

Transformable Wheelchair–Exoskeleton Hybrid Robot for Assisting Human Locomotion

Abstract
:1. Introduction
2. Concept of the Wheelchair–Exoskeleton Hybrid Robot
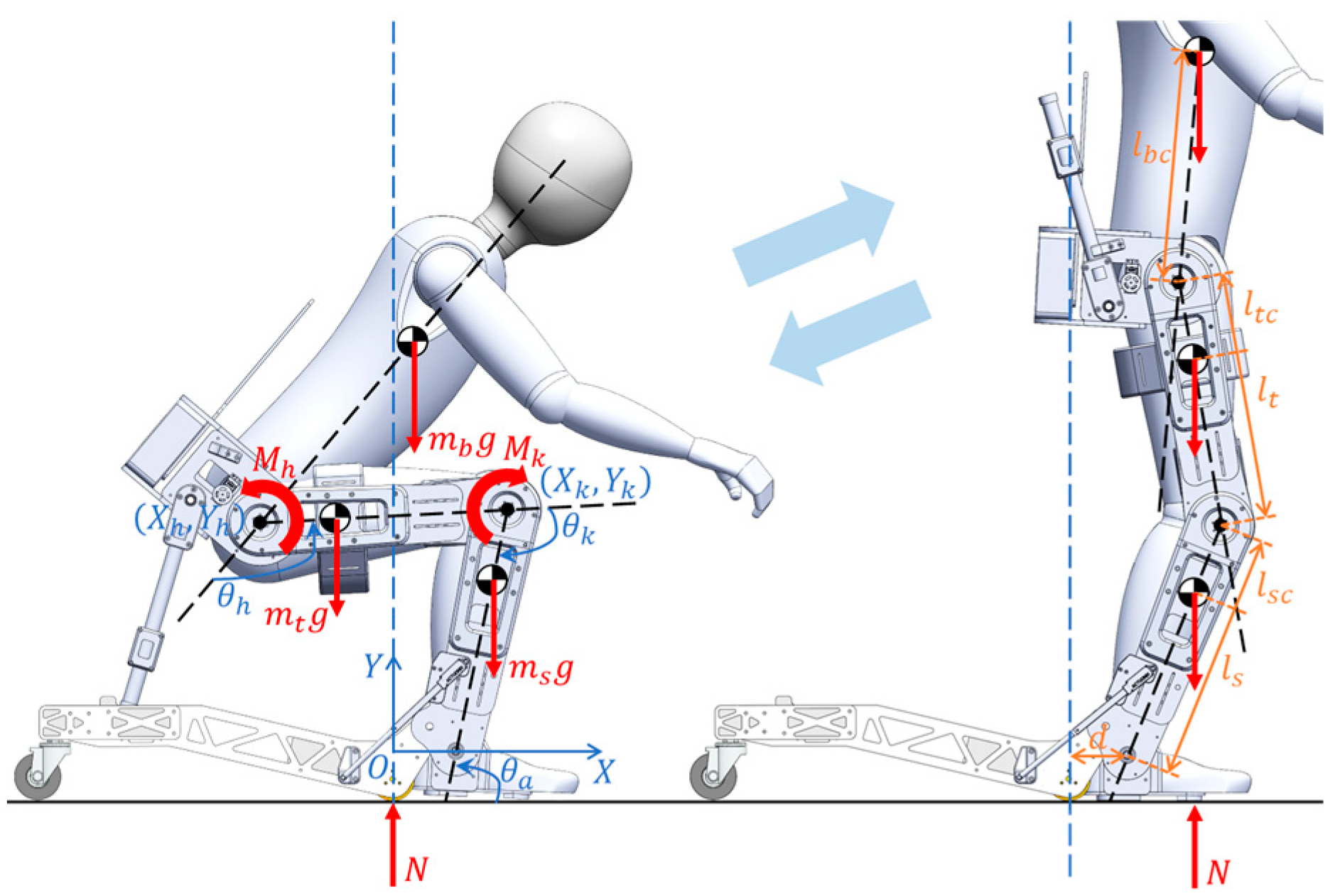
2.1. Biomechanics of Sit-to-Stand Motion
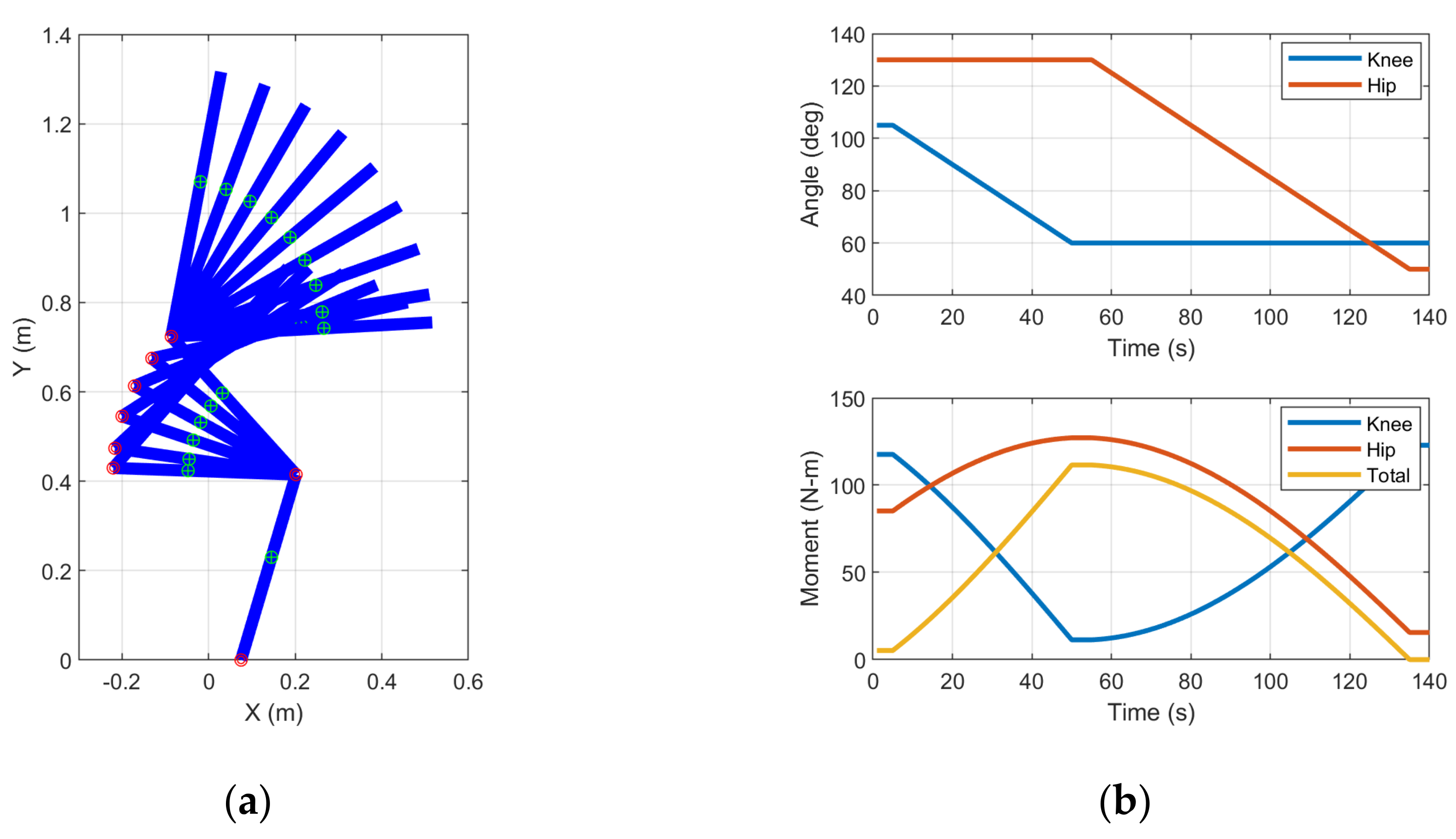
2.2. Estimation of Knee and Hip Moments from the Human Model
3. Wheelchair–Exoskeleton Hybrid Robot
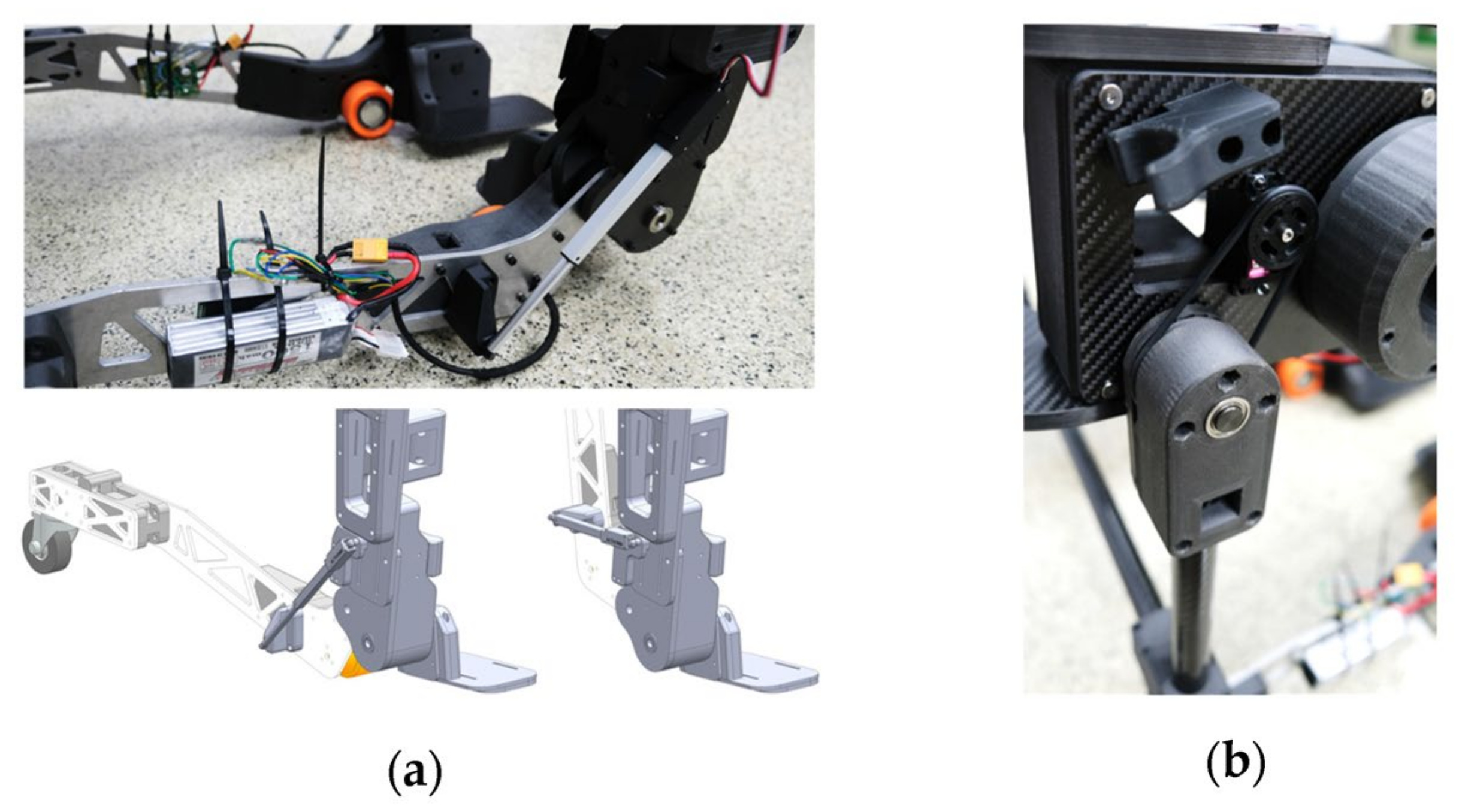
3.1. Experimental Prototype
