1. Introduction
Significant climate changes and potential environmental impact due to increased transportation in the near future have motivated many industries to focus on reducing CO
2 and NOx emissions. As a major transportation method, the aviation industry also follows the trend to reduce the emission of new generations of aircraft. Improvements in airframe and engine technologies increase aircraft efficiency and reduce their emission. However, a potential increase in air transportation may still lead to an increase in overall CO
2 and NOx emissions. Under Flightpath 2050 [
1], The European Commission has set a future challenge for the new generation of aircraft to reduce their total emission.
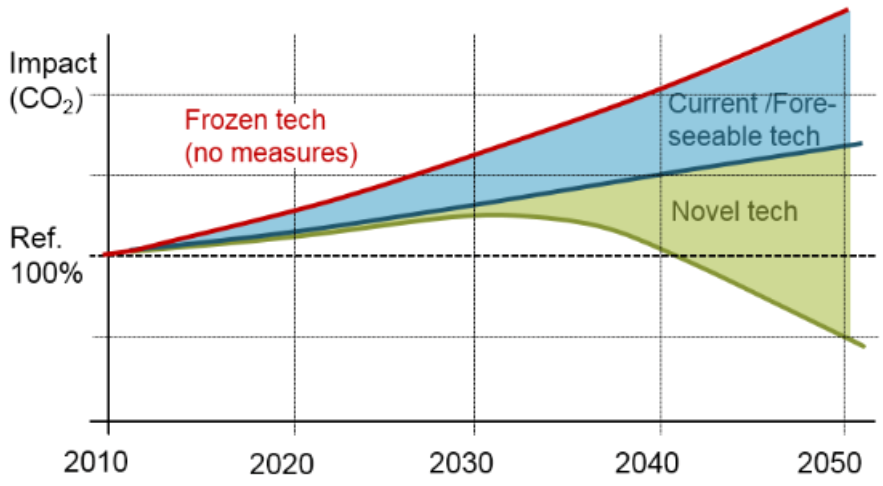
Figure 1 shows three schematic trends: if no advancements in aircraft technologies are present, if currently feasible technology advancements are achieved, and if novel technologies are introduced. This challenge leads to developing alternative environmentally-friendly energy sources as one of the main solutions for environmental impact reduction. Aircraft electrification has become one of the most popular approaches to reduce aircraft emissions. Today, many companies work in various directions to make electric flights available: improve battery energy capacity, modify and develop new propulsion systems, and introduce new aircraft configurations more applicable for future electrification.
At the moment, research is highly focused on hybrid- and all-electric propulsion systems and aircraft configurations to reduce the environmental impact produced by aircraft. Friedrich introduced a simulation technique for a single-seat hybrid-electric demonstrator, designed the aircraft, and performed a scaling analysis to determine a large fuel savings impact for the small- and mid-scale sector of aircraft [
2]. Hamilton investigated the effect of hybrid-electric aircraft from the operational perspective to reach an optimal aircraft operation with battery energy density constraints [
3]. A lot of work is also dedicated to the introduction of distributed electric propulsion (DEP) energy networks and aircraft concepts featuring DEP. Kim summarized major contributions towards the development of DEP aircraft and relative technologies [
4]. Finger focused on sizing methodologies, and aircraft design of future general aviation aircraft that could be not only hybrid-electric but also fully electric [
5,
6,
7]. De Vries also developed initial sizing methodologies for hybrid-electric aircraft for conceptual aircraft design but introduced effects of DEP at early conceptual design stages [
8,
9]. Pornet also introduced a sizing methodology for hybrid-electric aircraft and compared performance between the conventional reference aircraft and its hybrid version [
10]. Sgueglia introduced an MDO framework for hybrid-electric aircraft with coupled derivatives and performed various optimization analyses to demonstrate the capabilities of the framework [
11]. The work of Hepperle [
12] addressed the potentials and limitations of all-electric aircraft specifically and introduced aircraft modifications that could potentially improve the aircraft performance at given battery energy densities. The ultimate goal of aircraft electrification is to achieve a fully-electric flight at adequate aircraft weight characteristics to maximize the emission reduction at the aircraft level. However, the availability of all-electric aircraft is limited to the General Aviation sector due to low battery energy density compared to the Jet-A fuel and relatively low maximum power capabilities of modern electric motors. Multiple all-electric concepts have already been introduced or are being developed at the moment. From existing airplanes, Pipistrel has already certified a twin-seat all-electric aircraft that has a maximum speed of 185 km/h and a maximum range of 139 km [
13]. Bye Aerospace is currently performing flight tests on a one-seat general aviation aircraft that will be certified under the FAR Part 23 category. The eFlyer has a maximum cruise speed of 250 km/h and endurance of three hours [
14]. In 2016, Siemens tested an all-electric energy network by retrofitting the Extra 300 aerobatic aircraft and set two world records [
15]. The Equation Aircraft has also demonstrated an all-electric twin-seat amphibious aircraft with the empennage-mounted engine that can fly up to 240 km/h and up to 200 km [
16] Airbus has also developed several versions of an experimental all-electric E-fan aircraft to test the capabilities of an all-electric aircraft [
17]. The E-Fan concept had multiple versions, from a technology demonstrator to a production variant. MagniX has introduced an all-electric propulsion system and first retrofitted De Havilland Beaver and then 208B Cessna Grand Caravan. The electrified Caravan became the largest all-electric airplane until today [
18]. It must be noted that the list of existing all-electric aircraft companies is incomplete and more companies exist and are at different design stages.
To achieve all-electric regional aviation faster, not only the energy source and propulsion system technologies must be improved, but also advanced airframe technologies need to be considered. Such novel technologies may significantly increase the aircraft performance characteristics and overall efficiency that will enable earlier integration of all-electric commercial aircraft into the market before. Liu introduced initial estimations of the impact of novel technologies for a range of aircraft from the short-range to the long-range [
19]. Results showed that novel airframe technologies may significantly improve aircraft energy efficiency.
Under the Excellence Cluster Se
2A (Sustainable and Energy Efficient Aviation), three energy-efficient aircraft are to be designed to cover the majority of commercial aircraft operations.
Figure 2 shows three sample new energy-efficient airplanes: a short-range propeller aircraft that shall be applicable to the ATR-72, the medium-range aircraft having similar mission requirements to the Airbus A320, and the long-range aircraft to cover ranges similar to the Boeing B777.
The initial cluster requirement for the short-range aircraft was to investigate the feasibility and availability of an all-electric short-range aircraft if novel airframe and propulsion technologies are introduced. A few novel technologies have been considered for the design of future regional aircraft. Hybrid laminar flow control (HLFC), load alleviation, and advanced materials and structure concepts. In addition, high-temperature superconducting motors and high-energy capacity batteries have been considered for the present research. An aircraft with similar top-level requirements as ATR-72 is designed considering the mentioned technologies and a battery-based full electric propulsion system.
The present work is divided into multiple sections.
Section 2 describes novel technologies implemented in the new short-range aircraft.
Section 3 describes methodologies, models, assumptions, and software used to perform novel technology assessments to design the aircraft.
Section 4 describes the aircraft’s top-level requirements (TLRs).
Section 5 describes the aircraft concept selection and its initial sizing.
Section 6 presents multidisciplinary design optimization studies of the SE
2A aircraft to refine the design and make important design decisions. Finally,
Section 7 assesses the influence of novel technologies on aircraft availability and the strength of each technology impact.
