
Design and Preliminary Performance Assessment of a PHM System for Electromechanical Flight Control Actuators

Abstract
:1. Introduction
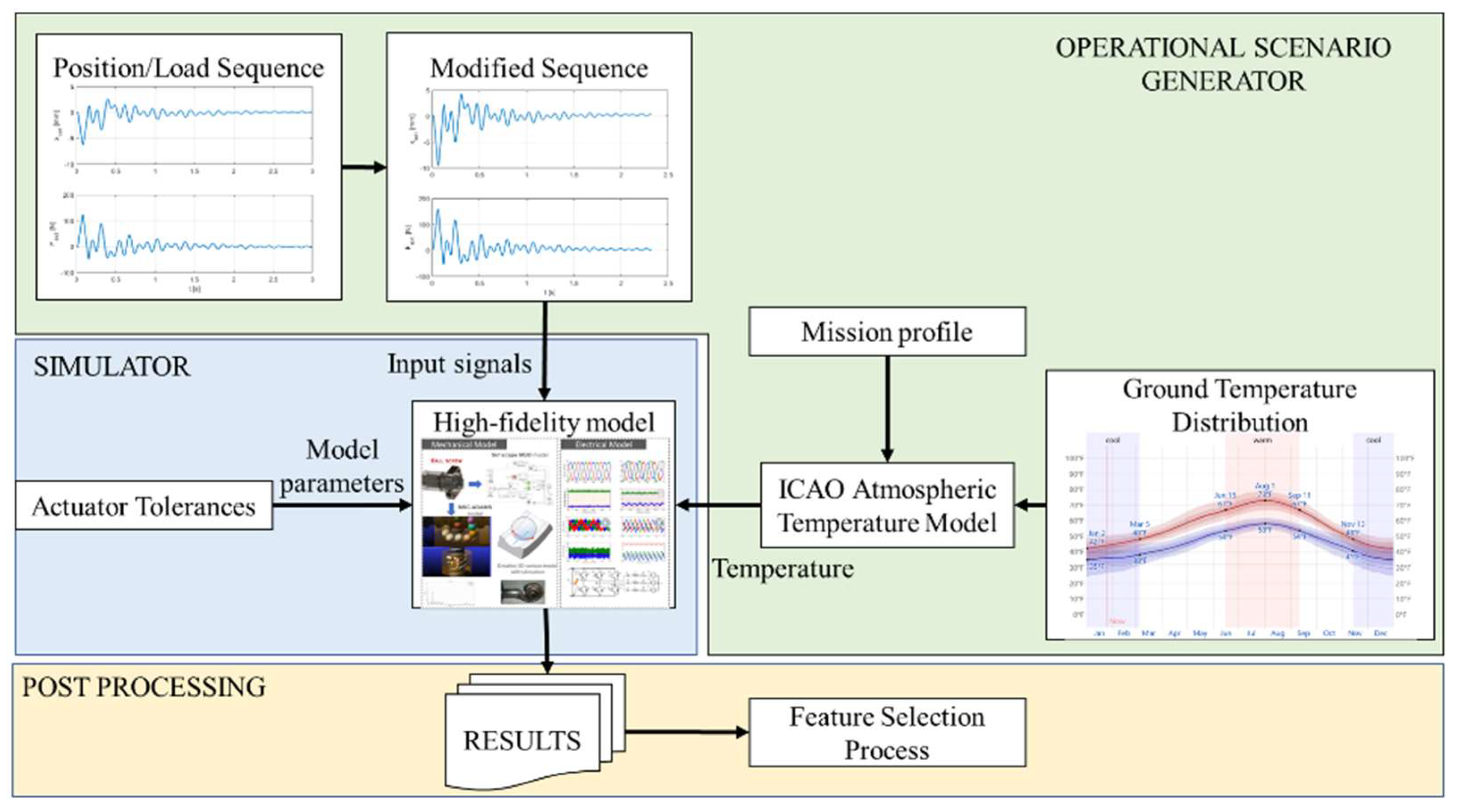
2. Research Workflow
3. Preliminary Activities and Simulation Environment
3.1. Approach and Design Goals
3.2. Case Study and FMECA Analysis
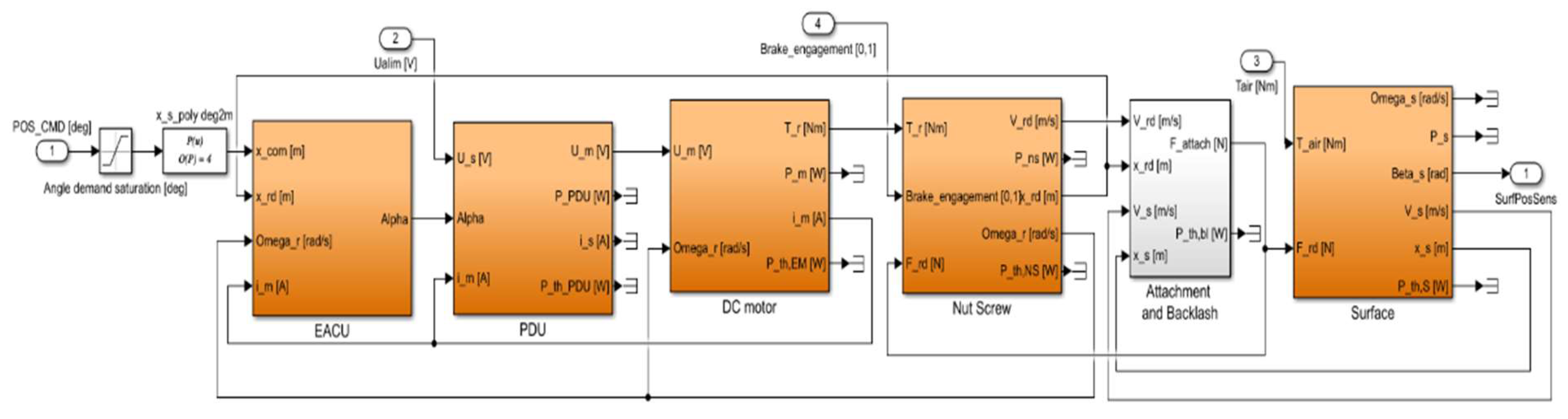
