
Literature Review on Recent Trends and Perspectives of Collaborative Robotics in Work 4.0
 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Background
- Technological changes through increasing digitization, which are triggered by globally available fast and mobile internet, including the latest 5G technology, as well as,
- Organizational changes due to new developments of robotics and artificial intelligence in production, and thus, in the workplace.
2.1. Work 4.0
- The consistent networking of people, machines, processes, data, and objects in the Internet of Production,
- An exponential increase in the storage and analysis capabilities of information and communication technologies,
- New possibilities in robotics and sensor technologies, and the fusion of sensor data,
- Additive manufacturing processes,
2.2. Key Aspects of Human–Robot Collaboration
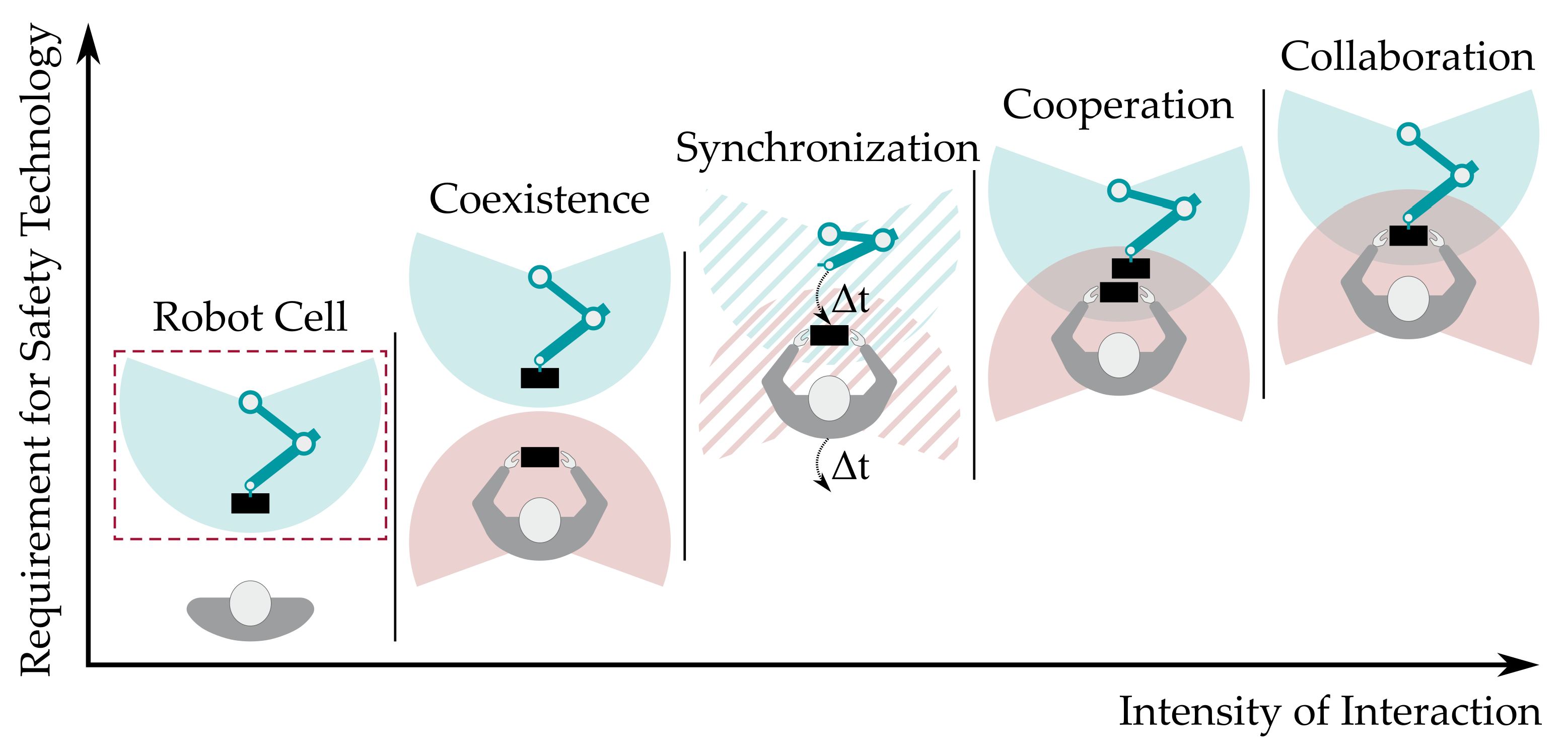
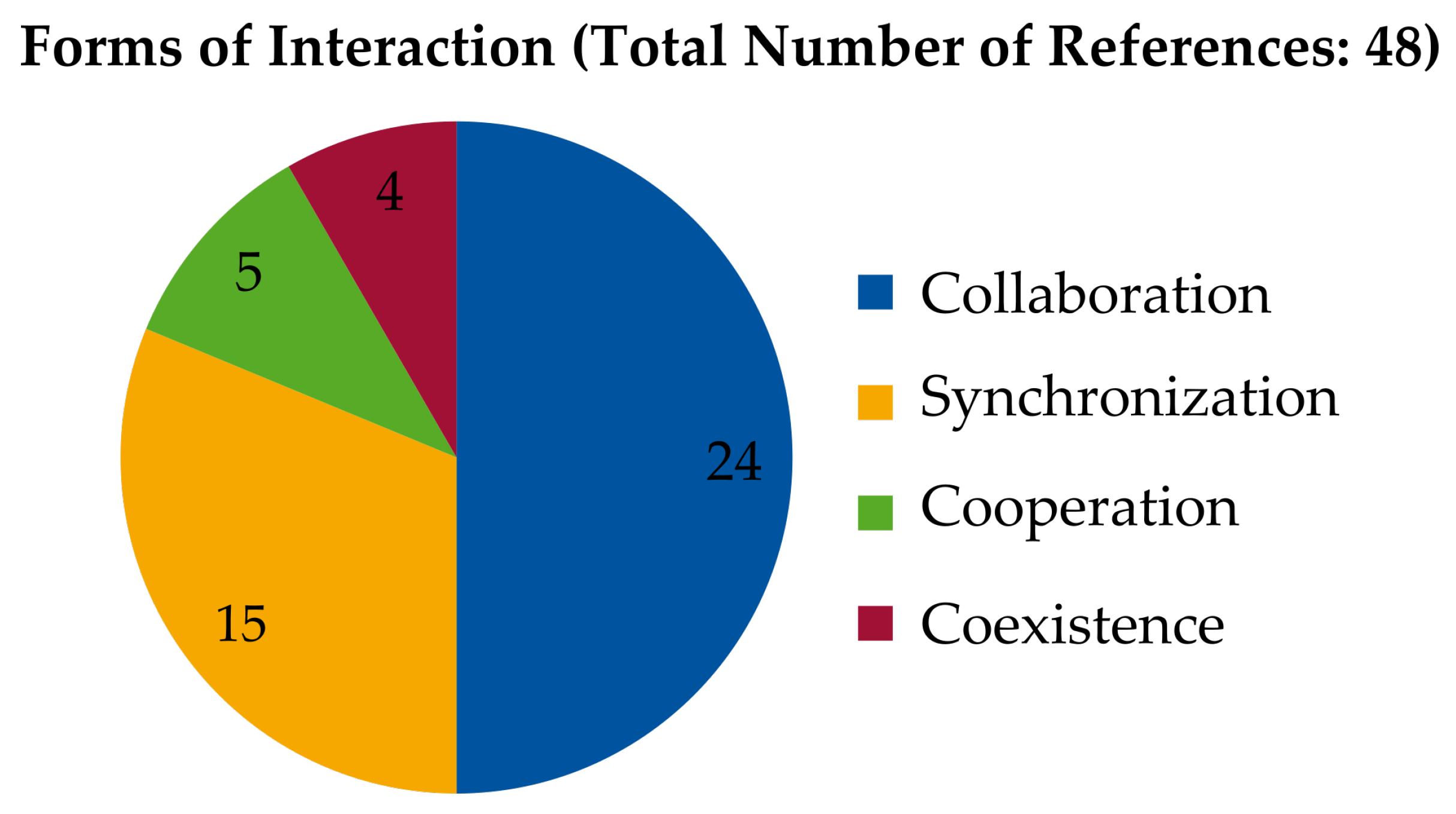
- Coexistence, also called Coaction, is defined inconsistently in the literature. Behrens et al. [62] envision no sharing of the workspace between humans and robots, and no common task and contact, nor the coordination of actions and intentions. Aaltonen et al. [63] envision the possibility of agents sharing a workspace but only while working on different tasks.
- In synchronization, the work areas of humans and robots overlap, both actors work on the same task. However, the work in the overlapping area, the so-called collaboration space, takes place with a time delay (temporal separation). Physical contact is not intended but possible [64].
- Collaboration is defined as a joint execution of a complex work task with direct interaction between humans and robots [68]. In collaboration, humans and robots work simultaneously on the same workpiece. Controlled contact is intended. The characteristics of collaboration are:
- Non-contact collaboration, in which no physical interaction takes place. Within, the actions are coordinated through information exchange via direct communication (speech, gestures, etc.) [47,71,72] or indirect communication (recognition of intentions, gaze, facial expressions, etc.) [73,74]. Usually, the human performs tasks that require dexterity or decision-making competence, while the robot takes over tasks such as repetitive, precise, dangerous, or force requiring applications [2,75].