6. SE2A SR Design Refinement Using MDO
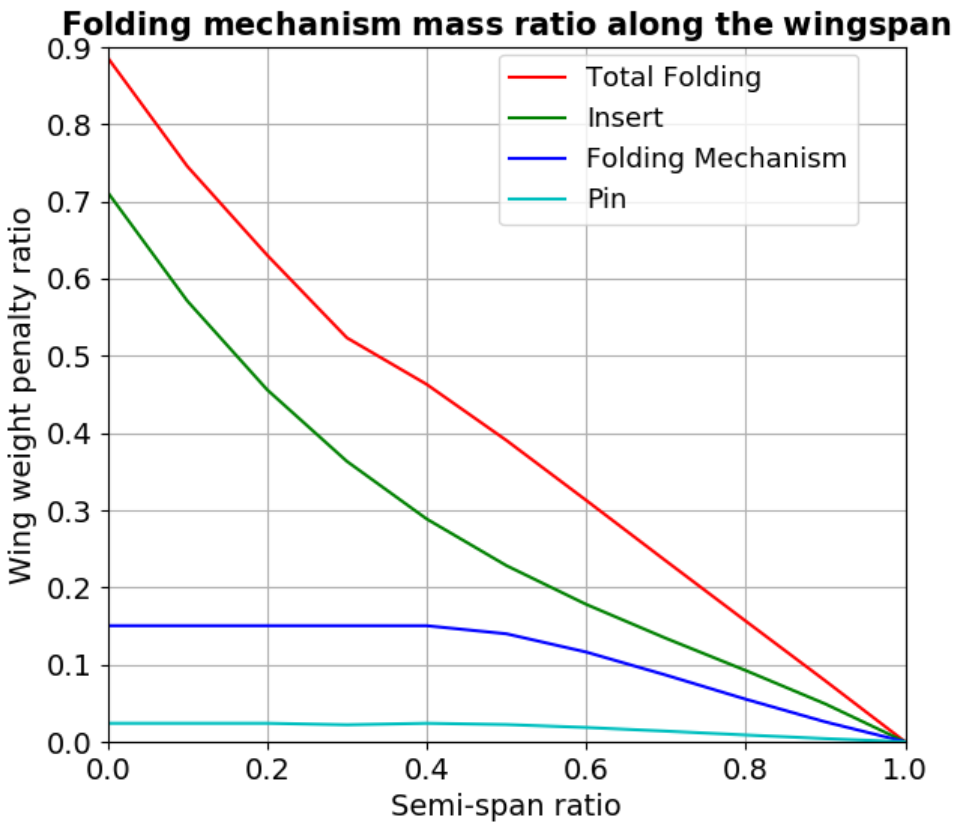
To refine the initial design, a set of multi-disciplinary design optimizations (MDO) were performed. The main goal of the refinement is to reduce the aircraft DOC further. Multiple cases were considered. The first MDO featured all prescribed assumptions. The second MDO assumed that no folding penalty is present to estimate the influence of the folding penalty of the aircraft. This case is used only as a comparative study to investigate the folding mechanism effect on the optimal design. Finally, a special case of battery weight minimization was calculated to investigate the reduction of the battery weight and increase of DOC with respect to the aircraft optimized for the DOC. This case also directly influences the aircraft CO2 emission.
Production of electricity also involves emission CO
2 and other greenhouse gases, since modern electricity generation is not a product of renewable energy sources. A major portion of electricity today comes from fossil fuels, consequently, an all-electric aircraft cannot be considered as a zero-emission one. Since the goal of the study was to design and assess the aircraft from the environmental perspective as well as performance and costs, proper metrics of preliminary emission rates must be introduced. Scholz describes a rapid and useful procedure of comparing kerosene-based and battery-electric emission [
59,
60] to calculate the CO
2 emission including additional factors for each energy source. For aircraft operating with kerosine-based fuels, additional chemicals other than CO
2 contribute to the emission level. In addition, the altitude at which the emission happens plays an important role. To account for secondary effects, the equivalent CO
2 emission level per flight can be described by
where
is the fuel flow per km,
is the emission index for each species,
is the characterization factor, and
is the range in km. The
is equal to 3.16 kg CO
2 per kg fuel [
60]. The
is found using the Boeing Method 2 [
61] where the index is computed based on existing data from the ICAO Engine Emissions Databank [
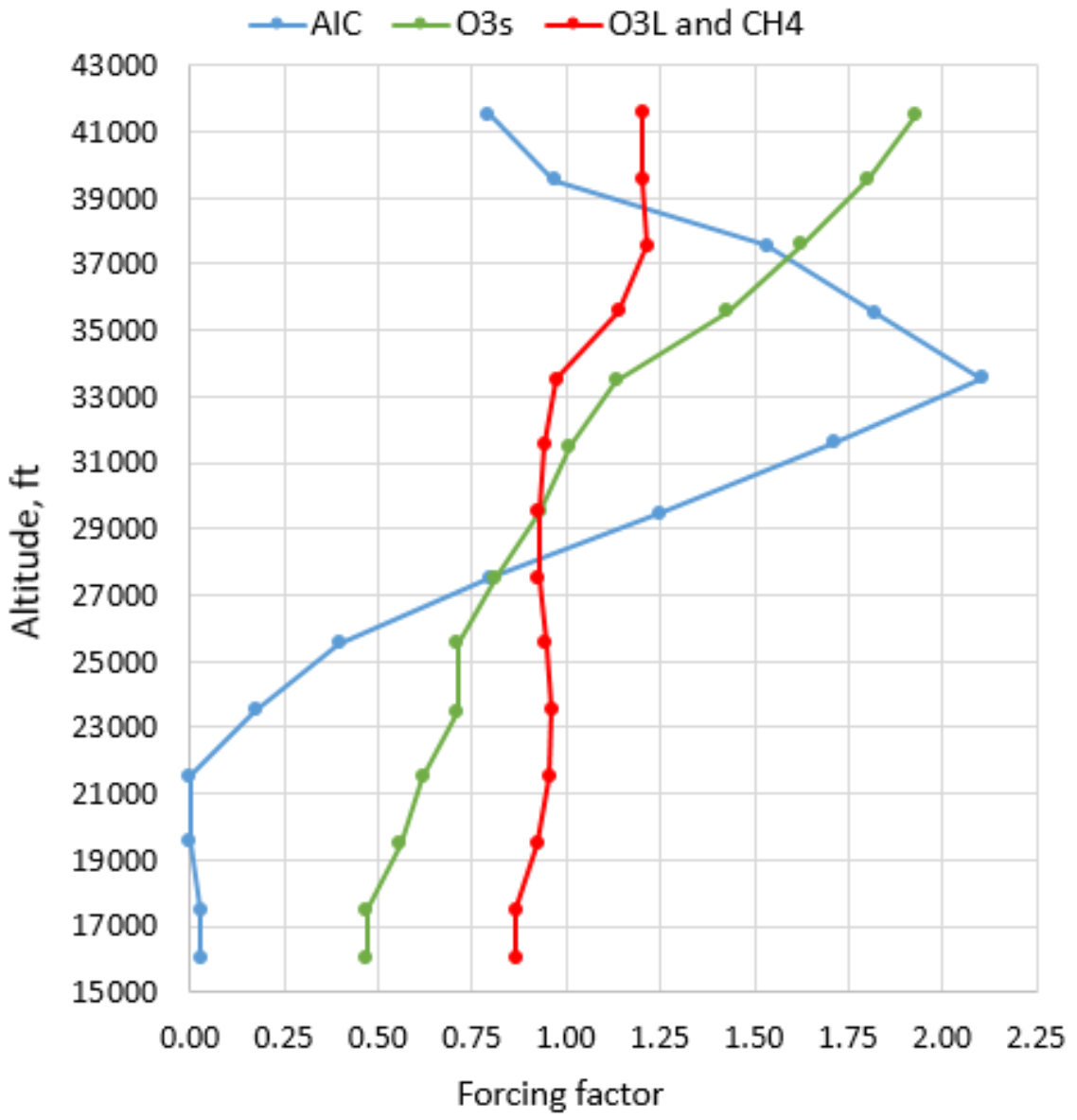
62] and is corrected with respect to the flight altitude. Characterization factors are calculated by
where
is the sustained global temperature potential, summarized in
Table 4 and
s is the forcing factor which depends on the altitude and is shown in
Figure 12 for each species.