3.3. High-Fidelity Modeling
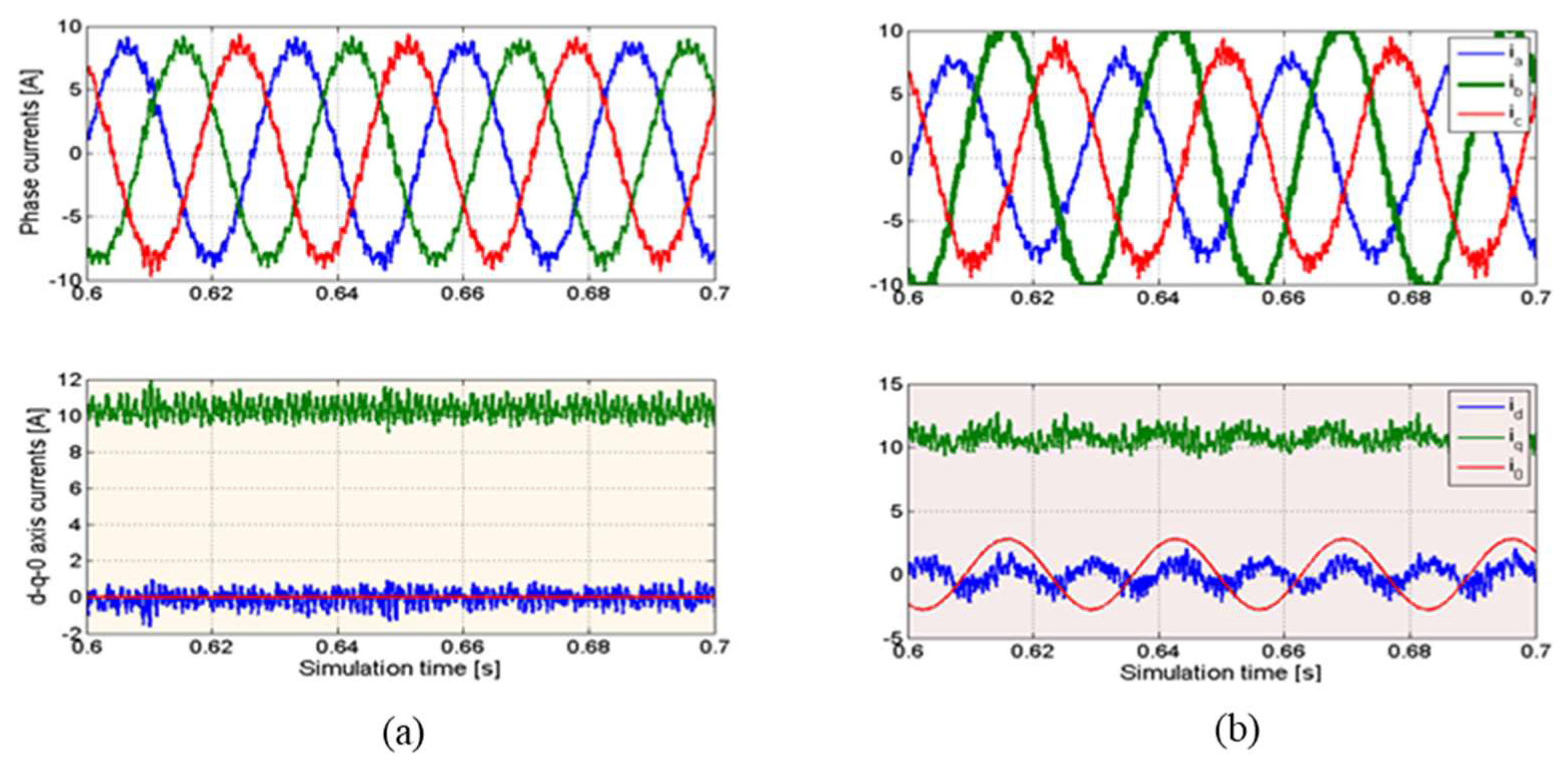
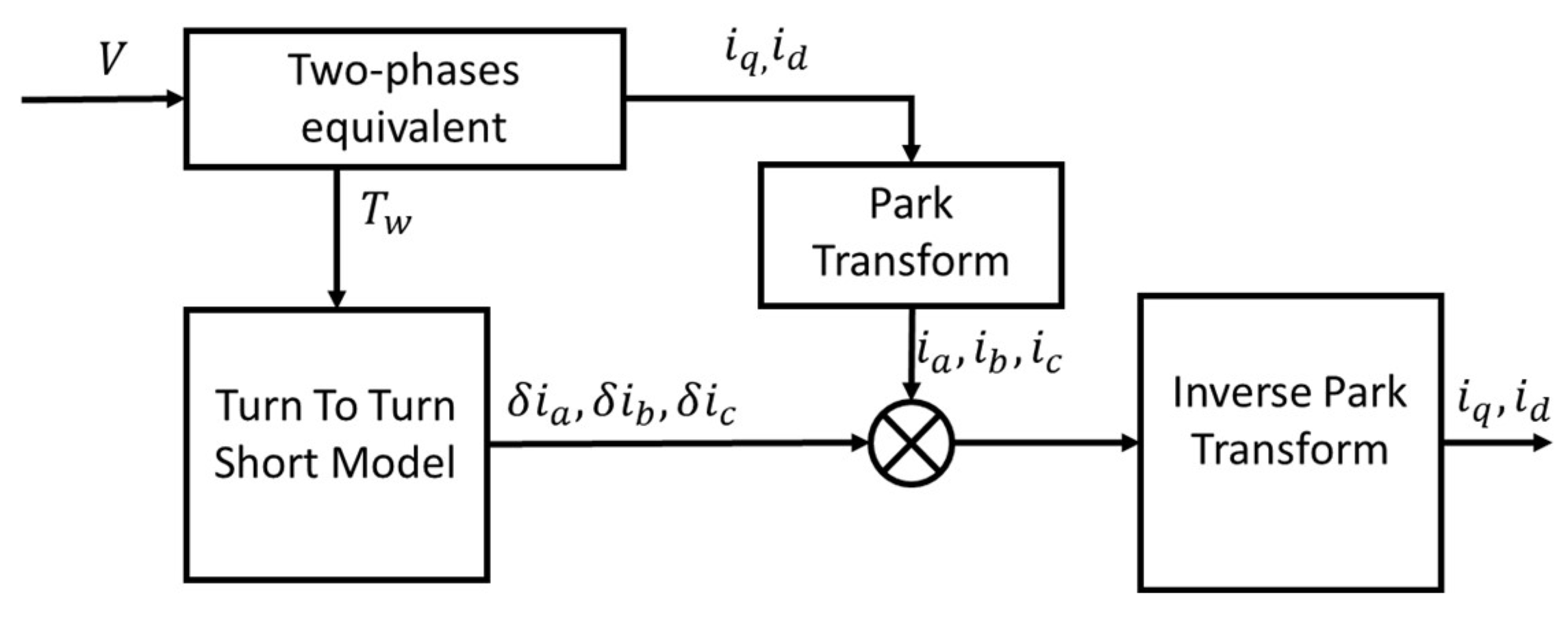
3.3.1. Electric Drive
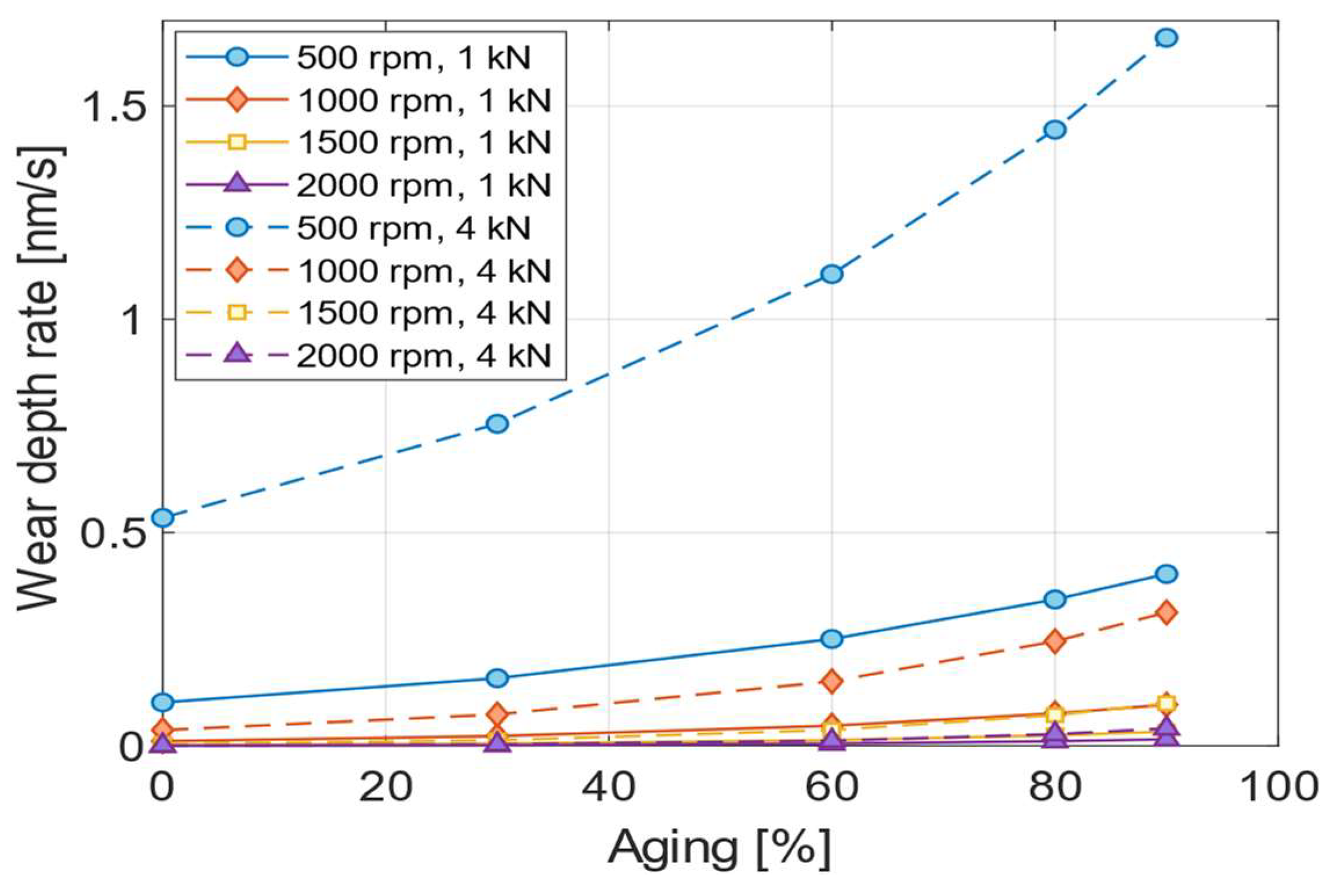
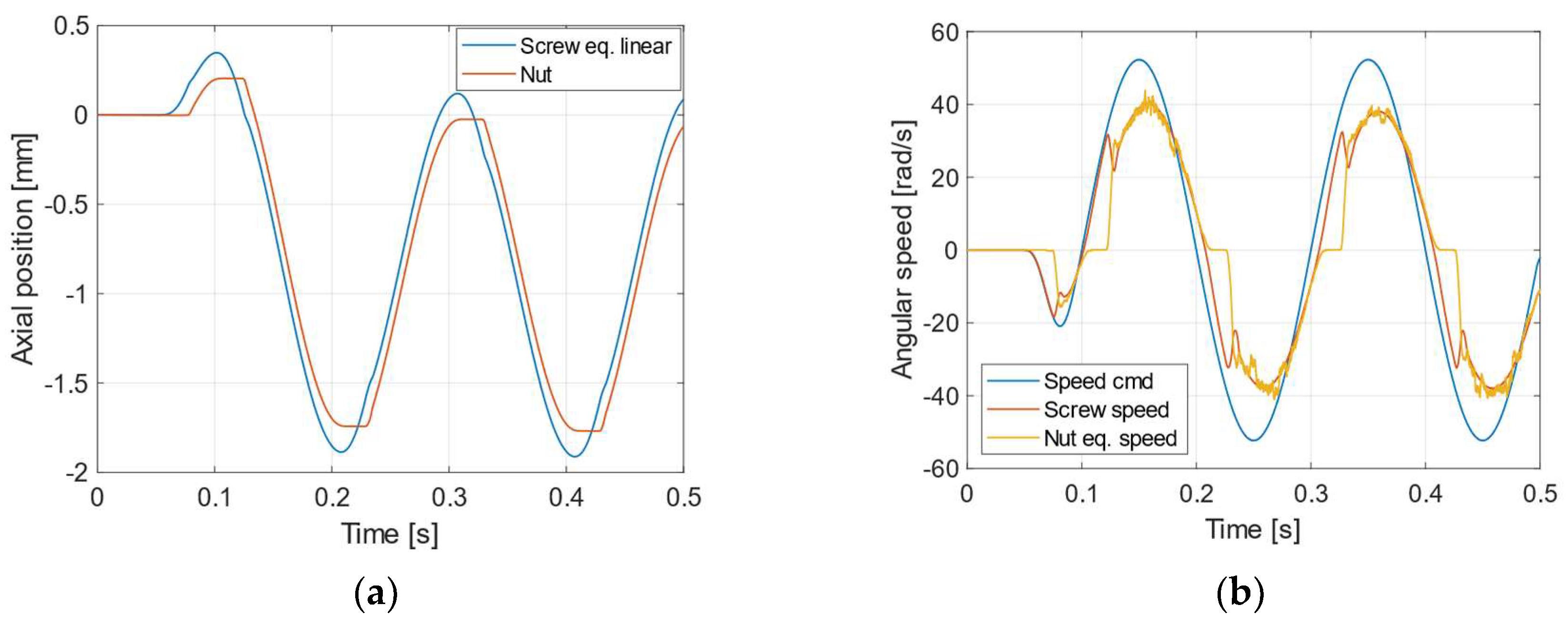
3.3.2. Mechanical Transmission
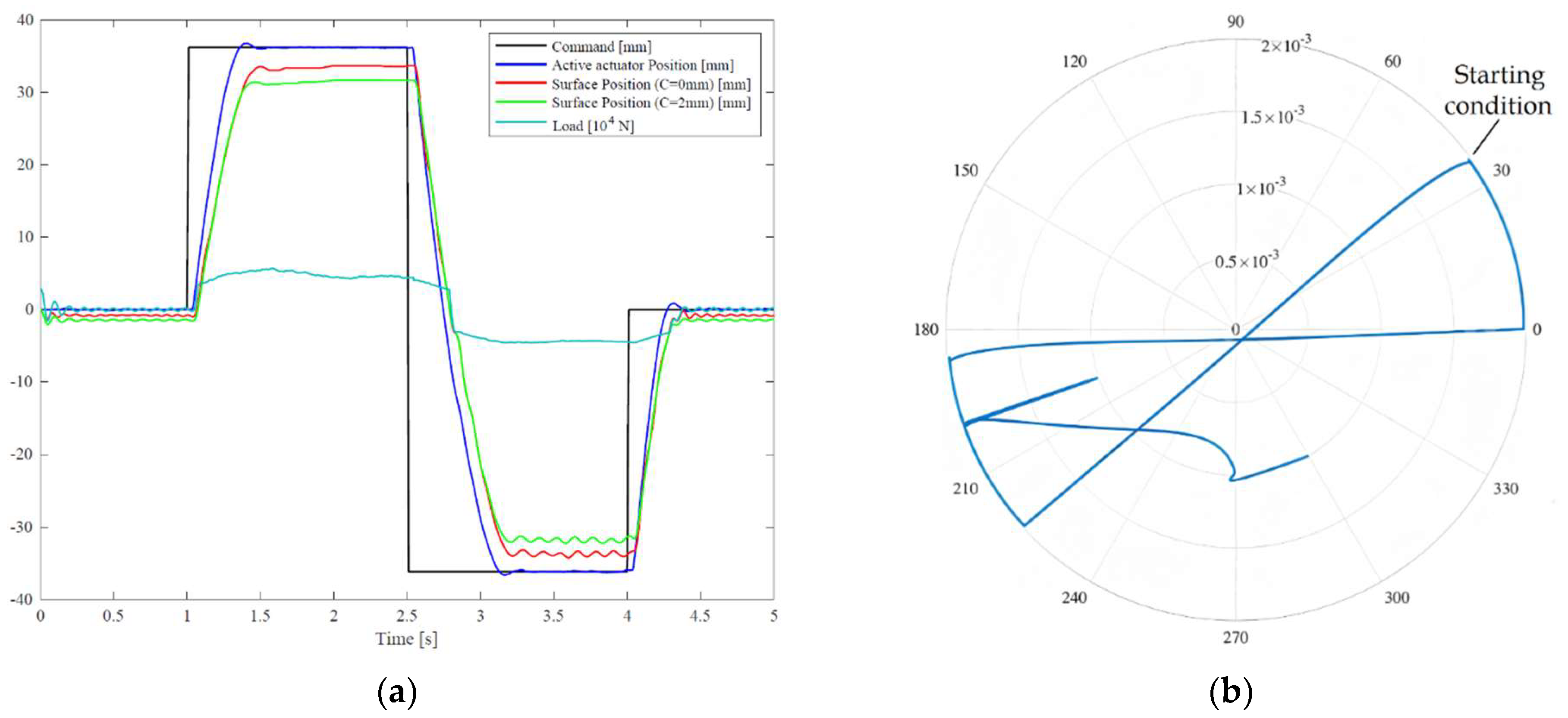
3.3.3. Rod-End
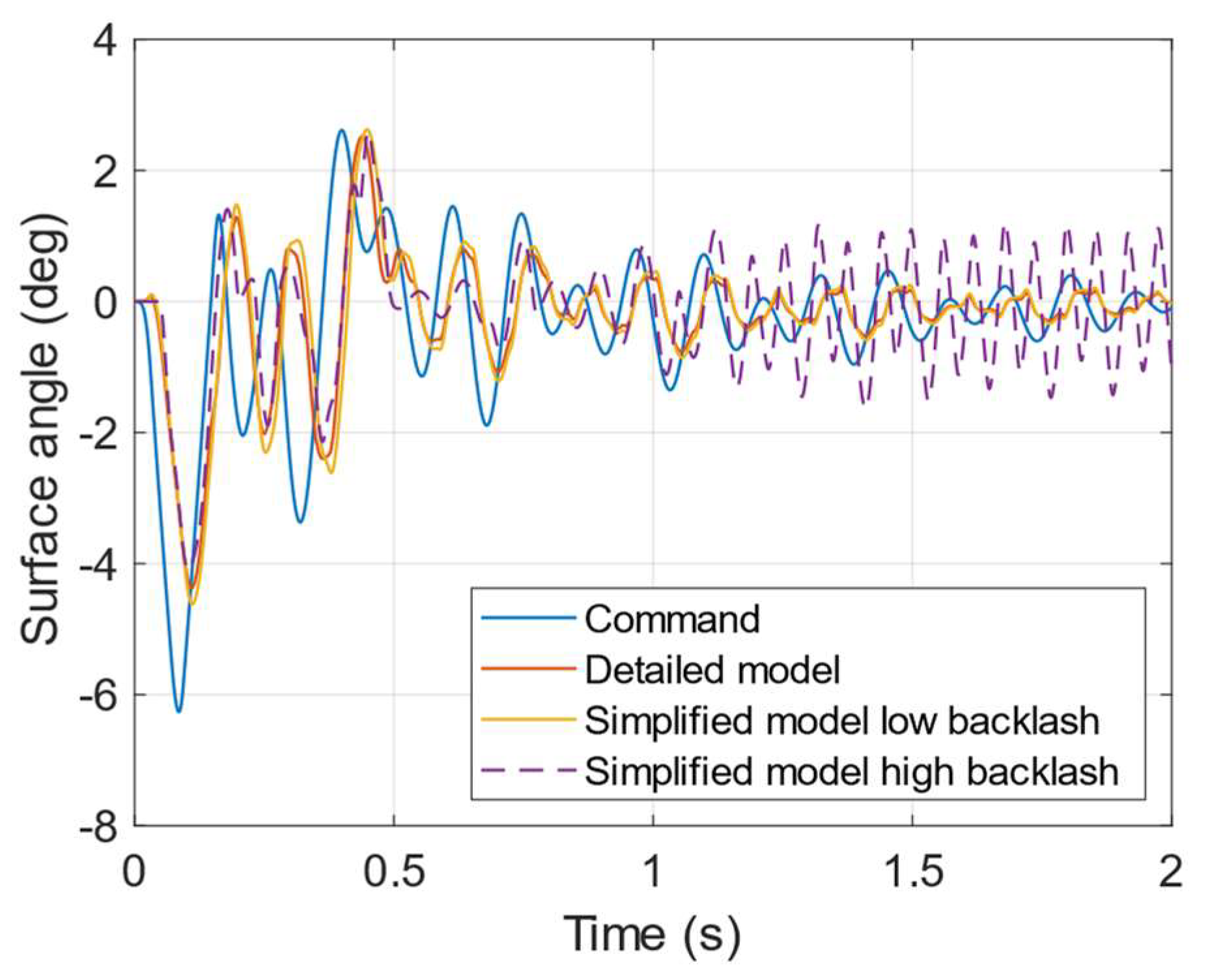
3.4. Real-Time Modeling
- Replace expressions with high computational cost with approximated low-order forms,
- Minimize the number of integrators and state variables,
- Reduce or avoid repeated calculi or Boolean checks,
- Optimize the C++ executable creation options for RT target, and
- Substitute continuous-time integrators with discrete-time state variable.
