

Automatic Generation of 3D Indoor Navigation Networks from Building Information Modeling Data Using Image Thinning

Abstract
:1. Introduction
- (1)
- Floor-level indoor navigation network generation. Some floor-level indoor navigation network generation schemes based on BIM employ the technologies of visibility graphs (VG) [15] and Medial Axis Transform (MAT) [9,10,16,17,18,19]. Compared with VG-based navigation network models, MAT-based schemes can generate navigation networks, which are more succinct and more consist with common human cognition. Nonetheless, these methods usually require well-defined spatial semantics, i.e., rooms and corridors. When spatial semantics are not provided or the indoor environments are complex with a variety of furniture, these methods fail to work.
- (2)
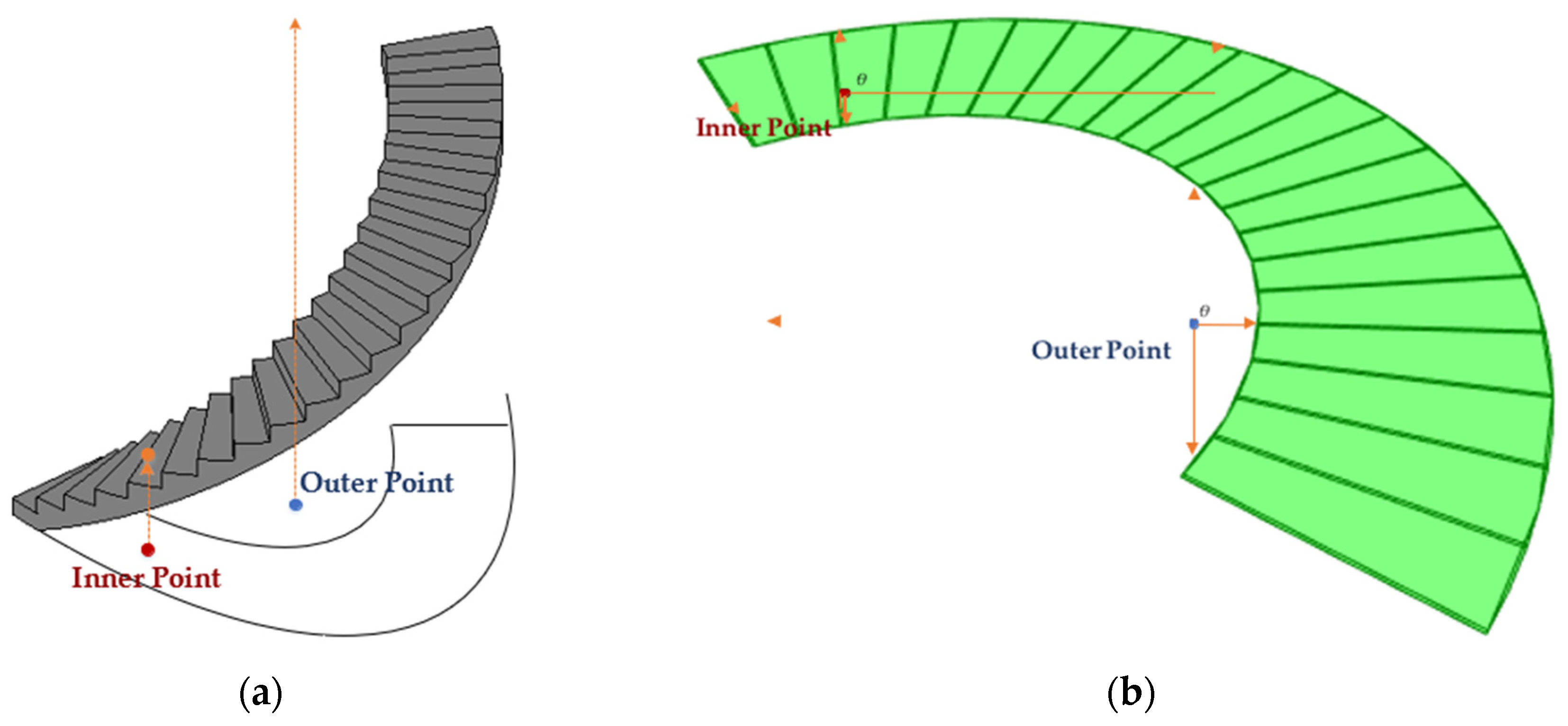
- Cross-floor path generation. While previous studies [9,20] have explored generating cross-floor paths from BIM data, these methods may not be easily adaptable to irregular architectural components, e.g., winding stairs and curved ramps. As a result, automatically generating navigation paths from such irregular architectural components remains a challenging task.
- (1)
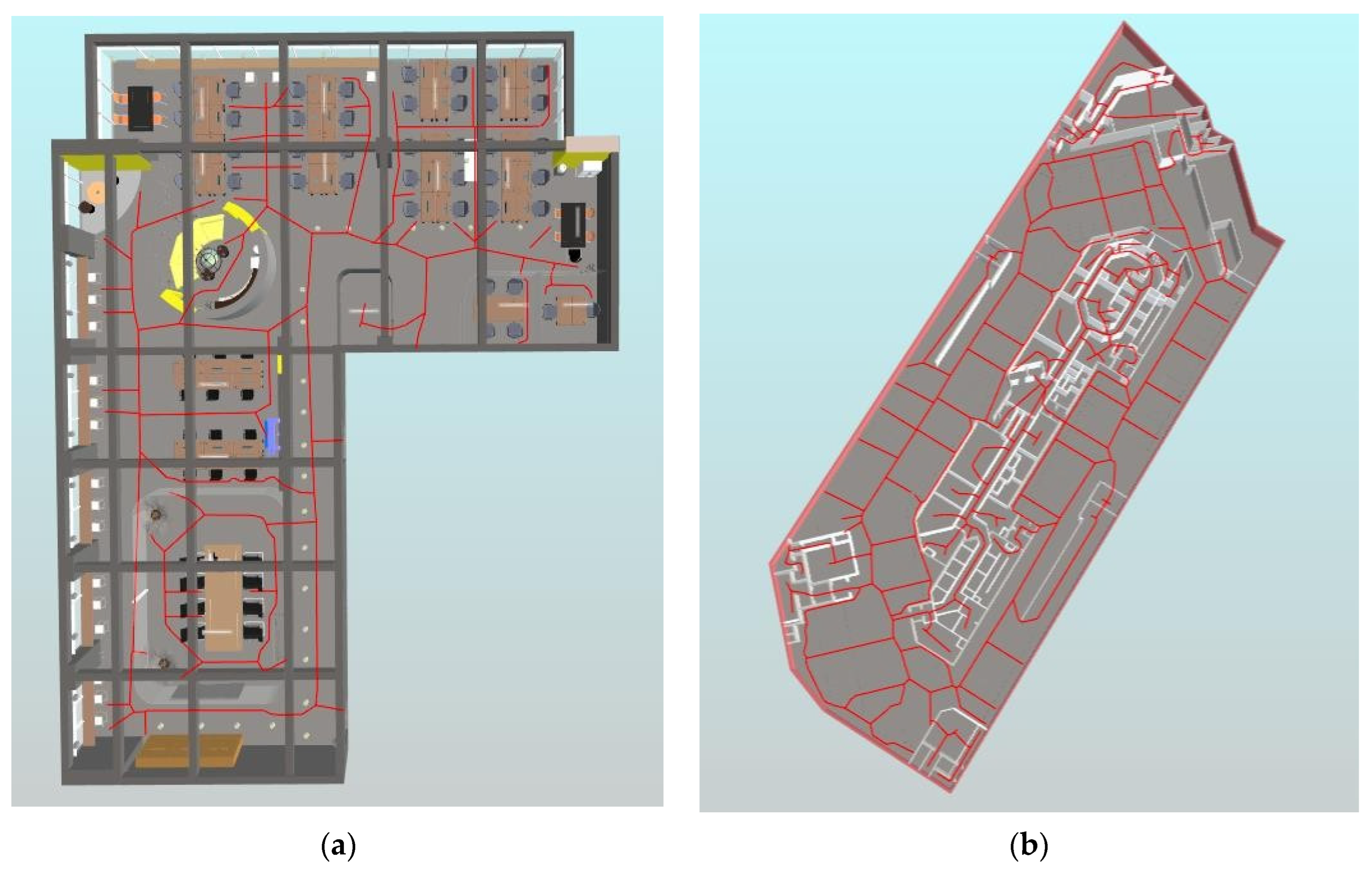
- Compared with current BIM-based floor-level navigation network generation schemes, GINIT does not require spatial semantics and can be applied to any indoor environments. GINIT maps and discretizes all the elements on a floor to a 2D plane to generate a grid-based map. Only two types of element need to be defined, namely, slabs and doors. Slabs are passable areas, while doors define a passable route across obstacles. The remaining elements are considered obstacles. This avoids the definition of spaces. On top of this, GINIT generates floor-level indoor navigation networks by thinning the grid-based maps. Since image thinning is adaptive to any binary image, GINIT can extract floor-level navigation networks with any environment. Additionally, the navigation networks generated by GINIT are consistent with human cognition, because image thinning can maintain the shape of passable areas in buildings.