The formulation given in Equation (
12) was used for each flight segment of the reference ATR-72 and then added to obtain the total mission equivalent emission level. Segments with variable altitude such as climb and descent used average values of forcing factors
s and emission index
. If the value of the forcing factor was for the altitude lower than the available data, the minimum value represented in the
Figure 12 was used.
Battery emission, on the other hand, depends on the amount of energy used to charge them. The emission then depends on the share of fossil fuel to non-fossil fuel sources participating in the electricity production and the primary efficiency factor—the factor which describes the ratio between the energy required to produce electricity and the final output energy amount. Including all factors described above, the equivalent emission per flight becomes
where
is the fossil fuel share ratio equal to 0.39 according to the forecast of 2050 [
63],
is the primary efficiency factor assumed equal to 2 [
59],
is the battery charging efficiency equal to 0.9 [
59], and
and
are battery and Jet-A fuel energy densities, respectively. From Equation (
15), the CO
2 emission is directly proportional to the battery mass, so the optimization for the minimum battery weight corresponds to the minimum emission case.
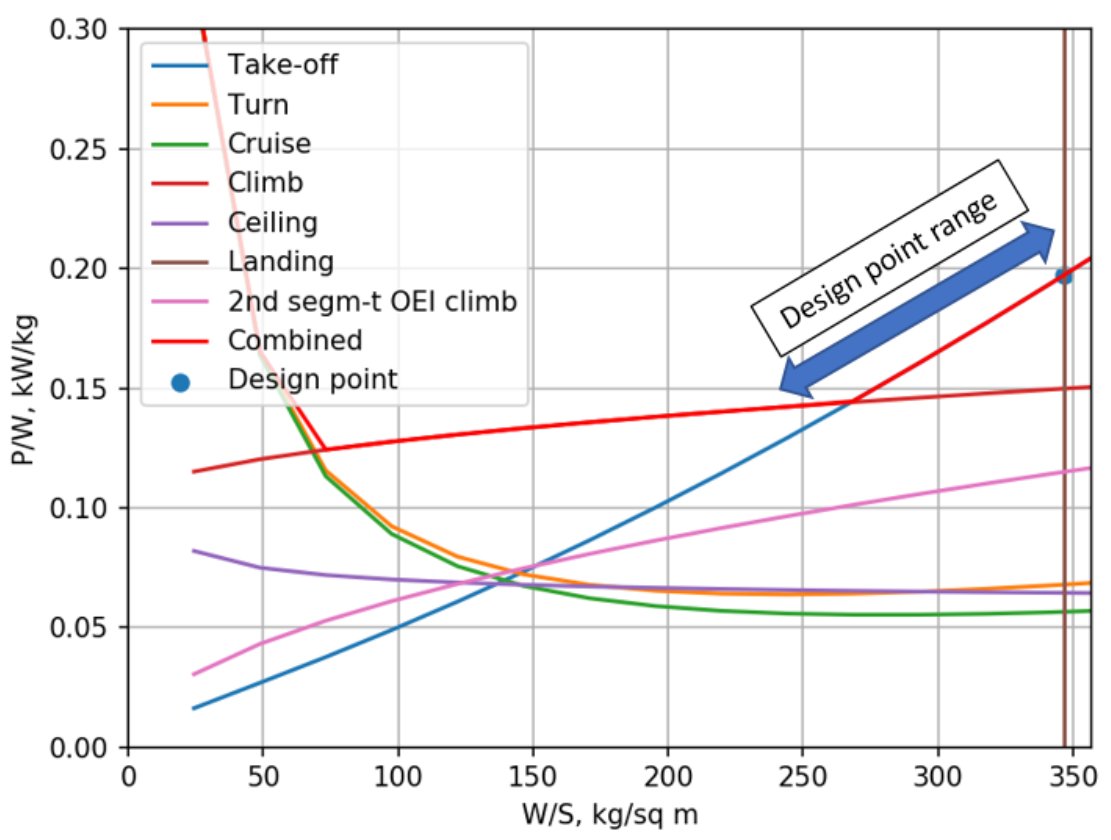
All problems have similar design variables and constraints, as shown in
Table 5. Due to the application of new airframe technologies, requirements for the sea-level climb, take-off, and landing are more significant compared to cruise and OEI requirements, as shown in
Figure 10. Such behavior occurs due to a substantial reduction of the cruise drag, which strongly diminishes the required cruise power. Consequently, optimization problem constraints can be limited to these three main performance metrics. Additional geometric constraints of 51.8 m wingspan (similar to the wingspan of the NASA N+3 strut-braced wing concept [
64]) and the wingtip of no larger than 1.4 m were introduced to limit further increase in the wing slenderness.
Table 5 describes the formulation of the optimization problem. There,
and
are the wing root and tip chords, respectively,
is the wing thickness, and
is the maximum throttle during the flight. To perform the MDO, SUAVE was coupled with MATLAB, and the Genetic algorithm was used to find optimal solutions.
To account for the constraints, the penalty function similar to the one defined in [
65] was used. The penalty function is defined by
where
y is the design variable,
is the design variable constraint,
is the unit step function equal to zero for
, and
. With the introduction of the penalty function, the objective function becomes
where
N is the total number of design variables. Sixty species per generation were set to have sufficient population size without major accuracy losses. Take-off and landing constraints were calculated using physics-based time-dependent performance formulations presented in [
41]. The climb power-to-weight ratio constraint was calculated using a similar formulation used for the constraint analysis.
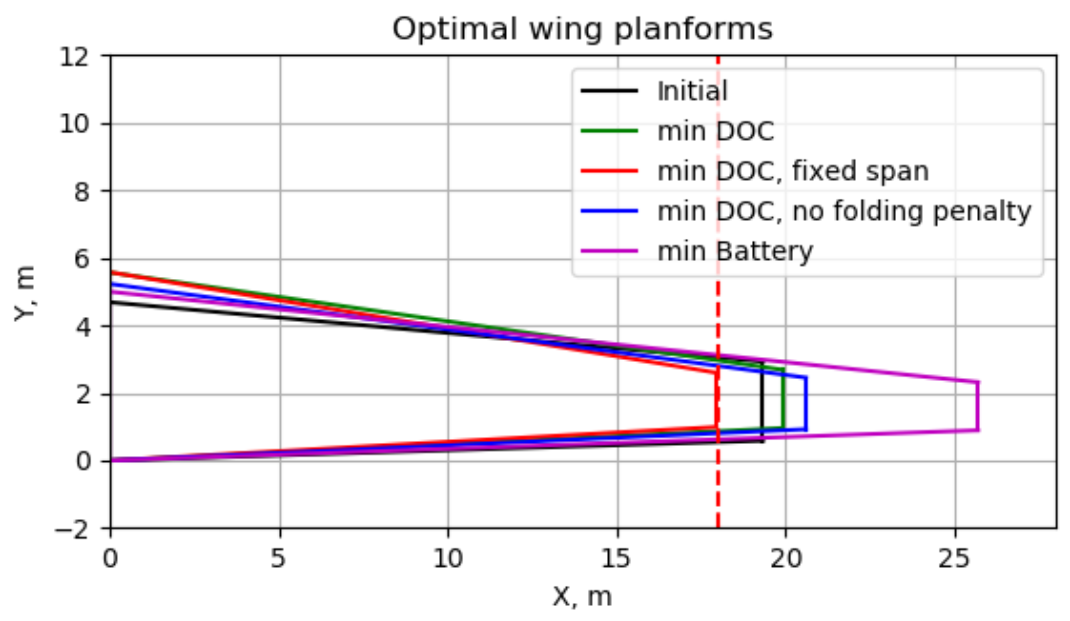
Figure 13 shows the aircraft planforms for each optimization problem and
Table 6 summarizes important properties of each optimized configuration. Limiting constraints for each optimization were similar to the constraint diagram: the solution was trying to minimize the power-to-weight ratio which reached the constraint limit of either the climb or the take-off. In addition, the top-of-climb throttle constraint was an additional constraint which dominated the others.