4. PHM Framework Design
4.1. PHM Framework Design-Preliminary Operations
4.2. PHM Framework Design-Framework and Algorithms Choice
4.3. PHM Framework Design-Implementation and Verification Process
5. Results
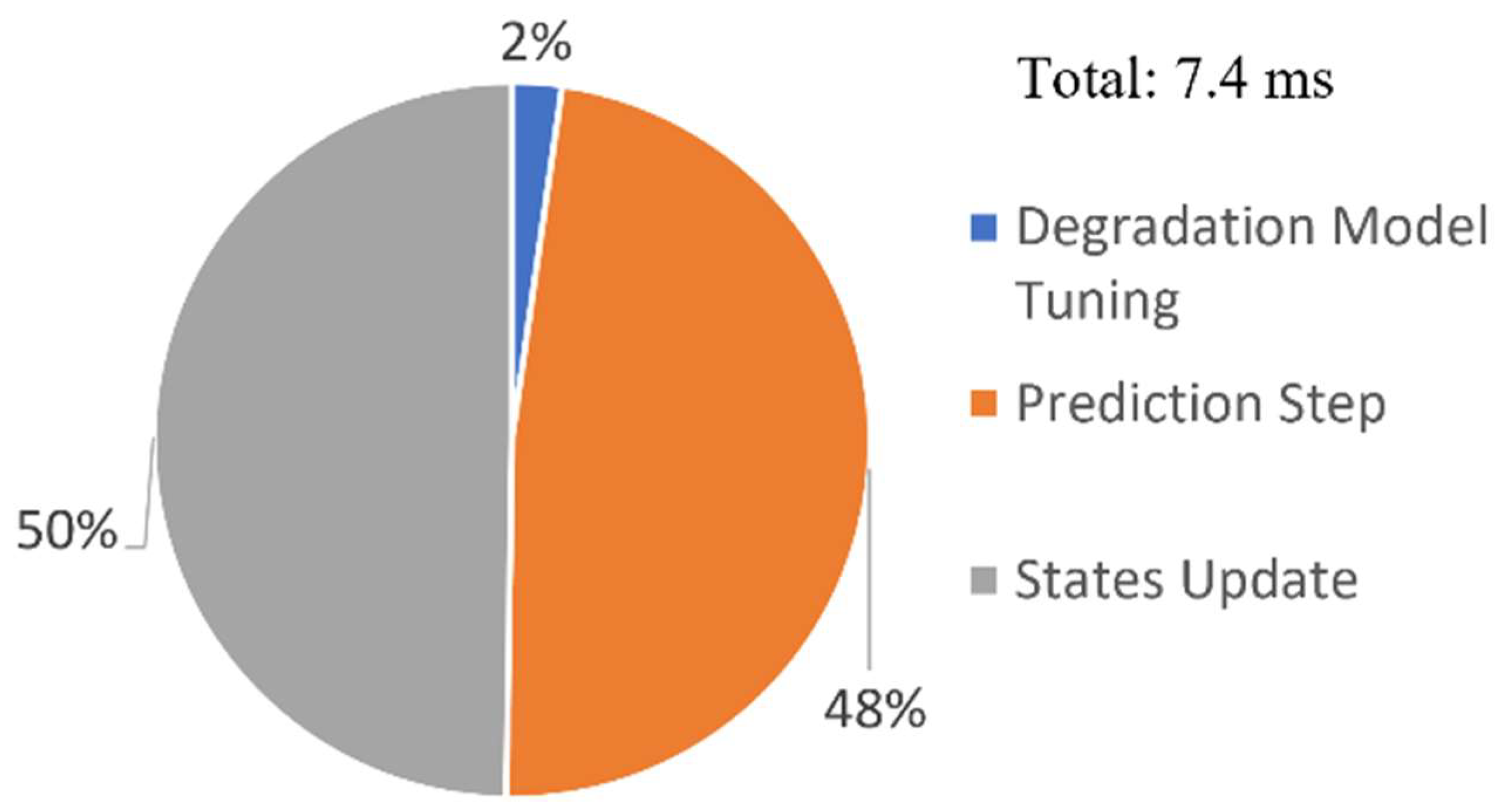
5.1. Implementation Targets
5.2. Preliminary Evaluation of Prognostic Performances
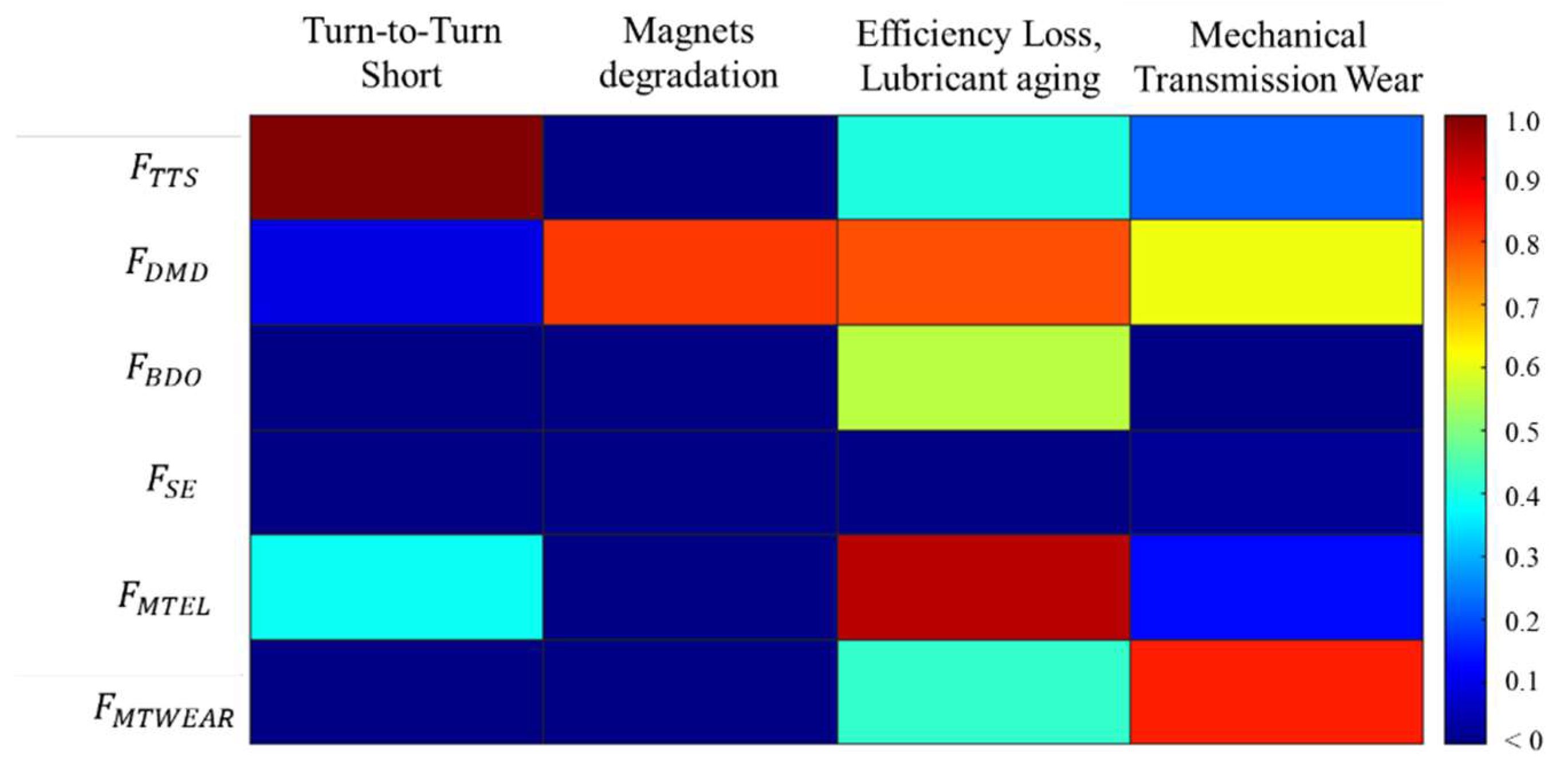
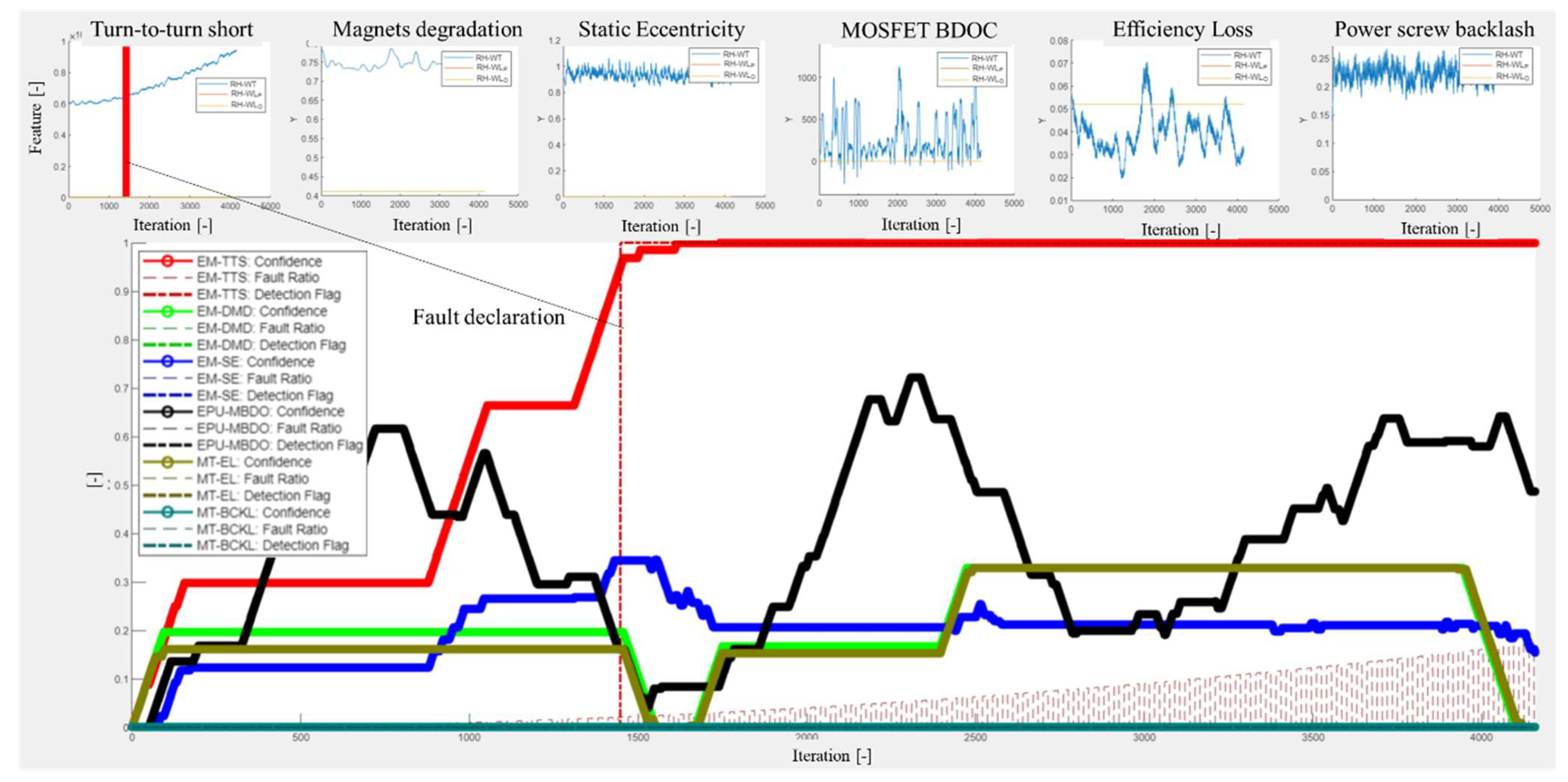
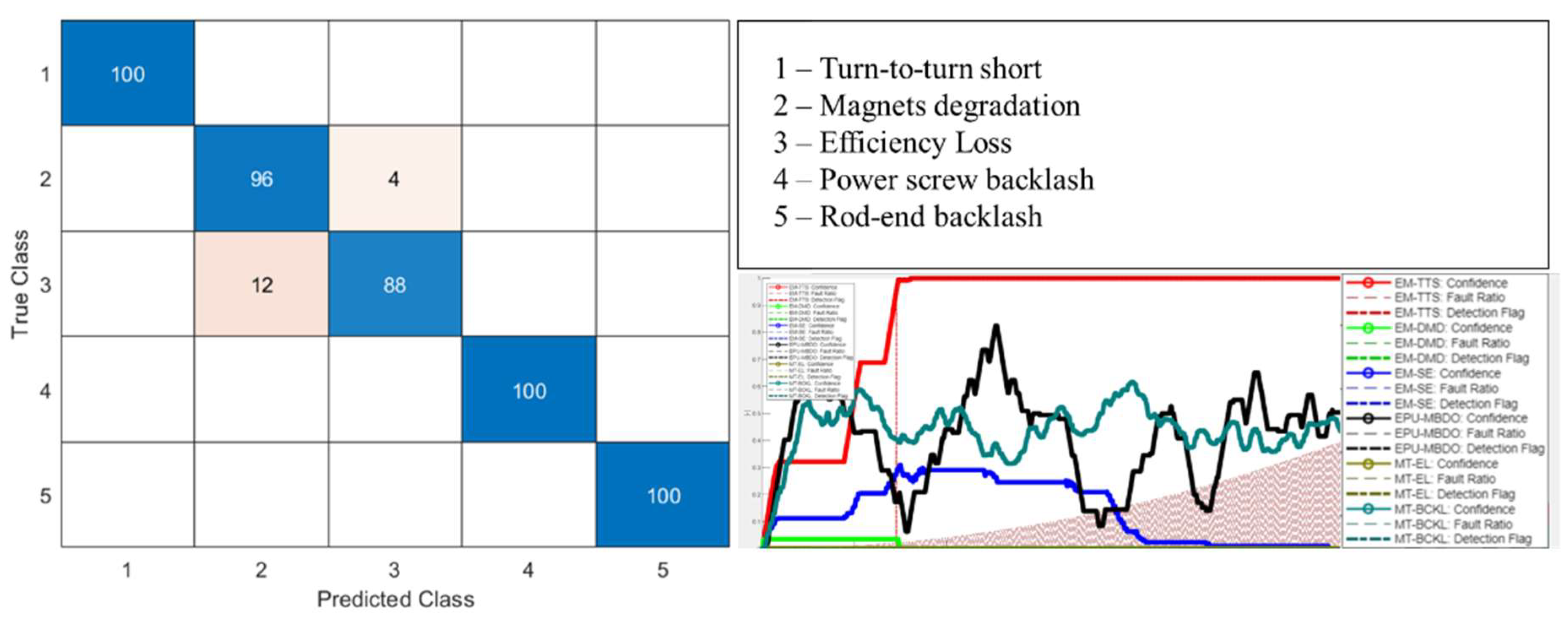
5.2.1. Fault Diagnosis
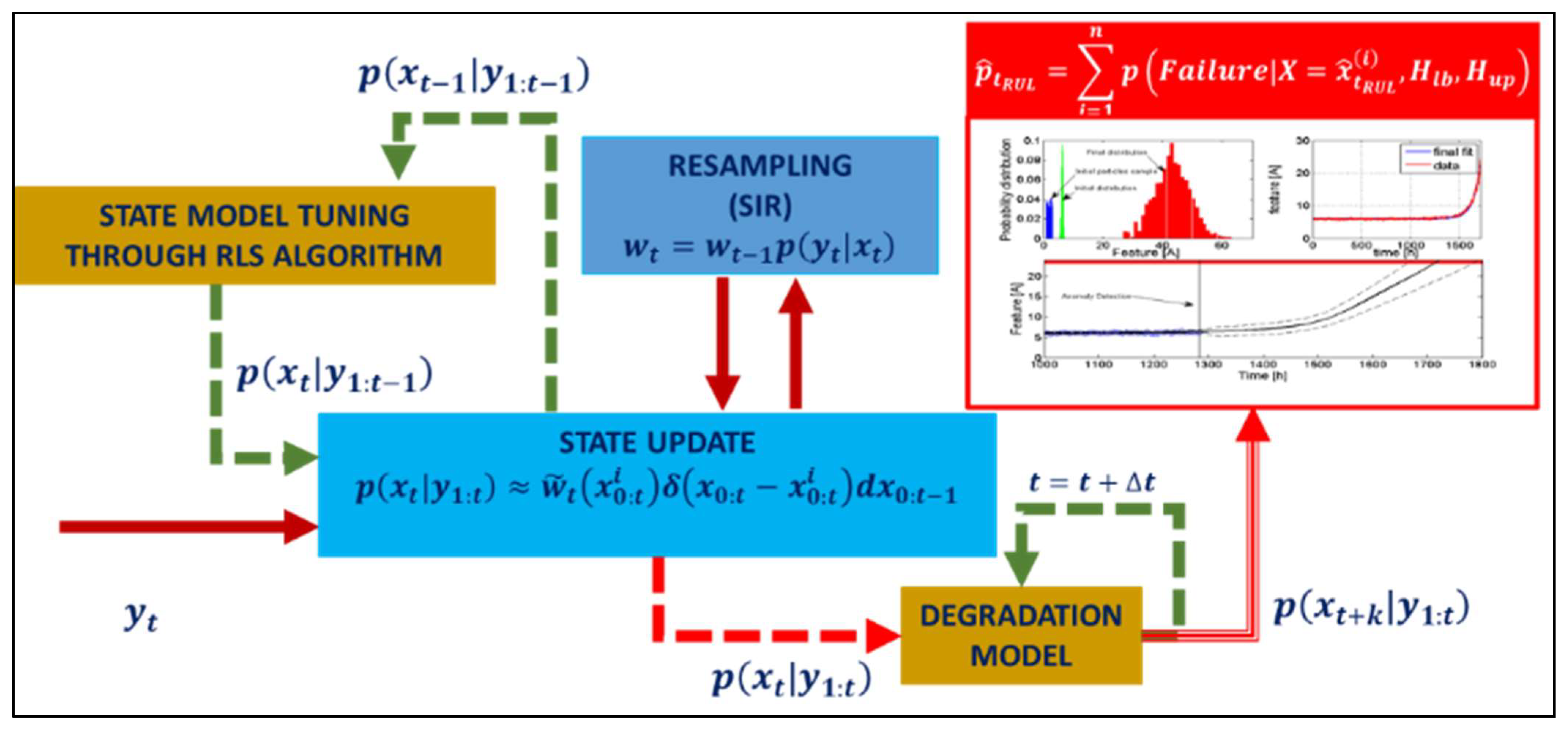
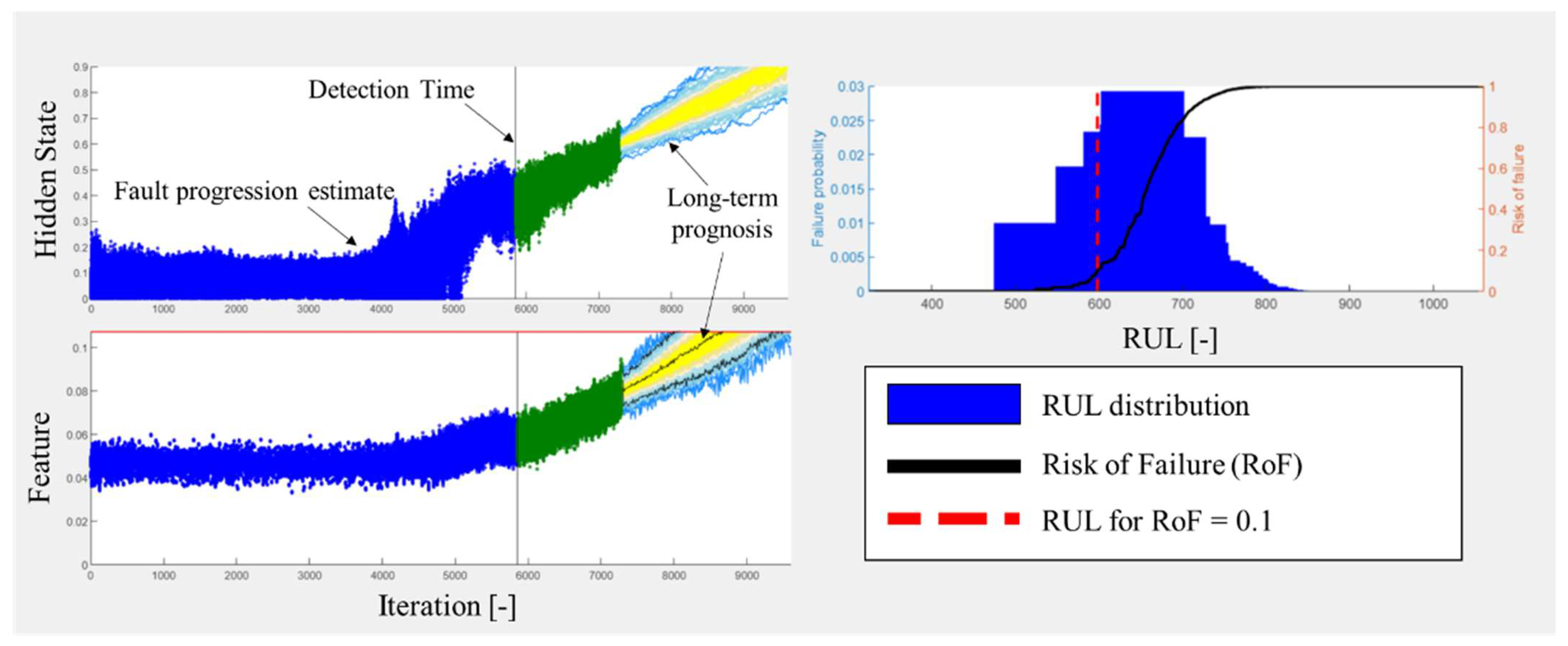
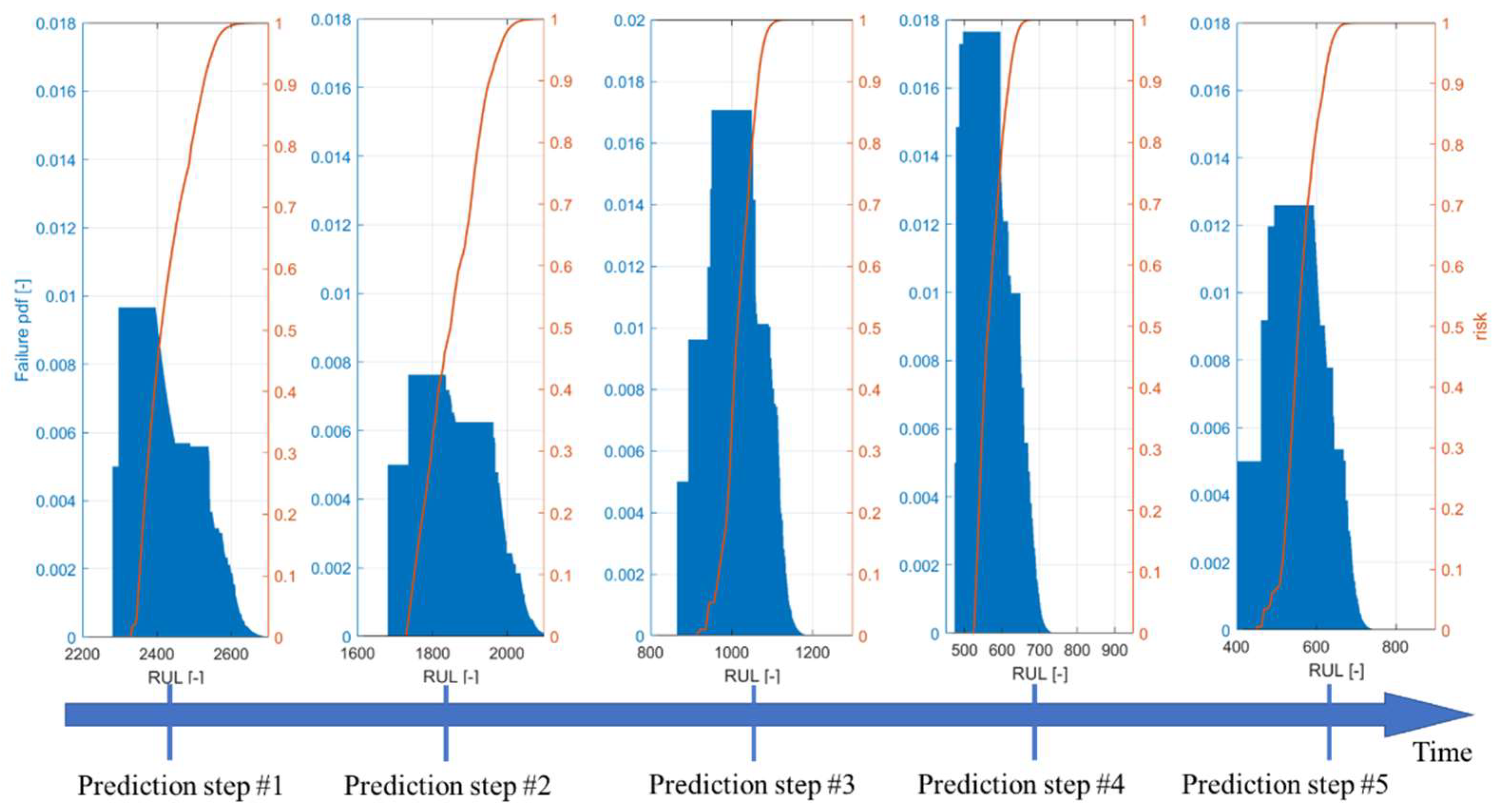
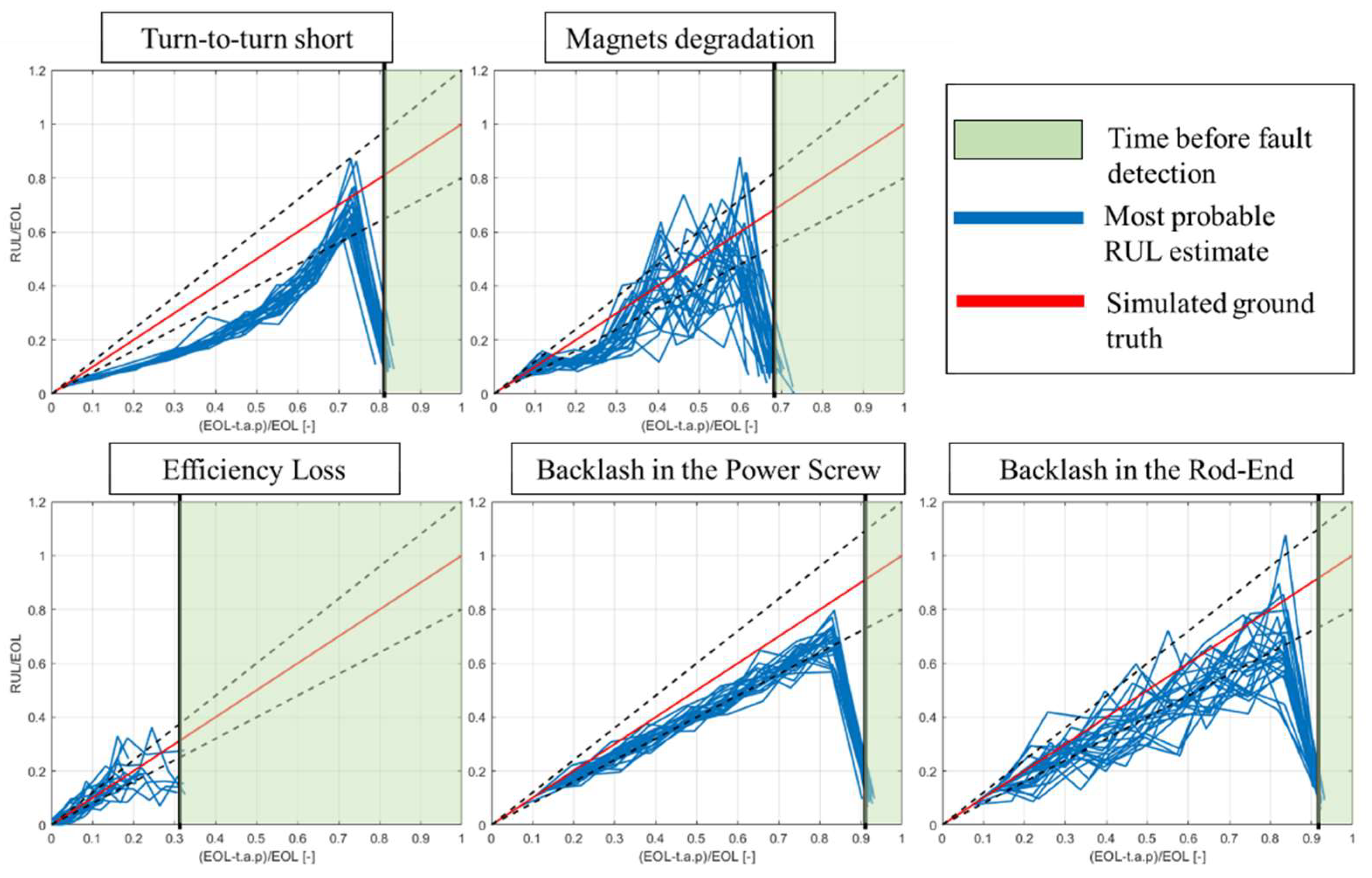
5.2.2. Failure Prognosis
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vachtsevanos, G.; Lewis, F.; Roemer, M.; Hess, A.; Wu, B. Intelligent Fault Diagnosis and Prognosis for Engineering Systems; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2006; ISBN 9780470117842. [Google Scholar]
- Brown, D.W.; Georgoulas, G.; Bole, B.M. Prognostics Enhanced Reconfigurable Control of Electro-Mechanical Actuators. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, PHM 2009, San Diego, CA, USA, 27 September–1 October 2009. [Google Scholar]
- Balchanos, M.; Mavris, D.; Brown, D.W.; Georgoulas, G.; Vachtsevanos, G. Incipient failure detection: A particle filtering approach with application to actuator systems. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017; pp. 64–69. [Google Scholar] [CrossRef]
- Ismail, M.A.; Windelberg, J.; Bierig, A.; Spangenberg, H. A potential study of prognostic-based maintenance for primary flight control electro-mechanical actuators. In Proceedings of the Recent Advances in Aerospace Actuation Systems and Components, Toulouse, France, 16–18 March 2016; pp. 193–200. [Google Scholar]
- Dalla Vedova, M.D.L.; Germanà, A.; Berri, P.C.; Maggiore, P. Model-Based Fault Detection and Identification for Prognostics of Electromechanical Actuators Using Genetic Algorithms. Aerospace 2019, 6, 94. [Google Scholar] [CrossRef] [Green Version]
- Autin, S.; De Martin, A.; Jacazio, G.; Socheleau, J.; Vachtsevanos, G. Results of a Feasibility Study of a Prognostic System for Electro-Hydraulic Flight Control Actuators. Int. J. Progn. Health Manag. 2020, 12, 1–18. [Google Scholar] [CrossRef]
- Balaban, E.; Saxena, A.; Narasimhan, S.; Roychoudhury, I.; Goebel, K.F.; Koopmans, M.T. Airborne electro-mechanical actuator test stand for development of prognostic health management systems. Annu. Conf. Progn. Health Manag. Soc. PHM 2010, 2. Available online: https://papers.phmsociety.org/index.php/phmconf/article/view/1804 (accessed on 25 February 2023).
- Bertolino, A.C.; De Martin, A.; Jacazio, G.; Sorli, M. A technological demonstrator for the application of PHM techniques to electro-mechanical flight control actuators. In Proceedings of the 2022 IEEE International Conference on Prognostics and Health Management (ICPHM), Detroit, MI, USA, 6–8 June 2022; pp. 70–76. [Google Scholar] [CrossRef]