- (2)
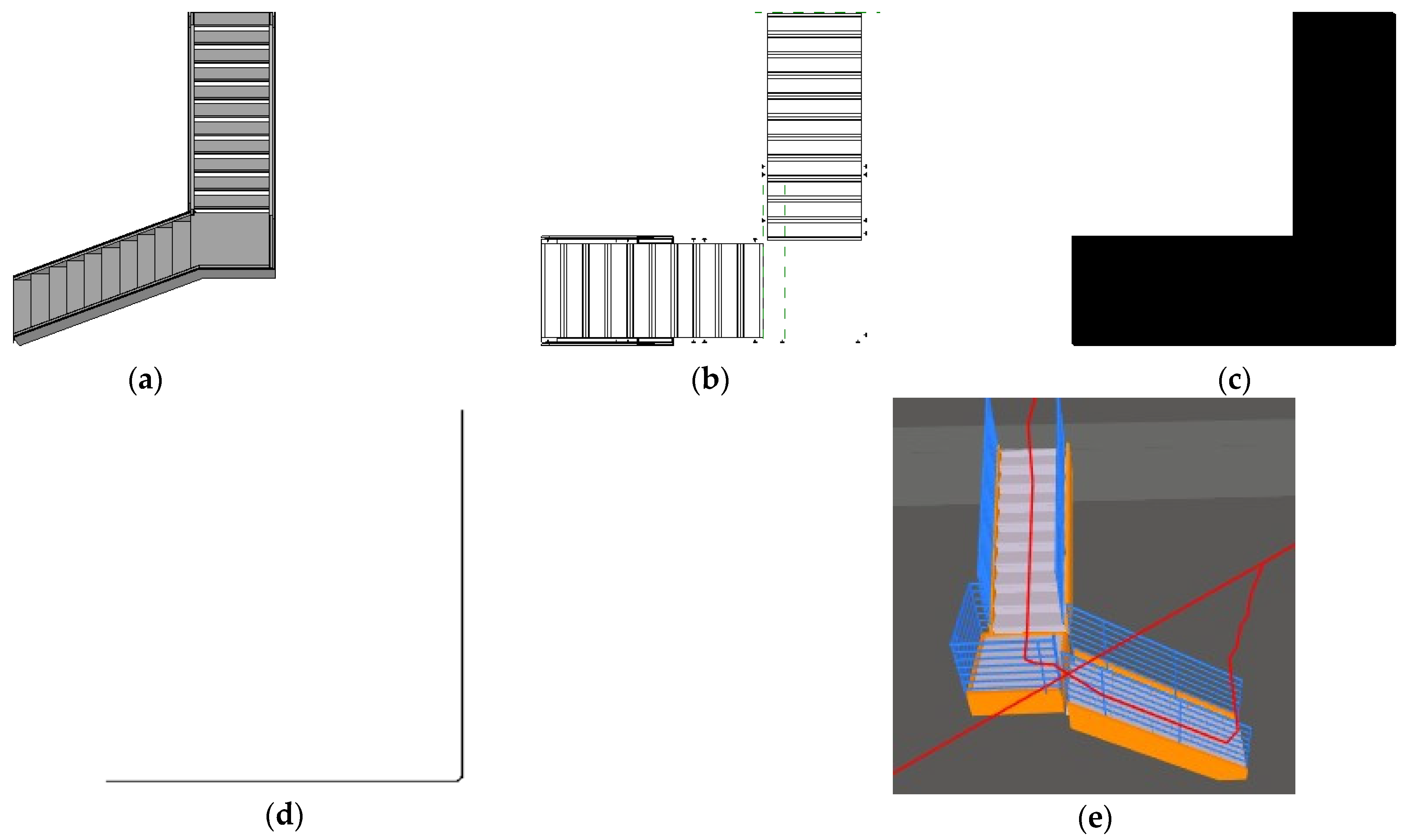
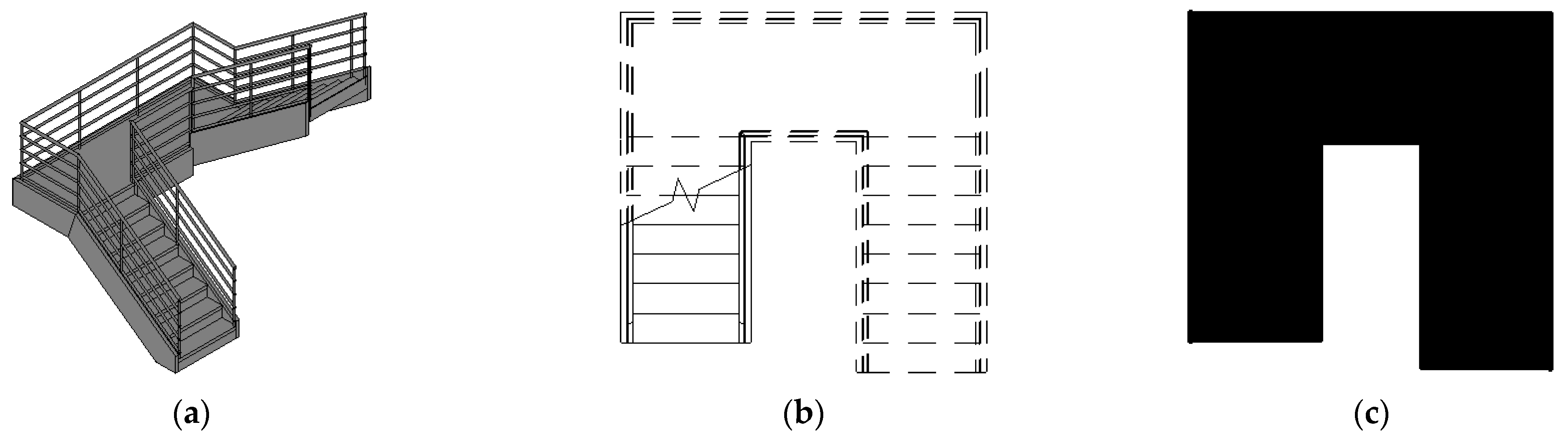
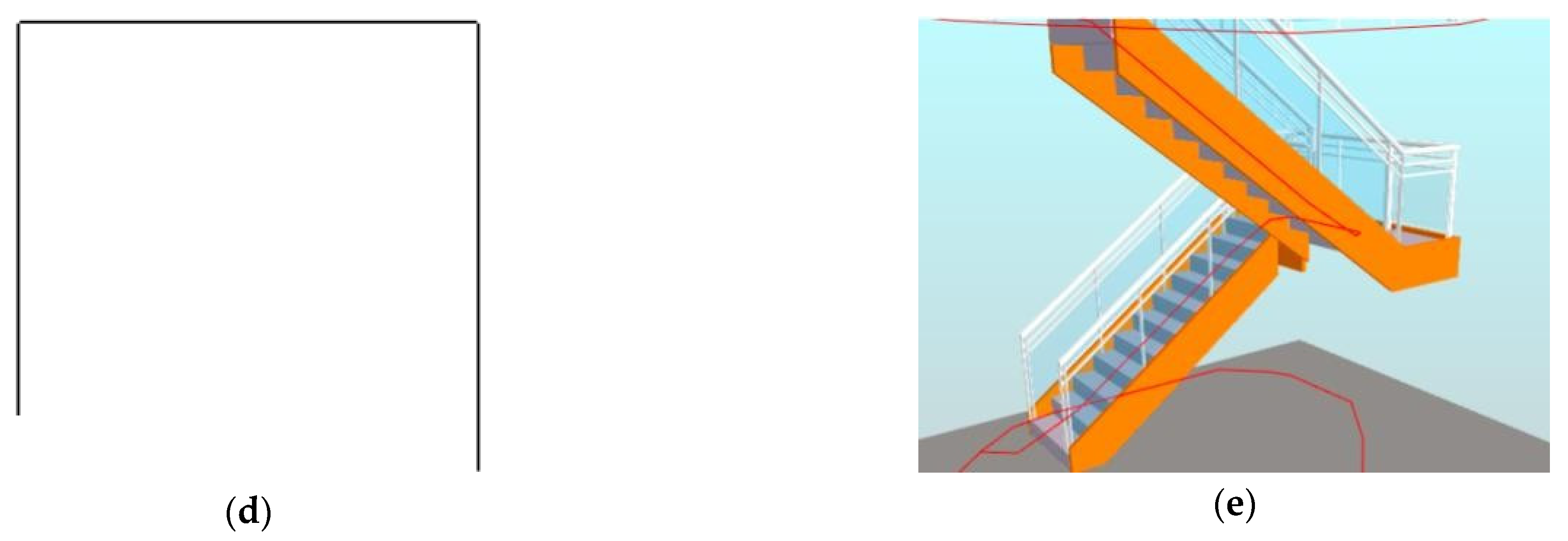
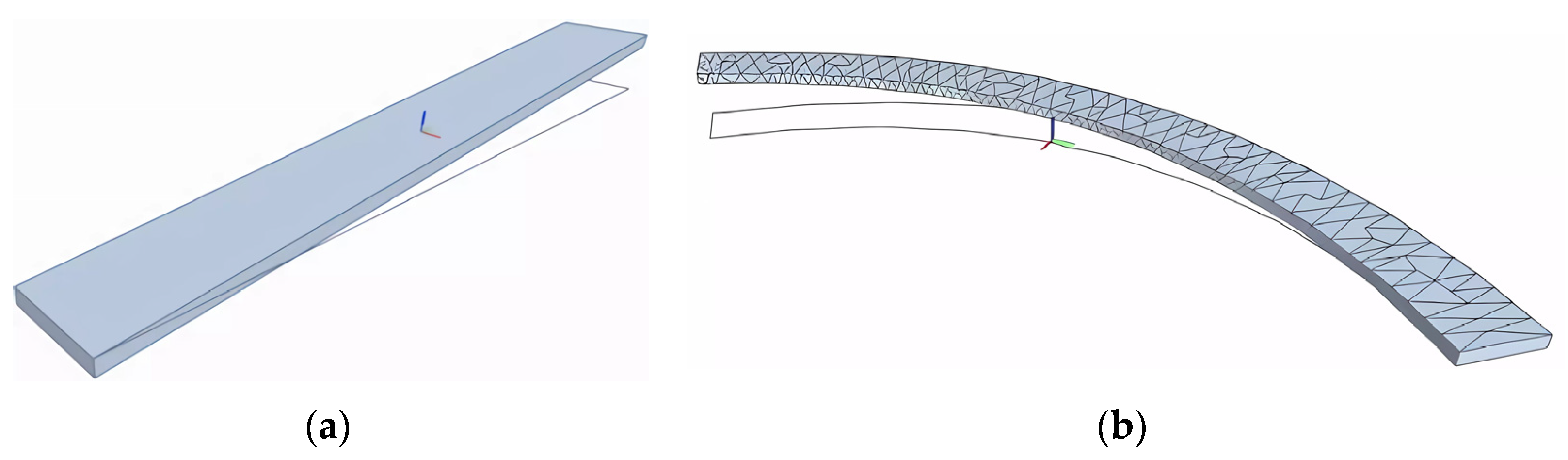
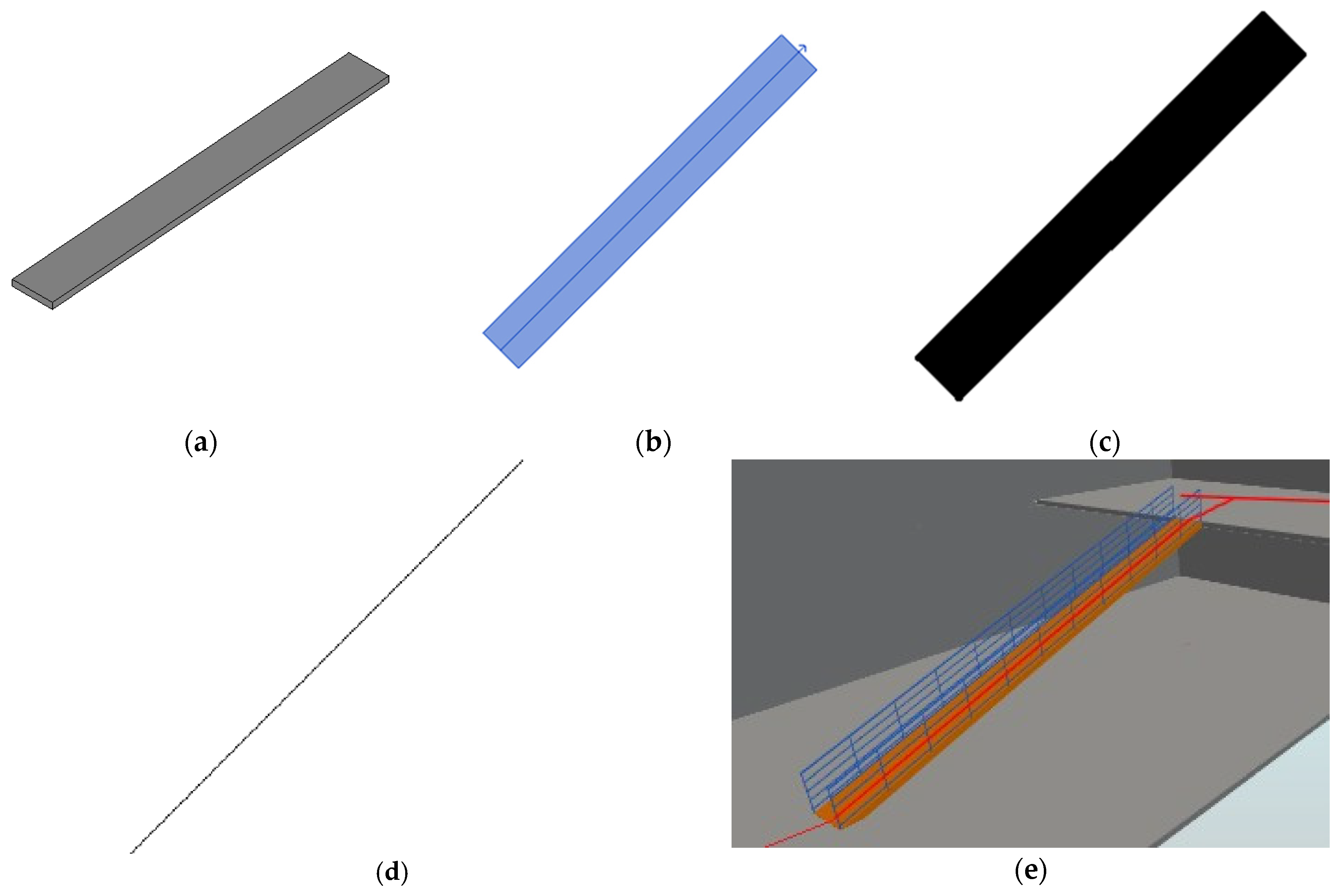
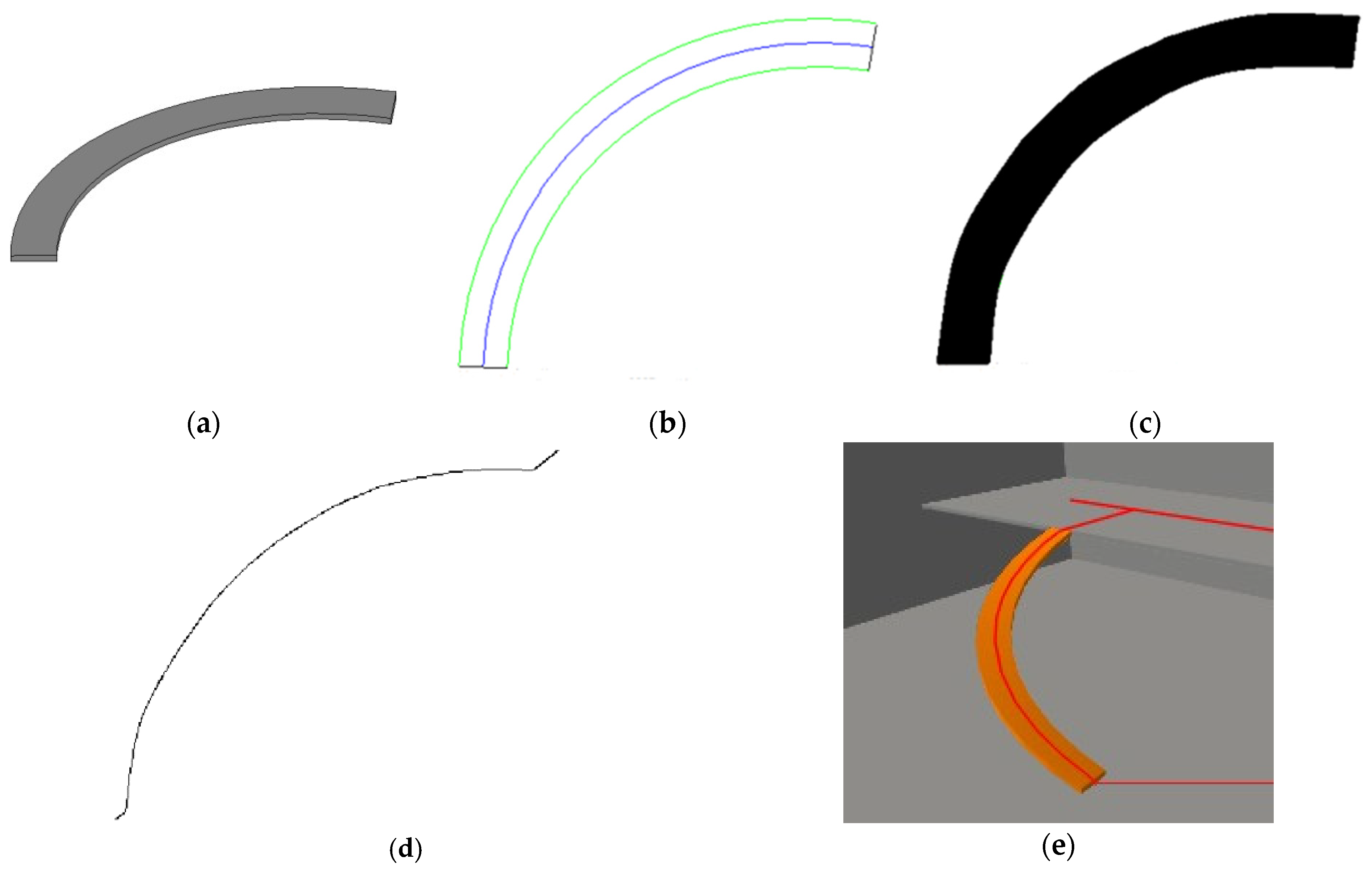
- Compared to current BIM-based cross-floor path generation methods, GINIT offers the advantage of being able to extract paths from architectural components with diverse 3D shapes. Similar to the process of generating a cross-floor navigation network, GINIT employs image thinning to project a cross-floor architectural component onto a 2D plane in order to derive a project path. The cross-floor path is then restored by crossing over the projection route using a 3D model. The ability of image thinning to capture lines from any binary image while preserving the shape of the given image allows GINIT to produce cross-floor routes from architectural components with arbitrary 3D shapes.
- (3)
