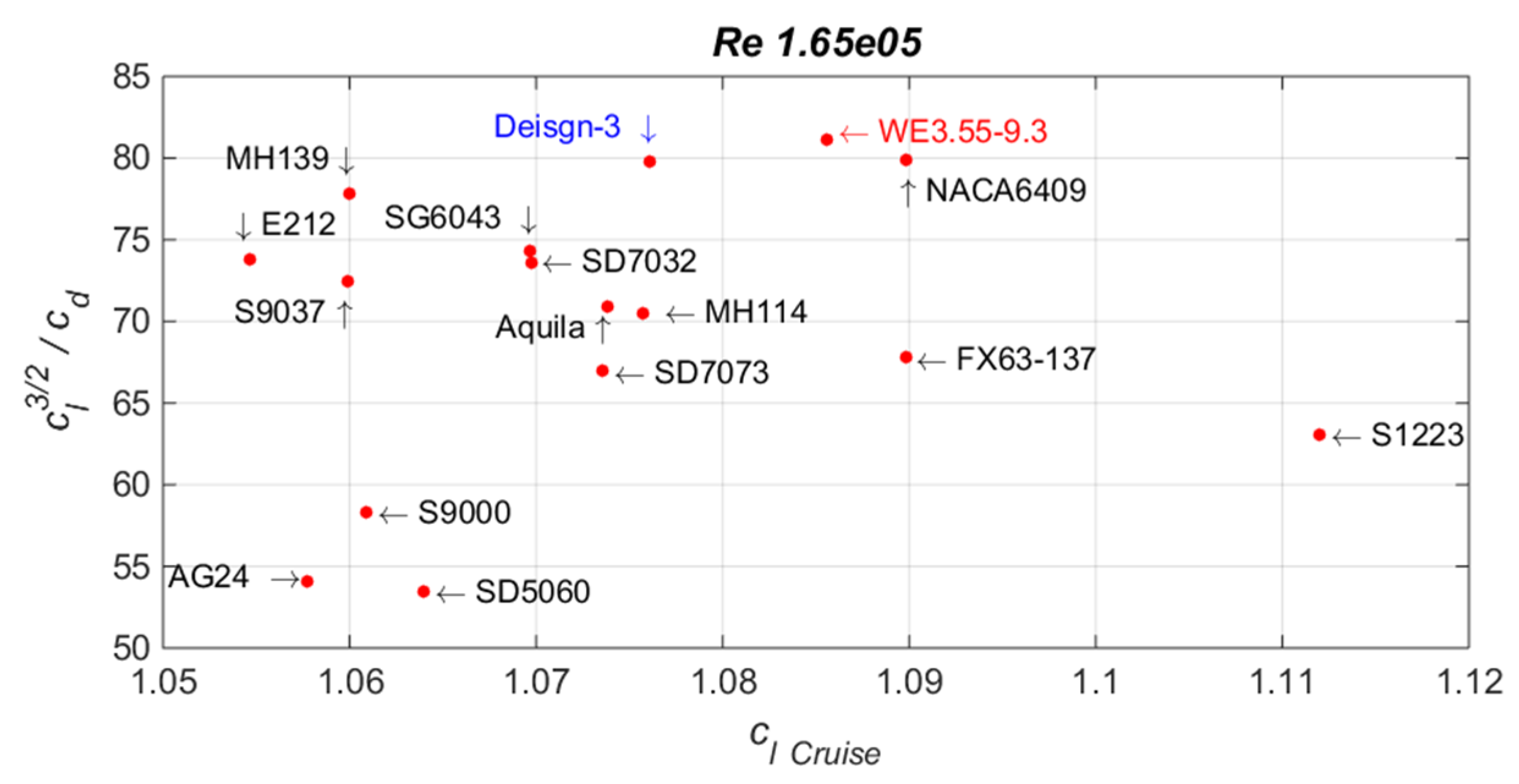
For Design-3, the wing incidence is set at 2°. As the steady-state alpha for Design-3 is 3.1°, the wing airfoil encounters a local incidence of 5.1° with a lift coefficient of 1.07. The Reynolds number for a cruise speed of 8.5 m/s is 1.65 × 10
5. Fifteen different airfoils suggested for solar UAVs in the literature are analyzed in Xflr5 at a Reynolds number of 1.65 × 10
5.
for these airfoils for a lift coefficient of approximately 1.07 are plotted in
Figure 10. The performance of optimized airfoil is higher than most of the airfoils and very close to Sky-Sailor [
5] airfoil. This plot clearly shows the importance of airfoil selection with regard to the design lift coefficient and drag coefficient. These airfoils can be used for this lift coefficient, but a few airfoils evidently operate at higher
.
The energy simulation for 21 June is presented in
Figure 11a. The
SOC is also shown in black color. The solar UAV takes off at 07:00 with a completely drained battery (
). The available solar power is higher than the required power. The batteries become completely charged (
) within 6 h. The available solar energy can be used to attain an altitude or increase speed. At approximately 19:00, the available solar power is less than that required, and the batteries start to supply energy. At 20:00, solar power becomes unavailable, and the UAV operates completely on batteries. The next morning, when the solar power is higher than required, the batteries show a remaining capacity of 335 Wh. This corresponds to an
SOC of 0.41.
A similar simulation for 1 May is also presented in
Figure 11b. Owing to the lower solar irradiation on 1 May, the battery takes a longer time to charge fully. More battery is consumed to perform full-night flight because of the increased night hours. The next morning, when the available solar power is equal to the required power, the battery shows a minimum SOC of 0.37. It is concluded that Design-3 has the potential to perform continuous flight operations. However, it is important to note that the charge margin time [
7] is reduced owing to the date change.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}