- Li, D.; Lin, M.; Tian, L. Design of iron bird for a regional jet aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 234, 681–688. [Google Scholar] [CrossRef]
- Spangenberg, H.; Friehmelt, H. Hardware-in-the-loop simulation with flight control actuators. In Proceedings of the Collection of Technical Papers—AIAA Modeling and Simulation Technologies Conference 2005, Grapevine, TX, USA, 9–13 January 2017; Volume 1, pp. 614–622. [Google Scholar]
- Blasi, L.; Borrelli, M.; D’amato, E.; Di Grazia, L.E.; Mattei, M.; Notaro, I. Modeling and control of a modular iron bird. Aerospace 2021, 8, 39. [Google Scholar] [CrossRef]
- Jensen, S.C.; Jenney, G.D.; Dawson, D. Flight test experience with an electromechanical actuator on the F-18 Systems Research Aircraft. In Proceedings of the 19th DASC. 19th Digital Avionics Systems Conference, Philadelphia, PA, USA, 7–13 October 2000. [Google Scholar] [CrossRef]
- Malisani, S.; Capello, E.; Guglieri, G. Development of a flight mechanics simulation computer based on a flexible aircraft model for a regional aircraft. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1024, 012066. [Google Scholar] [CrossRef]
- Chiavaroli, P.; De Martin, A.; Evangelista, G.; Jacazio, G.; Sorli, M. Real Time Loading Test Rig for Flight Control Actuators Under PHM Experimentation. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Proceedings (IMECE), Pittsburgh, PA, USA, 9–15 November 2018; Volume 1, p. V001T03A032. [Google Scholar] [CrossRef]
- SAE-AIR8012; Prognostics and Health Management Guidelines for Electro-Mechanical Actuators. HM-1 Integrated Vehicle Health Management Committee, 2020. Available online: https://saemobilus.sae.org/content/air8012 (accessed on 25 February 2023). [CrossRef]
- De Martin, A.; Jacazio, G.; Vachtsevanos, G. Windings Fault Detection and Prognosis in Electro-Mechanical Flight Control Actuators Operating in Active-Active Configuration. Int. J. Progn. Health Manag. 2017, 8, 1–13. [Google Scholar] [CrossRef]
- Moosavi, S.S.; Djerdir, A.; Amirat, Y.A.; Khaburi, D.A. Demagnetization fault investigation in permanent magnet synchronous motor. In Proceedings of the 5th Annual International Power Electronics, Drive Systems and Technologies Conference (PEDSTC 2014), Tehran, Iran, 5–6 February 2014; pp. 617–623. [Google Scholar] [CrossRef]
- Wang, C.; Delgado Prieto, M.; Romeral, L.; Chen, Z.; Blaabjerg, F.; Liu, X. Detection of Partial Demagnetization Fault in PMSMs Operating under Nonstationary Conditions. IEEE Trans. Magn. 2016, 52, 1–4. [Google Scholar] [CrossRef] [Green Version]
- Kastha, D.; Bose, B.K. Investigation of fault modes of voltage-fed inverter system for induction motor drive. In Proceedings of the Conference Record of the 1992 IEEE Industry Applications Society Annual Meeting, Houston, TX, USA, 4–9 October 1992; pp. 858–866. [Google Scholar] [CrossRef]