As shown in
Table 6, the optimized aircraft with all imposed assumptions reduced all weights, slightly reduced the aspect ratio, increased the wingspan, reduced the taper ratio, and reduced the aircraft power-to-weight ratio. Minor differences in the field performance occurred. The DOC for the optimized aircraft reduced by 124 EUR/flight. In addition, the difference in emission between the initial and DOC-optimized designs is equal to 84 kg per flight which is not substantial. If the folding penalty is removed, then the wing has more freedom to increase its span and aspect ratio due to the absence of the folding weight penalty. The optimized aspect ratio increased by 1.23, the wingspan increased by 2.6 m compared to the initial design. However, the power-to-weight ratio increased due to a reduced wing planform area. All weights were further reduced compared to the aircraft configuration with the folding mechanism. The DOC was reduced by 206 EUR/flight compared to the initial configuration, which indicates a relatively strong effect of the folding mechanism on the aircraft. The emission level reduced by 201 kg compared to the initial design which is more substantial. Comparing the DOC optimal solutions with and without the folding mechanism, it becomes evident that wing folding affects the final design and cannot be neglected. If the battery minimization strategy is considered, then the wing planform approaches design limits. Due to a stronger reduction of the battery weight compared to the increase in the wing weight, minor reductions of the MTOM and empty weights are observed. Finally, DOC increased by 235 EUR/flight compared to the initial design or by 359 EUR/flight compared to the optimized configuration. The battery weight reduced by 2404 kg and 1883 kg compared to the initial and DOC-optimized aircraft, respectively. The emission level, however, reduced by 385 kg compared to the initial configuration. In addition, the wing span of the aircraft increases to 51.7 m and the folding portion from each side of the wing becomes 7.85 m. Such a large folding portion may affect the operational convenience at the airport and will make the aircraft taller when the wings are folded. That may create additional difficulties related to the aircraft storage.
If DOC and emission levels are compared against the reference aircraft, the increase in DOC demonstrates a substantial increase compared to the reference ATR-72. The most cost-effective aircraft version has 41% increase in DOC which is a substantial cost growth from the market standpoint. The DOC for the battery-optimal configuration increases by 46%. On the other hand, if emission levels are compared, the most DOC-efficient version has a reduction in equivalent CO2 emission of 83% compared to the ATR-72, and the battery-optimal configuration has 86% emission reduction. From the comparison, the emission level of the all-electric aircraft reduces substantially, but such reduction of the emission comes at a significant cost increase. Moreover, DOC shows more sensitivity with respect to the configuration compared to the emission level. To minimize costs as much as possible, the DOC-optimal configuration was selected for future analyses.
Observing the wingspan deviations from the Part C airport requirements of 36 m, aircraft configurations minimized for DOC did not show major increases in wingspans. Consequently, it is possible to design an aircraft that will have no folding mechanism and will not have a significant DOC penalty so that the wing design complexity may be reduced substantially. An additional MDO study with a fixed wingspan constraint was performed to investigate the sensitivity of DOC to the configuration with a fixed span of 36 m.
Table 7 demonstrates a comparison between the initial design, the optimal design without the span constraint, the optimal aircraft with a constrained span, and a reference ATR-72 to compare optimal models to their reference.
The aircraft with a fixed span has a higher weight due to a restricted planform and, as a consequence, more battery is required for the mission. The battery weight increased by 1600 kg compared to the optimal design without the span constraint. The power-to-weight ratio also increased to satisfy the take-off requirement. However, the wing area is reduced, so it is less expensive to increase the motor power than increase the wing area. The DOC increased by 94 EUR/flight, which is not a large increase. At the same time, the wing has no folding mechanism and is easier to design and maintain. However, the emission level increases by a relatively small margin compared to the initial DOC-optimal configuration. At this moment, the configuration without folding is selected as the final decision.
The geometric summary of the selected aircraft is shown in
Table 8. Single-slotted Fowler flaps were used for this aircraft. The empennage was initially sized within SUAVE using a constant tail volume fraction similar to existing aircraft in the class using data from Raymer [
40] and then refined using AVL to ensure sufficient stability and trim during critical flight cases for the complete CG envelope obtained separately. The vertical tail was sized based both on the one-engine inoperative (OEI) case and the lateral stability condition of
