

Dynamic Weighted Road Network Based Multi-Vehicles Navigation and Evacuation

College of Computer Science, Beijing University of Technology, Beijing 100124, China
*
Author to whom correspondence should be addressed.
ISPRS Int. J. Geo-Inf. 2023, 12(3), 127; https://doi.org/10.3390/ijgi12030127
Submission received: 23 December 2022
/
Revised: 10 March 2023
/
Accepted: 12 March 2023
/
Published: 16 March 2023
Abstract
:Many events such as large-scale activities and traffic accidents could cause an increase in vehicle density in an area, which makes the evacuation of vehicles important. However, the existing evacuation methods are not efficient limit to multi-vehicles sequences or destinations. In this paper, we introduce a novel dynamic weighted road network model for route planning. Based on the model, the route planning algorithm can obtain higher search efficiency while avoiding congested roads. For multi-vehicles evacuation, we propose a spatial diversity theory to evaluate the overlaps of routes between vehicles to be evacuated and those already evacuated. To verify the efficiency and effectiveness of our model, we conducted experiments on real road network. The results showed that our methods and algorithms can provide more reasonable paths and manage the process more efficiently.
1. Introduction
The rapid growth of car ownership in cities [1], as well as the accumulation of vehicles due to activities and accidents, has caused a slew of issues for the public transportation system. However, the limitation of the city’s road network capacity cannot meet the growing traffic demand, which leads to the further deterioration of travel conditions and a waste of time and resources [2]. Considering that the road network capacity is difficult to increase in practice, effectively planning vehicle travel and evacuation through algorithms has become a new research hotspot.
Currently, there is a high demand for city navigation to avoid congestion and improve traffic efficiency. With improvements in intelligent transport systems (ITS) [3], many advanced technologies have been used to detect road conditions [4,5,6], making it possible to obtain information about traffic jams. As a result, many navigation algorithms have been proposed that take into account the congestion on the road network [7,8,9]. However, most of these algorithm-based methods are difficult to be directly incorporated into other algorithms, resulting in significant limitations. In fact, navigation can be represented as a route planning problem in the road network, which means that the construction of road network model has a great influence on it. In order to improve the navigation effectiveness from the perspective of the road network, Song et al. [10] converted road weights to the actual time it takes for a vehicle to cross. Liu et al. [8] calculated flow collision probability and road congestion probability, redefining the weight of the road. However, these methods calculate the weights of all roads in the road network, resulting in a low algorithm efficiency. Moreover, the impact of congested roads on route planning varies with their distance from vehicles.
The studies in [11] have found that when one or more sections of the road network experience reduced capacity or temporary failure, the chain of failure may eventually lead to the collapse of some sections or even the entire network. Consequently, vehicle evacuation algorithms also play an important role in avoiding congestion and have become a hot topic of research for many experts and researchers [12,13]. In conclusion, vehicle evacuation can be expressed as a scheduling problem of travel sequence with a single start and multiple destinations. In a previous study, we proposed a multi-vehicle dynamic evacuation algorithm based on spatial diversity [14]. However, it sorted the evacuated vehicles only according to the spatial position relationship of the destination, without considering the road conditions and the vehicle’s driving route.
In view of the aforementioned limitations, we proposed a weighted road network model and a evacuation algorithm for multiple vehicles based on route diversity. The contributions of this paper are as follows.
- 1.
- From the perspective of vehicles, we propose a dynamic weighted road network model. In this model, road weights change dynamically based on the real-time position of the vehicle. When planning a route based on the road network model, the algorithm will only consider congestion within a certain range from the vehicle. By utilizing this model, any navigation algorithm based on graph search will be able to improve search efficiency while avoiding congestion.
- 2.
- We propose to use route diversity to evaluate the similarity between routes of different vehicles. This, combined with the fact that vehicles have the same starting point when evacuating, can help achieve a more balanced distribution of evacuated vehicles across the road network and reduce congestion.
The rest of this paper is organized as follows. Section 2 reviews the related work. Section 3 introduces the dynamic weighted road network model. Section 4 illustrates the multi-vehicle dynamic evacuation algorithm based on route diversity. Section 5 clarifies the experimental results and presents the analysis. Finally, Section 6 concludes the paper and gives future work.
2. Related Work
In this section, we present an overview of related work. We survey the researcher’s studies on urban navigation, covering both navigation algorithms and road network construction. Then, we review the relevant research on the evacuation.
2.1. The Study on Navigation Algorithms
Navigation algorithm, as an important research problem in the field of traffic management. The problem is reduced to finding a path between two points in the road network [15]. Many algorithms have been developed for navigation and route planning, such as A-Star based algorithms [16,17,18,19], ant-based algorithm, neural network approaches [20,21], neural network approaches [22,23,24] etc. Song et al. [25] proposed an improved algorithm, which was applied to the Springer USV. The paper developed a new path-smoothing process with three path smoothers to improve the performance of the generated route, reducing unnecessary ‘jags’, having no redundant waypoints and offering a more continuous route. Zheng et al. [26] obtained a minimum image set, including camera shooting positions and attitudes and then determined a specific flight route network for route planning. Jeong et al. [27] assessed the navigational traffic risk of a route using a model of a ship. Then, they visualized a risk contour map by structuring the data as absolute danger, hazard factors, and influential factors, which is a framework for route planning. However, these aforementioned navigation methods and route-planning algorithms are developed for unmanned surface vehicles, UAV, maritime transportation, which is not suitable for vehicle navigation in a city.
For navigation in urban road networks, there some methods have been proposed. Some researches focus on the fastest path [28,29] or shortest path [24,30,31]. Guo et al. [32] improved the faster criterion in vehicle routing by extending the bi-delta distribution to the bi-normal distribution and verify the faster criterion’s superiority in determining the optimal path. Zuo et al. [24] form the path planning problem as the problem of inferring a sequence of nodes in a network path and adapt a sequence-to-sequence model to learn implicit forwarding paths based on empirical network traffic data. However, with more and more traffic vehicles in cities, the problem of traffic congestion becomes more serious. Some researchers begin to consider traffic congestion in road traffic planning. Ayla et al. [33] proposed a VANET network based on the fusion of inter-vehicle communication and vehicle road measurement equipment communication and conventional systems to obtain real-time traffic information of inter-city routes. Huang et al. [34] proposed a multi-tasking in-depth travel itinerary framework for more effective planning by integrating rich auxiliary information. Cai et al. [35] proposed a dynamic path planning algorithm based on vector extraction, using a cross-link analysis algorithm to calculate the real-time road conditions at intersections. To solve the problem of most vehicles follow the same navigation suggestion in a short period of time, Huang et al. [36] planned the travel path of the vehicle by combining the service level of the road network factors between vehicles.
Although the above studies have achieved good results in route planning, their research has focused more on the improvement of route planning algorithms and less on the construction of road networks. Additionally, the existing methods [10,37] construct the road network from a global perspective and fail to take into account the specific routes of vehicles. In order to fill this gap, we propose a weighted road network model that dynamically updates the road weight in the network according to the position of the vehicle.
2.2. The Study on Evacuation Algorithms
Evacuation planning is crucial to the safety of people’s lives and has attracted the attention of many researchers [38,39,40]. Some researchers investigated the panic psychology and behavior of evacuees in emergencies to improve the evacuation process [41]. Kinateder et al. [42] investigated the effects of exit familiarity and the egress behavior of other pedestrians on exit choice in an ambulatory virtual environment. The results show that exit familiarity and neighbor behavior influence evacuation behavior. Moreover, the paper [43] shows that gender, education level, and carry-on luggage have strong correlations with panic-related psychology and behaviors. Zhu et al. [44] predicted different social (crowd flow) and environmental (visual access and vertical movement) factors would affect individuals’ wayfinding behavior using machine learning and discrete choice models.
There are many methods that have been proposed for building evacuation [44,45,46]. The authors [47] present an intelligent evacuation system that combines the internet of things (IoT), fog layer, and cloud layer to recommend the optimal evacuation route for each traced evacuee. Wu et al. [48] proposed a novel method to find the earliest arrival path through a time-varying network for the evacuation planning of the mine water inrush. However, these methods may not be applicable for outdoor crowd evacuation scenarios.
Furthermore, the evacuation of emergency traffic is also a hotspot for many researchers. References [49,50,51] focus on solving the evacuation paths with the minimum evacuation time. Zheng et al. [52] discussed the optimal zonal vehicle evacuation strategy based on optimal simulation. Then, the strategy of optimal vehicle evacuation was obtained by solving the fastest problem. Johnathan et al. [53] proposed a diversity-based path planning algorithm based on the variant algorithm. They proposed an iterative segmentation planner that generates a set of spatially distinct paths by iteratively planning the segments of all paths in a sequential manner. Ahmed et al. [54] proposed a multi-objective vehicle path planning method that uses an elite non-dominated ranking genetic algorithm (a well-known soft computing method) to optimize path length, path safety and path smoothness.
In the previous study, we proposed a theory of spatial diversity [14] based on the relative positions of the evacuation centers and ends of the vehicles to be driven. The core of the proposed algorithm is as follows.
