


Energy-Efficient Relay Tracking and Predicting Movement Patterns with Multiple Mobile Camera Sensors


Abstract
:1. Introduction
- We implemented and enhanced the mobile cooperative relay algorithm [20] to demonstrate that it reduces the total moving distance of cameras and provides efficient monitoring time.
- We consider a single target problem and apply path prediction based on data mining.
- Cooperative relay tracking is used in cooperation with object movement prediction to obtain the shortest possible movement distance between camera sensors while also saving energy.
2. Related Work
3. Proposed Approach
- Prediction of an object’s future movement to activate only the camera sensor nodes required to follow the object;
- A wake-up technique that determines which nodes and when they should be activated based on some heuristics that take both energy and performance into account;
- A recovery mechanism that is activated only when the camera sensors fail to predict the object’s future path.
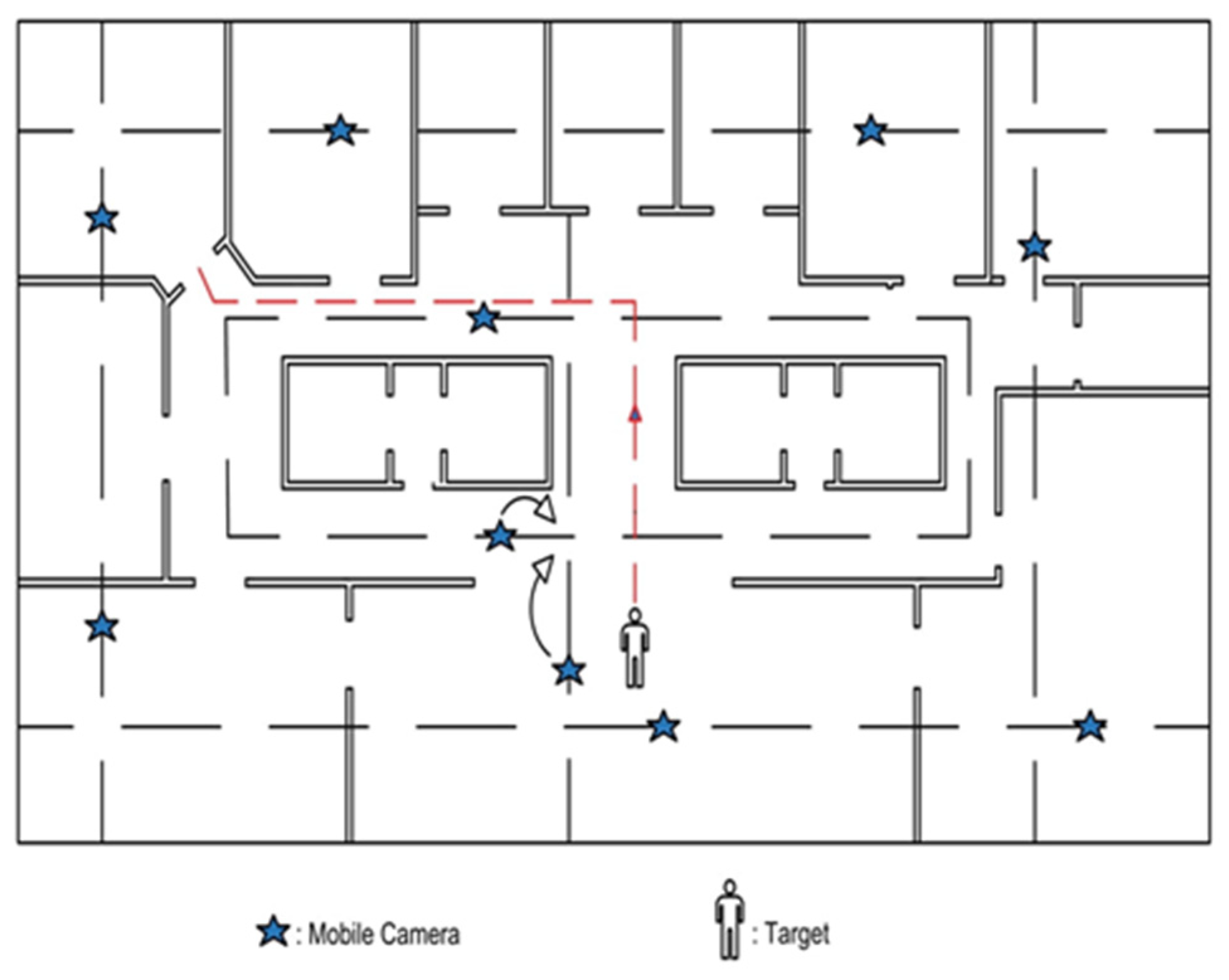
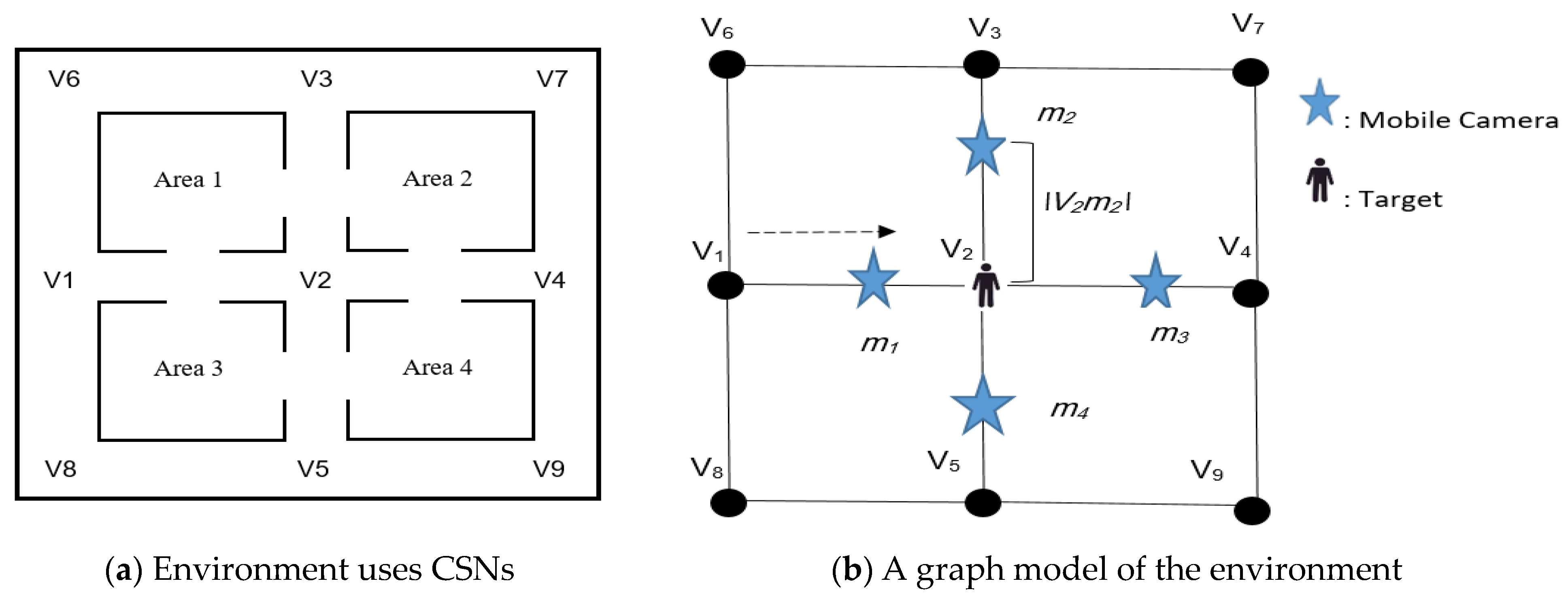
3.1. Tracking Problem Definition
3.2. Relay Tracking Algorithm
| Algorithm 1: movement pattern generation and cooperative relay algorithm for single target. | |
| Input: target’s position, state of vertex (v-State), state of edge (E-State), log all movements. | |
| Output: schedule of camera sensors; movement patterns. | |
| 1. | Divide network to regions. |
| 2. | While target is moving do |
| 3. | Calculate all satisfied EXP using Equation (9) |
| 4. | The camera sensor with the maximum EXP is chosen |
| 5. | Update V-state, E-state /* based on location of cameras */ |
| 6. | Log all sequential path p |
| 7. | For sensor id s in p |
| 8. | For level |
| 9. | S = S + 1 Increase count of pattern for s to next sensor in the corresponding level |