[
66]. The propeller was positioned vertically as far as possible to reduce the possibility of the wing wake impinging on the propeller blades. The angle between the wing trailing edge and the propeller’s lowest blade tip is equal to 14 deg, which should be sufficient for the majority of operational cases. The propeller features six blades and has a diameter of 3.56 m.
The CG envelope was created using available information about the stick-fixed and stick-free neutral points, payload clouds, and multiple baggage arrangement cases. The CG-range is equal to 21.5% mean aerodynamic chord (MAC) starting at 12% and ending at 33.5% MAC.
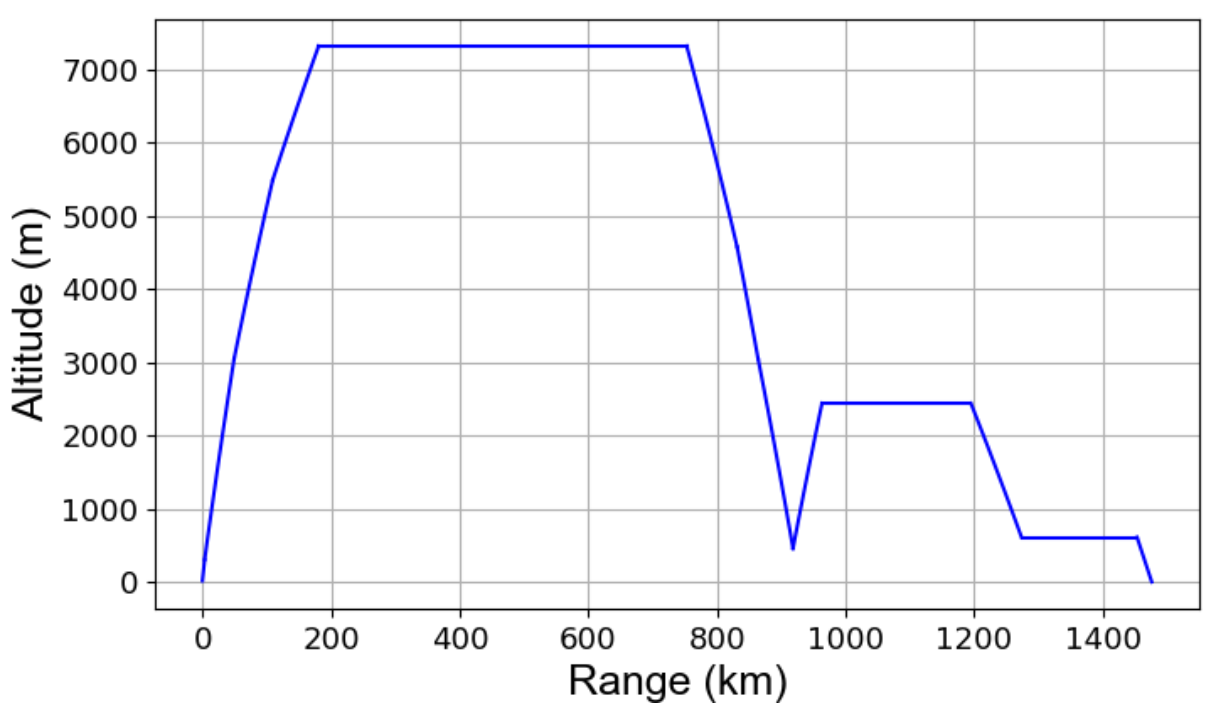
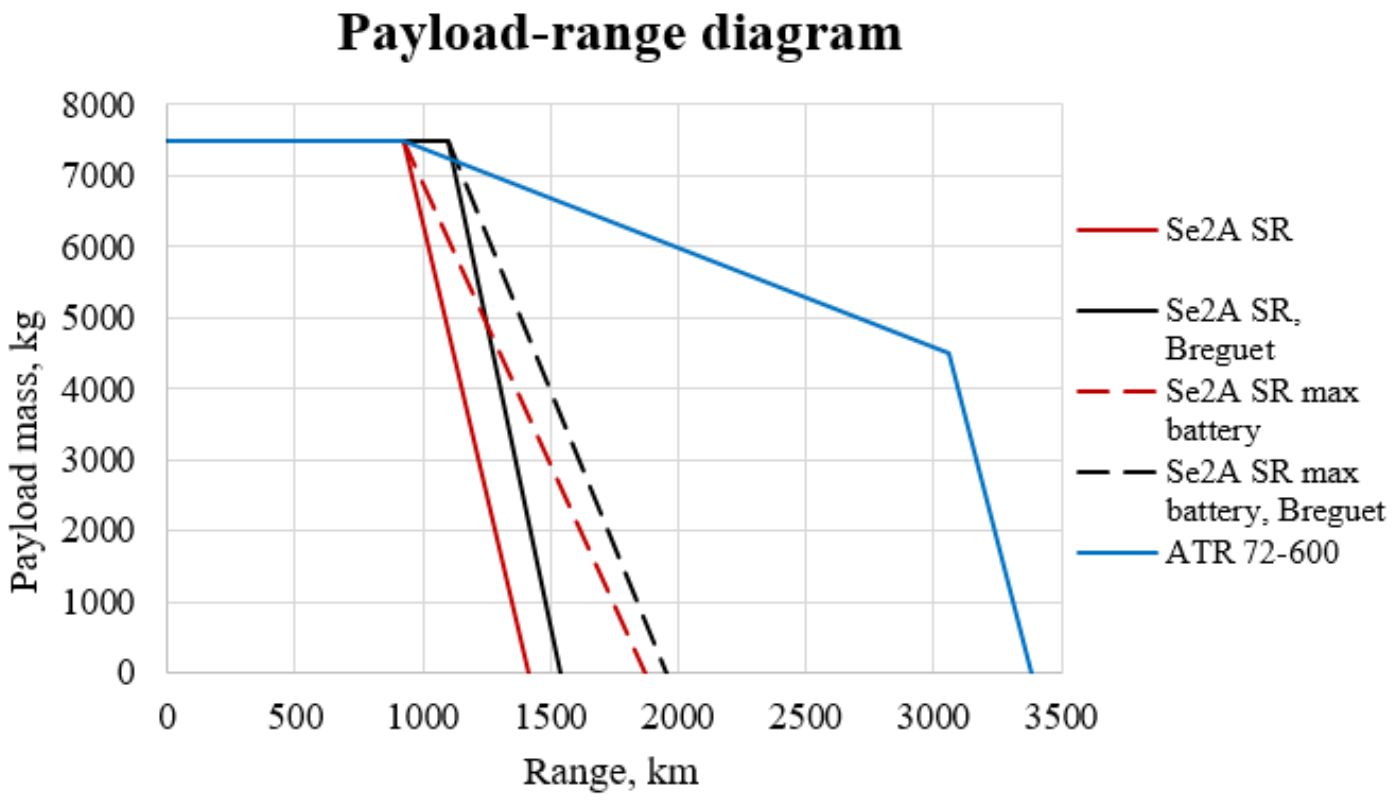
Figure 14 shows the SE
2A SR payload-range diagram compared to the reference ATR-72 [
67]. In addition, the obtained payload-range diagram was validated using a Breguet range equation for an all-electric aircraft defined by
where
is the maximum take-off mass,
g is the gravitational acceleration, and
is the cruise lift-to-drag ratio.
For the range analysis, multiple options were considered. The first option is the case when the battery mass remains constant, independent of changes in payload weight. This way, the battery volume is fixed and equal to the one used for the maximum passenger case. The second option is to have sufficient battery volume to replace missing passengers with an extra battery. Such an option is more problematic to achieve due to the increased battery size and additional growth of the already large belly fairing but is useful to analyze for the range sensitivity analysis. The comparison shows that although the SE2A SR satisfies the harmonic range requirement, which matches the ATR-72, the ferry range is significantly limited due to the battery energy density and weight limitations. The absence of the payload extends the aircraft range to 1415 km, which is substantially smaller than the ATR-72 with its ferry range of 3380 km. Introduction of more battery which replaces the payload increases the ferry range until 1870 km, which is 455 km longer than the fixed battery weight case. However, this ferry range still does not introduce major range improvements compared to the ATR-72. Comparison between the SUAVE payload-range and Breguet payload-range diagrams show a difference of both harmonic and ferry ranges of 100 km. Such tendency happens due to the higher fidelity of SUAVE which includes all mission segments and calculates incremental energy consumption and aerodynamic characteristics, unlike the Breguet equation which considers a constant lift-to-drag ratio. On the other hand, minor deviations are expected and are satisfactory for the selected analysis.
To summarize current design outcomes, an all-electric SE2A SR aircraft is capable of achieving the harmonic range similar to the reference ATR-72 and satisfies all prescribed TLRs. Moreover, its emission level is reduced by 81% compared to the reference aircraft. On the other hand, the ferry range of the all-electric aircraft is limited to no more than 1870 km compared to 3380 km for the ATR-72 and has a 42% increase in DOC with respect to the reference which will create substantial market application problems for this type of airplane.
Figure 15 shows a rendered image of the optimized SE
2A SR aircraft.
7. Sensitivity Analysis of the Aircraft Characteristics to Technology Advancements
After performing a conceptual design of a regional all-electric aircraft and analyzing obtained results, several questions still remain: What is the influence of novel technologies on the aircraft configuration? How much do the deviations of novel technology assumptions affect the airplane configuration? What technologies affect the aircraft geometry the most?
A sensitivity analysis of the SE
2A SR aircraft to the battery energy density with the absence of all novel airframe technologies was performed to determine what potential energy density could make all-electric regional aviation possible and how the aircraft characteristics are affected. The aircraft without novel airframe technologies assumed 5% laminar flow on the wing and empennage, 5% laminar flow for the fuselage, a limit load factor of 2.5, and no weight reduction due to composite materials. Technologies related to the propulsion system such as HTS motors remained since their absence immediately leads to the aircraft’s infeasibility due to the Megawatt-level power required per motor. Furthermore, the performance characteristics of the aircraft without novel technologies were compared against the case if all technologies met the desired requirements. The sizing procedure for all configurations was performed for a similar mission profile and used similar methods to those described in
Section 3 to ensure the satisfaction of all TLRs. Similar constraints based on TLRs were also implemented. As for the initial sizing, wing loading and aspect ratio sensitivity analyses were performed to determine a sweep of all possible aircraft that satisfy TLRs. For all possible configurations, the ones with minimum DOC were selected for each selected battery energy density. Finally, all characteristics were compared against the reference ATR-72 aircraft.