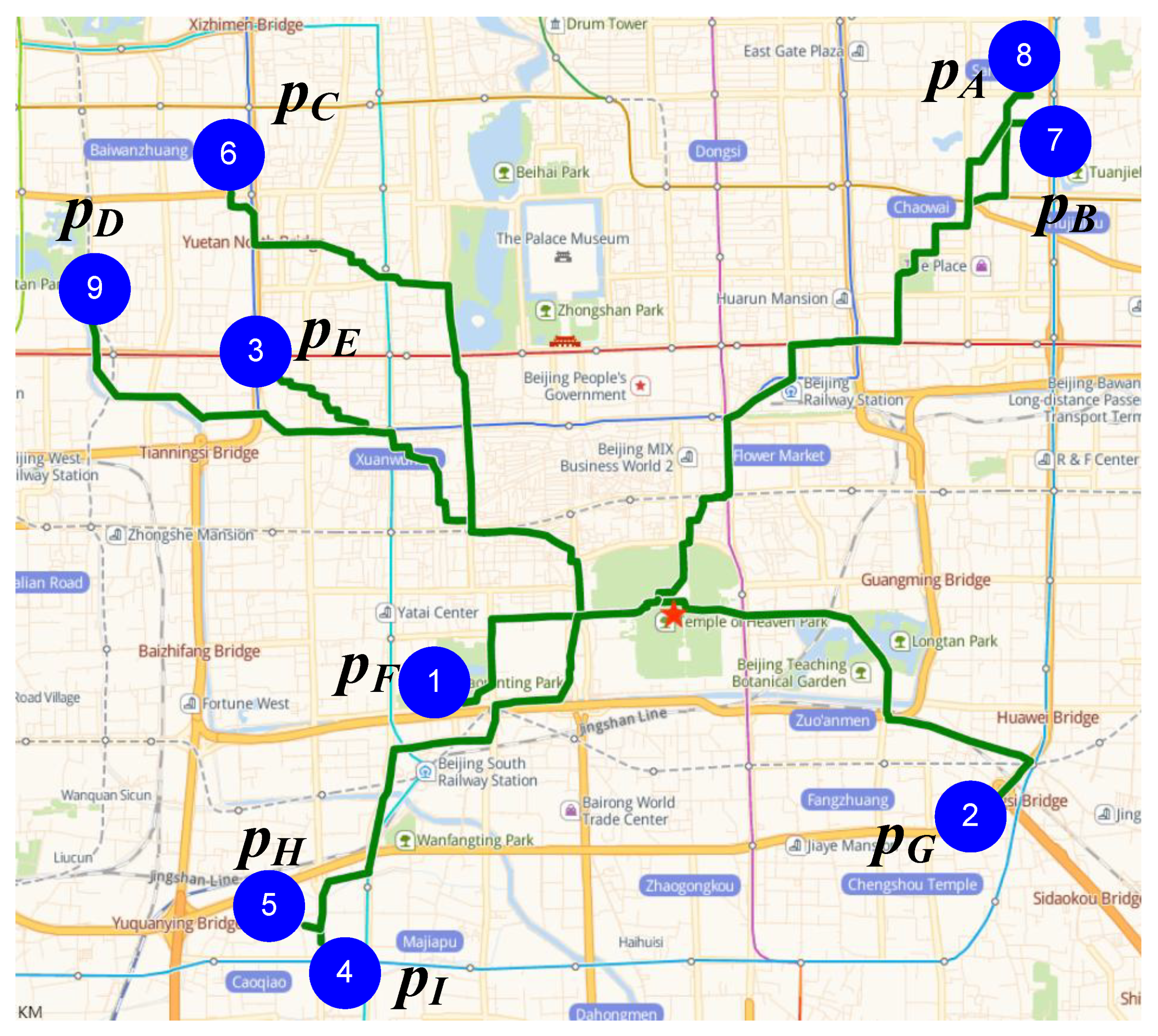
Among them, Equation (1) ensures that the current position p has the weakest directional correlation with positions which are destinations of already planned vehicles, and Equation (2) ensures that the one with a close destination in the same direction is preferred for planning. Then, we randomly selected nine cars for evacuation, and the results are shown in Figure 1. The pentagram indicates the evacuation center and p indicates the end of the corresponding vehicle, shown in the blue circle. The numbers in the circles are the order in which the vehicles were evacuated. Under the theory above, the was chosen first, as it is the closest to the evacuation center. Moreover, the was planning after because they have a weak directional correlation. However, by the route (green line in the figure), we could find that although has a large difference with in spatial distribution, its driving trajectory and completely overlap in the starting part. While at the same moment, and are completely different from and . Therefore, the should be the best choice at that moment.
In order to solve the shortcomings of the above theories in emergency traffic, this paper proposes a new vehicle evacuation algorithm from the perspective of the travel route of congested vehicles by combining the characteristics of the road network and evacuation destination.
3. Dynamic Weighted Road Network Model
Considering dynamic and complex nature of traffic data, we propose a dynamic weighted road network model from the perspective of vehicle for route planning in urban road networks. This model takes into account the real-time traffic data and the position of the vehicle, which can dynamically adjust the weights of the road segments within a certain range of the vehicle. By doing so, the model can improve the search efficiency of any navigation algorithm based on graph search while avoiding congestion. Furthermore, it is not necessary to consider all real-time traffic information when planning a route, as the model only focuses on the relevant road segments within a certain range from the vehicle. This approach can effectively reduce the complexity of the route planning problem and improve its scalability.
The urban road network can generally be represented by a weighted graph , where V denotes all nodes or intersections, indicates a collection of roads, and W is the set of all road weights. For road networks where traffic volumes are not taken into account, the road weight is usually expressed in terms of the length of the road or the time it takes a vehicle to cross the road. However, if a road is congested, it will take longer for vehicles to cross it. In this paper, we simulate congestion by expanding the length of the road while keeping the speed constant. We assume that the road has only two states: jam and free.
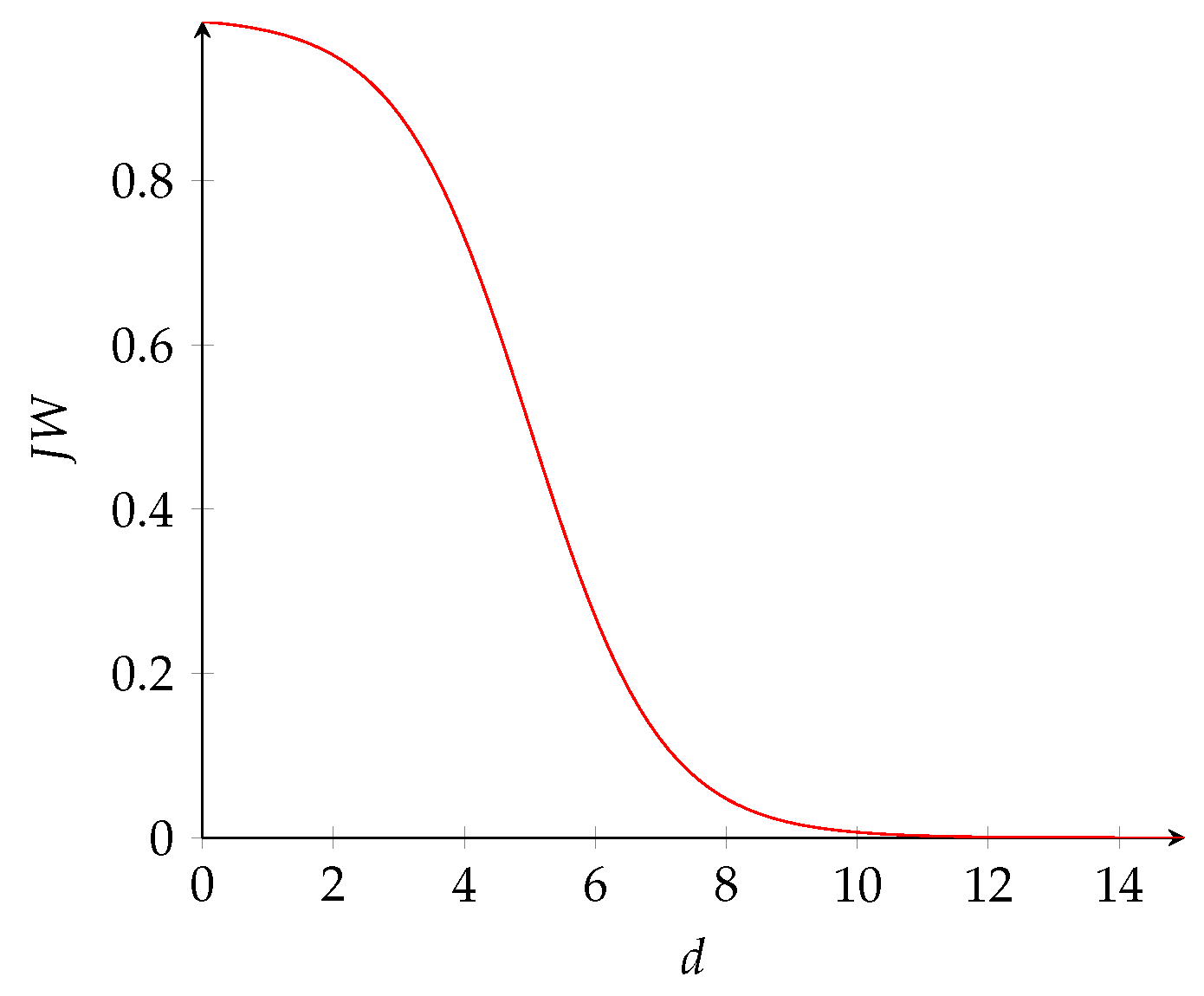
When we are traveling from one location on the road network to another, traffic jams at different distances from our location will have a different impact on the choice of route. Due to its monotonic, smoothing qualities, sigmod is frequently employed as an activation function for neural networks, automatically projecting variables between 0 and 1. Here, it is refined to analyze the effect of crowded roads on route planning and is expressed as the Equation (3) named (jam weight).
where d specifies the distance between the road and vehicle and represents a threshold within which the traffic status is important for route planning. The line graph for is shown in Figure 2. From Figure 2, the value of is relatively large when d is close to 0, which means that the crowded road has a big influence on route planning. When d exceeds the threshold , it rapidly declines until it is very close to 0.
In the model, for crowded roads, we add their influence on path planning to the road weight. After a series of experiments, the weight of roads in the road network is expressed as Equation (4).
where k implies the magnification, d means the distance from the crowded road to the vehicle, and denotes a road in the road network. It can be seen that when the congested road remains within the threshold , a smaller value of d means a larger value of , which leads to a larger increase in road length. In addition, when d exceeds the threshold , the value of will be close to 0 within a small interval of d. At this time, the expansion to length of roads is also almost 0. This exactly satisfies our assumption of not considering the roads outside the threshold range. The roads have different weights for different vehicles, which are related to their distance from the vehicle.
In the model, the weight of roads is mainly affected by the road length and parameters k and . When the road is congested, it takes longer for vehicles to cross the road. Under the condition that the speed remains constant, k is used to increase the length of the road to simulate the process. In the real road environment, the size of k can be dynamically adjusted according to different jam levels, congestion time and so on. The result of Equation (4) shows that the influence of k on road weight is basically limited to the threshold . When d is larger than , the c gradually decreases to close to 0, and the influence of k on road weight also gradually weakens. is an important indicator of , which represents the range of expected smooth roads. For city travel, the value of should be relatively small to ensure smooth travel considering the rapidly changing traffic flow. However, for intercity travel, a larger is preferable since we pay more attention to the overall travel status due to the longer travel distance.
