1. Introduction
Fixed-wing unmanned aerial vehicles (UAVs) are widely used in geological mapping, resource surveys, environmental monitoring, meteorological observations, and other fields because of their long flight ranges, large cruising areas, fast flight speeds, and high flight altitudes [
1]. However, most UAVs in daily life do not consider fault diagnosis or fault-tolerant control, even if simple fault detection and recovery strategies are applied. These simple strategies cannot effectively ensure the flight safety of UAVs [
2]. Fixed-wing UAVs often perform long-term tasks through remote control in poor working environments [
3]. In doing so, they are affected by various types of interference and damage, which lead to different faults for these vehicles, such as voltage control faults, actuator lock-in-place physical aging, structural damage, leakage, and fatigue. These faults inevitably affect the performance of UAVs [
4]. Therefore, the reliability, stability, and safety of fixed-wing UAV flight are extremely important. Consequently, fault detection of actuators for fixed-wing aircraft has important practical significance and has drawn considerable research attention in recent years [
5,
6].
In fault detection, abrupt faults have received extensive attention; however, incipient faults have often been ignored [
7]. In particular, the incipient faults caused by wear and tear in the mechanical structures of actuators have not been studied thoroughly. If incipient faults are not detected and warnings are not issued in time, these faults may expand and lead to catastrophic consequences [
7,
8]. Actuator jamming, voltage control faults, structural damage, and other abrupt faults have obvious effects on system performance. Because these abrupt faults are clearly different from disturbances, appropriate thresholds can be selected to detect abrupt faults [
9]. Traditional observers, such as unknown input observers, Luenberger observers, and sliding-mode observers (SMOs), can deal with these faults effectively. In a previous study, a sliding-mode control assignment scheme with linear variable parameters was devised for actuator faults. When an actuator fails, the sliding mode first starts and then redistributes control signals to other actuators [
10]. Traditional Luenberger observers and SMOs have been designed to manage system uncertainties and abrupt actuator faults [
11]. A neural network sliding-mode observer has been designed for the fault detection and estimation of actuators [
12]. In linear time-delay systems, adaptive observers are used to detect abrupt actuator faults, and this method can be applied to nonlinear systems [
13]. In the case of system interference, extended state observer (ESO) approaches have been devised to detect actuator faults [
14]. In the last decade, almost all methods have assumed that the original system is linear, and they have mainly dealt with obvious and serious faults. For the situation in which the system described by the Takagi–Sugeno fuzzy method has a time delay and external disturbance, a fuzzy description learning observer was proposed to realize the simultaneous reconstruction of the system state and an abrupt actuator fault [
9,
10,
11,
12,
13,
14,
15]. Higher-order sliding-mode unknown input observers have been proposed to detect abrupt actuator faults and provide the necessary analytical redundancy [
16,
17]. SMOs are designed to realize the simultaneous detection of actuator faults and sensor faults when the hypothesis is established, whereas an adaptive observer was designed to estimate the sensor faults after the assumptions had been properly relaxed [
18]. However, the various methods mentioned above are aimed at abrupt actuator faults. Therefore, it is necessary to detect incipient faults to maintain system stability, which was the inspiration for the present study. In this study, a new adaptive SMO was designed to detect and reconstruct incipient actuator faults.
An incipient fault is a fault that has little impact on the system in the initial stage and can hardly be detected [
19]. However, it can grow slowly over time and has a serious impact on the system. Because the effects of faults on the system can be reflected by the symptoms caused by faults, the symptoms caused by faults are divided into significant symptoms and minor symptoms [
7,
8,
20,
21]. Incipient faults almost develop gradually in the process of low speed and low frequency, and can hardly be detected in the early stage, which is easy to be covered by the changes of a time-varying process [
19,
20,
21,
22]. The term “incipient fault” has two meanings: one refers to the incipient stages of other faults, and the other refers to minor or potential faults that have no obvious symptoms. Timely and effective monitoring of small faults with only minor abnormal signs that may endanger the safe operation of the system is often called incipient fault diagnosis [
22]. Generally speaking, according to the time performance of faults, they can be divided into three categories: incipient fault, sudden fault, and intermittent fault [
23]. In addition, according to the location of the fault, it can be divided into actuator fault, process fault, and sensor fault. UAVs are often affected by noise, airflow interference, and vibration signals. Regardless of the number of faults or their severity, they start as incipient faults. Because these incipient faults are difficult to find in the initial stage, there have been not a lot of convincing or effective attempts at incipient fault diagnosis in academia. However, incipient faults can cause serious problems, although they develop slowly and are tolerable when they first appear. It seems that it is necessary to detect incipient faults to maintain system stability [
23]. UAVs are often affected by noise, airflow interference, and vibration signals. Therefore, it is very difficult to detect and reconstruct incipient faults with disturbances, which was the starting point of this study.
In the past decade, several studies have been conducted on incipient fault detection. Because adaptive fault-tolerant control can reduce the effects of initial faults, a scheme for constructing an unknown input observer was proposed [
24]. An incipient fault detection method based on SMO was also presented, which considers physical structure aging [
25]. Further, an incipient fault detection method based on neural networks was proposed for a class of nonlinear systems [
23]. Inspired by the closed-loop fault diagnosis method [
26], an incipient fault detection and estimation method for high-speed trains was introduced [
27]. The designs of an SMO and a Luenberger observer for incipient fault detection were described. Under certain conditions, the original system was converted into two subsystems via decoupling. The Luenberger observer was designed for one subsystem with no disturbance, whereas the SMO was designed for the other subsystem with disturbance to ensure the sensitivity of the entire system to the incipient fault. In this scheme, the system residuals were only sensitive to incipient faults; therefore, they could detect faults in a manipulator system [
14].
However, the research on incipient fault detection of actuators for fixed-wing UAVs is limited at present. The incipient fault characteristics of such actuators are not obvious, and fixed-wing UAVs are out of the direct control of humans; in addition, their high flight speeds and complex working environments make it difficult to detect incipient faults. Inspired by the previous literature [
7,
14], this report proposes a correlative robust adaptive SMO to detect and reconstruct incipient actuator faults. By considering the advantages of the combination of an adaptive observer and SMO, the robust detection of incipient faults can be realized, which solves the problem that the previous method [
14] cannot reconstruct such actuator faults. This feature represents an innovation of the present study. The main contributions are as follows: First, a nonsingular transformation matrix was designed to decouple an original system with incipient faults and disturbances, and a Luenberger observer and SMO were designed for the decoupled system. The concept of equivalent output injection was introduced into the SMO to estimate the influence of uncertainty on the system. Second, a residual evaluation function was derived for residual evaluation and threshold judgment. Third, based on the uncertainty and unstructured system, an adaptive rate was designed, and the concept of equivalent output error was incorporated to realize actuator fault reconstruction. Finally, the design problem of the adaptive SMO was expressed as a set of linear constraints, which were transformed by the Schur lemma many times and solved by the linear matrix inequality (LMI) technique.
The remainder of this paper is organized as follows:
Section 2 describes the mathematical model of a fixed-wing aircraft.
Section 3 introduces the robust fault detection and fault reconstruction method of the actuator fault for the system model, proves the stability of the proposed method using Lyapunov analysis, and discusses the accessibility of the designed sliding surface.
Section 4 describes some simulation conditions and presents and discusses the mature aircraft model simulations performed in this study. Finally,
Section 5 summarizes the conclusions and topics for future work.
2. Problem Formulation
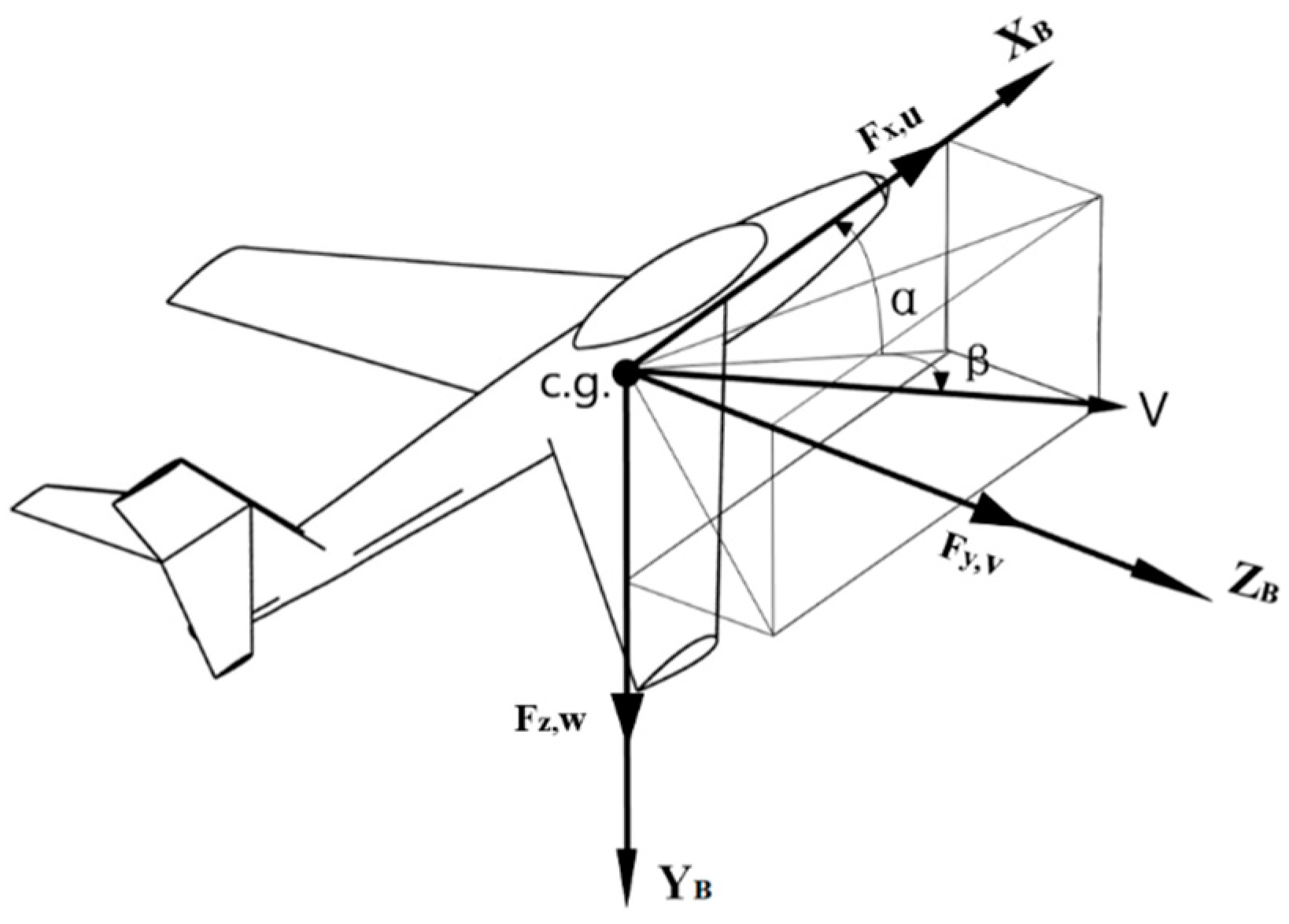
When a fixed-wing aircraft flies in the atmosphere at a high speed, aerodynamic forces and aerodynamic moments are generated owing to the interaction with the air. In addition, under the action of these aerodynamic forces and aerodynamic moments, the gravity and thrust of the aircraft cause elastic deformation of the fuselage, leading to changes in the aerodynamic characteristics of the aircraft. The elastic deformation increases the difficulty of aircraft space motion and flight control technology research. In addition, the mass of the aircraft will change during flight, and the inherent properties of the earth itself will affect the nonlinear and complex relationships among the aircraft aerodynamics, aircraft shape, and flight parameters [
28]. For the convenience of this study, the following reasonable assumptions were made.
