1. Introduction
To meet the growing need, while keeping the devastating impact on the environment to minimum, the aviation industry is currently facing a plethora of challenges [
1,
2]. The research and production of green aircraft [
1,
3,
4] are the logical outcomes and trends in compliance with the IATA legal requirements outlined in the technology roadmap set for future aircraft design [
5,
6]. Due to the inherent characteristics of reducing fuel consumption, morphing wing technology is regarded as an active research area towards environmentally friendly aircraft. In fact, it has been shown by Barbarino et al. [
7] that approximately 3 to 5 percent fuel saving can be achieved through morphing wing aircraft.
Although still in the rudimentary stage, morphing wings offer adaptability during different flight phases and gust conditions. Morphing wings’ adaptability can be classified into two major categories: in-plane transformation (including sweep, span-wise expansion/contraction, and chord length variation) and out-of-plane transformation (dihedral/gull, twist, and span-wise bending). Span-wise morphing and sweep change the wing aspect ratio and thereby change the lift distribution and lift-to-drag ratio. The enhancement of the lift-to-drag ratio improves the range and endurance of the aircraft [
8]. Furthermore, the sweep alters the longitudinal and lateral stability of the wing due to the relocation of the aerodynamic and gravity centres [
9]. Dihedral morphing alters rolling stability. It can provide better agility, reduction in induced drag, and an improvement in stall characteristics [
7]. It is widely accepted and agreed that hinged devices, such as flaps, ailerons, and slats are not considered morphing devices. In addition to the wing morphing described above, there is continuous extensive active research in the area of airfoil morphing. Chen et al. [
10] designed and successfully implemented the control laws on a tensegrity morphing airfoil. However, their work is limited to the kinematic analysis and no dynamic analysis was presented. Interested readers are referred to the review papers published by Barbarino et al. [
7], Ameduri and Concilio [
11], Ajaj et al. [
12], and Dhara et al. [
13] for the structural and shape-changing morphing concepts applied to both fixed and rotary wing aircraft with special consideration of active systems, challenges and current issues related to morphing wing technology application, aeroelastic stability and control effects on the morphing wings of fixed-wing aircraft, and the evolution of morphing wing concepts, respectively.
It is of prime importance to optimize the morphing wing for conflicting multi-objectives of weight, aerodynamics, structure, and actuation [
14]. Morphing imposes a cost on the system with the advantages they bring in.
Table 1 below briefly highlights the advantages and challenges in terms of the cost of the system. This cost is generally associated with the morphing skin requirement to adapt the morphing mechanism and aerodynamic force distribution [
15].
Most of the work on morphing wings is focused on the application and optimization of controllers and smart materials [
16,
17,
18]. Some aeroelastic analysis has also been performed on a single morphing parameter of the morphing wing [
19].
Besides bringing the above-mentioned prospects, due to the increased number of components and, therefore, more degrees of freedom, any hazard, considered here to be the damage to, or failure of beam components could lead to a drastic decline in the expected performance of the morphing wing. In the absence of any specific airworthiness certification standard for the morphing wing, designers need to exert extra effort in identifying the functional and fault hazards and their corresponding failure conditions. Damage in the function and/or components of a morphing wing may lead to drastic changes in the vibration signature of the wing for which the design was conceived and tested during the ground vibration test (GVT) for the airworthiness certification process. This would not only limit the aircraft operation in the vibration environment from aeroelastic perspectives, but could also lead to unavoidable nuisance conditions to the passengers and crew. Very limited work on the functional hazard assessment (FHA) is available on very simple winglet and aircraft design [
20,
21]. Based on the FHA and quantitative fault tree analysis on an isolated morphing winglet and the subsequent aeroelastic analysis, Noviello et al. [
20] concluded that the failure of the actuator was more critical than that of the structural link. Proper damping devices were also suggested by the authors to avoid the aeroelastic instabilities. However, no detailed modal analysis of the wing–winglet system was presented in their work. Slawomir et al. [
21] conducted FHA based on the possible failures of the structural health-monitoring system (SHM) of an unmanned aerial vehicle (UAV). Based on their presented FHA, they concluded that the failure of the SHM did not need any qualitative or quantitative analysis. Therefore, they did not present any structural and/or aeroelastic analysis of the system. To the best of authors’ knowledge, no comprehensive work on the FHA of morphing wings with regard to the system’s dynamic characteristics has been reported in the open literature. A considerable variation in the dynamic characteristics of the wing could potentially result in hazardous or even catastrophic failure conditions. Therefore, the probability of failure conditions must be determined qualitatively or quantitatively at the preliminary design stage. The scarcity of literature on FHA applied to morphing wing systems is the motivation behind the current study.
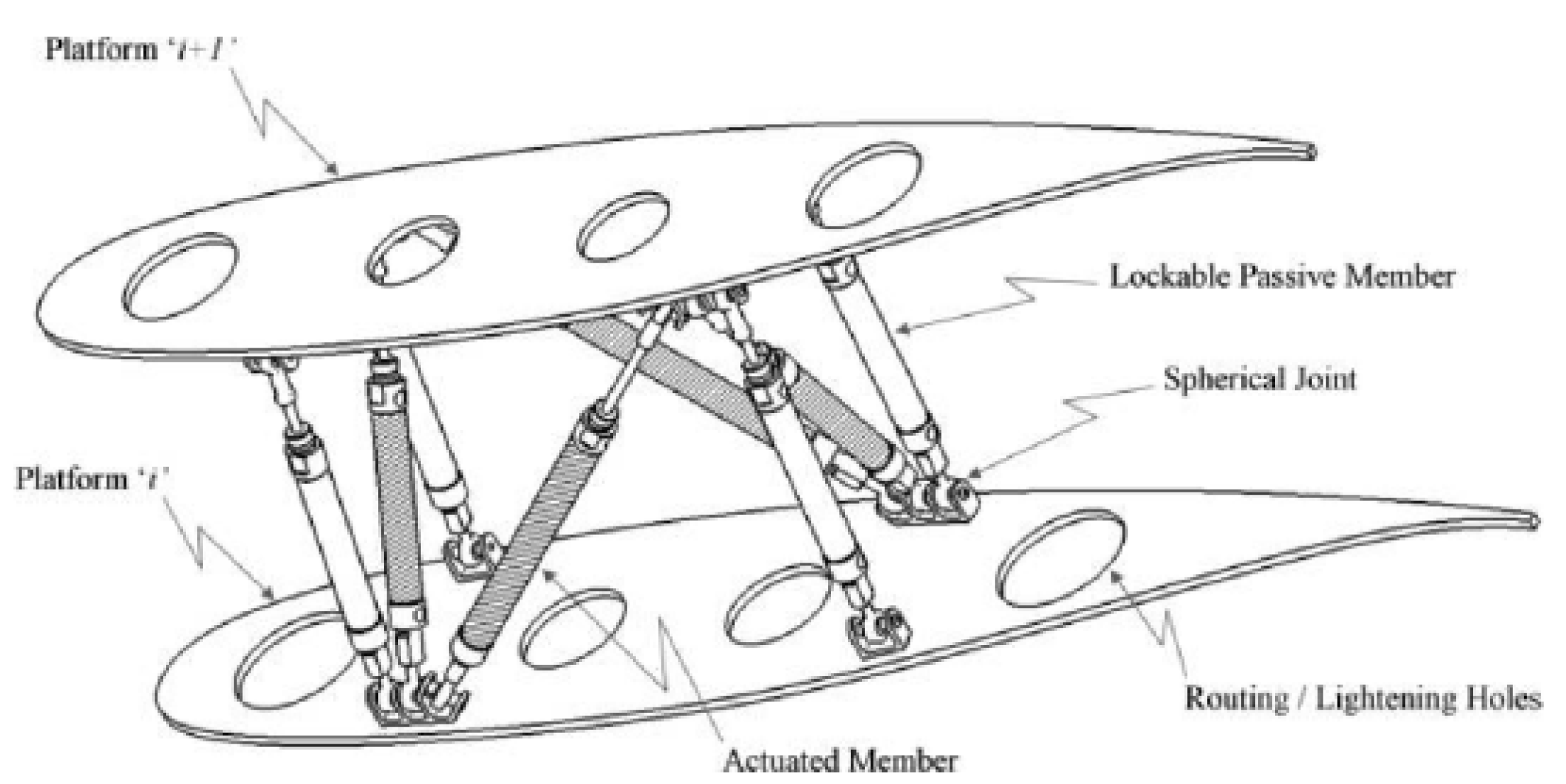
This paper presents a systematic approach to perform FHA on the preliminary design of a morphing wing, with the application to the wing conceived by Finistauri et al. [
22], followed by Moosavian et al. [
23], at the Toronto Metropolitan University (formerly Ryerson University). They successfully implemented the parallel robot manipulator concept in morphing wing design, which can adapt to span-wise, dihedral, sweep, and twist mechanisms simultaneously per the flight condition requirements. Their base design is modular in nature and the number of modules can be optimized based on mission requirements, which could eliminate the need for tedious tasks of recurring wing redesign. However, their work is limited to the kinematic-based design of the proposed morphing wing omitting any structural and/or aerodynamic analysis. In a more recent publication [
24], the authors presented the free vibration analysis of un morphed (original) and morphed configurations of the above-mentioned wing design subjected to span-wise extensions. The results of systems’ free vibration analyses were validated against those obtained from FEM-based analysis and the dynamic stiffness matrix (DSM) method. The effect of various span-wise extensions as well as topology on a system’s natural frequencies were also studied and reported. In the present paper, the authors’ earlier work [
24] has been extended to the structural dynamic analysis and qualitative FHA of the defective morphing wing. The defect is assumed to be the structural failure of the beam components and any chord length variations, sweep, out-of-plane transformations, and aerodynamic effects are excluded from the analysis.