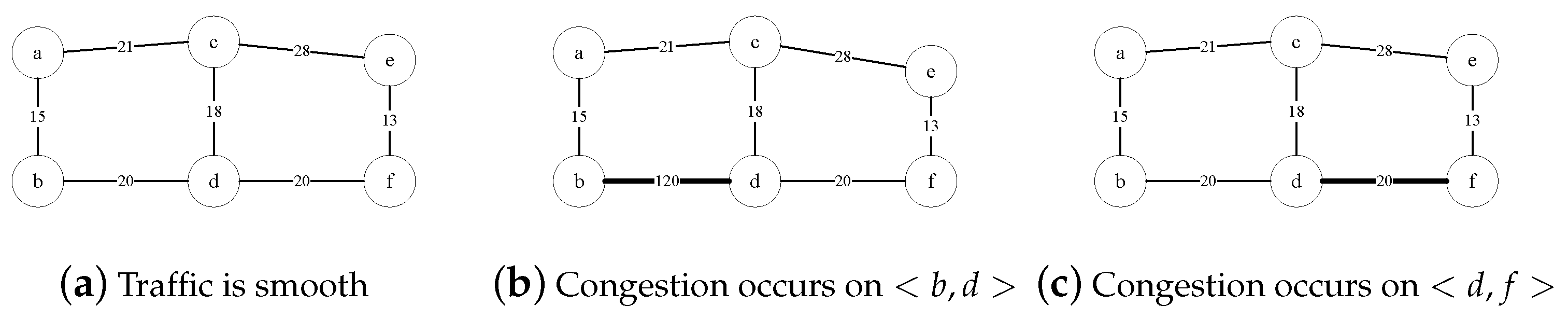
In the road network (unit: km) depicted in Figure 3, the start and end are a, f, respectively. When the traffic state is free, the weighted road network is illustrated in Figure 3a. We set and . When the road becomes congested, according to Equation (4), the weight of is , indicating that the congestion on road has a greater impact on route planning. However, when the road is congested, the weight is . Clearly, the congestion has little effect on route planning. From Figure 3, we observe that the road is far from the start a, which is why the current traffic situation on the road does not need to be taken into account.
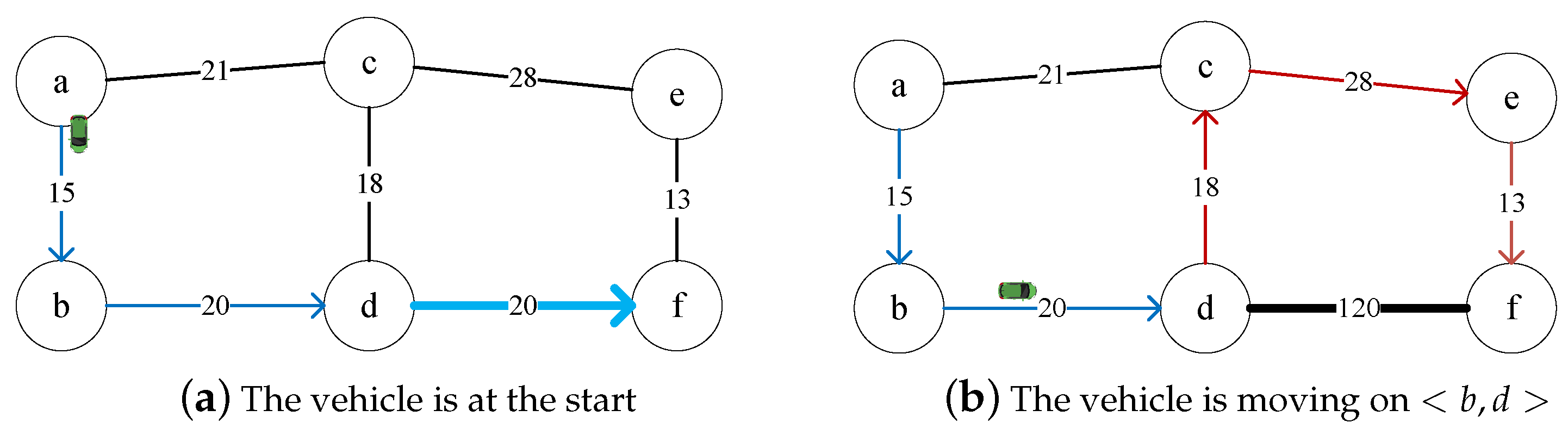
Figure 4 shows an example of route update using the data in Figure 3, assuming that road is congested. Figure 4a displays the state of the road network when a vehicle is located at the start. According to Equation (4), the actual weight of the road at this time is still about 20 km. The optimal route is , marked by the blue arrow in Figure 4a. When the vehicle is driving on the road, road congestion can be detected. If the road is still congested, the algorithm reconstructs the road network according to Equation (4). Suppose that the distance between intersection d and the vehicle is 15 km, and the weight of will be 120 km which means that the optimal path for the vehicle is indicated by the red arrow in Figure 4b. On the contrary, if the state of road is free at that time, the route update will not be carried out.
In this paper, the algorithm is utilized for path planning. Typically, in the algorithm, where signifies the actual cost of traveling from the start to the current, which is the sum of the cost from the start to the parent node and the cost from the parent node to itself. The estimated cost from the current position to the target point is represented by . The closer the node is to the end, the smaller the value of is, and the smaller the value of is. This ensures that the search progress towards the end if is maintained. The is the route planning method, and in this paper, the Euclidean distance is the heuristic function.
The model-based navigation algorithm can be represented as follows.
- 1.
- VDWR model is generated based on the location of the vehicle and the current traffic data.
- 2.
- While the vehicle is moving, the system automatically collects the road situation within the threshold .
- 3.
- If jammed roads are detected, the model is automatically updated and the optimal path is recalculated.
4. Multi-Vehicle Dynamic Evacuation Algorithm Based on Route Diversity
There have been many studies on reducing urban congestion caused by traffic accidents, natural disasters, etc. An effective method for vehicle evacuation helps to reduce pressure on the road network and avoid traffic congestion. In our previous study [14], we proposed a dynamic evacuation algorithm for multiple vehicles based on spatial diversity. However, as discussed in Section 2.2, this method had some shortcomings. To overcome these issues, we present a new approach for multi-vehicle evacuation based on route diversity, which is detailed in this section.
First, we propose the concept of route coincidence (), which represents the length of overlap part of the routes between vehicles. We assigned the route of vehicle p to the ordered set
and the route of vehicle s to the ordered set.
Then the route coincidence of vehicle p and s can be expressed as the Equation (5).
where , R denoted the set of roads in the road networks.
The smaller the value, the less the trajectory overlap between vehicles, which means that the distribution of vehicles in space is more balanced, and the possibility of road congestion is low. Therefore, we first obtain travel routes based on before evacuating. Then, we give priority to the vehicle closest to the evacuation center. For the remaining vehicles, we calculate the for each vehicle. The vehicle with the smallest is evacuated first.
During an evacuation, however, traffic is often more congested on roads closer to the evacuation center than on those further away. Therefore, when we calculate the , roads at different distances from the evacuation center are given different weights. We made the following improvements to the in the Equation (6).
As the number of vehicles increases, evacuation time tends to increase as well. Later vehicles tend to be less affected by the first evacuated vehicles since they are either far away from the evacuation center or have arrived at their destination. We sum all of the between the current vehicle and all planned vehicles. It was written as the Equation (7).
Then we average it to obtain Equation (8).
In the above two equations, p represents the vehicles to be evacuated, and Q represents the set of already evacuated vehicles.
If two vehicles have the same but different distances to the evacuation center, we also need to consider their priority. In this case, vehicles have a higher priority if their destination is closer to the evacuation center. This is due to the fact that the vehicle whose destination is closer to the evacuation center has a shorter travel distance, causing less pressure on the road network.
Finally, based on the ideas presented above, we proposed the theory of route diversity, which is expressed as the Equation (9).
where denotes the route diversity between vehicle p and already evacuated vehicles. A smaller value indicates not only more diversity, but also a higher priority in evacuation planning. denotes the distance from the destination of the vehicle to the evacuation center. represents the maximum of from all unplanned vehicles.
According to the theory of route diversity, when the value is higher, it indicates that the diversity of the route is smaller and the vehicle should have a lower priority in evacuation planning. As the evacuation progresses, the vehicles with greater time intervals between evacuations will have less impact on each other. When two or more vehicles have the same value, the vehicle with the closest destination to the evacuation center should be given higher priority as it will have a shorter travel time and less impact on the road network.