- The current 3D indoor navigation network generation schemes (VG-/MAT-based schemes) are generally based on the theory of geometry in computer graphics. Instead, GINIT employs a thinning algorithm, another major branch in computer graphics. From this perspective, GINIT extends the applications of the image thinning algorithm to the BIM area and inspires great advancements in the study on BIM with imaging theory.
2. Related Works
2.1. The Production of Floor-Level Indoor Maps Utilizing BIM
2.1.1. Grid-Based Navigation Maps
2.1.2. Topology-Based Navigation Network
2.2. The Generation of Cross-Floor Paths Utilizing BIM
2.3. Image Thinning
3. Floor-Level Navigation Network Generation
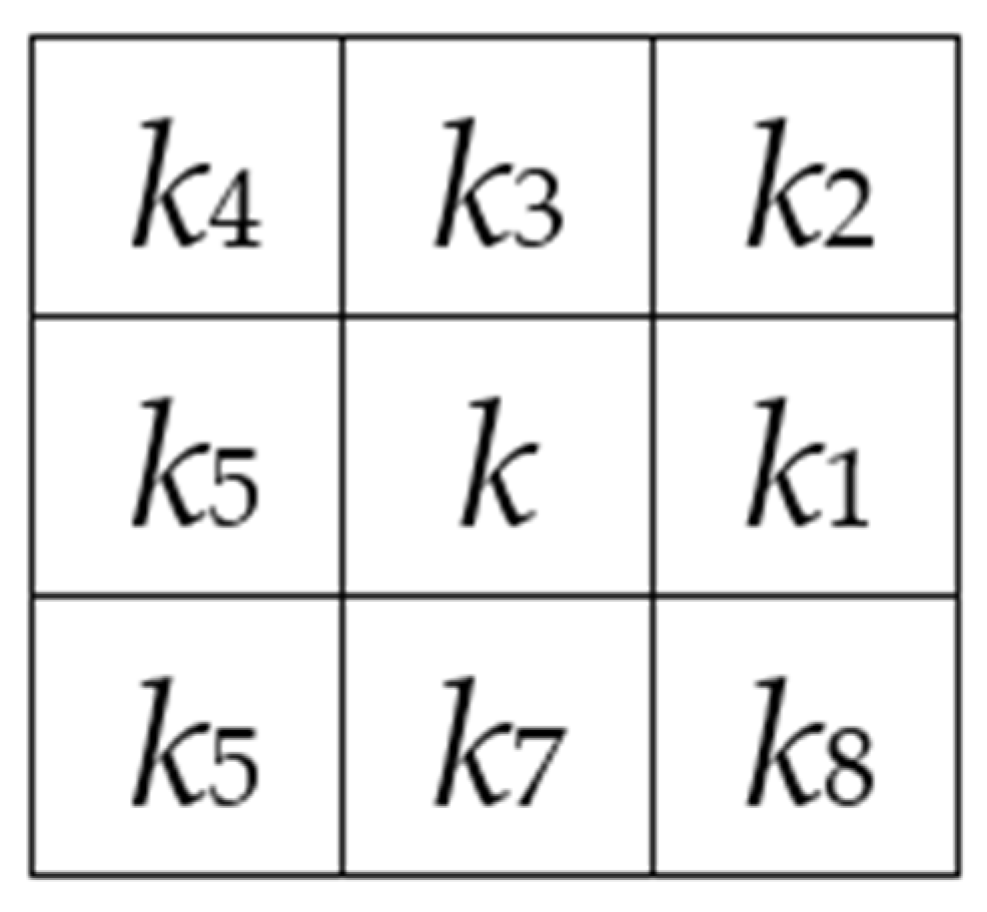
3.1. Zhang–Suen Thinning Algorithm
- Sub-iteration 1: Deletes pixel k while satisfying:Ck = 1,
2 ≤ Dk ≤ 6,
bk1 × bk3 × bk7 = 0,
bk1 × bk5 × bk7 = 0. - Sub-iteration 2: Deletes pixel k while satisfying:Ck = 1,
2 ≤ Dk ≤ 6,
bk1 × bk3 × bk5 = 0,
bk3 × bk5 × bk7 = 0.