3. Safety Assessment
Safety assessment is a comprehensive and systematic process of identifying hazards, and their classifications, establishing safety requirements, and verifying that these requirements are met to achieve a fail-safe aircraft and its systems’ design. This process runs throughout the development cycle of the aircraft. Safety assessment process is broadly divided into three stages: functional hazard assessment (FHA), preliminary system safety assessment (PSSA), and system safety assessment (SSA). FHA and PSSA are performed during the preliminary design phase of the aircraft, while SSA is executed during the detailed design phase. Therefore, PSSA generally necessitates a qualitative methodology tool, e.g., fault tree analysis (FTA). The morphing system in this work is in the preliminary design phase. Therefore, in what follows, only FHA and PSSA will be discussed further.
3.1. Functional Hazard Assessment, FHA
According to the guidelines and methods for conducting the safety assessment process on civil airborne systems and equipment, SAE-ARP4761 [
31], a system is ‘a combination of inter-related items arranged to perform a specific function(s)’. The main purpose of FHA is to identify the hazards and classify their failure conditions. Failure conditions reflect the expected impact on the aircraft system(s), aircraft, passengers, and/or crew during flight phases due to detrimental operational or environmental effects [
31]. Failure conditions are classified into four categories on the basis of the degree of their devastating impact on the aircraft safety and level of easiness to cope with them. These failure conditions, in the order of increasing degree of distress, include no safety effect (NSE), minor, major, hazardous and catastrophic. Descriptions of failure condition classifications are given in
Table 2.
Qualitative, along with quantitative, probability categories, for the purpose of the aircraft system safety, are defined in
Table 3.
According to the equipment, systems, and installation standard of transport category aircraft, 14CFR 25.1309(b) [
33], The airplane systems and associated components, considered separately and in relation to other systems, must be designed so that:
The occurrence of any failure condition which would prevent the continued safe flight and landing of the airplane is extremely improbable, and
The occurrence of any other failure conditions which would reduce the capability of the airplane or the ability of the crew to cope with adverse operating conditions is improbable’.
Therefore, a single failure causing catastrophic failure conditions must be extremely improbable. Essentially, the objectives of 14CFR 25.1309(b) are to keep the probability of the failure conditions such that [
32]:
The no safety effect has no probability requirement;
The minor failure condition may be probable;
The major failure condition must be remote;
The hazardous failure condition must be extremely remote;
The catastrophic failure condition must be extremely improbable.
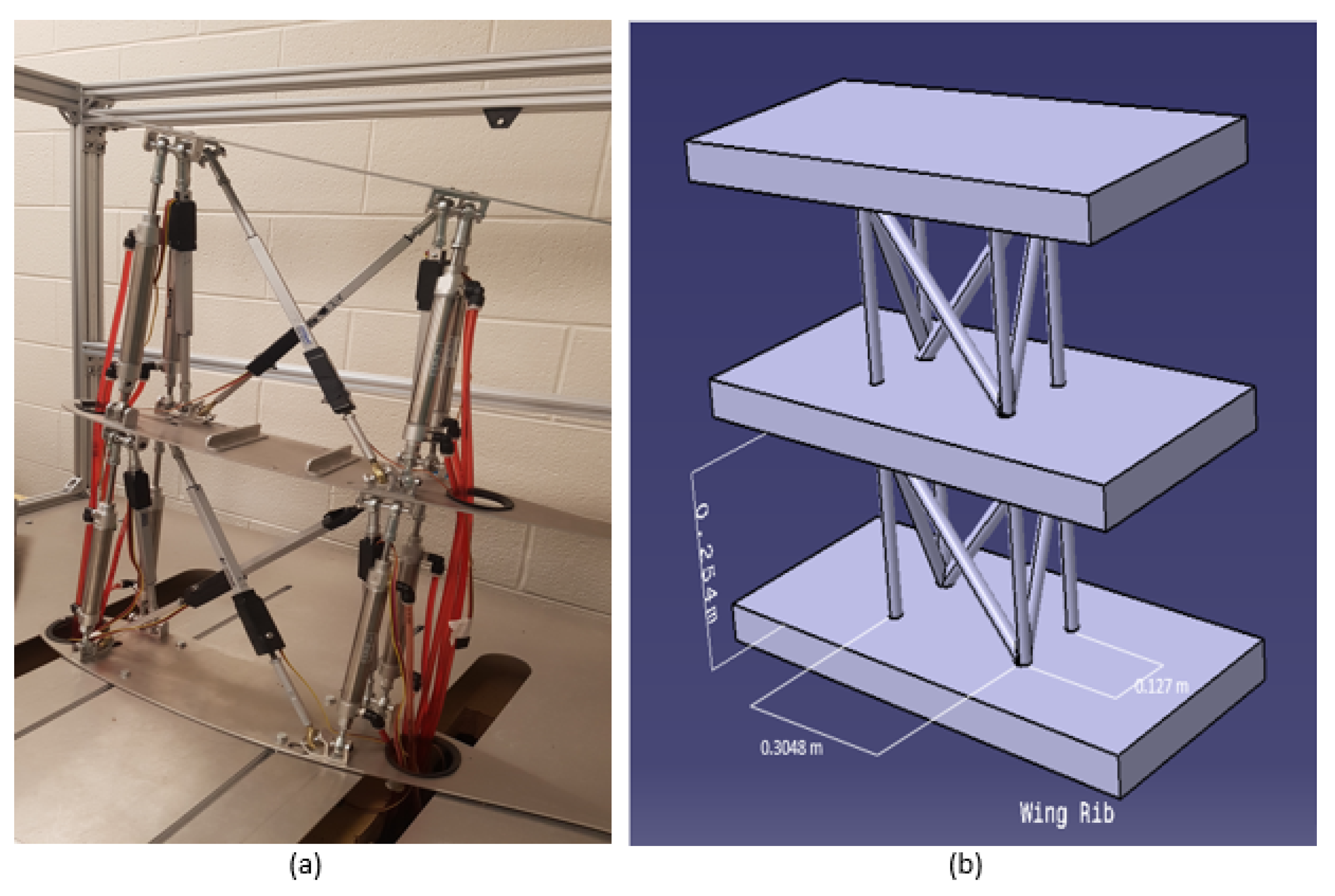
The modular morphing system presented here is a system composed of two re-configurable modules, each consisting of eight structural beams (four active and four passive) and the end ribs, each represented and modelled by a planar frame made of five rigid beams (i.e., 1000 times stiffer than the active and passive beams).
Table 4 below presents the identified hazards and their respective failure conditions for the current modular morphing wing system.