A fixed-wing aircraft is a complex multi-input multioutput system. By using the six-degree-of-freedom kinematic equation of three centroid motions and three angular motions, the motion state of the aircraft at any moment can be solved. Based on the definitions of the relevant parameters and aircraft coordinates, the aircraft motion is defined by the dynamic equation and motion equation [
28]. The equation of state of the aircraft is obtained through many derivations and calculations, including the force, kinematic, moment, and navigation equations presented in (1), (2), (3), and (4), respectively.
Figure 1 provides a schematic diagram of the aircraft parameters, and
Table 1 lists the respective parameter definitions.
Here,
is the state vector and
is the control vector.
Table A1 (see
Appendix A) lists the specific meanings of the aircraft parameters, and
Table A2 (see
Appendix A) presents the parameter definitions for the dynamic mathematical model. In
Table A2, the dimensional derivative parameters of the aircraft can be consulted, and the specific values of these parameters are given in the simulation section. For an aircraft with an actuator fault, the dynamic mathematical models of the longitudinal and lateral directions can be described as follows:
In this study, the system satisfied the Lipschitz condition. Under the simultaneous influence of the nonlinear term and system disturbance, the system differential equation can be expressed as follows:
where
,
, and
are the system state, input vector, and output vector, respectively, and
,
,
, and
are known matrices. The pair
is observable.
and
are the known constant matrix with full rank, respectively;
is the known nonlinear continuous term;
is the actuator fault; and
represents the lumped uncertainties and disturbances experienced by the system.
Assumption 1. The known nonlinear term, , satisfies the Lipschitz condition in , and is the known Lipschitz constant. Assumption 2. satisfies the following constraints: Assumption 3. .
Under the previous assumptions, two nonsingular matrices can be found to decouple the system. After applying transformation matrices, system (6) can be changed into the following two subsystems:
where
and
are the nonsingular matrices.
,
,
,
,
,
,
,
,
,
,
;
,
;
,
,
.
The matrix transformations in (9) and (10) are formulated as follows [
29]:
Remark 1. System (9) has both actuator faults and unknown disturbances , whereas (10) only includes actuator faults without unknown disturbances . The system can be decoupled through such transformations.
4. Simulation Results
This section may be divided by subheadings. It should provide a concise and precise description of the experimental results, their interpretation, and the experimental conclusions that can be drawn.
As shown in
Figure 3, a De Havilland DHC-2 “Beaver” aircraft with Air Canada number 1244 was used as the simulation object to verify the overall performance of the proposed adaptive fault detection and fault reconstruction method [
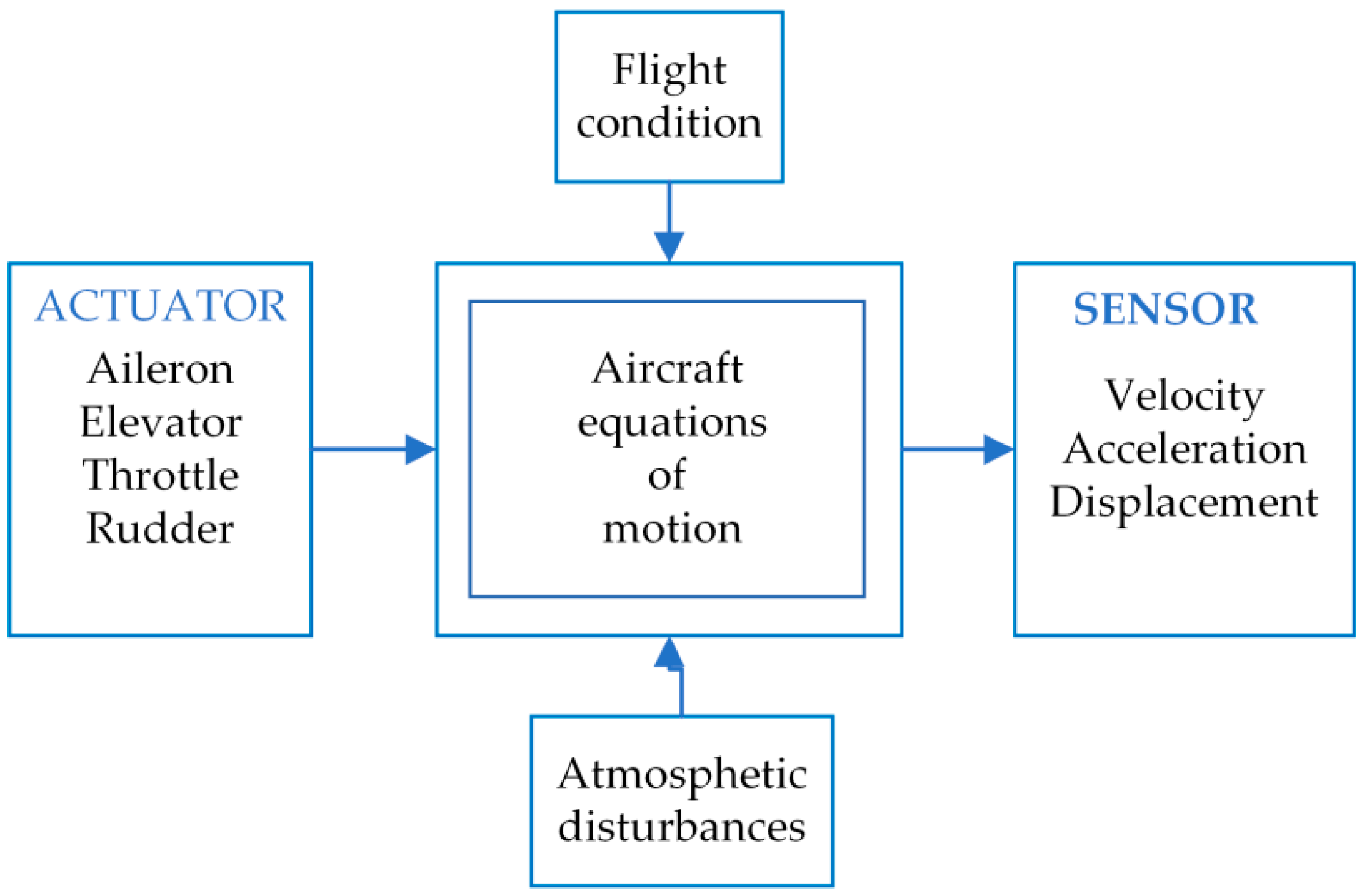
38]. Fixed-wing aircraft have been extensively studied from flight control design to fault reconstruction. Under certain flight conditions and disturbances, the control response relation of the aircraft motion equation includes the actuator of the input unit and the sensor of the output unit. Thus, the importance of actuator fault diagnosis and reconstruction is critical.
Figure 4 shows the basic control–response relationship for “Beaver”, and
Table 4 lists the relevant parameter values.
The dimensional derivative parameters of the aircraft are as follows:
,
,
,
,
,
,
, and
. Using this model, the correlation coefficient matrix was calculated to be
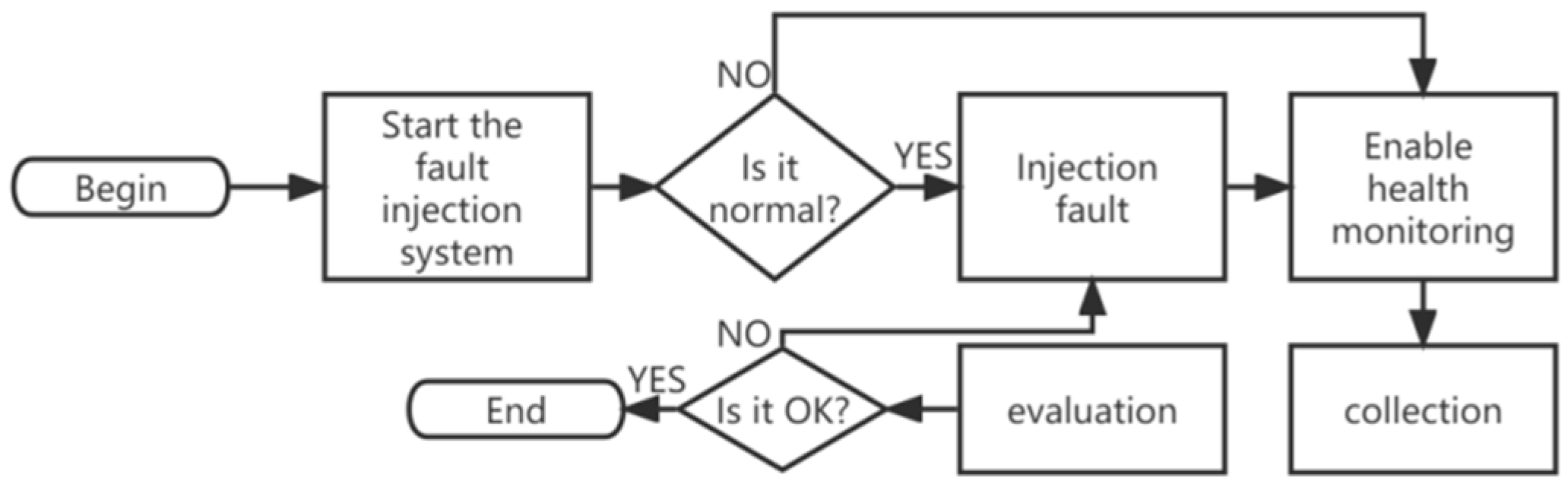
After selecting the faults to be injected from the failure mode library, the fault injection experiment is started. The experimental procedure is as shown in
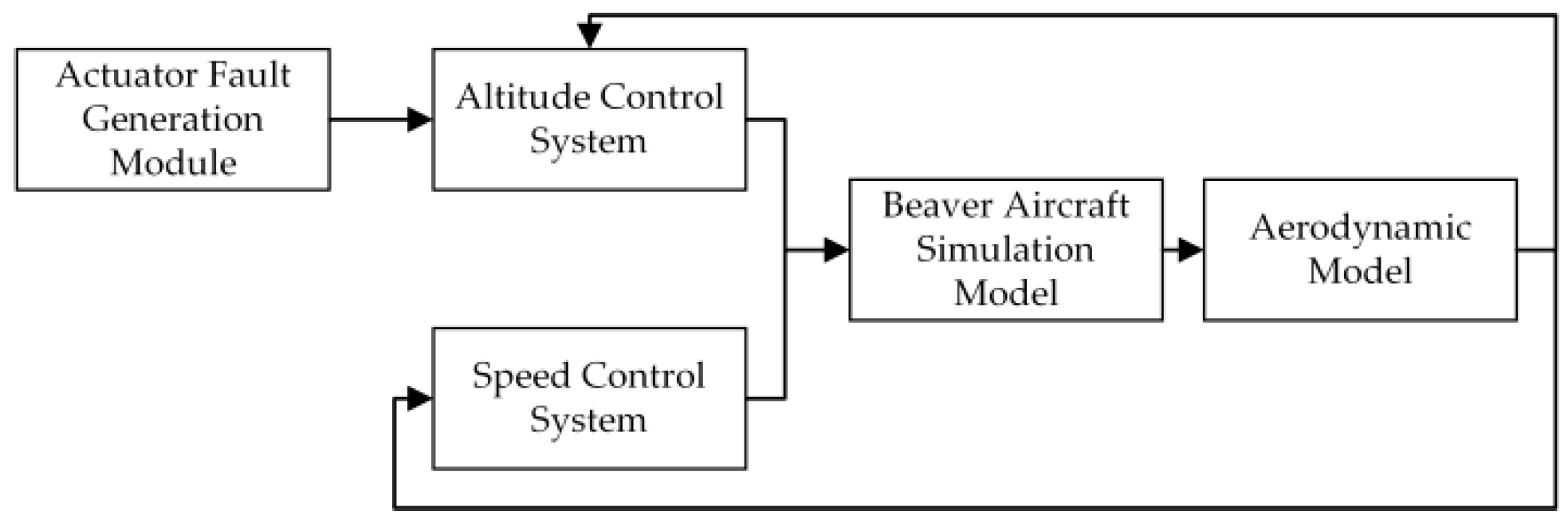
Figure 5. To simulate faults, a flight control simulation model was designed, as shown in
Figure 6.