3.2. Floor-Level Navigation Network Generation Using Image Thinning
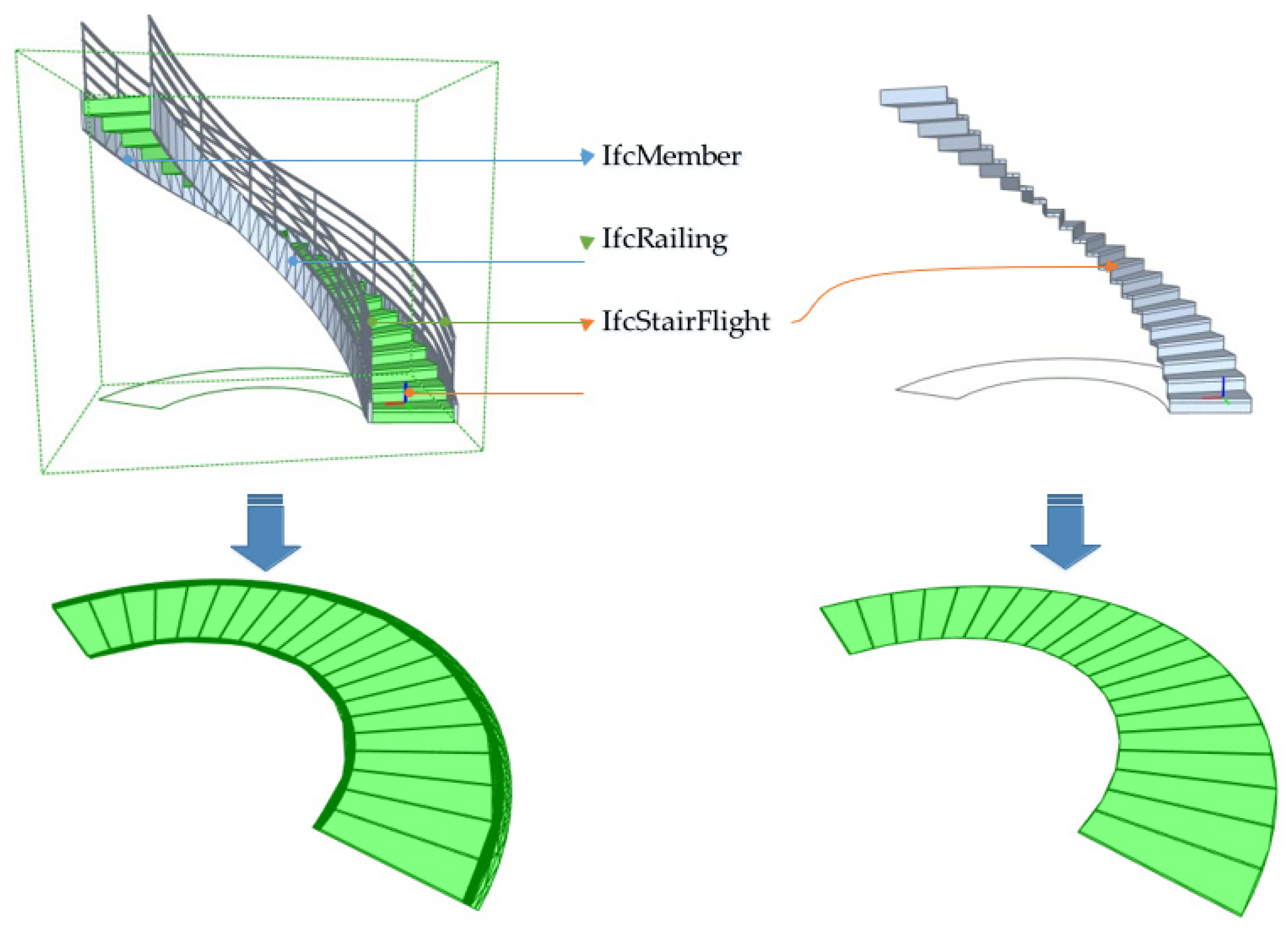
- (1)
- Information extraction from BIM models. The process of information extraction entails extracting essential semantic information from the BIM while ensuring that the amount of data extracted is minimal. The geometric data include all the 3D architectural components. The semantic information is categorized into three types: accessible areas (e.g., slabs), accessible architectural components (e.g., doors), and obstacles. All the architectural components, which are not considered accessible areas and elements, are treated as obstacles.
- (2)
- Grid-based map generation. The process begins by performing an ‘intersection’ operation on accessible areas with accessible elements and the obstacles to obtain the boundaries of the obstacles. Then, the intersection results are discretized and mapped onto a planar grid, which generates grid-based maps. This study assumes that a navigation network is generated for pedestrians, and the networks mentioned later are all pedestrian navigation networks.
- (3)
- Grid-based map thinning. A grid-based map can be modeled as a binary image. Because each cell in a grid-based map acts as a pixel in an image, and the accessible status of a cell responds to the 0–1 status of a pixel in a binary image. Thus, image thinning algorithms such as the Zhang–Suen thinning algorithm can be directly applied to thin grid-based maps, which outputs the skeletons of the grid-based maps.
- (4)
- Topological map enhancement. A topological map is used to modeled the cross-floor indoor paths in Section 4. Each entrance of a cross-floor architectural component links to a cell in the generated hybrid map. An A-star algorithm is executed to compute the shortest path from the entrance cell to its nearest cell covered by the topological map. The obtained path is one topological path to the cross-layer architectural component. When topological paths to all entrances of all cross-layer architectural components are generated, the floor-level maps are ready to form a complete 3D indoor map jointly with cross-floor indoor paths.