| 10. | End For |
| 11. | End For |
| 12. | Update V-state, E-state |
| 13. | Repeat steps 3 through 12 |
| 14. | End while |
3.3. Pattern Recognition Algorithm
3.4. Tracking the Location of the Target
| Algorithm 2: movement predicting the future location of a moving object | |
| Input: patterns: movement patterns. | |
| Output: predictable path. | |
| 1: | For level |
| 2: | Procedure predict (R, minSupport) |
| 3: | Sk: Candidate itemset of size k |
| 4: | Pk: frequent itemset of size k |
| 5: | P1 = {frequent items} |
| 6: | For (i = 1; Pk ! = Ø; i++) do |
| 7: | Sk+1 = candidates generated from Pk |
| 8: | Fore transaction t in R do |
| 9: | Sk+1 = Sk+1 + 1 |
| 10: | Pk+1 = Min(Sk+1) , candidates (Pk+1) ɛ minSupport |
| 11: | End |
| 12: | If the pattern i is correctly predicted then |
| 13: | Success and activate sensors in p only |
| 14: | Calculate the energy consumption |
| 15: | Else |
| 16: | Extend to higher region and predict |
| 17: | If predict fails then Call Cooperative relay algorithm |
| 18: | Calculate the energy consumption |
| 19: | End if |
| 20: | End For |
| 21: | End For |
4. Performance Evaluation
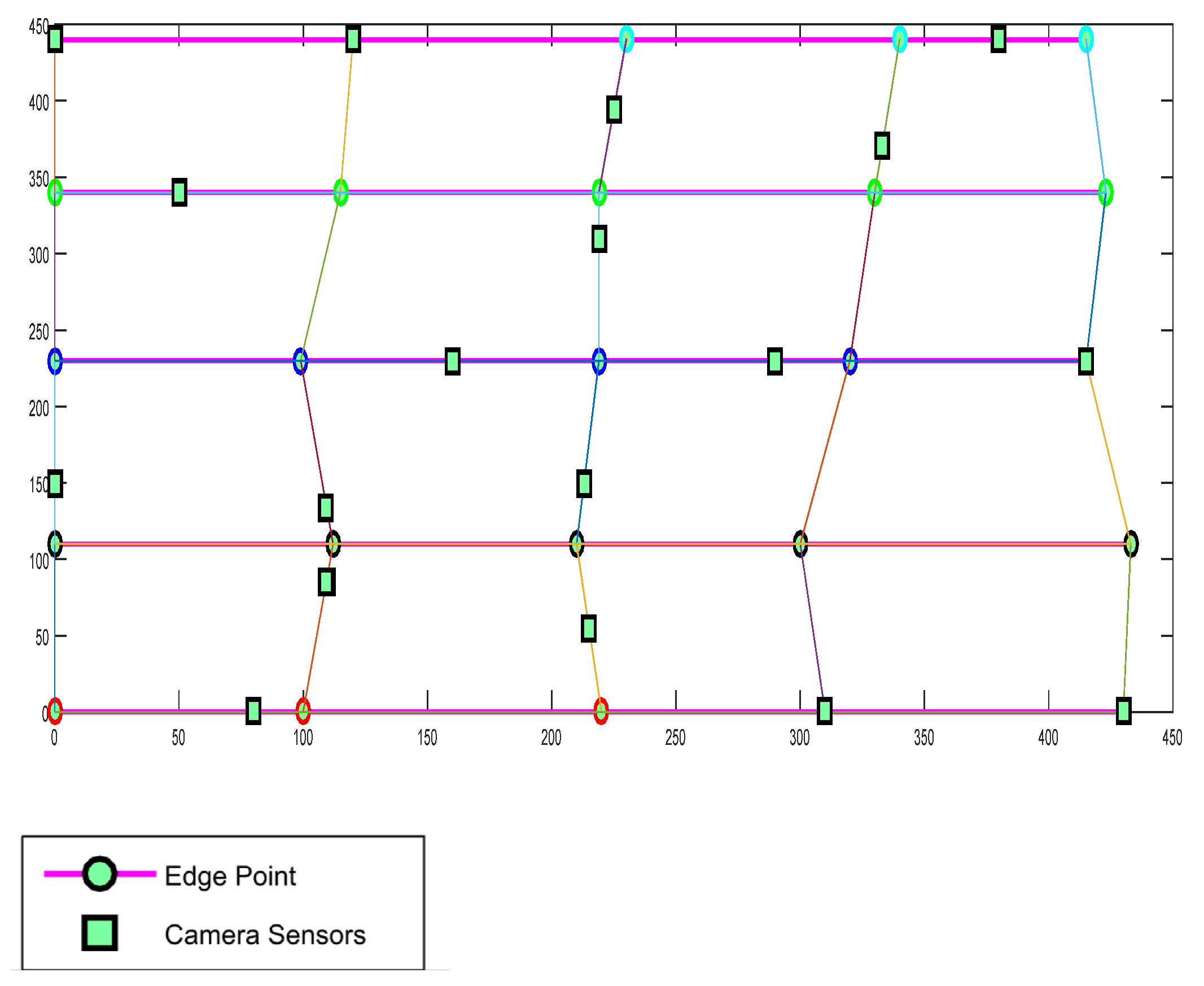
4.1. Simulation Setup
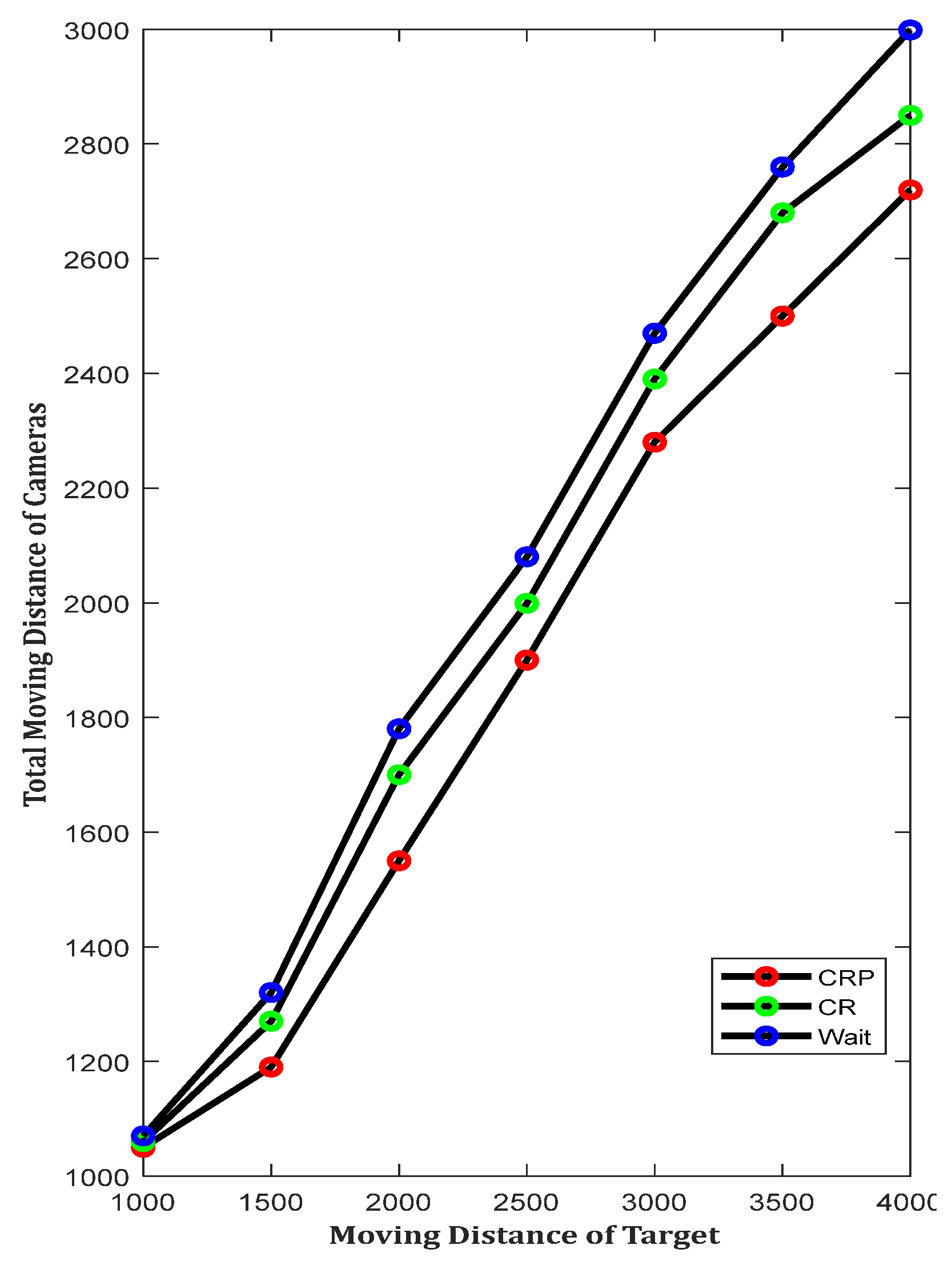
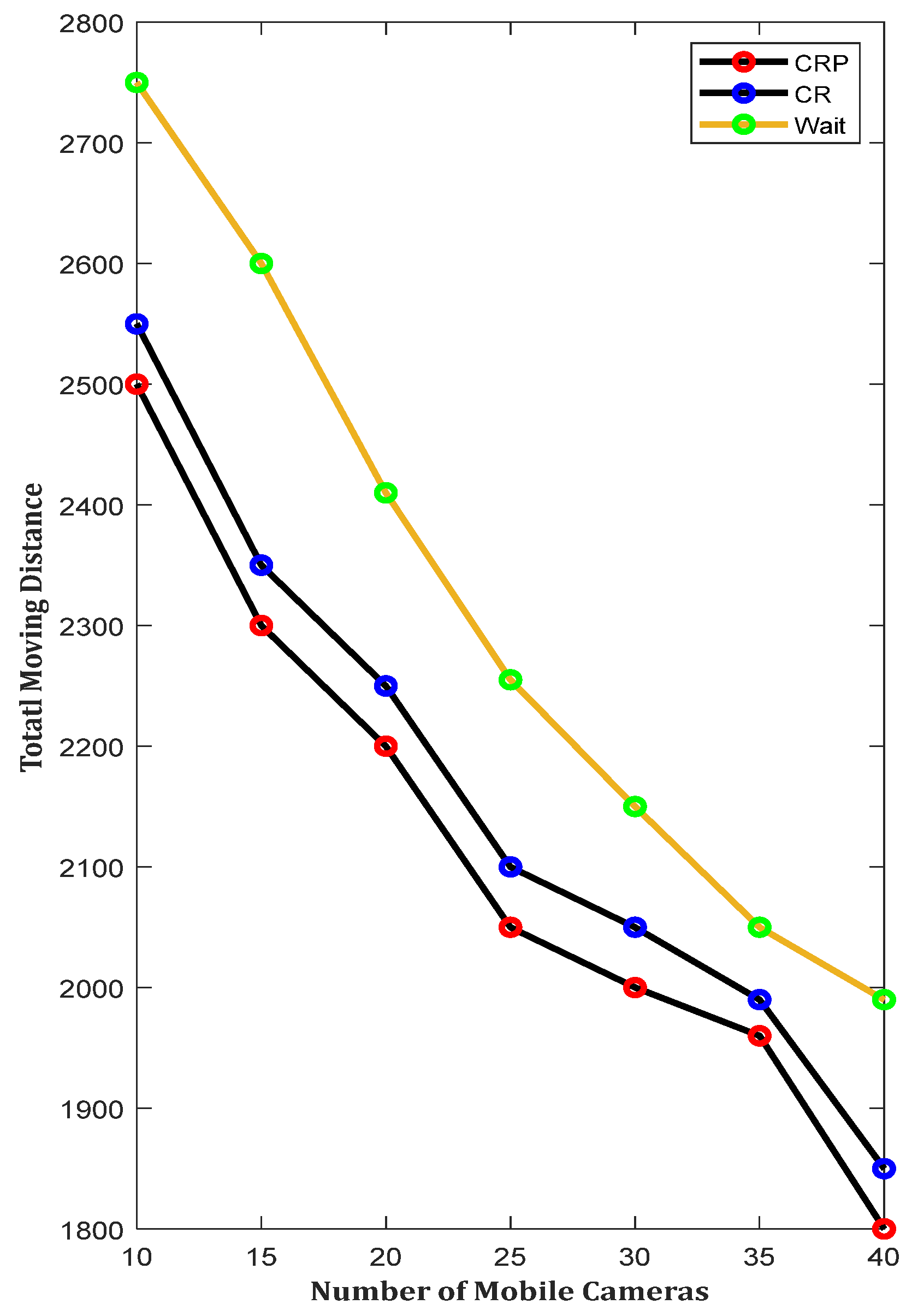
- The total moving distance of the cameras;
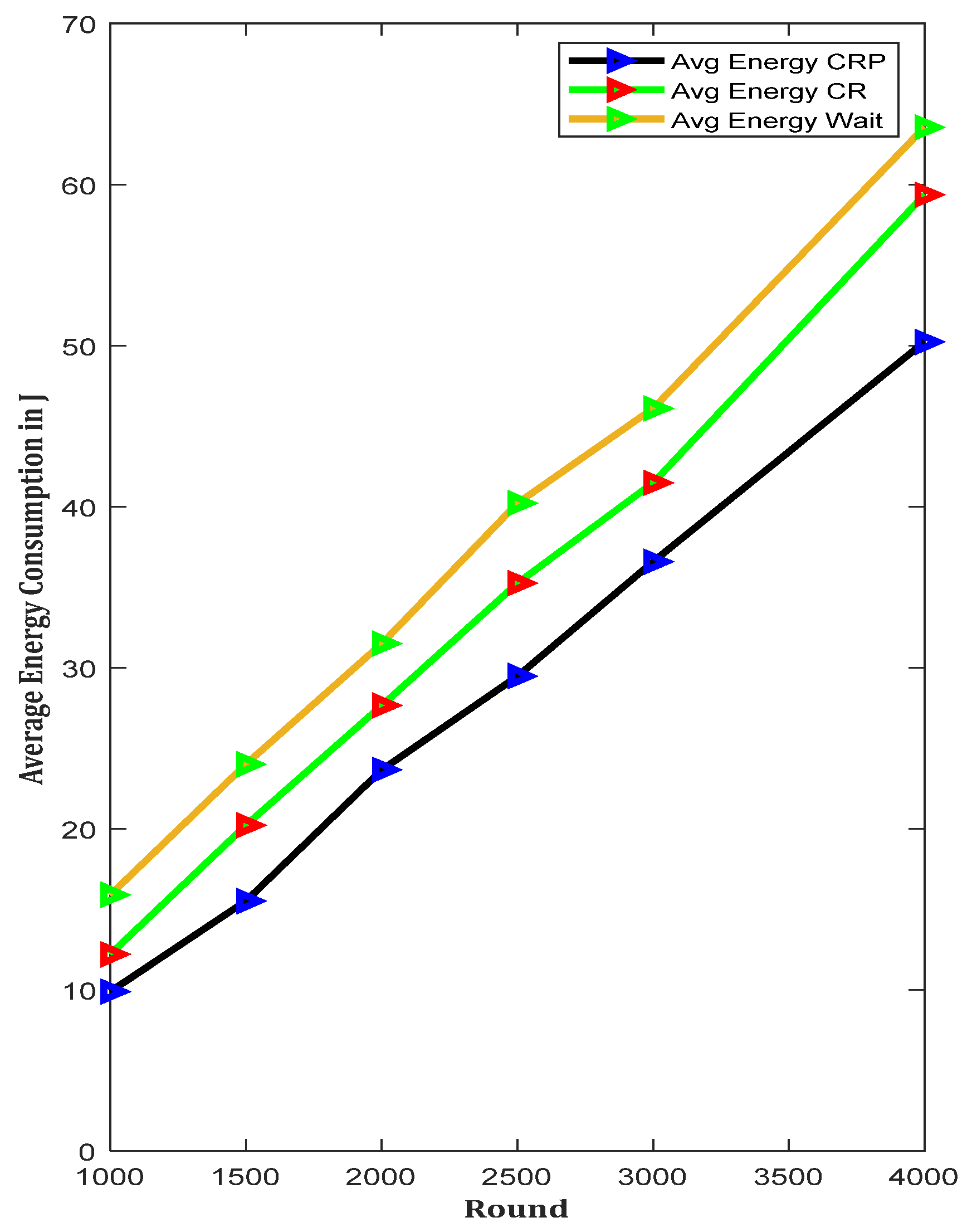
- The total energy consumed by the cameras;
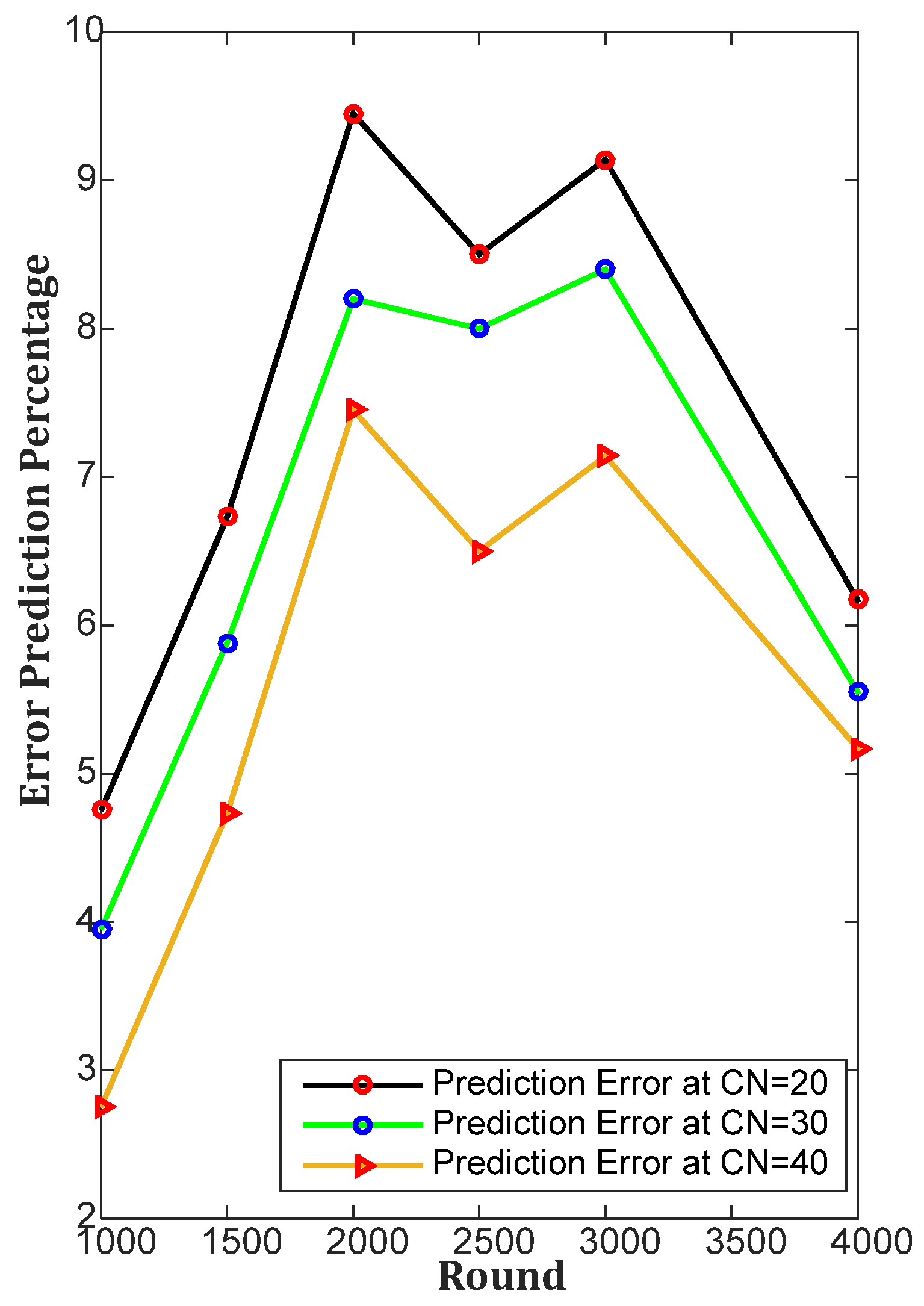
- The prediction error;
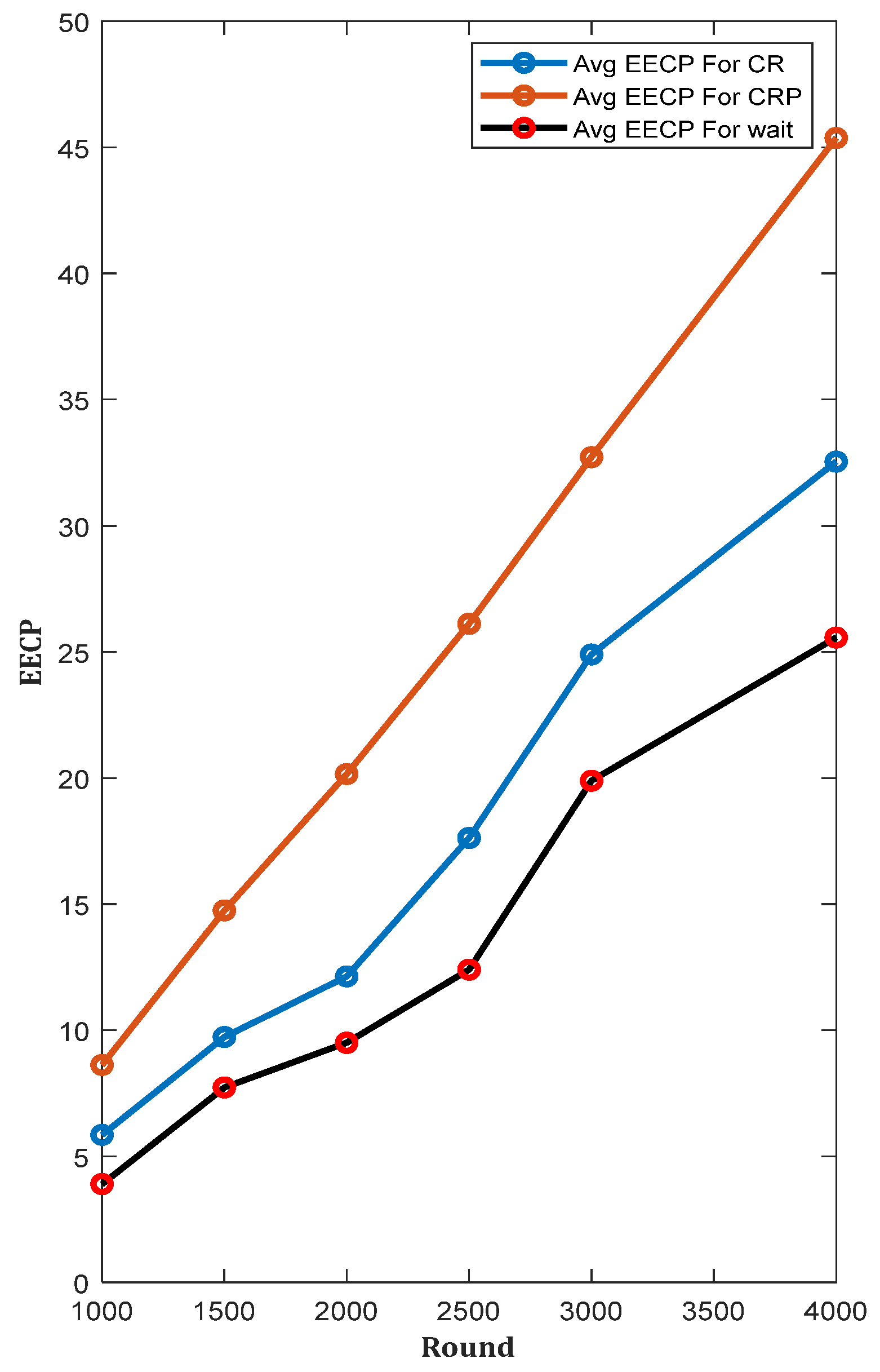
- The effective energy cost percentage (EECP), which is calculated as:
4.2. Simulation Results
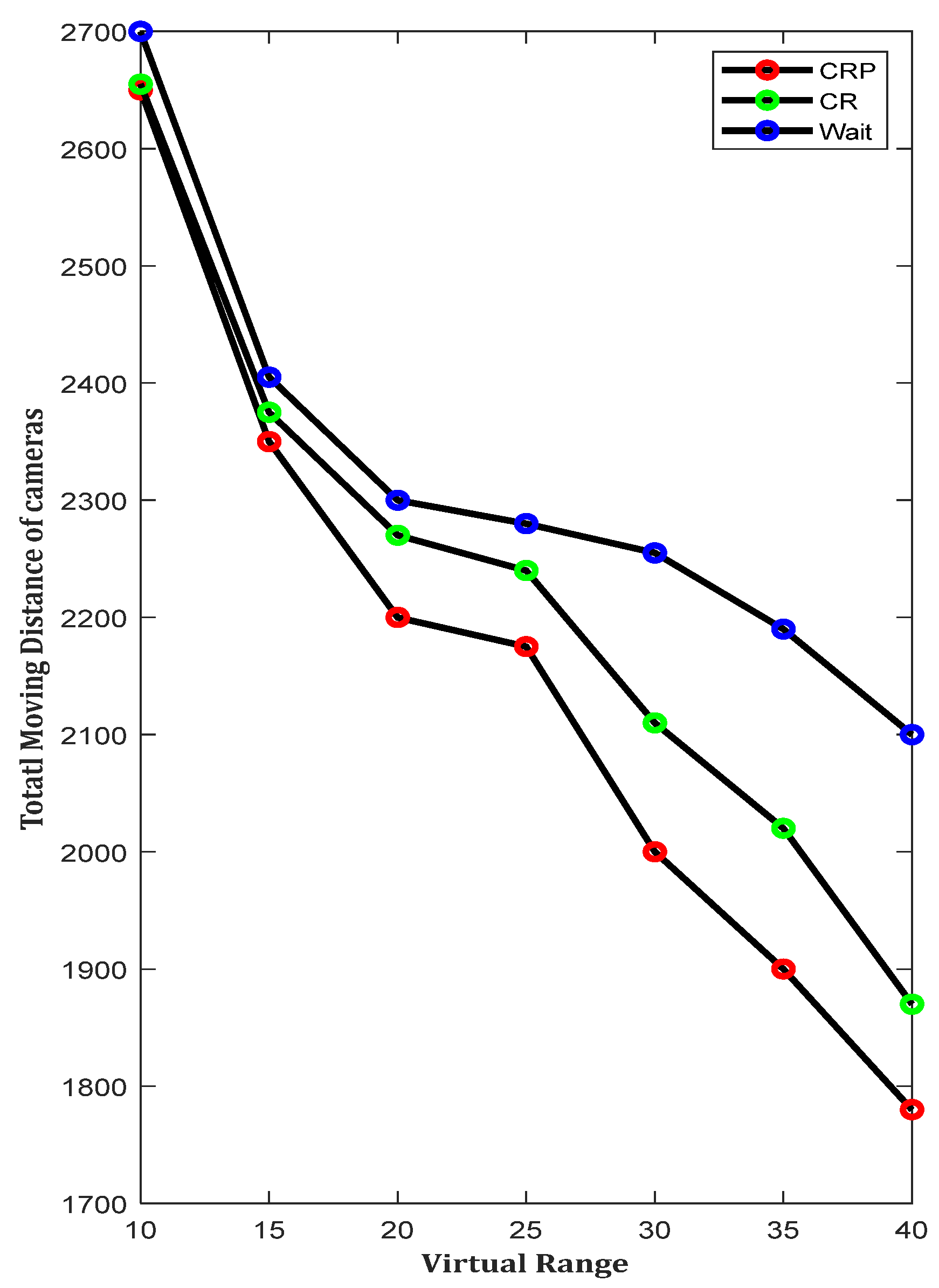
4.2.1. The Total Moving Distance of the Cameras
4.2.2. The Total Energy Consumed by the Cameras
4.2.3. The Prediction Error