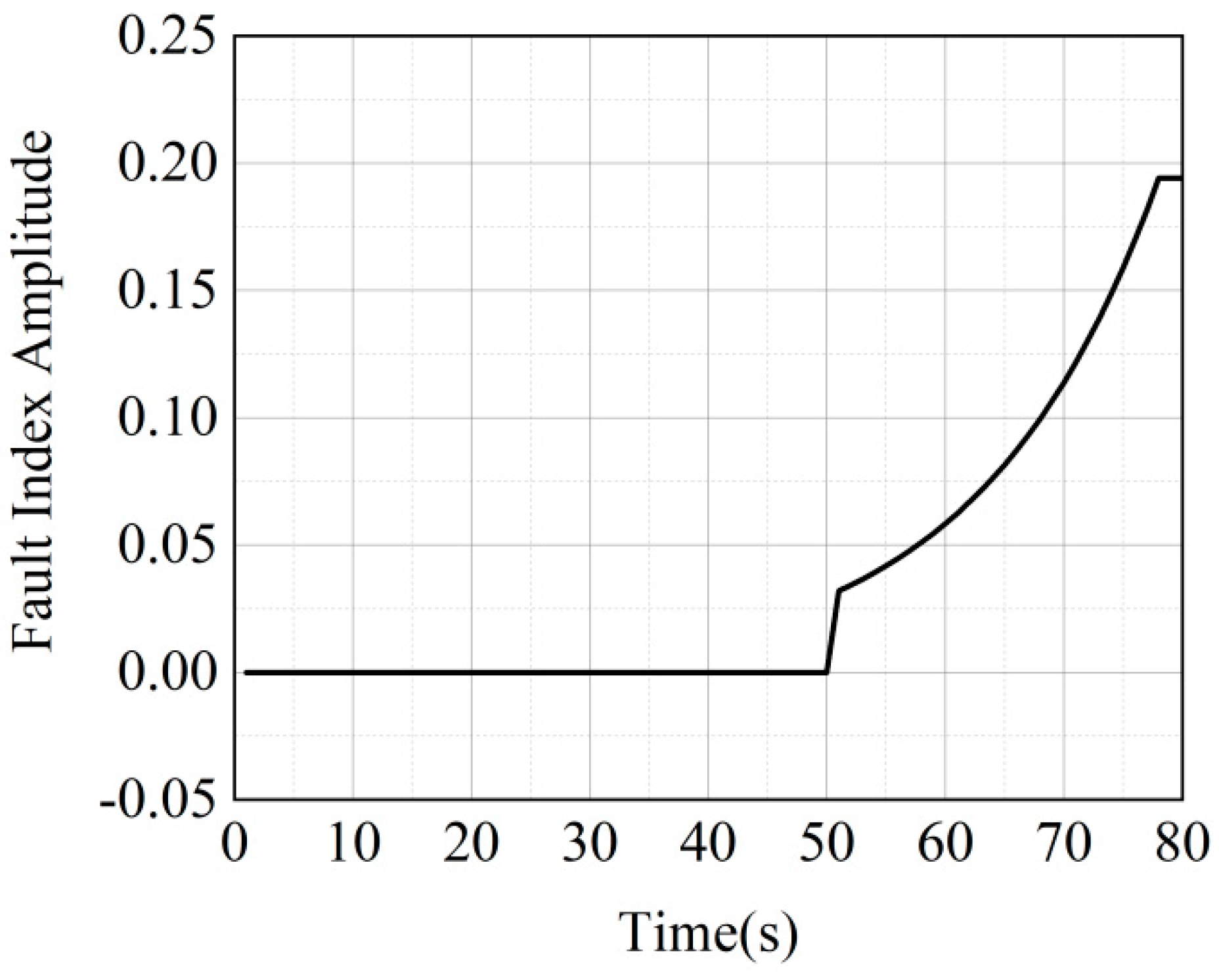
The simulation module consists of four parts: a longitudinal linearization model of an aircraft, an altitude control unit with a stability enhancement algorithm, a speed control unit, and a fault simulation module. The microvariation of the control input on the elevator drive motor involved in simulation case 1 is shown in
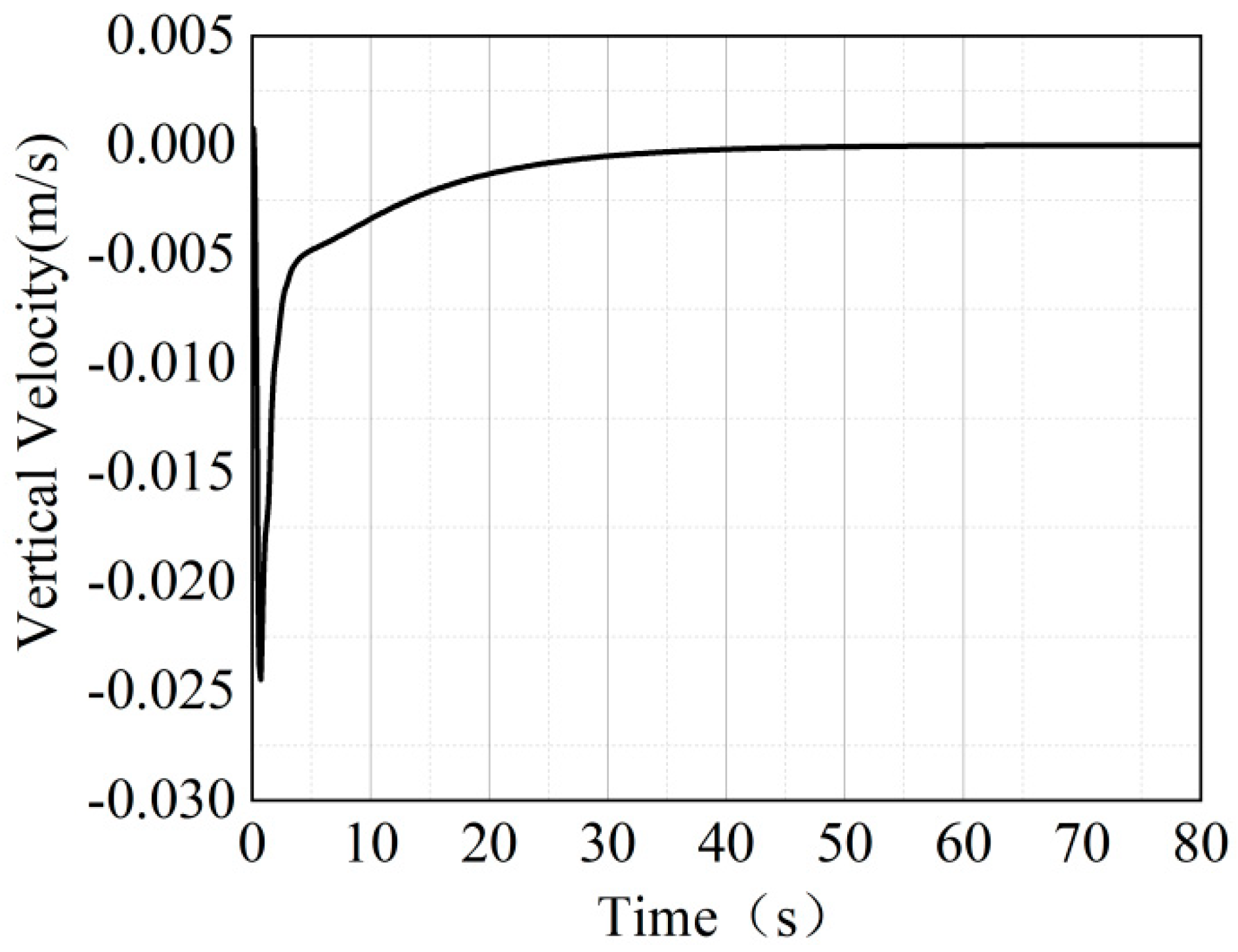
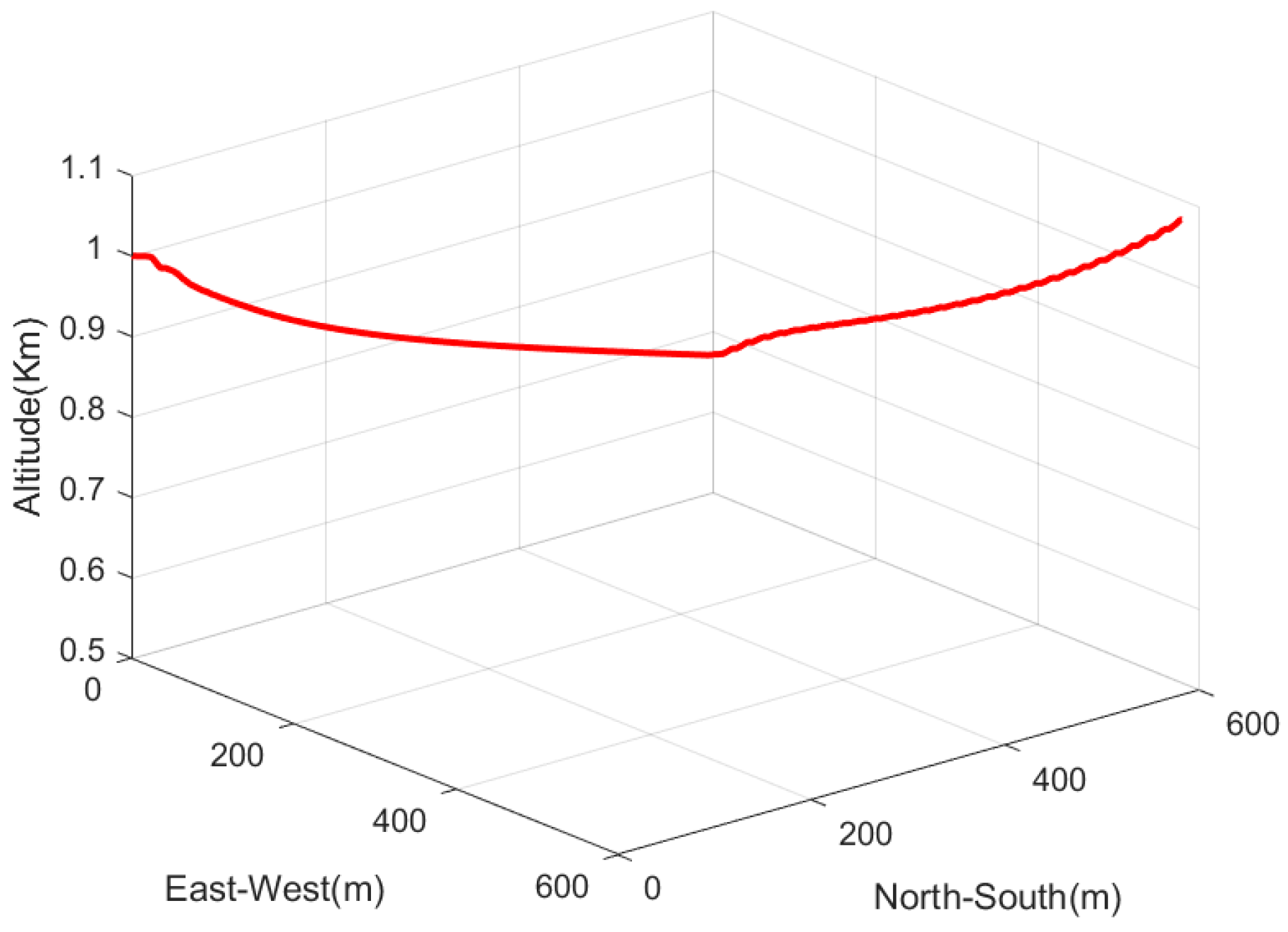
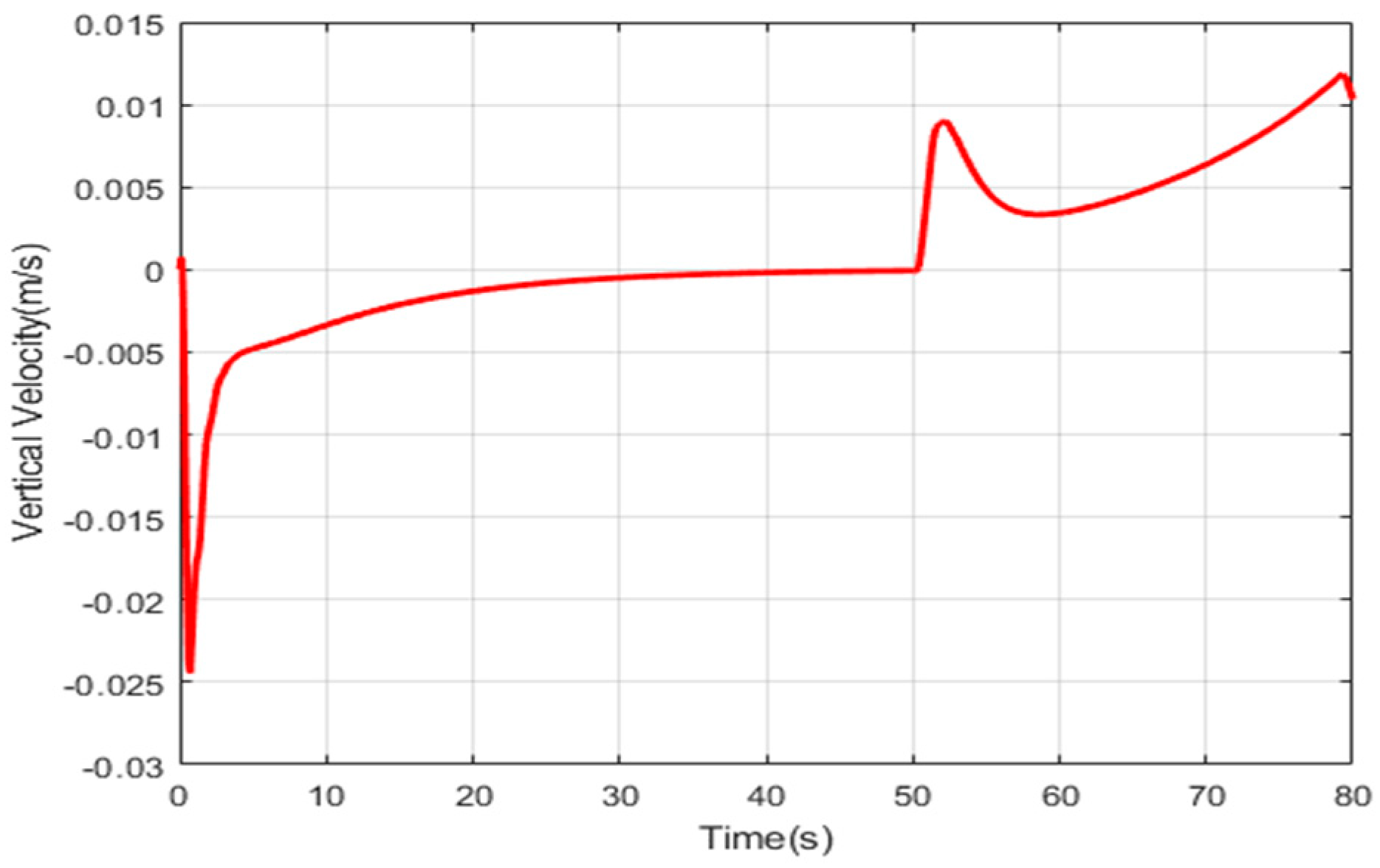
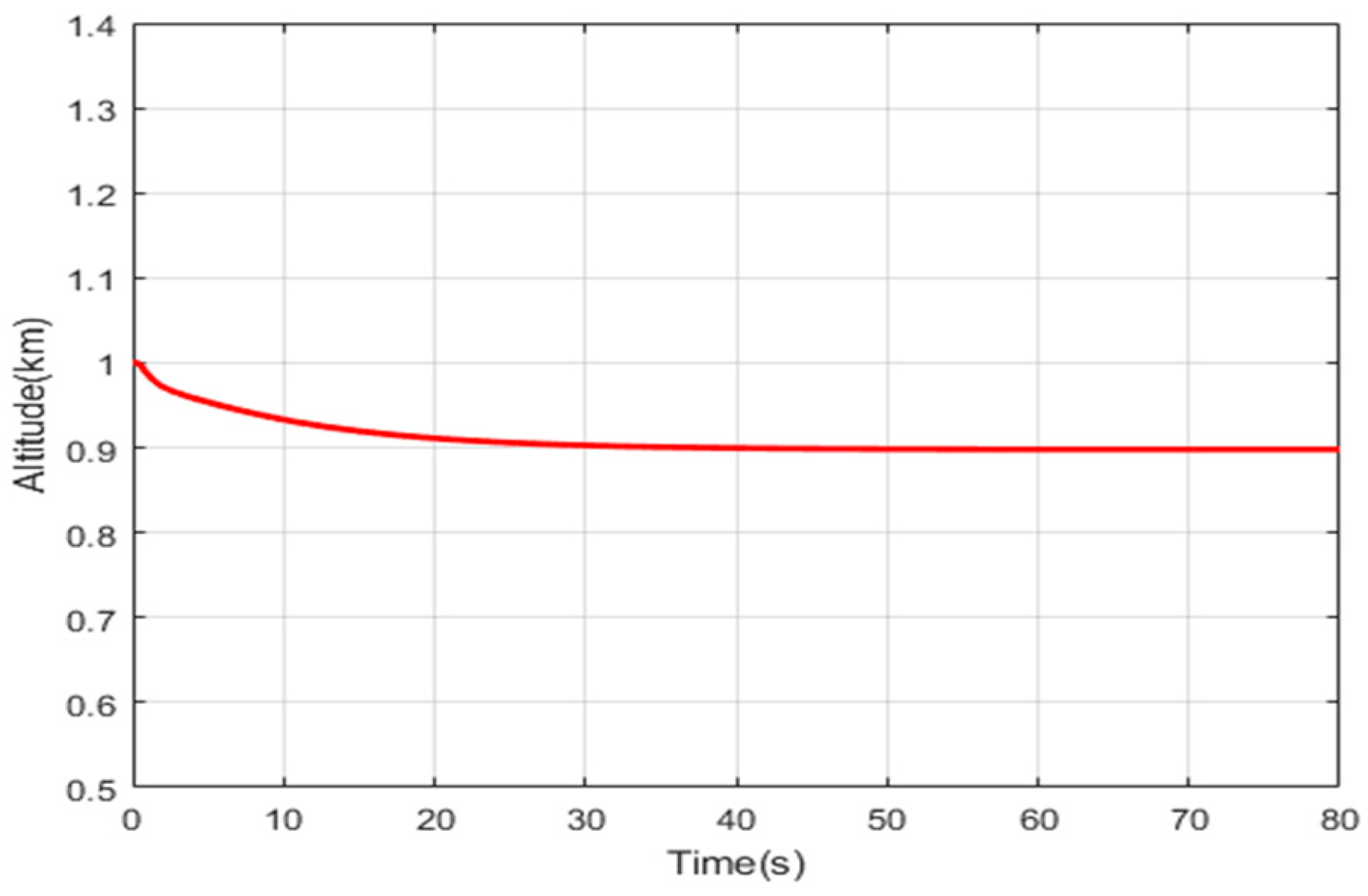
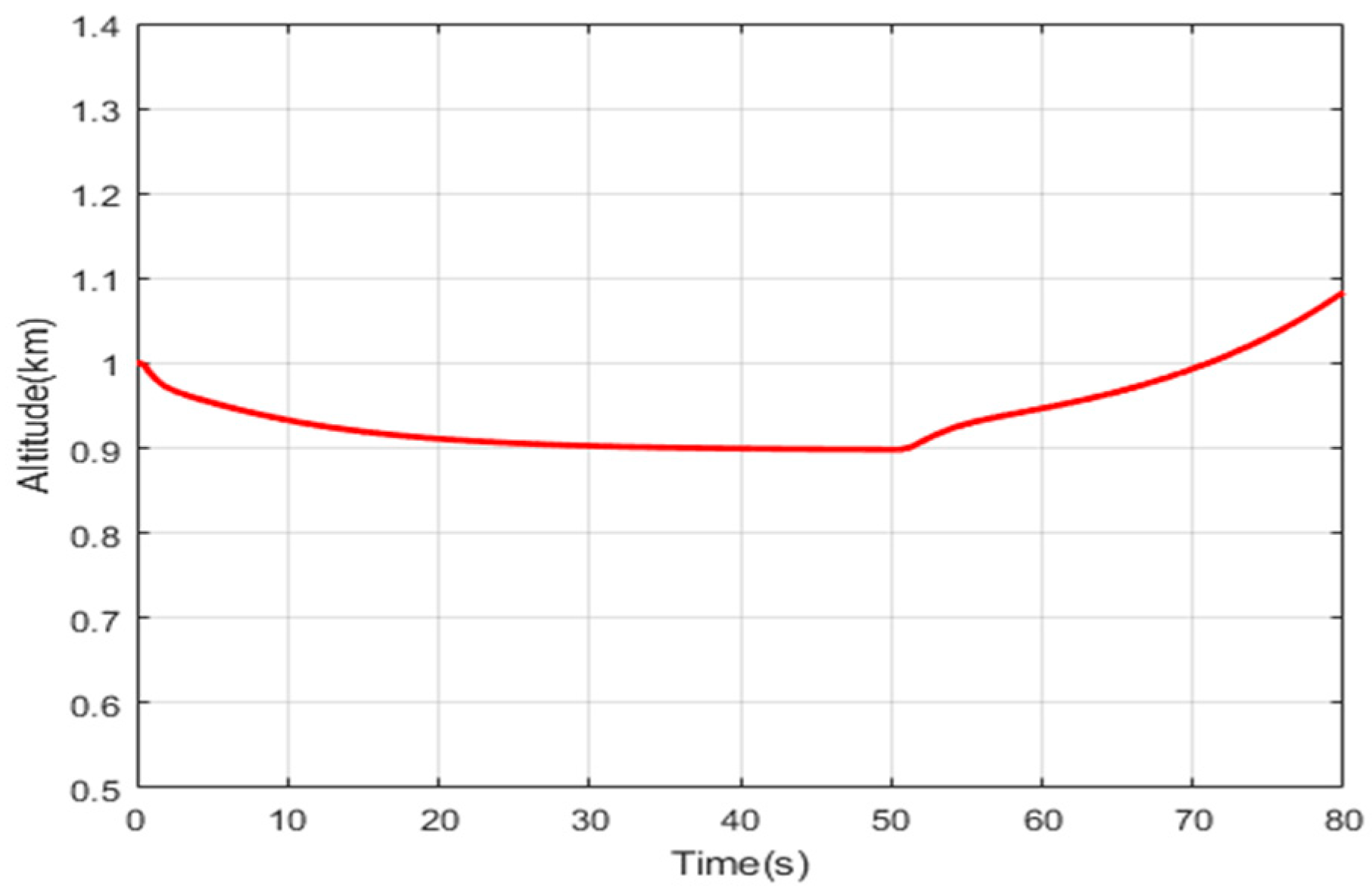
Figure 7. In the simulation performed in this study, the time of fault was consistent; however, to improve the readability of this article, the timeline is slightly adjusted in the displayed graphs. The linearized longitudinal state matrix of the “Beaver” aircraft was input into the flight control simulation model to collect the vertical velocity (
Figure 8) and flight track of the aircraft under fault-free conditions (
Figure 9) and the vertical velocity, altitude, and flight track of the aircraft under the fault condition (
Figure 10,
Figure 11 and