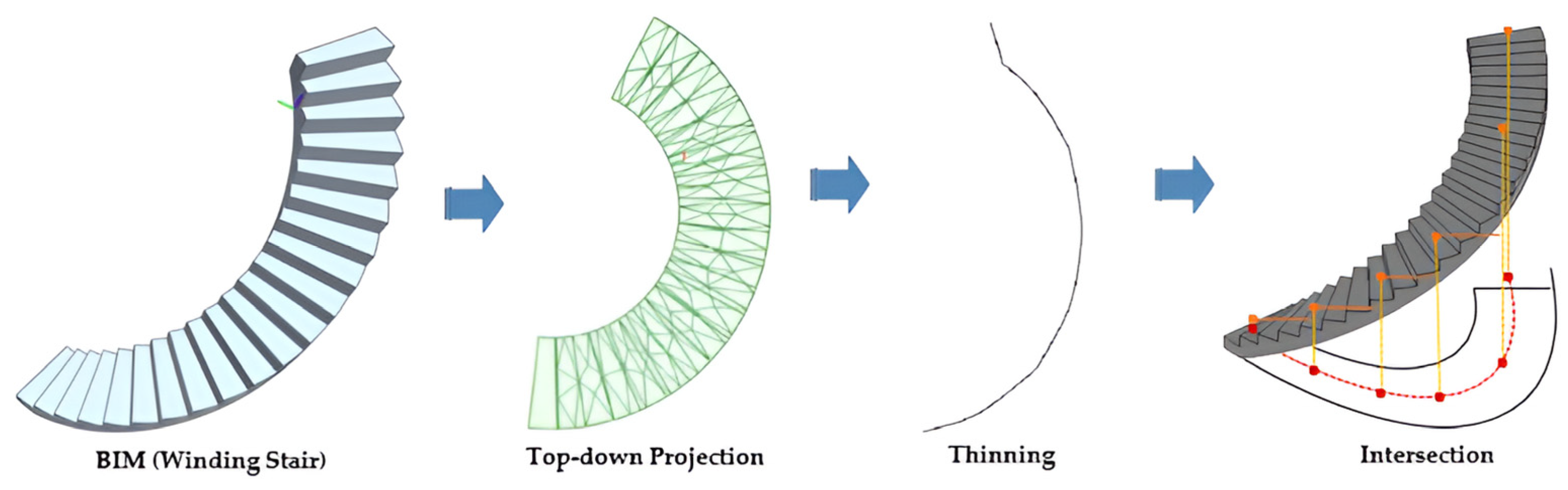
4. Cross-Floor Path Generation Utilizing Image Thinning
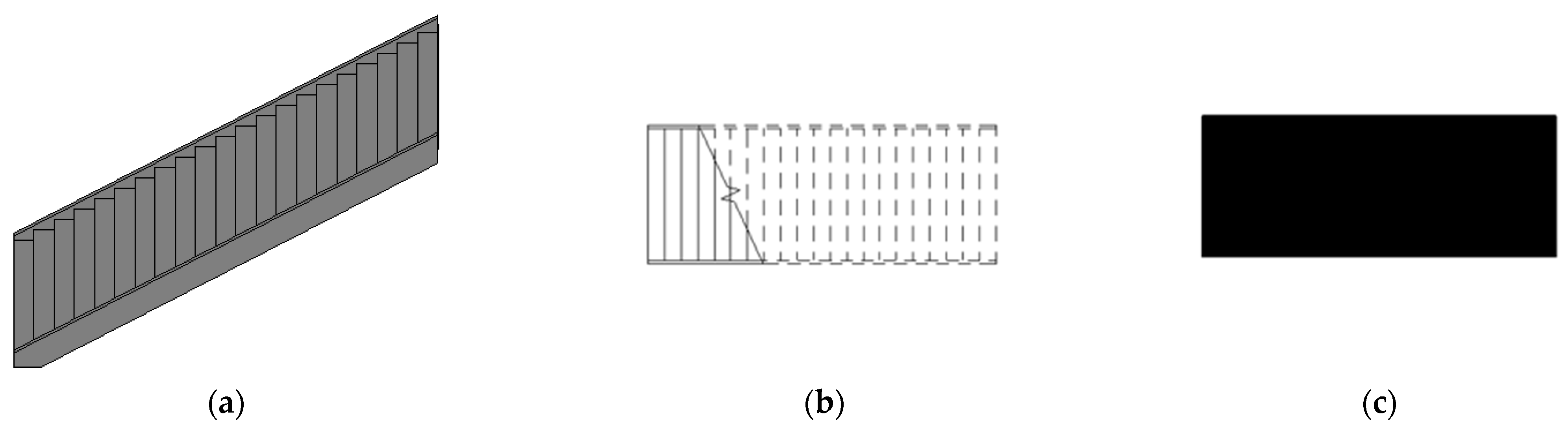
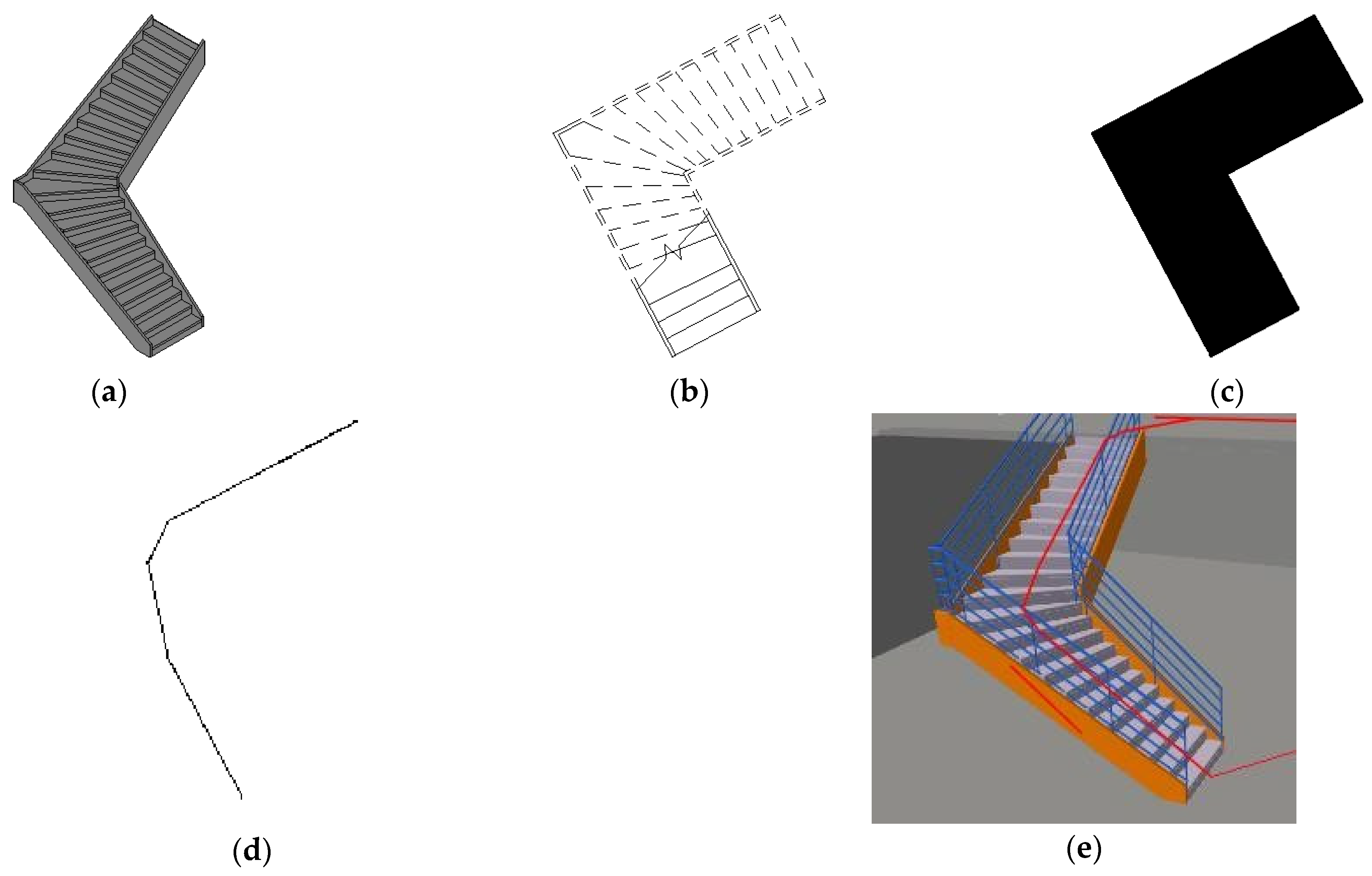
4.1. Top-Down Projection
4.2. Projection Thinning
4.3. Projection–BIM Intersection
5. Experiments
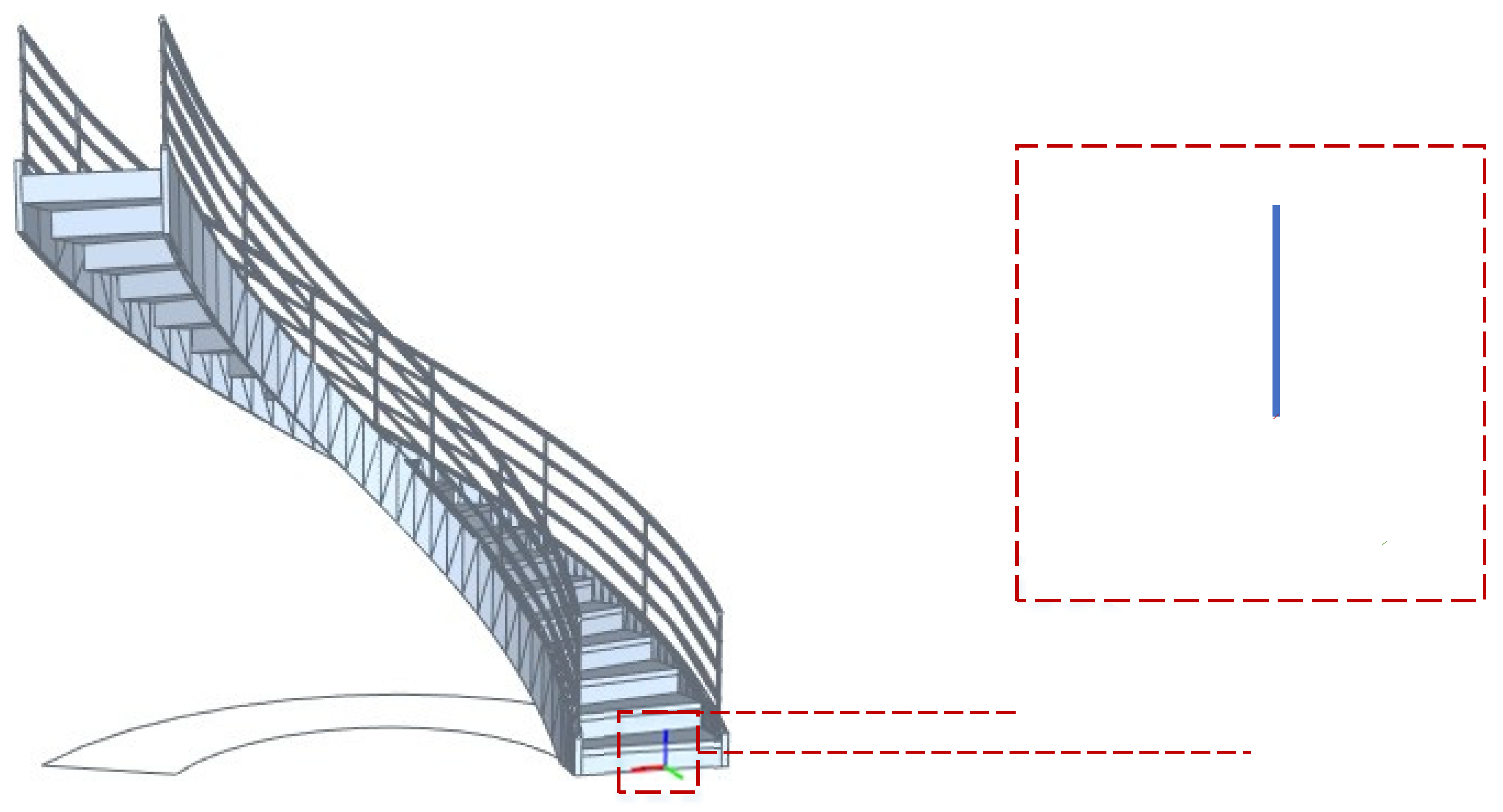
5.1. Cross-Layer Architectural Component Evaluation
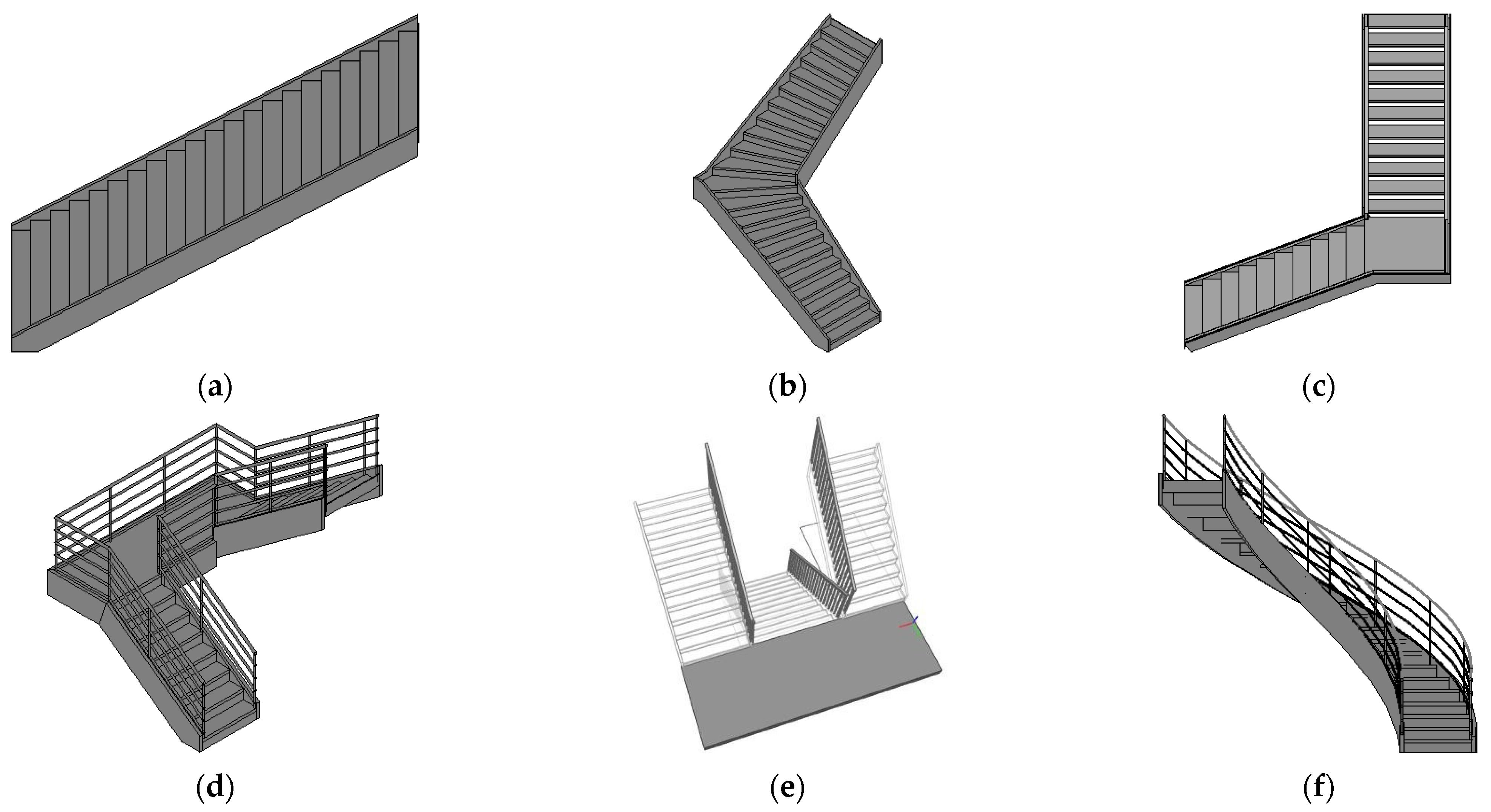
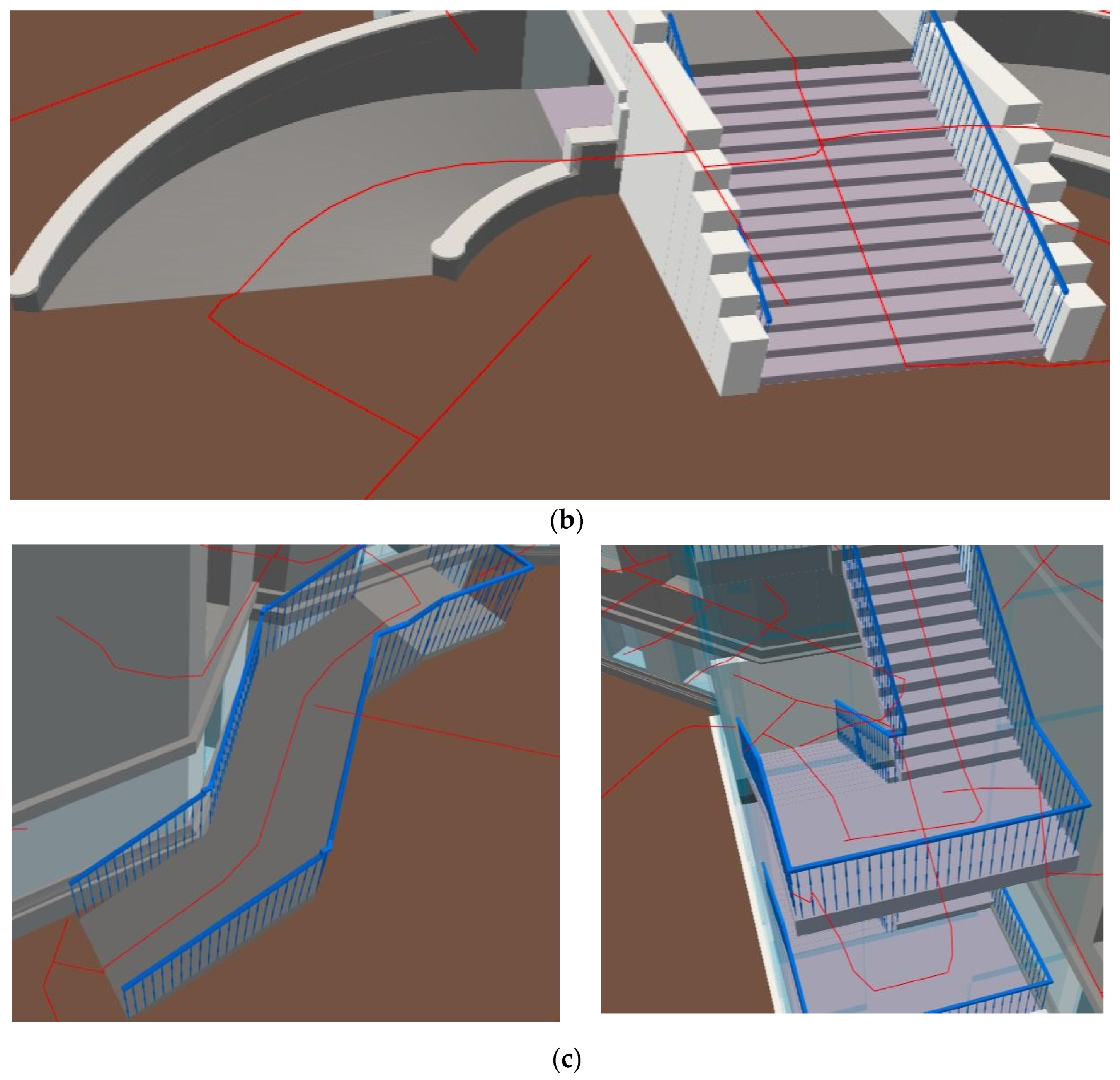
5.1.1. Stairs
5.1.2. Ramps
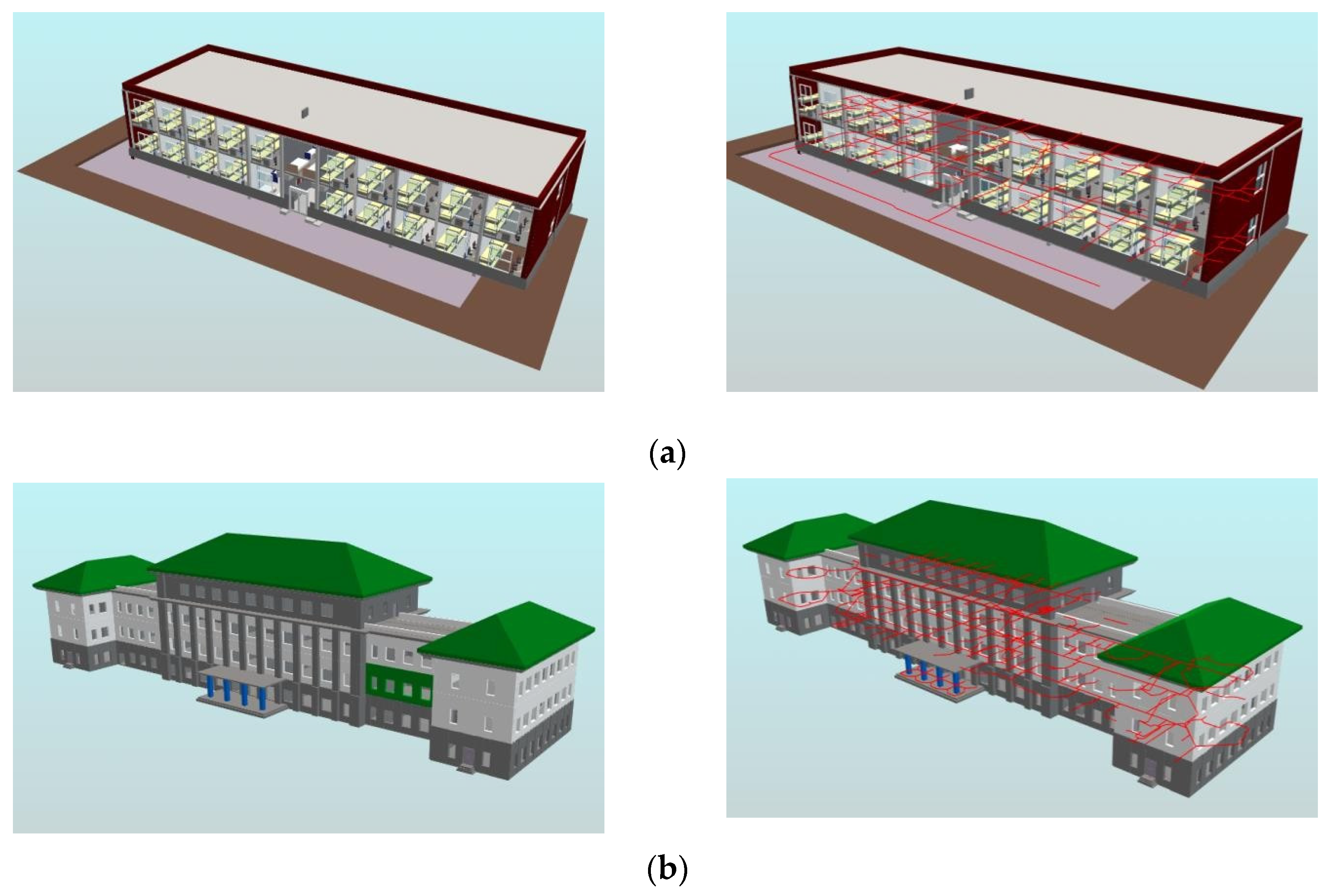
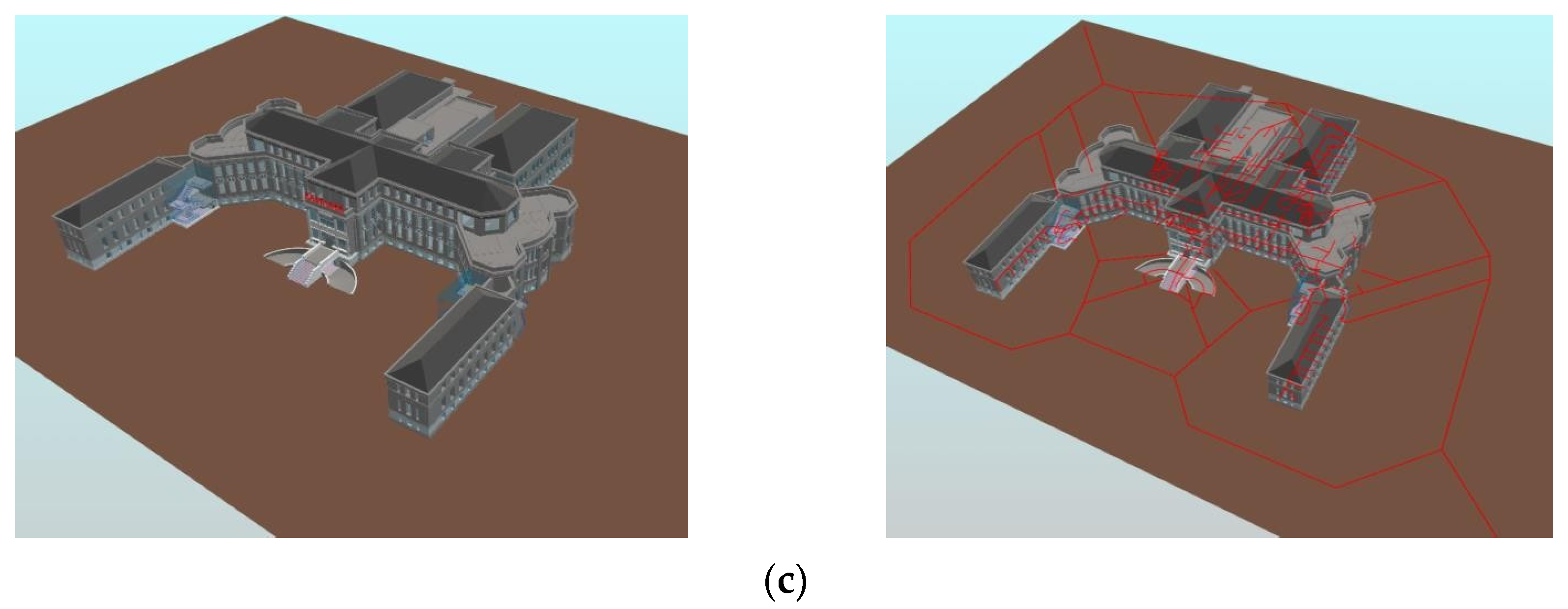
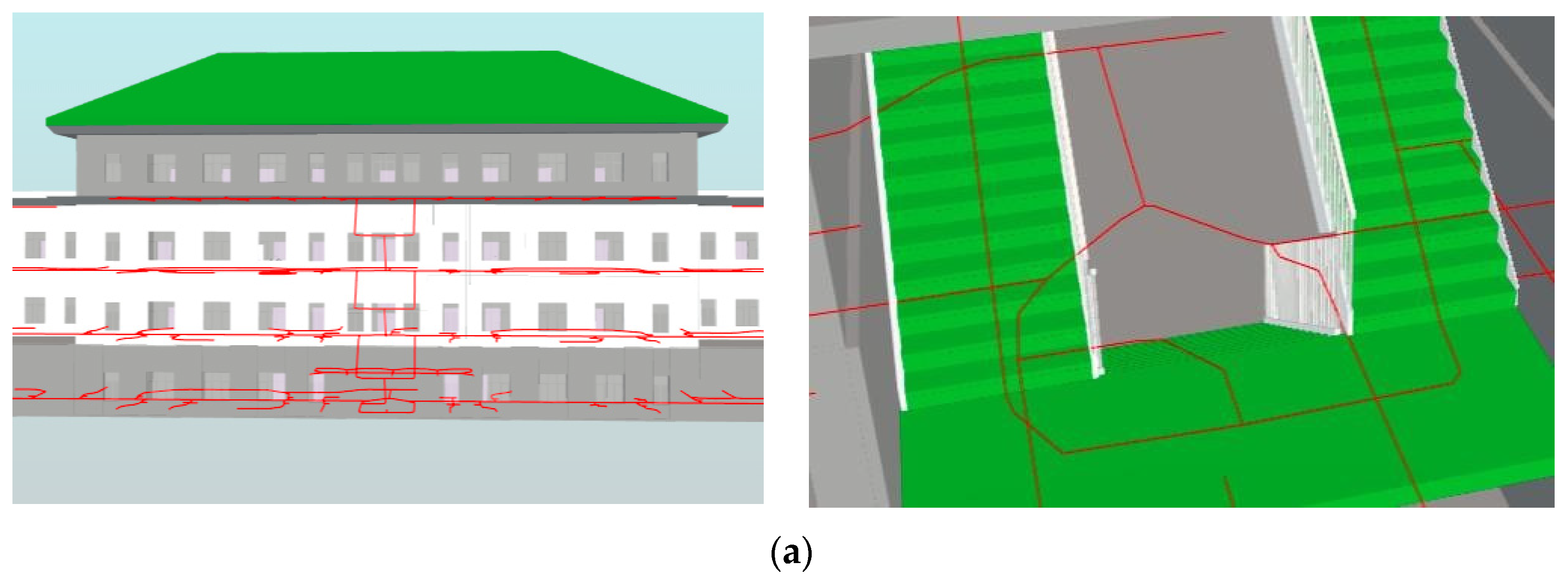
5.2. Multi-Floor BIM Model Evaluation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, X.; Li, H.; Wang, J.; Zhao, J.; Xie, Q.; Li, L.; Liu, J.; Yu, J. CloudFAS: Cloud-based building fire alarm system using Building Information Modelling. J. Build. Eng. 2022, 53, 104571. [Google Scholar] [CrossRef]
- Zhou, X.; Xie, Q.; Guo, M.; Zhao, J.; Wang, J. Accurate and efficient indoor wayfinding based on building information modeling data. IEEE Trans. Ind. Inform. 2020, 16, 7459–7468. [Google Scholar] [CrossRef]
- Chen, A.Y.; Huang, T. Toward BIM-enabled decision making for in-building response missions. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2765–2773. [Google Scholar] [CrossRef]
- Pang, Y.; Zhou, L.; Lin, B.; Lv, G.; Zhang, C. Generation of navigation networks for corridor spaces based on indoor visibility map. Int. J. Geogr. Inf. Sci. 2020, 34, 177–201. [Google Scholar] [CrossRef]
- Teo, T.-A.; Cho, K.-H. BIM-oriented indoor network model for indoor and outdoor combined route planning. Adv. Eng. Inform. 2016, 30, 268–282. [Google Scholar] [CrossRef]