4.2.4. The Effective Energy Cost Percentage (EECP)
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Floris, A.; Porcu, S.; Girau, R.; Atzori, L. An IoT-Based Smart Building Solution for Indoor Environment Management and Occupants Prediction. Energies 2021, 14, 2959. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Yuen, C.; Blessing, L. Plug-Mate: An IoT-based occupancy-driven plug load management system in smart buildings. Build. Environ. 2022, 223, 109472. [Google Scholar] [CrossRef]
- Zhuang, D.; Gan, V.J.; Tekler, Z.D.; Chong, A.; Tian, S.; Shi, X. Data-driven predictive control for smart HVAC system in IoT-integrated buildings with time-series forecasting and reinforcement learning. Appl. Energy 2023, 338, 120936. [Google Scholar] [CrossRef]
- Yang, C.; Wang, W.; Li, F.; Yang, D. A Sustainable, Interactive Elderly Healthcare System for Nursing Homes: An Interdisciplinary Design. Sustainability 2022, 14, 4204. [Google Scholar] [CrossRef]
- Cavur, M.; Demir, E. RSSI-based hybrid algorithm for real-time tracking in underground mining by using RFID technology. Phys. Commun. 2022, 55, 101863. [Google Scholar] [CrossRef]
- Kumar, T.; Srinivasan, R.; Mani, M. An Emergy-based Approach to Evaluate the Effectiveness of Integrating IoT-based Sensing Systems into Smart Buildings. Sustain. Energy Technol. Assess. 2022, 52, 102225. [Google Scholar] [CrossRef]
- Rizk, H.; Torki, M.; Youssef, M. CellinDeep: Robust and accurate cellular-based indoor localization via deep learning. IEEE Sens. J. 2018, 19, 2305–2312. [Google Scholar] [CrossRef]