2.3. Organizational and Structural Components of Human–Robot Collaboration
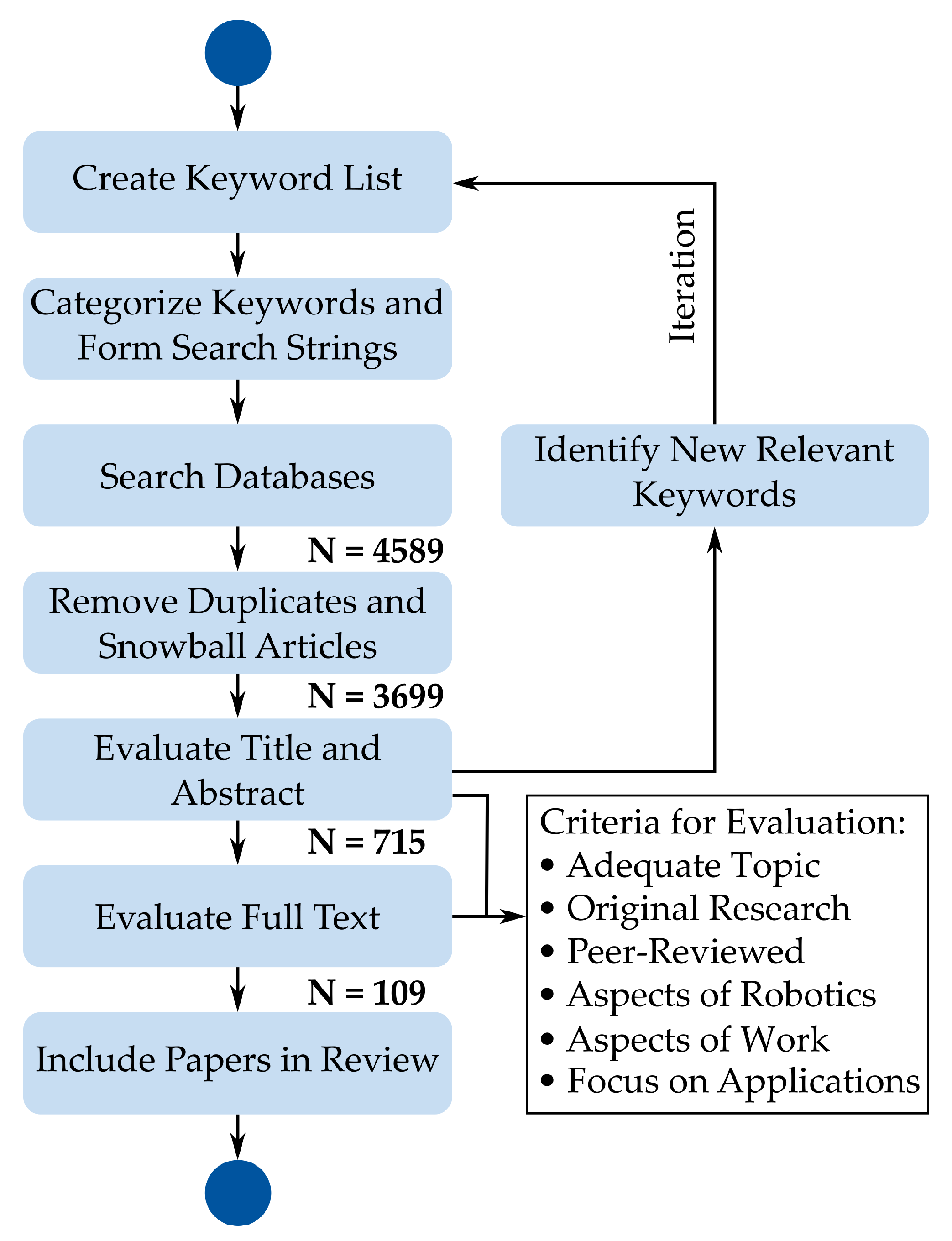
3. Methodology for a Search and Evaluation Strategy
4. Analysis Results
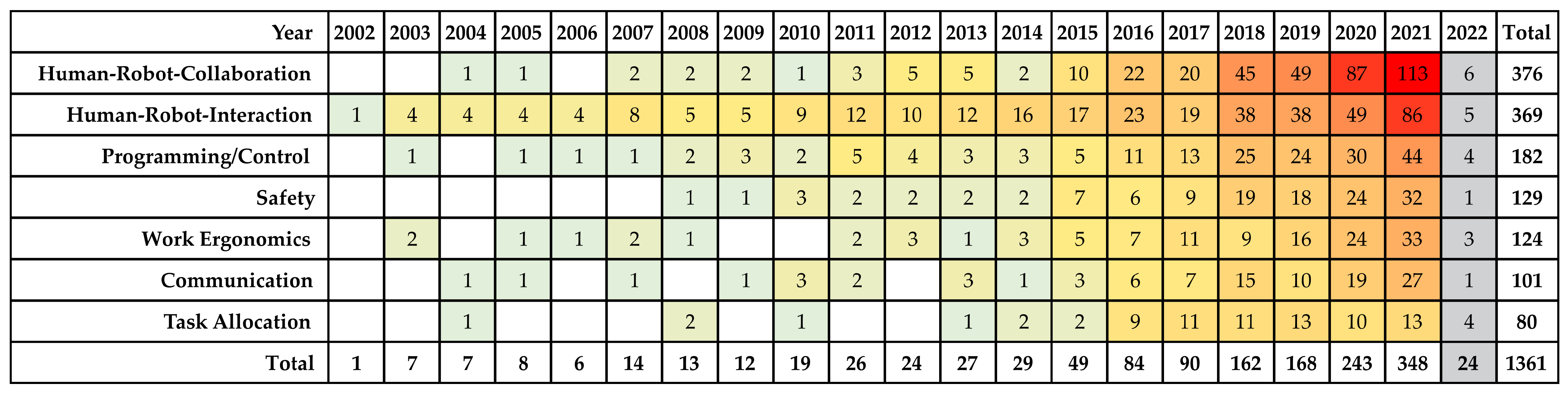
4.1. Heatmap
4.2. Forms of Interaction
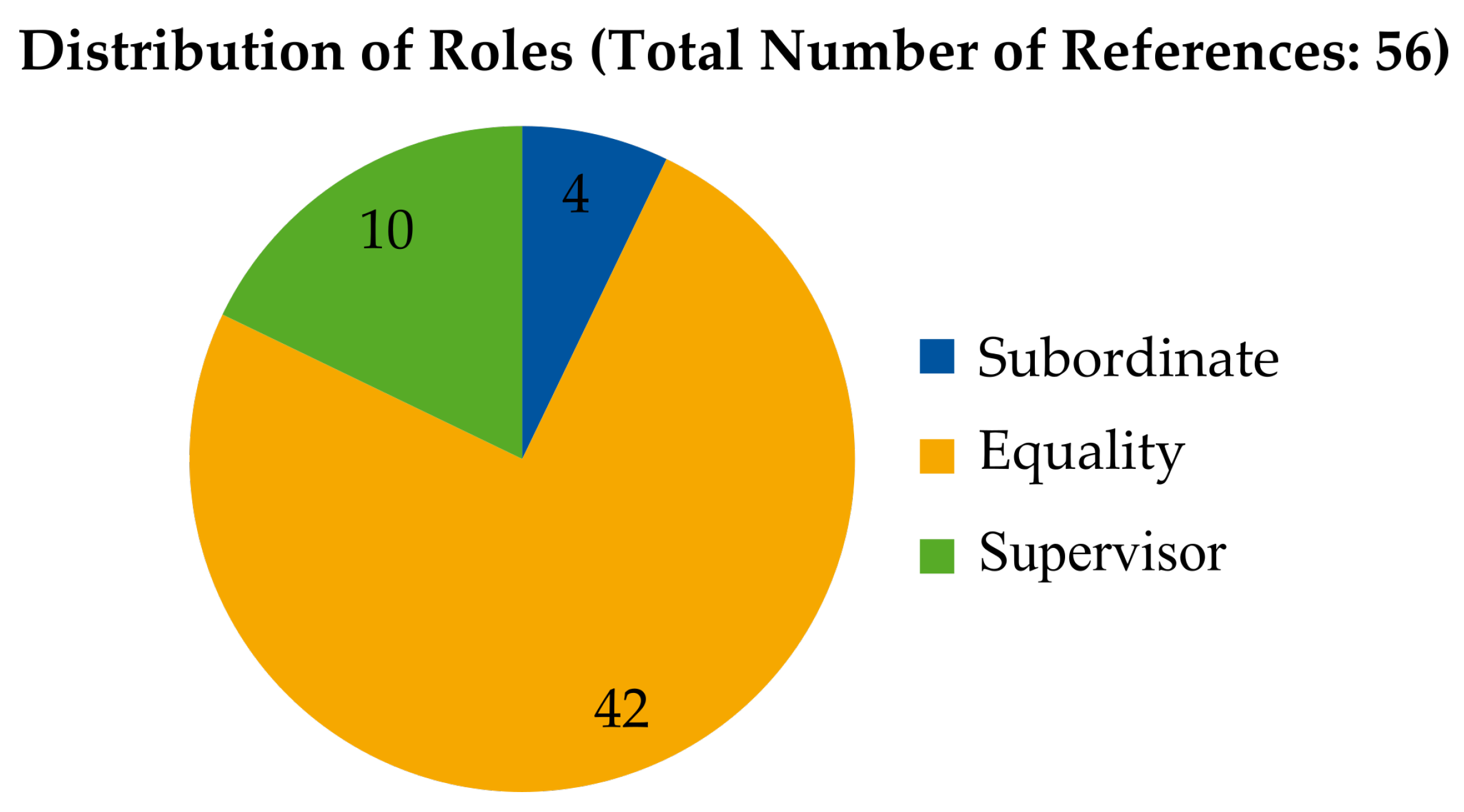
4.3. Distribution of Roles
- Supervisor: The worker takes the main responsibility and initiative in the interaction with the robot. The human determines the sequence and pace of the work process while performing the work tasks in the manufacturing process.
- Equality: In this form, there is a joint determination of the sequence and pace of the work process. This requires situation-adapted programming of the robot. Compared to the supervising form, this form has a higher demand on the conception of the work and task definition.
- Subordinate: In this form, the worker adapts the execution of their activity and the sequence of process steps, as well as his working speed, to the robot. This is comparable to manufacturing in a line production with fixed cycle times. The subordination in the relationship is based on the implementation of a full automation approach. Therefore, the human becomes a gap-filler in the production process. Their radius of action is characterized by governing events and not by a self-determined interaction with the system.