- Khanniche, M.S.; Mamat-Ibrahim, M.R. Fault Detection and Diagnosis of 3-Phase Inverter System. Rev. Energ. Ren. Power Eng. 2001, 1, 69–75. [Google Scholar]
- Bertolino, A.C.; De Martin, A.; Fasiello, F.; Mauro, S.; Sorli, M. A simulation study on the effect of lubricant ageing on ball screws behaviour. In Proceedings of the 2022 International Conference on Electrical, Computer, Communications and Mechatronics Engineering (ICECCME), Maldives, Maldives, 16–18 November 2022; pp. 16–18. [Google Scholar]
- García-Martínez, M.; García de Blas Villanueva, F.J.; Valles González, M.P.; Pastor Muro, A. Failure analysis of the rod-end bearing of an actuating cylinder. Eng. Fail. Anal. 2019, 104, 292–299. [Google Scholar] [CrossRef]
- Xiao, X.; Chen, C.M.; Zhang, M. Magnet Demagnetization Observation for Permanent Magnet Synchronous Motor. In Proceedings of the 2008 International Conference on Electrical Machines and Systems, Wuhan, China, 17–20 October 2008; pp. 3216–3219. [Google Scholar]
- Belmonte, D.; Vedova, M.; Maggiore, P. Electromechanical servomechanisms affected by motor static eccentricity: Proposal of fault evaluation algorithm based on spectral analysis techniques. In Safety and Reliability of Complex Engineered Systems, Proceedings of the 25th European Safety and Reliability Conference, ESREL 2015; CRC Press: Boca Raton, FL, USA, 2015; pp. 2365–2372. [Google Scholar]
- Di Rito, G.; Schettini, F.; Galatolo, R. Model-based prognostic health-management algorithms for the freeplay identification in electromechanical flight control actuators. In Proceedings of the 2018 5th IEEE International Workshop on Metrology for AeroSpace (MetroAeroSpace), Rome, Italy, 20–22 June 2018; pp. 340–345. [Google Scholar] [CrossRef]
- Candon, M.; Levinski, O.; Ogawa, H.; Carrese, R.; Marzocca, P. A nonlinear signal processing framework for rapid identification and diagnosis of structural freeplay. Mech. Syst. Signal Process. 2022, 163, 107999. [Google Scholar] [CrossRef]
- Mohan, N.; Undeland, T.M.; Robbins, W.P. Power Electronics, 3rd ed.; John Wiley and Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Gökdere, L.U.; Bogdanov, A.; Chiu, S.L.; Keller, K.J.; Vian, J. Adaptive control of actuator lifetime. In Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2006. [Google Scholar] [CrossRef]
- Antoine, J.-F.; Visa, C.; Sauvey, C.; Abba, G. Approximate Analytical Model for Hertzian Elliptical Contact Problems. J. Tribol. 2006, 128, 660. [Google Scholar] [CrossRef]
- Lugt, P.M. Grease Lubrication in Rolling Bearings; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2013; ISBN 9781118353912. [Google Scholar]
- Stachowiak, G.W.; Batchelor, A.W. Engineering Tribology, 4th ed.; Elsevier: Amsterdam, The Netherlands, 2014; ISBN 978-0-12-397047-3. [Google Scholar]
- Nijenbanning, G.; Venner, C.H.; Moes, H. Film thickness in elastohydrodynamically contacts. Wear 1994, 176, 217–229. [Google Scholar] [CrossRef] [Green Version]