3.2. Qualitative Fault Tree Analysis, FTA
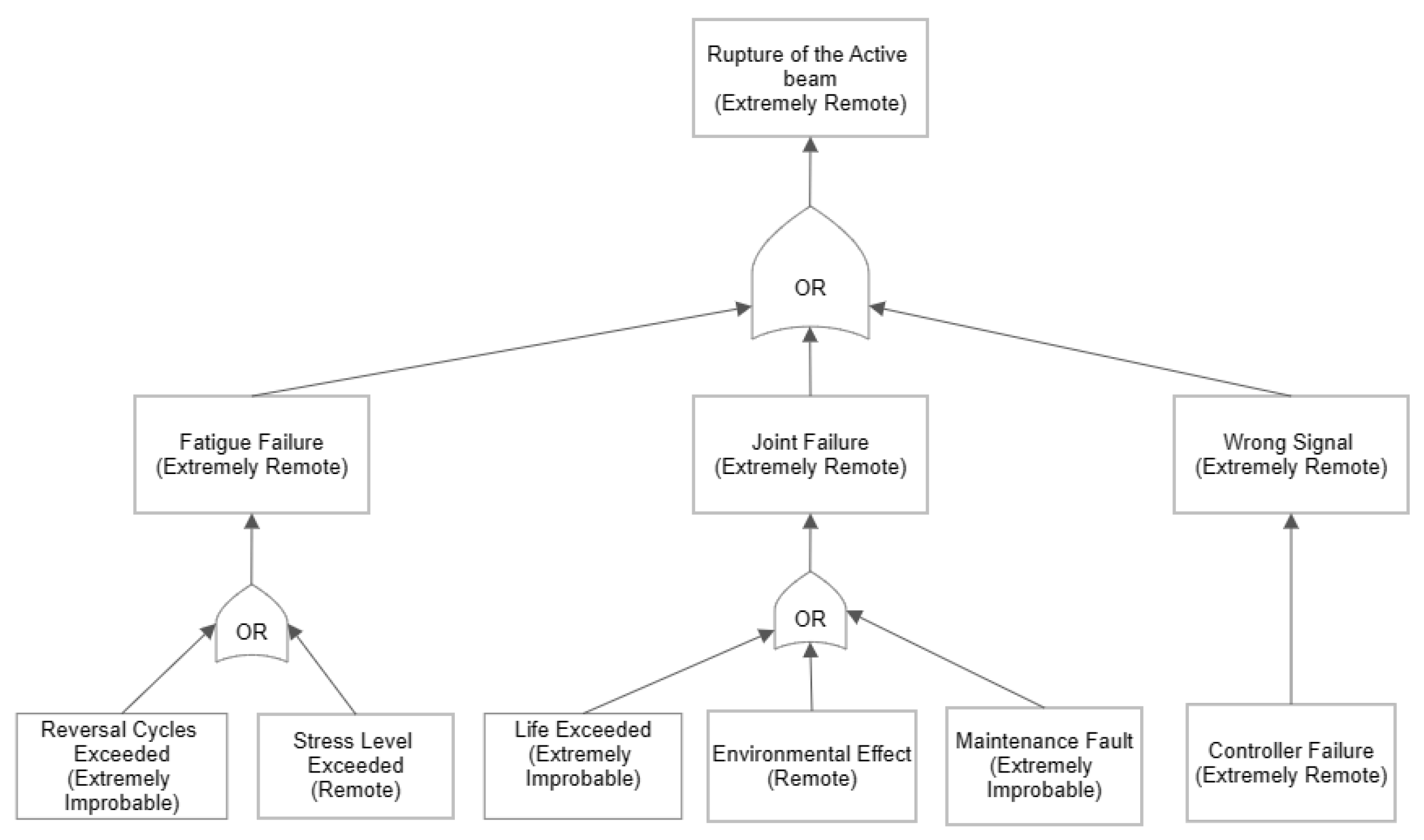
Due to the unavailability of the reliability data of the components used in the preliminary design of the current morphing wing, a qualitative fault tree analysis (FTA) has been deemed sufficient for the PSSA. Based on the results obtained through earlier simulations carried out by the authors and further discussions among the research team, it was deduced that the best suitable FTA can be presented as shown in
Figure 3. This FTA clearly shows that the hazardous failure condition (i.e., case 1 in
Table 4, active beam rupture) identified in this work is extremely remote, which is in compliance with the guidelines for safety assessment, as stated in SAE-ARP4761 [
31].
Despite the fact that the hazardous failure condition (i.e., active beam rupture, in this case) is extremely remote, it is important to investigate the effects of such an unlikely event on the vibration signature of the system at hand. Any changes in the vibration signature could, in turn, potentially make the morphing wing’s response deviate from the intended design parameters, leading to structural damage, and/or hamper control of the system. Therefore, in the following section, the FEM-based simulations and vibration analysis of intact (benchmark) and defective (both unmorphed and span-wise morphed) systems are presented.
4. FEM-Based Numerical Investigation of the Failure Condition
As mentioned earlier in the paper, the wing’s structural members are treated as Timoshenko beams, with hinged joints. The detailed procedure of the FEM-based modal analysis is described in the authors’ earlier work [
24] and has been omitted here for brevity.
As also stated before, the wing design consists of two modules: each one composed of eight structural beams and two ribs. Furthermore, each rib is modelled as a planar assembly of five rigid beams, i.e., there are 26 beams in total. Diameter of each beam in the unmorphed (benchmark) configuration is 0.0254 m (1 in). The distance between the two wing ribs, i.e., the unmorphed module length, is 0.254 m (10 in) (refer to
Figure 1). Mechanical properties of structural beams (active and passive) are given in
Table 5.
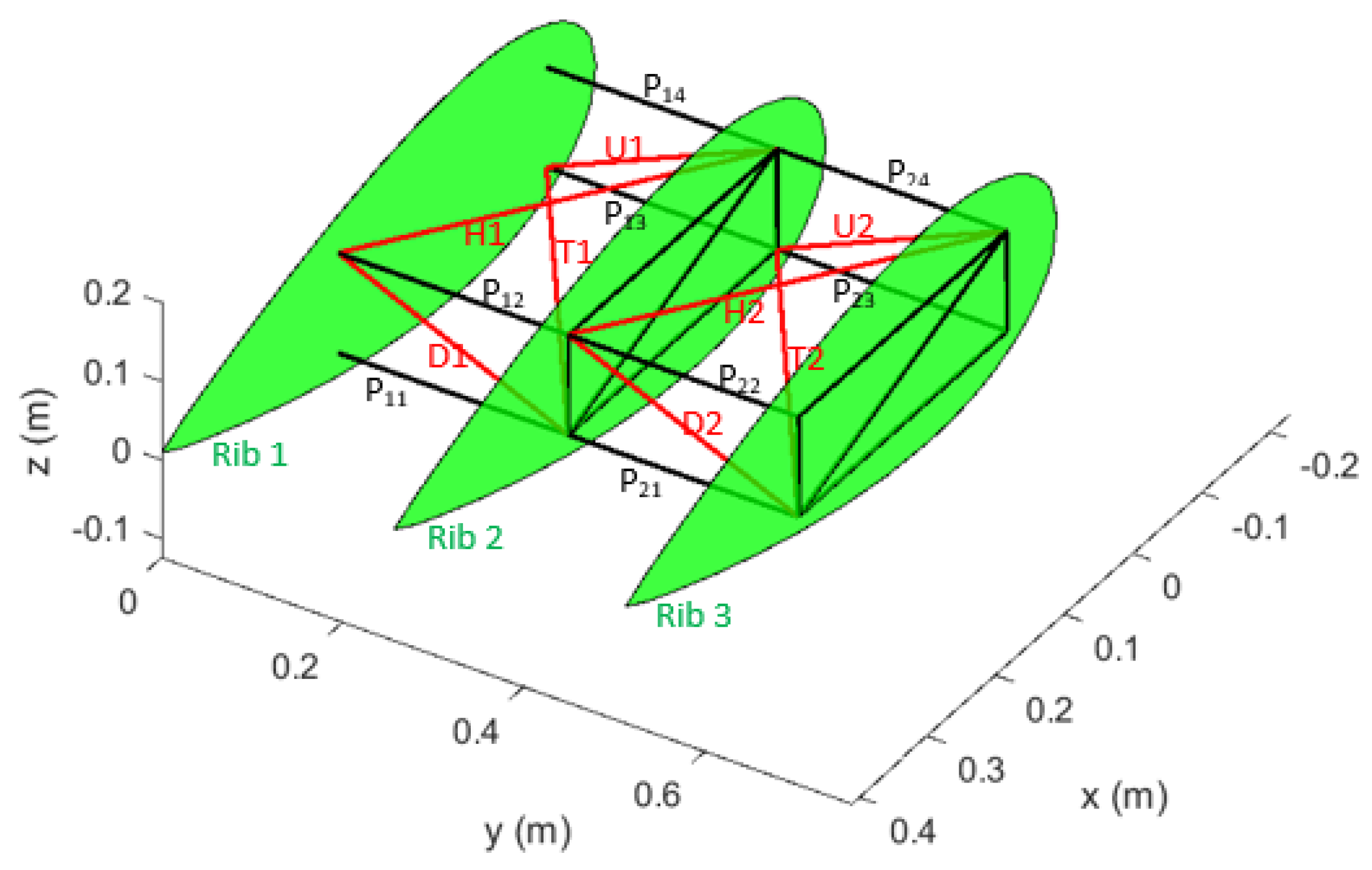
Hazards identified earlier are utilized here to investigate their respective anticipated impacts on the vibration characteristics of the morphing wing system. The four active beams per module, whose failures are identified as hazards, along with their locations are designated by symbols as presented in
Table 6, and indicated in red (refer to
Figure 4). The four passive members in each module are also depicted in
Figure 4 in black, and are designated by symbols
. Here
i and
j represent the module number and the beam number, respectively.