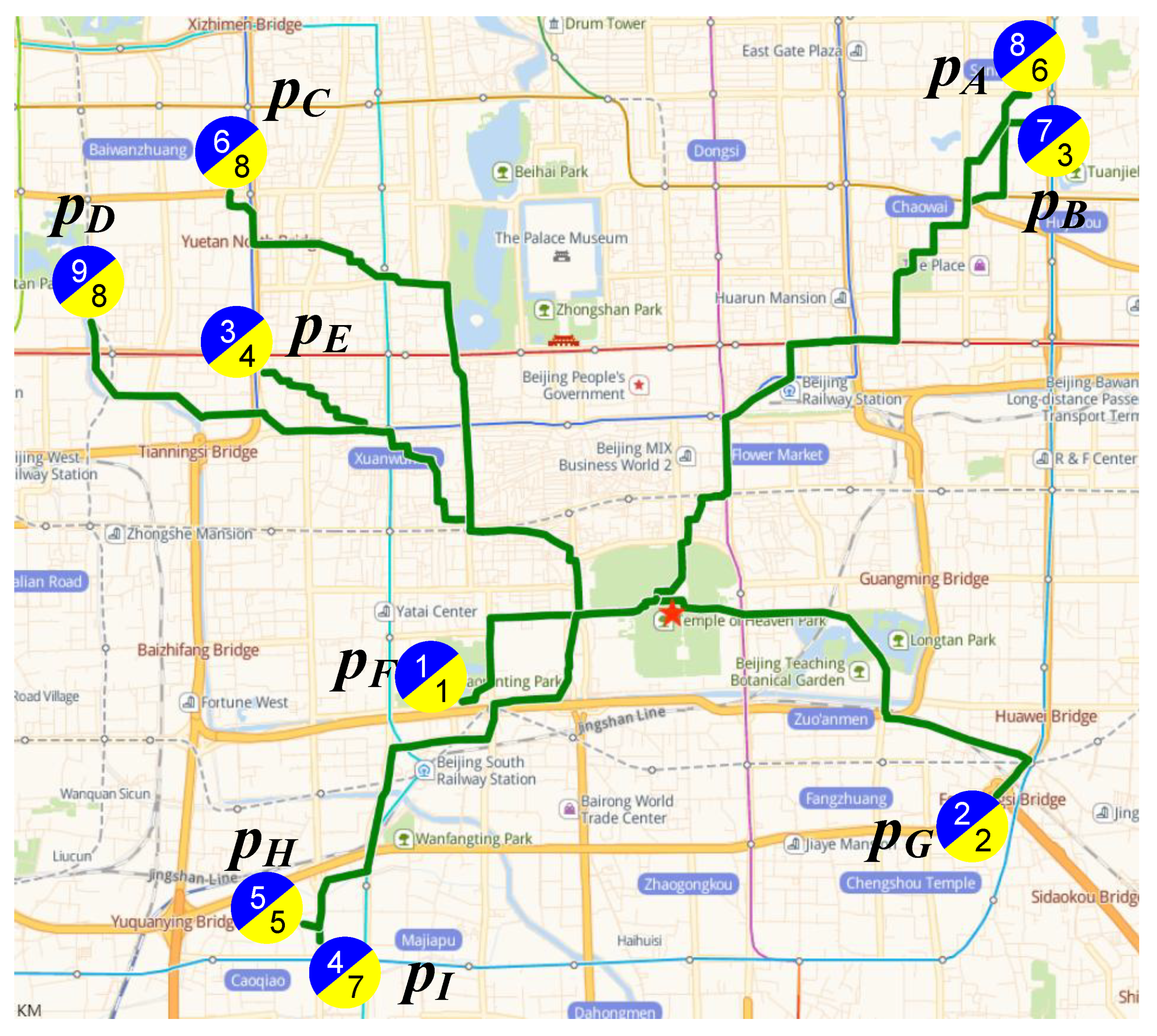
Using the nine positions in Figure 1 as the vehicle ends, we conducted experiments based on route diversity theory again. The evacuation order is shown in Figure 5, and the calculation process and selection of positions are shown in Table 1. The number in the blue semicircle is the evacuation order based on the spatial diversity algorithm, while the number in the yellow semicircle represents the evacuation order based on our newly proposed route diversity algorithm.
According to the idea of route diversity, we first choose the position that is nearest to the evacuation center, which is the same as the idea based on spatial diversity. As a result, both algorithms select first, as shown in Figure 5. In Table 1, the first row shows the distance of each position from the evacuation center. A big difference occurs at position , which ranks seventh in the spatial diversity-based algorithm, but third in our algorithm. After the , it can be seen from Figure 5 that only the trajectories of the and do not overlap with the and . According to the Equation (9), is given higher priority because of its smaller distance from the evacuation center, as shown in the third row of Table 1. For the remaining vehicles, we prioritized their evacuation orders according to the principle of route diversity.
In the following, we summarize the basic steps of the multi-vehicle dynamic evacuation algorithm based on route diversity.
- 1.
- We obtain information on the evacuation center and vehicle routes.
- 2.
- The evacuation order of vehicles was determined by the route diversity principle.
- 3.
- According to the route information, we check the status of each starting road. If it is crowded, the vehicles wait. Otherwise, evacuation is performed.
- 4.
- A single point navigation algorithm in Section 3 is used to achieve the path planning of each evacuation vehicle.
Next, we introduce the algorithms used in the above process.
In Algorithm 1, we introduced how to arrange the order of evacuation of vehicles. Firstly, we define a set to store vehicles to be evacuated (line 1). Then the vehicles are sorted by the distance between the end and the evacuation center, from smallest to largest (line 2). Then, we get the index of the next evacuated vehicle until the number of vehicles unplanned is 0 (line 3). First, if the is empty (line 4), we select the vehicle closest to the center as the first. Then we add it to the already planned set (line 5) and remove it from the unplanned set (line 6). If the list is not empty, the next vehicle is selected according to algorithm (line 9). Similarly, the selected vehicle is put into the already planned set (line 10) while being removed from the unplanned set (line 11). The algorithm will repeat this step until the set of unplanned vehicles is empty. Finally, we return the set of planned vehicles (line 14).
| Algorithm 1: DynamicEvacuation |
 |
Algorithm 2 is used to describe how to select the car with the smallest every time. For each car to be planned (line 1), we first assign an initial value to its (line 2). The value can be calculated by Equation (7) (lines 3 and 4). Then, based on the previously calculated , we get (line 6). According to Equation (9), we obtain the final calculation result (line 7), which is used to compare the route diversity between the current vehicle and all the planned vehicles. Then it is compared to the original calculated result (line 8). if the newly calculated value is smaller, we save the result (line 9) and index (line 10). Finally, we choose the vehicle with the smallest as our next vehicle to be evacuated (lines 9–12).
| Algorithm 2: GNP |
 |
Algorithm 3 is used to calculate the overlap of the routes between vehicles. We first obtain the routes of the planned vehicles and the unplanned vehicles (line 1 and 2). Then we get the minimum number of roads in the paths of the two vehicles (line 3). Next, we calculate the between the vehicles based on Equation (6) (line 5–8). Finally, we return the results of the calculation (line 9).
For specific vehicles in the evacuation process, we will use the navigation algorithm based on the VDWR road network model for route planning. At the beginning of the evacuation process, the vehicle will follow the current planned route. During the drive, the navigation system will automatically detect traffic on the roads within the threshold . When congestion is detected on the route, the algorithm will take the current position of the vehicle as the start and reconstruct the road network model considering current traffic data. When an alternative route is found using the current road network model, the navigation system will guide the vehicle to take this route to avoid congestion.
| Algorithm 3: computerUpdateRc |
 |
5. The Experimental Evaluations
In this section, we first introduce experimental settings and datasets. Then, we evaluate the effectiveness of our model and approach.
The experiments were conducted based on the road network data in Beijing. Due to the limitations of computer performance, we only matched the road network within the 3rd Ring Road of Beijing as the basis for the experiment, which contains 18,649 intersections and 24,360 roads. We store the intersections and roads in an array based on their position index, which allows us to obtain the status of each intersection and road in only time. Our computer’s processor is an Intel(R) Core(TM) i5-6500 CPU @ 3.20 GHz 3.20 GHz with 8.00 GB of RAM. Graphics card type is AMD Radeon(TM) HD8490.
5.1. Effectiveness of Model
In this section, we use the algorithm for route planning based on the model. Then we visualize the routes using the Gaode Map API to verify the benefits. We do not compare our algorithm with that of commercial navigation maps such as Google Maps, Baidu Maps, and AMAP since travel routes are closely related to traffic data, we cannot replicate the live traffic model.
In order to verify the effectiveness of the model, we visualize the route when the distance between the start and end is at different scales. We set and and the results are shown below.
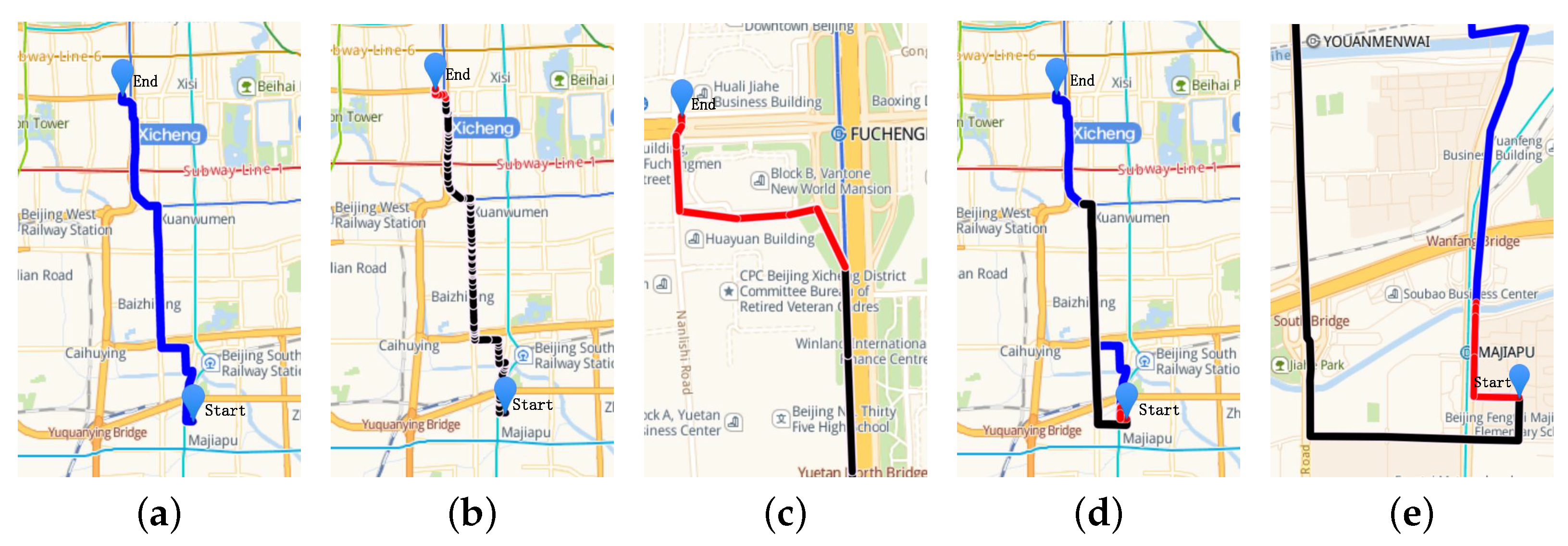
Firstly, two positions that are far apart were chosen as the start and end of the vehicle. The result is shown in Figure 6. The blue line is the optimal route when the traffic is free, followed by the red line for crowded roads and the black line for the optimal route under jammed conditions. Next, we set roads near the end to be crowded, as shown in the red line in Figure 6b. For the sake of observation, we zoom in on the crowded part, which is shown in the Figure 6c. As can be seen, the black line completely covers the original blue line, which means that the route did not change after the jam occurred. In turn, we set the status of the roads near the start to crowded. The results are shown in Figure 6d and the details are presented in Figure 6e. It could be found that the black route, which is a novel optimal route designed by the algorithm based on the VDWR model, avoids the congested red road.