- Bertolino, A.C.; Mauro, S.; Jacazio, G.; Sorli, M. Multibody dynamic model of a double nut preloaded ball screw mechanism with lubrication. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Proceedings (IMECE), Virtual, 1–5 November 2021; Volume 7B-2020. [Google Scholar]
- Balan, M.R.D.; Stamate, V.C.; Houpert, L.; Olaru, D.N. The influence of the lubricant viscosity on the rolling friction torque. Tribol. Int. 2014, 72, 1–12. [Google Scholar] [CrossRef]
- Zhou, H.X.; Zhou, C.G.; Feng, H.T.; Ou, Y. Theoretical and experimental analysis of the preload degradation of double-nut ball screws. Precis. Eng. 2020, 65, 72–90. [Google Scholar] [CrossRef]
- Bertolino, A.C.; Jacazio, G.; Mauro, S.; Sorli, M. Investigation on the ball screws no-load drag torque in presence of lubrication through MBD simulations. Mech. Mach. Theory 2021, 161, 104328. [Google Scholar] [CrossRef]
- Damiens, B.; Venner, C.H.; Cann, P.M.E.; Lubrecht, A.A. Starved Lubrication of Elliptical EHD Contacts. J. Tribol. 2004, 126, 105. [Google Scholar] [CrossRef]
- Van Zoelen, M.T.; Venner, C.H.; Lugt, P.M. Prediction of film thickness decay in starved elasto-hydrodynamically lubricated contacts using a thin layer flow model. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2009, 223, 541–552. [Google Scholar] [CrossRef]
- Zhou, Y.; Bosman, R.; Lugt, P.M. A Model for Shear Degradation of Lithium Soap Grease at Ambient Temperature. Tribol. Trans. 2018, 61, 61–70. [Google Scholar] [CrossRef] [Green Version]
- Bacci, A.; Bertolino, A.C.; De Martin, A.; Sorli, M. Multiphysics modelling of a faulty rod-end and its interaction with a flight control actuator to support PHM activities. In Proceedings of the IMECE 2021 Volume 7: Dynamics, Vibration, and Control, Virtual, 1–5 November 2021. [Google Scholar]
- Orchard, M.E.; Vachtsevanos, G.J. A particle-filtering approach for on-line fault diagnosis and failure prognosis. Trans. Inst. Meas. Control 2009, 31, 221–246. [Google Scholar] [CrossRef]
- Roemer, M.J.; Byington, C.S.; Kacprzynski, G.J.; Vachtsevanos, G.; Goebel, K. Prognostics. In System Health Management: With Aerospace Applications; Wiley: Hoboken, NJ, USA, 2011; ISBN 9780470741337. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A Tutorial on Particle Filters for Online Nonlinear/NonGaussian Bayesian Tracking. IEEE Trans. Signal Process. 2002, 50, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Acuña, D.E.; Orchard, M.E. Particle-filtering-based failure prognosis via sigma-points: Application to Lithium-Ion battery State-of-Charge monitoring. Mech. Syst. Signal Process. 2017, 85, 827–848. [Google Scholar] [CrossRef]
- Acuña, D.E.; Orchard, M.E. A theoretically rigorous approach to failure prognosis. In Proceedings of the 10th Annual Conference of the Prognostics and Health Management Society 2018 (PHM18), Philadelphia, PA, USA, 24–27 September 2018. [Google Scholar]