Figure 12, respectively). In comparison, when the fault signal is added at 50 s, there will be slight fluctuations in the vertical velocity and altitude control of the aircraft. It can be seen from the flight track chart that the pitch angle of the aircraft increases slightly, and the altitude also increases.
Here, the detection and estimation of actuator element and gain faults are discussed to verify the proposed method. In addition, the robustness of the method to model uncertainties and disturbances is confirmed. We compare the performance of the proposed method with those of previously reported methods to verify its effectiveness.
The performance of the proposed method is evaluated via the simulation of actuator process and gain failures.
In the following simulation, we utilized , , and . To transform the original model, the nonsingular transformation matrices and were calculated as follows:
,
. Then,
. In the simulation, the system disturbance is assumed to be bounded as
with
and
. By solving the LMI feasibility problems with the YALMIP toolbox, the following parameters were obtained:
Case 1: Actuator aging fatigue may cause incipient faults. The trend of incipient faults is slow. To simulate an incipient fault, it is preferable to choose the microvariation of the control input on the elevator drive motor as the simulation object. The system disturbance was selected as
, corresponding to high-frequency interference. The incipient faults occurring in the input channel of the system
were considered.
Figure 11,
Figure 12 and
Figure 13 show the detection of the fault
with
via the proposed method with
,
.
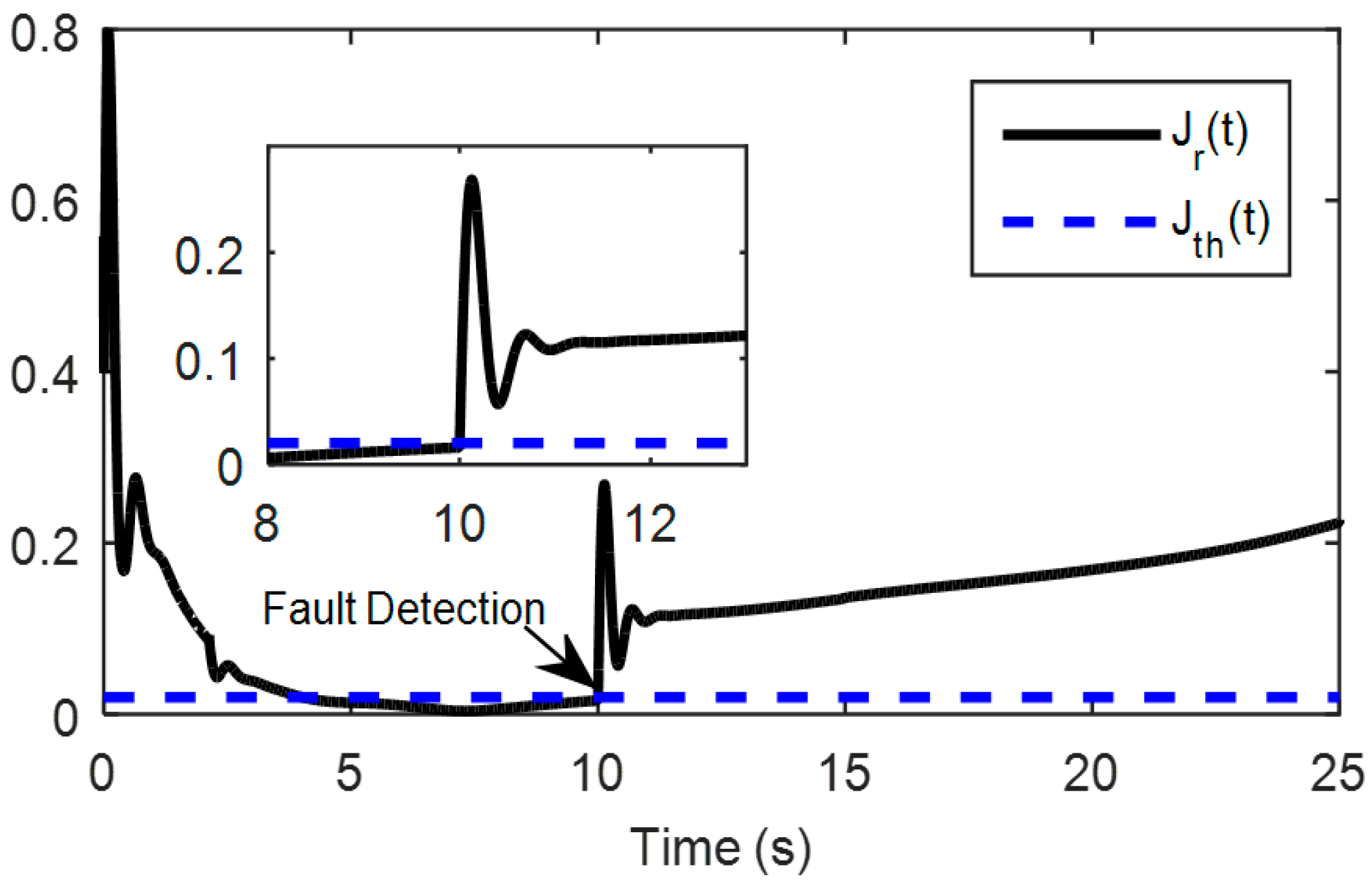
If there is no actuator fault in the system according to Remark 2, the evaluation function
approaches zero.
is close to zero before 10 s. When an actuator fault occurs, the evaluation function
deviates from zero, as shown in
Figure 13,
Figure 14 and
Figure 15 demonstrate that
exceeds the threshold function
at approximately 10.15 s, which is the time at which the actuator fault occurs. Therefore, an actuator fault is detected and an alarm signal is generated. The convergence of the evaluation function shows that the proposed method is accurate for fault estimation of the actuator and that the adaptive reconstruction method is accurate for actual fault estimation.