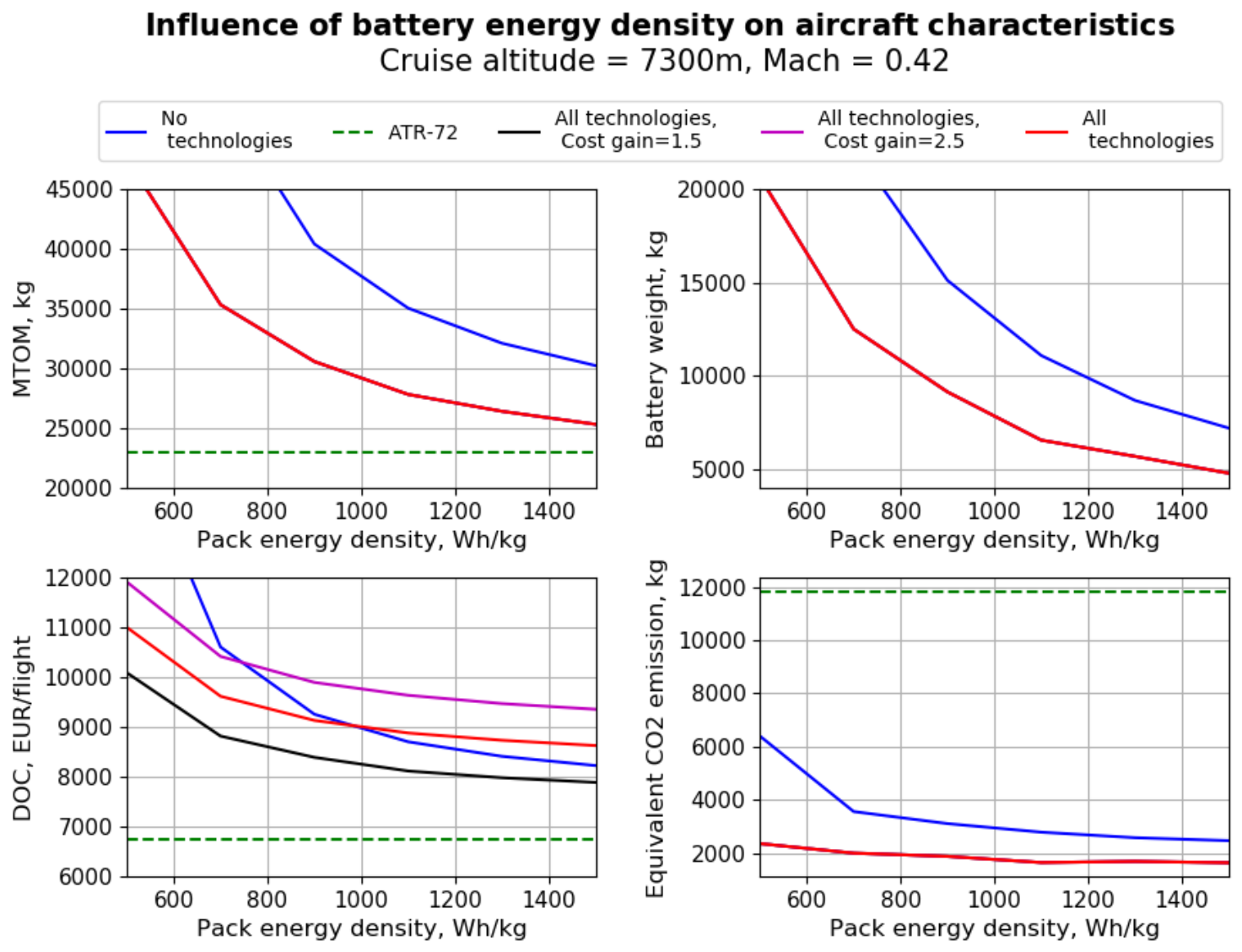
Figure 16 shows the effect of battery energy density on the aircraft gross weight.
Results demonstrate that the absence of novel technologies significantly limits the feasibility of all-electric regional aviation unless substantially higher battery cell energy densities are reached. For instance, if the aircraft with all available airframe technologies can reach the MTOM of 40,000 kg at the pack energy density of 600 Wh/kg, the aircraft without airframe technologies can reach similar weights at 900 Wh/kg. In addition, weights approach an asymptotic value at high energy densities, so the effect of airframe technologies becomes more significant for high energy densities. For instance, if the pack energy density reaches 1000 Wh/kg, then the aircraft MTOW with all technologies becomes slightly less than 30,000 kg while similar weight is achieved by the aircraft without airframe technologies only at 1500 Wh/kg.
To compare the DOC values, the aircraft without technologies did not include an additional maintenance cost penalty introduced for the aircraft with all airframe technologies. Moreover, a sensitivity analysis of the maintenance cost gain factor was performed to investigate its effect on the overall DOC and predict potential future DOC behavior. If DOC is compared, two trends can be observed. First, both aircraft have substantially higher DOC compared to the reference ATR-72, and the difference remains large even for high energy densities. On the other hand, the application of technologies affects the DOC. Comparing aircraft with and without technologies, there exists a point after which the DOC increases due to the airframe technologies and their maintenance complications and is equal to 980 Wh/kg. After this energy density, an aircraft without airframe technologies becomes cheaper to operate. Such a trend is a consequence of the maintenance cost gain and redistribution of dominant cost drivers, as shown in