- Bishop, C.M. Pattern Recoginiton and Machine Learning; Springer: Berlin/Heidelberg, Germany, 2006; ISBN 978-0-387-31073-2. [Google Scholar]
- De Martin, A.; Jacazio, G.; Sorli, M. Enhanced Particle Filter framework for improved prognosis of electro-mechanical flight controls actuators. In Proceedings of the PHM Society European Conference, PHME 2018, Utrecht, The Netherlands, 3–6 July 2018; Volume 4. [Google Scholar]
- Saxena, A.; Celaya, J.; Balaban, E.; Goebel, K.; Saha, B.; Saha, S.; Schwabacher, M. Metrics for evaluating performance of prognostic techniques. In Proceedings of the 2008 International Conference on Prognostics and Health Management, Denver, CO, USA, 6–9 October 2008; pp. 1–17. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Failure Mode | Feature Symbol | Signals | Feature |
|---|---|---|---|---|
| Motor | Turn-to-turn short | Phase currents Phase voltage | Variance of the common node current over the average phase voltage | |
| Motor | Magnets degradation | Phase currents | Distance between the mean root square of the phase currents from an expected baseline | |
| Motor | Static eccentricity | Phase currents Motor shaft position | Periodic disturbances over the phase currents signals | |
| EPU | MOSFET Base Drive Open Circuit | Phase voltage | Phase voltage standard deviation | |
| Mechanical transmission | Efficiency loss, lubricant aging | Phase currents Expected aerodynamic load based on deflection angle | Efficiency estimate at still actuator | |
| Mechanical transmission | Wear induced backlash | Rotor shaft position LVDT measurement | Difference between LVDT output and shaft position | |
| Spherical joints | Wear-induced backlash | LVDT measurement from 2 actuators on the same aerodynamic tab | Difference between LVDT outputs |
| Component | Failure Mode | Prognostic Horizon [−] | Relative Accuracy [%] |
|---|---|---|---|
| Motor | Turn-to-turn short | 0.11 | 64.3% |
| Motor | Magnet degradation | 0.55 | 75.3% |
| Mechanical transmission | Efficiency loss, lubricant aging | 0.15 | 78.2% |
| Mechanical transmission | Wear-induced backlash | 0.82 | 81.2% |
| Spherical joints | Wear-induced backlash | 0.65 | 79.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bertolino, A.C.; De Martin, A.; Jacazio, G.; Sorli, M. Design and Preliminary Performance Assessment of a PHM System for Electromechanical Flight Control Actuators. Aerospace 2023, 10, 335. https://doi.org/10.3390/aerospace10040335
Bertolino AC, De Martin A, Jacazio G, Sorli M. Design and Preliminary Performance Assessment of a PHM System for Electromechanical Flight Control Actuators. Aerospace. 2023; 10(4):335. https://doi.org/10.3390/aerospace10040335
Chicago/Turabian StyleBertolino, Antonio Carlo, Andrea De Martin, Giovanni Jacazio, and Massimo Sorli. 2023. "Design and Preliminary Performance Assessment of a PHM System for Electromechanical Flight Control Actuators" Aerospace 10, no. 4: 335. https://doi.org/10.3390/aerospace10040335