- Hernández, N.; Parra, I.; Corrales, H.; Izquierdo, R.; Ballardini, A.L.; Salinas, C.; García, I. WiFiNet: WiFi-based indoor localisation using CNNs. Expert Syst. Appl. 2021, 177, 114906. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A scalable Bluetooth Low Energy approach to identify occupancy patterns and profiles in office spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Chong, A. Occupancy prediction using deep learning approaches across multiple space types: A minimum sensing strategy. Build. Environ. 2022, 226, 109689. [Google Scholar] [CrossRef]
- Jang, J.; Seon, M.; Choi, J. Lightweight Indoor Multi-Object Tracking in Overlapping FOV Multi-Camera Environments. Sensors 2022, 22, 5267. [Google Scholar] [CrossRef] [PubMed]
- Liu, Q.; Wang, G.; Li, F.; Yang, S.; Wu, J. Preserving privacy with probabilistic indistinguishability in weighted social networks. IEEE Trans. Parallel Distrib. Syst. 2016, 28, 1417–1429. [Google Scholar] [CrossRef]
- Pasqualetti, F.; Zanella, F.; Peters, J.R.; Spindler, M.; Carli, R.; Bullo, F. Camera network coordination for intruder detection. IEEE Trans. Control Syst. Technol. 2013, 22, 1669–1683. [Google Scholar] [CrossRef] [Green Version]
- Alam Bhuiyan, Z.; Wang, G.; Wu, J.; Cao, J.; Liu, X.; Wang, T. Dependable structural health monitoring using wireless sensor networks. IEEE Trans. Dependable Secur. Comput. 2015, 14, 363–376. [Google Scholar] [CrossRef]
- Morbidi, F.; Mariottini, G.L. Active target tracking and cooperative localization for teams of aerial vehicles. IEEE Trans. Control Syst. Technol. 2012, 21, 1694–1707. [Google Scholar] [CrossRef]
- Liao, Z.; Wang, J.; Zhang, S.; Cao, J.; Min, G. Minimizing movement for target coverage and network connectivity in mobile sensor networks. IEEE Trans. Parallel Distrib. Syst. 2014, 26, 1971–1983. [Google Scholar] [CrossRef]
- Tan, R.; Xing, G.; Wang, J.; So, H.C. Exploiting reactive mobility for collaborative target detection in wireless sensor networks. IEEE Trans. Mob. Comput. 2009, 9, 317–332. [Google Scholar] [CrossRef]