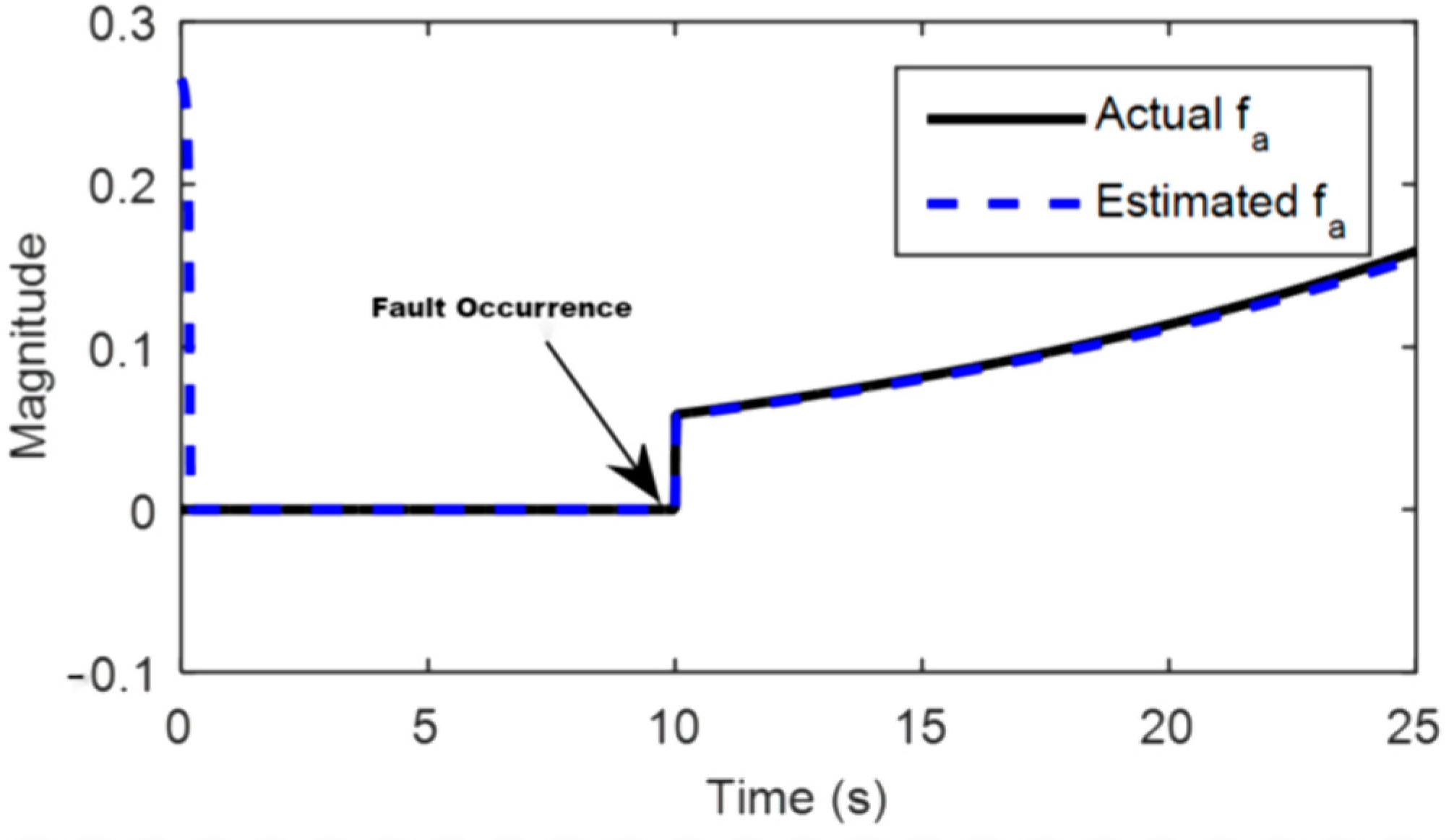
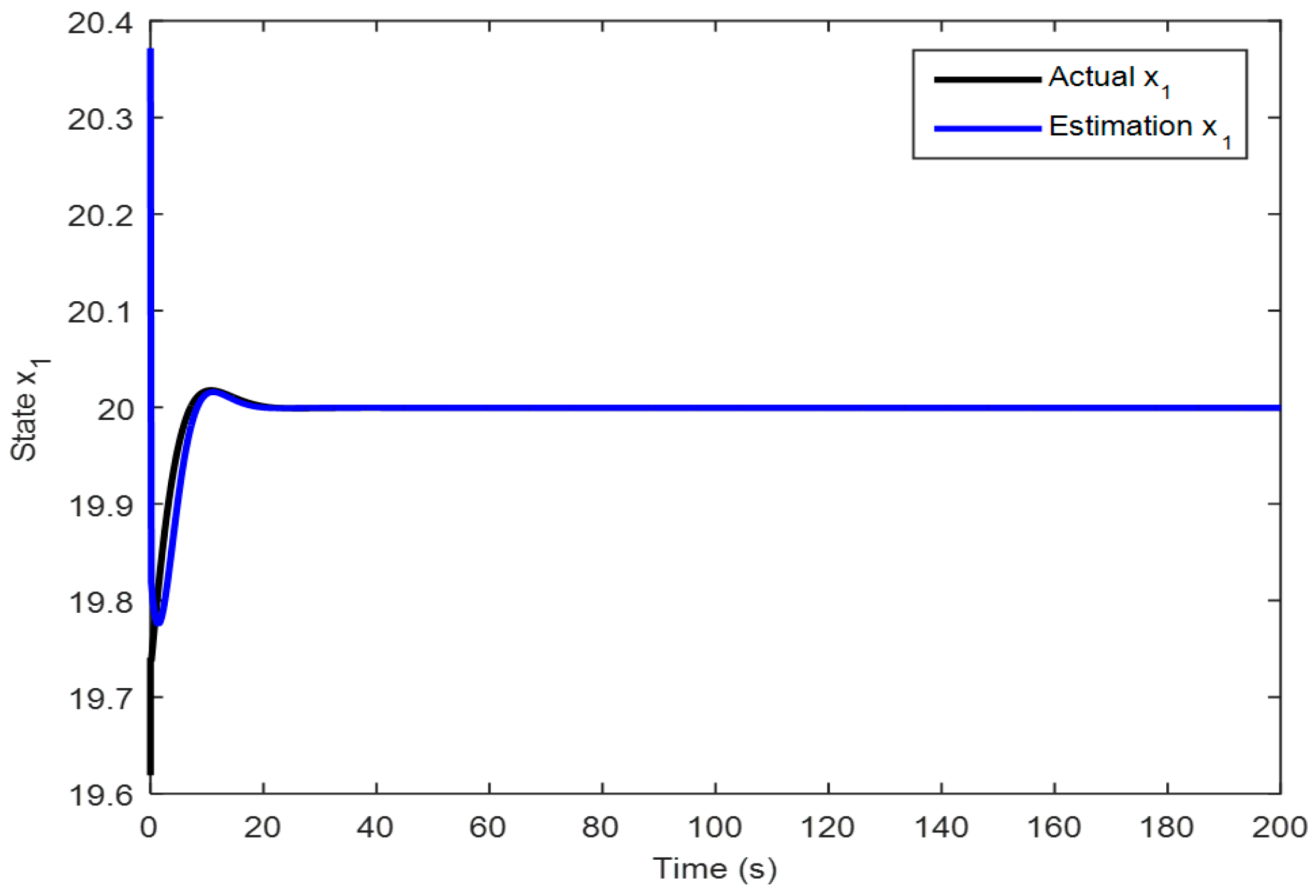
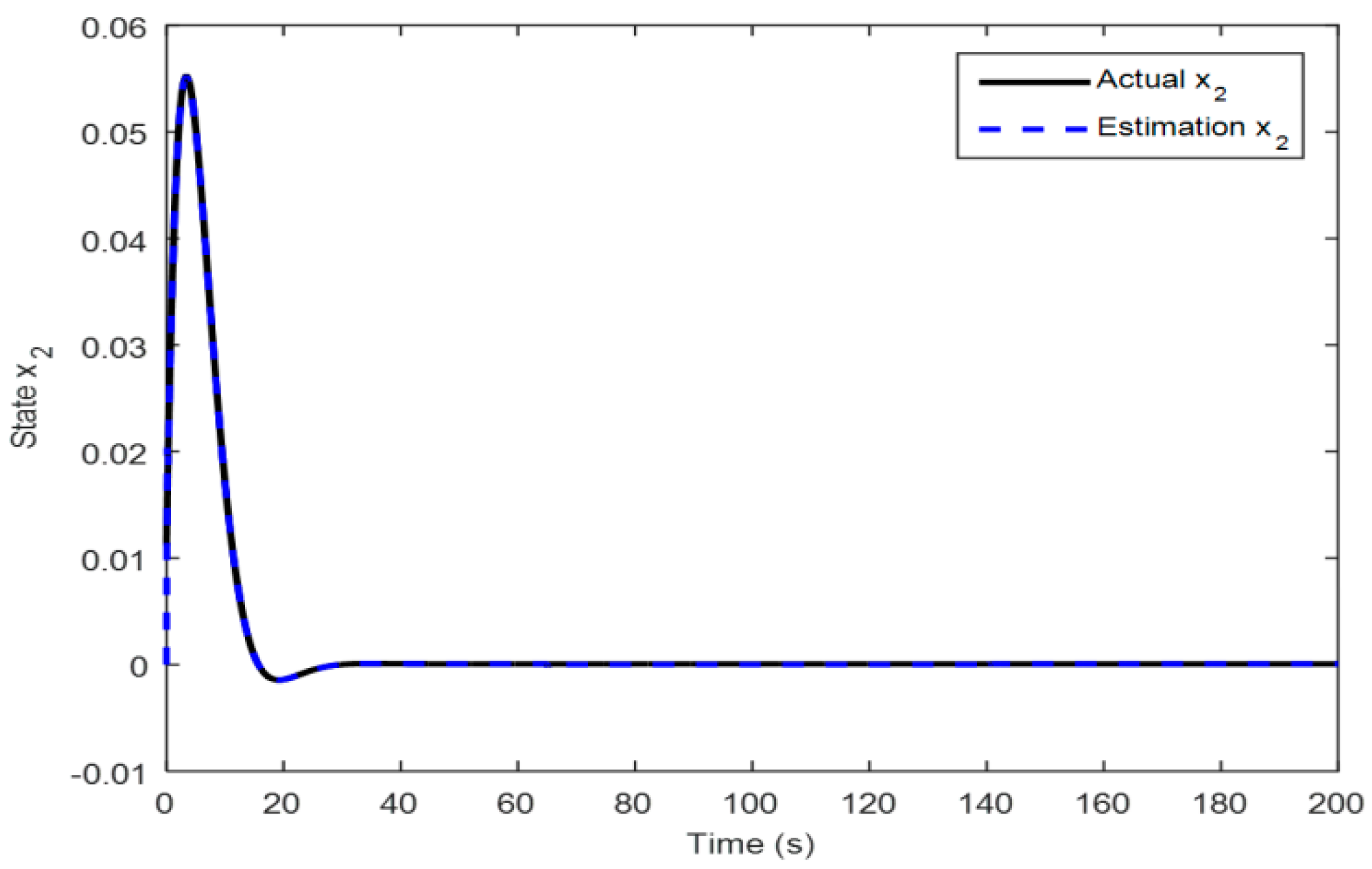
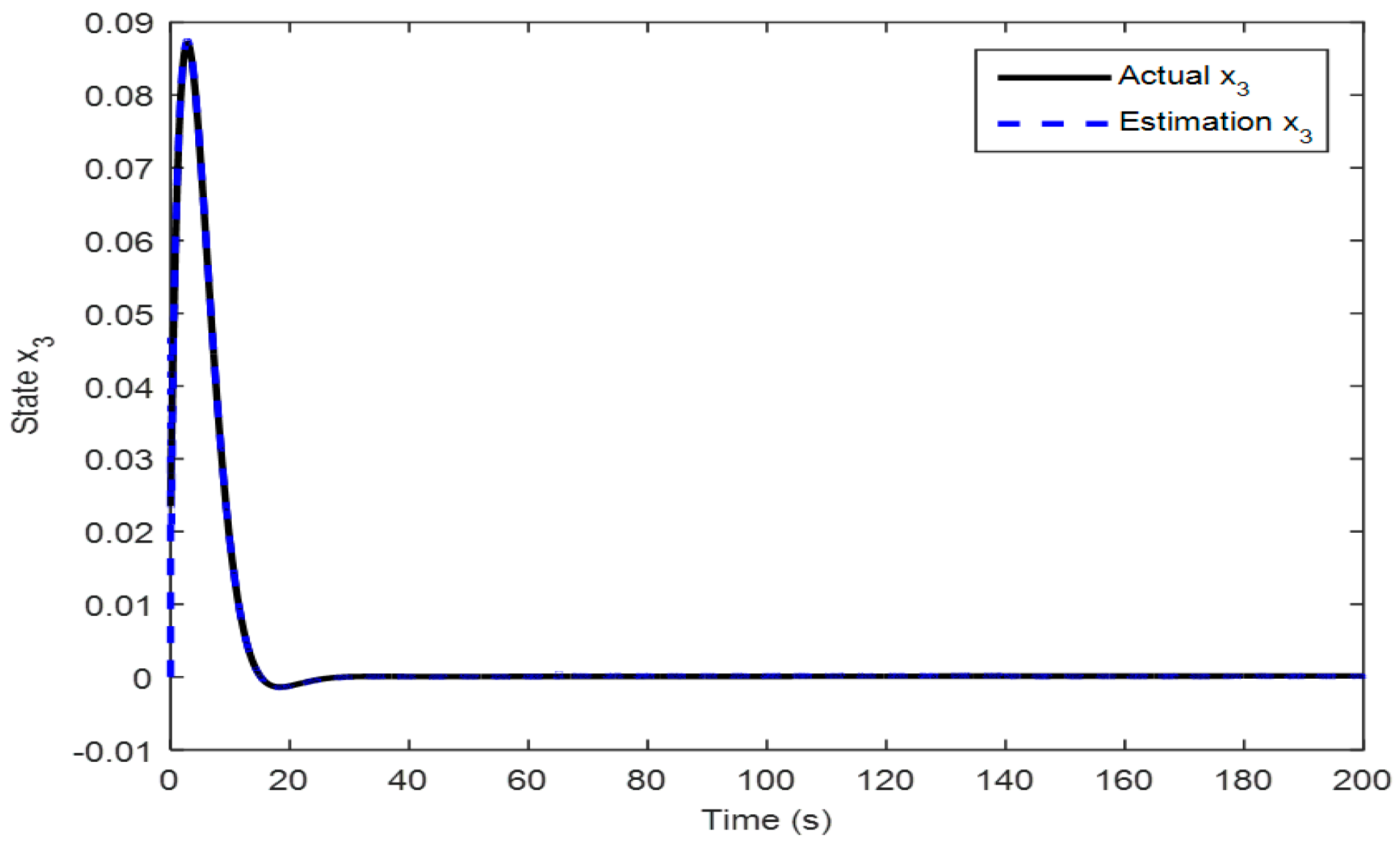
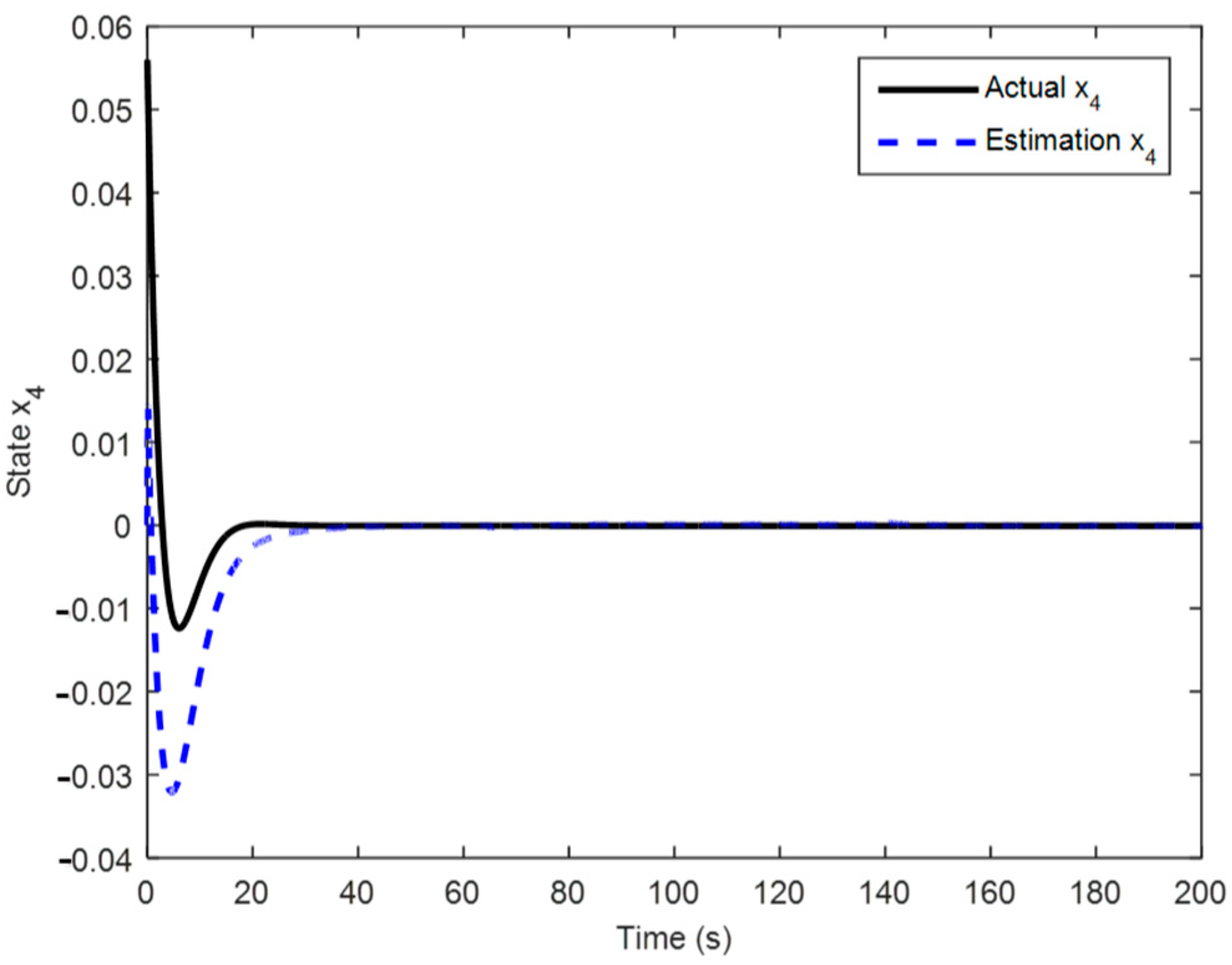
Figure 16,
Figure 17,
Figure 18 and
Figure 19 present the trajectories of the state variables and their estimated values. These results demonstrate that the proposed method can accurately estimate the states. Further, the proposed method can avoid the influence of system interference and accurately reconstruct actuator faults. Minimizing the coefficient value of the proposed method improves the robustness of unknown signals and achieves the desired actuator fault reconstruction and state variable accuracy.