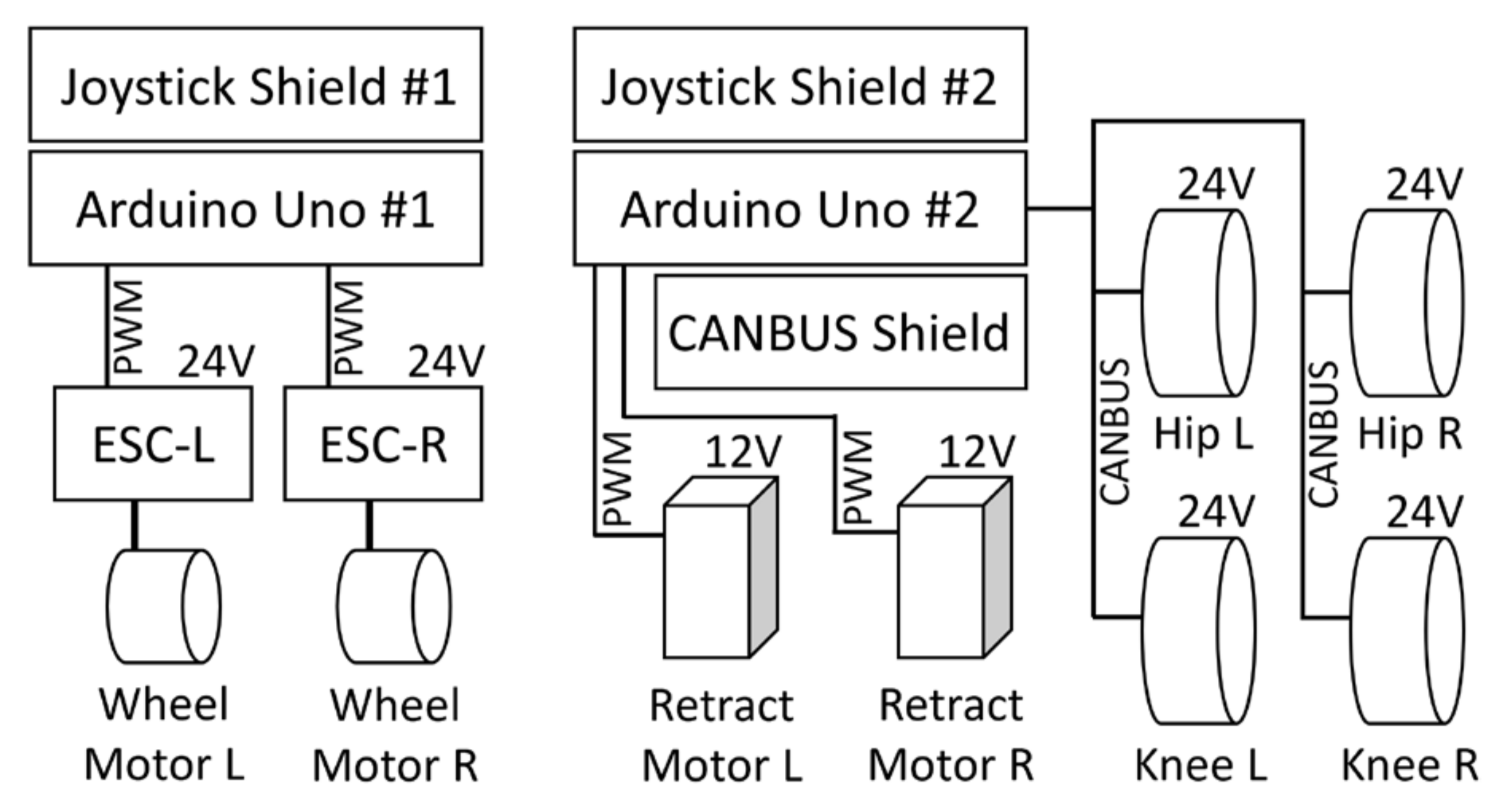
3.2. Control System Integration
4. Sit-to-Stand and Stand-to-Sit Experiment
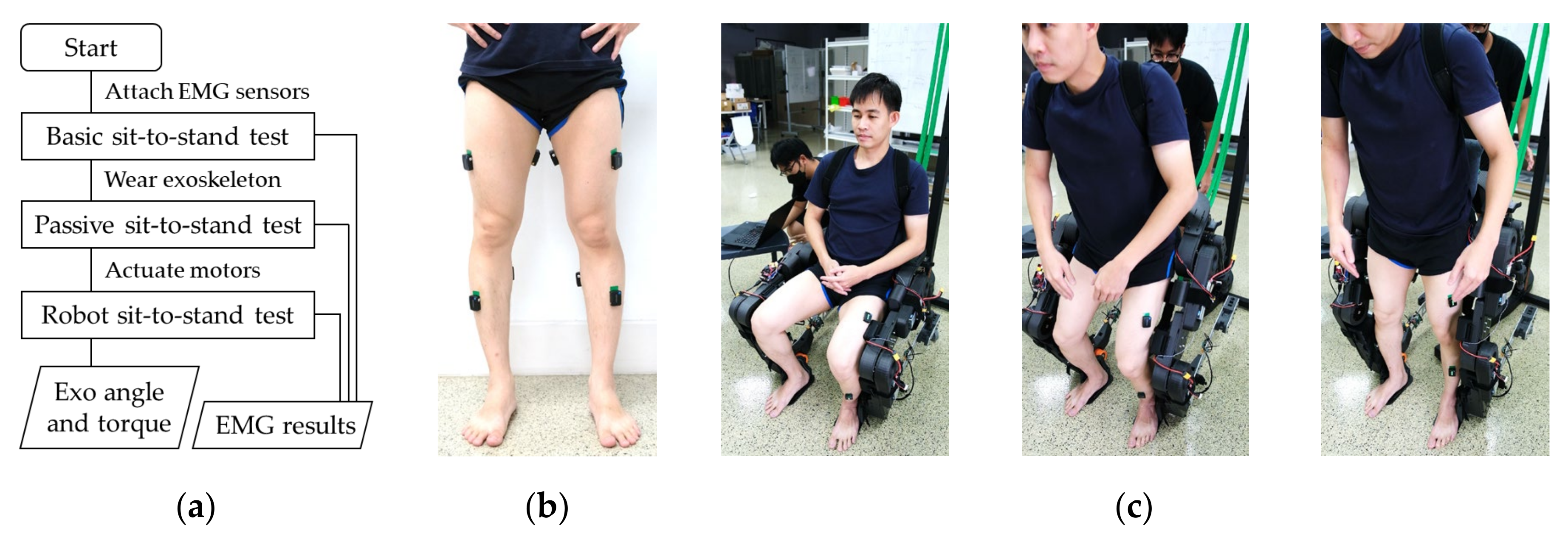
4.1. Experimental Setup and Procedure
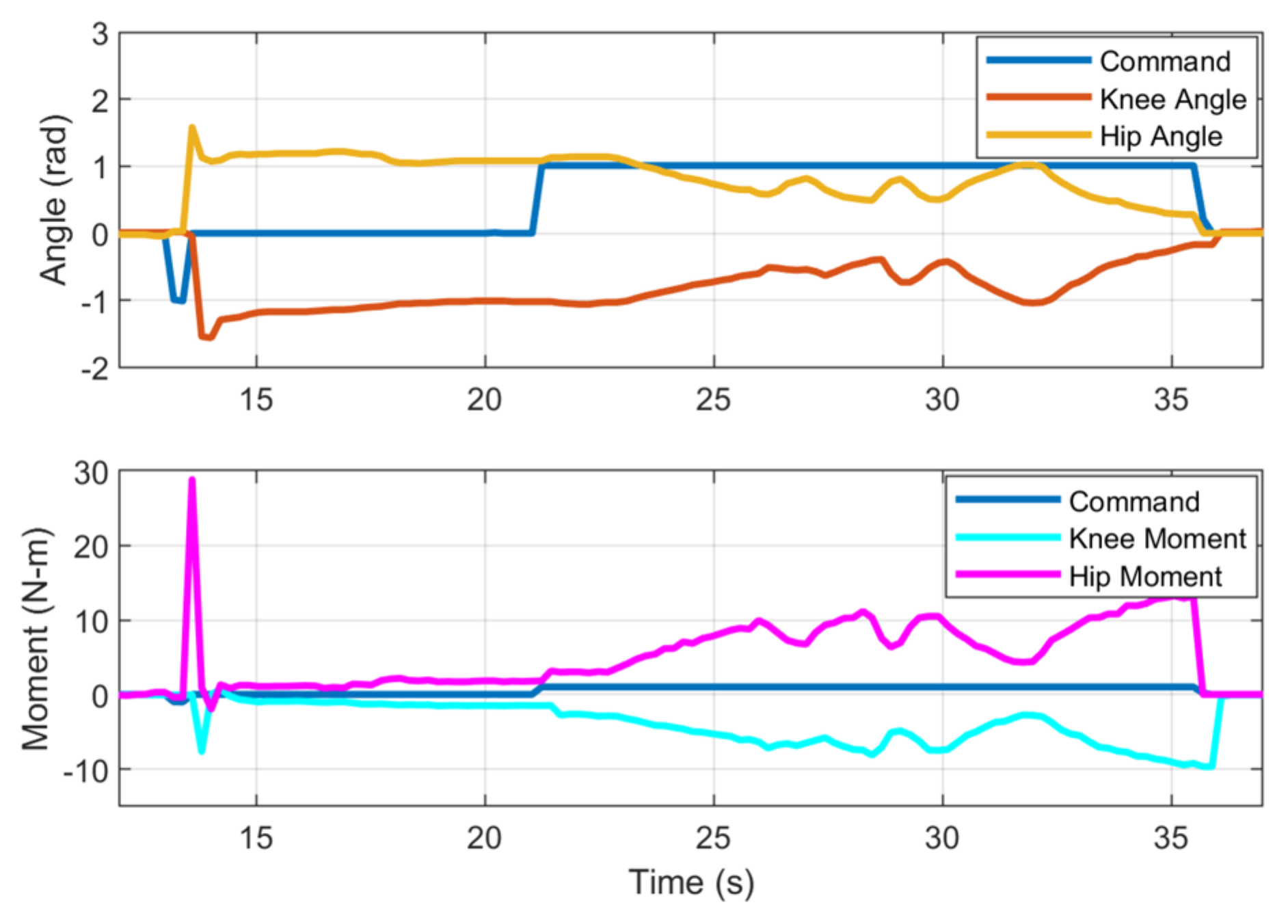
4.2. Recorded Position and Torque of the Exoskeleton Motors
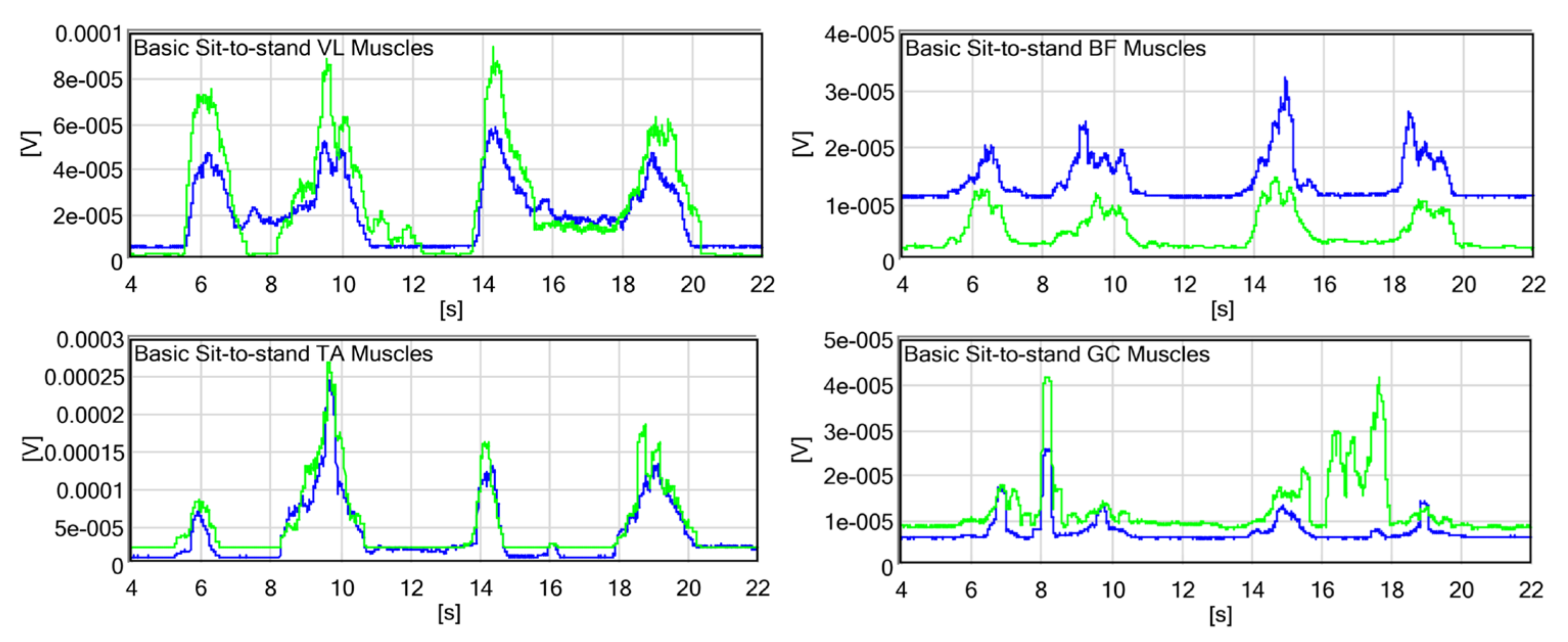
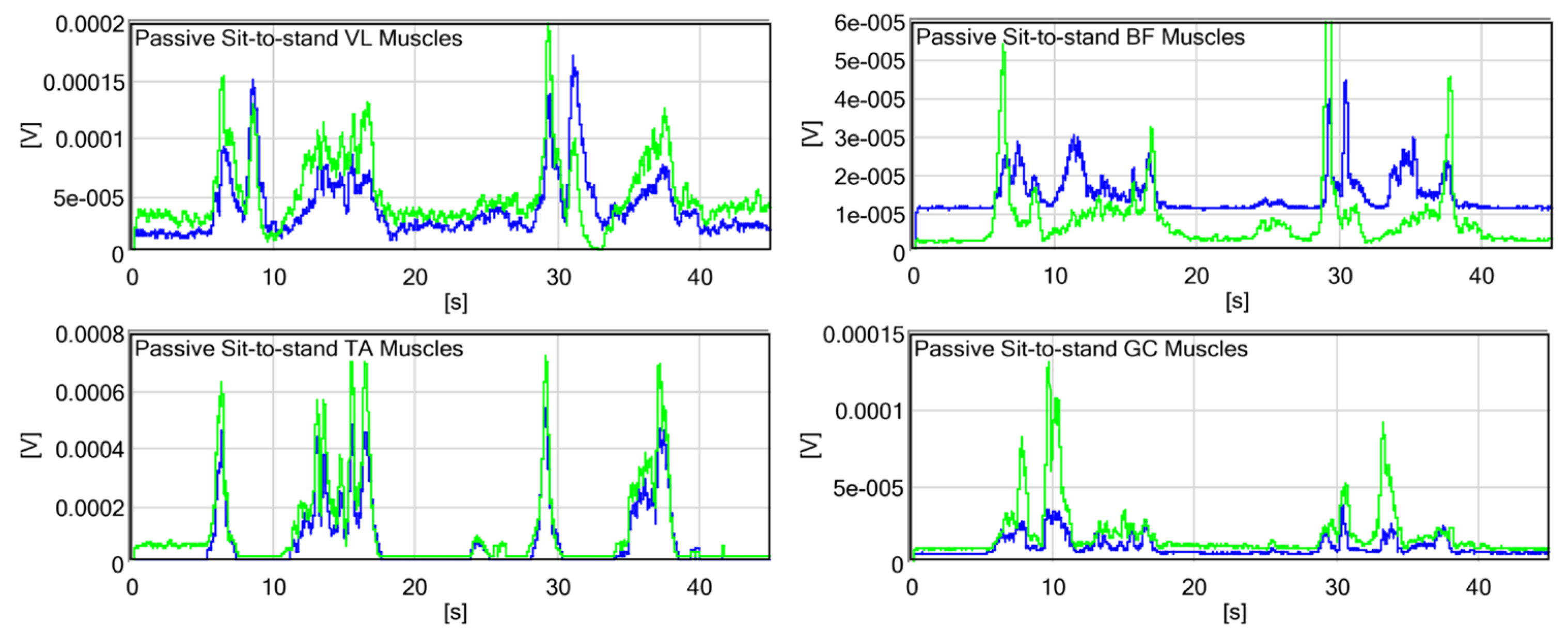
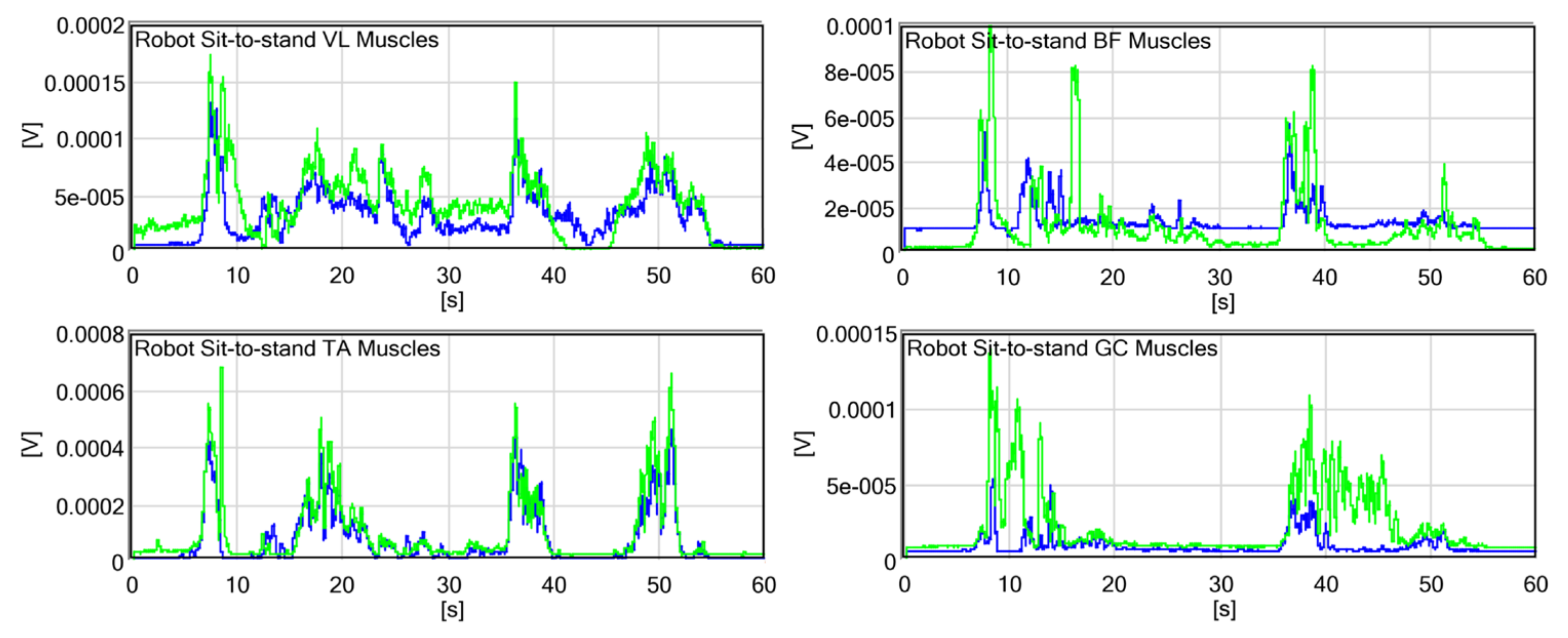
4.3. Leg Muscle Activity Observed via Surface EMG