Then, two closer locations are chosen as the start and end for a vehicle. The experimental results are depicted in Figure 7. At this time, we make the roads near the end crowded. Figure 7b gives an overall overview, and the detailed information is shown in Figure 7c. The figure shows that the algorithm avoids crowded roads when the distance between the start and the end is short (the distance between them is close to the threshold ).
From a travel perspective, when the distance between the start and end is short, the travel time is usually less and there is less chance for significant changes in traffic data during that period. In such cases, the algorithm should consider the entire road network and avoid congested roads, even if they are close to the end.
According to the above experiment, we can see that the proposed model enables navigation algorithms to obtain suitable routes based on live traffic. Next, we will evaluate the search efficiency of the algorithm in terms of the model.
5.2. Efficiency of Model
To analyze the efficiency of the navigation algorithm under the model, we conducted an analysis focusing on the algorithm’s performance with respect to various metrics. Specifically, we analyzed the path length, the number of expanded nodes during planning, the time required for route planning, and the length of the optimal route.
Under initial conditions where all roads in the network are free, we used the algorithm to obtain the optimal route for vehicles. We then modified the status of different roads in the optimal route to “crowded”, based on their distance from the start. This allowed us to observe the algorithm’s performance under different traffic conditions. Specifically, we obtained routes for three scenarios: (1) smooth traffic, (2) traffic conditions under the VDWR-based model, and (3) Based on weighted road network (The road weight are calculated without considering the distance between congested roads and vehicles).
We first set the , and choose a start and an end , where the distance between them is relatively short. Next, we simulate a scenario where the roads near the start of the route are congested while the rest of the road network is free. The results of this simulation are presented in Table 2.
From the table, it can be observed that when traffic is free, the number of nodes to be searched is the smallest, and the distance is the shortest. However, when road conditions are considered, the weight of congested roads increases, resulting in an increased number of nodes to be expanded. As a result, the final route obtained is longer than the optimal route.
Further, these roads, which are close to ends, are set to be congested. The experimental results are shown in Table 3.
When the distance between the start and the end is relatively short, the routes obtained through the model are guaranteed to be optimal under congestion avoidance, as confirmed by our experiments. This is because the short distance is also close to the threshold value of that we set, which is 3 km, and the total length of the route is also approximately 3 km. In such cases, the possibility of significant changes in live traffic is low, and the algorithm should consider the real-time status of roads to select the most optimal route. Our proposed model effectively meets this need, allowing navigation algorithms to obtain the most suitable routes based on live traffic data.
Next, we selected a pair of distant points as the vehicle’s start and end, with the start and the end 10,000. We conducted the same experiment again and found that when the congested roads were located near the start, the results were basically the same as when the distance between the start and end points was short. Therefore, we focused on analyzing the situation when the congested roads were located near the end. The results of this experiment are shown in Table 4.
From the above table, it is evident that the number of nodes and the distance of the route obtained based on the model are the same as those obtained under free traffic conditions. This implies that the algorithm fails to avoid congested roads. Moreover, the time and space required by the algorithm are also less than that required by the weighted road network. However, from the perspective of daily travel, it is not practical to consider road conditions that are 10,000 m away from the vehicle’s starting point.
Based on the previous discussion, it is clear that the route planning method utilizing the model achieves the global optimum when the distance between the start and end points is relatively short. This approach ensures a smooth driving process for the vehicle throughout the route. However, for longer distances, the algorithm based on the model considers only the road status within the threshold , disregarding traffic conditions beyond it. By doing so, the efficiency of path planning is improved.
5.3. Evaluation of Multi-Vehicle Dynamic Evacuation Efficiency Based on Route Diversity
In this section, we will evaluate the performance of the vehicle evacuation algorithm based on route diversity. To highlight its advantages, we will compare it with the evacuation algorithm based on spatial diversity [14].
The purpose of this experiment is to evaluate the efficiency of the evacuation algorithm. The metric used for this evaluation is the time elapsed between planning the first vehicle and the last vehicle. Prior to evacuating a vehicle, we obtain the traffic status of the first road in its route. The vehicle will not be evacuated until the road is clear.
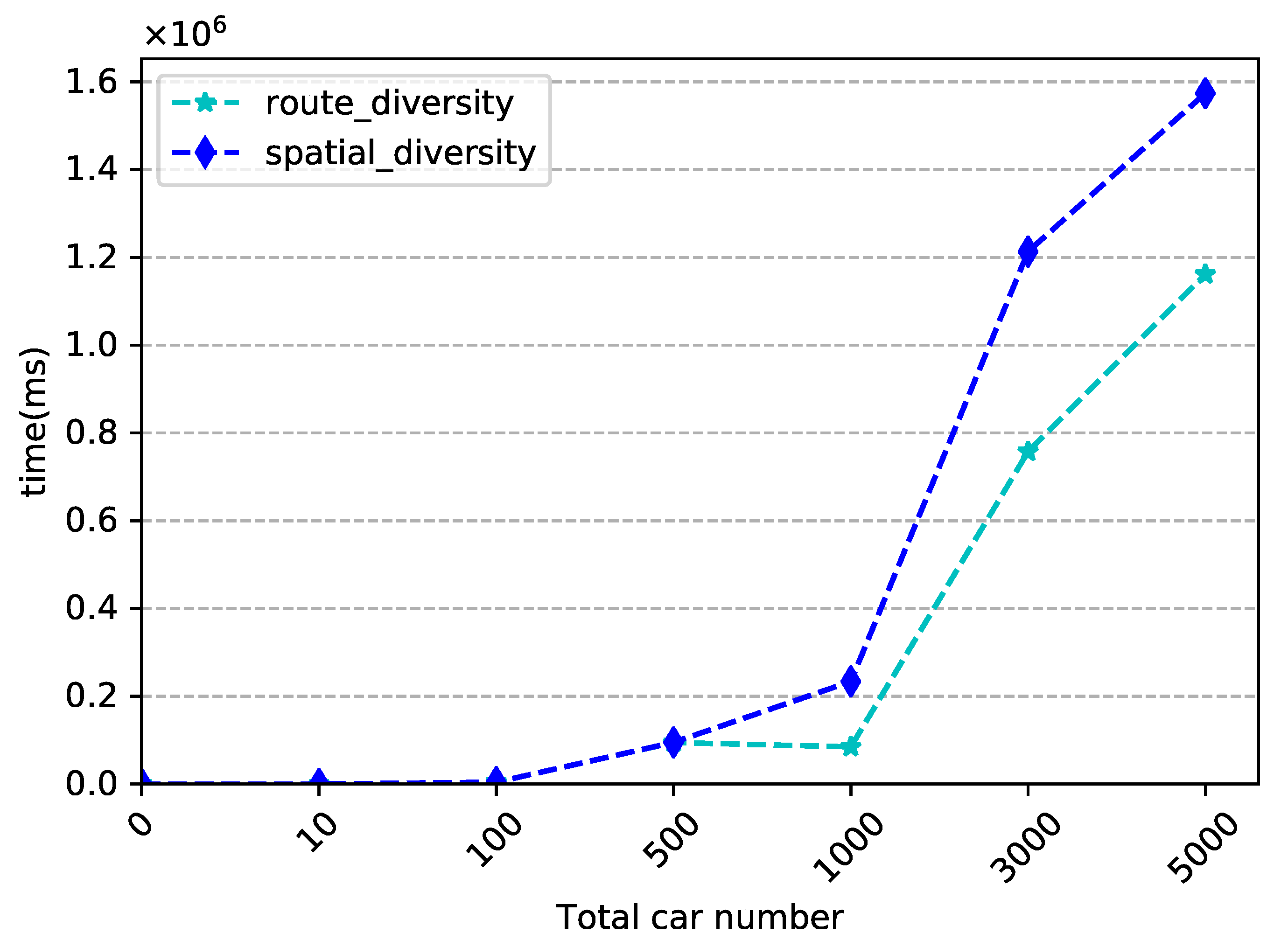
We selected evacuation center and randomly generated destinations for the vehicles, in order to observe the evacuation effect of the algorithm at different scales, including 10, 100, 500, 1000, 3000, and 5000 vehicles. To evaluate the evacuation effect of the algorithm, we compared the results with the evacuation algorithm based on spatial diversity [14]. To ensure the accuracy of the results, the destination of the vehicle is kept the same when comparing different algorithms at the same scale. The experimental results are shown in Figure 8.
The data presented in Figure 8 clearly show that the evacuation time increases as the number of vehicles to be evacuated increases. When only 10 vehicles are involved, there is little difference in the evacuation time between the two algorithms. However, as the number of vehicles increases, the difference becomes more significant. When evacuating 1000 vehicles, the time required by our new algorithm is less than half of that required by the original algorithm proposed by Cai et al. [14]. This difference continues to increase as the number of vehicles to be evacuated increases. These results indicate that our algorithm outperforms the previously proposed algorithm [14] in terms of evacuation time.