Table 9. For low battery energy densities, the most dominant DOC component is the capital cost which depends on the airframe and propulsion system weights. Due to significantly larger weights, these costs contribute to total DOC such that benefits of maintenance costs disappear. Moreover, more battery energy is required for the aircraft without technologies and slightly higher fees also contribute to a larger total DOC. On the other hand, with the increase in energy density, aircraft weights reduce substantially, so capital costs reduce as well. The overall distribution of costs becomes more evenly distributed for the aircraft without technologies, so lower maintenance cost effects become more significant. On the other hand, maintenance costs for the aircraft with technologies start dominating. That relationship leads to higher overall DOC for the aircraft with technologies at high battery energy densities. The present aircraft was designed having 700 Wh/kg of pack energy density which is still more beneficial than the aircraft without technologies. However, the maintenance penalty factor of 2 may be too optimistic. If the maintenance costs increase more, then the equilibrium point between the two DOCs will shift towards lower energy densities, as shown in
Figure 16. The only possibility of approaching the reference aircraft DOC exists if maintenance cost gain is equal to 1. The maintenance cost of novel airframe technologies shall be considered later to ensure the financial applicability of novel technologies further.
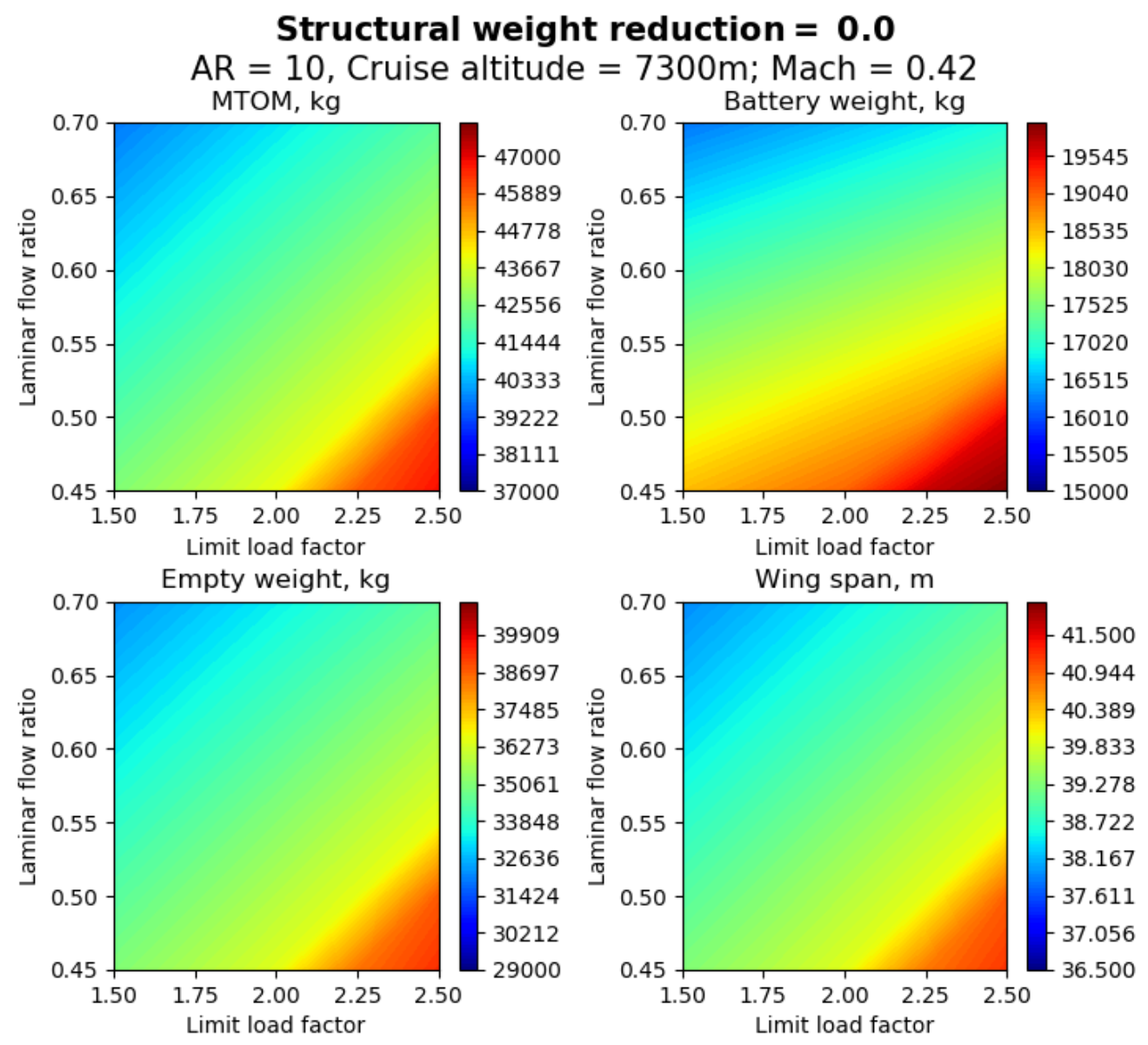
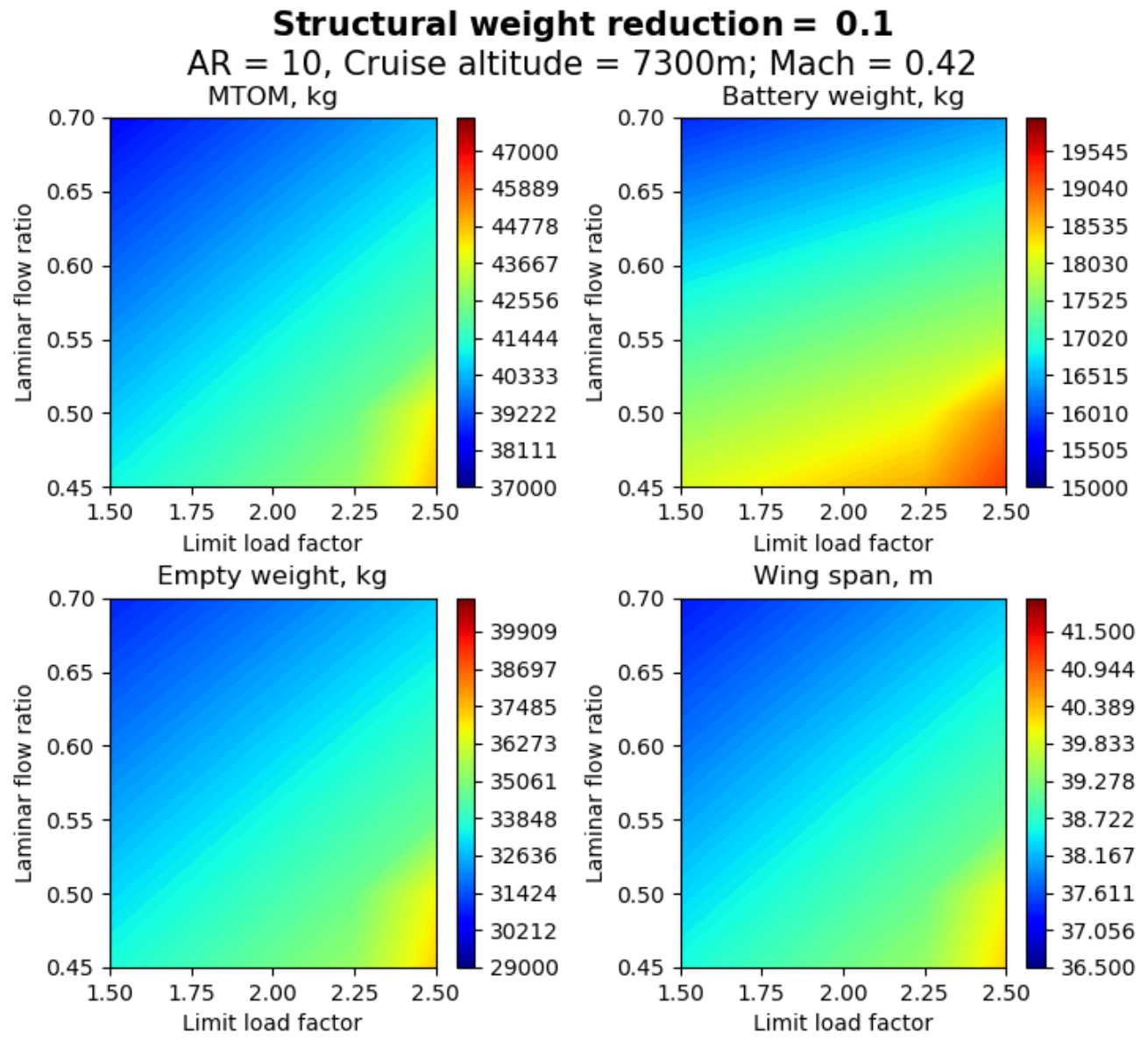
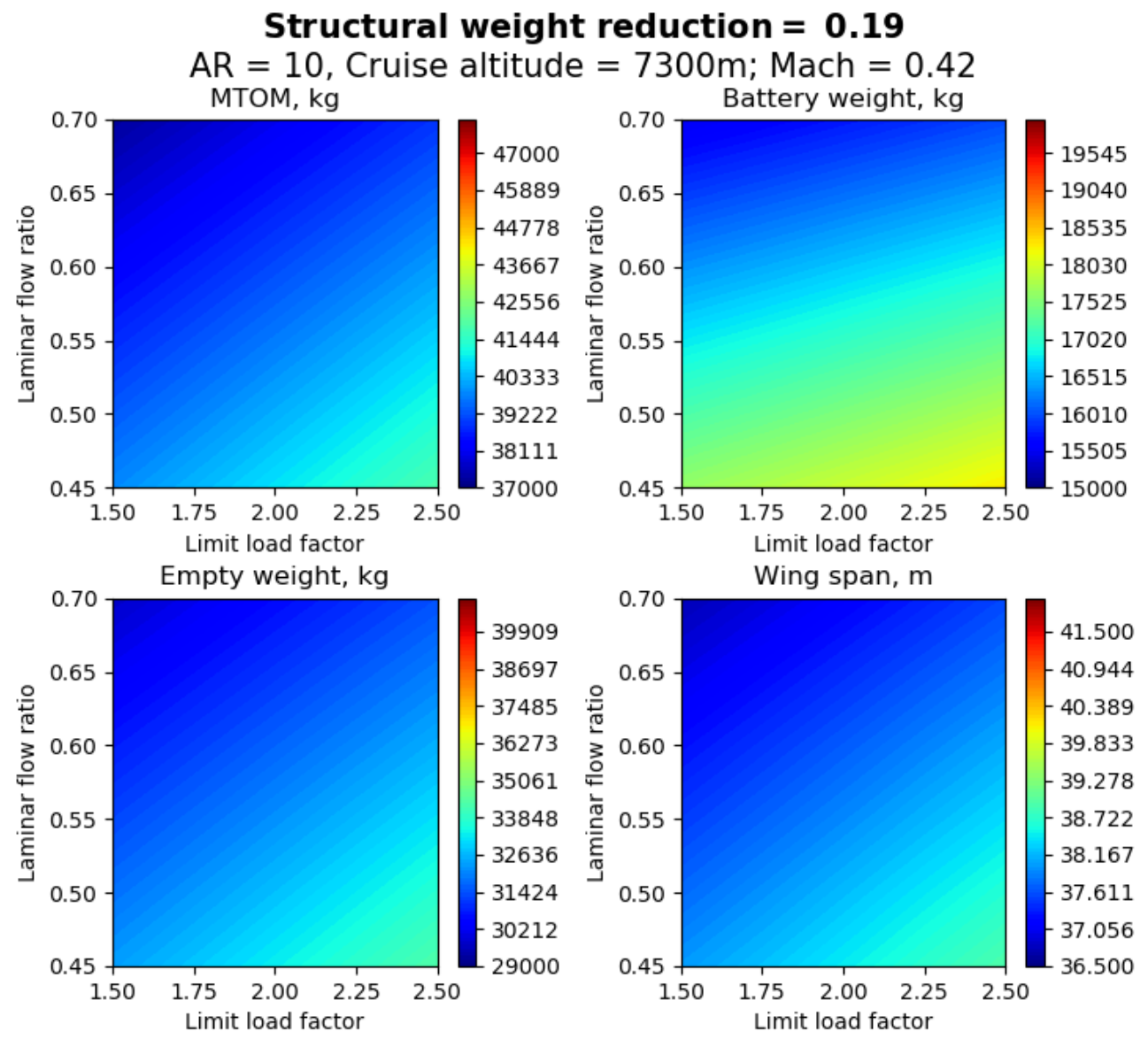
The effect of technology deviations on the aircraft weights and, as a consequence, applicability of all-electric aircraft is shown in
Figure 17,
Figure 18 and
Figure 19. In addition, points for extreme technology cases are summarized in
Table 10,
Table 11,
Table 12 and
Table 13. A similar sizing approach, as discussed in
Section 3, was used for the sizing with technology deviations. The wing loading, however, was fixed to the one that occurred after the MDO of the aircraft. In addition, to simplify the sensitivity and account for significant complexities to design an appropriate suction system for the fuselage, the fuselage was assumed fully turbulent for all technology sensitivities.