Each active beam, considered as factors, has two levels to represent their functional status, as given in
Table 7.
First, the benchmark case, i.e., intact system, with all the beams fully functional, in the unmorphed (original) wing configuration, is simulated for model analysis. The benchmark system’s first ten natural frequencies are given in
Table 8.
Numerical simulations and experiments are then performed on the defective wing in its unmorphed (original) configuration to study the hazard assessment. For a complete factorial design of experiments, one needs to run a total of
simulations to investigate the effects of various combinations of eight factors, with two levels each. However, by exploiting the Taguchi technique, only 12 experiments were deemed sufficient to serve the purpose and achieve the same results. The details of the Taguchi technique can be found in references [
34,
35,
36] and have been omitted here for brevity. The Taguchi orthogonal array (L12), obtained by using the designation of beams and the level identifiers as given in
Table 6 and
Table 7, is presented in
Table 9.
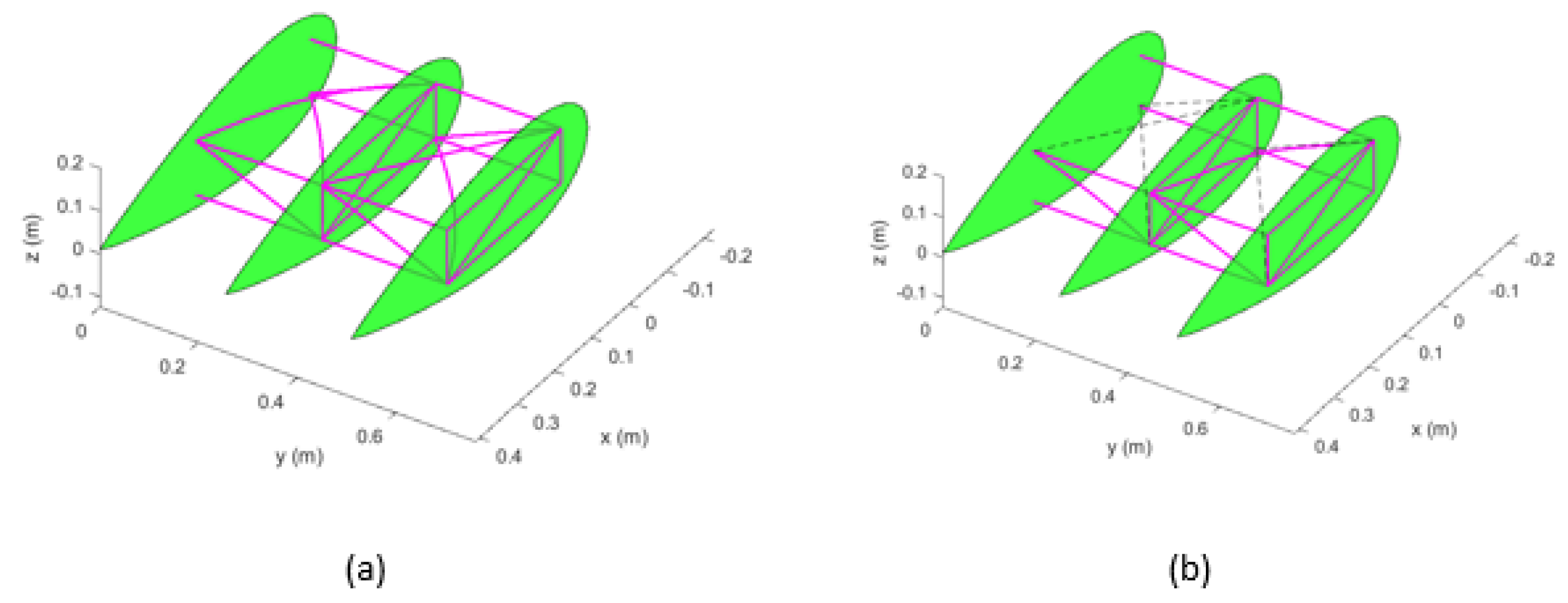
The resulting first ten natural frequencies, corresponding to the 12 experiments, are given in
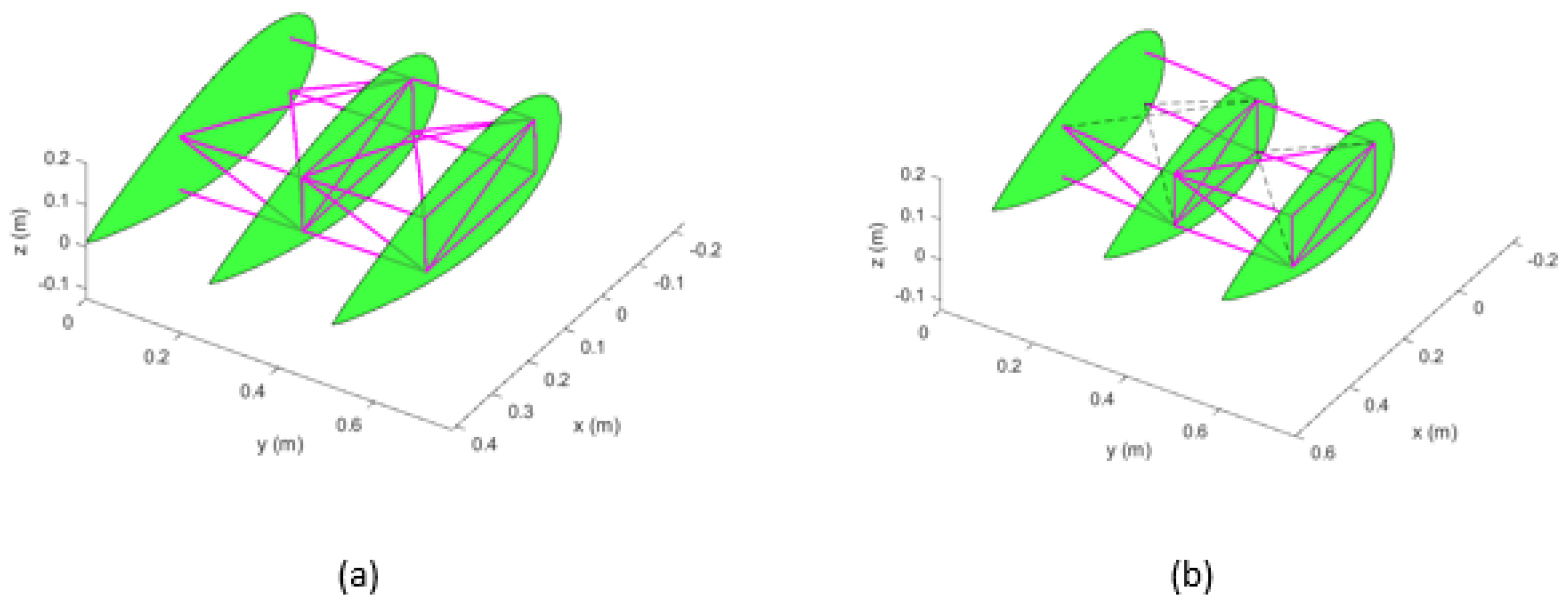
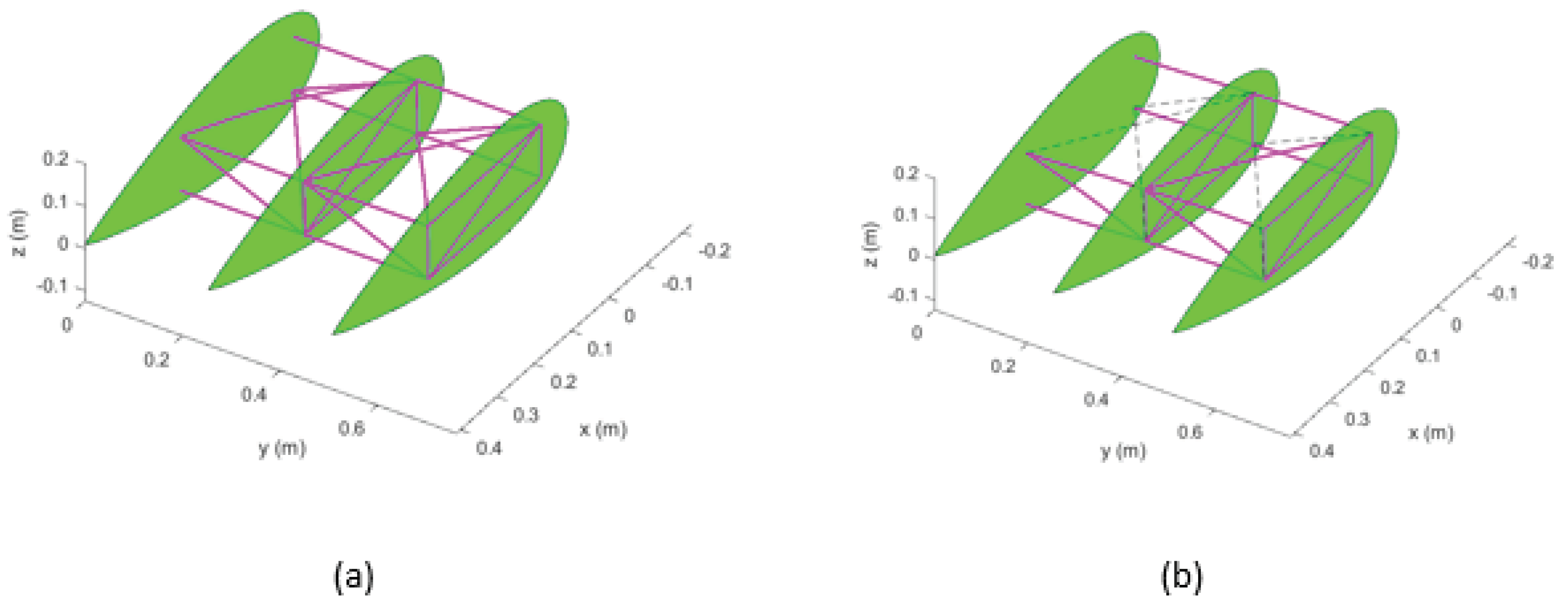
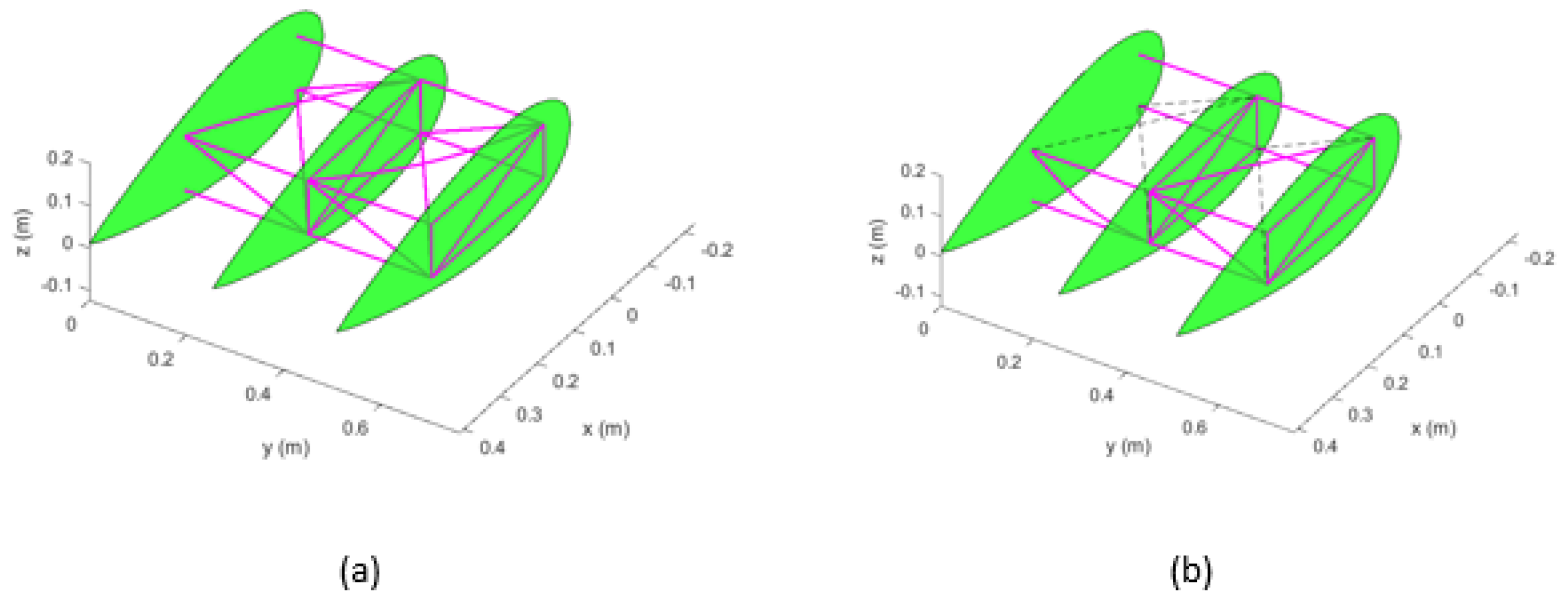
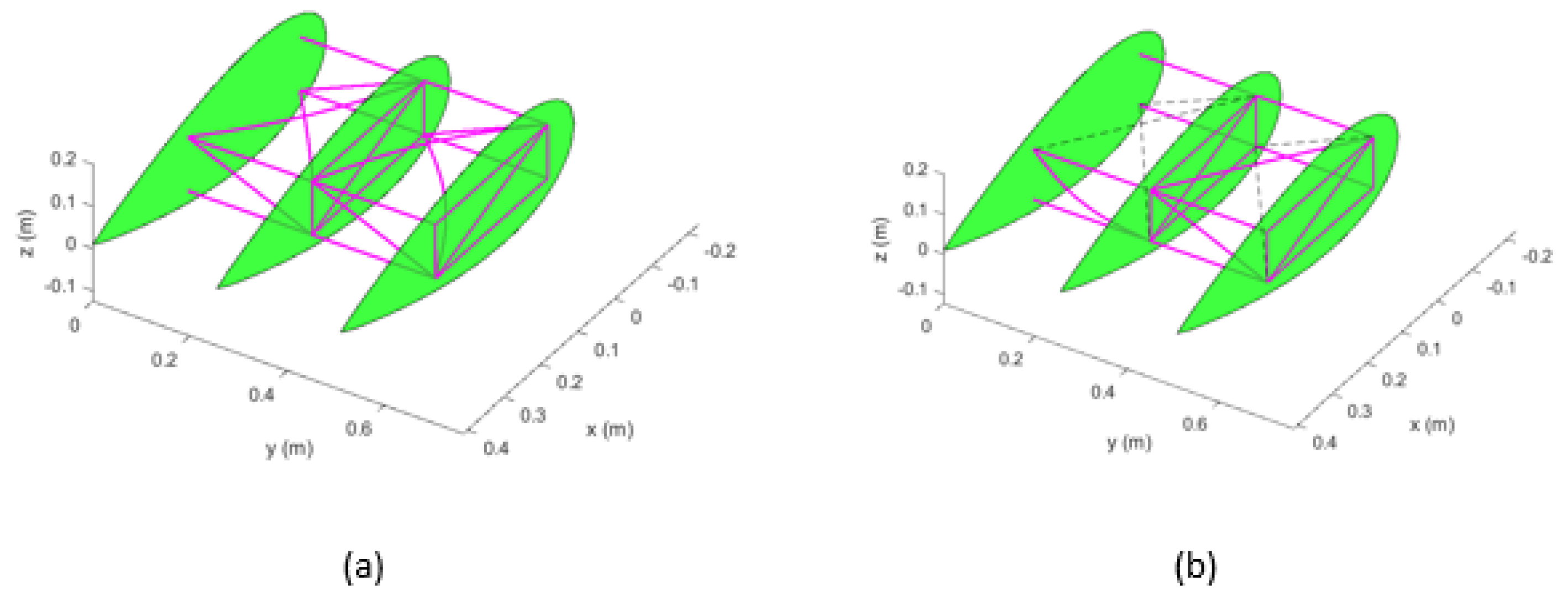
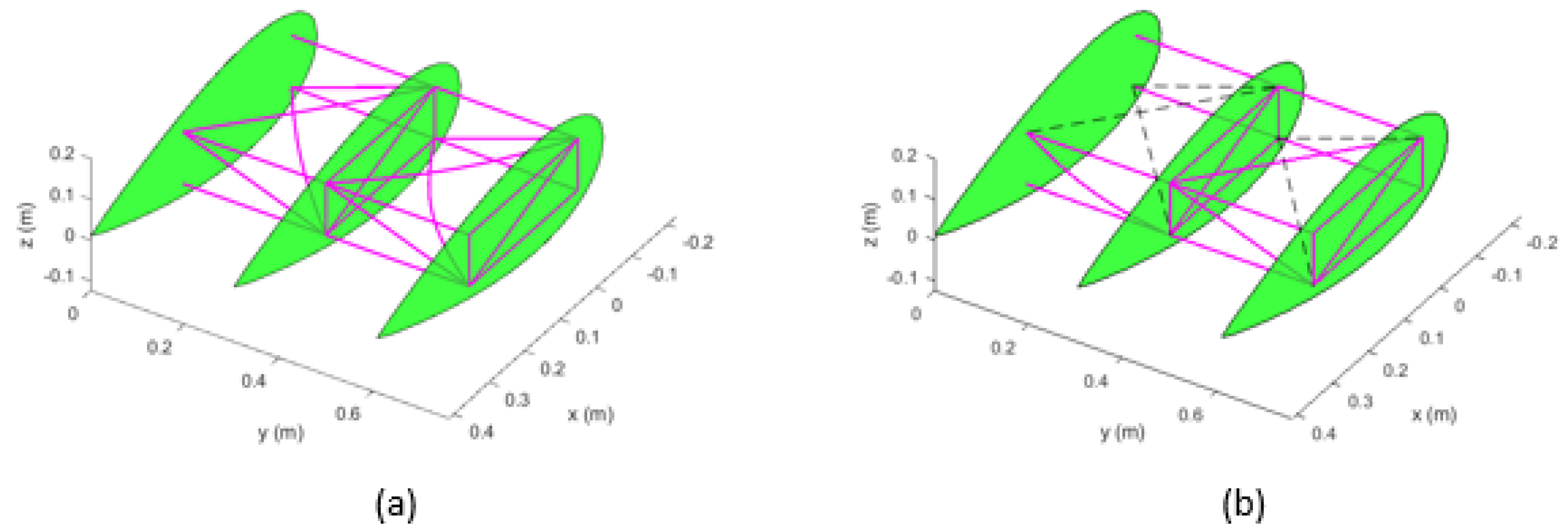
Table 10, and the corresponding mode shapes have been extracted. The first experiment, in essence, represents the fully intact system. For illustration purposes, only the first five mode shapes for experiment six, involving three ruptured active beams in the first module and two in the second one, are presented (
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9). By comparing the fundamental frequency values of the defective and intact unmorphed configurations (see
Table 8), it is found that all but the one for experiment two diminish. However, the next nine frequencies tend to exhibit an increase in their values.