- Wang, G.; Alam Bhuiyan, Z.; Cao, J.; Wu, J. Detecting movements of a target using face tracking in wireless sensor networks. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 939–949. [Google Scholar] [CrossRef] [Green Version]
- Yu, Q.; Medioni, G.; Cohen, I. Multiple target tracking using spatio-temporal markov chain monte carlo data association. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition, Minneapolis, MN, USA, 17–22 June 2007; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, T.; Zeng, J.; Alam Bhuiyan, Z.; Chen, Y.; Cai, Y.; Tian, H.; Xie, M. Energy-efficient relay tracking with multiple mobile camera sensors. Comput. Netw. 2018, 133, 130–140. [Google Scholar] [CrossRef]
- Gao, X.; Yang, R.; Wu, F.; Chen, G.; Zhou, J. Optimization of full-view barrier coverage with rotatable camera sensors. In Proceedings of the 2017 IEEE 37th International Conference on Distributed Computing Systems (ICDCS), Atlanta, GA, USA, 5–8 June 2017; pp. 870–879. [Google Scholar] [CrossRef]
- Reddy, V.P.; Fathima, A.A. Object Tracking Based on Position Vectors and Pattern Matching. In Computational Signal Processing and Analysis; Springer: Singapore, 2018; pp. 407–416. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, X.; Gu, C. Online multi-object tracking with pedestrian re-identification and occlusion processing. Vis. Comput. 2020, 37, 1089–1099. [Google Scholar] [CrossRef]
- Tang, Z.; Hwang, J.-N. Moana: An online learned adaptive appearance model for robust multiple object tracking in 3d. IEEE Access 2019, 7, 31934–31945. [Google Scholar] [CrossRef]
- Wang, T.; Jia, W.; Wang, G.; Guo, M.; Li, J. Hole Avoiding in Advance Routing with Hole Recovery Mechanism in Wireless Sensor Networks. Adhoc Sens. Wirel. Netw. 2012, 16, 191–213. [Google Scholar]