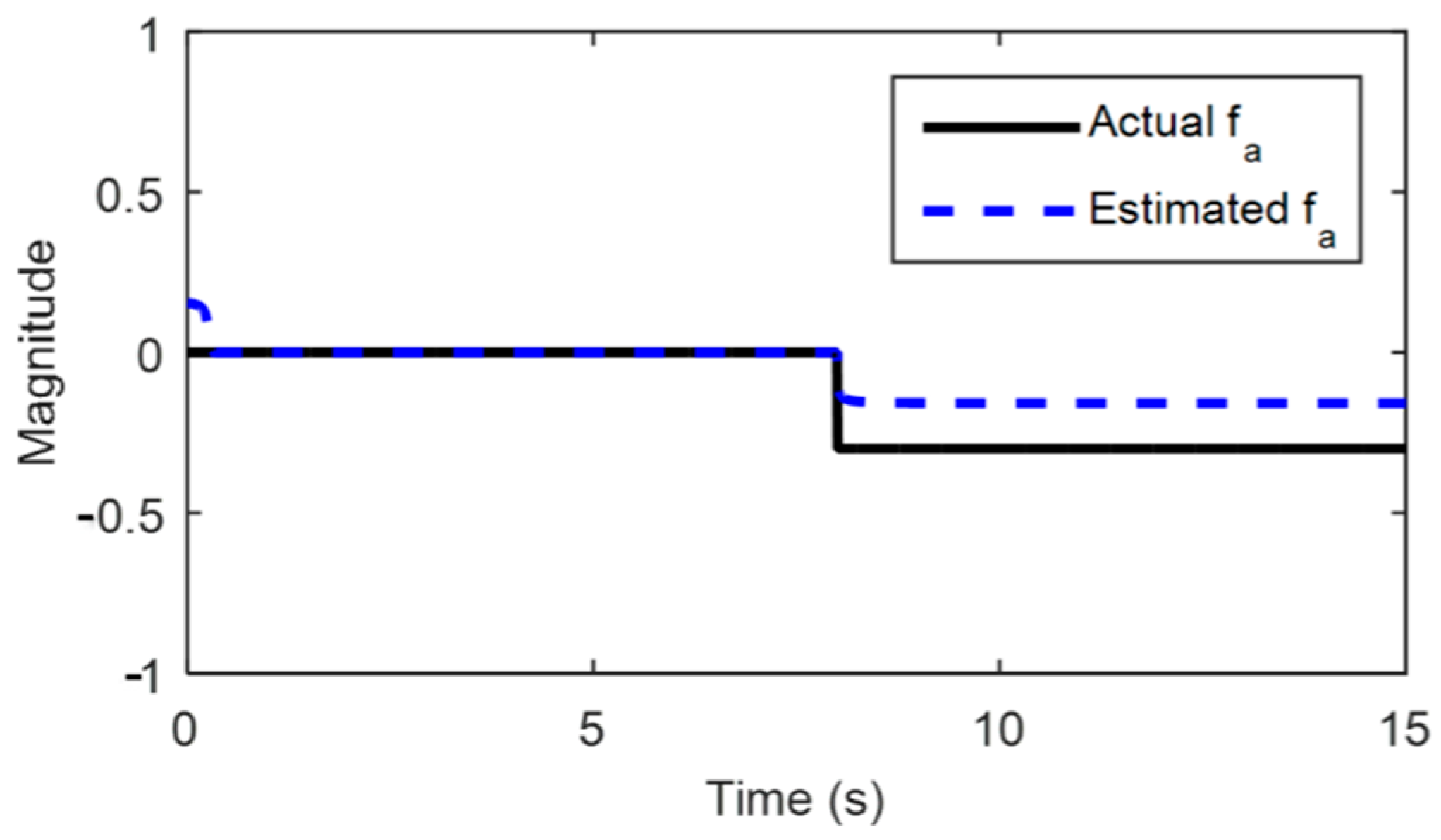
Case 2: In this case, an actuator gain fault (partial fault of the actuator control input) occurs. When the aircraft flight control system is unloaded, it is easily disturbed by the external airflow during flight, and the driving voltage cannot be accurately located on the reference voltage, which leads to small jumps and faults in the control input. This type of fault is minor, causing a very small number of faults, and is not easily detected. Partial faults and weak jumps of the control inputs were simulated in Simulation 2. The disturbance was selected as
, corresponding to high-frequency interference. Consider the incipient faults occurring in the input channel of the system.