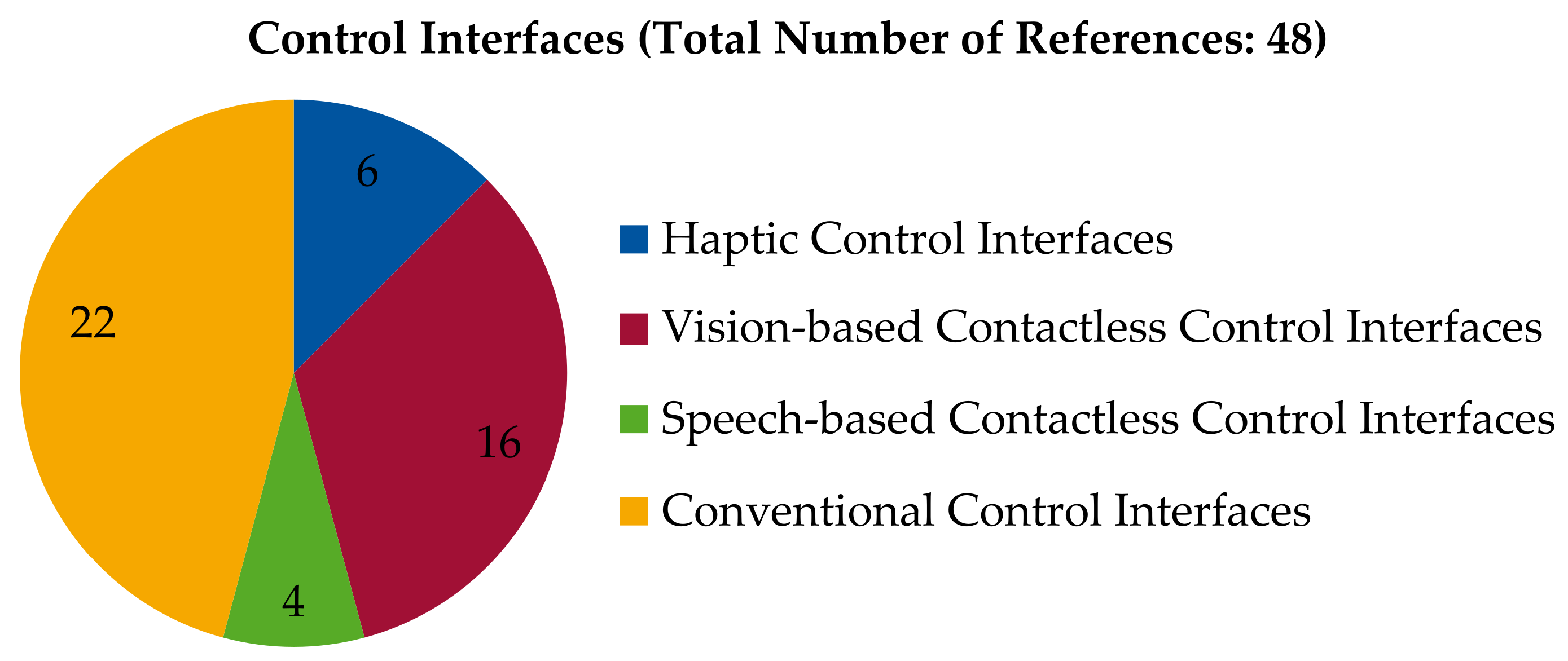
4.4. Control Interfaces
- Conventional control interfaces: Keyboard, mouse, monitor, and touchscreens;
- Contactless control interfaces:
- −
- Vision-based: Gestures, facial expressions, and gaze,
- −
- Language-based: Speech;
- Haptic control interfaces: Hand guiding.
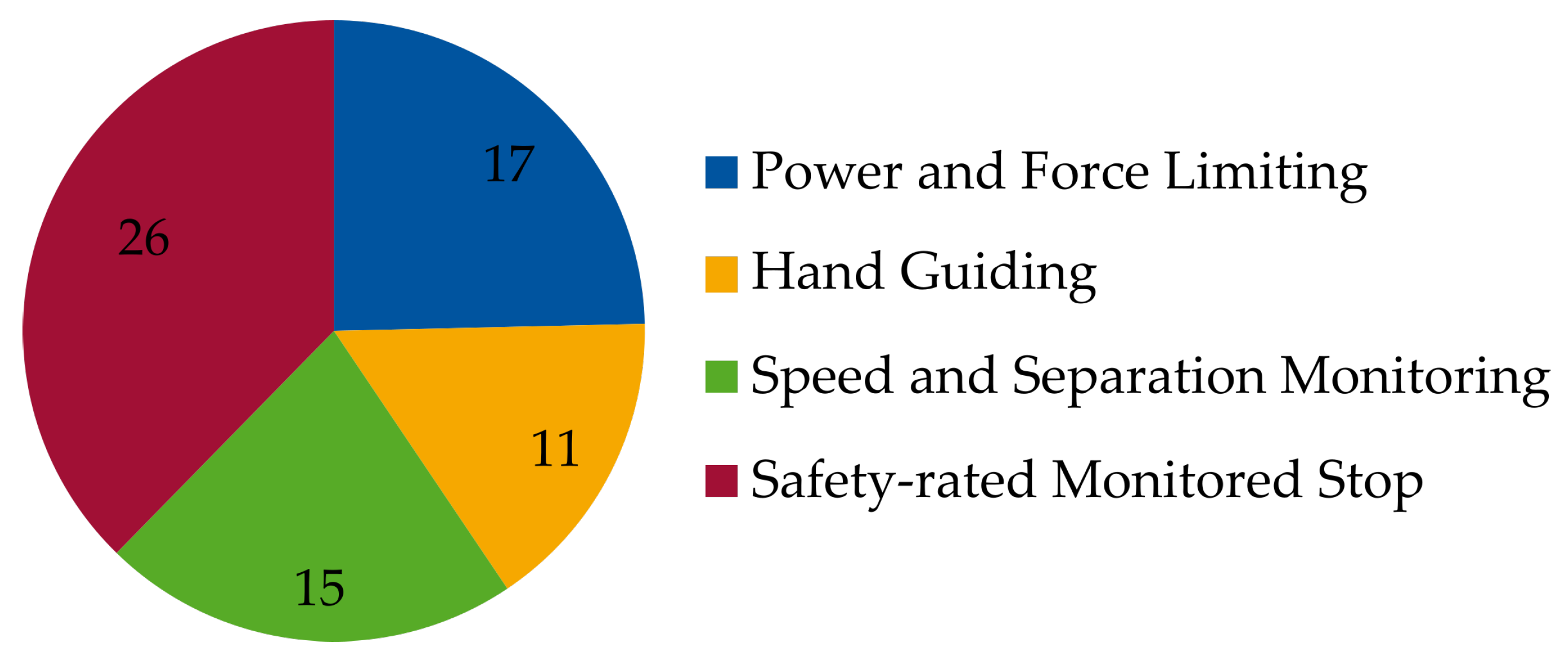
4.5. Safety Procedures
- In the safety-rated monitored stop, sensors monitor the workspace of the robot. The robot stops the movement when a human enters the workspace to interact with it (e.g., for loading or unloading). When no human is present in the workspace, the robot may move at maximum speed in non-collaborative mode.
- Speed and separation monitoring are used when humans and robots are collaborating. A safe distance must be maintained during the execution of the task. When this distance decreases below a safety-critical threshold, the robot must stop. The relative speed and distance between the human and the robot influences the variable speed and separation values. The protective separation distance depends on:
- −
- The human’s change in location,
- −
- The robot’s reaction time,
- −
- The robot’s stopping distance,
- −
- The sensor field’s intrusion distance,
- −
- The position uncertainty of the operator,
- −
- The position uncertainty of the robot.
- Hand guiding is usually performed with the help of manually actuated devices near the end effector to transmit motion commands to the robot. For example, the robot compensates heavy weights when the human precisely positions such components.
- In power and force limiting, intentional or unintentional contact between humans and robots are allowed. The robot must be equipped with inherent safety systems to ensure that the hazard limits for quasi-static and transient contact are not exceeded. The ISO/TS 15066 standard outlines these hazard limits.
4.6. Ergonomics and Health
5. Summary
6. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BG ETEM | Berufsgenossenschaft Energie Textil Elektro Medienerzeugnisse |
| HRC | Human–Robot Collaboration |
| HRI | Human–Robot Interaction |
| IASU | Institute for Occupational, Social and Environmental Medicine |
| IGMR | Institute for Mechanism Theory, Machine Dynamics and Robotics |
| MSD | Musculoskeletal Disorder |
| RWTH | Rheinisch-Westfälische Technische Hochschule |
| VIA | Variable Impedance Control |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | References |
|---|---|
| Collaboration | [55,63,75,89,94,113,114,122,124,125,135,163,164,165,166,167,168,169,170,171,172,173,174,175] |
| Synchronization | [63,72,85,112,121,124,176,177,178,179,180,181,182,183,184] |
| Cooperation | [22,82,83,84,185] |
| Coexistence | [63,91,124,186] |
| Category | References |
|---|---|
| Subordinate | [98,101,103,187] |
| Equality | [22,55,63,75,82,83,84,85,89,94,100,101,102,113,114,121,122,124,125,135,163,164,165,166,167,169,170,171,172,173,174,175,176,177,178,179,180,182,184,185,188,189] |
| Supervisor | [72,91,104,105,112,168,181,183,186,190] |
| Category | References |
|---|---|
| Haptic Control Interfaces | [91,112,113,114,125,173] |
| Vision-based Contactless Control Interfaces | [100,107,108,110] |
| Speech-based Contactless Control Interfaces | [89,100,101,102,103,105,165,174,180,183,188,189,190,191,192,193] |
| Conventional Control Interfaces | [63,75,80,83,84,85,94,98,100,124,164,166,168,169,170,171,172,175,181,182,186,194] |
| Category | References |
|---|---|
| Power and Force Limiting | [55,75,84,91,104,112,114,124,125,165,168,169,170,171,172,175,179] |
| Hand Guiding | [75,94,112,113,114,124,125,135,165,173,175] |
| Speed and Separation Monitoring | [55,63,75,82,85,114,121,124,135,165,168,169,175,176,184] |
| Safety-Rated Monitored Stop | [55,63,72,75,82,84,89,121,122,124,135,164,165,169,170,171,172,174,175,176,180,181,182,185,186,175] |
References
- Simões, A.C.; Pinto, A.; Santos, J.; Pinheiro, S.; Romero, D. Designing human-robot collaboration (HRC) workspaces in industrial settings: A systemic literature review. J. Manuf. Syst. 2022, 62, 28–43. [Google Scholar] [CrossRef]
- Hentout, A.; Aouache, M.; Maoudj, A.; Akli, I. Human–robot interaction in industrial collaborative robotics: A literature review of the decade 2008–2017. Adv. Robot. 2019, 33, 764–799. [Google Scholar] [CrossRef]
- Segura, P.; Lobato-Calleros, O.; Ramírez-Serrano, A.; Soria, I. Human-robot collaborative systems: Structural components for current manufacturing applications. Adv. Ind. Manuf. Eng. 2021, 3, 100060. [Google Scholar] [CrossRef]
- Tsarouchi, P.; Makris, S.; Chryssolouris, G. Human–robot interaction review and challenges on task planning and programming. Int. J. Comput. Integr. Manuf. 2016, 29, 916–931. [Google Scholar] [CrossRef]
- Lasi, H.; Fettke, P.; Kemper, H.G.; Feld, T.; Hoffmann, M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242. [Google Scholar] [CrossRef]
- Alcácer, V.; Cruz-Machado, V. Scanning the Industry 4.0: A Literature Review on Technologies for Manufacturing Systems. Eng. Sci. Technol. Int. J. 2019, 22, 899–919. [Google Scholar] [CrossRef]
- Von Stietencron, M.; Hribernik, K.; Lepenioti, K.; Bousdekis, A.; Lewandowski, M.; Apostolou, D.; Mentzas, G. Towards logistics 4.0: An edge-cloud software framework for big data analytics in logistics processes. Int. J. Prod. Res. 2022, 60, 5994–6012. [Google Scholar] [CrossRef]
- Kumar, N.; Lee, S.C. Human-machine interface in smart factory: A systematic literature review. Technol. Forecast. Soc. Chang. 2022, 174, 121284. [Google Scholar] [CrossRef]
- Kolbeinsson, A.; Lagerstedt, E.; Lindblom, J. Foundation for a classification of collaboration levels for human-robot cooperation in manufacturing. Prod. Manuf. Res. 2019, 7, 448–471. [Google Scholar] [CrossRef] [Green Version]
- Sheridan, T.B. Human-Robot Interaction: Status and Challenges. Hum. Factors 2016, 58, 525–532. [Google Scholar] [CrossRef]
- Pereira, A.C.; Romero, F. A review of the meanings and the implications of the Industry 4.0 concept. Procedia Manuf. 2017, 13, 1206–1214. [Google Scholar] [CrossRef]
- Sparrow, D.E.; Kruger, K.; Basson, A.H. An architecture to facilitate the integration of human workers in Industry 4.0 environments. Int. J. Prod. Res. 2022, 60, 4778–4796. [Google Scholar] [CrossRef]
- Xu, L.D.; Xu, E.L.; Li, L. Industry 4.0: State of the art and future trends. Int. J. Prod. Res. 2018, 56, 2941–2962. [Google Scholar] [CrossRef] [Green Version]
- Fantini, P.; Pinzone, M.; Taisch, M. Placing the operator at the centre of Industry 4.0 design: Modelling and assessing human activities within cyber-physical systems. Comput. Ind. Eng. 2020, 139, 105058. [Google Scholar] [CrossRef]
- Zhong, R.Y.; Xu, X.; Klotz, E.; Newman, S.T. Intelligent Manufacturing in the Context of Industry 4.0: A Review. Engineering 2017, 3, 616–630. [Google Scholar] [CrossRef]
- Pauliková, A.; Gyurák Babeľová, Z.; Ubárová, M. Analysis of the Impact of Human-Cobot Collaborative Manufacturing Implementation on the Occupational Health and Safety and the Quality Requirements. Int. J. Environ. Res. Public Health 2021, 18, 1927. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Substantial capabilities of robotics in enhancing industry 4.0 implementation. Cogn. Robot. 2021, 1, 58–75. [Google Scholar] [CrossRef]
- Bhatt, P.M.; Malhan, R.K.; Shembekar, A.V.; Yoon, Y.J.; Gupta, S.K. Expanding capabilities of additive manufacturing through use of robotics technologies: A survey. Addit. Manuf. 2020, 31, 100933. [Google Scholar] [CrossRef]
- Dolgui, A.; Sgarbossa, F.; Simonetto, M. Design and management of assembly systems 4.0: Systematic literature review and research agenda. Int. J. Prod. Res. 2022, 60, 184–210. [Google Scholar] [CrossRef]
- Federal Ministry of Labour and Social Affairs. Reimagining Work: White Paper Work 4.0, EU28, Germany; 2017. [Google Scholar]
- Cañas, H.; Mula, J.; Díaz-Madroñero, M.; Campuzano-Bolarín, F. Implementing Industry 4.0 principles. Comput. Ind. Eng. 2021, 158, 107379. [Google Scholar] [CrossRef]
- Malik, A.A.; Bilberg, A. Framework to Implement Collaborative Robots In Manual Assembly: A Lean Automation Approach. In DAAAM Proceedings; DAAAM International Vienna: Vienna, Austria, 2017; pp. 1151–1160. [Google Scholar] [CrossRef]
- Franklin, C.S.; Dominguez, E.G.; Fryman, J.D.; Lewandowski, M.L. Collaborative robotics: New era of human-robot cooperation in the workplace. J. Saf. Res. 2020, 74, 153–160. [Google Scholar] [CrossRef] [PubMed]