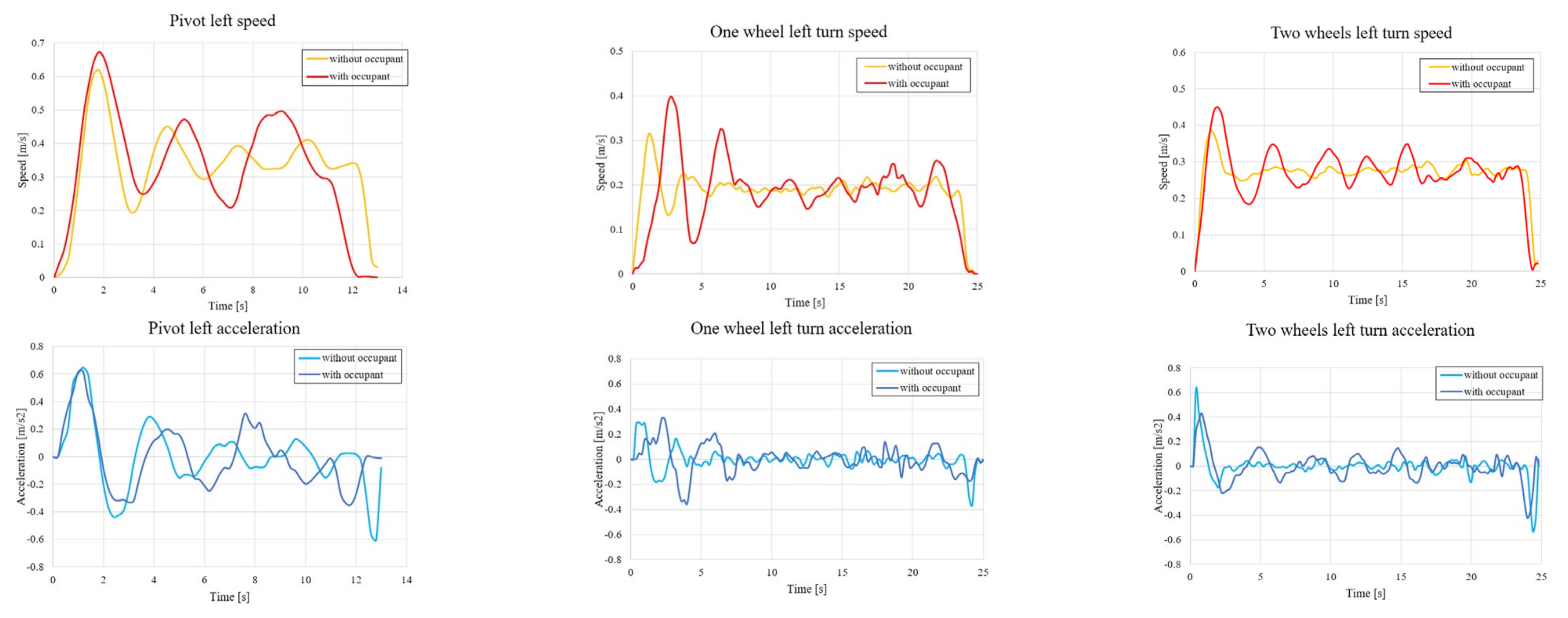
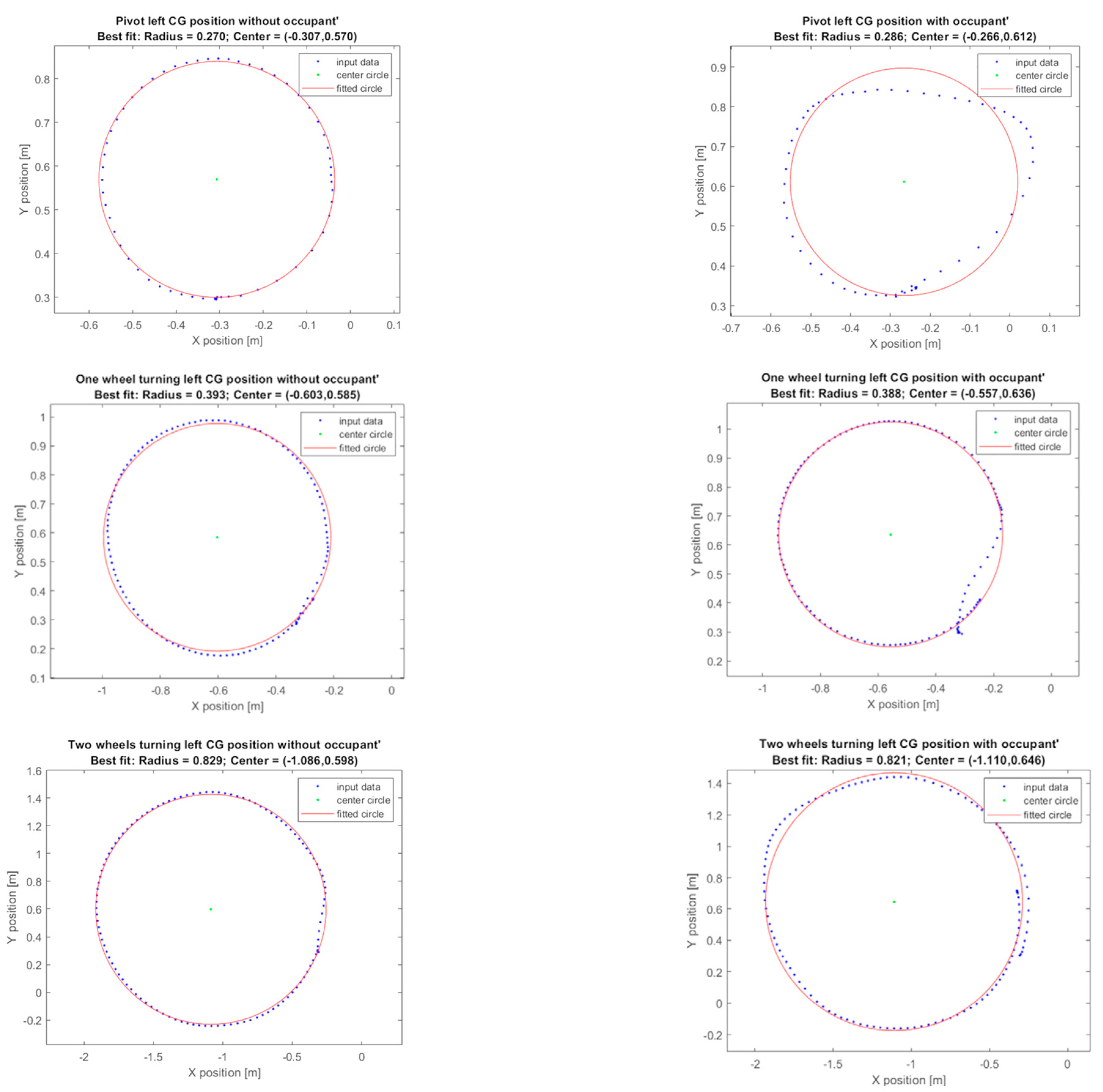
5. Differential Driving Experiment
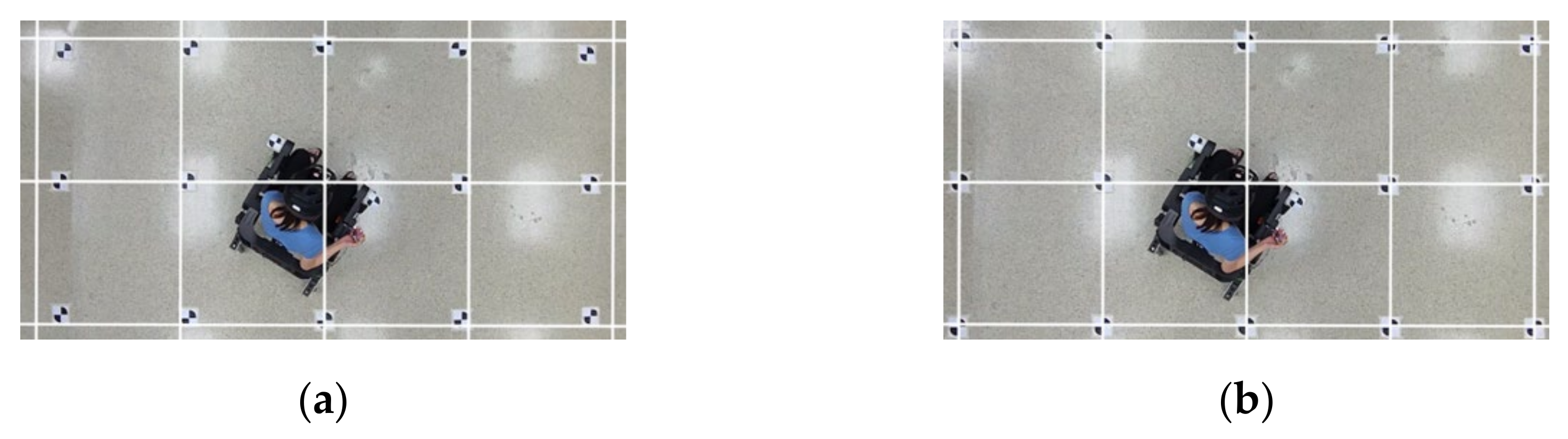
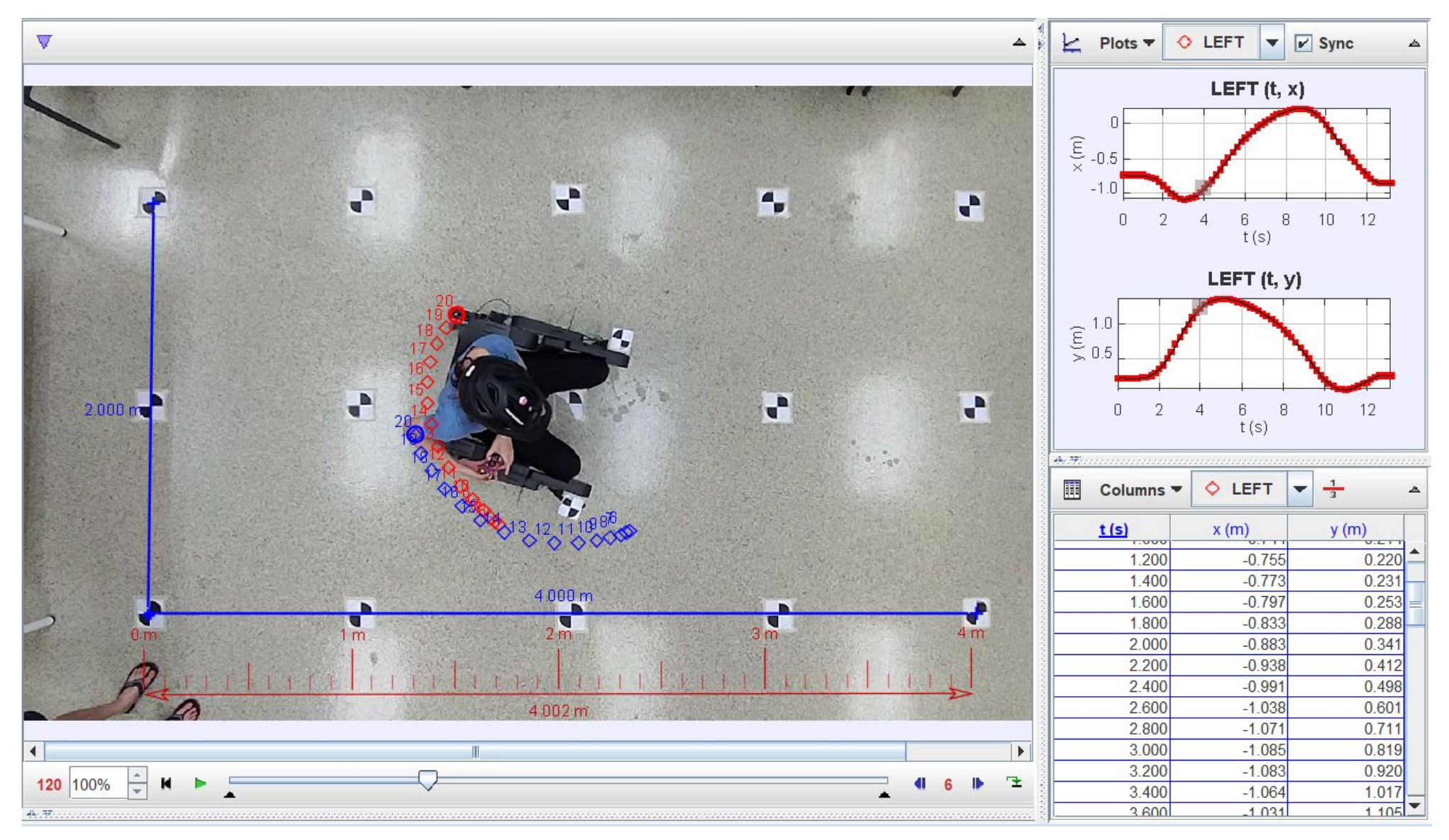
5.1. Experimental Setup and Procedure
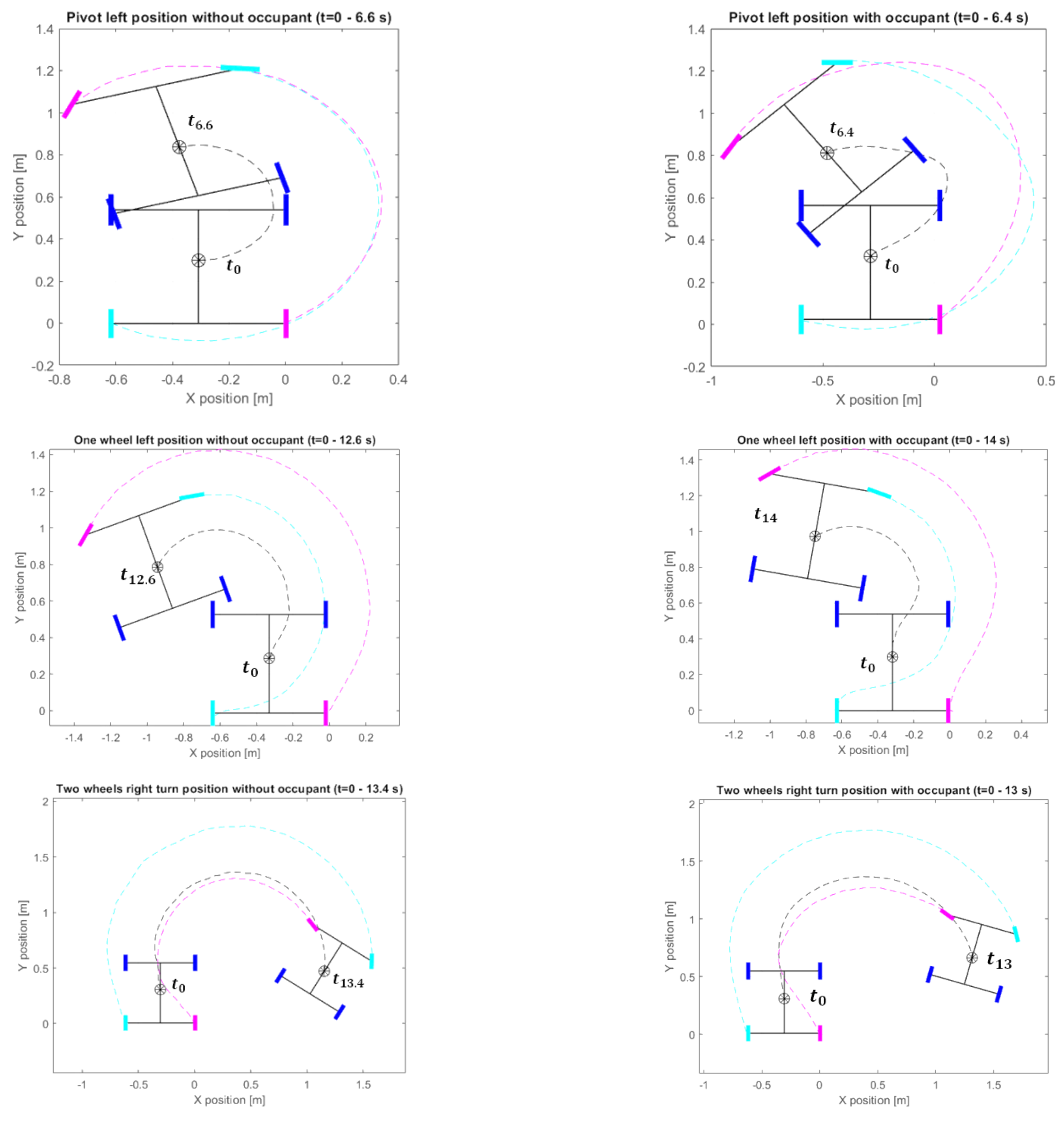
5.2. Experimental Results
6. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sarraj, A.R.; Massarelli, R. Design history and advantages of a new