- Yang, J.; Ge, H.; Yang, J.; Tong, Y.; Su, S. Online multi-object tracking using multi-function integration and tracking simulation training. Appl. Intell. 2021, 52, 1268–1288. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, X.; Gan, X. Critical sensing range for mobile heterogeneous camera sensor networks. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications, Toronto, ON, Canada, 27 April–2 May 2014; pp. 970–978. [Google Scholar] [CrossRef]
- Wang, Y.; Song, Y.; Gao, H.; Lewis, F.L. Distributed fault-tolerant control of virtually and physically interconnected systems with application to high-speed trains under traction/braking failures. IEEE Trans. Intell. Transp. Syst. 2015, 17, 535–545. [Google Scholar] [CrossRef]
- Qi, Y.; Cheng, P.; Bai, J.; Chen, J.; Guenard, A.; Song, Y.-Q.; Shi, Z. Energy-efficient target tracking by mobile sensors with limited sensing range. IEEE Trans. Ind. Electron. 2016, 63, 6949–6961. [Google Scholar] [CrossRef]
- Tsai, R. A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE J. Robot. Autom. 1987, 3, 323–344. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Liu, X.; Kulkarni, P.; Shenoy, P.; Ganesan, D. Snapshot: A self-calibration protocol for camera sensor networks. In Proceedings of the 2006 3rd International Conference on Broadband Communications, Networks and Systems, San Jose, CA, USA, 1–5 October 2006; pp. 1–10. [Google Scholar] [CrossRef] [Green Version]
- Funiak, S.; Guestrin, C.; Paskin, M.; Sukthankar, R. Distributed localization of networked cameras. In Proceedings of the 5th International Conference on Information Processing in Sensor Networks, Nashville, TN, USA, 19–21 April 2006; pp. 34–42. [Google Scholar]
- Chu, M.; Reich, J.; Zhao, F. Distributed attention in large scale video sensor networks. IEEE Intell. Distrib. Surveilliance Syst. 2004, 61–65. [Google Scholar] [CrossRef]