- Rabby, K.M.; Khan, M.; Karimoddini, A.; Jiang, S.X. An Effective Model for Human Cognitive Performance within a Human-Robot Collaboration Framework. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 3872–3877. [Google Scholar] [CrossRef]
- Poot, L.; Johansen, K.; Gopinath, V. Supporting risk assessment of human-robot collaborative production layouts: A proposed design automation framework. Procedia Manuf. 2018, 25, 543–548. [Google Scholar] [CrossRef]
- Pinheiro, S.; Correia Simões, A.; Pinto, A.; Van Acker, B.B.; Bombeke, K.; Romero, D.; Vaz, M.; Santos, J. Ergonomics and Safety in the Design of Industrial Collaborative Robotics. In Occupational and Environmental Safety and Health III; Springer: Berlin/Heidelberg, Germany, 2021; pp. 465–478. [Google Scholar] [CrossRef]
- Weidemann, C.; Garus, C. Publication Database on the Recent Trends and Perspectives of Collaborative Robotics in Working World 4.0; Zenodo: Geneva, Switzerland, 2023. [Google Scholar] [CrossRef]
- Gao, Z.; Wanyama, T.; Singh, I.; Gadhrri, A.; Schmidt, R. From Industry 4.0 to Robotics 4.0—A Conceptual Framework for Collaborative and Intelligent Robotic Systems. Procedia Manuf. 2020, 46, 591–599. [Google Scholar] [CrossRef]
- Fromhold-Eisebith, M.; Marschall, P.; Peters, R.; Thomes, P. Torn between digitized future and context dependent past—How implementing ‘Industry 4.0’ production technologies could transform the German textile industry. Technol. Forecast. Soc. Chang. 2021, 166, 120620. [Google Scholar] [CrossRef]
- Oubari, A.; Pischke, D.; Jenny, M.; Meißner, A.; Trübswetter, A. Mensch-Roboter-Kollaboration in der Produktion: Motivation und Einstellungen von Entscheidungsträgern in produzierenden Unternehmen. Z. FüR Wirtsch. Fabr. 2018, 113, 560–564. [Google Scholar] [CrossRef]
- International Federation of Robotics. Market Presentation World Robotics 2022 Extended Version. 2022. Available online: https://ifr.org/downloads/press2018/2022_WR_extended_version.pdf (accessed on 23 January 2023).
- Wischmann, S. Arbeitssystemgestaltung im Spannungsfeld zwischen Organisation und Mensch–Technik-Interaktion—Das Beispiel Robotik. In Zukunft der Arbeit in Industrie 4.0; Springer: Berlin/Heidelberg, Germany, 2014; pp. 149–160. [Google Scholar] [CrossRef] [Green Version]
- Graessler, I.; Poehler, A. Human-centric design of cyber-physical production systems. Procedia CIRP 2019, 84, 251–256. [Google Scholar] [CrossRef]
- Follini, C.; Terzer, M.; Marcher, C.; Giusti, A.; Matt, D.T. Combining the Robot Operating System with Building Information Modeling for Robotic Applications in Construction Logistics. In Advances in Service and Industrial Robotics; Springer: Berlin/Heidelberg, Germany, 2020; pp. 245–253. [Google Scholar] [CrossRef]
- Tavares, P.; Costa, C.M.; Rocha, L.; Malaca, P.; Costa, P.; Moreira, A.P.; Sousa, A.; Veiga, G. Collaborative Welding System using BIM for Robotic Reprogramming and Spatial Augmented Reality. Autom. Constr. 2019, 106, 102825. [Google Scholar] [CrossRef]
- Hirsch-Kreinsen, H. Entwicklungsperspektiven von Produktionsarbeit. In Zukunft der Arbeit in Industrie 4.0; Springer: Berlin/Heidelberg, Germany, 2014; pp. 89–98. [Google Scholar] [CrossRef] [Green Version]
- Tan, J.T.C.; Duan, F.; Kato, R.; Arai, T. Safety Strategy for Human–Robot Collaboration: Design and Development in Cellular Manufacturing. Adv. Robot. 2010, 24, 839–860. [Google Scholar] [CrossRef]
- Meziane, R.; Li, P.; Otis, M.J.D.; Ezzaidi, H.; Cardou, P. Safer hybrid workspace using human-robot interaction while sharing production activities. In Proceedings of the 2014 IEEE International Symposium on Robotic and Sensors Environments (ROSE) Proceedings, Timisoara, Romania, 16–18 October 2014; pp. 37–42. [Google Scholar] [CrossRef]
- Ronzoni, M.; Accorsi, R.; Botti, L.; Manzini, R. A support-design framework for Cooperative Robots systems in labor-intensive manufacturing processes. J. Manuf. Syst. 2021, 61, 646–657. [Google Scholar] [CrossRef]
- Ranz, F.; Hummel, V.; Sihn, W. Capability-based Task Allocation in Human-robot Collaboration. Procedia Manuf. 2017, 9, 182–189. [Google Scholar] [CrossRef]
- Bezrucav, S.O.; Corves, B. Modelling Automated Planning Problems for Teams of Mobile Manipulators in a Generic Industrial Scenario. Appl. Sci. 2022, 12, 2319. [Google Scholar] [CrossRef]
- Weiss, A.; Wortmeier, A.K.; Kubicek, B. Cobots in Industry 4.0: A Roadmap for Future Practice Studies on Human–Robot Collaboration. IEEE Trans. Hum.-Mach. Syst. 2021, 51, 335–345. [Google Scholar] [CrossRef]
- Eichhorst, W.; Buhlmann, F. Die Zukunft der Arbeit und der Wandel der Arbeitswelt; Forschungsinstitut zur Zukunft der Arbeit (IZA): Bonn, Germany, 2015. [Google Scholar]
- Weidemann, C.; Hüsing, E.; Freischlad, Y.; Mandischer, N.; Corves, B.; Hüsing, M. RAMB: Validation of a Software Tool for Determining Robotic Assistance for People with Disabilities in First Labor Market Manufacturing Applications. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 2269–2274. [Google Scholar] [CrossRef]
- Grote, G. Die Grenzen der Kontrollierbarkeit komplexer Systeme. In Management Komplexer Systeme; Weyer, J., Schulz-Schaeffer, I., Eds.; Oldenbourg Wissenschaftsverlag: Munich, Germany, 2009; pp. 149–168. [Google Scholar]
- Ajoudani, A.; Zanchettin, A.M.; Ivaldi, S.; Albu-Schäffer, A.; Kosuge, K.; Khatib, O. Progress and prospects of the human–robot collaboration. Auton. Robot. 2018, 42, 957–975. [Google Scholar] [CrossRef] [Green Version]
- Mandischer, N.; Gürtler, M.; Weidemann, C.; Hüsing, E.; Bezrucav, S.O.; Gossen, D.; Brünjes, V.; Hüsing, M.; Corves, B. Toward Adaptive Human–Robot Collaboration for the Inclusion of People with Disabilities in Manual Labor Tasks. Electronics 2023, 12, 1118. [Google Scholar] [CrossRef]
- Deuse, J.; Weisner, K.; Hengstebeck, A.; Busch, F. Gestaltung von Produktionssystemen im Kontext von Industrie 4.0. In Zukunft der Arbeit in Industrie 4.0; Springer: Berlin/Heidelberg, Germany, 2014; pp. 99–109. [Google Scholar] [CrossRef] [Green Version]
- Liao, Y.; Deschamps, F.; Loures, E.d.F.R.; Ramos, L.F.P. Past, present and future of Industry 4.0 - a systematic literature review and research agenda proposal. Int. J. Prod. Res. 2017, 55, 3609–3629. [Google Scholar] [CrossRef]
- Erol, S.; Jäger, A.; Hold, P.; Ott, K.; Sihn, W. Tangible Industry 4.0: A Scenario-Based Approach to Learning for the Future of Production. Procedia CIRP 2016, 54, 13–18. [Google Scholar] [CrossRef]
- Krüger, J.; Lien, T.K.; Verl, A. Cooperation of human and machines in assembly lines. CIRP Annals 2009, 58, 628–646. [Google Scholar] [CrossRef]
- Angerer, A.; Hoffmann, A.; Schierl, A.; Vistein, M.; Reif, W. The Robotics API: An object-oriented framework for modeling industrial robotics applications. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 4036–4041. [Google Scholar] [CrossRef] [Green Version]
- Tellaeche, A.; Maurtua, I.; Ibarguren, A. Human robot interaction in industrial robotics. Examples from research centers to industry. In Proceedings of the 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), Luxembourg, 8–11 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Kopp, T.; Baumgartner, M.; Kinkel, S. Success factors for introducing industrial human-robot interaction in practice: An empirically driven framework. Int. J. Adv. Manuf. Technol. 2020, 112, 685–704. [Google Scholar] [CrossRef]
- Cherubini, A.; Passama, R.; Crosnier, A.; Lasnier, A.; Fraisse, P. Collaborative manufacturing with physical human–robot interaction. Robot. -Comput.-Integr. Manuf. 2016, 40, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Chandrasekaran, B.; Conrad, J.M. Human-robot collaboration: A survey. In Proceedings of the SoutheastCon 2015, Fort Lauderdale, FL, USA, 9–12 April 2015. [Google Scholar] [CrossRef]
- Schmidtler, J.; Knott, V.; Hölzel, C.; Bengler, K. Human Centered Assistance Applications for the working environment of the future. Occup. Ergon. 2015, 12, 83–95. [Google Scholar] [CrossRef]
- De Santis, A.; Siciliano, B.; De Luca, A.; Bicchi, A. An atlas of physical human–robot interaction. Mech. Mach. Theory 2008, 43, 253–270. [Google Scholar] [CrossRef] [Green Version]
- Fang, H.C.; Ong, S.K.; Nee, A.Y.C. A novel augmented reality-based interface for robot path planning. Int. J. Interact. Des. Manuf. (IJIDeM) 2013, 8, 33–42. [Google Scholar] [CrossRef]