- Fernández-Caramés, C.; Serrano, F.J.; Moreno, V.; Curto, B.; Rodríguez-Aragón, J.F.; Alves, R. A real-time indoor localization approach integrated with a Geographic Information System (GIS). Robot. Auton. Syst. 2016, 75, 475–489. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, K.; Wang, J.; Zhao, J.; Feng, C.; Yang, Y.; Zhou, W. Computer Vision Enabled Building Digital Twin Using Building Information Model. IEEE Trans. Ind. Inform. 2022, 19, 2684–2692. [Google Scholar] [CrossRef]
- Lin, Y.-H.; Liu, Y.-S.; Gao, G.; Han, X.-G.; Lai, C.-Y.; Gu, M. The IFC-based path planning for 3D indoor spaces. Adv. Eng. Inform. 2013, 27, 189–205. [Google Scholar] [CrossRef] [Green Version]
- Lin, W.Y.; Lin, P.H. Intelligent generation of indoor topology (i-GIT) for human indoor wayfinding based on IFC models and 3D GIS technology. Autom. Constr. 2018, 94, 340–359. [Google Scholar] [CrossRef]
- Taneja, S.; Akinci, B.; Garrett, J.H., Jr.; Soibelman, L. Algorithms for automated generation of navigation models from building information models to support indoor map-matching. Autom. Constr. 2016, 61, 24–41. [Google Scholar] [CrossRef] [Green Version]
- Chen, A.Y.; Chu, J.C. TDVRP and BIM integrated approach for in-building emergency rescue routing. J. Comput. Civ. Eng. 2016, 30, C4015003. [Google Scholar] [CrossRef]
- Cheng, J.C.; Chen, K.; Wong, P.K.-Y.; Chen, W.; Li, C.T. Graph-based network generation and CCTV processing techniques for fire evacuation. Build. Res. Inf. 2021, 49, 179–196. [Google Scholar] [CrossRef]
- Candra, A.; Budiman, M.A.; Hartanto, K. Dijkstra’s and a-star in finding the shortest path: A tutorial. In Proceedings of the 2020 International Conference on Data Science, Artificial Intelligence, and Business Analytics (DATABIA), Medan, Indonesia, 6–17 July 2020; pp. 28–32. [Google Scholar]
- Yang, L.; Worboys, M. Generation of navigation graphs for indoor space. Int. J. Geogr. Inf. Sci. 2015, 29, 1737–1756. [Google Scholar] [CrossRef] [Green Version]