Figure 20 and
Figure 21 show the detection of the fault
with
via the proposed method, with
,
.
According to the second part of the theory, if there is no fault, the evaluation function
approaches zero. In this case,
is close to zero before 8 s. When an actuator fault occurs, the evaluation function
deviates from zero, as shown in
Figure 20.
Figure 20 and
Figure 21 demonstrate that
exceeds the threshold function,
, at 8.2 s. The convergence of the evaluation function shows that the proposed method can accurately estimate actuator faults, while the adaptive reconstruction method can accurately estimate actual faults.
The proposed method is verified using two fault examples, and the simulation results are compared with those obtained using the existing methods. For the incipient fault detection of closed-loop control systems, the total measurable fault information residual (ToMFIR) was proposed for the first time [
39], which can collect comprehensive fault information in a closed-loop system. The ToMFIR consists of two parts: output residuals collected at the system output and controller residuals collected at the controller output. The output residuals represent the fault information for which the controller cannot compensate, and the compensated fault information exists in the controller residuals. In [
39], an improved ToMFIR-based incipient fault detection and estimation method was proposed and applied to a high-speed railway vehicle suspension system. Although the improved ToMFIR method considered the system disturbance and utilized a more general framework, the incipient fault estimation method developed in this study removes the fault type limitation in [
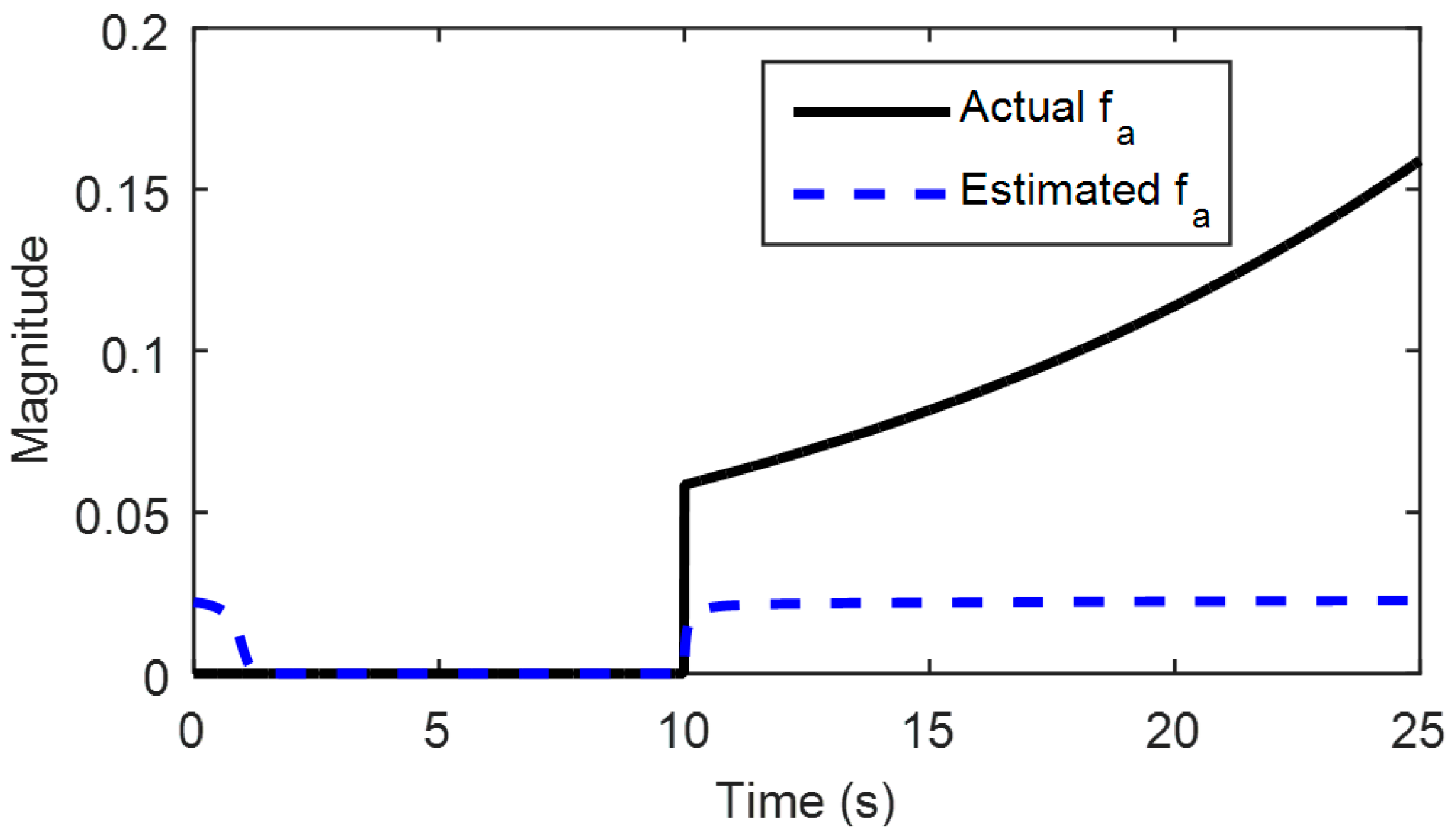
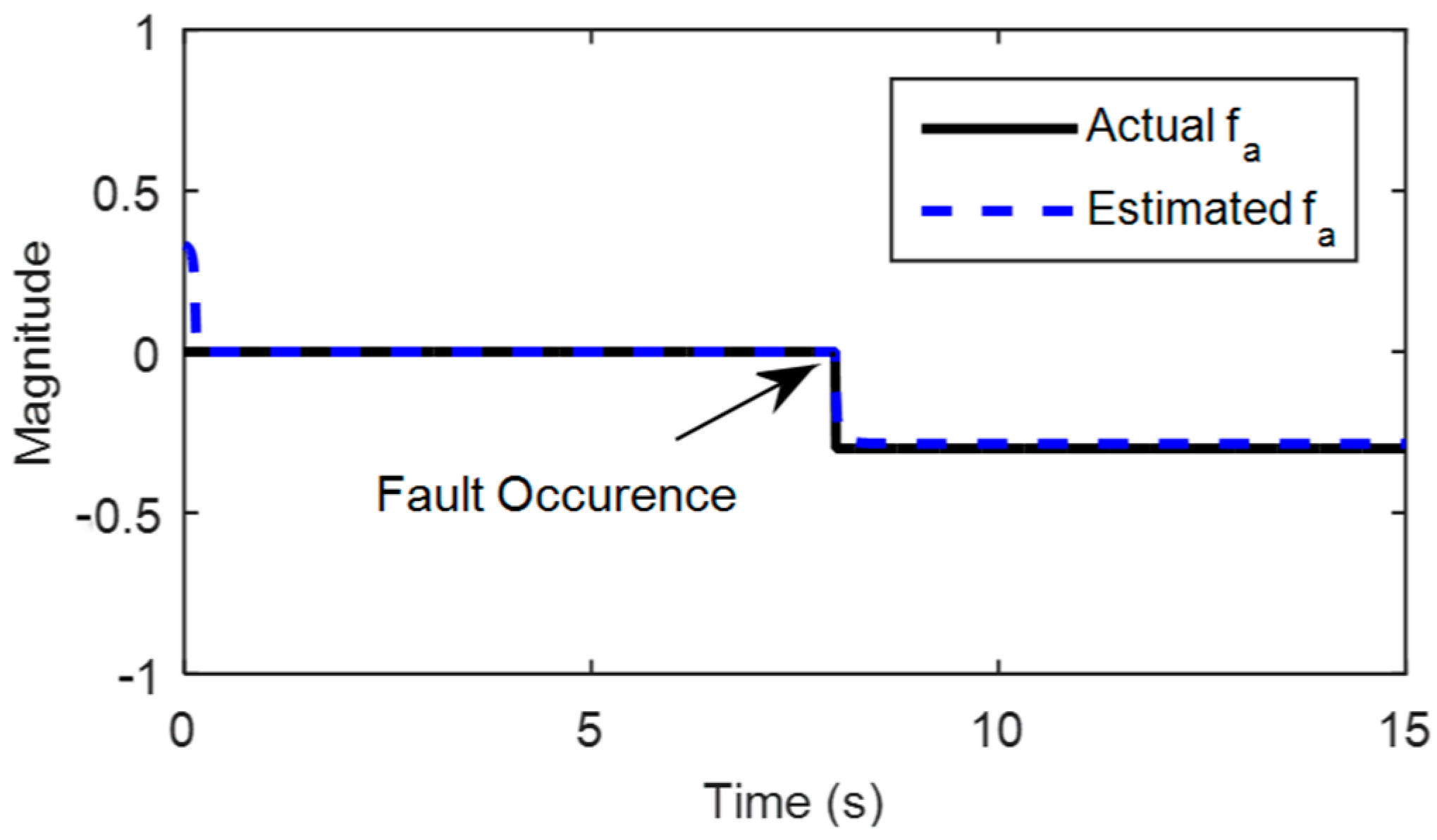
39]. The incipient fault estimation methods were used to estimate the faults of typical fixed-wing aircraft actuators, as shown in
Figure 15 and
Figure 22. The detection time, mean square error (MSE), and robustness of the methods to uncertainty were investigated.
Table 5 summarizes the results of comparing the effectiveness of adaptive fault detection and fault reconstruction with that of the method reported in [
39]. Comparisons of
Figure 14 with
Figure 15 and
Figure 22 with
Figure 23 reveal that the proposed method can match the actual actuator values more closely than the previous approach and thus has better estimation performance.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






