- Liao, W.-H.; Chang, K.-C.; Kedia, S.P. An object tracking scheme for wireless sensor networks using data mining mechanism. In Proceedings of the 2012 IEEE Network Operations and Management Symposium, Maui, HI, USA, 16–20 April 2012; pp. 526–529. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Node ID | Time of Arrival | Next Node | Final Destination |
|---|---|---|---|
| Object1 | 14:15 | Node 8 | Node 13 |
| Object2 | 14:20 | Node 2 | Node 20 |
| Object3 | 14:45 | Node 4 | Node 10 |
| Object4 | 15:10 | Node 8 | Node 13 |
| Object5 | 16:30 | Node 8 | Node 26 |
| Object6 | 16:50 | Node 2 | Node 10 |
| Object7 | 17:17 | Node 3 | Node 13 |
| Obj-Path-id | Movement Path |
|---|---|
| 1 | 21, 16, 17, 12, 13, 8, 9, 10 |
| 2 | 21, 22, 17, 16, 11, 12, 17, 18 |
| 3 | 21, 22, 23, 16, 17, 18, 19, 14, 9, 4, 3, 4, 5, 10, 9 |
| 4 | 1, 2, 7, 12, 13, 18, 17, 22, 23, 24, 19, 14, 15, 20, 25, 24, 19, 14, 15 |
| 5 | 21, 16, 21, 22, 17, 12, 7, 6, 7, 12, 17, 16, 17, 18, 17, 16, 17, 18, 23, 24, 25, 24, 19, 18, 23, 22, 23, 18 |
| 6 | 1, 6, 11, 12, 21, 22, 23, 18 |
| 7 | 1, 2, 3, 8, 7, 12, 13, 14, 9, 10, 15, 11, 12, 17, 18, 23, 15, 20 |
| 8 | 1, 6, 7, 12, 11, 16, 21, 22, 12, 17, 18, 13, 18, 19, 14, 15, 20, 25 |
| 9 | 21, 22, 17, 22, 23, 24, 19, 20, 25, 24, 25, 20, 19, 14, 13, 8, 9, 10, 5 |
| 10 | 21, 16, 21, 22, 17, 12, 7, 6, 7, 12, 17, 16, 17, 18, 17, 16, 17, 12, 7, 6, 1, 2, 7, 8, 9, 15, 20, 19, 18 |
| 11 | 21, 22, 17, 22, 23, 24, 19, 20, 25, 24, 25, 20, 19, 14, 13, 8, 9, 10, 5 |
| 12 | 21, 16, 17, 12, 7, 6, 7, 12, 17, 16, 17, 18, 19, 13, 8, 9, 14, 18, 23, 24, 25, 24, 19, 18, 13, 8, 9, 10, 5 |
| 13 | 1, 6, 7, 8, 13, 12, 17, 18, 23, 18, 13, 5, 9, 14, 19, 20, 25, 24, 19, 14, 9, 4, 5 |
| TID | T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | T9 |
|---|---|---|---|---|---|---|---|---|---|