- Ma, Y.; Zheng, G.; Perruquetti, W. Cooperative path planning for mobile robots based on visibility graph. In Proceedings of the 32nd Chinese Control Conference, Xi’an, China, 26–28 July 2013; pp. 4915–4920. [Google Scholar]
- Haunert, J.-H.; Sester, M. Area collapse and road centerlines based on straight skeletons. GeoInformatica 2008, 12, 169–191. [Google Scholar] [CrossRef]
- Bruck, J.; Gao, J.; Jiang, A. MAP: Medial axis based geometric routing in sensor networks. In Proceedings of the 11th Annual International Conference on Mobile Computing and Networking, San Diego, CA, USA, 17–21 July 2005; pp. 88–102. [Google Scholar] [CrossRef]
- Lee, J. A spatial access-oriented implementation of a 3-D GIS topological data model for urban entities. GeoInformatica 2004, 8, 237–264. [Google Scholar] [CrossRef]
- Fu, M.; Liu, R.; Qi, B.; Issa, R.R. Generating straight skeleton-based navigation networks with Industry Foundation Classes for indoor way-finding. Autom. Constr. 2020, 112, 103057. [Google Scholar] [CrossRef]
- Lin, W.Y. Automatic generation of high-accuracy stair paths for straight, spiral, and winder stairs using IFC-based models. ISPRS Int. J. Geo-Inf. 2020, 9, 215. [Google Scholar] [CrossRef] [Green Version]
- Lam, L.; Lee, S.-W.; Suen, C.Y. Thinning methodologies-a comprehensive survey. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 869–885. [Google Scholar] [CrossRef] [Green Version]
- Sudarma, M.; Sutramiani, N.P. The thinning Zhang-Suen application method in the image of Balinese scripts on the papyrus. Int. J. Comput. Appl. 2014, 91, 9–13. [Google Scholar] [CrossRef]
- BuildingSMART, Industry Foundation Classes IFC2x Edition 3 Technical Corrigendum 1. Available online: http://www.buildingsmart-tech.org/ifc/IFC2x3/TC1.html (accessed on 4 April 2023).