- Goodrich, M.A.; Schultz, A.C. Human-Robot Interaction: A Survey. Found. Trends Hum. Comput. Interact. 2007, 1, 203–275. [Google Scholar] [CrossRef]
- Mandischer, N.; Weidemann, C.; Hüsing, M.; Corves, B. Non-Contact Safety for Stationary Robots Through Optical Entry Detection With a Co-Moving 3D-Camera. In Proceedings of the 2022 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Prague, Czech Republic, 9–12 October 2022; pp. 994–999. [Google Scholar] [CrossRef]
- Behrens, R.; Saenz, J.; Vogel, C.; Elkmann, N. Upcoming technologies and fundamentals for safeguarding all forms of human-robot collaboration. In Proceedings of the 8th International Conference Safety of Industrial Automated Systems (SIAS 2015), Königswinter, Germany, 18–20 November 2015; pp. 18–20. [Google Scholar]
- Aaltonen, I.; Salmi, T.; Marstio, I. Refining levels of collaboration to support the design and evaluation of human-robot interaction in the manufacturing industry. Procedia CIRP 2018, 72, 93–98. [Google Scholar] [CrossRef]
- Bauer, W.; Bender, M.; Braun, M.; Rally, P.; Scholtz, O. Lightweight Robots in Manual Assembly—Best to Start Simply! Examining Companies’ Initial Experiences with Lightweight Robots; Technical Report; 2016. [Google Scholar]
- Wang, N.; Zeng, Y.; Geng, J. A Brief Review on Safety Strategies of Physical Human-robot Interaction. ITM Web Conf. 2019, 25, 01015. [Google Scholar] [CrossRef]
- Andrisano, A.O.; Leali, F.; Pellicciari, M.; Pini, F.; Vergnano, A. Hybrid Reconfigurable System design and optimization through virtual prototyping and digital manufacturing tools. Int. J. Interact. Des. Manuf. 2011, 6, 17–27. [Google Scholar] [CrossRef]
- Faber, M.; Bützler, J.; Schlick, C.M. Human-robot Cooperation in Future Production Systems: Analysis of Requirements for Designing an Ergonomic Work System. Procedia Manuf. 2015, 3, 510–517. [Google Scholar] [CrossRef] [Green Version]
- De Luca, A.; Flacco, F. Integrated control for pHRI: Collision avoidance, detection, reaction and collaboration. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; pp. 288–295. [Google Scholar] [CrossRef]
- Flacco, F.; Kroeger, T.; De Luca, A.; Khatib, O. A Depth Space Approach for Evaluating Distance to Objects. J. Intell. Rob. Syst. 2014, 80, 7–22. [Google Scholar] [CrossRef]
- Cherubini, A.; Passama, R.; Meline, A.; Crosnier, A.; Fraisse, P. Multimodal control for human-robot cooperation. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Wang, L. Gesture recognition for human-robot collaboration: A review. Int. J. Ind. Ergon. 2018, 68, 355–367. [Google Scholar] [CrossRef]
- Tsarouchi, P.; Athanasatos, A.; Makris, S.; Chatzigeorgiou, X.; Chryssolouris, G. High Level Robot Programming Using Body and Hand Gestures. Procedia CIRP 2016, 55, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Mörtl, A.; Lawitzky, M.; Kucukyilmaz, A.; Sezgin, M.; Basdogan, C.; Hirche, S. The role of roles: Physical cooperation between humans and robots. Int. J. Rob. Res. 2012, 31, 1656–1674. [Google Scholar] [CrossRef] [Green Version]
- Mainprice, J.; Sisbot, E.A.; Siméon, T.; Alami, R. Planning Safe and Legible Hand-over Motions for Human-Robot Interaction. In Proceedings of the IARP, Workshop on Technical Challenges for Dependable Robots in Human Environments, Toulouse, France, 16–17 June 2010. [Google Scholar]
- Fujii, M.; Murakami, H.; Sonehara, M. Study on application of a human-robot collaborative system using hand-guiding in a production line. IHI Eng. Rev. 2016, 49, 24–29. [Google Scholar]
- Pons, N.T. Standardization in Human Robot Interaction. Master’s Thesis, University of Oulu, Oulu, Finland, 2013. [Google Scholar]
- Restrepo, S.S.; Raiola, G.; Chevalier, P.; Lamy, X.; Sidobre, D. Iterative virtual guides programming for human-robot comanipulation. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017; pp. 219–226. [Google Scholar] [CrossRef] [Green Version]
- Gualtieri, L.; Rauch, E.; Vidoni, R. Emerging research fields in safety and ergonomics in industrial collaborative robotics: A systematic literature review. Robot. -Comput.-Integr. Manuf. 2021, 67, 101998. [Google Scholar] [CrossRef]
- Müller, R.; Franke, J.; Henrich, D.; Kuhlenkötter, B.; Raatz, A.; Verl, A. (Eds.) Handbuch Mensch-Roboter-Kollaboration; Carl Hanser Verlag München: Munich, Germany, 2019. [Google Scholar]
- Elprama, S.; El Makrini, I.; Vanderborght, B.; Jacobs, A. Acceptance of collaborative robots by factory workers: A pilot study on the role of social cues of anthropomorphic robots. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication, New York, NY, USA, 26–31 August 2016. [Google Scholar]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Altman, D.; Antes, G.; Atkins, D.; Barbour, V.; Barrowman, N.; Berlin, J.A.; et al. Preferred reporting items for systematic reviews and meta-analyses: The PRISMA statement. PLoS Med. 2009, 6, e1000097. [Google Scholar] [CrossRef] [Green Version]
- Rahman, S.; Wang, Y. Mutual trust-based subtask allocation for human–robot collaboration in flexible lightweight assembly in manufacturing. Mechatronics 2018, 54, 94–109. [Google Scholar] [CrossRef]
- Gualtieri, L.; Palomba, I.; Merati, F.A.; Rauch, E.; Vidoni, R. Design of Human-Centered Collaborative Assembly Workstations for the Improvement of Operators’ Physical Ergonomics and Production Efficiency: A Case Study. Sustainability 2020, 12, 3606. [Google Scholar] [CrossRef]
- Müller, R.; Vette, M.; Scholer, M. Robot Workmate: A Trustworthy Coworker for the Continuous Automotive Assembly Line and its Implementation. Procedia CIRP 2016, 44, 263–268. [Google Scholar] [CrossRef] [Green Version]
- Realyvásquez-Vargas, A.; Cecilia Arredondo-Soto, K.; Luis García-Alcaraz, J.; Yail Márquez-Lobato, B.; Cruz-García, J. Introduction and configuration of a collaborative robot in an assembly task as a means to decrease occupational risks and increase efficiency in a manufacturing company. Robot. Comput. Integr. Manuf. 2019, 57, 315–328. [Google Scholar] [CrossRef]
- Waurzyniak, P. Fast, Lightweight Robots Help Factories Go Faster. Manuf. Eng. 2015, 154, 55–64. [Google Scholar]
- Pacaux-Lemoine, M.P.; Trentesaux, D.; Zambrano Rey, G.; Millot, P. Designing intelligent manufacturing systems through Human-Machine Cooperation principles: A human-centered approach. Comput. Ind. Eng. 2017, 111, 581–595. [Google Scholar] [CrossRef]
- Harriott, C.E.; Buford, G.L.; Adams, J.A.; Zhang, T. Mental workload and task performance in peer-based human-robot teams. J. Hum. Robot. Interact. 2015, 4, 61–96. [Google Scholar] [CrossRef] [Green Version]
- Berg, J.; Lottermoser, A.; Richter, C.; Reinhart, G. Human-Robot-Interaction for mobile industrial robot teams. Procedia CIRP 2019, 79, 614–619. [Google Scholar] [CrossRef]
- Weidemann, A.; Rußwinkel, N. The Role of Frustration in Human-Robot Interaction—What Is Needed for a Successful Collaboration? Front. Psychol. 2021, 12, 640186. [Google Scholar] [CrossRef]
- Haage, M.; Piperagkas, G.; Papadopoulos, C.; Mariolis, I.; Malec, J.; Bekiroglu, Y.; Hedelind, M.; Tzovaras, D. Teaching Assembly by Demonstration Using Advanced Human Robot Interaction and a Knowledge Integration Framework. Procedia Manuf. 2017, 11, 164–173. [Google Scholar] [CrossRef]
- Wang, W.; Li, R.; Chen, Y.; Diekel, Z.M.; Jia, Y. Facilitating Human–Robot Collaborative Tasks by Teaching-Learning-Collaboration From Human Demonstrations. IEEE Trans. Autom. Sci. Eng. 2018, 16, 640–653. [Google Scholar] [CrossRef]
- Ge, J.G. Programming by demonstration by optical tracking system for dual arm robot. In Proceedings of the IEEE ISR 2013, Seoul, Republic of Korea, 24–26 October 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Ionescu, T.B.; Schlund, S. A Participatory Programming Model for Democratizing Cobot Technology in Public and Industrial Fablabs. Procedia CIRP 2019, 81, 93–98. [Google Scholar] [CrossRef]
- Brandstötter, M.; Komenda, T. Gegenwart und Zukunft kollaborationsfähiger Robotersysteme. Stellenwert Menschlicher Arbeit im Zeitalter der Digitalen Transformation. 2020. Available online: https://www.researchgate.net/profile/Mathias-Brandstoetter/publication/346081874_Gegenwart_und_Zukunft_kollaborationsfahiger_Robotersysteme/links/5fba72f9458515b79761ff46/Gegenwart-und-Zukunft-kollaborationsfaehiger-Robotersysteme.pdf (accessed on 2 June 2023).