Based on obtained results, if the weight sensitivity on the technology is compared for two other technologies where one technology has a constant value and the other technology is fixed at either their minimum or maximum, the laminar flow control shows the largest influence on the MTOM. Structural weight reduction plays the second most important role, and the load alleviation affects the aircraft MTOM the least compared to the other two technologies. For instance, for the airframe reduction of 0%, if the maximum possible boundary layer transition is possible, then the change in MTOW due to the load alleviation is equal to 2435 kg. However, if for the same airframe reduction factor, the load alleviation has its minimum value, then the change in MTOM is equal to 2835 kg due to the HLFC technology. If technologies are combined, then the effect of the MTOM is magnified.
8. Conclusions
The present manuscript investigated the influence of novel technologies on the feasibility of all-electric short-range aircraft with passenger capacity and performance characteristics similar to ATR-72. Three novel airframe technologies were considered: hybrid laminar flow control, active load alleviation, and advanced materials and structure concepts. In addition, superconducting electric motors and high energy density batteries were considered for the aircraft energy system.
Multiple tools were used and improved to assess the feasibility question. SUAVE was used to perform the initial sizing and sensitivity analyses and was also coupled with MATLAB to perform MDO studies. EMWET and FLOPS weight estimation methods and a weight penalty function for folding wings were integrated into SUAVE. The cubic spline method for a propeller was used to enable the aircraft sizing. AVL was used to assess the aircraft stability and control.
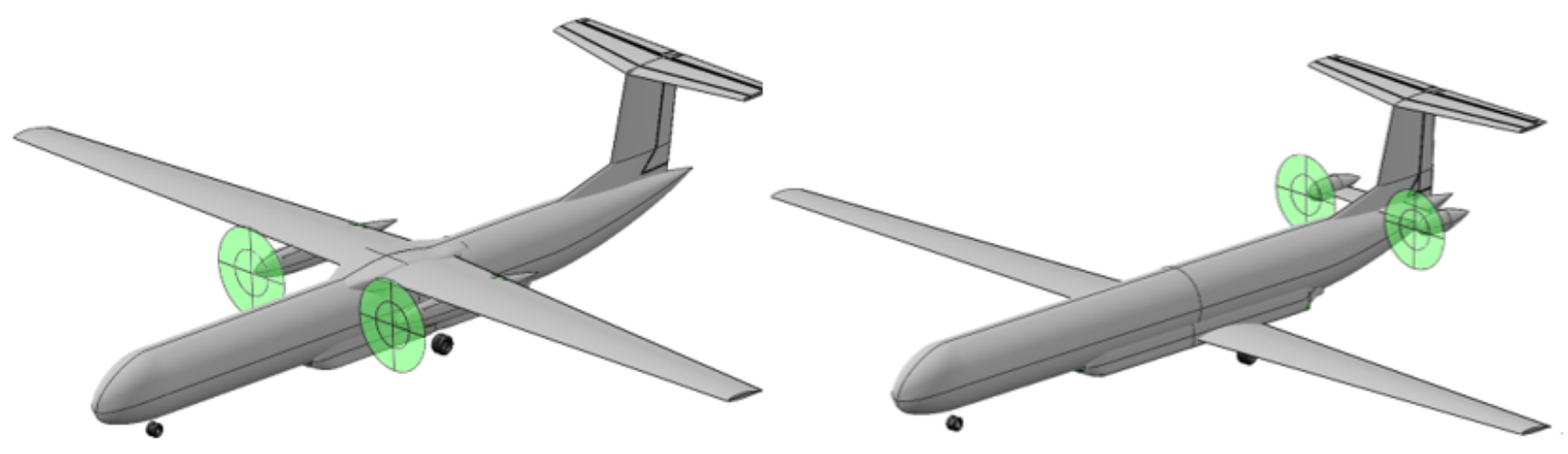
Two aircraft configurations were considered for the design: the conventional configuration with a high wing and wing-mounted propellers and the low wing with propellers mounted at the aft of the fuselage. The low-wing configuration was selected because it had lower DOC, lower weights, and is possible to have certifiable stability and control characteristics.
To refine the selected concept and determine the aircraft characteristics’ sensitivity to the folding penalty and the objective function, a set of MDO studies were performed. The configuration without folding wings was selected due to a relatively small increase in DOC due to the fixed wingspan and reduced complexity of the wing design and maintenance due to the absence of the wing folding mechanism.
The importance of airframe technologies was assessed by comparing aircraft configurations with and without them. The presence of airframe technologies may reduce the required battery pack energy density by 300 Wh/kg compared to their absence. The difference in required energy density also increases with the increase of the battery energy density. However, the application of technologies becomes more expensive than their absence if the battery pack energy density exceeds 980 Wh/kg for a given maintenance cost gain factor of 2.
Comparison of the all-electric aircraft to the reference ATR-72 showed substantial reduction of CO2 emission by 81% of the all-electric aircraft. On the other hand, DOC increase of 42% presents a significant limit to market success of such aircraft. Moreover, neither increase in battery energy density, nor reduction of maintenance costs change aircraft DOC significantly. The only possibility to have a comparable DOC level may appear if maintenance cost gain is absent and battery pack energy density exceeds 1000 Wh/kg. Moreover, the all-electric aircraft consumes a lot of energy to complete the mission which creates major uncertainties related to its energy-efficiency from the operational standpoint.
Finally, a sensitivity analysis of technology availability on the aircraft characteristics was performed. Simulations were performed for each technology combination from the most optimistic to its absence. Results demonstrated high sensitivity of aircraft weights to technology levels where the HLFC has the most influence, followed by the aircraft weight reduction and finishing with the load alleviation. The combined effect of technologies magnifies the differences in weight even further.
Future research steps will include a detailed conceptual design of the SE2A SR aircraft. First of all, the design with available models for the laminar flow required power and additional weight penalties due to the implementation of all technologies and additional hardware will be performed. A more sophisticated assessment of the aircraft stability and control must be performed to ensure adequate flying qualities. Finally, higher fidelity analysis for the energy network and modeling of the motors and propellers will be considered.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}