| Item set | I1, I2, I5 | I2, I4 | I2, I3 | I1, I2, I4 | I1, I3 | I2, I3 | I1, I3 | I1, I2, I3, I5 | I1, I2, I3 |
| Source Node ID | Level 1 | Level 2 | Level 3 | Level 4 |
|---|---|---|---|---|
| 1 | 6 (9) 2 (6) 3 (1) | 3 * (10) 2 * (6) | 2 * (3) | ** |
| 2 | 3 (7) 7 (5) | 3 * (4) | 2 * (3) | ** |
| 3 | 4 (5) 8 (4) | 3 * (6) | 2 * (6) | ** |
| 4 | 9 (5) 5 (3) 3 (3) | 4 * (7) 1 * (4) | 4 * (3) 1 * (1) | ** |
| 5 | 10 (6) 4 (4) | 4 * (3) | 3 * (3) | ** |
| 6 | 7 (5) 11 (4) 1 (2) | 3 * (4) 2 * (2) | 1 * (4) 2 * (2) | ** |
| 7 | 8 (5) 12 (4) 2 (2) 6 (1) | 3 * (4) 2 * (2) | 1 * (4) 2 * (2) | ** |
| 8 | 13 (8) 9 (5) 3 (4) 7 (1) | 2 * (5) 3 * (2) | 2 * (5) 1 * (2) | ** |
| 9 | 10 (5) 8 (4) 14 (3) | 4 * (6) 1 * (2) | 4 * (4) 2 * (2) | ** |
| 10 | 15 (10) 9 (5) 5 (3) | 4 * (3) 1 * (2) | 4 * (3) 2 * (2) | ** |
| Parameters | Values |
|---|---|
| Area Size (m2) | 450 × 450 |
| Camera Number | 20, 30, 40 |
| Round | 50 |
| Moving Distance of Target (m) | 1000–4000 |
| Visual sight of a Camera (m) | 10–40 |
| Initial Energy | 200 J |
| Switch Energy | 0.026 J |
| Consumed Energy | 0.6 J |
| Sensing Energy | 0.028 J |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hussein, Z.; Banimelhem, O. Energy-Efficient Relay Tracking and Predicting Movement Patterns with Multiple Mobile Camera Sensors. J. Sens. Actuator Netw. 2023, 12, 35. https://doi.org/10.3390/jsan12020035
Hussein Z, Banimelhem O. Energy-Efficient Relay Tracking and Predicting Movement Patterns with Multiple Mobile Camera Sensors. Journal of Sensor and Actuator Networks. 2023; 12(2):35. https://doi.org/10.3390/jsan12020035
Chicago/Turabian StyleHussein, Zeinab, and Omar Banimelhem. 2023. "Energy-Efficient Relay Tracking and Predicting Movement Patterns with Multiple Mobile Camera Sensors" Journal of Sensor and Actuator Networks 12, no. 2: 35. https://doi.org/10.3390/jsan12020035