- Tobias Kopp, A.S.U.S. Kollaborierende oder kollaborationsfähige Roboter? Welche Rolle spielt die Mensch-Roboter-Kollaboration in der Praxis? Ind. 4.0 Manag. 2020, 36, 19–23. [Google Scholar] [CrossRef]
- Maurtua, I.; Ibarguren, A.; Kildal, J.; Susperregi, L.; Sierra, B. Human-robot collaboration in industrial applications: Safety, interaction and trust. Int. J. Adv. Robot. Syst. 2017, 14, 1–10. [Google Scholar] [CrossRef] [Green Version]
- El Makrini, I.; Merckaert, K.; Lefeber, D.; Vanderborght, B. Design of a collaborative architecture for human-robot assembly tasks. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1624–1629. [Google Scholar] [CrossRef]
- Coupeté, E.; Moutarde, F.; Manitsaris, S. A User-Adaptive Gesture Recognition System Applied to Human-Robot Collaboration in Factories. Proc. 3rd Int. Symp. Mov. Comput. 2016, 1–7. [Google Scholar] [CrossRef] [Green Version]
- Barattini, P.; Morand, C.; Robertson, N.M. A proposed gesture set for the control of industrial collaborative robots. In Proceedings of the 2012 IEEE RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, Paris, France, 9–13 September 2012; pp. 132–137. [Google Scholar] [CrossRef]
- Loper, M.M.; Koenig, N.P.; Chernova, S.H.; Jones, C.V.; Jenkins, O.C. Mobile human-robot teaming with environmental tolerance. In Proceedings of the 2009 4th ACM/IEEE International Conference on Human-Robot Interaction (HRI), La Jolla, CA, USA, 11–13 March 2009; pp. 157–163. [Google Scholar] [CrossRef] [Green Version]
- Potter, L.E.; Araullo, J.; Carter, L. The Leap Motion controller: A view on sign language. In OzCHI ’13: Proceedings of the 25th Australian Computer-Human Interaction Conference: Augmentation, Application, Innovation, Collaboration; Association for Computing Machinery: New York, NY, USA, 2013; pp. 175–178. [Google Scholar] [CrossRef] [Green Version]
- Correa, M.; Ruiz-del Solar, J.; Bernuy, F. Face Recognition for Human-Robot Interaction Applications: A Comparative Study. In RoboCup 2008: Robot Soccer World Cup XII; Springer: Berlin/Heidelberg, Germany, 2009; pp. 473–484. [Google Scholar] [CrossRef]
- Akkaladevi, S.C.; Heindl, C. Action recognition for human robot interaction in industrial applications. In Proceedings of the 2015 IEEE International Conference on Computer Graphics, Vision and Information Security (CGVIS), Bhubaneswar, India, 2–3 November 2015; pp. 94–99. [Google Scholar] [CrossRef]
- Ramirez-Amaro, K.; Dean-Leon, E.; Cheng, G. Robust semantic representations for inferring human co-manipulation activities even with different demonstration styles. In Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), Seoul, Republic of Korea, 3–5 November 2015; pp. 1141–1146. [Google Scholar] [CrossRef]
- Palinko, O.; Rea, F.; Sandini, G.; Sciutti, A. Eye tracking for human robot interaction. In Proceedings of the Ninth Biennial ACM Symposium on Eye Tracking Research & Applications, Charleston, SC, USA, 14–17 March 2016. [Google Scholar] [CrossRef] [Green Version]
- Niculescu, A.I.; Banchs, R.E.; Li, H. Why Industrial Robots Should Become More Social. In Social Robotics; Springer: Berlin/Heidelberg, Germany, 2014; pp. 276–278. [Google Scholar] [CrossRef]
- Bauzano, E.; Estebanez, B.; Garcia-Morales, I.; Muñoz, V.F. Collaborative Human–Robot System for HALS Suture Procedures. IEEE Syst. J. 2014, 10, 957–966. [Google Scholar] [CrossRef]
- Kelley, R.; Tavakkoli, A.; King, C.; Nicolescu, M.; Nicolescu, M. Understanding Activities and Intentions for Human-Robot Interaction; IntechOpen: London, UK, 2010. [Google Scholar] [CrossRef] [Green Version]
- Stenmark, M.; Nugues, P. Natural language programming of industrial robots. In Proceedings of the IEEE ISR 2013, Seoul, Republic of Korea, 24–26 October 2013; pp. 1–5. [Google Scholar] [CrossRef] [Green Version]
- International Organization for Standardization. Robots and Robotic Devices—Collaborative Robots; Technical Report ISO/TS 15066; ISO: Geneva, Switzerland, 2016. [Google Scholar]
- Thomas, C.; Stankiewicz, L.; Grötsch, A.; Wischniewski, S.; Deuse, J.; Kuhlenkötter, B. Intuitive Work Assistance by Reciprocal Human-robot Interaction in the Subject Area of Direct Human-robot Collaboration. Procedia CIRP 2016, 44, 275–280. [Google Scholar] [CrossRef] [Green Version]
- Land, N.; Syberfeldt, A.; Almgren, T.; Vallhagen, J. A Framework for Realizing Industrial Human-Robot Collaboration through Virtual Simulation. Procedia CIRP 2020, 93, 1194–1199. [Google Scholar] [CrossRef]
- Hietanen, A.; Pieters, R.; Lanz, M.; Latokartano, J.; Kämäräinen, J.K. AR-based interaction for human-robot collaborative manufacturing. Rob. Comput. Integr. Manuf. 2020, 63, 101891. [Google Scholar] [CrossRef]
- Grushko, S.; Vysocký, A.; Heczko, D.; Bobovský, Z. Intuitive Spatial Tactile Feedback for Better Awareness about Robot Trajectory during Human–Robot Collaboration. Sensors 2021, 21, 5748. [Google Scholar] [CrossRef] [PubMed]
- Sghaier, A.; Charpentier, P. La problématique de l’utilisation des robots industriels en matière de sécurité. Ann. Des Mines RéAlitéS Ind. 2012, 2012, 24. [Google Scholar] [CrossRef]
- Brending, S.; Lawo, M.; Pannek, J.; Sprodowski, T.; Zeising, P.; Zimmermann, D. Certifiable Software Architecture for Human Robot Collaboration in Industrial Production Environments**This research is part of the joint project InSA (www.insa-projekt.de) funded by the Federal Ministry of Economy and Energy in the context of the initiative Autonomik Industry 4.0. IFAC-PapersOnLine 2017, 50, 1983–1990. [Google Scholar] [CrossRef]
- Vasic, M.; Billard, A. Safety issues in human-robot interactions. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 197–204. [Google Scholar] [CrossRef] [Green Version]
- Asimov, I. I, Robot, 1st ed.; Science Fiction Novel; Doubleday: Garden City, NY, USA, 1950. [Google Scholar]
- Robla-Gómez, S.; Becerra, V.M.; Llata, J.R.; González-Sarabia, E.; Torre-Ferrero, C.; Pérez-Oria, J. Working Together: A Review on Safe Human-Robot Collaboration in Industrial Environments. IEEE Access 2017, 5, 26754–26773. [Google Scholar] [CrossRef]
- Li, K.; Liu, Q.; Xu, W.; Liu, J.; Zhou, Z.; Feng, H. Sequence Planning Considering Human Fatigue for Human-Robot Collaboration in Disassembly. Procedia CIRP 2019, 83, 95–104. [Google Scholar] [CrossRef]
- Peternel, L.; Fang, C.; Tsagarakis, N.; Ajoudani, A. A selective muscle fatigue management approach to ergonomic human-robot co-manipulation. Robot. -Comput.-Integr. Manuf. 2019, 58, 69–79. [Google Scholar] [CrossRef]
- Indri, M.; Trapani, S.; Lazzero, I. A general procedure for collision detection between an industrial robot and the environment. In Proceedings of the 2015 IEEE 20th Conference on Emerging Technologies & Factory Automation (ETFA), Luxembourg, 8–11 September 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Andronas, D.; Argyrou, A.; Fourtakas, K.; Paraskevopoulos, P.; Makris, S. Design of Human Robot Collaboration workstations – Two automotive case studies. Procedia Manuf. 2020, 52, 283–288. [Google Scholar] [CrossRef]
- Ore, F.; Jiménez Sánchez, J.L.; Wiktorsson, M.; Hanson, L. Design method of human–industrial robot collaborative workstation with industrial application. Int. J. Comput. Integr. Manuf. 2020, 33, 911–924. [Google Scholar] [CrossRef]
- Avanzini, G.B.; Ceriani, N.M.; Zanchettin, A.M.; Rocco, P.; Bascetta, L. Safety Control of Industrial Robots Based on a Distributed Distance Sensor. IEEE Trans. Control Syst. Technol. 2014, 22, 2127–2140. [Google Scholar] [CrossRef]