It is noteworthy that in the presented simulations, the ruptured beam elements are entirely eliminated from the numerical FEM models. This practice leaves the defective system with a reduced and different mass–stiffness distribution. An increase in the natural frequencies of the defective system could be attributed to the fact that the mass and stiffness properties of the system are not affected to the same extent. In other words, the defective system undergoes more mass reduction compared to its stiffness reduction. In addition, the morphing design topology is statically indeterminate with more necessary elements. Therefore, the rupture of certain active beams may not drastically affect the overall system’s stiffness, while mass would be reduced. As can also be observed from
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9, the corresponding mode shapes change noticeably, compared to their corresponding benchmark cases. Ruptured beams are represented by black dashed lines for illustration purposes (refer to
Figure 5,
Figure 6,
Figure 7,
Figure 8 and
Figure 9). It is observed that in the case of the first mode, the damaged wing exhibits a more pronounced in-plane motion than the intact one. In the next four modes, however, the intact wing shows considerable flexural bending of the active beams compared to the corresponding mode shapes of the damaged system, see
Figure 6,
Figure 7,
Figure 8 and
Figure 9.
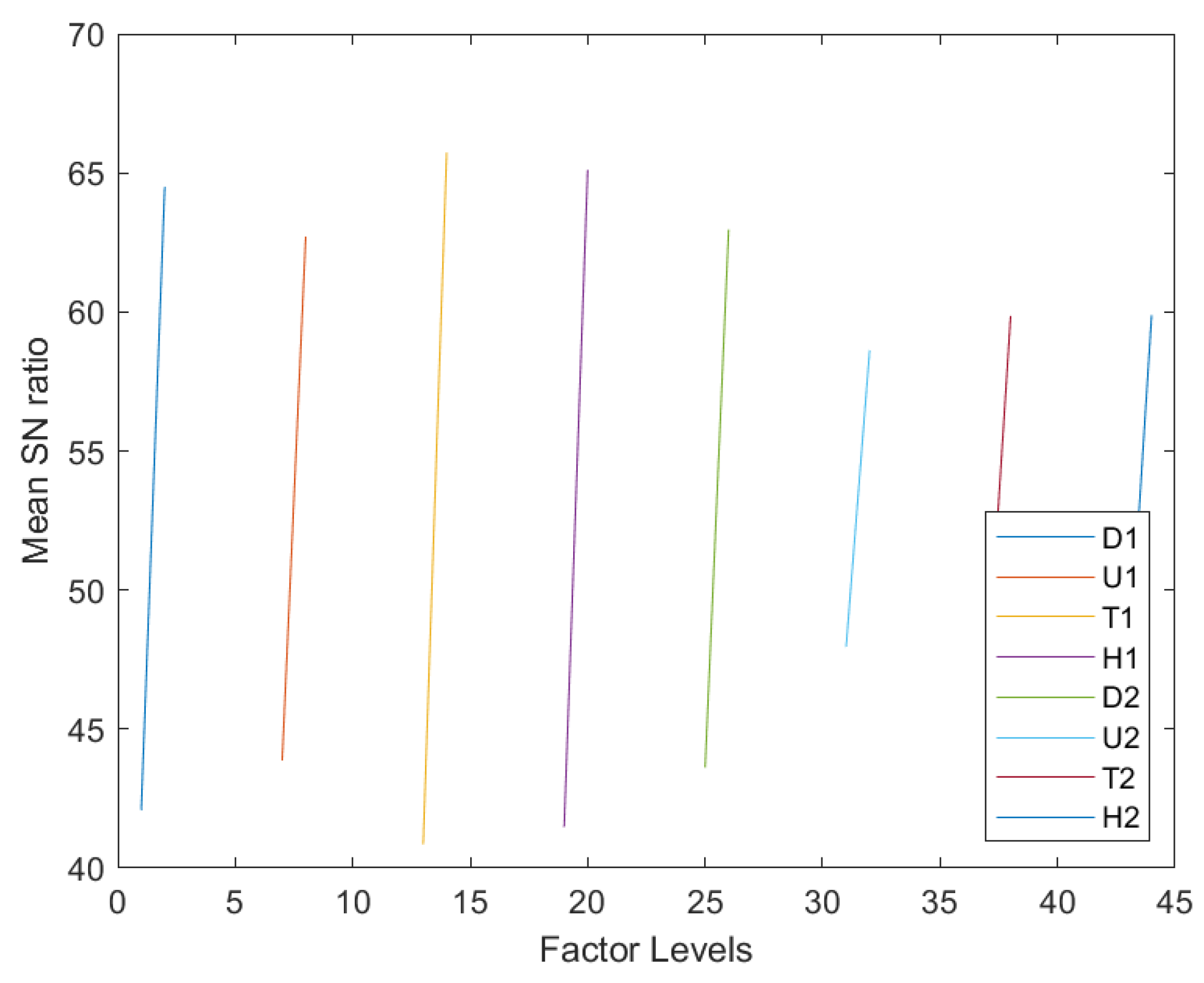
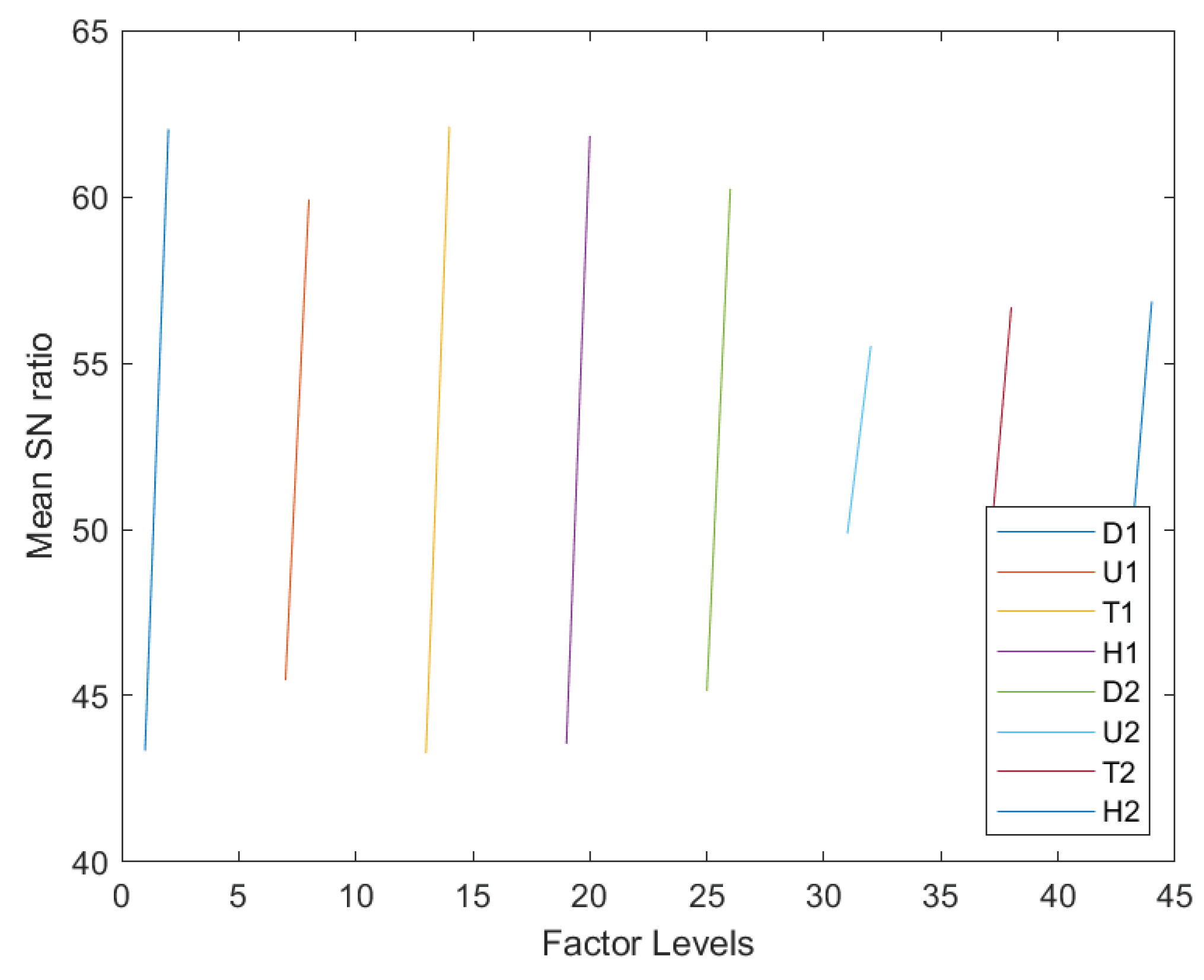
The signal-to-noise ratio (SN) [
34,
35,
36] is computed for each factor’s level to investigate its effect on changing the natural frequencies of the morphing wing compared to the benchmark natural frequencies. Here, the maximum is a better SN ratio used to investigate the difference from the corresponding benchmark natural frequencies. Following the Taguchi technique, the mean SN ratios of the eight factors with two levels each, shifted along the abscissa for visual discernibility, given in
Figure 10, for a representative case of the 4th natural frequency. By producing the SN ratios of the eight factors for all other natural frequencies, and comparing the difference between the factors’ highest and lowest mean SN, it is found that the hazards produced by the rupture of D1, T1, and H1 are the most critical governing factors in terms of transforming the vibration signature of the current re-configurable modular morphing wing.