- Afyouni, I.; Ray, C.; Claramunt, C. Spatial models for context-aware indoor navigation systems: A survey. J. Spat. Inf. Sci. 2012, 4, 85–123. [Google Scholar] [CrossRef] [Green Version]
- Chen, Q.; Liu, G.; Ma, X.; Mariethoz, G.; He, Z.; Tian, Y.; Weng, Z. Local curvature entropy-based 3D terrain representation using a comprehensive Quadtree. ISPRS J. Photogramm. Remote Sens. 2018, 139, 30–45. [Google Scholar] [CrossRef]
- Oğuz, O.; Durupınar, F.; Güdükbay, U. Dynamic point-region quadtrees for particle simulations. Inf. Sci. 2013, 218, 133–145. [Google Scholar] [CrossRef] [Green Version]
- Eppstein, D.; Goodrich, M.T.; Sun, J.Z. The skip quadtree: A simple dynamic data structure for multidimensional data. In Proceedings of the Twenty-First Annual Symposium on Computational Geometry, Pisa, Italy, 6–8 June 2005; pp. 296–305. [Google Scholar] [CrossRef]
- Remolina, E.; Kuipers, B. Towards a general theory of topological maps. Artif. Intell. 2004, 152, 47–104. [Google Scholar] [CrossRef] [Green Version]
- Wallgrün, J.O. Autonomous construction of hierarchical voronoi-based route graph representations. In Proceedings of the Spatial Cognition IV. Reasoning, Action, Interaction: International Conference Spatial Cognition 2004, Frauenchiemsee, Germany, 11–13 October 2004; pp. 413–433. [Google Scholar] [CrossRef]
- Kneidl, A.; Borrmann, A.; Hartmann, D. Generation and use of sparse navigation graphs for microscopic pedestrian simulation models. Adv. Eng. Inform. 2012, 26, 669–680. [Google Scholar] [CrossRef]
- Boissonnat, J.-D.; Dyer, R.; Ghosh, A. Delaunay triangulation of manifolds. Found. Comput. Math. 2018, 18, 399–431. [Google Scholar] [CrossRef]
- Mortari, F.; Zlatanova, S.; Liu, L.; Clementini, E. “Improved geometric network model” (ignm): A novel approach for deriving connectivity graphs for indoor navigation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 45. [Google Scholar] [CrossRef] [Green Version]
- Xiong, Q.; Zhu, Q.; Du, Z.; Zhu, X.; Zhang, Y.; Niu, L.; Li, Y.; Zhou, Y. A dynamic indoor field model for emergency evacuation simulation. ISPRS Int. J. Geo-Inf. 2017, 6, 104. [Google Scholar] [CrossRef]
- Tsiliakou, E.; Dimopoulou, E. 3D Network Analysis for Indoor Space Applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLII-2/W2, 147–154. [Google Scholar] [CrossRef] [Green Version]
- Li, K.-J.; Conti, G.; Konstantinidis, E.; Zlatanova, S.; Bamidis, P. OGC IndoorGML: A standard approach for indoor maps. In Geographical and Fingerprinting Data to Create Systems for Indoor Positioning and Indoor/Outdoor Navigation; Elsevier: Amsterdam, The Netherlands, 2019; pp. 187–207. [Google Scholar] [CrossRef]
- Saeed, K.; Tabędzki, M.; Rybnik, M.; Adamski, M. K3M: A universal algorithm for image skeletonization and a review of thinning techniques. Int. J. Appl. Math. Comput. Sci. 2010, 20, 317–335. [Google Scholar] [CrossRef]
- Abeysinghe, S.; Ju, T.; Baker, M.L.; Chiu, W. Shape modeling and matching in identifying 3D protein structures. Comput. Aided Des. 2008, 40, 708–720. [Google Scholar] [CrossRef]
- Bucksch, A. A practical introduction to skeletons for the plant sciences. Appl. Plant Sci. 2014, 2, 1400005. [Google Scholar] [CrossRef] [PubMed]
- Groher, M.; Zikic, D.; Navab, N. Deformable 2D-3D registration of vascular structures in a one view scenario. IEEE Trans. Med. Imaging 2009, 28, 847–860. [Google Scholar] [CrossRef] [PubMed]
- Xie, X.; Lu, H.; Pedersen, T.B. Efficient distance-aware query evaluation on indoor moving objects. In Proceedings of the 2013 IEEE 29th International Conference on Data Engineering (ICDE), Brisbane, Australia, 8–12 April 2013; pp. 434–445. [Google Scholar] [CrossRef] [Green Version]
- Hartmann, T.; Trappey, A. Advanced Engineering Informatics-Philosophical and methodological foundations with examples from civil and construction engineering. Dev. Built Environ. 2020, 4, 100020. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Name | Accuracy of 2D Topological Map | Accuracy of 3D Topological Map | ||||
|---|---|---|---|---|---|---|---|
| Generated Length (cm) | Actual Length (cm) | Accuracy (%) | Generated Length (cm) | Actual Length (cm) | Accuracy (%) | ||
| Stair | Straight | 526.19 | 526.19 | 100 | 603.29 | 660.96 | 100 |
| Turn | 538.58 | 560.57 | 96.35 | 623.33 | 688.67 | 97.56 | |
| L-style | 597.65 | 603.29 | 99.10 | 1112.54 | 723.84 | 98.94 | |
| n-style | 621.89 | 623.33 | 99.77 | 421.61 | 738.19 | 99.84 | |
| m-style | 1089.20 | 1112.54 | 97.90 | 1362.03 | 1324.04 | 97.13 | |
| Winding | 463.20 | 421.61 | 90.14 | 538.54 | 515.26 | 95.48 | |
| Ramp | Straight | 1090.00 | 1090.00 | 100 | 1161.08 | 1161.08 | 100 |
| Curved | 1279.99 | 1188.04 | 92.26 | 1277.24 | 1261.33 | 98.74 | |
| # | Name | Usage | Floors | Stair Flights | Ramps Flights |
|---|---|---|---|---|---|
| 1 | Dormitory | Loading | 2 | 3 | 0 |
| 2 | School Building | Research | 4 | 17 | 0 |
| 3 | Peking University People’s Hospital | Hospital | 4 | 29 | 0 |
| Building | # of Pairs of POIs | Length of Generated Route (cm) | Length of Real Route (cm) | Precision of Two POIs (%) | Accuracy |
|---|---|---|---|---|---|
| Dormitory | 1 | 1535.51 | 1463.22 | 95.06 | 88.17 |
| 2 | 2204.18 | 1995.37 | 89.54 | ||
| 3 | 3706.55 | 3422.58 | 91.70 | ||
| 4 | 2602.49 | 2203.95 | 81.92 | ||
| 5 | 4637.29 | 3951.66 | 82.65 | ||
| School Building | 1 | 2941.00 | 2830.78 | 96.11 | 86.64 |
| 2 | 1769.62 | 1497.79 | 81.85 | ||
| 3 | 4109.66 | 3801.85 | 91.90 | ||
| 4 | 2773.75 | 2341.14 | 81.52 | ||
| 5 | 4044.27 | 3422.33 | 81.83 | ||
| Hospital | 1 | 1503.88 | 1398.54 | 92.47 | |
| 2 | 1767.52 | 1493.72 | 81.67 | ||
| 3 | 2689.31 | 2304.59 | 83.31 | 86.05 | |
| 4 | 3598.44 | 3049.76 | 82.01 | ||
| 5 | 4503.89 | 4123.26 | 90.77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Wang, Y.; Zhou, X. Automatic Generation of 3D Indoor Navigation Networks from Building Information Modeling Data Using Image Thinning. ISPRS Int. J. Geo-Inf. 2023, 12, 231. https://doi.org/10.3390/ijgi12060231
Zhang W, Wang Y, Zhou X. Automatic Generation of 3D Indoor Navigation Networks from Building Information Modeling Data Using Image Thinning. ISPRS International Journal of Geo-Information. 2023; 12(6):231. https://doi.org/10.3390/ijgi12060231
Chicago/Turabian StyleZhang, Weisong, Yukang Wang, and Xiaoping Zhou. 2023. "Automatic Generation of 3D Indoor Navigation Networks from Building Information Modeling Data Using Image Thinning" ISPRS International Journal of Geo-Information 12, no. 6: 231. https://doi.org/10.3390/ijgi12060231