- Quarta, D.; Pogliani, M.; Polino, M.; Maggi, F.; Zanchettin, A.M.; Zanero, S. An Experimental Security Analysis of an Industrial Robot Controller. In Proceedings of the 2017 IEEE Symposium on Security and Privacy (SP), San Jose, CA, USA, 22–26 May 2017; pp. 268–286. [Google Scholar] [CrossRef] [Green Version]
- Haddadin, S.; Haddadin, S.; Khoury, A.; Rokahr, T.; Parusel, S.; Burgkart, R.; Bicchi, A.; Albu-Schäffer, A. A truly safely moving robot has to know what injury it may cause. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 5406–5413. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schaffer, A.; Hirzinger, G. The role of the robot mass and velocity in physical human-robot interaction—Part I: Non-constrained blunt impacts. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1331–1338. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schaffer, A.; Frommberger, M.; Rossmann, J.; Hirzinger, G. The “DLR Crash Report”: Towards a standard crash-testing protocol for robot safety—Part I: Results. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 272–279. [Google Scholar] [CrossRef]
- Haddadin, S.; Albu-Schäeffer, A.; Hirzinger, G. Requirements for Safe Robots: Measurements, Analysis and New Insights. Int. J. Robot. Res. 2009, 28, 1507–1527. [Google Scholar] [CrossRef] [Green Version]
- Patel, S.; Park, H.; Bonato, P.; Chan, L.; Rodgers, M. A review of wearable sensors and systems with application in rehabilitation. J. Neuroeng. Rehabil. 2012, 9, 1–17. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Digo, E.; Pastorelli, S.; Gastaldi, L. A Narrative Review on Wearable Inertial Sensors for Human Motion Tracking in Industrial Scenarios. Robotics 2022, 11, 138. [Google Scholar] [CrossRef]
- Himmelsbach, U.B.; Wendt, T.M.; Lai, M. Towards Safe Speed and Separation Monitoring in Human-Robot Collaboration with 3D-Time-of-Flight Cameras. In Proceedings of the 2018 Second IEEE International Conference on Robotic Computing (IRC), Laguna Hills, CA, USA, 31 January–2 February 2018. [Google Scholar] [CrossRef]
- Gopinath, V.; Johansen, K. Risk Assessment Process for Collaborative Assembly—A Job Safety Analysis Approach. Procedia CIRP 2016, 44, 199–203. [Google Scholar] [CrossRef] [Green Version]
- Chen, F.; Sekiyama, K.; Cannella, F.; Fukuda, T. Optimal subtask allocation for human and robot collaboration within hybrid assembly system. IEEE Trans. Autom. Sci. Eng. 2014, 11, 1065–1075. [Google Scholar] [CrossRef]
- Weitschat, R.; Vogel, J.; Lantermann, S.; Höppner, H. End-effector airbags to accelerate human-robot collaboration. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 2279–2284. [Google Scholar] [CrossRef] [Green Version]
- Bicchi, A.; Peshkin, M.A.; Colgate, J.E. Safety for Physical Human–Robot Interaction. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1335–1348. [Google Scholar] [CrossRef]
- Pervez, A.; Ryu, J. Safe physical human robot interaction-past, present and future. J. Mech. Sci. Technol. 2008, 22, 469–483. [Google Scholar] [CrossRef]
- Groothuis, S.; Carloni, R.; Stramigioli, S. A Novel Variable Stiffness Mechanism Capable of an Infinite Stiffness Range and Unlimited Decoupled Output Motion. Actuators 2014, 3, 107–123. [Google Scholar] [CrossRef] [Green Version]
- Ayoubi, Y.; Laribi, M.A.; Courrèges, F.; Zeghloul, S.; Arsicault, M. A complete methodology to design a safety mechanism for prismatic joint implementation. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 304–309. [Google Scholar] [CrossRef]
- Bicchi, A.; Bavaro, M.; Boccadamo, G.; De Carli, D.; Filippini, R.; Grioli, G.; Piccigallo, M.; Rosi, A.; Schiavi, R.; Sen, S.; et al. Physical human-robot interaction: Dependability, safety, and performance. In Proceedings of the 2008 10th IEEE International Workshop on Advanced Motion Control, Trento, Italy, 26–28 March 2008; pp. 9–14. [Google Scholar] [CrossRef]
- She, Y.; Su, H.J.; Hurd, C.J. Shape Optimization of 2D Compliant Links for Design of Inherently Safe Robots. ASME Digit. Collect. 2016, 57137, V05BT08A004. [Google Scholar] [CrossRef]
- She, Y.; Su, H.J.; Meng, D.; Song, S.; Wang, J. Design and Modeling of a Compliant Link for Inherently Safe Robots. J. Mech. Robot. 2017, 10, 011001. [Google Scholar] [CrossRef] [Green Version]
- Ding, H.; Reißig, G.; Wijaya, K.; Bortot, D.; Bengler, K.; Stursberg, O. Human arm motion modeling and long-term prediction for safe and efficient Human-Robot-Interaction. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5875–5880. [Google Scholar] [CrossRef]
- Vasquez, D.; Fraichard, T.; Laugier, C. Growing Hidden Markov Models: A Tool for Incremental Learning and Prediction of Motion. Int. J. Robot. Res. 2009, 28, 1486–1506. [Google Scholar] [CrossRef] [Green Version]
- Hiatt, L.; Harrison, A.; Trafton, J. Accommodating Human Variability in Human-Robot Teams through Theory of Mind. In Proceedings of the Twenty-Second International Joint Conference on Artificial Intelligence, Catalonia, Spain, 16–22 July 2011; pp. 2066–2071. [Google Scholar] [CrossRef]
- Nikolaidis, S.; Ramakrishnan, R.; Gu, K.; Shah, J. Efficient Model Learning from Joint-Action Demonstrations for Human-Robot Collaborative Tasks. In Proceedings of the Tenth Annual ACM/IEEE International Conference on Human-Robot Interaction, Portland, OR, USA, 2–5 March 2015; pp. 189–196. [Google Scholar] [CrossRef] [Green Version]
- Huang, C.M.; Mutlu, B. Anticipatory robot control for efficient human-robot collaboration. In Proceedings of the 2016 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 83–90. [Google Scholar] [CrossRef]
- Görür, O.; Rosman, B.; Hoffman, G.; Albayrak, S. Toward Integrating Theory of Mind into Adaptive Decision- Making of Social Robots to Understand Human Intention. In Proceedings of the 12th ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017. [Google Scholar]
- Vanderborght, B.; Albu-Schäeffer, A.; Bicchi, A.; Burdet, E.; Caldwell, D.; Carloni, R.; Catalano, M.; Eiberger, O.; Friedl, W.; Ganesh, G.; et al. Variable Impedance Actuators: A Review. Robot. Auton. Syst. 2013, 61, 1601–1614. [Google Scholar] [CrossRef] [Green Version]
- Bicchi, A.; Tonietti, G. Fast and "soft-arm" tactics [robot arm design]. IEEE Rob. Autom. Mag. 2004, 11, 22–33. [Google Scholar] [CrossRef]
- Tagliamonte, N.; Sergi, F.; Accoto, D.; Carpino, G.; Guglielmelli, E. Double actuation architectures for rendering variable impedance in compliant robots: A review. Mechatronics 2012, 22, 1187–1203. [Google Scholar] [CrossRef]
- Maurice, P.; Padois, V.; Measson, Y.; Bidaud, P. Human-oriented design of collaborative robots. Int. J. Ind. Ergon. 2017, 57, 88–102. [Google Scholar] [CrossRef] [Green Version]
- Maurice, P. Virtual Ergonomics for the Design of Collaborative Robots. Ph.D. Thesis, Université Pierre et Marie Curie, Paris, France, 2015. [Google Scholar]
- Jungbluth, J. Recent Progress Toward Intelligent Robot Assistants for Non-Destructive Disassembly. In Proceedings of the Robotix-Academy Conference for Industrial Robotics (RACIR), Luxembourg, 4–5 June 2018. [Google Scholar]
- Gualtieri, L.; Palomba, I.; Wehrle, E.J.; Vidoni, R. The Opportunities and Challenges of SME Manufacturing Automation: Safety and Ergonomics in Human–Robot Collaboration. In Industry 4.0 for SMEs: Challenges, Opportunities and Requirements; Palgrave Macmillan: London, UK, 2020; pp. 105–144. [Google Scholar] [CrossRef] [Green Version]
- European Trade Union Institute. Musculoskeletal Disorders. 2023. Available online: https://www.etui.org/topics/health-safety-working-conditions/musculoskeletal-disorders (accessed on 23 January 2023).