lever-propelled wheelchair prototype. Int. J. Adv. Robot Syst. 2011, 8, 12–21. [Google Scholar] [CrossRef]
- Sasaki, K.; Eguchi, Y.; Suzuki, K. Step-climbing wheelchair with lever propelled rotary legs. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–3 October 2015; pp. 6354–6359. [Google Scholar]
- Lawn, M.J.; Ishimatsu, T. Modeling of a stair-climbing wheelchair mechanism with high single step capability. IEEE Trans. Neural Syst. Rehabil. Eng. 2003, 11, 323–332. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chatterjee, P.; Lahiri, N.; Bhattacharjee, A.; Chakraborty, A. Automated hybrid stair climber for physically challenged people. In Proceedings of the International Conference on Electronics, Materials Engineering & Nano-Technology, Kolkata, India, 24–26 September 2021; pp. 1–4. [Google Scholar]
- Suryanto, M.F.I.; Badriawan, N.A.; Ningrum, E.S.; Binugroho, E.H.; Satria, N.F. Balance control on the development of electric wheelchair prototype with standing and stair climbing ability with tracked-wheel mechanism. In Proceedings of the 2018 International Electronics Symposium on Engineering Technology and Applications, Bali, Indonesia, 29–30 October 2018; pp. 43–47. [Google Scholar]
- Munton, J.S.; Ellis, M.I.; Chamberlain, M.A.; Wright, V. An investigation into the problems of easy chairs used by the arthritic and the elderly. Rheum. Rehabil. 1981, 20, 164–173. [Google Scholar] [CrossRef] [PubMed]
- Mano, Y.; Sakakibara, T.; Takayanagi, T. Kinesiological analysis of standing-up movement. Excerpta Med. Int Congr. Ser. 1988, 804, 503–512. [Google Scholar]
- Levo: Products. Available online: https://www.levo.ch/products (accessed on 11 December 2022).
- Superior ME. Available online: http://Superiorstanding.mamutweb.com/subdet1.htm (accessed on 11 December 2022).