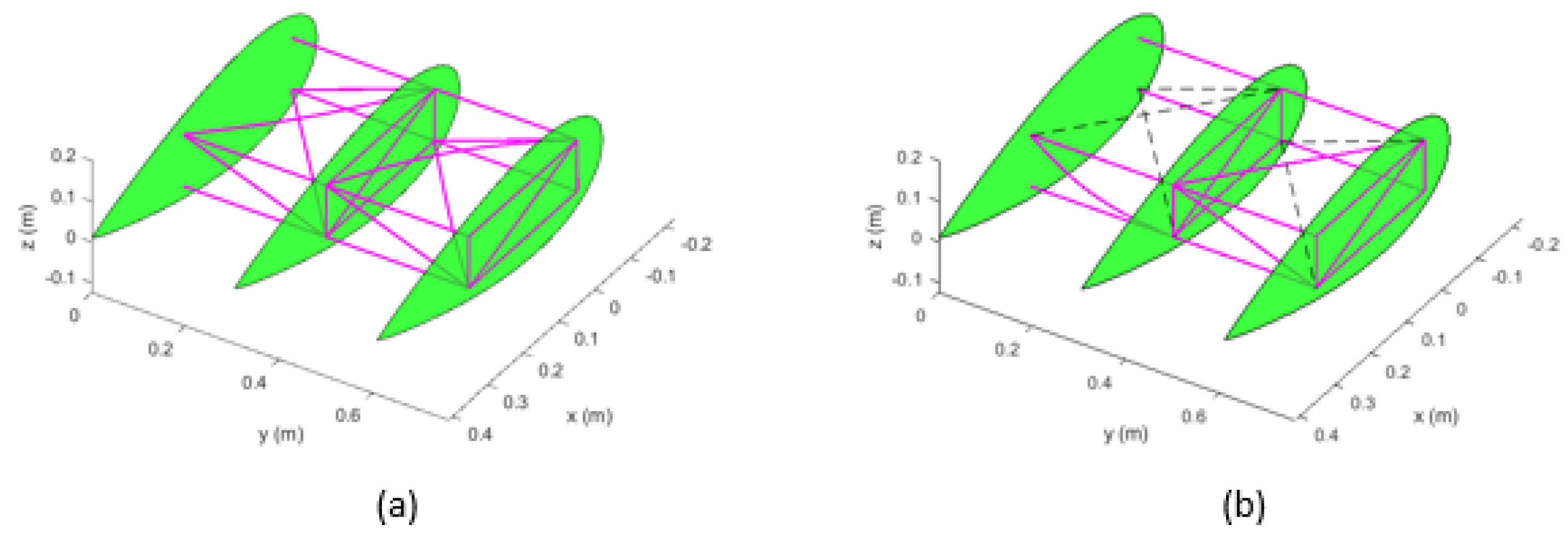
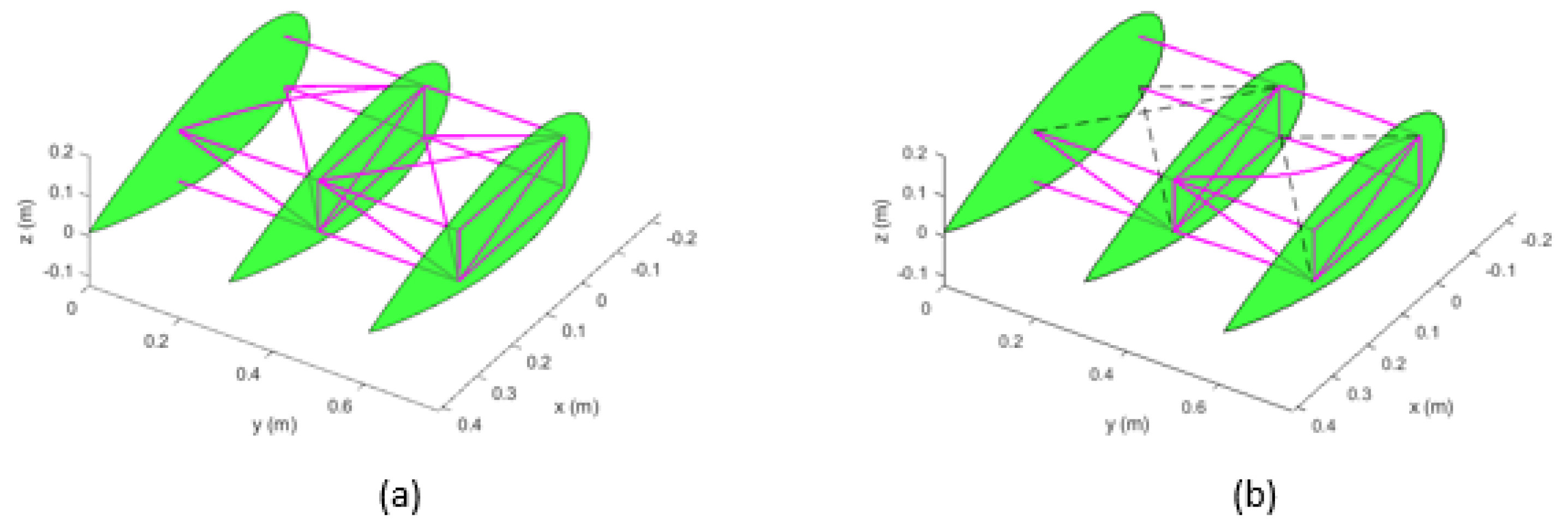
In what follows, the modal analysis is carried out for the intact morphed wing system (expanded span-wise by
of the original wing length), with all the beams fully functional. The first ten natural frequencies are given in
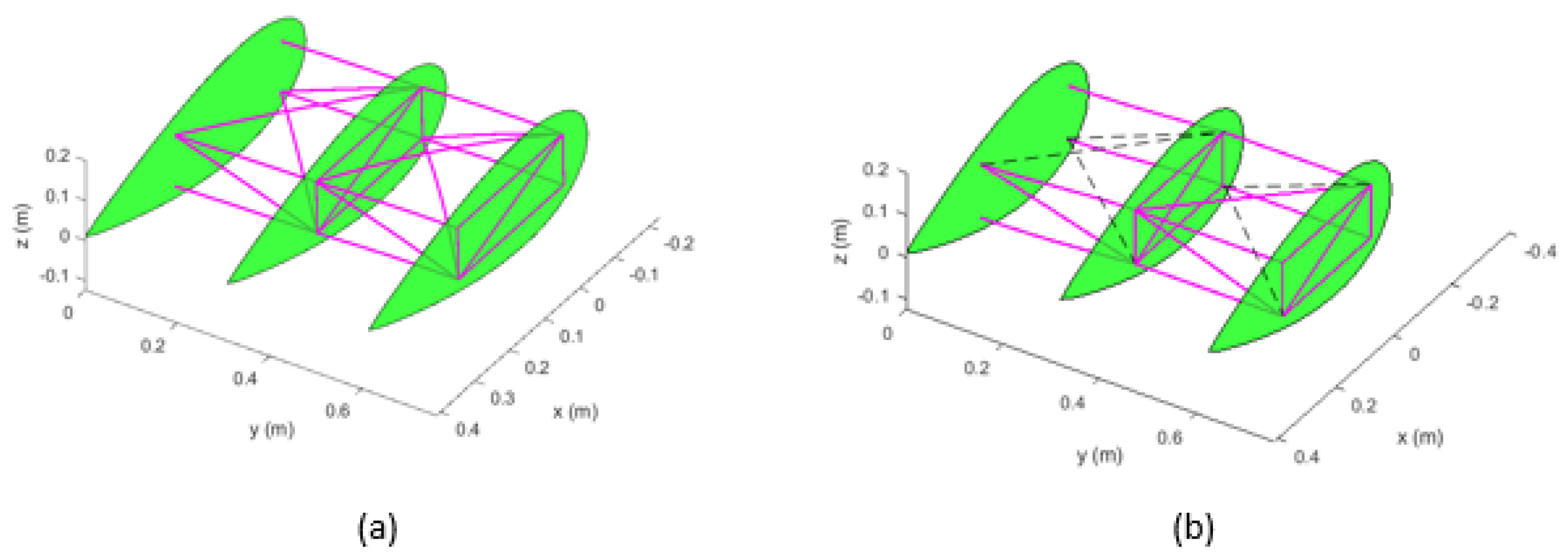
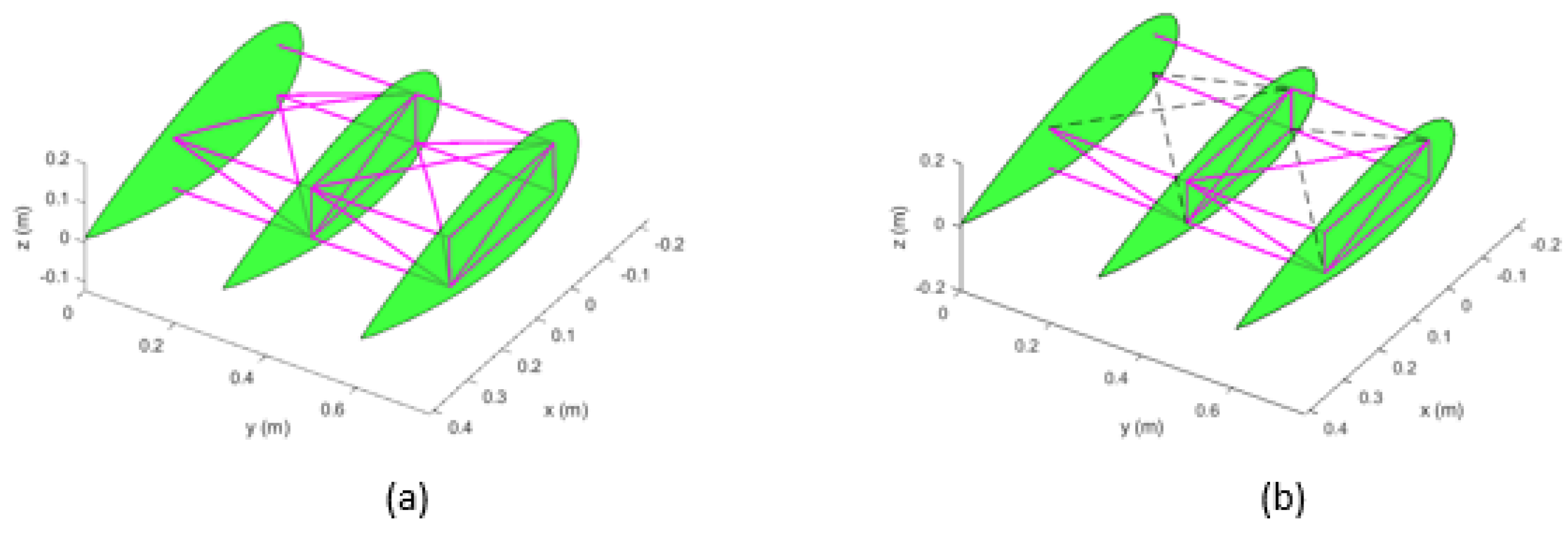
Table 11 below. Numerical simulations and experiments are then performed on the defective span-wise-morphed wing to study the hazard assessment. The resulting first ten natural frequencies, corresponding to the 12 experiments, are given in
Table 12. Once again, only the first five mode shapes for experiment six, involving five ruptured active beams, are presented for illustration purposes (
Figure 11,
Figure 12,
Figure 13,
Figure 14 and
Figure 15). As can be observed from the figures, the active beams in the defective wing do not exhibit very distinct flexural motions compared to the intact system. However, in the case of the second mode, the out-of-plane motion of the damaged wing is observed to be considerably higher than that of the intact configuration. By comparing the fundamental frequency values of the defective and intact morphed configurations (see
Table 11), one can observe that all but the one for experiment two reduce. Nevertheless, the next nine frequencies exhibit an increase, except the second frequency of experiment two. These trends can be explained using the same arguments as stated earlier in this paper about the unmorphed configurations. Similar to the previous case study, the signal-to-noise ratios (SN) of eight factors with two levels each are also computed here based on the corresponding natural frequencies of the fully intact morphed wing [
34,
35,
36]. Mean SN curves corresponding to each factors’ level are depicted in
Figure 16 for a representative case of the 4th natural frequency. By producing the SN ratios of the factors for all other frequencies, not presented here, it is observed that the hazard produced by the rupture of D1, T1 and H1 members are the most devastating factors.
Based on both case studies, these hazards (rupture of D1, T1, and H1) have been assigned the failure condition of ’hazardous’ due to the probable unexpected changes in the vibration signature. However, this could transform to the failure condition of ‘catastrophic’ in the presence of aerodynamic loads. Therefore, the aeroelastic analysis of such functional hazards is strongly recommended as the fluid–structure interaction could lead to the onset of flutter at lower speeds than that conceived during the preliminary design phase.