5.4. Evacuation Simulation Case Study
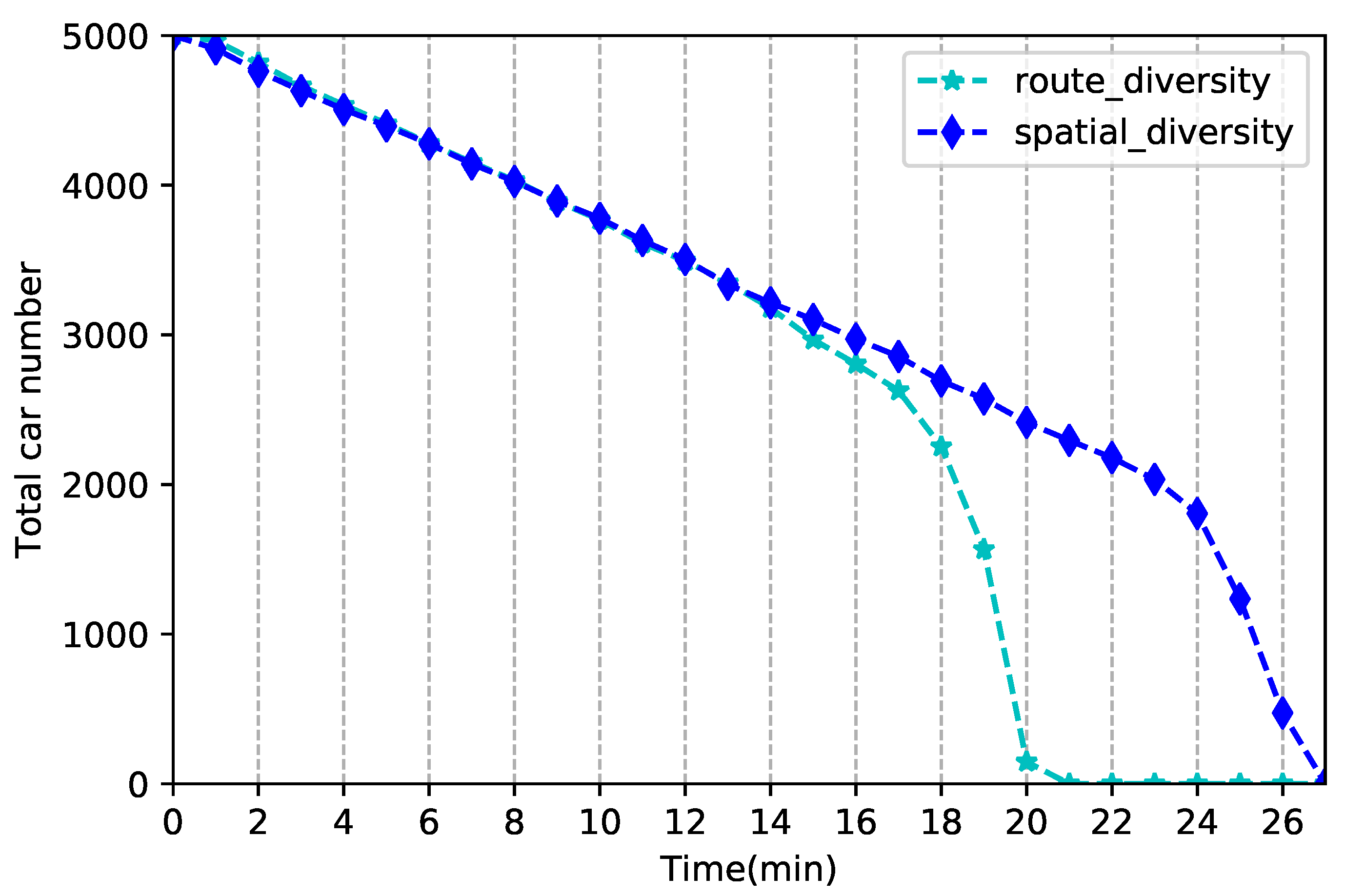
To visually demonstrate the superiority of our newly proposed multi-vehicle evacuation algorithm based on route diversity, we take the time of evacuating the first vehicle as the start and record the number of vehicles remaining at the evacuation center every 1 min. The results are then compared with those obtained using spatial diversity-based algorithms [14]. The number of vehicles involved in the experiment is 5000, and the results are presented in Figure 9.
The horizontal axis in the Figure 9 shows the time interval between the current time and the start time of evacuation in minutes, while the vertical axis shows the number of vehicles remaining at the evacuation center. The curves represent the trend of the number of vehicles remaining at the evacuation center over time using the evacuation algorithm based on spatial diversity [14] and the route diversity, respectively. The slope of the curves reflects the efficiency of vehicle evacuation. By comparing the curves, it can be observed that the efficiency of evacuation is roughly the same for both algorithms at the beginning of the evacuation. However, as the number of vehicles to be evacuated decreases, the algorithm based on route diversity reaches the inflection point of evacuation more quickly. Thereafter, it maintains higher evacuation efficiency than evacuation algorithm based on spatial diversity. Moreover, the newly proposed algorithm completes the evacuation 6 min earlier than the spatial diversity based algorithm [14]. In conclusion, our newly proposed algorithm has better evacuation performance.
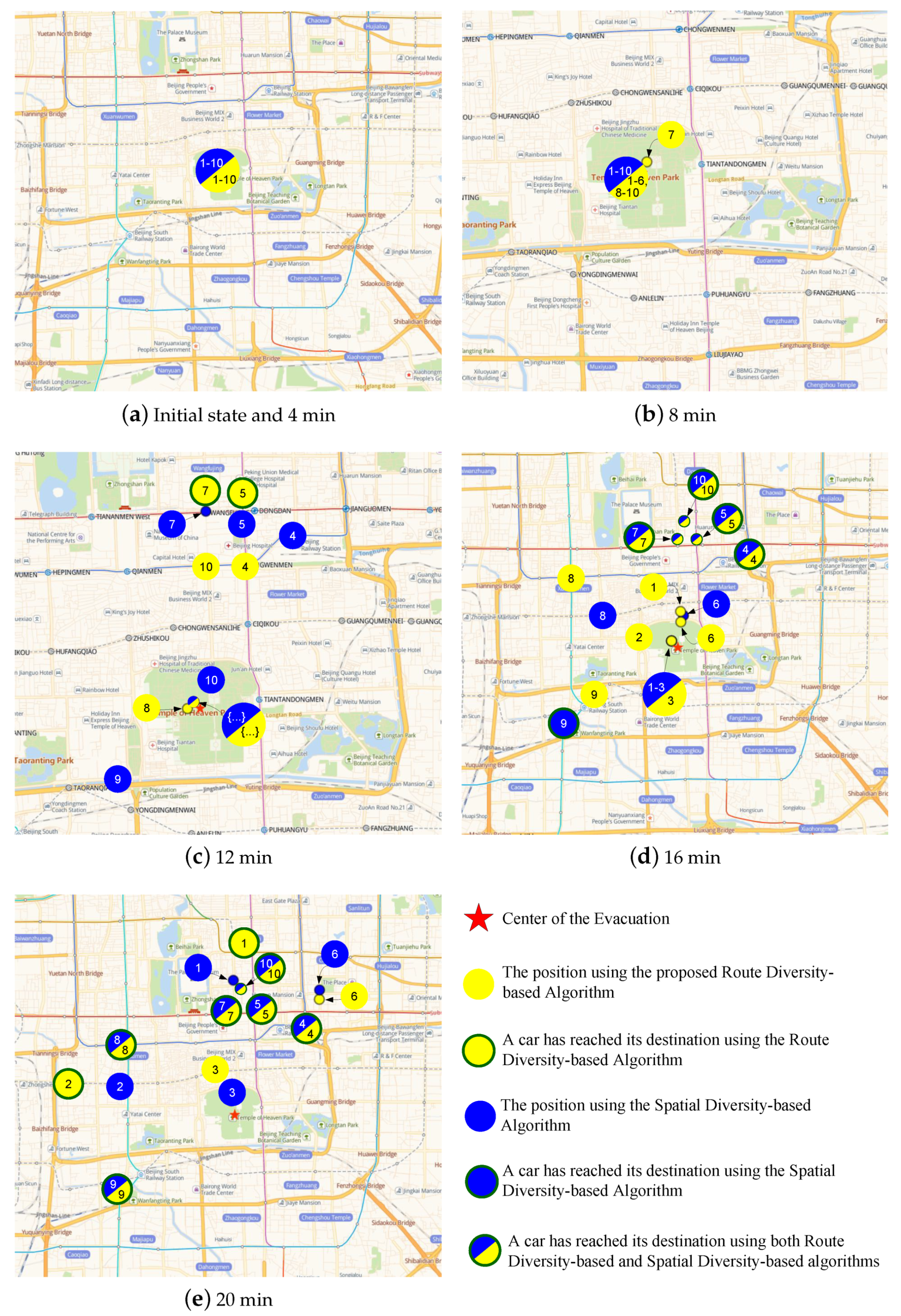
Based on the above experiments, we randomly selected 10 cars and observed their positions every 4 min from the evacuation start time. Again, we compared with the evacuation algorithm based on spatial diversity [14]. Since we did not have the specific latitude and longitude information of the vehicles, we used the location of the intersection at the exit of the road where the vehicle was located instead. The results are shown in Figure 10.
In Figure 10, the yellow and blue circles represent the real-time position of the vehicles based on the route diversity algorithm and the spatial diversity algorithm [14], respectively. The digits in the circles indicate the number of the vehicle. A green ring around a vehicle indicates that it has reached its destination. The pentagram represents the evacuation center.
In the 4 min of the evacuation, none of the selected vehicles had started evacuating, as shown in Figure 10a. At 8 min into the evacuation, as shown in Figure 10b, vehicle 7 has already departed using the route diversity algorithm, while none of the vehicles have started evacuating yet using the spatial diversity algorithm. At the 12 min, as shown in Figure 10c, two of the 10 selected vehicles have already reached the end using the route diversity algorithm, but none of them have reached their destination using the spatial diversity algorithm. The evacuation order between the two algorithms is also different. For example, in the route diversity algorithm, car 8 has priority over car 9, while the order is different in the spatial diversity algorithm.At the 16th minute of the evacuation, illustrated in Figure 10d, the route diversity algorithm has successfully evacuated 9 out of the 10 selected vehicles, and 4 of them have reached the end. In contrast, using the spatial diversity algorithm, 5 vehicles have reached their destination, and only 2 of them are still moving. Finally, in Figure 10e, the positions of the vehicles after 20 min from the start of the evacuation are shown. The route diversity algorithm has enabled 8 out of the 10 selected vehicles to reach the end, whereas only 6 vehicles have reached the end using the spatial diversity algorithm. As a result, the newly proposed evacuation algorithm demonstrates superior performance compared to the spatial diversity-based evacuation algorithm.
6. Conclusions and Further Work
In this paper, we have developed a vehicle-oriented dynamic weighted road network model (VDWR) for route planning. In the model, the weight of roads is dynamically updated based on their traffic states and the positions of vehicles. Our experimental results indicate that the model performs well together with algorithms for both short and long distance travel. We have also proposed a route diversity theory to address the problem of multi-vehicle evacuation. According to the theory, our algorithm can reduce route overlaps and thus provide a balanced road load. Additionally, the results of the experiments indicate that our proposed algorithm is 6 min faster than the evacuation algorithm based on spatial diversity when evacuating 5000 vehicles.