- Melchiorre, M.; Scimmi, L.S.; Mauro, S.; Pastorelli, S.P. Vision-based control architecture for human–robot hand-over applications. Asian J. Control. 2020, 23, 105–117. [Google Scholar] [CrossRef]
- Koppenborg, M.; Nickel, P.; Naber, B.; Lungfiel, A.; Huelke, M. Effects of movement speed and predictability in human-robot collaboration. Hum. Factors Ergon. Manuf. Serv. Ind. 2017, 27, 197–209. [Google Scholar] [CrossRef]
- Melchiorre, M.; Scimmi, L.; Mauro, S.; Pastorelli, S. A Novel Constrained Trajectory Planner for Safe Human-robot Collaboration. In Proceedings of the 19th International Conference on Informatics in Control, Automation and Robotics, Lisbon, Portugal, 14–16 July 2022; pp. 539–548. [Google Scholar] [CrossRef]
- Berx, N.; Decré, W.; Morag, I.; Chemweno, P.; Pintelon, L. Identification and classification of risk factors for human-robot collaboration from a system-wide perspective. Comput. Ind. Eng. 2022, 163, 107827. [Google Scholar] [CrossRef]
- Aljinovic, A.; Crnjac, M.; Nikola, G.; Mladineo, M.; Basic, A.; Ivica, V. Integration of the human-robot system in the learning factory assembly process. Procedia Manuf. 2020, 45, 158–163. [Google Scholar] [CrossRef]
- Antonelli, D.; Stadnicka, D. Predicting and preventing mistakes in human-robot collaborative assembly. IFAC-PapersOnLine 2019, 52, 743–748. [Google Scholar] [CrossRef]
- Bae, J.; Kim, K.; Huh, J.; Hong, D. Variable Admittance Control With Virtual Stiffness Guidance for Human-Robot Collaboration. IEEE Access 2020, 8, 117335–117346. [Google Scholar] [CrossRef]
- Ding, Y.; Xu, W.; Liu, Z.; Zhou, Z.; Pham, D.T. Robotic Task Oriented Knowledge Graph for Human-Robot Collaboration in Disassembly. Procedia CIRP 2019, 83, 105–110. [Google Scholar] [CrossRef]
- Fast-Berglund, Å.; Palmkvist, F.; Nyqvist, P.; Ekered, S.; Åkerman, M. Evaluating Cobots for Final Assembly. Procedia CIRP 2016, 44, 175–180. [Google Scholar] [CrossRef] [Green Version]
- Gervasi, R.; Digiaro, F.; Mastrogiacomo, L.; Maisano, D.; Franceschini, F. Comparing Quality Profiles in Human-Robot Collaboration: Empirical Evidence in the Automotive Sector. In Proceedings Book of the 4th International Conference on Quality Engineering and Management; University of Minho: Braga, Portugal, 2020. [Google Scholar]
- Hanna, A.; Bengtsson, K.; Gotvall, P.L.; Ekstrom, M. Towards safe human robot collaboration - Risk assessment of intelligent automation. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020. [Google Scholar] [CrossRef]
- Huang, J.; Pham, D.T.; Wang, Y.; Qu, M.; Ji, C.; Su, S.; Xu, W.; Liu, Q.; Zhou, Z. A case study in human–robot collaboration in the disassembly of press-fitted components. Proc. Inst. Mech. Eng. Part J. Eng. Manuf. 2019, 234, 654–664. [Google Scholar] [CrossRef]
- Murali, P.K.; Darvish, K.; Mastrogiovanni, F. Deployment and evaluation of a flexible human–robot collaboration model based on AND/OR graphs in a manufacturing environment. Intell. Serv. Robot. 2020, 13, 439–457. [Google Scholar] [CrossRef]
- Raessa, M.; Chen, J.C.Y.; Wan, W.; Harada, K. Human-in-the-Loop Robotic Manipulation Planning for Collaborative Assembly. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1800–1813. [Google Scholar] [CrossRef] [Green Version]
- Rückert, P.; Tracht, K.; Herfs, W.; Roggendorf, S.; Schubert, V.; Schneider, M. Consolidation of product lifecycle information within human-robot collaboration for assembly of multi-variant products. Procedia Manuf. 2020, 49, 217–221. [Google Scholar] [CrossRef]
- Tsarouchi, P.; Makris, S.; Chryssolouris, G. On a Human and Dual-arm Robot Task Planning Method. Procedia CIRP 2016, 57, 551–555. [Google Scholar] [CrossRef]
- Vosniakos, G.C.; Ouillon, L.; Matsas, E. Exploration of two safety strategies in human-robot collaborative manufacturing using Virtual Reality. Procedia Manuf. 2019, 38, 524–531. [Google Scholar] [CrossRef]
- Berg, J.; Gebauer, D.; Reinhart, G. Method for the evaluation of layout options for a human-robot collaboration. Procedia CIRP 2019, 83, 139–145. [Google Scholar] [CrossRef]
- Casalino, A.; Cividini, F.; Zanchettin, A.M.; Piroddi, L.; Rocco, P. Human-robot collaborative assembly: A use-case application. IFAC-PapersOnLine 2018, 51, 194–199. [Google Scholar] [CrossRef]
- Cesta, A.; Orlandini, A.; Bernardi, G.; Umbrico, A. Towards a planning-based framework for symbiotic human-robot collaboration. In Proceedings of the 2016 IEEE 21st International Conference on Emerging Technologies and Factory Automation (ETFA), Berlin, Germany, 6–9 September 2016. [Google Scholar] [CrossRef]
- El Makrini, I.; Merckaert, K.; Winter, J.D.; Lefeber, D.; Vanderborght, B. Task allocation for improved ergonomics in Human-Robot Collaborative Assembly. Interact. Stud. 2019, 20, 102–133. [Google Scholar] [CrossRef]
- Magrini, E.; Ferraguti, F.; Ronga, A.J.; Pini, F.; Luca, A.D.; Leali, F. Human-robot coexistence and interaction in open industrial cells. Robot. Comput. Integr. Manuf. 2020, 61, 101846. [Google Scholar] [CrossRef]
- Messeri, C.; Zanchettin, A.M.; Rocco, P. Human-Robot Assembly Task with Holographic Projections for Inexperienced Operators. In Proceedings of the 2020 4th International Conference on Automation, Control and Robots (ICACR), Rome, Italy, 11–13 October 2020. [Google Scholar] [CrossRef]
- Tlach, V.; Kuric, I.; Ságová, Z.; Zajačko, I. Collaborative assembly task realization using selected type of a human-robot interaction. Transp. Res. Procedia 2019, 40, 541–547. [Google Scholar] [CrossRef]
- Tsarouchi, P.; Matthaiakis, A.S.; Makris, S.; Chryssolouris, G. On a human-robot collaboration in an assembly cell. Int. J. Comput. Integr. Manuf. 2017, 30, 580–589. [Google Scholar] [CrossRef] [Green Version]
- Weßkamp, V.; Seckelmann, T.; Barthelmey, A.; Kaiser, M.; Lemmerz, K.; Glogowski, P.; Kuhlenkötter, B.; Deuse, J. Development of a sociotechnical planning system for human-robot interaction in assembly systems focusing on small and medium-sized enterprises. Procedia CIRP 2019, 81, 1284–1289. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, Q.; Xu, W.; Liu, Z.; Zhou, Z.; Chen, J. Deep Learning-based Human Motion Prediction considering Context Awareness for Human-Robot Collaboration in Manufacturing. Procedia CIRP 2019, 83, 272–278. [Google Scholar] [CrossRef]
- Matthaiakis, S.A.; Dimoulas, K.; Athanasatos, A.; Mparis, K.; Dimitrakopoulos, G.; Gkournelos, C.; Papavasileiou, A.; Fousekis, N.; Papanastasiou, S.; Michalos, G.; et al. Flexible Programming Tool Enabling Synergy between Human and Robot. Procedia Manuf. 2017, 11, 431–440. [Google Scholar] [CrossRef]
- Bdiwi, M. Integrated Sensors System for Human Safety during Cooperating with Industrial Robots for Handing-over and Assembling Tasks. Procedia CIRP 2014, 23, 65–70. [Google Scholar] [CrossRef]
- Hernoux, F.; Béarée, R.; Gibaru, O. Investigation of dynamic 3D hand motion reproduction by a robot using a Leap Motion. In Proceedings of the 2015 Virtual Reality International Conference, Laval, France, 8–10 April 2015. [Google Scholar] [CrossRef]
- Peppoloni, L.; Brizzi, F.; Avizzano, C.A.; Ruffaldi, E. Immersive ROS-integrated framework for robot teleoperation. In Proceedings of the 2015 IEEE Symposium on 3D User Interfaces (3DUI), Arles, France, 23–24 March 2015. [Google Scholar] [CrossRef]
- Ramirez-Amaro, K.; Beetz, M.; Cheng, G. Understanding the intention of human activities through semantic perception: Observation, understanding and execution on a humanoid robot. Adv. Robot. 2015, 29, 345–362. [Google Scholar] [CrossRef]
- Bee, N.; André, E.; Tober, S. Breaking the Ice in Human-Agent Communication: Eye-Gaze Based Initiation of Contact with an Embodied Conversational Agent. In Intelligent Virtual Agents; Springer: Berlin/Heidelberg, Germany, 2009; pp. 229–242. [Google Scholar] [CrossRef] [Green Version]
- Fischer, K.; Jensen, L.C.; Kirstein, F.; Stabinger, S.; Erkent, Ö.; Shukla, D.; Piater, J. The Effects of Social Gaze in Human-Robot Collaborative Assembly. In Social Robotics; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 204–213. [Google Scholar] [CrossRef]
- Wu, J.; Konrad, J.; Ishwar, P. Dynamic time warping for gesture-based user identification and authentication with Kinect. In Proceedings of the 2013 IEEE International Conference on Acoustics, Speech and Signal Processing, Vancouver, BC, Canada, 26–31 May 2013. [Google Scholar] [CrossRef]
- Elprama, S.A.; Jewell, C.I.; Jacobs, A.; Makrini, I.E.; Vanderborght, B. Attitudes of Factory Workers towards Industrial and Collaborative Robots. In Proceedings of the Companion of the 2017 ACM/IEEE International Conference on Human-Robot Interaction, Vienna, Austria, 6–9 March 2017. [Google Scholar] [CrossRef]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weidemann, C.; Mandischer, N.; van Kerkom, F.; Corves, B.; Hüsing, M.; Kraus, T.; Garus, C. Literature Review on Recent Trends and Perspectives of Collaborative Robotics in Work 4.0. Robotics 2023, 12, 84. https://doi.org/10.3390/robotics12030084
Weidemann C, Mandischer N, van Kerkom F, Corves B, Hüsing M, Kraus T, Garus C. Literature Review on Recent Trends and Perspectives of Collaborative Robotics in Work 4.0. Robotics. 2023; 12(3):84. https://doi.org/10.3390/robotics12030084
Chicago/Turabian StyleWeidemann, Carlo, Nils Mandischer, Frederick van Kerkom, Burkhard Corves, Mathias Hüsing, Thomas Kraus, and Cyryl Garus. 2023. "Literature Review on Recent Trends and Perspectives of Collaborative Robotics in Work 4.0" Robotics 12, no. 3: 84. https://doi.org/10.3390/robotics12030084