- Eguchi, Y.; Kadone, H.; Suzuki, K. Standing mobility device with passive lower limb exoskeleton for upright locomotion. IEEE ASME Trans. Mechatron. 2018, 23, 1608–1618. [Google Scholar] [CrossRef]
- Hayashi, T.; Kawamoto, H.; Sankai, Y. Control method of robot suit HAL working as operator’s muscle using biological and dynamical information. In Proceedings of the 2005 IEEE/RSJ International Conference Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3063–3068. [Google Scholar]
- Mertz, L. The next generation of exoskeletons: Lighter, cheaper devices are in the works. IEEE Pulse 2012, 3, 56–61. [Google Scholar] [CrossRef] [PubMed]
- Zeilig, G.; Weingarden, H.; Zwecker, M.; Dudkiewicz, I.; Bloch, A.; Esquenazi, A. Safety and tolerance of the ReWalk™ exoskeleton suit for ambulation by people with complete spinal cord injury: A pilot study. J. Spinal Cord Med. 2012, 35, 96–101. [Google Scholar] [CrossRef] [Green Version]
- Barbareschi, G.; Richards, R.; Thornton, M.; Carlson, T.; Holloway, C. Statically vs dynamically balanced gait: Analysis of a robotic exoskeleton compared with a human. In Proceedings of the 2015 IEEE/EMBS Annual International Conference, Milan, Italy, 25–29 August 2015; pp. 6728–6731. [Google Scholar]
- Duddy, D.; Doherty, R.; Connolly, J.; McNally, S.; Loughrey, J.; Faulkner, M. The effects of powered exoskeleton gait training on cardiovascular function and gait performance: A systematic review. Sensors 2021, 21, 3207. [Google Scholar] [CrossRef]
- Borisoff, J.F.; Mattie, J.; Rafer, V. Concept proposal for a detachable exoskeleton-wheelchair to improve mobility and health. In Proceedings of the 2013 IEEE International Conference on Rehabilitation Robotics, Seattle, WA, USA, 24–26 June 2013. [Google Scholar]
- Shankar, T.; Dwivedy, S.K. A hybrid assistive wheelchair-exoskeleton. In Proceedings of the 2015 International Convention on Rehabilitation Engineering and Assistive Technology, Singapore, 5–7 November 2015. [Google Scholar]
- Song, Z.; Tian, C.; Dai, J.S. Mechanism design and analysis of a proposed wheelchair-exoskeleton hybrid robot for assisting human movement. Mech. Sci. 2019, 10, 11–24. [Google Scholar] [CrossRef] [Green Version]
- Chaichaowarat, R.; Nishimura, S.; Krebs, H.I. Macro-mini linear actuator using electrorheological-fluid brake for impedance modulation in physical human–robot interaction. IEEE Robot Autom. Lett. 2022, 7, 2945–2952. [Google Scholar] [CrossRef]
- Chaichaowarat, R.; Nishimura, S.; Krebs, H.I. Design and modeling of a variable-stiffness spring mechanism for impedance modulation in physical human–robot interaction. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation, Xi’an, China, 30 May–5 June 2021; pp. 7052–7057. [Google Scholar]
- Millington, P.J.; Myklebust, B.M.; Shambes, G.M. Biomechanical analysis of the sit-to-stand motion in elderly persons. Arch. Phys. Med. Rehabil. 1992, 73, 609–617. [Google Scholar] [PubMed]
- Chorin, F.; Cornu, C.; Beaune, B.; Frere, J.; Rahmani, A. Sit to stand in elderly fallers vs non-fallers: New insights from force platform and electromyography data. Aging Clin. Exp. Res. 2016, 28, 871–879. [Google Scholar] [CrossRef]
- Pal, A.R.; Pratihar, D.K. Estimation of joint torque and power consumption during sit-to-stand motion of human-being using a genetic algorithm. Procodia Comp. Sci. 2016, 96, 1497–1506. [Google Scholar] [CrossRef] [Green Version]
- Glowinski, S.; Ptak, M. A kinematic model of a humanoid lower limb exoskeleton with pneumatic actuators. Acta Bioeng. Biomech. 2022, 24, 145–157. [Google Scholar] [CrossRef]
- Huo, W.; Mohammed, S.; Amirat, Y.; Kong, K. Active impedance control of a lower limb exoskeleton to assist sit-to-stand movement. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016; pp. 3530–3536. [Google Scholar]
- Tsukahara, A.; Kawanishi, R.; Hasegawa, Y.; Sankai, Y. Sit-to-stand and stand-to-sit transfer support for complete paraplegic patients with robot suit HAL. Adv. Robot 2010, 24, 1615–1638. [Google Scholar] [CrossRef] [Green Version]
- Fattah, A.; Agrawal, S.K.; Catlin, G.; Hamnett, J. Design of a passive gravity-balanced assistive device for sit-to-stand tasks. J. Mech. Des. 2006, 128, 1122–1129. [Google Scholar] [CrossRef]
- Elibol, E.; Calderon, J.; Llofriu, M.; Moreno, W.; Weitzenfeld, A. Analyzing and reducing energy usage in a humanoid robot during standing up and sitting down tasks. Int. J. Hum. Robot 2016, 13, 1650014. [Google Scholar] [CrossRef]
- Kim, J.; Yang, J.; Yang, S.T.; Oh, Y.; Lee, G. Energy-efficient hip joint offsets in humanoid robot via Taguchi method and bioinspired analysis. Appl. Sci. 2020, 10, 7287. [Google Scholar] [CrossRef]
- Elibol, E.; Calderon, J.; Llofriu, M.; Quintero, C.; Moreno, W.; Weitzenfeld, A. Power usage reduction of humanoid standing process using Q-learning. In RoboCup 2015: Robot World Cup XIX, Lecture Notes in Computer Science; Almeida, L., Ji, J., Steinbauer, G., Luke, S., Eds.; Springer: Cham, Switzerland, 2015; 9513; pp. 251–263. [Google Scholar]
- De Leva, P. Adjustments to Zatsiorsky–Seluyanov’s segment inertia parameters. J. Biomech. 1996, 29, 1223–1230. [Google Scholar] [CrossRef] [PubMed]
- Chaichaowarat, R.; Granados, D.F.P.; Kinugawa, J.; Kosuge, K. Passive knee exoskeleton using torsion spring for cycling assistance. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vancouver, BC, Canada, 24–28 September 2017; pp. 3069–3074. [Google Scholar]
- Chaichaowarat, R.; Wannasuphoprasit, W. Full-slip kinematics based estimation of vehicle yaw rate from differential wheel speeds. KSAE Int. J. Automot. Tech. 2016, 17, 81–88. [Google Scholar] [CrossRef]
- Chaichaowarat, R.; Wannasuphoprasit, W. Kinematics-based analytical solution for wheel slip angle estimation of a RWD vehicle with drift. Eng. J. 2016, 20, 89–107. [Google Scholar] [CrossRef]
- Chaichaowarat, R.; Wannasuphoprasit, W. Wheel slip angle estimation of a planar mobile platform. In Proceedings of the 1st International Symposium on Instrumentation, Control, Artificial Intelligence, and Robotics, Bangkok, Thailand, 16–18 January 2019; pp. 163–166. [Google Scholar]
- Chaichaowarat, R.; Kinugawa, J.; Kosuge, K. Unpowered knee exoskeleton reduces quadriceps activity during cycling. Engineering 2018, 4, 471–478. [Google Scholar] [CrossRef]
- Chaichaowarat, R.; Kinugawa, J.; Kosuge, K. Cycling enhance knee exoskeleton using planar spiral spring. In Proceedings of the 2018 IEEE/EMBS Annual International Conference, Honolulu, HI, USA, 18–21 July 2018; pp. 3206–3211. [Google Scholar]
- Chaichaowarat, R.; Kinugawa, J.; Seino, A.; Kosuge, K. A spring-embedded planetary-geared parallel elastic actuator. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Boston, MA, USA, 6–9 July 2020; pp. 952–959. [Google Scholar]
- Javadi, A.; Chaichaowarat, R. Position and stiffness control of an antagonistic variable stiffness actuator with input delay using super-twisting sliding mode control. Nonlinear Dyn. 2022, 1–23. [Google Scholar] [CrossRef]
- Chaichaowarat, R.; Macha, V.; Wannasuphoprasit, W. Passive knee exoskeleton using brake torque to assist stair ascent. In Proceedings of the 2020 IEEE Region 10 Conference, Osaka, Japan, 16–19 November 2020; pp. 1165–1170. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Link | Mass (kg) | Length (mm) | CG Position (mm) |
|---|---|---|---|
| Thigh | = 0.01 × (14.16 × 2) × | = 422.2 | = 0.01 × (40.95 × 422.2) measured from hip joint |
| Shank | = 0.01 × (4.33 × 2) × | = 434.0 | = 0.01 × (44.59 × 434.0) measured from knee joint |
| Body-Head | = 0.01 × (43.46 + 6.94) × | 603.3 + 242.9 from vertex to hip joint | = [0.01/(43.46 + 6.94)] × [43.46 × (48.62 × 603.3) + 6.94 × (603.3 + 49.98 × 242.9)] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaichaowarat, R.; Prakthong, S.; Thitipankul, S. Transformable Wheelchair–Exoskeleton Hybrid Robot for Assisting Human Locomotion. Robotics 2023, 12, 16. https://doi.org/10.3390/robotics12010016
Chaichaowarat R, Prakthong S, Thitipankul S. Transformable Wheelchair–Exoskeleton Hybrid Robot for Assisting Human Locomotion. Robotics. 2023; 12(1):16. https://doi.org/10.3390/robotics12010016
Chicago/Turabian StyleChaichaowarat, Ronnapee, Sarunpat Prakthong, and Siri Thitipankul. 2023. "Transformable Wheelchair–Exoskeleton Hybrid Robot for Assisting Human Locomotion" Robotics 12, no. 1: 16. https://doi.org/10.3390/robotics12010016