In the model, the scaling factor k is used to adjust the route length when road congestion occurs, and the threshold determines whether the congestion is taken into account. However, these values may depending on the time and road conditions. In future work, we plan to incorporate historical vehicle trajectory data and advanced data mining and deep learning techniques to determine parameter values that are more closely aligned with real-world conditions.
Author Contributions
Conceptualization and methodology, Zhi Cai and Tao Wang; experiment and evaluation, Tao Wang and Qing Mi; writing—original draft and validation, Tao Wang and Qing Mi; supervision, Xing Su; writing—review and editing, Xing Su, Limin Guo and Zhiming Ding. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the National Natural Science of Foundation of China under Grant 62072016, 62276011 and the Beijing Natural Science Foundation under Grant 4212016.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data presented in this study are available on request from the corresponding author.
Acknowledgments
The authors would like to thank the anonymous reviewers and the members of the editorial team for their comments and contributions. Thanks for the partial support of the National Natural Science of Foundation of China under Grant 62072016, 62276011 and the Beijing Natural Science Foundation under Grant 4212016.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Yang, Z.; Jia, P.; Liu, W.; Yin, H. Car ownership and urban development in Chinese cities: A panel data analysis. J. Transp. Geogr. 2017, 58, 127–134. [Google Scholar] [CrossRef]
- Shlyakhtin, A.E.; Nugaev, F.S.; Mustafin, A.N. Traffic jam influence on the economic losses to society as exemplified by the city of Kazan. J. Econ. Econ. Educ. Res. 2016, 17, 157–162. [Google Scholar]
- Figueiredo, L.; Jesus, I.; Machado, J.; Ferreira, J.; Martins de Carvalho, J. Towards the development of intelligent transportation systems. In Proceedings of the ITSC 2001, 2001 IEEE Intelligent Transportation Systems. Proceedings (Cat. No.01TH8585), Oakland, CA, USA, 25–29 August 2001; pp. 1206–1211. [Google Scholar] [CrossRef]
- Rao, A.; Phadnis, A.; Patil, A.; Rajput, T.; Futane, P. Dynamic Traffic System Based on Real Time Detection of Traffic Congestion. In Proceedings of the 2018 Fourth International Conference on Computing Communication Control and Automation (ICCUBEA), Pune, India, 16–18 August 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Lam, C.T.; Gao, H.; Ng, B. A real-time traffic congestion detection system using on-line images. In Proceedings of the 2017 IEEE 17th International Conference on Communication Technology (ICCT), Chengdu, China, 27–30 October 2017; pp. 1548–1552. [Google Scholar] [CrossRef]
- Xun, F.-F.; Yang, X.-H.; Xie, Y.; Wang, L.-Y. Congestion Detection of Urban Intersections Based on Surveillance Video. In Proceedings of the 2018 18th International Symposium on Communications and Information Technologies (ISCIT), Bangkok, Thailand, 26–29 September 2018; pp. 495–498. [Google Scholar] [CrossRef]
- Guo, C.; Li, D.; Zhang, G.; Zhai, M. Real-Time Path Planning in Urban Area via VANET-Assisted Traffic Information Sharing. IEEE Trans. Veh. Technol. 2018, 67, 5635–5649. [Google Scholar] [CrossRef]
- Liu, Z.Q.; Chun-Gui, L.I.; Chen, B. Dynamic optimal path planning based on forecasts of traffic flow. J. Guangxi Univ. Technol. 2012, 23, 41–45. [Google Scholar]
- Wu, C.; Zhou, S.; Xiao, L. Dynamic Path Planning Based on Improved Ant Colony Algorithm in Traffic Congestion. IEEE Access 2020, 8, 180773–180783. [Google Scholar] [CrossRef]
- Song, Z.; Duan, H.; Zhou, S.; Qiu, X. Urban route planning considering traffic flows. In Proceedings of the 2015 Chinese Automation Congress (CAC), Wuhan, China, 27–29 November 2015; pp. 1940–1944. [Google Scholar] [CrossRef]
- Xu, J.; Li, X. Study on Dynamic Capacity of Urban Road Network Considering the Impact of Cascade Failure. In Proceedings of the 2021 6th International Conference on Smart Grid and Electrical Automation (ICSGEA), Kunming, China, 29–30 May 2021; pp. 612–618. [Google Scholar] [CrossRef]
- Chen, Y.; Xiao, D. Dynamic traffic assignment-based method for real-time traffic management during emergency evacuation. J. Tsinghua Univ. Technol. 2009, 49, 1102–1105. [Google Scholar]
- Dai, L.L.; Gu, J.G.; Sun, Z.L.; Qiu, H.T. Study on traffic organization and management strategies for large special events. In Proceedings of the International Conference on System Science & Engineering, Dalian, China, 30 June–2 July 2012. [Google Scholar]
- Cai, Z.; Ren, F.; Chi, Y.; Jia, X.; Duan, L.; Ding, Z. Multi-vehicles dynamic navigating method for large-scale event crowd evacuations. GeoInformatica 2018, 22, 435–462. [Google Scholar] [CrossRef]
- Mo, F.; Tabbara, A.; Brayton, R.K. A force-directed maze router. In Proceedings of the IEEE/ACM International Conference on Computer Aided Design, San Jose, CA, USA, 4–8 November 2001. [Google Scholar]
- Wang, C.; Pan, J.S.; Xu, H.R.; Jia, J.; Meng, Z.Y. An Improved A* Algorithm for Traffic Navigation in Real-Time Environment. In Proceedings of the 2015 Third International Conference on Robot, Vision and Signal Processing (RVSP), Kaohsiung, Taiwan, 18–20 November 2015; pp. 47–50. [Google Scholar] [CrossRef]
- Chen, T.; Zhang, G.; Hu, X.; Xiao, J. Unmanned aerial vehicle route planning method based on a star algorithm. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; pp. 1510–1514. [Google Scholar] [CrossRef]
- Bell, M.G. Hyperstar: A multi-path Astar algorithm for risk averse vehicle navigation. Transp. Res. Part B Methodol. 2009, 43, 97–107. [Google Scholar] [CrossRef]
- Nannicini, G.; Delling, D.; Liberti, L.; Schultes, D. Bidirectional A* search for time-dependent fast paths. In Proceedings of the International Workshop on Experimental and Efficient Algorithms; Springer: Berlin/Heidelberg, Germany, 2008; pp. 334–346. [Google Scholar]
- Liu, J.; Fang, Y.; Liu, Y. Ant colony system algorithm for path routing of urban traffic vehicles. In Proceedings of the 2007 IEEE International Conference on Automation and Logistics, Jinan, China, 18–21 August 2007; pp. 1902–1907. [Google Scholar]
- Ok, S.H.; Seo, W.J.; Ahn, J.H.; Kang, S.; Moon, B. An ant colony optimization approach for the preference-based shortest path search. J. Chin. Inst. Eng. 2011, 34, 181–196. [Google Scholar] [CrossRef]
- Luo, C.; Yang, S.X. A Bioinspired Neural Network for Real-Time Concurrent Map Building and Complete Coverage Robot Navigation in Unknown Environments. IEEE Trans. Neural Netw. 2008, 19, 1279–1298. [Google Scholar] [CrossRef]
- Luo, C.; Yang, S.X.; Krishnan, M.; Paulik, M. An effective vector-driven biologically-motivated neural network algorithm to real-time autonomous robot navigation. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 4094–4099. [Google Scholar] [CrossRef]
- Li, S.; Yang, A.; Chen, L. Path Planning Algorithm on Large Scale Terrain Data Based on PRM with Non-Uniform Sampling Strategy. In Proceedings of the 2021 IEEE 2nd International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), Chongqing, China, 17–19 December 2021; Volume 2, pp. 203–207. [Google Scholar] [CrossRef]
- Song, R.; Liu, Y.; Bucknall, R. Smoothed A* algorithm for practical unmanned surface vehicle path planning. Appl. Ocean Res. 2019, 83, 9–20. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, F.; Li, Z. A multi-UAV cooperative route planning methodology for 3D fine-resolution building model reconstruction. ISPRS J. Photogramm. Remote Sens. 2018, 146, 483–494. [Google Scholar] [CrossRef]
- Jeong, M.G.; Lee, E.B.; Lee, M.; Jung, J.Y. Multi-criteria route planning with risk contour map for smart navigation. Ocean Eng. 2019, 172, 72–85. [Google Scholar] [CrossRef]
- Li, Z.; Kolmanovsky, I.V.; Atkins, E.M.; Lu, J.; Filev, D.P.; Bai, Y. Road Disturbance Estimation and Cloud-Aided Comfort-Based Route Planning. IEEE Trans. Cybern. 2017, 47, 3879–3891. [Google Scholar] [CrossRef] [PubMed]
- Rasekhipour, Y.; Khajepour, A.; Chen, S.K.; Litkouhi, B. A Potential Field-Based Model Predictive Path-Planning Controller for Autonomous Road Vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1255–1267. [Google Scholar] [CrossRef]
- Faizian, P.; Mollah, M.A.; Yuan, X.; Pakin, S.; Lang, M. Random Regular Graph and Generalized De Bruijn Graph with k-Shortest Path Routing. In Proceedings of the 2016 IEEE International Parallel and Distributed Processing Symposium (IPDPS), Chicago, IL, USA, 23–27 May 2016; pp. 103–112. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, S.; Shen, Z.J.M.; Wu, C. Robust Shortest Path Problem With Distributional Uncertainty. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1080–1090. [Google Scholar] [CrossRef]
- Guo, J.; Wu, Y.; Zhang, X.; Zhang, L.; Chen, W.; Cao, Z.; Zhang, L.; Guo, H. Finding the ‘faster’ path in vehicle routing. IET Intell. Transp. Syst. 2017, 11, 685–694. [Google Scholar] [CrossRef]
- Khosroshahi, A.H.; Keshavarzi, P.; KoozehKanani, Z.D.; Sobhi, J. Acquiring real time traffic information using VANET and dynamic route guidance. In Proceedings of the 2011 IEEE 2nd International Conference on Computing, Control and Industrial Engineering, Wuhan, China, 20–21 August 2011; Volume 1, pp. 9–13. [Google Scholar] [CrossRef]