5. Conclusions
Compared to the fixed-shape counterparts, morphing wings bring prospective improvements in the lift-to-drag ratio, fuel saving, high performance at varying flight conditions, and enhancement of the flight envelope. However, due to the increased degrees-of-freedom and complexity of the structure, a potential failure of the component(s) could result in a drastic decline in the system’s performance or even a catastrophic failure condition. In the absence of airworthiness certification standards specifically outlined for the morphing wing, functional hazard assessment (FHA) becomes very challenging for such a system. In this paper, a re-configurable modular morphing wing design, developed in-house at the Toronto Metropolitan University (formerly Ryerson University), has been studied from the perspective of FHA. Hazards and their associated risks have been identified. A qualitative fault tree analysis (FTA) has been performed. It is shown that the identified hazards present ‘hazardous’ failure conditions from the perspective of the system’s vibration characteristics. However, the probability of such occurrence(s) is ‘extremely remote’, as required by the airworthiness certification. An exhaustive FEM-based modal analysis of systems involving various combinations of the identified hazards, in conjunction with the Taguchi method, revealed that the rupture of the first module’s active beams are the most critical components. On the basis of the presented simulation on the unmorphed and morphed configurations, it is concluded that the rupture of one of the downstream, toe, or head beam in module 1 (designated as D1, H1, and T1, respectively) could drastically affect the vibration signature of the studied morphing system. It is found that D1, H1 and T1 rank, respectively, the first, second and third (i.e., 90, 70, and of the time), in terms of their effect on the system’s natural frequencies. In the event of a failure, the higher natural frequencies are observed to shift towards lower ones, and some vibration modes disappear. This shift in the system’s natural frequencies could result in the onset of flutter at speeds lower than that conceived during the preliminary design phase. Therefore, a detailed quantitative FTA supplemented by aeroelastic analysis is highly recommended to ensure that a single failure does not cause a catastrophic failure condition, as mandated by the current airworthiness certification. In case of a potential catastrophic failure, safety measures must be implemented to make the design fail-safe.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}