- Huang, F.; Xu, J.; Weng, J. Multi-Task Travel Route Planning With a Flexible Deep Learning Framework. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3907–3918. [Google Scholar] [CrossRef]
- Cai, Z.; Cui, X.; Su, X.; Mi, Q.; Guo, L.; Ding, Z. A novel vector-based dynamic path planning method in urban road network. IEEE Access 2019, 8, 9046–9060. [Google Scholar] [CrossRef]
- Huang, B.; Zhang, F.; Lei, L. Dynamic Path Planning Based on Service Level of Road Network. Electronics 2022, 11, 3267. [Google Scholar] [CrossRef]
- Zhao, S.; Tian, Q.; Li, J.; Cao, Y. Efficiency-driven complex transit network model. In Proceedings of the 2011 International Conference on Transportation, Mechanical, and Electrical Engineering (TMEE), Changchun, China, 16–18 December 2011; pp. 8–11. [Google Scholar] [CrossRef]
- Lv, Y.; Zhang, X.; Kang, W.; Duan, Y. Managing Emergency Traffic Evacuation With a Partially Random Destination Allocation Strategy: A Computational-Experiment-Based Optimization Approach. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2182–2191. [Google Scholar] [CrossRef]
- Konstantinidou, M.A.; Kepaptsoglou, K.L.; Karlaftis, M.G.; Stathopoulos, A. Joint Evacuation and Emergency Traffic Management Model with Consideration of Emergency Response Needs. Transp. Res. Rec. 2015, 2532, 107–117. [Google Scholar] [CrossRef]
- Chen, Y.M.; Xiao, D.Y. Real-time traffic management under emergency evacuation based on dynamic traffic assignment. In Proceedings of the 2008 IEEE International Conference on Automation and Logistics, Qingdao, China, 1–3 September 2008; pp. 1376–1380. [Google Scholar] [CrossRef]
- Lin, J.; Li, N.; Rao, L.L.; Lovreglio, R. Individual wayfinding decisions under stress in indoor emergency situations: A theoretical framework and meta-analysis. Saf. Sci. 2023, 160, 106063. [Google Scholar] [CrossRef]
- Kinateder, M.; Comunale, B.; Warren, W.H. Exit choice in an emergency evacuation scenario is influenced by exit familiarity and neighbor behavior. Saf. Sci. 2018, 106, 170–175. [Google Scholar] [CrossRef]
- Wang, J.H.; Yan, W.Y.; Zhi, Y.R.; Jiang, J.C. Investigation of the Panic Psychology and Behaviors of Evacuation Crowds in Subway Emergencies. Procedia Eng. 2016, 135, 128–137. [Google Scholar] [CrossRef] [Green Version]
- Zhang, X. Study on rapid evacuation in high-rise buildings. Eng. Sci. Technol. Int. J. 2017, 20, 1203–1210. [Google Scholar] [CrossRef]
- Yazdani, M.; Mojtahedi, M.; Loosemore, M.; Sanderson, D.; Dixit, V. Hospital evacuation modelling: A critical literature review on current knowledge and research gaps. Int. J. Disaster Risk Reduct. 2021, 66, 102627. [Google Scholar] [CrossRef]
- Ding, N.; Chen, T.; Zhu, Y.; Lu, Y. State-of-the-art high-rise building emergency evacuation behavior. Phys. A Stat. Mech. Appl. 2021, 561, 125168. [Google Scholar] [CrossRef]
- Saini, K.; Kalra, S.; Sood, S.K. Disaster Emergency Response Framework for Smart Buildings. Future Gener. Comput. Syst. 2022, 131, 106–120. [Google Scholar] [CrossRef]
- Wu, Q.; Du, Y.; Xu, H.; Zhao, Y.; Zhang, X.; Yao, Y. Finding the earliest arrival path through a time-varying network for evacuation planning of mine water inrush. Saf. Sci. 2020, 130, 104836. [Google Scholar] [CrossRef]
- Xu, J.; Zhao, M.; Lin, Y. Simulation-Based Evacuation System for Large-Scale Urban Road Network Considering Traffic Conditions. Transp. Res. Rec. 2022, 2676, 528–539. [Google Scholar]
- Liu, M.; Zhang, F.; Ma, Y.; Pota, H.R.; Shen, W. Evacuation path optimization based on quantum ant colony algorithm. Adv. Eng. Inform. 2016, 30, 259–267. [Google Scholar] [CrossRef]
- Zong, X.; Jiang, Y. Pedestrian-vehicle mixed evacuation model based on multi-particle swarm optimization. In Proceedings of the 2016 11th International Conference on Computer Science & Education (ICCSE), Nagoya, Japan, 23–25 August 2016; pp. 568–572. [Google Scholar]
- Zheng, H.; Chiu, Y.C.; Mirchandani, P.B.; Hickman, M. Modeling of evacuation and background traffic for optimal zone-based vehicle evacuation strategy. Transp. Res. Rec. 2010, 2196, 65–74. [Google Scholar] [CrossRef] [Green Version]
- Votion, J.; Cao, Y. Diversity-Based Cooperative Multivehicle Path Planning for Risk Management in Costmap Environments. IEEE Trans. Ind. Electron. 2019, 66, 6117–6127. [Google Scholar] [CrossRef]
- Ahmed, F.; Deb, K. Multi-objective optimal path planning using elitist non-dominated sorting genetic algorithms. Soft Comput. 2013, 17, 1283–1299. [Google Scholar] [CrossRef]
Figure 1.
Demonstration of vehicle evacuation sequence based on spatial diversity (p is the location of end for the corresponding vehicle with the number in the circle shows its evacuation order).
Figure 1.
Demonstration of vehicle evacuation sequence based on spatial diversity (p is the location of end for the corresponding vehicle with the number in the circle shows its evacuation order).

Figure 2.
function graph ().

Figure 3.
Example of state transformation of the road networks when road jam occurs.

Figure 4.
Example of route updating when traffic jam occurs. (When the road is congested).

Figure 5.
Demonstration of vehicle evacuation sequence based on route diversity (In case of Figure 1, the numbers in the blue and yellow semicircles indicate the evacuation order in the spatial diversity-based and route diversity-based algorithms respectively).
Figure 5.
Demonstration of vehicle evacuation sequence based on route diversity (In case of Figure 1, the numbers in the blue and yellow semicircles indicate the evacuation order in the spatial diversity-based and route diversity-based algorithms respectively).

Figure 6.
Example of long distance between start and end. (a) The route when traffic is free. (b) The jam is close to the end. (c) Detail of jam near the end in (b). (d) The jam is close to the start. (e) Detail of jam near the start point in (d).
Figure 6.
Example of long distance between start and end. (a) The route when traffic is free. (b) The jam is close to the end. (c) Detail of jam near the end in (b). (d) The jam is close to the start. (e) Detail of jam near the start point in (d).

Figure 7.
Example of close distance between start and end. (a) Route when the traffic is smooth; (b) The Congestion close to the end; (c) Detail of congestion near the end point in (b).
Figure 7.
Example of close distance between start and end. (a) Route when the traffic is smooth; (b) The Congestion close to the end; (c) Detail of congestion near the end point in (b).

Figure 8.
Comparison of accuracy of different methods.

Figure 9.
The number of vehicles remaining in the evacuation center over time.

Figure 10.
Simulation locations of the random selected (from 5000) vehicles to be evacuated at different times.
Figure 10.
Simulation locations of the random selected (from 5000) vehicles to be evacuated at different times.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Planning Step in Figure 5 ( and ).
Table 1.
Planning Step in Figure 5 ( and ).
| Step | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| 1 | |||||||||
| 2 | |||||||||
| 3 | |||||||||
| 4 | |||||||||
| 5 | |||||||||
| 6 | |||||||||
| 7 | |||||||||
| 8 | |||||||||
| 9 |
Table 2.
Crowded Road is Located Near the Origin While Driving a Relatively Short Distance.
| Conditions | Number of Path Nodes | Number of Extended Nodes | Search Time | Route Length |
|---|---|---|---|---|
| Traffic is smooth | 35 | 403 | 9 ms | 3170.0 m |
| Based on | 28 | 418 | 10 ms | 3255.0 m |
| Based on weighted road networks | 28 | 418 | 9 ms | 3255.0 m |
Table 3.
Crowded Road is Located Near the Destination While Driving a Relatively Short Distance.
| Conditions | Number of Path Nodes | Number of Extended Nodes | Search Time | Route Length |
|---|---|---|---|---|
| Traffic is smooth | 35 | 403 | 9 ms | 3170.0 m |
| Based on | 32 | 405 | 9 ms | 3191.0 m |
| Based on weighted road networks | 32 | 405 | 9 ms | 3191.0 m |
Table 4.
Crowded Road is Located Near the Destination While Driving a Relatively Long Distance.
| Conditions | Number of Path Nodes | Number of Extended Nodes | Search Time | Route Length |
|---|---|---|---|---|
| Traffic is smooth | 118 | 9622 | 157 ms | 11,172.0 m |
| Based on | 118 | 9623 | 159 ms | 11,172.0 m |
| Based on weighted road networks | 120 | 9675 | 180 ms | 11,200.0 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Cai, Z.; Wang, T.; Mi, Q.; Su, X.; Guo, L.; Ding, Z. Dynamic Weighted Road Network Based Multi-Vehicles Navigation and Evacuation. ISPRS Int. J. Geo-Inf. 2023, 12, 127. https://doi.org/10.3390/ijgi12030127
AMA Style
Cai Z, Wang T, Mi Q, Su X, Guo L, Ding Z. Dynamic Weighted Road Network Based Multi-Vehicles Navigation and Evacuation. ISPRS International Journal of Geo-Information. 2023; 12(3):127. https://doi.org/10.3390/ijgi12030127
Chicago/Turabian StyleCai, Zhi, Tao Wang, Qing Mi, Xing Su, Limin Guo, and Zhiming Ding. 2023. "Dynamic Weighted Road Network Based Multi-Vehicles Navigation and Evacuation" ISPRS International Journal of Geo-Information 12, no. 3: 127. https://doi.org/10.3390/ijgi12030127
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.